交流伺服电机规格型号一览表
伺服电机规格和安装尺寸
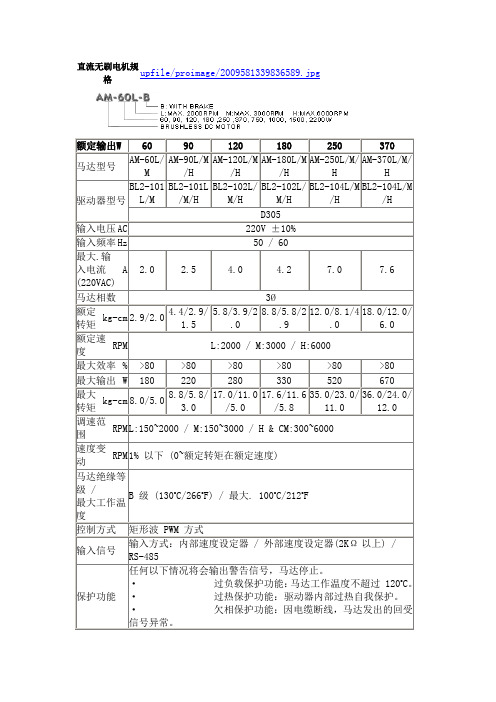
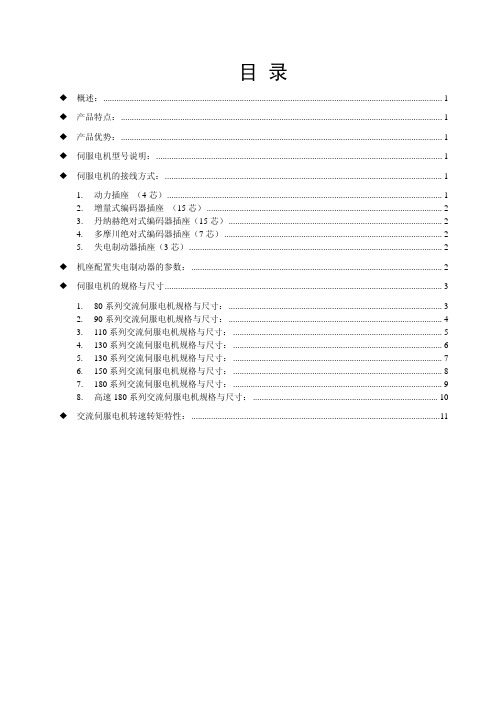
直流无刷电机规格upfile/proimage/2009581339836589.jpg额定输出W6090120180250370马达型号AM-60L/MAM-90L/M/HAM-120L/M/HAM-180L/M/HAM-250L/M/HAM-370L/M/H驱动器型号BL2-101L/MBL2-101L/M/HBL2-102L/M/HBL2-102L/M/HBL2-104L/M/HBL2-104L/M/HD305输入电压AC 220V ±10%输入频率Hz 50 / 60最大.输入电流(220VAC)A 2.0 2.5 4.0 4.2 7.0 7.6马达相数3Ø额定转矩kg-cm 2.9/2.04.4/2.9/1.55.8/3.9/2.08.8/5.8/2.912.0/8.1/4.018.0/12.0/6.0额定速度RPM L:2000 / M:3000 / H:6000最大效率% >80 >80 >80 >80 >80 >80最大输出W 180 220 280 330 520 670最大转矩kg-cm 8.0/5.08.8/5.8/3.017.0/11.0/5.017.6/11.6/5.835.0/23.0/11.036.0/24.0/12.0调速范围RPM L:150~2000 / M:150~3000 / H & CM:300~6000速度变动RPM 1% 以下 (0~额定转矩在额定速度)马达绝缘等级 /最大工作温度B 级 (130o C/266o F) / 最大. 100o C/212o F控制方式矩形波 PWM 方式输入信号输入方式:内部速度设定器 / 外部速度设定器(2KΩ以上) /RS-485保护功能任何以下情况将会输出警告信号,马达停止。
·过负载保护功能:马达工作温度不超过 120o C。
·过热保护功能:驱动器内部过热自我保护。
汇川全系列伺服电机说明汇总

高响应交流伺服电机――――3_1 ISMV&ISMH系列高响应交流伺服电机用户手册Ver0.0 深圳市汇川技术股份有限公司前言感谢您使用汇川公司ISMV&ISMH系列高响应交流伺服电机。
该系列交流伺服电机是一种快速响应、精确定位的交流伺服电机。
该产品需要配合伺服驱动器一起组成一套驱动系统,可用于各种需要精确定位、精密控制的场合。
在使用该系列电机之前,请您仔细阅读本使用说明书各项内容,以保证该电机的正确安装、连接、使用和维护。
注意事项♦本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
♦由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
♦由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
♦如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
♦客服电话:400-777-12601.1 安全及注意事项a、使用前用500V兆欧表检查电机U、V、W对电机外壳的绝缘电阻,应该不低于2MΩ。
b、使用时应有良好的接地。
c、电机转动时请不要用手触摸电机的轴伸。
d、不要撞击电机,以免造成光电编码器损坏。
e、装机前电机须空载与伺服驱动器联调正常。
1.2 产品使用环境海拔高度:1000米以下环境温度:0℃~40℃相对湿度:20%-80%(不得结露)IP等级:全封闭自冷却IP65、风冷IP54(轴贯通部分除外)电机需要安装在通风良好、且不能够太阳直晒的室内环境1.3 选配件本公司的电机默认都是带油封的,若不需要请在订货中注明,其余配件也请一并注明。
1.4 到货检查收到您订购的产品后,开箱检查以下内容,如有不符请您与订购的代理商或本公司联系。
a、请核对产品的铭牌,确认是否是您订购的产品。
b、检查电机外观有无在运输中损坏。
c、除产品本身以及使用说明书外,确认您所订购的附件是否完整。
1.5 搬运和储存该产品为精密制造产品,搬运以及使用中周转一定要轻拿轻放、防止碰撞,禁止敲击电机或用手提拉电机和光电编码器的引出线,以免造成产品损坏。
雷赛L5系列交流伺服选型手册
雷赛智能 第五代L5系列交流伺服电机与驱动器高性能 高品质低成本雷赛L5系列交流伺服应用场合优良的外观设计数控机床包装机印刷机雷赛第五代系列交流伺服系统每个精品的诞生都来自于对用户需求的深刻理解和对用户满意的执着追求!中国自动化设备厂家在性能、品质和成本等方面面临着越来越苛刻的客户要求和竞争压力! 采用进口交流伺服能保证运动控制的性能和品质,但是激烈的价格竞争往往使得设备厂家利润微薄甚至无利可图;采用国产伺服虽能显著降低设备成本,但运动性能却常常不如人意。
所以,进口伺服的运动性能加国产伺服的成本优势是很多中国设备厂家的梦想!雷赛智能的第五代精品交流伺服L5系列正是为帮助设备厂家实现这一梦想而精心打造,通过整合美国先进伺服算法、历时十年研发和五代升级。
L5系列具有高性能、高品质、低成本等特点,都是为了帮助用户制造出更有竞争优势和赢利能力的新一代设备。
17位编码器、陷波滤波、惯量估计、干扰观测和补偿等多目 录1、L5系列交流伺服系统简介 4 1.1产品性能 1.2电机与驱动对应表2、L5伺服驱动器简介 10 2.1伺服驱动器命名规则 2.2外部连接 2.3控制模式标准接线 2.4驱动器技术规格 2.5驱动器安装尺寸 4、L5配件简介 355、L5系列产品选购 393、L5伺服电机简介 19 3.1伺服电机命名规则 3.2伺服电机技术规格 3.3伺服电机安装尺寸 3.4伺服电机转矩特性1. L5系列交流伺服系统简介1.1 产品性能2500线(10,000ppr)编码器17位(131,072ppr)编码器优异的动态跟踪精度位置命令位置误差0 10 20 30 40 50 60 70 80 90时间(ms)※测试条件:雷赛600W,2500线伺服电机,带50%负载,通过雷赛自带Pro Tuner120 140 16018020060 80 1000 20 40时间(ms)抗共振的陷波滤波功能■内置陷波滤波器,可有效抑制中高频的机械共振●可抑制1500HZ以下的共振频率。
电机及驱动产品规格型号

SH-20803N-D 2 24~70VDC 1.5~3.1 A (峰值) √ √ 64
单脉冲
5
双端
√ 过流/过压/错相
42/56
SH-20806N-D 2 24~70VDC 3.0~6.2 A (峰值) √ √ 64
单脉冲
5
双端
√ 过流/过压/错相
56/86N
SH-20806CN 2 24~70VDC 1.4~6.2 A (峰值)
单脉冲
5
共阳
√√
错相
28/35/39/42/56
SH-20504 2 24~50VDC 2.5~4.0A (峰值)
40
√ 单/双脉冲 5
双端
√ √ 过流/过压/错相
56/86N
SH-20504D 2 24~50VDC 2.5~4.0A (峰值)
64
单/双脉冲 5
双端
√ √ 过流/过压/错相
56/86N
√2
单脉冲 5 共阴/阳 √ √
错相
42/56/86N
SH-20806D 2 60~100VAC 3.0~6.0 A (峰值)
√ 40
单脉冲
5
共阳
√√
过压
56/86N
SH-21006C 2 60~100VAC 4.0/ 6.0 A (有效值) √ 2
单脉冲 5/24 共阳
√ √ 过压/错相
86N/110
步距角 ( º)
0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.9/1.8 0.75/1.5 0.75/1.5
伺服电机选型手册

SM 110-020-30 LFB 2 Nm 3000 rpm 0.6Kw SA3L04C SA3L06B SA3H10C
SM 110-040-30 LFB 4 Nm 3000 rpm 1.2Kw SA3L06B SA3L10B SA3H10C
SM 130-040-25 LFB 4 Nm 2500 rpm 1.0Kw SA3L06B SA3L10B SA3H10C
SM 130-050-25 LFB 5 Nm 2500 rpm 1.3Kw SA3L06B SA3L10B SA3H10C
SM 130-060-25 LFB 6 Nm 2500 rpm 1.5Kw SA3L06B SA3L10B SA3H10C
转矩-转速图(T—M图1图2-A(图2-B图3-A(图3-B
额定转矩(Nm 1.3 2.4 3.3
A(mm 128 150 165
B(mm 500 500 500
转矩-转速图(M-n:
图1
图2-A图2-B
图3-A图3-B注:A区间连续工作区;B区间短时工作区;图X-A为SFC配置,图X-B为SFC+配置。
4:表示驱动器软件订制标志。
伺服电机主要参数BONMET伺服驱动器型号
电机系列电机型号额定转矩额定转速额定功率SFC配置SFC+配置高压配置ห้องสมุดไป่ตู้
SM型伺服电机40系列
SM 40-001-30LFB 0.1Nm 3000rpm 0.03Kw SL10A SA3L04C SA3H10C
SM 40-002-30LFB 0.13Nm 3000rpm 0.05Kw SL10A SA3L04C SA3H10C
SGYS使用说明V5.2

3.6 驱动器外围连接......................................................................................................... 17
3.6.1 A 型结构(400W~1KW) ............................................................................................................. 17 3.6.2 B 型结构(1KW~3KW) .............................................................................................................. 18
S GYS 系列驱动器
交流伺服电机使用说明手册
精密控制
源自专业
TODE
伺服系统
SGYS 系列
目 录
第1章 型号说明 ................................................................. 1
1.1 产品型号说明 .............................................................................................................. 1
第2章
安 装....................................................................................................... 2
法那科电机尺寸
▲▲▲▲▲▲◎
▲
◎◎
40 A06B-2078-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
0:锥轴
0
1:直轴
1
* 轴类 2:直轴带键 型 3:锥轴,带抱闸
2 3
4:直轴,带抱闸
4
5:直轴带键,带抱闸
5
0:标准型
0
* 抱闸 1:带风扇 及风扇 2:高扭矩抱闸
1 2
3:高扭矩抱闸,带风扇
3
0:αiA 1000
▲▲▲▲▲▲◎
▲
◎◎
20 A06B-0077-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
40 A06B-0078-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
40 A06B-0085-Bxyz#abcd 80 A06B-0082-Bxyz#abcd 80 A06B-0087-Bxyz#abcd 80 A06B-0089-Bxyz#abcd
▲▲▲▲▲▲◎ ▲▲▲▲▲▲◎ ▲▲▲▲▲▲◎ ▲▲▲▲▲▲◎
▲
◎◎
▲
◎◎
伺 服
▲
◎◎
电
机
▲
◎◎
10 HV A06B-2062-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
10 HV A06B-2064-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
10 HV A06B-2076-Bxyz#abcd
▲▲▲▲▲▲◎
▲▲▲▲▲▲◎
机
▲
◎◎
10 HV A06B-0076-Bxyz#abcd
▲▲▲▲▲▲◎
▲
◎◎
20 HV A06B-0079-Bxyz#abcd
电机选型手册-中文
Smart & AccurateBONMET SERVO SYSTEM性能卓越● 多合一控制方式 利用参数切换可分别使用:①位置控制;②速度控制;③转矩控制;④JOG 控制;⑤点对点控制。
● 单轴定位功能SA 系列伺服驱动器内置了16节点的单轴定位功能,用户可以通过伺服驱动器的RS-232通讯接口直接与触摸屏连接,从而省却了中间的PLC 单元。
● 伺服系统分析功能博美德伺服驱动器专用计算机软件Servofly ,能对所有参数进行编辑、传送、比较以及初始化,监控所有信号、报警、系统状态等,功能强大,操作便捷。
种类齐全● 与机器匹配的伺服电机种类齐全博美德伺服电机现在拥有27种不同型号,适用面广泛,并且我们仍在不断开发新型产品。
● 多种配套类型伺服驱动器博美德伺服驱动器拥有SA 系列和SL 系列2个系列,现已涵盖0.4KW 至5.5KW 的多种类型驱动器,广泛运用于各种工业环境。
质量保证● 伺服电机选用高工作温度、高磁能积优质的永磁材料做成,使用优化的电磁参数设计,电机长期运行时仍能保持优良的工作状态,IP65的防护等级,特别适用于工业环境。
● 伺服驱动器 采用德国进口模块,专业的系统设计,先进的PID 控制算法,能与电机参数实现无缝联接,使产品性能达到最佳效果。
型号说明 BONMET SA● 适配类型 ● SM 系列伺服电机● 伺服驱动器规格● 伺服驱动器连接图● 控制软件● 伺服产品选件1:表示电机是正弦波驱动的永磁同步交流伺服电机。
2:表示电机外径,单位:mm。
3:表示电机零速转矩,其值为三位数×0.1,单位:Nm。
4:表示电机额定转速,其值为二位数×100,单位:rpm。
5:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。
6:表示反馈元件的规格,F—复合式增量编码器(2500 C/T);F1—省线式增量编码器;R—1对极旋转变压器。
7:表示电机类型,B—基本型。
ST系列伺服电机选型手册(2015.5)V3.0
目录
概述:.......................................................................................................................................................... 1
3. 17 位单圈 12 位多圈机械式绝对编码器(M1)插座(15 芯;80、90 系列通用;110、130、 150、180 系列通用)
sensor SLA May sensor SLB Maz 屏
信号 +5V 0V A+ B+ A- B-
+S5V Dat+ Clk+
S0v
Dat- Clk- 蔽
座芯 编号 2 3 4 5 7 8 10 11 12 13 14 15 1
产品特点:
1. 全封闭式结构,外形美观,结构紧凑。 2. 低谐波、低齿槽转矩、反电势正弦性好,采用正弦波电流驱动,低速特性好。 3. 采用高性能永磁材料和高牌号冷轧硅钢片,功率密度高,过载能力强。 4. 采用优化电磁设计,电磁噪声低、运行平稳、效率高,可长期保持优良工作状态。 5. 采用优化惯量设计,电机响应速度快,适合各种场合应用尤其数控机床进给驱动。 6. 整机 IP66 防护等级,电机可在-15℃~40℃环境温度和粉尘油雾环境下可靠使用。 7. 采用高速、高精度光电编码器,与高性能驱动单元配合可实现高精度的速度和位置控制。 8. 配备的航空插头可以 360 度旋转,可根据产品的使用空间自行决定航空插头的出线方向。
东元TSDAESDA系列交流伺服电机
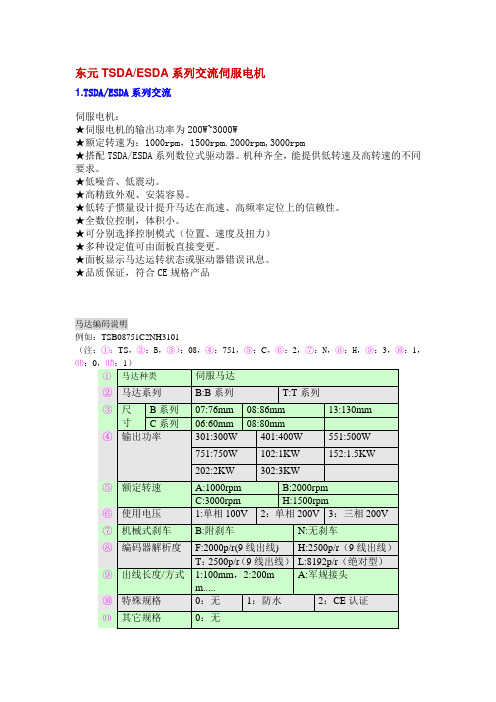
东元TSDA/ESDA系列交流伺服电机1.TSDA/ESDA系列交流伺服电机:★伺服电机的输出功率为200W~3000W★额定转速为:1000rpm,1500rpm.2000rpm,3000rpm★搭配TSDA/ESDA系列数位式驱动器。
机种齐全,能提供低转速及高转速的不同要求。
★低噪音、低震动。
★高精致外观、安装容易。
★低转子惯量设计提升马达在高速、高频率定位上的信赖性。
★全数位控制,体积小。
★可分别选择控制模式(位置、速度及扭力)★多种设定值可由面板直接变更。
★面板显示马达运转状态或驱动器错误讯息。
★品质保证,符合CE规格产品马达编码说明例如:TSB08751C2NH3101(注:①:TS,②:B,③):08,④:751,⑤:C,⑥:2,⑦:N,⑧:H,⑨:3,⑩:1,⑾:型号:TSB07301C-2NT3 TSB08751C-2NT3 TSC06201C TSC06401C TSC08751C TSB13551A-3NTA TSB13551H-3NTA TSB13102A-3NTA TSB13102B-3NTA TSB13102H-3NTA TSB13152B-3NTA TSB13202B-3NTA TSB13302B-3NTA 6CC201G-3DEBE 6CC401G-3DEBE2. TSDA系列交流伺服驱动器特点:★TSDA属于标准型驱动器★搭配伺服电机功率200W~3000W★全数位控制,体积小。
★可分别选择控制模式(位置、速度及扭力)★多种设定值可由面板直接变更。
★面板显示马达运转状态或驱动器错误讯息。
★应用在包装、电子、非标、切割、材料成型、加工设备等型号:TSDA15B TSDA20B TSDA30C TSDA50C TSDA75C东元TSDA标准型驱动器:适配电机TSDA15B (120W~300W ) TSDA20B (400W~750W)TSDA30C (750W~1000W) TSDA50C (1.5KW~2KW)TSDA75C (2KW~3KW)3. ESDA系列交流伺服驱动器特点:★搭配伺服电机功率200W~1.5KW★ESDA系列经济型伺服,是由台湾东元第一代通用伺服TSDA的升级简化版★将位置脉冲输入和模拟电压输入两种控制模式分开,驱动器的运算速度提高15%。
华兴数控SP500B DM500 ADM500全数字式交流伺服驱动器安装操作手册说明书

版本:V1.0全数字式交流伺服驱动器适用机型:SP500B/DM500/ADM500安装操作手册 全数字式交流伺服系统目录目录 (1)第一章产品概述 (3)1.1SP500B、DM500、ADM500系列交流伺服驱动器 (3)1.2SJT系列交流伺服电机 (3)第二章产品规格 (4)2.1SP500B、DM500、ADM500伺服驱动器规格 (4)2.1.1 型号说明 (4)2.1.2 规格与性能参数 (5)2.1.3 伺服驱动器安装尺寸图 (6)2.2SJT系列交流伺服电机规格 (8)2.2.1 型号说明 (8)2.2.2 规格与性能参数 (8)2.2.3 安装尺寸图 (10)2.3隔离变压器规格 (13)第三章接线 (14)3.1配线规格要求 (14)3.1.1 电源端子TB (14)3.1.2 编码器接口CN1 (14)3.1.3 控制信号接口CN2 (14)3.2标准接线 (15)3.3SP500B、DM500、DM500A系列伺服驱动器端子信号与功能 (22)3.3.1 电源端子TB (22)3.3.2 编码器接口CN1和控制信号接口CN2 (22)3.4SP500B、DM500、DM500A系列伺服驱动器信号接口电路 (31)3.4.1 开关量NPN型输入接口 (31)3.4.2 开关量单端输出接口 (32)3.4.3 开关量双端输出接口 (33)3.4.4 脉冲量输入接口 (34)3.4.5 增量式光电编码器输入接口 (35)3.4.6 位置反馈输出接口 (36)3.5SJT系列伺服电机端子信号与功能 (36)第四章操作与显示 (37)4.1键盘操作 (37)4.2参数设置(PA-) (37)4.3参数监视(D P-) (38)4.4参数管理(EE-) (39)4.5速度试运行(S R-) (40)4.6JOG点动运行(J R-) (40)第五章参数 (41)5.1参数简介 (41)5.2参数内容及意义 (43)第六章功能应用 (47)6.1基本性能参数的调试 (47)6.2伺服电机旋转方向的切换 (49)6.3电子齿轮的设置 (49)6.4启停特性的调整 (50)6.5驱动器更换配套伺服电机 (50)6.6控制方式的应用 (51)6.6.1 脉冲位置控制方式(PA3=0)与脉冲速度控制方式(PA3=4) (51)6.6.2 内部速度控制方式(PA3=1) (51)6.6.3 主轴控制方式(PA3=5) (52)6.6.4 速度/位置控制方式(PA3=6) (54)6.7使能与报警时序图 (56)6.8抱闸应用 (57)6.8.1 松闸流程 (58)6.8.2 抱闸流程 (58)第七章故障诊断 (61)7.1保护诊断功能 (61)7.2故障分析 (62)7.3驱动器故障解决 (64)第八章保养与维护 (65)第一章产品概述1.1 SP500B、DM500、ADM500系列交流伺服驱动器SP500B、DM500、ADM500系列全数字式交流伺服驱动器为本公司自主研发生产,具有集成度高、体积小、响应速度快、保护完善、可靠性高、易于安装等一系列优点。
(仅供参考)伺服电机型号说明

1、伺服电机型号说明2、伺服电机参数表●110系列伺服电机参数表EDSMT-2T110-060C 伺服电机型号 EDSMT-2T110-020A EDSMT-2T110-040A EDSMT-2T110-050A额定功率(KW)0.6 1.2 1.5 1.2 额定线电压(V)220 220 220 220 额定线电流(A) 2.5 5.0 6.0 4.5 额定转速(rpm)3000 3000 3000 2000 额定力矩(N.m) 2 4 5 6 峰值力矩(N.m) 6 12 15 12 反电势(V/1000r/min) 56 (54)(62) 83力矩系数(N.m/A) 0.8 0.8 0.83 1.33转子惯量(Kg.m2) 0.31×10-3 0.54×10-3 0.63×10-3 0.76×10-3绕组(线间)电阻(Ω) 4.02 1.09 1.03 1.46 绕组(线间)电感(mH)8.48 3.3 3.43 4.7 电气时间常数(ms) 2.1 3.0 3.33 3.2转矩—转速图(T—M)图1 图2 图3 图4伺服电机型号EDSMT-2T110-060A EDSMT-2T110-040C额定功率(KW) 1.8 0.8额定线电压(V) 220 220额定线电流(A) 6.0 3.3额定转速(rpm) 3000 2000额定力矩(N.m) 6 4峰值力矩(N.m) 18 12反电势(V/1000r/min) 60 (79)力矩系数(N.m/A) 1.0 1.2转子惯量(Kg.m2) 0.76×10-3 0.54×10-3绕组(线间)电阻(Ω) 0.81 2.41绕组(线间)电感(mH) 2.59 7.3电气时间常数(ms) 3.2 3转矩—转速图(T—M)图5 图编码器线数/(PPR) 2500F(155℃)电机绝缘等级 Class防护等级 IP65 使用环境环境温度: -20℃~ +50℃环境湿度:相对湿度<90%(不结霜条件)绕组引线 U V W PE电机绕组插座插座编号 2 3 4 1信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE编码器插座插座编号234567891011121314151●130系列伺服电机参数表EDSMT-2T130-077B 伺服电机型号 EDSMT-2T130-040B EDSMT-2T130-050B EDSMT-2T130-060B额定功率(KW) 1.0 1.3 1.5 2.0额定线电压(V)220 220 220 220额定线电流(A) 4.0 5.0 6.0 7.5额定转速(rpm)2500 2500 2500 2500额定力矩(N.m) 4 5.0 6 7.7峰值力矩(N.m)12 15 18 22反电势(V/1000r/min)(69.3)68 65 68力矩系数(N.m/A) 1.0 1.0 1.0 1.03转子惯量(Kg.m2) 0.85×10-3 1.06×10-3 1.26×10-3 1.53×10-3绕组(线间)电阻(Ω) 2.76 1.84 1.21 1.01绕组(线间)电感(mH) 6.42 4.9 3.87 2.94电气时间常数(ms) 2.89 3.19 3.26 3.80转矩—转速图(T—M)图6 图7 图8 图9EDSMT-2T130-150B 伺服电机型号 EDSMT-2T130-100D EDSMT-2T130-100B EDSMT-2T130-150D额定功率(KW) 1.5 2.6 2.3 3.8额定线电压(V)220 220 220 220额定线电流(A) 6.0 10 9.5 17额定转速(rpm)1500 2500 1500 2500额定力矩(N.m)10 10 15 15峰值力矩(N.m)25 25 30 30反电势(V/1000r/min)103 70 114 67力矩系数(N.m/A) 1.67 1.0 1.58 0.88转子惯量(Kg.m2) 1.94×10-3 1.94×10-3 2.77×10-3 2.77×10-3绕组(线间)电阻(Ω) 1.29 0.73 1.1 0.49绕组(线间)电感(mH) 5.07 2.45 4.45 1.68电气时间常数(ms) 3.93 3.64 4.45 4.02转矩—转速图(T—M)图10 图11 图12 图13编码器线数/(PPR) 2500 电机绝缘等级 Class F (155℃) 防护等级 IP65使用环境 环境温度: -20 ℃~ +50℃ 环境湿度:相对湿度<90%(不结霜条件) 绕组引线 U V W PE 电机绕组插座 插座编号 2 34 1 信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE 编码器插座插座编号234567891011121314151110/130系列伺服电机安装尺寸110系列 130系列 10 15额定转矩(N ·m)2 4 5 6 4 5 6 7.71500 2500 15002500LA 159 189 204 219 166 171 179 192 213 209 241 231 LB 55 55 55 55 57 57 57 57 57 57 LC 5 5 5 5 5 5 5 5 5 5 LD 12 12 12 12 14 14 14 14 14 14 LE 95 95 95 95 110 110 110 110 110 110 LF 110 110 110 110 130 130 130 130 130 130 LG 130 130 130 130 145 145 145 145 145 145 LZ 9 9 9 9 9 9 9 9 9 9 S 19 19 19 19 22 22 22 222222注:抱闸为8N.m;Dc99V。
伺服电机型号说明

1、伺服电机型号说明2、伺服电机参数表●110系列伺服电机参数表EDSMT-2T110-060C 伺服电机型号 EDSMT-2T110-020A EDSMT-2T110-040A EDSMT-2T110-050A额定功率(KW)0.6 1.2 1.5 1.2 额定线电压(V)220 220 220 220 额定线电流(A) 2.5 5.0 6.0 4.5 额定转速(rpm)3000 3000 3000 2000 额定力矩(N.m) 2 4 5 6 峰值力矩(N.m) 6 12 15 12 反电势(V/1000r/min) 56 (54)(62) 83力矩系数(N.m/A) 0.8 0.8 0.83 1.33转子惯量(Kg.m2) 0.31×10-3 0.54×10-3 0.63×10-3 0.76×10-3绕组(线间)电阻(Ω) 4.02 1.09 1.03 1.46 绕组(线间)电感(mH)8.48 3.3 3.43 4.7 电气时间常数(ms) 2.1 3.0 3.33 3.2转矩—转速图(T—M)图1 图2 图3 图4伺服电机型号EDSMT-2T110-060A EDSMT-2T110-040C额定功率(KW) 1.8 0.8额定线电压(V) 220 220额定线电流(A) 6.0 3.3额定转速(rpm) 3000 2000额定力矩(N.m) 6 4峰值力矩(N.m) 18 12反电势(V/1000r/min) 60 (79)力矩系数(N.m/A) 1.0 1.2转子惯量(Kg.m2) 0.76×10-3 0.54×10-3绕组(线间)电阻(Ω) 0.81 2.41绕组(线间)电感(mH) 2.59 7.3电气时间常数(ms) 3.2 3转矩—转速图(T—M)图5 图编码器线数/(PPR) 2500F(155℃)电机绝缘等级 Class防护等级 IP65 使用环境环境温度: -20℃~ +50℃环境湿度:相对湿度<90%(不结霜条件)绕组引线 U V W PE电机绕组插座插座编号 2 3 4 1信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE编码器插座插座编号234567891011121314151●130系列伺服电机参数表EDSMT-2T130-077B 伺服电机型号 EDSMT-2T130-040B EDSMT-2T130-050B EDSMT-2T130-060B额定功率(KW) 1.0 1.3 1.5 2.0额定线电压(V)220 220 220 220额定线电流(A) 4.0 5.0 6.0 7.5额定转速(rpm)2500 2500 2500 2500额定力矩(N.m) 4 5.0 6 7.7峰值力矩(N.m)12 15 18 22反电势(V/1000r/min)(69.3)68 65 68力矩系数(N.m/A) 1.0 1.0 1.0 1.03转子惯量(Kg.m2) 0.85×10-3 1.06×10-3 1.26×10-3 1.53×10-3绕组(线间)电阻(Ω) 2.76 1.84 1.21 1.01绕组(线间)电感(mH) 6.42 4.9 3.87 2.94电气时间常数(ms) 2.89 3.19 3.26 3.80转矩—转速图(T—M)图6 图7 图8 图9EDSMT-2T130-150B 伺服电机型号 EDSMT-2T130-100D EDSMT-2T130-100B EDSMT-2T130-150D额定功率(KW) 1.5 2.6 2.3 3.8额定线电压(V)220 220 220 220额定线电流(A) 6.0 10 9.5 17额定转速(rpm)1500 2500 1500 2500额定力矩(N.m)10 10 15 15峰值力矩(N.m)25 25 30 30反电势(V/1000r/min)103 70 114 67力矩系数(N.m/A) 1.67 1.0 1.58 0.88转子惯量(Kg.m2) 1.94×10-3 1.94×10-3 2.77×10-3 2.77×10-3绕组(线间)电阻(Ω) 1.29 0.73 1.1 0.49绕组(线间)电感(mH) 5.07 2.45 4.45 1.68电气时间常数(ms) 3.93 3.64 4.45 4.02转矩—转速图(T—M)图10 图11 图12 图13编码器线数/(PPR) 2500 电机绝缘等级 Class F (155℃) 防护等级 IP65使用环境 环境温度: -20 ℃~ +50℃ 环境湿度:相对湿度<90%(不结霜条件) 绕组引线 U V W PE 电机绕组插座 插座编号 2 34 1 信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE 编码器插座插座编号234567891011121314151110/130系列伺服电机安装尺寸110系列 130系列 10 15额定转矩(N ·m)2 4 5 6 4 5 6 7.71500 2500 15002500LA 159 189 204 219 166 171 179 192 213 209 241 231 LB 55 55 55 55 57 57 57 57 57 57 LC 5 5 5 5 5 5 5 5 5 5 LD 12 12 12 12 14 14 14 14 14 14 LE 95 95 95 95 110 110 110 110 110 110 LF 110 110 110 110 130 130 130 130 130 130 LG 130 130 130 130 145 145 145 145 145 145 LZ 9 9 9 9 9 9 9 9 9 9 S 19 19 19 19 22 22 22 222222注:抱闸为8N.m;Dc99V。
伺服电机规格(外发中英2009)新

3.2
1.4
0.99
2.16
0.87
0.51
0.15
0.112
0.09
28.6
14.1
11.3
18.5
8.98
5.8
2.1
1.53
1.14
增量式光电编码器(ABZ+uvw,分辨 2500 线)Incremental photoelectric encoder( ABZ+uvw, 2500 line)
parameter 转子转动惯量 Rotary inertia
线电阻 Line resistance
kg m2×10-4 Ω
0.1034 13.6
0.1814 3.2
线电感
mH
30
10.15
0.4 1.27 3.82 2.8 8.5
0.498 17.3x10-3
0.3221 2.73 11.21
60V
Protected-type Totally-enclosed, self-cooled, IP55 (excluded shaft)
Mounting type Flange mounting z 转子转动惯量不包含编码器的转动惯量。
(2) 外形图 Outside view
单位 unit:mm
L
LM
M5X12 M5X12 M5X12 M5X12 M5X12 M5X12 M8X16 M8X16 M8X16
z 带油封型号其输出轴的外形尺寸无变化,订购时请指明。 z 轴伸端尺寸可根据用户要求订制。
3、200 基座伺服电机(不带减速机)
自然冷却(Natural Convection Cooling)
rpm rpm N m/Arms kg m2×10-4 Ω mH 标准 Standard
交流伺服电机森创60CB系列电机说明书

无刷直流电机系统 电机外径范围:57 mm~92 mm 功率范围:70W~600W 转速范围:1000 rpm~8000 rpm 转矩范围:0.095 N·m~1.9 N·m 驱动器工作电压:48VDC,220VAC
机械传动单元 精密直线运动单元、行星减速器 视觉测量系统
运动控制系统 可编程控制器、运动控制板卡 系统集成与服务
网 址:www. hollysys-electric. com
南京办事处:(025) 84293632/37/52/53 深圳分公司:(0755) 26581960/61/62/63
©1006 by Hollysys Electric 06/2010 AS002
内容如有更改, 恕不另告.
制 造 商:北京和利时电机技术有限公司(原四通电机)
地 址:北京市海淀区学清路 9 号汇智大厦 A 座 10 层
通讯地址:北京 2877 信箱
邮政编码:100085
电话总机:(010) 62932100
热线分机:销售-100; 技术支持-810
销售热线:(010) 62927938
传 真:(010) 62927946
外形尺寸
[单位:mm]
60CB020C-010000
L
96
60CB040C-010000 121
60CB060C-010000 146
60CB P2
接线说明
电机编码器线说明
定义
电源+5V 输出 电源 0V GND 编码器 U+相信号输入 编码器 U-相信号输入 编码器 V+相信号输入 编码器 V-相信号输入 编码器 W+相信号输入 编码器 W-相信号输入 编码器 Z+相信号输入 编码器 Z-相信号输入 编码器 A+相信号输入 编码器 A-相信号输入 编码器 B+相信号输入 编码器 B-相信号输入
发那科FANCIαi伺服电机型号参数(精)

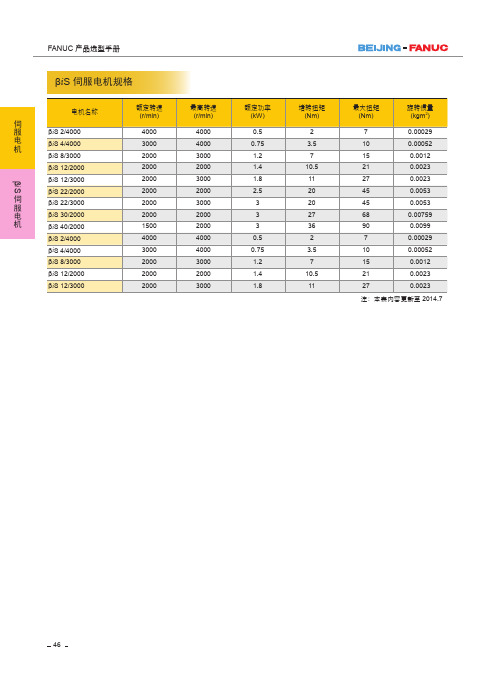
Motor ModelαiF 1/5000αiF 2/5000αiF 4/4000αiF 8/3000αiF 12/3000Rated output(kw0.50.751.41.63Stallingtorque(Nm124812Max.speed(r/min50005000500030003000Rotor intertia(kgm2 0.000310.000530.00140.00260.0062Driver(αi SV80Specification A06B-0202-Bxyz A06B-0205-Bxyz A06B-0223-Bxyz A06B-0227-Bxyz A06B-0243-BxyzMotor ModelαiF 22/3000αiF 30/3000αiF 40/3000Rated output(kw476Stallingtorque(Nm223038Max.speed(r/min300030003000Rotor intertia(kgm2 0.0120.0170.022Driver(αi SV80SpecificationA06B-0247-BxyzA06B-0253-BxyzA06B-0257-BxyzNote2:Straight shaft with key way 3:Taper shaft,with breakA06B-0257-Bxyzx :0:Taper shaft 1:Straight shaft1: with Fan (only for aiF 40 2: with High-Torque Brake *14:Straight shaft,with break5:Straight shaft with key way,with breaky :0: standardz :0:Pulsecoder aiA1000 1:Pulsecoder aiI1000 2:Pulsecoder aiA160003: with High-Torque Brake , with Fan *1 *1: "x" should be from 3 to 5αiF 伺服电机简明规格参数20401609533000αiF 40/3000i with fan0.022FANUC伺服电机按驱动电压可分为高压电机(400VHV和低压电机(200V;按产品系列可以分αi系列和βiS系列两大类;这两大系列伺服电机又依次可以分为αiF、αiS、αiF(HV、αiS(HV和βiS、βiS(HV等子类。
登奇GK6系列伺服电机

超大,超小,领先技术100W - 200KW交流永磁同步伺服电机交流感应异步伺服电机高性能伺服驱动系统GOLDEN AGE登奇简介上海登奇机电技术有限公司及武汉登奇机电技术有限公司是分别落户上海及武汉的高新科技技术企业,主要产品有 GK6系列交流伺服电机,100W-200KW/0.6Nm-2000Nm GM7系列交流伺服(主轴)电机2.2KW-100KW GZ6系列大力矩直驱伺服电机 可达240000Nm GA160 全数字交流伺服驱动系统 GA18D 全数字交流伺服驱动系统 登奇机电拥有包括整体充磁设备、高精度平衡机、气动量仪、专用测试平台等一批高、精、尖加工测试设备,已具备生产近十万台各类伺服、主轴电机及驱动装置的生产能力。
到目前为止,已有一大批产品在机床、纺织机械、印刷机械、工业机器人、塑料机械、木工机械、风力发电、港口机械、自动化流水线、自动化仓库、建筑机械、建材机械、包装、罐装机械、雷达、火炮等自动化设备中广泛应用。
并以良好的品质,迅捷周到的服务获得了广泛的好评。
企业理念从样本中您只能了解到标准伺服电机及其相关产品的信息。
如您有更多的个性化需求,请与我们联系上海登奇机电技术有限公司Email:info@ Tel: 4001 550 188Fax: 0086 21 65314028立足本土,面向全球,紧盯国际领先技术,服务全球制造业。
客户需求引导研发方向,成为客户机器的“专业”伺服系统制造商。
联系登奇电机规格代码制动器 B:带制动器 E:无制动器安装方式 1:IMB5 2:IMV1 3:IMV3 4:IMB3 6:IMB35 适配驱动器直流母线电压 2:210V 3:300V 6:600V额定转速 A:1200 r/min B:1500r/min C:2000r/min F:3000r/min …… 中心高(用中心高除以10的整数部分表示)型号说明GK6系列交流伺服电动机与相应伺服驱动装置配套后构成的相互协调的系统,可广泛应用于机床、纺织机械、塑料机械、印染机械、印刷机械、建筑机械、建材机械,港口提升运输机械,木材加工机械,人造板制造生产线,各种工业机械手,自动化流水线,自动化仓储系统,冶金机械雷达、火炮等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序号规格型号额定输出功率(W)额定转矩(N•m)额定转速(rpm)额定相电流(A)适配驱动器MS-A MS-E TS-A TS-C HS-A1 40CB010C-500000 100 0.32 3000 1.0 MS0010E2 60CB020C-500000 200 0.64 3000 1.27 MS0010AMS0020AMS0040E TS0020A22 HS0020A3 60CB040C-500000 400 1.27 3000 2.8 MS0040A MS0040E TS0040A22 HS0040A4 60CB060C-500000 600 1.91 3000 3.5 MS0075A MS0075E TS0075A22 HS0075A5 60CB020C-020000 200 0.64 3000 1.27 MS0010AMS0020AMS0040E TS0020A22 HS0020A6 60CB040C-020000 400 1.27 3000 2.50 MS0040A MS0040E TS0040A22 HS0040A7 60CB060C-200000 600 1.91 3000 3.73 MS0075A MS0075E TS0075A22 HS0075A8 60CB040C-300000 400 1.27 3000 2.8 MS0040A MS0040E TS0040A22 HS0040A9 80CB075C-500000 750 2.39 3000 4.4 MS0075A MS0075E TS0075A22 HS0075A10 80CB100C-500000 1000 3.18 3000 4.5 MS0100E TS0100A22 HS0100A11 80CB050C-200000 500 1.59 3000 3.23 MS0075A MS0040E TS0075A22 HS0075A12 80CB075C-020000 750 2.39 3000 4.78 MS0075A MS0075E TS0075A22 HS0075A13 80CB100C-200000 1000 3.18 3000 6.34 MS0100E TS0100A22 HS0100A14 90CB075C-700000 750 2.39 3000 3.58 MS0075A MS0075E TS0075A22 HS0075A15 110MB040A-001000 400 3.82 1000 2.0 MS0040A MS0075E TS0040A22 HS0040A16 110MB060D-001000 600 4.0 1500 2.6 MS0075A MS0075E TS0075A22 HS0075A17 110MB075D-001000 750 5.0 1500 3.2 MS0075A MS0075E TS0075A22 HS0075A18 110MB075B-001000 750 3.58 2000 3.2 MS0075A MS0075E TS0075A22 HS0075A19 110MB075D-501000 750 5.0 1500 4.8 MS0075A MS0075E TS0075A22 HS0075A20 110MB100B-501000 1000 5.0 2000 5.5 MS0075ETS0100A22 HS0100A 21 110MB120B-501000 1200 6.0 2000 6.0 MS0100ETS0150A32TS0150C32HS0150A 交流伺服电机规格型号一览表(220V)序号规格型号额 定输出功率(W) 额 定 转 矩(N •m)额 定转 速(rpm)额 定相电流(A)适配驱懂器MS-AMS-E TS-A TS-C HS-A 23 130MB055A-701000 550 5.25 1000 3.12 MS0075ATS0075A22HS0075A 24 130MB100A-701000 1000 9.55 1000 4.72 MS0100E TS0100A22 HS0100A25 130MB150A-701000 1500 14.32 1000 6.76TS0150A32 TS0150C32HS0150A 26 130MB100D-701000 1000 6.61500 5.0TS0100A22 HS0100A 27 130MB100B-701000 1000 4.77 2000 4.72TS0100A22HS0100A 28 130MB150B-701000 1500 7.16 2000 6.87 TS0150A32 TS0150C32HS0150A 29 130MB200B-701000 2000 9.55 2000 9.18 TS0200A32 TS0200C32HS0200A 30 130MB300B-701000 3000 14.32 2000 12.95TS0300A32 TS0300C32HS0300A 31 130MB100C-701000 1000 3.27 3000 4.96TS0100A22HS0100A 32 130MB150C-701000 1500 4.78 3000 6.41TS0150A32 TS0150C32HS0150A 33 130MB200C-701000 2000 6.5 3000 9.5 TS0200A32 TS0200C32HS0200A 34 130MB300C-701000 3000 9.55 3000 12.95TS0300A32 TS0300C32HS0300A 35 130MB100B-501000 1000 5 2000 4.5 MS0100ETS0100A22 HS0100A 36 130MB150B-501000 1500 7.7 2000 8.5 TS0200A32 TS0200C32HS0200A 37 130MB200B-501000 2000 10 2000 8.5 TS0200A32 TS0200C32HS0200A 38130MB300B-501000300015200013.5TS0300A32TS0300C32HS0300A交流伺服电机规格型号一览表(380 V )序号 规格型号额定电压 (V) 额定输出功率 (W)额 定 转 矩(N •m) 额 定 转 速(rpm)额定相电流(A)适配驱动器 1 130HMB150A-301000380 1500 15 1000 5 TS0150C33 2 130HMB300B-301000 380 3000 15 2000 8 TS0300C33 3 150HMB360B-601000 380 3600 18 2000 10.5 TS0400C33 4 150HMB380E-601000 380 3800 15 2500 11.5 TS0400C33 5 150HMB460B-601000380 4600 23 2000 13.5 TS0500C33 6150HMB540B-601000 380540027200013.5TS0600C33交流伺服电机规格型号一览表(220 V ,512线编码器)序号 规格型号 额定输出功率 (W) 额 定 转 矩 (N •m) 额 定 转 速(rpm) 额定相电流(A)适配驱动器 1 80CB055C-808000 550 1.8 3000 3 MS0040E V1.1 MS0075E V1.8 2 80CB075C-808000 750 2.4 3000 3.7MS0075E V1.8交流伺服电机规格型号一览表(48 VDC ) 序号 规格型号额定电压 (VDC) 额定输出功率 (W) 额 定 转 矩 (N •m) 额 定 转 速 (rpm) 额定相电流(A)适配驱动器1 60LCB040C-100000484001.2730006.63LS-20520A LS-40520A交流伺服驱动器规格型号一览表类 型分 类 规格型号 额定功率(W)额定电压经济型 MS-A系列MS0020A 200单相220VACMS0040A 400MS0075A 750MS-E系列MS0010E 100MS0040E 400MS0075E 750MS0100E 1000高性能型 TS-A系列TS0020A22 200单相220VACTS0040A22 400TS0075A22 750TS0100A22 1000TS0150A32 1500三相220VACTS0200A32 2000TS0300A32 3000TS-C系列TS0150C32 1500TS0200C32 2000TS0300C32 3000TS0150C33 1500三相380VACTS0200C33 2000TS0300C33 3000TS0400C33 4000TS0500C33 5000TS0600C33 6000TS0700C33 7000TS0800C33 8000TS0900C33 9000HS-A系列HS0020A 200单相220VACHS0040A 400HS0075A 750HS0100A 1000HS0150A 1500HS0200A 2000HS0250A 2500HS0300A 3000低压型 LS-A系列LS-20520A (二合一型) 40018~80VDC LS-40520A (四合一型) 400。