FLAC3D隧道开挖模拟程序的锚杆部分
FLAC_3D的锚杆拉拔数值模拟试验_江文武
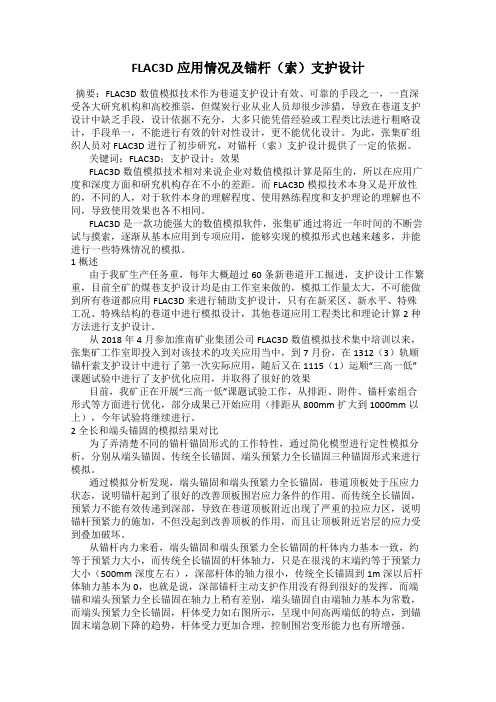
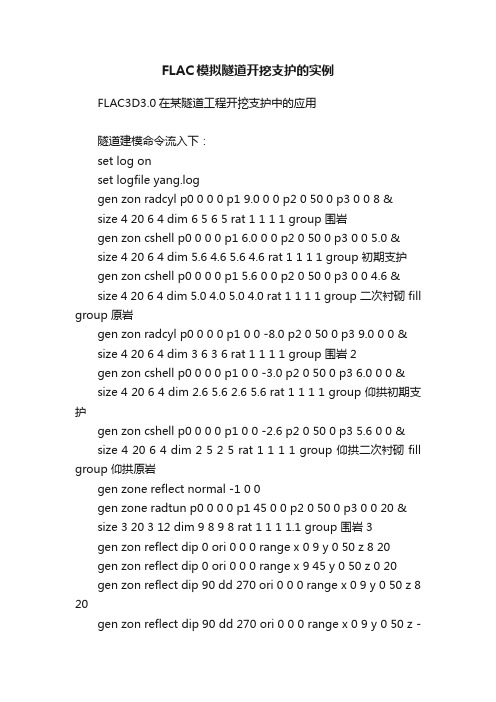
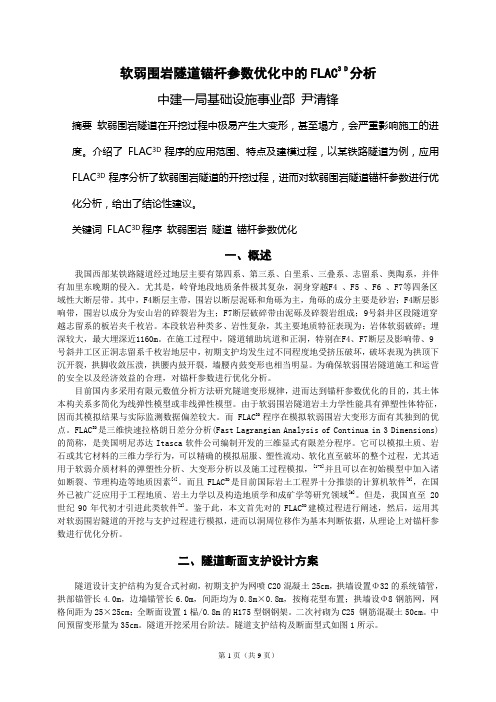
图 3 网格剖分图
szz
Z sxx X
锚杆
X Y
sxx
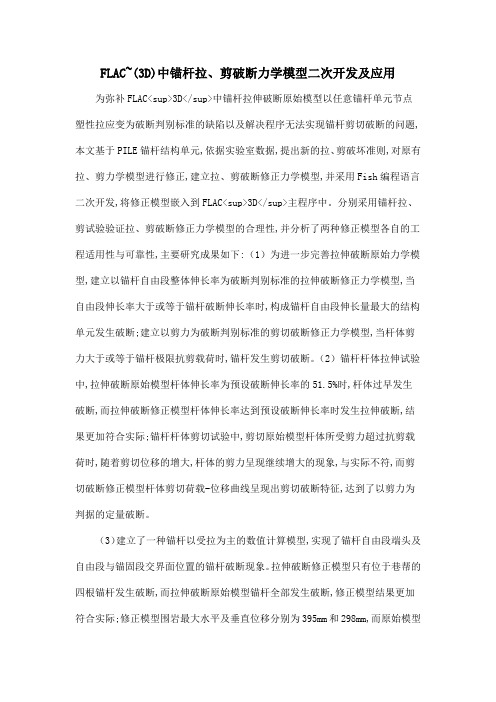
沿锚杆轴 向施加固 定的速度 v
szz 7.5m
10 m 5 m 限制 Y 方向的位移
图 4 锚杆拉拔数值模型示意图
为了模拟锚杆拉拔过程中的影响因素,即影 响锚杆锚固的效应的因素:1) 模拟了在同样的外 部条件下,唯有浆体的摩擦角( φg = 00 ,100 ,200 , 300 ,400 ) 不同的条件作用下沿着锚杆轴向、径向 锚杆的应力与应变的分布规律以及锚杆的锚固 力、浆体界面上的剪应力分布特征;2) 模拟了在 同样的外部条件下,唯有浆体有效围压( σm = 0, 2,4,6,8 MPa) 不同的条件作用下沿着锚杆轴向、 径向锚杆的应力与应变的分布规律以及锚杆的锚 固力、浆体界面上的剪应力分布特征;同时还模拟 了锚杆在拉拔过程中,锚索与岩体间的界面发生 剪切屈服、产生滑动直至拉拔破坏具体过程.
·130·
哈尔滨工业大学学报
第 41 卷
变形和强度起着重要的作用[1 ~ 4]. 加锚岩体的数 值模拟方法大都还是基于有限元法,但一般都过 低估计锚固效果. 然而 FLAC - 3D 即三维快速拉 格朗日分析方法的出现,又为锚杆在岩体锚固机 理提供了新的机遇. 本文就锚固体的摩擦角、有效 围压等对锚杆锚固性能的影响作了分析,对锚杆 拉拔过程中锚杆锚固失效的特点进行了探索,并 将现场试验与数值模拟计算进行了对比和分析.
3 数值模拟试验结果
通过多种方案的数值模拟试验可知图 5( a) 是现场试验得到一系列的力与位移之间的曲线, 从图 5( a) 中得知锚杆直径为 15. 2 mm 的锚杆锚 固力 = 17 t / m. 图 5( b) 是根据现场的地质条件建 模后计算得到的锚杆所受力与位移之间的曲线, 图 5(b)中显示当锚杆自由端施加的力小于某一 值时,力与位移基本成正比关系,当力达到一定值 即锚 固 力 时,力 保 持 不 变,而 位 移 呈 无 限 增 大 趋 势,说明锚杆已经整体失稳,锚固作用失效,图 6
FLAC3D应用情况及锚杆(索)支护设计
FLAC3D应用情况及锚杆(索)支护设计摘要:FLAC3D数值模拟技术作为巷道支护设计有效、可靠的手段之一,一直深受各大研究机构和高校推崇,但煤炭行业从业人员却很少涉猎,导致在巷道支护设计中缺乏手段,设计依据不充分,大多只能凭借经验或工程类比法进行粗略设计,手段单一,不能进行有效的针对性设计,更不能优化设计。
为此,张集矿组织人员对FLAC3D进行了初步研究,对锚杆(索)支护设计提供了一定的依据。
关键词:FLAC3D;支护设计;效果FLAC3D数值模拟技术相对来说企业对数值模拟计算是陌生的,所以在应用广度和深度方面和研究机构存在不小的差距。
而FLAC3D模拟技术本身又是开放性的,不同的人,对于软件本身的理解程度、使用熟练程度和支护理论的理解也不同,导致使用效果也各不相同。
FLAC3D是一款功能强大的数值模拟软件,张集矿通过将近一年时间的不断尝试与摸索,逐渐从基本应用到专项应用,能够实现的模拟形式也越来越多,并能进行一些特殊情况的模拟。
1 概述由于我矿生产任务重,每年大概超过60条新巷道开工掘进,支护设计工作繁重,目前全矿的煤巷支护设计均是由工作室来做的,模拟工作量太大,不可能做到所有巷道都应用FLAC3D来进行辅助支护设计,只有在新采区、新水平、特殊工况、特殊结构的巷道中进行模拟设计,其他巷道应用工程类比和理论计算2种方法进行支护设计。
从2018年4月参加淮南矿业集团公司FLAC3D数值模拟技术集中培训以来,张集矿工作室即投入到对该技术的攻关应用当中,到7月份,在1312(3)轨顺锚杆索支护设计中进行了第一次实际应用,随后又在1115(1)运顺“三高一低”课题试验中进行了支护优化应用,并取得了很好的效果目前,我矿正在开展“三高一低”课题试验工作,从排距、附件、锚杆索组合形式等方面进行优化,部分成果已开始应用(排距从800mm扩大到1000mm以上),今年试验将继续进行。
2全长和端头锚固的模拟结果对比为了弄清楚不同的锚杆锚固形式的工作特性,通过简化模型进行定性模拟分析,分别从端头锚固、传统全长锚固、端头预紧力全长锚固三种锚固形式来进行模拟。
FLAC~(3D)中锚杆拉、剪破断力学模型二次开发及应用
FLAC~(3D)中锚杆拉、剪破断力学模型二次开发及应用为弥补FLAC<sup>3D</sup>中锚杆拉伸破断原始模型以任意锚杆单元节点塑性拉应变为破断判别标准的缺陷以及解决程序无法实现锚杆剪切破断的问题,本文基于PILE锚杆结构单元,依据实验室数据,提出新的拉、剪破坏准则,对原有拉、剪力学模型进行修正,建立拉、剪破断修正力学模型,并采用Fish编程语言二次开发,将修正模型嵌入到FLAC<sup>3D</sup>主程序中。
分别采用锚杆拉、剪试验验证拉、剪破断修正力学模型的合理性,并分析了两种修正模型各自的工程适用性与可靠性,主要研究成果如下:(1)为进一步完善拉伸破断原始力学模型,建立以锚杆自由段整体伸长率为破断判别标准的拉伸破断修正力学模型,当自由段伸长率大于或等于锚杆破断伸长率时,构成锚杆自由段伸长量最大的结构单元发生破断;建立以剪力为破断判别标准的剪切破断修正力学模型,当杆体剪力大于或等于锚杆极限抗剪载荷时,锚杆发生剪切破断。
(2)锚杆杆体拉伸试验中,拉伸破断原始模型杆体伸长率为预设破断伸长率的51.5%时,杆体过早发生破断,而拉伸破断修正模型杆体伸长率达到预设破断伸长率时发生拉伸破断,结果更加符合实际;锚杆杆体剪切试验中,剪切原始模型杆体所受剪力超过抗剪载荷时,随着剪切位移的增大,杆体的剪力呈现继续增大的现象,与实际不符,而剪切破断修正模型杆体剪切荷载-位移曲线呈现出剪切破断特征,达到了以剪力为判据的定量破断。
(3)建立了一种锚杆以受拉为主的数值计算模型,实现了锚杆自由段端头及自由段与锚固段交界面位置的锚杆破断现象。
拉伸破断修正模型只有位于巷帮的四根锚杆发生破断,而拉伸破断原始模型锚杆全部发生破断,修正模型结果更加符合实际;修正模型围岩最大水平及垂直位移分别为395mm和298mm,而原始模型围岩最大水平及垂直位移分别为428mm和332mm,原始模型较修正模型围岩变形强烈,这是由于原始模型锚杆全部破断导致的。
FLAC^3D中锚杆支护的数值模拟研究综述
收稿日期:202003?09基金项目:贵州理工学院高层次人才科研启动经费支持项目(0203001018029);国家安监总局2018年安全生产重大事故防治关键技术科技项目(guizhou-0005-2018AQ);国家留学基金资助项目(201908520017)作者简介:杜学领(1986-),男,满族,河北承德人,博士,副教授,研究方向为煤岩体动力灾害机理及防治。
doi:10.3969/j.issn.1005-2798.2020.09.001FLAC3D中锚杆支护的数值模拟研究综述杜学领(贵州理工学院矿业工程学院,贵州贵阳 550003)摘 要:锚杆是目前煤矿、岩土等支护工程中常用的材料,在FLAC3D中可进行锚杆支护的多角度数值模拟研究,文章对FLAC3D锚杆支护的数值模拟研究进行总结和展望。
分析表明:目前FLAC3D中建立锚杆模型以Cable、Pile两结构单元较多,可采用Beam、Liner等构建金属钢、托盘、锚喷层等支护要素。
FLAC3D一般作为验证性手段,对实验、实践内容进行证明。
重点总结了锚杆及支护构件、预应力锚杆、煤矿巷道支护、岩土工程支护、特殊锚杆的实现等研究进展。
当前的研究应用中,存在复杂工程问题的动态还原能力相对较弱、时空与时步不对应、研究细节缺失及二次开发的非公开性、对理论研究的支撑作用相对薄弱等问题。
未来,FLAC3D依然作为重要的模拟手段应用于新型支护理论和支护技术的验证,并可在跨平台建模及跨平台研究、精细化建模与多因素耦合研究等方面取得新的突破。
关键词:FLAC3D;锚杆支护;数值模拟;巷道支护;文献综述中图分类号:TD353 文献标识码:A 文章编号:10052798(2020)09?0001?15ReviewofNumericalSimulationofRockBoltSupportinFLAC3DDUXueling(InstituteofMiningEngineering,GuizhouInstituteofTechnology,Guiyang 550003,China)Abstract:Theboltisacommonlyusedmaterialincoalmines,geotechnicalandothersupportingprojects.ThemultianglenumericalsimulationofrockboltsupportcanbecarriedoutinFLAC3D.Thispapersummarizesandforecaststheboltsupportnumericalsimula tioninFLAC3D.TheresearchshowsthatcableandpilestructureelementareusedfrequentlyincurrentrockboltmodelinFLAC3D,andbeam,linercanbeusedtobuildelementssuchasmetalsteel,trayandanchorspraylayer.FLAC3Disgenerallyusedasaverificationtooltoprovethetruthofexperimentalandpracticalcontent.Theresearchprogressofboltsandsupportingelements,pre?tensionedanchors,coalmineroadwaysupport,geotechnicalengineeringsupportandmodelingofspecialboltsaresummarized.Inthecurrentre searchapplications,thereareproblemssuchasrelativelyweakdynamicrestorationofcomplexengineeringproblems,non?correspon dencebetweenrealtimeandstepsinFLAC3D,lackofresearchdetailsandnon?disclosureofsecondaryapplication,andrelativelyweaksupportfortheoreticalresearch.Inthefuture,FLAC3Dstillcanbeusedasanimportantsimulationmethodfortheverificationofnewsupporttheoryandtechnology,andcanmakenewbreakthroughsincross?platformmodelingandcross?platformresearch,andrefinedmodelingandmultifactorcouplingresearch.Keywords:FLAC3D;rockboltsupport;numericalsimulation;roadwaysupport;literaturereview 锚杆作为一种岩土锚固中的重要材料,被广泛应用于边坡、坝体、基坑、隧道、巷道等工程场合,锚杆的使用距今已有100多年的历史[1]。
flac3d模拟锚杆三种方法

sel cable pro slide=on
plot add sel cable force yellow red
plot add sel cable grout slip
sel delete link range id 17
sel link id=200 17 target zone
sel link attach xdir=rigid ydir=rigid zdir=rigid xrdir=rigid yrdir=rigid zrdir=rigid range id 200
n
gen zone radtun p0 0 0 0 p1 25 0 0 p2 0 50 0 p3 0 0 25 size 4 25 4 10 dim 4 4 4 4 ratio 1 1 1 1.1 fill
gen zone reflect normal 1 0 0 ori 0 0 0
gen zone reflect normal 0 0 1 ori 0 0 0
sel cable id 1 pretension 60e3 range cid 1,10
pl set rot 90 0 0
pl sel cabl force
pl add sel geom cid on
step 2000
save sy.sav
Flac3d输出:
1 Edit copy to clipboard 粘贴到word
sel cable id 1 pretension 60e3 range cid 1,10
Flac3D锚杆模拟及开挖、充填1

gr_k=10e8 gr_coh=2e10 gr_per=0.75 gr_fric=20 range cid 1,1
sel cable id j pretension 9.0e4 range cid 1,10
gr_k=1 gr_coh=1 gr_per=0.75 gr_fric=20 range cid 2,10
sel cable prop emod=100e9 yTens=90e7 xcarea=1.5e-3 &
gr_k=5.35e6 gr_coh=4.2e6 gr_per=0.75 gr_fric=20 range cid 11,17
end_command
end_loop
end_if
end_loop
end
ins_cab
step 500
save ins_cab.sav
plot set cap size 25
plot add sketch
plot add sel cable force red
fix y range y 19.9 20.1
fix z range z -530.1 -529.9
apply szz -3.64e6 grad 0 0 0.0423e6
apply sxx -11.48e6 grad 0 0 0.0967e6
apply sxx 1.99e6 grad 0 0 0.0208e6
gr_k=1 gr_coh=1 gr_per=0.75 gr_fric=20 range cid 2,10
FLAC模拟隧道开挖支护的实例
FLAC模拟隧道开挖支护的实例FLAC3D3.0在某隧道工程开挖支护中的应用隧道建模命令流入下:set log onset logfile yang.loggen zon radcyl p0 0 0 0 p1 9.0 0 0 p2 0 50 0 p3 0 0 8 &size 4 20 6 4 dim 6 5 6 5 rat 1 1 1 1 group 围岩gen zon cshell p0 0 0 0 p1 6.0 0 0 p2 0 50 0 p3 0 0 5.0 &size 4 20 6 4 dim 5.6 4.6 5.6 4.6 rat 1 1 1 1 group 初期支护gen zon cshell p0 0 0 0 p1 5.6 0 0 p2 0 50 0 p3 0 0 4.6 &size 4 20 6 4 dim 5.0 4.0 5.0 4.0 rat 1 1 1 1 group 二次衬砌 fill group 原岩gen zon radcyl p0 0 0 0 p1 0 0 -8.0 p2 0 50 0 p3 9.0 0 0 &size 4 20 6 4 dim 3 6 3 6 rat 1 1 1 1 group 围岩2gen zon cshell p0 0 0 0 p1 0 0 -3.0 p2 0 50 0 p3 6.0 0 0 &size 4 20 6 4 dim 2.6 5.6 2.6 5.6 rat 1 1 1 1 group 仰拱初期支护gen zon cshell p0 0 0 0 p1 0 0 -2.6 p2 0 50 0 p3 5.6 0 0 &size 4 20 6 4 dim 2 5 2 5 rat 1 1 1 1 group 仰拱二次衬砌 fill group 仰拱原岩gen zone reflect normal -1 0 0gen zone radtun p0 0 0 0 p1 45 0 0 p2 0 50 0 p3 0 0 20 &size 3 20 3 12 dim 9 8 9 8 rat 1 1 1 1.1 group 围岩3gen zon reflect dip 0 ori 0 0 0 range x 0 9 y 0 50 z 8 20gen zon reflect dip 0 ori 0 0 0 range x 9 45 y 0 50 z 0 20gen zon reflect dip 90 dd 270 ori 0 0 0 range x 0 9 y 0 50 z 8 20gen zon reflect dip 90 dd 270 ori 0 0 0 range x 0 9 y 0 50 z -8 -20gen zon reflect dip 90 dd 270 ori 0 0 0 range x 9 45 y 0 50 z -20 20gen zon brick p0 -45 0 -20 p1 -45 0 -40 p2 -45 50 -20 p3 45 0 -20 &size 5 20 6 rat 1.1 1 1 group 围岩4save tun_model.sav假设围岩岩体符合mohr-coulomb本构模型,给围岩赋参数命令流如下,; mohr-coulomb modelmodel mohrdef derives_mod1=E_mod1/(2.0*(1.0+p_ratio1))b_mod1=E_mod1/(3.0*(1.0-2.0*p_ratio1))s_mod2=E_mod2/(2.0*(1.0+p_ratio2))b_mod2=E_mod2/(3.0*(1.0-2.0*p_ratio2))endset E_mod1=0.6e9 p_ratio1=0.27 E_mod2=0.8e9 p_ratio2=0.26deriveprop bulk b_mod1 shear s_mod1 cohe 1.8e6 tens 0.8e6 fric 30 range z 4.5 20prop bulk b_mod2 shear s_mod2 cohe 2.8e6 tens 1.0e6 fric 35 range z -40 4.5ini dens=2300set grav 0 0 -10; boundary and initial conditionsapply szz -1.4e6 range z 19.9 20.1fix z range z -40.1 -39.1fix x range x -45.1 -44.9fix x range x 44.9 45.1fix y range y 49.9 50.1hist unbalhist gp xdis 6.0,0,0hist gp zdis 0,0,5hist gp xdis 6.0,50,0hist gp zdis 0,50,5plot hist 3solvesave tun_nature.sav对后面计算而言,模型建立时岩体在开挖前认为位移已经终了,因此需要对位移进行“清零”,而应力可以保留。
基本FLAC 模拟与边际分析的锚杆方案选择
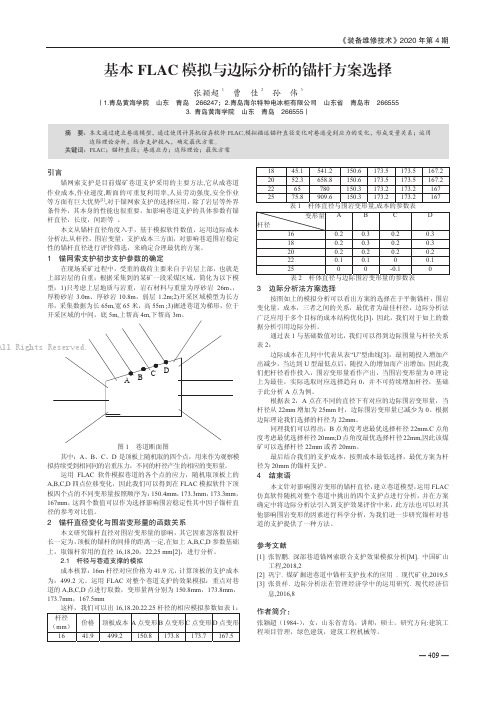
《装备维修技术》2020年第4期— 409 —基本FLAC 模拟与边际分析的锚杆方案选择张颖超1曹 佳2孙 伟3(1.青岛黄海学院 山东 青岛 266247;2.青岛海尔特种电冰柜有限公司 山东省 青岛市 2665553. 青岛黄海学院 山东 青岛 266555)摘 要:本文通过建立巷道模型,通过使用计算机仿真软件FLAC,模拟描述锚杆直径变化对巷道受到应力的变化,形成变量关系;运用边际理论分析,结合支护投入,确定最优方案。
关键词:FLAC;锚杆直径;巷道应力;边际理论;最优方案引言锚网索支护是目前煤矿巷道支护采用的主要方法,它从成巷道作业成本,作业速度,断面的可重复利用率,人员劳动强度,安全作业等方面有巨大优势[1],对于锚网索支护的选择应用,除了岩层等外界条件外,其本身的性能也很重要,如影响巷道支护的具体参数有锚杆直径,长度,间距等 。
本文从锚杆直径角度入手,基于模拟软件数值,运用边际成本分析法,从杆径,围岩变量,支护成本三方面,对影响巷道围岩稳定性的锚杆直径进行评价筛选,来确定合理最优的方案。
1 锚网索支护初步支护参数的确定在现场采矿过程中,受重的载荷主要来自于岩层上部,也就是上部岩层的自重;根据采集到的某矿一段采煤区域,简化为以下模型:1)只考虑上层地质与岩重,岩石材料与重量为厚砂岩26m 、,厚粉砂岩3.0m 、厚砂岩10.8m ,弱层1.2m;2)开采区域模型为长方形,采集数据为长65m,宽65米,高55m ;3)掘进巷道为梯形,位于其中:A 、B 、C 、D 是顶板上随机取的四个点,用来作为观察模拟持续受到相同同的岩重压力,不同的杆径产生的相应的变形量。
运用FLAC 软件模拟巷道的各个点的应力,随机取顶板上的A,B,C,D 四点位移变化,因此我们可以得到在FLAC 模拟软件下顶板四个点的不同变形量按照顺序为:150.4mm,173.3mm ,173.3mm ,167mm ,这四个数值可以作为选择影响围岩稳定性其中因子锚杆直径的参考对比值。
基于FLAC3D的高速公路隧道两种开挖方式稳定性分析
基于FLAC3D的高速公路隧道两种开挖方式稳定性分析采用数值计算对高速公路隧道施工过程进行分析,得到了施工过程中围岩的变形和支护结构的受力状态。
结果表明,随着开挖的推进,中隔墙上部以及洞侧壁处围压变形和应力较为集中,易产生相关地质灾害。
所以,在相关工程施工过程中应该对以上部位进行高质量的支护防灾。
对于底部在中墙位置隆起较为严重,所以应该加强此处的加固措施,条件允许是可开挖较深施做浅基础。
标签:隧道;围岩;数值计算1 概述近年来,随着经济建设及基础设施的快速发展,我国对于高速公路的需求越为强烈。
为更好的选线施工,减少施工期间地质灾害的威胁,方便施工以及满足交通需求,必须开山造路或者凿洞通路,这也就面临隧道开挖相关复杂地质问题。
目前,山岭隧道越来越多,比如川兰铁路的山岭隧道占到了线路总长的一半,而山岭隧道所遇到的围岩复杂多变,构造运动影响强烈,隧道断面的跨度也越来越大,所以不同的断面形式在一定方面适应复杂地区隧道的开挖。
随着开挖期间的多期次开挖扰动使得岩体强度明显减弱,岩体破碎严重,其自身稳定性明显降低,同时也造成后期施工难度加大,软弱夹层地带更为明显,易产生类型及机制较为复杂的地质灾害。
本文在基于FLAC数值软件的计算下,主要对Ⅵ级围岩下的大跨度隧道在不同的开挖方式下其对应围岩稳定性进行对比分析研究。
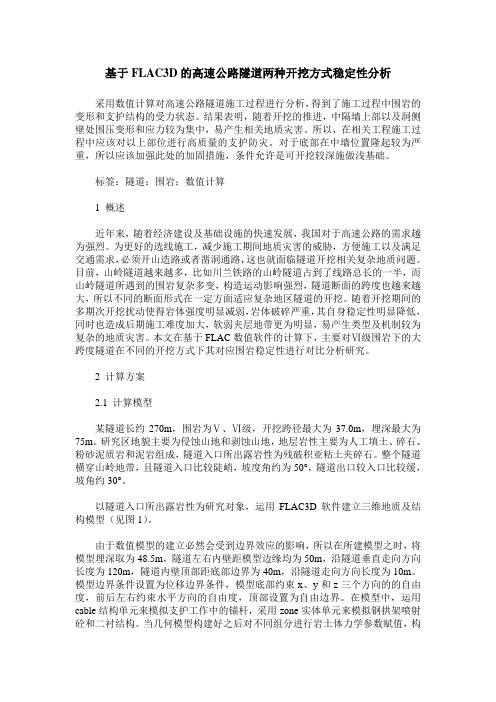
2 计算方案2.1 计算模型某隧道长约270m,围岩为Ⅴ、Ⅵ级,开挖跨径最大为37.0m,埋深最大为75m。
研究区地貌主要为侵蚀山地和剥蚀山地,地层岩性主要为人工填土、碎石、粉砂泥质岩和泥岩组成,隧道入口所出露岩性为残破积亚粘土夹碎石。
整个隧道橫穿山岭地带,且隧道入口比较陡峭,坡度角约为50°,隧道出口较入口比较缓,坡角约30°。
以隧道入口所出露岩性为研究对象,运用FLAC3D软件建立三维地质及结构模型(见图1)。
由于数值模型的建立必然会受到边界效应的影响,所以在所建模型之时,将模型埋深取为48.5m,隧道左右内壁距模型边缘均为50m,沿隧道垂直走向方向长度为120m,隧道内壁顶部距底部边界为40m,沿隧道走向方向长度为10m。
某隧道在锚喷支护下的FLAC3D数值分析
[1]陈育民,徐鼎平.FLAC/FLAC3D基础与工程实例[M].北京:中国水利水电出版社,2013.6
[2]刘波,韩彦辉编著FLAC原理实例与应用指南[M]北京:人民交通出版社2005
[3]王钜白石河2号隧道围岩分级与稳定性分析[D],[硕士学位论文].南昌:华东交通大学2008
作者简介:
(3)为防止拱底围岩底鼓,应即时进行支护。在选择支护措施上要根据围岩类别合理使用,尽量发挥不同支护措施的优势,在较低的成本下保证围岩的稳定性。
数值计算表明:在隧道开挖后应力场发生调整,围岩向隧道内收敛发生一定的变形,围岩发生适度的变形以释放部分应力,不致支护结构上的应力水平大幅度提高。软质岩体,隧道开挖后即使在支护条件下围岩都有不同程度的塑性变形出现。。计算分析表明,锚杆对限制围岩发生大变形效果显著,喷层对限制围岩张性破坏效果明显。随着支护措施的加强,塑性破坏区的范围明显减小;围岩整体上保持稳定。
其中:E为弹性模量、μ为泊松比。如表1所示。
2.4支护材料参数的确定
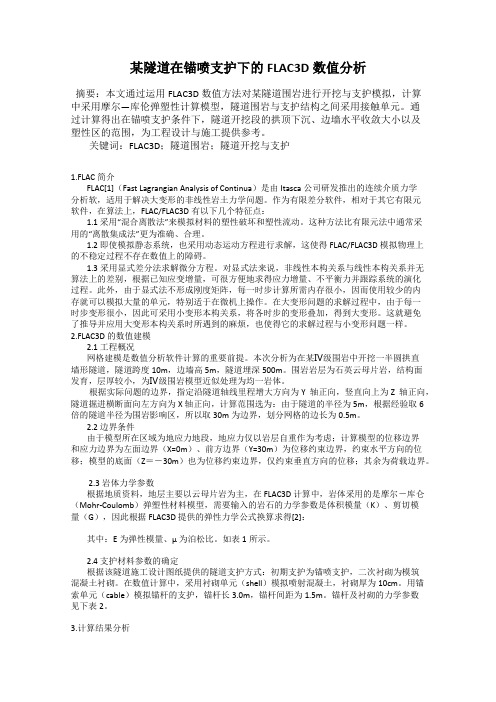
根据该隧道施工设计图纸提供的隧道支护方式:初期支护为锚喷支护,二次衬砌为模筑混凝土衬砌。在数值计算中,采用衬砌单元(shell)模拟喷射混凝土,衬砌厚为10cm。用锚索单元(cable)模拟锚杆的支护,锚杆长3.0m,锚杆间距为1.5m。锚杆及衬砌的力学参数见下表2。
3.1开挖支护后的计算结果
4.总结
(1)从图中可以看到,支护后塑性区明显比未支护的情况小了很多,支护后围岩的受力情况得到改善,竖直位移和水平位移都减少了。在位移曲线中可以明显的看到一个转折点,这是在施加初期支护后对围岩变形的限制,阻止了围岩的进一步变形所致。
(2)对软弱破碎围岩开挖后必须及时支护,如果支护不及时则使围岩物理力学性质恶化、松弛范围扩大,将造成围岩大变形、塌方等严重后果。从隧道开挖初期后的整体安全情况来看,拱肩处为最不稳定区域,其次为拱脚和拱顶[3]。
基于FLAC^(3D)的不同角度锚杆超前支护模拟及参数优化
基于FLAC^(3D)的不同角度锚杆超前支护模拟及参数优化曹思源;张淼;袁颖
【期刊名称】《河北地质大学学报》
【年(卷),期】2024(47)2
【摘要】锚杆作为一种有效支护措施,被广泛应用于隧道超前支护领域,超前锚杆设计及施作的好坏直接影响着隧道支护效果。
基于FLAC^(3D)有限元软件,对
0°~<50°不同角度分级锚杆进行了超前支护模拟,在揭露不同角度锚杆超前支护作用下隧道力学效应及其随锚杆角度变化规律的基础上,对支护角度进行了相关优化,最终确定出最佳支护角度。
研究结果可为隧道超前支护设计、优化及施工提供理论支撑,具有一定指导意义。
【总页数】5页(P56-60)
【作者】曹思源;张淼;袁颖
【作者单位】河北地质大学城市地质与工程学院;河北省地下人工环境智慧开发与管控技术创新中心
【正文语种】中文
【中图分类】P642.4
【相关文献】
1.基于FLAC3D的管缝锚杆与玻璃钢锚杆支护效果对比
2.基于FLAC3D的煤巷锚杆支护参数的模拟分析
3.基于 FLAC3D 复合顶板煤巷锚杆支护参数优化
4.桩锚支
护设计参数优化的FLAC3D数值模拟分析5.基于FLAC3D对不同荷载下锚杆锚固作用机制的数值模拟
因版权原因,仅展示原文概要,查看原文内容请购买。
洞山隧道锚杆支护作用的FLAC模拟

岩土工程界 第11卷 第11期地下工程 〔收稿日期〕 2008-03-27洞山隧道锚杆支护作用的F LAC 模拟黄泽军1 肖炀2(1.中国冶金建设集团成都勘察研究总院 2.安徽理工大学地球与环境学院)摘 要 结合洞山隧道工程实例,利用F LAC 软件在分析几何非线性和大变形问题方面的优越性能,对锚杆支护隧道的围岩变形、应力场分布、合理的锚杆支护及其支护作用等进行模拟。
模型运算得到的围岩变形量与实测变形量十分接近,说明模型中锚杆的支护参数比较合理,可以为下一步优化支护设计作指导。
关键词 洞山隧道 锚杆支护 F LAC 隧道是围岩与支护结构的综合体。
隧道开挖后,产生的围岩压力是由周围一定范围内的岩体与人工支护结构共同承担,围岩与支护结构看作“支护系统”。
通常情况下,隧道围岩的支护设计是根据勘察结果确定,但勘察往往具有很大局限性,这就必须在施工过程中根据实际揭露的围岩地质条件,调整支护方案。
这就必须对已支护的部分进行监测,观察其合理性。
同时,还需要用理论方法来进行对比分析,以便为下一步优化支护设计作指导。
本文以洞山隧道为例,采用F LAC 方法,对支护作用进行数值分析。
1 F LAC 程序简介F LAC (Fast Lagrangian Analysis of Continuum )分析软件是美国I T ASCA 咨询集团公司开发研制的一种以牛顿第二定律为基础的有限差分法程序,可以用来模拟岩土和其他材料的结构力学特性和响应。
它具有计算速度快、命令直观简单、用户界面友好等显著特点,是岩石力学数值分析的强有力工具。
有限差分法将待研究的受力体划分为区域和节点,通过节点联为一体。
在每个节点上所形成的运动方程是按时间迭代的办法求解的。
因此,我们就有可能清楚地看到受力体在不同的时间其力学特性与响应。
这是其他数值分析方法所不能实现的。
F LAC 内部含有多个力学模型,如摩尔-库仑模型,应变硬化/软化模型,节理模型及双屈服模型等,用以模拟高度非线性,不可逆等地质材料的变形特征。
基于FLAC 3D的煤巷锚杆支护参数的模拟分析
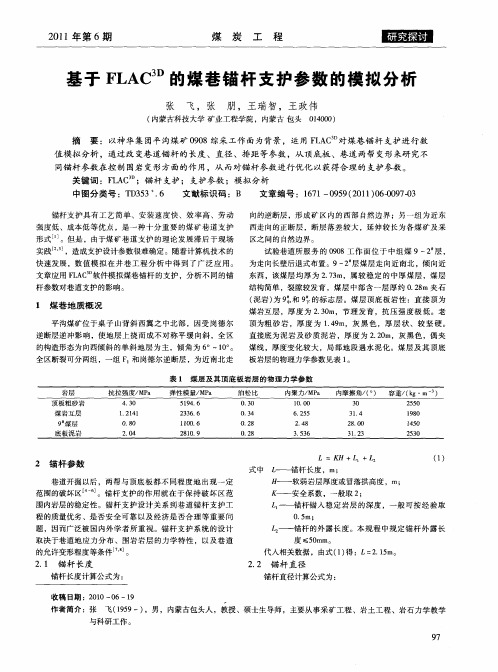
( 泥岩) 和 9 的标志层。煤层顶底板岩性 :直接顶为 为9 下 #
煤岩互层 ,厚 度 为 2 3 m,节理 发育 ,抗 压 强度 极 低。老 .0
顶为粗 砂 岩 ,厚 度 为 14 m,灰 黑 色 ,厚 层 状 、较 坚硬 。 .9
范 围的破 坏区H 。锚 杆 支护 的作用 就在 于保 持破 坏 区范 j 围内岩层 的稳定 性 。锚杆支 护设 计关 系到 巷道锚 杆支 护工
L :K + H 1+L 2 式 中 — — 锚 杆 长 度 ,m;
() 1
日 —一 软弱岩层厚度或 冒落拱高度 ,m;
— 一
安全 系数 ,一般取 2 ;
代人相关数据 ,由式 ( ) :a=13 m。 3得 .2
3 数值 模拟 分析 3 1 模 型建 立 .
针对神华集 团平 沟煤 矿 的地 质采矿 条件 ,根据 采矿 工
l
程 问题特点 ,建 立相应 的数值 分析模 型 ,考虑采 空 区的影
响 ,模型水平方 向上取 6 m,这样 既 可以模 拟 已开采煤 层 0 对地表 的影响和采 空 区周边 围岩 的响应状 态 ,又可 以模 拟 工作 面巷 道 掘进 的影 响。根 据 岩 层情 况 ,竖 直方 向上 取 5 m,巷道设计 高 X宽 =25 4 3 . m X m。采 用应 力 边界 条件 , 模型 的上边界施 加均匀 的垂 直压应力 ,模 型 的左右边 界限 制水平 向移 动 ,模型 下边界 固定 ,上 边界 自由 ] ,模 型如
结构简单 ,裂隙较发 育 ,煤层 中部 含一层 厚约 0 2 m 夹石 .8
1 煤巷 地质 概况
平沟煤矿位 于桌 子 山背 斜西翼 之 中北部 ,因受 岗德 尔 逆 断层逆冲影 响 ,使地 层上 挠而 成不 对称平 缓 向斜 ,全 区 的构造形态为 向西倾 斜的单 斜地 层为 主 ,倾角 为 6 。一1 。 O。
基于FLAC模拟的基坑锚杆(土钉)支护分析
因此 , 型 中土 钉 和锚 杆采 用 F A 模 L C中 的锚 杆单 元 (al cbe
关键词 : 杆( 锚 土钉 ) 护 , 坑 ,L C数 值 模 拟 支 基 FA
中图分类号 : 4 5 7 U 5 .1
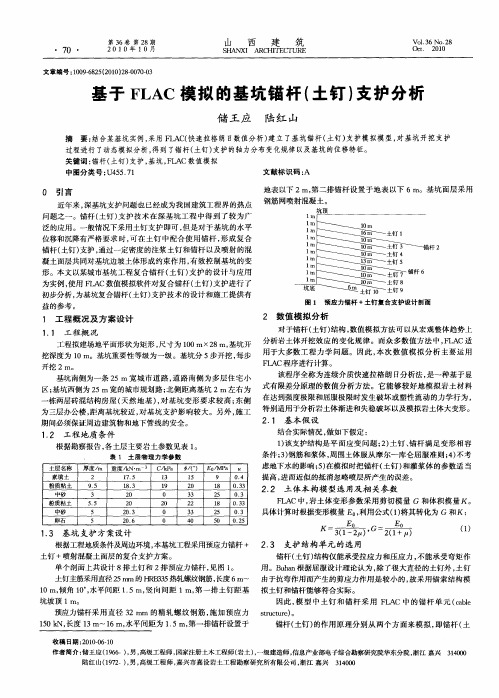
文献标识码 : A 地表 以下 2m, 二排 锚杆设置 于地表 以下 6m。基坑 面层采 用 第
坑 顶
0 引 言
问题之一。锚杆 ( 土钉) 护技术 在深基 坑工程 中得 到了较为广 支 泛 的应用。一般情况下采用土钉支护即可 , 但是对于基坑 的水平
2
形。本文 以某城市基坑工程 复合锚 杆 ( 土钉 ) 护的设计 与应用 支 为实例 , 使用 F A L C数值模拟软件 对复合锚杆 ( 土钉 ) 支护进行 了
初步分析 , 为基坑复合锚杆( 土钉 ) 支护技术 的设 计和施工提供有 益 的参考 。
图 1 预 应 力锚 杆 +土 钉 复 合 支护 设 计 剖 面
粉质粘土 中砂 卵石
55 . 5 5
2 0 2 . 03 2 . O6
2 0 0 0
2 2 3 3 4 0
1 8 2 5 5 0
0 3 .3 03 0 2 .5
具体计算 时根据变形模量 E。利用公式 () , 1将其转化为 G 和K:
K , G () 1
1 工 程概况及 方案 设计
1 1 工 程 概 况 .
2 数值 模拟分 析
对于锚杆( 土钉 ) 结构 , 数值模 拟方法可 以从宏 观整体趋势上
F AC适 工程拟建场地平 面形状为矩形 , 寸为 1 0r×2 基坑开 分析岩土体开挖效 应 的变化 规律 。而众 多数值方法 中 ,L 尺 0 n 8m, 用于大多数工 程力 学 问题 。因此 , 次数 值模 拟分 析 主要运 用 本 挖深度为 1 0m。基坑重要性等级为一级 。基坑分 5步开挖 , 每步 FA L C程序进行计算 。 开 挖 2m。 基坑南侧为一条 2 宽城市道 路 , 5m 道路南 侧为 多层住宅 小
flac3d数值模拟巷道锚杆模型

prop bulk 2.5e9 shear 1.87e9 cohesion 3.2e6 tension 1e6 friction 30 range group 灰岩
prop bulk 1.4e9 shear 0.87e9 cohesion 1.7e6 tension 0.3e6 friction 26 range group 底1
prop bulk 0.8e9 shear 0.56e9 cohesion 0.8e6 tension 0.1e6 friction 25 range group 煤
group 煤 range z 38 44.5 group 断层左
group 顶1 range z 44.5 48 group 断层左
group 顶2 range z 48 55 group 断层左
group 灰岩 range z 0 5.5 group 断层右
group 底2 range z 5.5 20.5 group 断层右
prop bulk 2.6e9 shear 2.5e9 cohesion 1.7e6 tension 0.3e6 friction 30 range group 顶1
prop bulk 2.6e9 shear 2.5e9 cohesion 3e6 tension 2e6 friction 30 range group 顶2
new
;断层左
gen zone brick size 30 50 55 &
p0 0 0 0 p1 50 0 0 p2 0 50 0 p3 0 0 55 p4 50 50 0 p5 0 50 55 p6 30 0 55 p7 30 50 55 rat 1 1 1 group 断层左
yantubbs-FLAC3D隧道开挖建模
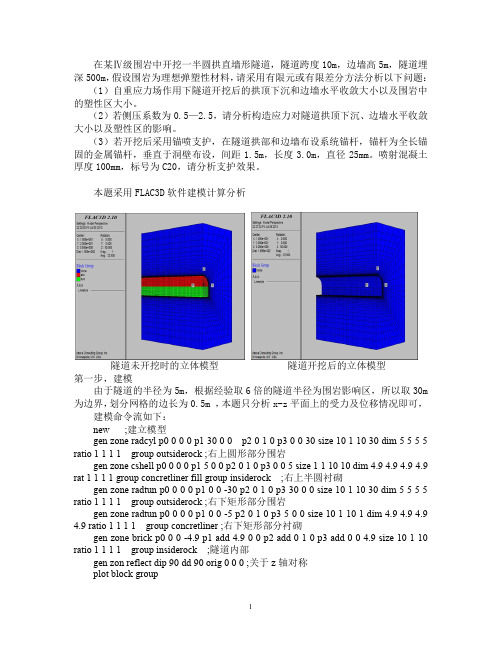
在某Ⅳ级围岩中开挖一半圆拱直墙形隧道,隧道跨度10m,边墙高5m,隧道埋深500m,假设围岩为理想弹塑性材料,请采用有限元或有限差分方法分析以下问题:(1)自重应力场作用下隧道开挖后的拱顶下沉和边墙水平收敛大小以及围岩中的塑性区大小。
(2)若侧压系数为0.5—2.5,请分析构造应力对隧道拱顶下沉、边墙水平收敛大小以及塑性区的影响。
(3)若开挖后采用锚喷支护,在隧道拱部和边墙布设系统锚杆,锚杆为全长锚固的金属锚杆,垂直于洞壁布设,间距1.5m,长度3.0m,直径25mm。
喷射混凝土厚度100mm,标号为C20,请分析支护效果。
本题采用FLAC3D软件建模计算分析隧道未开挖时的立体模型隧道开挖后的立体模型第一步,建模由于隧道的半径为5m,根据经验取6倍的隧道半径为围岩影响区,所以取30m 为边界,划分网格的边长为0.5m ,本题只分析x-z平面上的受力及位移情况即可,建模命令流如下:new ;建立模型gen zone radcyl p0 0 0 0 p1 30 0 0 p2 0 1 0 p3 0 0 30 size 10 1 10 30 dim 5 5 5 5 ratio 1 1 1 1 group outsiderock ;右上圆形部分围岩gen zone cshell p0 0 0 0 p1 5 0 0 p2 0 1 0 p3 0 0 5 size 1 1 10 10 dim 4.9 4.9 4.9 4.9 rat 1 1 1 1 group concretliner fill group insiderock ;右上半圆衬砌gen zone radtun p0 0 0 0 p1 0 0 -30 p2 0 1 0 p3 30 0 0 size 10 1 10 30 dim 5 5 5 5 ratio 1 1 1 1 group outsiderock ;右下矩形部分围岩gen zone radtun p0 0 0 0 p1 0 0 -5 p2 0 1 0 p3 5 0 0 size 10 1 10 1 dim 4.9 4.9 4.9 4.9 ratio 1 1 1 1 group concretliner ;右下矩形部分衬砌gen zone brick p0 0 0 -4.9 p1 add 4.9 0 0 p2 add 0 1 0 p3 add 0 0 4.9 size 10 1 10 ratio 1 1 1 1 group insiderock ;隧道内部gen zon reflect dip 90 dd 90 orig 0 0 0 ;关于z轴对称plot block groupplot add axes blacksave jianmo.sav(1)自重应力场作用下隧道开挖后的拱顶下沉和边墙水平收敛大小以及围岩中的塑性区大小。
论文:软弱围岩隧道锚杆参数优化中的FLAC3D分析(尹清锋)
软弱围岩隧道锚杆参数优化中的FLAC3 D分析中建一局基础设施事业部尹清锋摘要软弱围岩隧道在开挖过程中极易产生大变形,甚至塌方,会严重影响施工的进度。
介绍了FLAC3D程序的应用范围、特点及建模过程,以某铁路隧道为例,应用FLAC3D程序分析了软弱围岩隧道的开挖过程,进而对软弱围岩隧道锚杆参数进行优化分析,给出了结论性建议。
关键词FLAC3D程序软弱围岩隧道锚杆参数优化一、概述我国西部某铁路隧道经过地层主要有第四系、第三系、白垩系、三叠系、志留系、奥陶系,并伴有加里东晚期的侵入。
尤其是,岭脊地段地质条件极其复杂,洞身穿越F4 、F5 、F6 、F7等四条区域性大断层带。
其中,F4断层主带,围岩以断层泥砾和角砾为主,角砾的成分主要是砂岩;F4断层影响带,围岩以成分为安山岩的碎裂岩为主;F7断层破碎带由泥砾及碎裂岩组成;9号斜井区段隧道穿越志留系的板岩夹千枚岩。
本段软岩种类多、岩性复杂,其主要地质特征表现为:岩体软弱破碎;埋深较大,最大埋深近1160m。
在施工过程中,隧道辅助坑道和正洞,特别在F4、F7断层及影响带、9号斜井工区正洞志留系千枚岩地层中,初期支护均发生过不同程度地受挤压破坏,破坏表现为拱顶下沉开裂,拱脚收敛压溃,拱腰内鼓开裂,墙腰内鼓变形也相当明显。
为确保软弱围岩隧道施工和运营的安全以及经济效益的合理,对锚杆参数进行优化分析。
目前国内多采用有限元数值分析方法研究隧道变形规律,进而达到锚杆参数优化的目的,其土体本构关系多简化为线弹性模型或非线弹性模型。
由于软弱围岩隧道岩土力学性能具有弹塑性体特征,因而其模拟结果与实际监测数据偏差较大。
而FLAC3D程序在模拟软弱围岩大变形方面有其独到的优点。
FLAC3D是三维快速拉格朗日差分分析(Fast Lagrangian Analysis of Continua in 3 Dimensions)的简称,是美国明尼苏达Itasca软件公司编制开发的三维显式有限差分程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
end_loop
end
;右洞第二种锚杆
def fen_jiao4
h4=float(176.2934/15)
end
fen_jiao4
def cab2_right
;array x2_b(1,20),z2_b(1,20),x2_e(1,20),z2_e(1,20)
z2_b(1,n)=-8.35*sin(2.9574*degrad)
x2_e(1,n)=14.35-11.35*cos(2.9574*degrad)
z2_e(1,n)=-11.35*sin(2.9574*degrad)
end_loop
loop n(17,17)
z2_e(1,n)=9.85*sin(degrad*(1.8533+(n-1)*h4))
end_loop
loop n(7,10)
x2_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h4))+11.85
z2_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h4))
;第一种锚杆(左洞)
def fen_jiao
h1=float(164.5452/14) ;拱部锚杆
end
fen_jiao
def cab1_left ;左洞第一种锚杆
array x1_b(1,20),z1_b(1,20),x1_e(1,20),z1_e(1,20)
x1_b(1,n)=-14.35+8.35*cos(degrad*11.1915)
z1_b(1,n)=-8.35*sin(degrad*11.1915)
x1_e(1,n)=-14.35+11.35*cos(degrad*11.1915)
z1_e(1,n)=-11.35*sin(degrad*11.1915)
z1_e(1,n)=-12.35*sin(degrad*6.9372)
end_loop
loop n(18,18)
x1_b(1,n)=-1.40*cos(degrad*22.7303)-16.1037
z1_b(1,n)=-1.40*sin(degrad*22.7303)-1.64
z2_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h4))
end_loop
loop n(17,17)
x1_b(1,n)=-8.35*cos(degrad*6.9372)-9.35
z1_b(1,n)=-8.35*sin(degrad*6.9372)
x1_e(1,n)=-12.35*cos(degrad*6.9372)-9.35
x1_e(1,n)=8.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
z1_e(1,n)=8.85*sin(degrad*(1.8533+(n-1)*h2))
loop n(11,16)
x1_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
x2_e(1,n)=-8.85*sin(degrad*(n-8)*h3)+11.85
z2_e(1,n)=-8.85*cos(degrad*(n-8)*h3)
end_loop
loop n(16,16)
x2_b(1,n)=14.35-8.35*cos(2.9574*degrad)
loop n(1,6)
x2_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h4))+11.85
z2_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h4))
x2_e(1,n)=9.85*cos(degrad*(1.8533+(n-1)*h4))+11.85
z2_e(1,n)=-8.35*sin(11.1915*degrad)
end_loop
loop n(19,19)
x2_b(1,n)=9.35+8.35*cos(2.9574*degrad)
z2_b(1,n)=-8.35*sin(2.9574*degrad)
x2_e(1,n)=9.35+11.35*cos(2.9574*degrad)
loop n(1,8)
x1_b(1,n)=5.85*cos(degrad*(90-(8-n)*h1))-11.85
z1_b(1,n)=5.85*sin(degrad*(90-(8-n)*h1))
x1_e(1,n)=8.85*cos(degrad*(90-(8-n)*h1))-11.85
z1_e(1,n)=8.85*sin(degrad*(90-(8-n)*h1))
end_loop
loop n(9,15)
x1_b(1,n)=-5.85*sin(degrad*(n-8)*h1)-11.85
z1_b(1,n)=5.85*cos(degrad*(n-8)*h1)
end_loop
loop n(19,19)
x1_b(1,n)=-14.35+8.35*cos(degrad*2.9574)
z1_b(1,n)=-8.35*sin(degrad*2.9574)
x1_e(1,n)=-14.35+11.35*cos(degrad*2.9574)
x1_e(1,n)=-5.4*cos(degrad*22.7303)-16.1037
z1_e(1,n)=-5.4*sin(degrad*22.7303)-1.64
end_loop
loop n(19,19)
x1_b(1,n)=1.4*cos(degrad*22.7303)-7.9563
z1_b(1,n)=-1.4*sin(degrad*22.7303)-1.64
x1_e(1,n)=5.4*cos(degrad*22.7303)-7.5963
z1_e(1,n)=-5.4*sin(degrad*22.7303)-1.64
end_loop
loop n(20,20)
z1_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h2))
x1_e(1,n)=9.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
z1_e(1,n)=9.85*sin(degrad*(1.8533+(n-1)*h2))
x2_e(1,n)=8.85*cos(degrad*(1.8533+(n-1)*h4))+11.85
z2_e(1,n)=8.85*sin(degrad*(1.8533+(n-1)*h4))
loop n(11,16)
x2_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h4))+11.85
z1_e(1,n)=9.85*sin(degrad*(1.8533+(n-1)*h2))
end_loop
loop n(7,10)
x1_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
z1_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h2))
z1_b(1,n)=-8.35*sin(degrad*11.1915)
x1_e(1,n)=-11.35*cos(degrad*11.1915)-9.35
z1_e(1,n)=-11.35*sin(degrad*11.1915)
end_loop
loop n(18,18)
z1_e(1,n)=-11.35*sin(degrad*2.9574)
end_loop
end
;左洞第二种锚杆
def fen_jiao2
h2=float(176.2934/15) ;左洞第二种锚杆拱部
end
fen_jiao2
def cab2_left
;array x2_b(1,20),z2_b(1,20),x2_e(1,20),z2_e(1,20)
z2_e(1,n)=8.85*sin(degrad*(90-(8-n)*h3))
end_loop
loop n(9,15)
x2_b(1,n)=-5.85*sin(degrad*(n-8)*h3)+11.85
z2_b(1,n)=5.85*cos(degrad*(n-8)*h3)
loop n(1,6)
x1_b(1,n)=5.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
z1_b(1,n)=5.85*sin(degrad*(1.8533+(n-1)*h2))
x1_e(1,n)=9.85*cos(degrad*(1.8533+(n-1)*h2))-11.85
x1_b(1,n)=8.35*cos(degrad*6.9372)-11.85
z1_b(1,n)=-8.35*sin(degrad*6.9372)
x1_e(1,n)=12.35*cos(degrad*6.9372)-11.85
z1_e(1,n)=-12.35*sin(degrad*6.9372)
z1_b(1,n)=-8.35*sin(degrad*2.9574)
x1_e(1,n)=-11.35*cos(degrad*2.9574)-9.35