第二章 环境载荷计算11-28
工业与民用建筑工程地质勘察规范

工业与民用建筑工程地质勘察规范通知qRI武( 77 )建发设字第227号根据我委(73 )建革设字第239号通知,由河北省革2 命委员会基本建设委员会合同有关单位共同编制的《工业与民用建筑工程地质勘察规范们已经有关部门会审,现批准《工业与民用建筑工程地质勘察规范>>’I’J 21-77为’全国通用勘察规范,自一九七八年五月一日起试行。
本规范中关于岩石和土的分类的有些规定与《王业与民用建筑地基基础设计规范>>TJ7-74中有关规远不尽相同,凡有矛盾之处,以本规范的规定为准。
本规也只规定工业与民用建筑工程池质勘察的一般技术要求,对于各地区、各行业的特殊技术要求,请各省、市、自治区和国务院各有关部根据本规洁的规寇,结合本地区、本行业的具体情况,制订补充规寇,并报送我委备也案。
ff'4·, 本规范在试行过程中,要注意总结经验,如发现有需要修改或补充之处,请将意见和在关资料寄交我委建筑科r4告学研究院,以便今后修订时参考。
本规范由我委建筑科学研究院负责解释。
国家基本建设委员会一九匕七年八月二十日编制说明电本规范是根据国家基本建设委员会(73 )建革设字第239号文的通知,由我委会同有关省、市和国务院有关部所属勘察及高等院校等单位共同编制而成。
在编制过程中,遵循国家有关的技术经济政策,进行了多次调查研究和必要的科学试验,总结了建国二十多年来,在工程地质勘察方面的实践经验和科研成果,并广泛征求了全国有关单位的意见,反复讨论修改,最后合同有F 关部门审查定稿。
本规范共分七章二十二节和八个附录。
其主要内容有总则、岩石和土的分类及鉴定、工程地质勘祟的基本斐求、测绘勘探及测试、特殊地质条件勘察、特殊性土地基刽勘察和专门工程勘察等。
dEZ?? 河北省革命委员会基本建设委员会也一九七六年十月、主要符号A一一触探头锥底面积、振111面a_1~2公斤/厘米2) ~ 一一土的压缩系数(压力阶段为l2B-一基础底面宽度Fb一一载荷板宽度pY c一一土的内聚力;C一一土的不排水剪抗剪强度(十字板剪力试验)J uCj一一地基抗压即度系数z2Dy一一土的压实系数sDz→→一阻尼比pEa一一地基动弹性模量,E,一一士的压缩模量FEo--地基变形模量Fe-一一土的孔隙比,1m一一压模或模型基础的共振频率,1;一一压模或模型基础的固有频率,1,一一-触探头侧壁摩擦力Fe G一一地基动剪切模量zalL一一土的液性指数pJ-一一土的塑性指数Fp’K一一安全系数、滑坡稳定系数pK,g一一边坡稳定安全系数;K7'一一滑坡稳主安全系数pk 一一土的渗透系数pL一一烛探头有效侧壁;二庄、水准线路民皮(公里); 7矶。
机械基础试题库( 1~5 章)
机械基础试题库(1~5 章)一、填空题(共100 题、210 空。
绪论1~10 题、20 空;第一章11~30 题、44 空;第二章31~50 题、44 空;第三章51~80 题、61 空;第四章81~90 题、20 空;第五章91~100 题、21 空。
)1、机器是执行机械运动的装置,用来变换或传递能量、物料与信息。
2 机械是机器与机构的总称。
3、一般机器是由动力部分、传动部分和控制装置三部分组成。
4、构件是机构中的独立运动的单元体。
5、运动副是两构件直接接触组成的可动连接。
6、按两构件的接触形式的不同,运动副可分为低副和高副。
7、现代工业中主要应用的传动方式有:液压传动、机械传动、气动传动和电气传动等四种。
8、低副是指两构件以面接触的运动副,高副是指两构件以___线_____接触的运动副。
9、按两构件的相对运动形式,低副分为移动副、螺旋副、转动副。
10、齿轮的啮合属于高副。
11、摩擦轮传动通过两轮直接接触所产生的摩擦力来传递运动和动力。
12、带传动以带作为中间挠性件,利用带与带轮之间的摩擦或啮合来传递运动和动力。
13、平带传动有开口传动、交叉传动、半交叉传动和角度传动等四种形式。
14、包角是指带与带轮接触弧所对的圆心角,包角越大,带传动能力越__大_。
15、对于平带传动,一般要求包角α≥ 150 度;对于V 带传动,一般要求包角α≥ 120度。
16、V带是横截面为六角形或近似为六角形的传动带。
17、V带的工作面为,它的楔角α 一般为__40__。
18、带传动的张紧装置通常采用和两种方法。
19、V带传动中,带的线速度一般应限制在≤ V ≤ 范围内。
20、平带的开口传动用于两带轮轴线,且两带轮转向的场合。
21、平带的交叉传动用于两带轮轴线,且两带轮转向的场合。
22、普通V带分为Y、Z、A、B、C、D、E七种型号。
23、普通V中Y型截面积最,而E型最。
24、平带的张紧轮应放在边的侧,并靠近带轮。
25、V带的张紧轮应放在边的侧,并靠近带轮。
溢洪道设计规范SDJ

说明第一章总则第二章溢洪道布置第三章水力设计第四章建筑物结构设计第五章地基震边坡处理第六章观测设计附录一水力设计计算公式附录二高速水流区的防空蚀设计附录三载荷计算附录四常用参数表附录五水力观测设计打印刷新溢洪道设计规范说明本规范在我国系首次制订,在编制过程中进行了广泛地调查研究,认真总结了我国溢洪道工程的实践经验、试验研究和原型观测成果,同时也借鉴了国外已有的研究成果和实践经验。
本规范编制组由中南勘测设计院、北京勘测设计院和陕西省水利水电勘测设计院等三个单位组成,中南勘测设计院为主编单位。
参加本规范编写的主要人员有:中南勘测设计院——陈其煊、李诚、邓正湖、席与光北京勘测设计院——吴季宏陕西省水利水电勘测设计院——曹国兰第一章总则第1.0.1条本规范使用范围以河岸式溢洪道的设计为主,兼顾厂顶溢流、厂前挑流及泄洪隧洞出口的水力设计。
第1.0.2条本规范适用于大、中型水利水电工程中岩基上的1、2、3级溢洪道的设计,4、5级溢洪道的设计可参照使用。
对于特殊重要的工程,应进行专门研究,制定补充条例。
第1.0.3条设计河岸式溢洪道时、应符合《水利水电枢纽工程等级划分及设计标准(山区、丘陵区部分)》(SDJ12—78)及其它标准和规范的有关规定。
厂顶溢流、厂前挑流及泄洪隧洞出口的水力设计,还应符合《水电站厂房设计规范》(SD335—89)、《水工隧洞设计规范》(SD134—84)的有关规定。
第1.0.4条泄洪建筑物的洪水标准:一、泄洪的设计及校核洪水标准应根据枢纽的等级,按照《水利水电枢纽工程等级划分及设计标准(山区、丘陵区部分)》(SDJ12—78)及其补充规定的有关条文执行。
二、消能防冲的设计洪水标准:一级建筑物按百年一遇洪水设计;二级建筑物按50年一遇洪水设计;三级建筑物按30年一遇洪水设计。
同时,还应考虑低于消能防冲设计洪水标准时可能出现的不利情况,保证工程安全和正常运行。
应视需要采用超过消能防冲设计标准的洪水进行校核,此时消能防冲建筑物允许出现局部破坏,但不得危及大坝及其它主要建筑物的安全或长期影响枢纽运行,并易于修复。
天津理工大学机械设计总复习
总复习第1、2、3章1、静载荷——大小方向不随时间变化或变化很小的载荷2、变载荷——随时间作周期性或非周期性变化的载荷3、设计计算中涉及名义载荷和计算载荷 ∴ 计算载荷(Fc 、Pc 、Tc)=载荷系数×名义载荷4、在变应力下,零件的主要失效形式为:疲劳破坏。
5、静应力只能由静载荷产生,变应力可能由变载荷或静载荷产生。
6、疲劳极限——在循环特性一定的变应力作用下经过N 次循环作用而不发生疲劳破坏的最大应力称为疲劳极限 (σrN 或τrN) 7、疲劳曲线——循环次数N 与疲劳极限σrN 或τrN 之间的关系曲线 作业3-1某材料的对称持久疲劳极限σ-1 = 180 Mpa,循环基数N0 = 107,m=9,试求循环次数分别为6000,35000,730000次时的有限寿命疲劳极限。
解:100-==σσσmrmrNNN NN1. 410.45Mpa180*6000109710===-σσmrN NN 2. 337.41Mpa180*35000109710===-σσmrN NN 3. 240.75Mpa180*730000109710===-σσmrNNN第6章螺纹联接1、在常用的螺旋传动中,传动效率最高的螺纹是_____(4)_____。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹2、在常用的螺纹联接中,自锁性能最好的螺纹是____(1)______。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹3、在常用的螺纹联接中,用于联接的螺纹是____(1)______。
(1)三角形螺纹(2)梯形螺纹(3)锯齿形螺纹(4)矩形螺纹4、承受预紧力F′的紧螺栓联接在受工作拉力F时,剩余预紧力为F″,其螺栓所受的总拉力F0为_____(2)_____。
(1)'+=FFF0(2)"+=FFF(3)"'=FFF+5、为了保证联接的紧密性和刚性,F”>06螺纹联接防松的根本问题在于___(3)__。
第二章_地上管道
近端直跨
24EI x 24EI D g x q 2 q 10 l 0.8 x3 Dg 1 6 24 EI 2 l 5x 7 x 2 3 q 10 x
4
不允许反坡
2.水平(横向)载荷——风载荷
TW 1.3KK Z w0 D l
载荷系数 基本风压值(又称标准风 风载体型系数,架 压值),取决于管架所在 空管道风载体型系 地点,它是指空旷地区 数,见表2-2 10m高处30年一遇的10 分钟最大平均风压值 风压高度变化系数, N/m2 ,见表11-1 见表11-2
σ=1.22×10-5×197.5×109×100=240.95(MPa)
管子对油罐的推力:P= σ A=522.86(KN)
将进出油管在罐前的固定点由1点改至2点
• 角形平面管道;
• 管系有大的变形能力;
• 管道的热应力和对油
罐的推力大为降低。
平面管系热应力的计算 • 弹性中心法(力法)——分析法 • 图解法——查设计手册
对于拐弯或附近设有支管的固定管架,尚有拐弯管 或支管传来的侧向水平推力。 对于拐弯或附近设有支管的活动管架,其管架顶尚 有因管道横向位移引起的横向摩擦力。
3.轴向载荷 • 管道的轴向摩擦力 • 管道内压引起的不平衡轴向力 • 补偿器的反弹力 –为了适应管道热膨胀的要求,在架空管道中 多设有补偿器,一般设置在两个固定管架之 间,当管道受热膨胀时,补偿器被压缩变形, 由于补偿器的刚度,将产生一个抵抗压缩的 力量。
2-2 架空管道的载荷计算
• 除管道输送介质的内压外,架空管道上还作用有 多种形式的载荷。 • 载荷计算 –垂直载荷 –水平载荷
环境载荷
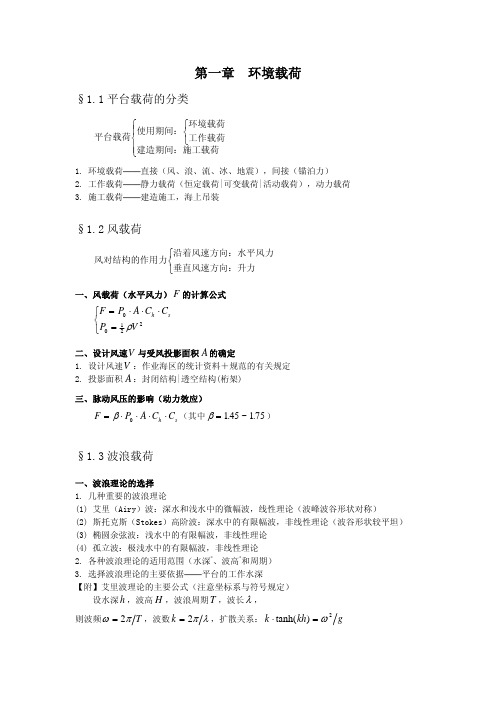
第一章 环境载荷§1.1平台载荷的分类平台载荷使用期间:环境载荷工作载荷建造期间:施工载荷⎧⎨⎩⎧⎨⎪⎩⎪1. 环境载荷——直接(风、浪、流、冰、地震),间接(锚泊力)2. 工作载荷——静力载荷(恒定载荷|可变载荷|活动载荷),动力载荷3. 施工载荷——建造施工,海上吊装§1.2风载荷风对结构的作用力沿着风速方向:水平风力垂直风速方向:升力⎧⎨⎩一、风载荷(水平风力)的计算公式F F P A C C P V h s =⋅⋅⋅=⎧⎨⎩00122ρ 二、设计风速V 与受风投影面积的确定A 1. 设计风速V :作业海区的统计资料+规范的有关规定2. 投影面积:封闭结构|透空结构(桁架)A 三、脉动风压的影响(动力效应)F P A C h =⋅⋅C s ⋅⋅β0(其中β=145175.~.)§1.3波浪载荷一、波浪理论的选择1. 几种重要的波浪理论(1) 艾里(Airy)波:深水和浅水中的微幅波,线性理论(波峰波谷形状对称)(2) 斯托克斯(Stokes)高阶波:深水中的有限幅波,非线性理论(波谷形状较平坦)(3) 椭圆余弦波:浅水中的有限幅波,非线性理论(4) 孤立波:极浅水中的有限幅波,非线性理论2. 各种波浪理论的适用范围(水深*、波高*和周期)3. 选择波浪理论的主要依据——平台的工作水深【附】艾里波理论的主要公式(注意坐标系与符号规定)设水深,波高h H ,波浪周期T ,波长λ, 则波频ωπ=2T ,波数k =2πλ,扩散关系:k kh ⋅=tanh()ω2g(1) 速度势:φωω(,,,)cosh[()]cosh()sin()x y z t gH k h z kh kx t =⋅+⋅−2 (2) 波面升高:ζ∂φ∂ω(,,)cos()x y t g t H kx t z =−=−=120 (3) 水质点的速度和加速度 速度:u x w z ==⎧⎨⎪⎪⎩⎪⎪∂φ∂∂φ∂; 加速度:&&u u t w w t ==⎧⎨⎪⎪⎩⎪⎪∂∂∂∂ (4) 脉动压力p x y z t t g g t H k h z kh kx t k h z kh w w (,,,)cosh[()]cosh()cos()cosh[()]cosh()=−=≡−=⋅+⋅−=⋅+⎧⎨⎪⎪⎩⎪⎪ρ∂φ∂ρζζ∂φ∂ωζ2 二、波浪载荷计算概述1. 波浪(诱导)载荷的成分波浪载荷:拖曳力─起因于物体对水流的扰动,粘性效应惯性力─起因于入射波压力力和流体的惯性附加质量力绕射力─起因于物体对水流的扰动,绕射效应()(F -K ⎧⎨⎪⎩⎪)2. 海洋结构物按尺度的划分小尺度构件特征尺寸与波长之比大尺度构件特征尺寸与波长之比─以拖曳力和惯性力为主,莫里森公式─以绕射力和惯性力为主,势流理论(.)(.)D D λλ≤>⎧⎨⎪⎩⎪0202三、应用莫里森公式计算小尺度构件的载荷1. 莫里森(Morison)公式计算垂直构件轴线方向的单位长度波浪力r f(1) 原始形式:固定垂直立柱的单位长度波浪力 r r r r r r r r f C A u u C Vu C A u u Vu C VuD M D =+=++1212ρρρρρ&&m & (拖曳力+惯性力)(2) 一般形式:计及结构运动(刚体运动和弹性变形)的任意方向构件的单位长度波浪力 r r r r r f C Au u V uC VD r r N n m R =++12ρρρ&&u r (拖曳力+F-K 力+附加质量力)2. 无因次的拖曳力系数C 和惯性力系数D C M(1) 拖曳力系数取决于:物体截面形状、表面粗糙度、雷诺数等,通常依赖试验测定C D (2) 惯性力系数:一般可按势流理论计算或试验确定C M =+1C m 四、应用势流理论计算大尺度构件的载荷1. 绕射问题总速度势φφφ(,,,)(,,,)(,,,)x y z t x y z t x y z t W D =+ 定解问题:绕射势φD x y z t (,,,)满足绕射势流体域内的连续性方程各部分边界条件[][],[],[],[]L F B S R ⎧⎨⎩⇒φD⇒总速度势φφφ=+W D ⇒脉动压力p t=−ρ∂φ∂⇒力和矩r r r r r F pnds m r pnds S o S ==×⎧⎨⎪⎩⎪∫∫∫∫ 2. 计算方法(1) 理论方法解析法:仅适合于圆柱体数值方法(三维分布源法):适合于一般形状的大型物体⎧⎨⎩(2) 半理论半经验方法——F-K 法波浪力 F c F K =⋅【例】应用F-K 法计算长方形潜体上的水平波浪力和矩§1.4流和冰载荷一、海流载荷1. 考虑定常海流对结构物作用的通常做法(1) 浪、流联合作用:在莫里森公式中取r r ru u u W C =+ (2) 流的单独作用:r r r f C A u D C =12ρu C 2. 流速沿深度的变化u C z 二、冰载荷1. 冰载荷的成分冰载荷:移动冰原的挤压力流冰的撞击力其它⎧⎨⎪⎩⎪2. 冰原对垂直桩柱的最大挤压力P 的计算冰原的最大挤压力P : 有效接触面积冰所能承受的单位面积最大挤压力m k bh k R C ⋅⋅⋅⎧⎨⎩⎫⎬⎭21⇒P mk k R bh C =123. 流冰对桩柱的最大撞击力P 和最大切入深度X 的计算功能关系ΔE W =:流冰动能减少桩柱切入冰块做功冰压力ΔE BLh v W p x dx PX p x mk R bh mk R hx X C C =====⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪∫12201112()()()tan ρα ⇒X v BL mk R P vh BL mk R C C ==⋅⎧⎨⎪⎩⎪ραρα2211tan tan (可取=2.5,1k ρ=0.9t m 3)。
04波浪载荷
l1 , m1 , n1
22 为x轴在OXYZ中的方向余弦
3.3.4群桩效应
由于群桩按排或列布置,在平台设计中,应考虑群桩的掩护作用和相 互干扰作用。作用在一个构件上的波浪力,将受到与之靠近的另一个 构件尾流场的影响。前面构件尾流的旋涡可能激发后面构件的动态响 应,使其波浪力增加,这即是群桩效应。 当桩距/桩直径小于4时,应该考虑群桩效应。 根据模型试验和现场观测,群桩的掩护和干扰作用主要和桩距I 和桩径D之比有关。一般认为当桩距/桩直径大于4时时,桩的掩护作 用和干扰作用可不予考虑;当桩距/桩直径小于4时,应将波浪载荷乘 以群桩系数 K 。其值应尽量由实验确定,或者查阅有关资料。
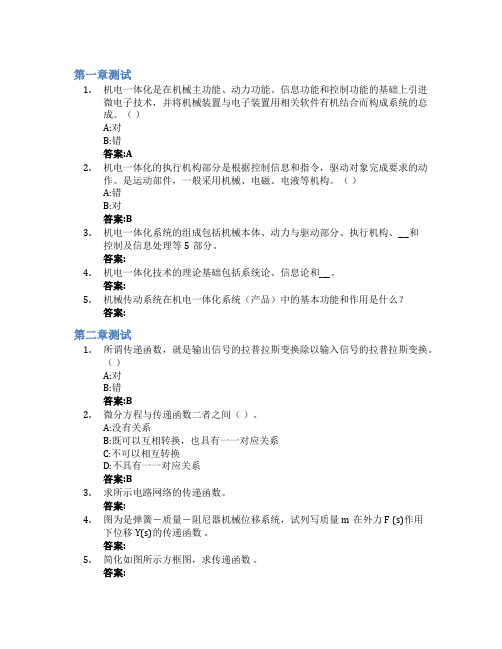
司托克斯五阶 破碎界限
艾 里 波
H-波高 d-静水面下高度 T-波浪周期
椭
浅水波
深水波
3
(1)设计波高: 根据平台所在位置及附近海域 长期实测资料(要求不少于一年),推算不同 重现期的设计波高。我国《海上移动平台入级 与建造规范》规定的设计波高的选取方法:
H d Min(H max , H b )
23
3.3.5 海生物附着对波浪力的影响
海洋桩基平台在使用期间,桩上会附着各类海生 物,这样会增大桩柱的阻力系数值 C D ,增大波浪拖 曳力。据国外资料提供的数据,在海生物附着显著 的海域,波浪拖曳力增大 20-40%;同时由于海生物 附着,加大了桩柱的直径,也必然加大了波浪惯性 力。为此,规范中规定:在海生物附着范围内,莫 里森公式中惯性力项的桩径D应按实际直径计算, 并将波浪拖曳力乘以相应系数n。n值可根据海生物 附着程度的不同确定。
S ( )
3 2
A
e 5
B
4
(米 2 秒)
蛙式打夯机设计

××××学院毕业设计(论文)说明书题目蛙式打夯机设计学生系别机电工程系专业班级机械设计制造及其自动化学号指导教师××××学院毕业设计(论文)任务书设计(论文)题目:蛙式打夯机设计系:机电系专业:机械制造班级:学号:学生:指导教师:接受任务时间2007年3月5日教研室主任(签名)系主任(签名)1.毕业设计(论文)的主要内容及基本要求(1)基本设计参数:打击次数:100次/分,打击力:约600N(2)主要内容及基本形式按给定的蛙式打夯机主要技术参数,进行设计计算。
确定蛙式打夯机重要构尺寸和主要零件尺寸,完成总体布置设计和总装配图;拆画主要零件的零件图,并编制其中一个零件的加工工艺和工装。
编写设计说明书。
2.指定查阅的主要参考文献及说明《机构设计》曹唯庆主编机械工业出版社《机械系统设计》朱龙根主编机械工业出版社《机械工程设计手册》机械工业出版社3.进度安排摘要蛙式打夯机的工作原理是通过带传动,夯机体在偏心块离心力的作用下做上下冲击振动,从而压实物料。
同时,离心力的作用也使得机体自行前移。
本文完成了蛙式打夯机的设计,具体包括对偏心块、轴、带轮、夯头架的结构设计,并对机器上主要构件(如轴、各主要连接螺栓)进行了强度校核计算。
本文设计的蛙式打夯机结构小巧,装拆方便,在进行小面积薄铺层的平整和初步压实加工的过程中,能发挥较大的作用。
最终完成了蛙式打夯机总装配图和主要零部件的零件图的设计,并完成了输出大带轮和心轴的加工工艺及工装的设计,绘制了专用夹具图。
关键词:蛙式打夯机,离心力,结构设计。
ABSTRACTThe working principle of breaststroke ramming machine (BRM) is that through the belt transmission, the body of BRM vibrates up and down functioned by the eccentric centrifugal force to compact material. Simultaneously the eccentric centrifugal force is able to make the body of BRM move forward voluntarily.In the paper, the design tasks of the BRM include the structure design of eccentric, axis, belt wheel and ramming head. Strength of the major components such as shaft, connecting bolts is calibrated in the thesis. The BRM designed in the paper has features of compact structure and convenience for the assembling and dismantling, so it can play an important role to smooth the small area thin layer and to do the preliminary compaction process.Finally, an assembling drawing of the BRM and the major part drawings are completed and the technological process of large output pulley and its fixture are designed, tooKeywords:Ramming Breaststroke Machine, Centrifugal Force, Structure Design.目录中文摘要 (Ⅰ)英文摘要 (Ⅱ)第1章绪论 (1)1.1 蛙式打夯机的发展现状 (1)1.2 本设计的设计目的 (1)1.3 本设计中的蛙式打夯机结构简图 (2)第二章电机功率的确定 (3)2.1 确定偏心块质量和工作功率 (3)2.1.1 确定偏心块质量 (3)2.1.2 确定电机所需功率 (4)第三章确定V带型号和带轮直径 (5)3.1 确定V带选用类型 (5)3.1.1 V带尺寸的确定 (5)3.2 带疲劳强度及寿命校核 (5)3.2.1 带的工作应力计算 (5)3.2.2 带的寿命计算 (7)3.3 计算一级带轮直径及所受载荷 (7)直径并确定带根数 (7)3.3.1 计算带轮D23.3.2 求轴上载荷 (8)3.3.3 带轮结构 (8)3.4 计算二级带轮直径及轴上载荷 (10)3.4.1 计算带轮D3、D直径并计算载荷 (10)43.4.2 求轴上载荷 (10)3.4.3 带轮结构 (11)第四章轴的设计 (13)4.1 带轮4上轴的设计 (13)4.1.1 初步确定轴的尺寸 (13)4.1.2 带轮4上轴的整体设计 (13)4.1.3 轴的受力校核 (14)4.2 带轮3上轴的设计 (16)4.2.1 初步确定轴的尺寸 (16)4.2.2 轴的受力校核 (17)第五章键的选择与校核 (20)5.1 带轮1上键的选择与校核 (20)5.1.1 键的选择 (20)5.1.2 键的校核 (20)5.2 带轮2上键的选择与校核 (21)5.2.1 键的选择 (21)5.2.2 键的校核 (21)5.3 带轮3上键的选择与校核 (22)5.3.1 键的选择 (22)5.3.2 键的校核 (22)5.4 带轮4上键的选择与校核 (23)5.4.1 键的选择 (23)5.4.2 键的校核 (23)第六章紧固螺栓的强度校核 (24)6.1 轮4上轴承座与夯头连接螺栓的强度校核 (24)6.2 偏心块与轮4连接螺栓的强度校核 (24)6.3 离心力大小对整机设计的检验 (25)6.3.1 检验整机前移时离心力的大小 (25)6.3.2 检验夯头抬升及底板部分抬升时离心力的大小 (25)6.4 两轴间连架杆的压杆稳定性校核 (25)6.5 轴1上轴承使用寿命校核 ................................................................. 26-1第七章带轮加工工艺设计.. (27)7.1 零件的分析 (27)7.1.1 零件的作用 (27)7.1.2 零件的工艺分析 (27)7.2 工艺规程的设计 (27)7.2.1 基准的选择 (27)7.2.2 制定工艺路线 (27)7.2.3 机械加工余量、工序尺寸及毛坯尺寸的确定 (28)7.3 确定切削用量及基本工时 (28)7.4 专用夹具的设计 (36)第8章设计总结 (39)参考文献 (41)致谢 (42)绪论1.1 蛙式打夯机的发展现状轻型压实设备蛙式打夯机是一种简易压实施工机械,市场拥有量巨大,但工作效率很低,而且安全性较差,一般只能进行小面积薄铺层的平整和初步压实工作。
第二章 环境载荷计算11-28
§2.2
风载荷
由于风压与风速的平方成正比,故风速的取值显得特别重要。从风速 的原始记录资料来看,风速具有很大的脉动性,在一天的风速记录中出现 的某—瞬间的最大风速,称为该天的瞬间风速。如果取出连续10min的风 速求其平均值,叫做10min时距的平均风速。 在海洋平台设计中常用的是两种设计风速, 持续风风速 阵风风速 持续风风速 —— 一般是几分钟(例如1-3min)时距的平均风速; 阵风风速 —— 是几秒钟(例如3s)时距的平均风速。 一般当作用在平台上的波浪力是最大波浪力,则同时作用在平台上的 风力按持续风风速计算,如果仅仅阵风的作用比持续风加波浪的作用更为 不利时,则应以阵风风速计算。不同时距的风速之间有一定的关系,时距 短的风速比时距长的风速要大。
§2.1 平台承受的载荷的分类
三、施工载荷
施工载荷指平台在建造以及海上吊运、安装过程中所承受的载荷,这 些载荷会使一些构件产生瞬时的高应力。 因此,尽管这些载荷不是结构设计的控制载荷,通常也需校核这些载 荷对平台结构所产生的影响。 对于使用载荷和施工载荷的计算,有关的平台结构规范都有明确的规 定,且各国规范的规定也日趋一致。环境载荷是平台结构设计的控制载荷 ,由于受到环境条件等因素的影响,计算比较复杂,下面主要介绍环境载 荷的计算。
§2.2 风载荷
作用在海洋平台结构上的风载荷可根据下式计算: F = pA (2-1) (2-1)式中,p 为受风构件表面上的风压,N/m2;A为构件垂直于风向的 轮廓投影面积,m2 ;F为作用在构件上的风力,N。 计算风压p 时通常是以根据一定的标准高度和形状选定的基本风压值 p0为基础,然后再对风压沿高度的变化和受风构件形状作修正。基本风压 值p0可由下式确定:
海洋平台强度分析
第二章 环境载荷计算
机电一体化与过程控制智慧树知到答案章节测试2023年华南农业大学
第一章测试1.机电一体化是在机械主功能、动力功能、信息功能和控制功能的基础上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成系统的总成。
()A:对B:错答案:A2.机电一体化的执行机构部分是根据控制信息和指令,驱动对象完成要求的动作。
是运动部件,一般采用机械、电磁、电液等机构。
()A:错B:对答案:B3.机电一体化系统的组成包括机械本体、动力与驱动部分、执行机构、___和控制及信息处理等5部分。
答案:4.机电一体化技术的理论基础包括系统论、信息论和___。
答案:5.机械传动系统在机电一体化系统(产品)中的基本功能和作用是什么?答案:第二章测试1.所谓传递函数,就是输出信号的拉普拉斯变换除以输入信号的拉普拉斯变换。
()A:对B:错答案:B2.微分方程与传递函数二者之间()。
A:没有关系B:既可以互相转换,也具有一一对应关系C:不可以相互转换D:不具有一一对应关系答案:B3.求所示电路网络的传递函数。
答案:4.图为是弹簧-质量-阻尼器机械位移系统,试列写质量m在外力F (s)作用下位移Y(s)的传递函数。
答案:5.简化如图所示方框图,求传递函数。
答案:第三章测试1.传感器一般由三部分组成,其中包括()。
A:敏感元件B:传感器的接口C:软件技术D:转换元件E:测量电路答案:ADE2.下列传感器的特性指标中属于静态特性的是()。
A:重复性B:动态灵敏度C:频率响应D:过渡时间答案:A3.电感式传感器是将非电量转换为线圈()的变化的一种装置。
A:漏感B:自感和互感C:自感D:互感答案:B4.涡流传感器根据()可分为高频反射式和低频透射式两大类。
A:激励电流的大小B:激励频率高低C:激励是直流还是交流D:激励电压的大小答案:B5.差动变压器式电感传感器是把被测位移量转换成()的变化装置,通过这一转换从而获得相应的电压输出。
A:RC调谐振荡B:线圈自感C:LC调谐振荡D:线圈互感答案:D6.变面积型电容式传感器大多用来检测()。
风力发电机齿轮增速箱毕业设计
摘要风电产业的飞速发展促成了风电装备制造业的繁荣,风电齿轮箱作为风电机组的核心部件,倍受国内外风电相关行业和研究机构的关注。
但由于国内风电齿轮箱的研究起步较晚,技术薄弱,特别是兆瓦级风电齿轮箱,主要依靠引进国外技术。
因此,急需对兆瓦级风电齿轮箱进行自主开发研究,真正掌握风电齿轮箱设计制造技术,以实现风机国产化目标。
本文设计的是兆瓦级风力发电机组的齿轮箱,通过方案的选取,齿轮参数计算等对其配套的齿轮箱进行自主设计。
1)根据风电齿轮箱承受载荷的复杂性,对其载荷情况进行了分析研究,确定齿轮箱的机械结构。
选取两级行星派生型传动方案,在此基础上进行传动比分配与各级传动参数如模数,齿数,螺旋角等的确定;通过计算,确定各级传动的齿轮参数;选择适当的齿轮。
2)对行星齿轮传动进行受力分析,得出各级齿轮载荷结果。
依据标准进行静强度校核,结果符合安全要求。
3)绘制CAD装配图,并确定恰当合理参数。
关键词:风电齿轮箱;风力发电;结构设计。
ABSTRACTThe rapid development of wind power industry lead to the prosperity of wind power equipment manufacturing industry.As the core component of wind turbine,the gearbox is received much concern from related industries and research institution both at home and abroad.However, due to the domestic research of gearbox for wind turbine starts late,technology is weak,especially in the gearbox for MW wind turbine,which mainly relied on the introduction of foreign technology.Therefore,it is urgent need to carry out independent development and research on MW wind power gearbox,and truly master the design and manufacturing technology in order to achieve the goal of localization.1)The load Cases of gearbox for wind turbines ale analyzed,and the interrelation of loading cycle numbers under different torque levels is deduced according to the curve of materials’fatigue.the mechanical structure of gearbox is determined.The two-stage derivation planetary transmission scheme is selected.The gear parameters of every stage transmission is calculated.,and the force analysis results is obtained.2)the static strength check of tooth surface contact is implemented according to related standard.The result shows that it is accord with safety requirements.3)Draw CAD drawings, and determine appropriate reasonable parameters.KEYWORDS:Gearbox for Wind Turbine;the wind power;Structure Design.目录第一章前言错误!未定义书签。
水工建筑物的荷载计算
水工建筑物的荷载计算水工建筑物上的作用有:重力、水作用、渗透作用力、风及波浪作用、冰及冰冻作用、温度、土及泥沙作用、地震作用等。
一、自重W=V γ一般素砼取23.5~24kN/m 3,钢筋砼取24.5~25kN/m 3,浆砌石取21.5~23kN/m 3,对土石坝的材料重度应根据具体性能及不同部位,分别取湿重度、干重度、饱和重度、浮重度等几种情况计算。
水工建筑物上永久固定设备,如闸门、启闭机等,其自重标准值采用设备标牌重量 作用分项系数:大体积混凝土、土石坝取1.0;对普通水工混凝土、金属结构(设备)取1.05,当自重对结构有利时取0.95。
地下工程的混凝土衬砌取1.1,其对结构有利时取0.9。
二、水压力水体对各种水工结构均发生作用,作用结果是对结构产生水压力,其可分为静水压力和动水压力。
1.静水压力水体静止状态下对某结构表面的作用力称为静水压力(1)作用在坝、闸等结构面上的水压力P H =221H w γ P V =w w V γ(2)管道及地下结构上的水压力计算。
内水压力:作用在管道内壁上的静水压力; 外水压力:作用于管道或衬砌外侧的水压力。
对内水压力,为计算方便,常将其分解成均匀内水压力和非均匀内水压力两部分。
h p w wr γ=')cos 1(''θγ-=i w wr r p对有压隧洞的砼衬砌的外水压强标准值可按式(2-6)计算。
e e ek H p ωγβ= (2-6)式中:ek p ——作用于衬砌上的外水压强标准值(KN/m 2);e β——外水压力折减系数,可按表2-1采用;e H ——作用水头(m),按设计采用的地下水位线与隧洞中心线的高差确定。
同内水压力一样,外水压力也可分解成均匀外水压力和非均匀外水压力。
非均匀外水压力的合力方向垂直向上,合力的大小应等于单位洞长排开水体的重量。
2.动水压力(1)渐变流时的时均压强:θρcos gh p w tr =式中:tr p ——过流面上计算点的时均压强代表值(N/m 2);w ρ——水的密度(kg/m 3); g ——重力加速度(m/s 2);h ——计算点A 的水深(m);θ——结构物底面与平面的夹角。
海洋平台设计原理_第二章_海洋环境载荷
2016/11
第二章 海洋环境载荷
30
上海交通大学本科生课程
2.3 波浪与波浪载荷
• 常见波浪理论D 孤
立波理论
• 孤立波是椭圆余弦
波在水深极浅时的 极限。
2016/11
第二章 海洋环境载荷
31
上海交通大学本科生课程
2.3 波浪与波浪载荷
• 波浪理论适用范围:
– 黄色区域适用线性 波理论;
– 蓝色虚线框为各阶 Stokes波理论适用 范围;
40
上海交通大学本科生课程
2.4 海流与海流载荷
• 如果不考虑波浪,海流对于结构物的拖曳
力为:
• Fdrag = 0.5 *Rhowater* Cdrag * v2 * A; • Cdrag是拖曳力系数,v为海流流速,A为投影
面积;
• 如果考虑波浪,则将上式中v换成海流速度
+波浪速度。
2016/11
• 我国海洋水文专家提出,以海面上10m处,
30年一遇,10min平均最大风速为一般条件, 1min平均最大风速为极端条件。
2016/11
第二章 海洋环境载荷
15
上海交通大学本科生课程
2.2 风与风载荷
2016/11
第二章 海洋环境载荷
16
上海交通大学本科生课程
2.2 风与风载荷
• DNV规定了两种设计风速标准。
海洋平台设计原理
主讲人:何炎平 倪崇本
上海交通大学船舶海洋与建筑工程学院 二〇一六年·十一月
上海交通大学本科生课程
第二章 海洋环境载荷
• 参考书目《Dynamics of Offshore
Structure》伦敦大学学院 Minoo H.Patel 著。
风力发电机组设计与制造学习资料
第一章、绪论1、风力发电机组的组成风力发电机组可分为风轮、机舱、塔架和基础几个部分;1风轮由叶片和轮毂组成;叶片具有空气动力外形,在气流作用下产生力矩驱动风轮转动,通过轮毂将扭矩输入到主传动系统;2机舱由底盘、导流罩和机舱罩组成,底盘上安装除主控制器以外的主要部件;机舱罩后部的上方装有风速和风向传感器,舱壁上有隔音和通风装置等,机舱底部与塔架连接;3塔架支撑风轮与机舱达到所需要的高度;塔架上安置发电机与主控制器之间的动力电缆、控制和通信电缆,还装有供操作人员上下机舱的扶梯,大型机组还设有升降机;4基础为钢筋混凝土结构,根据当地地质情况设计成不同的形式;基础中心预置有于塔架连接的基础部件,以保证将风力发电机组牢牢固定在基础上;基础周围还设置预防雷击的接地装置;2、变桨距、变速型的风力发电机组内部结构1变桨距系统:设在轮毂之中,对于电动变距系统来说,包括变距电动机、变距减速器、变距轴承、变距控制器和备用电源等;2发电系统:包括发电机、变流器等;3主传动系统:包括主轴及主轴承、齿轮箱、高速轴和联轴器等;4偏航系统:由偏航电动机、偏航减速器、偏航轴承、制动机构等组成;5控制与安全系统:包括传感器、电气设备、计算机控制与安全系统含相应软件和控制欲安全系统执行机构等;此外,还设有液压系统,为高速轴上设置的制动装置、偏航制动装置提供液压动力;液压系统包括液压站、输油管和执行机构;为了实现齿轮箱、发电机、变流器的温度控制,设有循环油冷却系统、风扇和加热器;3、风力发电机组的分类:1按功率大小:a微型~1kw;b小型1~100kw;c中型100~1000kw;d大型1000kw以上;2按风轮轴方向:a水平轴风力发电机组随风轮与塔架相对位置的不同而有上风向与下风向之分;风轮在塔架的前面迎风旋转,叫做上风向风力发电机组;风轮安装在塔架后面,风先经过塔架,再到风轮,则称为下风向风力发电机组;上风向风力发电机组必须有某种调向装置来保持风轮迎风,而下风向风力发电机组则能够自动对准风向,从而免去了调向装置;对于下风向风力发电机组,由于一部分空气通过塔架后再吹向风轮,这样塔架就干扰了流过叶片的气流而形成塔影效应,增加了风轮旋转过程中叶片载荷的复杂性,降低了风力发电机组的出力和其他性能;b垂直轴风力发电机组;3按功率调节方式:a定桨距风力发电机组;b变桨距调节风力发电机组;c主动失速调节风力发电机组;4按传动形式:a高传动比齿轮箱型;b直接驱动型;c中传动比齿轮箱型半直驱;5按发电机转速变化:a定速恒速;b多态定速;c变速;4、设计依据风力发电机组的设计依据是风力发电机组的设计任务书,一般包括基本形式、基本参数和外部条件;1基本形式:目前的主流机型是水平轴、上风向、三叶片、变桨距、变速恒频风电机组; 2基本参数:风力发电机组的基本参数主要是指风力发电机组的额定功率、转速范围、总效率、设计寿命和生产成本等;3外部条件:风力发电机组的外部条件包括运行环境条件、电网条件和风场地质情况;运行环境条件主要是风资源、湍流和阵风情况、气候情况等;5、设计内容设计内容包括风力发电机组设计图样和相关的设计文件;设计图样包括外观图、部件图和零件图;设计文件包括设计计算说明书、运输和安装说明书、用户使用和维护手册等;1外观图:风力发电机组的外观图描述了其整体结构并标注了主要尺寸,同时用文字注明了设备的技术特征,如机组类型、功率调节方式、风轮旋转方向、额定功率、额定风速、风轮直径、风轮转速范围、风轮倾角、风轮圆锥角、变距最大角度、齿轮箱类型、齿轮箱增速比、发电机类型、塔架类型、轮毂中心高和各主要部件质量;2部件图:部件图是各层次安装工作的指导图样,表示各零件之间的装配关系、配合公差、轮廓尺寸、装配技术条件和标题栏等;3零件图:零件图是生产零件的依据,包括零件的结构和形状、尺寸、表面粗糙度和几何公差、材料及表面处理技术要求、技术条件、标题栏等;设计零件时,要进行相应的载荷分析和强度校核;4设计文件:设计文件是与设计相关的规范性文件,详细描述了机组设计、制造、装配、运行维护过程的理念、标准、理论依据、方法和技术要求,用于设计部门存档、指导装配和安装、指导用户作业和指导维修人员的维修作业;6、设计原则可靠性、经济性与社会效益、先进性、工艺性和易维修性、标准化;7、设计步骤1方案设计概念设计:确定风力发电机组的主要参数、整体布局和结构形式;对机组的整体载荷及整机质量进行初步计算,选择主要部件的结构,完成机舱布局的计算机设计模型;同时给定控制策略;在此基础上撰写方案设计说明书;2技术设计初步设计:根据方案设计资料,进行整机和部件结构设计和确定技术要求;进行机组载荷计算和分析;对关键零部件进行校核计算和分析;进行电气控制与安全系统设计;初步选择外购件的型号;在此基础上提供技术设计图样和技术设计说明书;3施工设计详细设计:根据技术设计结果,进行载荷计算,对零部件进行强度和刚度校核及失效分析,对关键零部件进行优化设计;对整机进行可靠性分析和动态分析;修改和审定加工图样和技术文件,填写标准件和外购件明细表,撰写设计计算说明书、运输和安装说明书以及用户使用和维修手册;第二章、风力发电机组机械设计基础1、风力发电机组等级由风速和湍流参数决定,分级的目的在于最大限度的利用风能,风速和湍流参数代表了相应风电机组安装场地的类型;注:1、表中所示参数值对应于轮毂高度;2、V ref表示10min平均参考风速;A表示高湍流特性等级;B表示中湍流特性等级;C表示低湍流特性等级;I ref表示风速为15m/s时湍流强度的期望值;2、风况分为:正常风况风力机正常运行期间频繁出现的风况条件和极端风况1年一遇或50年一遇的风况条件;参考风速:50年一遇在轮毂高度处持续10min阵风;3、风况条件是由平均恒流与确定阵风或湍流结合而成;4、每种类型的外部条件又可分为正常外部条件和极端外部条件;5、湍流:风速矢量相对于10min平均值的随机变化;在使用湍流模型时应考虑风速、风向和风切边变化的影响;6、湍流风速矢量的三个分量;纵向沿着平均风速方向横向水平并且与纵向垂直的方向竖向与纵向和侧向均垂直的方向7、正常风廓线模型NWP:风廓线vz是地表以上平均风速对垂直高度z的函数;Vz=VhubZ/Zhub的a次方;8、极端风况:用于确定风力发电机组的极端风载荷,这些风况包括由暴风及风速和风向的迅速变化造成的风速峰值;9、极端风速模型EWM:极端风速模型可能为稳定的或波动的风模型;风速模型应该基于参考风速Vref和确定的湍流标准差σ1,σ1=Iref+b;b=s,σ1=;10、其他环境条件:热、光、腐蚀、机械、电或其他物理作用、温度、湿度、空气密度、阳光辐射、雨、冰雹、雪和冰、活学活性物质、雷电、地震、盐雾;11、正常环境:温度-30~+150,湿度<=95%,阳光辐射强度1000W/m2;12、电网条件:1电压标称值+10%2频率标称值+2%3三相电压不平衡度,电压负序分量的比率不超过2%4适合的自动重合周期5断电,假定电网一年内断电20次,一次断电6小时为正常条件,断电一周为极端条件;13、设计工况:分为运行工况启动发电关机和临时性工况运输吊装维护14、设计工况:发电、发电兼有故障、起动、正常关机、紧急关机、停机、停机兼有故障、运输装配维护和修复;15、DLC设计载荷状态 ECD方向变化的极端连续阵风模型 EDC极端风向变化模型EOG极端运行阵风模型EWM极端风速模型EWS极端风切变模型ETM极端湍流模型NTM正常湍流模型NWP正常风廓线模型F疲劳性载荷分析U极限强度分析N正常A非正常 T运输和安装Vmaint维修保养风速;16、局部安全系数:由于载荷和材料的不确定性和易变性,分析方法的不确定性以及零件的重要性,在设计中一定要有必要的安全储备;17、载荷局部安全系数:载荷特征值出现不利偏差的可能性或不确定性;载荷模型的不确定性;18、材料局部安全系数:材料特征值出现不利偏差的可能性或不确定性;零件截面抗力或结构承载能力评估不确定的可能性;几何参数不确定性;结构材料性能与试验样品所测性能之间的差别;换算误差;19、失效影响安全系数用来区分以下几类零件:1一类零件:失效安全结构件结构件失效后不会引起风力发电机组重要零件的失效2二类零件:非失效安全结构件3三类零件:非失效安全机械件把驱动机构和制动机构与主结构连接起来,以执行风力发电机组无冗余的保护功能;20、风力发电机组极限状态分析内容:极限强度分析;疲劳失效分析;稳定性分析;临界挠度分析;21、稳定性分析:在设计载荷作用下,非失效安全的承载件不应发生屈曲;对于其他零件在设计载荷下,允许发生弹性变形;在特征载荷下,任何零件都不应发生屈曲;第三章、总体设计总体参数是涉及到风力发电机组总结结构和功能的基本参数,主要包括额定功率、发电机额定转速、总效率、设计寿命、年发电量、发电成本、总重量、重心;1、额定功率是正常工作条件下,风力发电机组的设计要达到的最大连续输出电功率;2、设计寿命:风电机组安全等级I到Ⅲ的设计寿命至少为20年;3、额定风速是锋利发电机组达到额定功率输出时规定的风速;10~15m/s;切入风速是风力发电机组开始发电时,轮毂高度处的最低风速;3~4m/s;切出风速是风力发电机组达到设计功率时,轮毂高度处的最高风速;25m/s攻角不变,半径r处的叶素弦长与风轮转速Ω的平方成反比;变桨距攻角改变,反比于转速;4、叶片质量正比于外壳厚度与弦长的乘积,因此它随转速而正比增加;5、转速增加导致叶片重量增加、成本增加,同时转速增加导致叶片平面外的疲劳弯矩减小,机舱和塔架成本减少;6、风力发电机组产生的气动噪声正比于叶尖速度的5次方;陆基叶尖速限制在65m/s,海上74m/s;7、比功率:风力发电机组额定功率与风轮的扫掠面积的比值;405W/m平方;风电机组的总体布局包括整机各部件、各系统、附件和设备等布置;8、总体布置原则:保证风力发电机组的强度、刚度、抗振性、平衡和稳定性,支撑部件要力求有足够的刚度;整机各部件、各系统、附件和设备等,要考虑布置得合理、协调、紧凑;保证正常工作和便于维护,并考虑有较合理的重心位置;传统系统力求简短,达到结构紧凑、体积小、重量轻;9、相似设计:根据研究出来的性能良好、运行可靠地模型来设计与模型相似的新风力机;10、风力机相似是指风轮与气体的能量传递过程以及气体在风力机内流动过程相似,他们在任一对应点的同名物理量之比保持常数,这些常数叫相似常数;11、相似条件:几何相似、运动相似、动力相似;12、几何相似:模型与原型风力机的几何形状相同,对应的线性长度比为一定值;13、运动相似:空气流经几何相似的模型与原型机时,其对应点的速度方向相同、比例保持常数;14、动力相似:满足几何相似、运动相似的模型与原型机上,作用于对应点力的方向相同,大小之比应保持常数;15、Re为雷诺数,表示作用于流体上的惯性力与黏性力之比16、对于具有相同叶尖速比的相似模型和原型机,他们的效率也相等;17、模型试验中,雷诺数的值比临界雷诺数高,相似性依旧成立;相反相似性差;18、风电机组成本排序:叶片、塔架、齿轮箱、机舱、电网联接、发电机;第四章、风轮与叶片设计风轮的作用是把风的动能转换成风轮的旋转机械能;风轮的输出功率与风轮扫掠面积或风轮直径的平方、风速的立方和风能利用系数成正比;第一节、概述一、叶片的基本概念1、叶片长度:叶片径向方向上的最大长度;2、叶片面积:叶片旋转平面上的投影面积;3、叶片弦长:叶片径向各剖面翼型的弦长;4、叶片扭角:叶片各剖面弦线和风轮旋转平面的夹角;二、风轮的几何参数1、叶片数:风轮的叶片数取决于风轮尖速比;2、风轮直径:风轮在旋转平面上的投影圆的直径;3、轮毂高度:风轮旋转中心到基础平面的垂直距离;4、风轮扫掠面积:风轮在旋转平面上的投影面积;5、风轮锥角:叶片相对于和旋转轴垂直的平面的倾斜角;其作用是在风轮运行状态下减少离心力引起的叶片弯曲应力和防止叶尖与塔架碰撞的机会;6、风轮仰角:风轮的旋转轴线和水平面的夹角;其作用是避免叶尖和塔架的碰撞;7、风轮偏航角:风轮旋转轴线和风向在水平面上投影的夹角;偏航角可以起到调速和限速的作用,但在大型风力发电机组中一般不采用这种方式;8、风轮实度:叶片在风轮旋转平面上投影面积的总和与风轮扫掠面积的比值;实度大小与尖速比成反比;三、风轮的物理特性1、风轮转速;2、风轮叶尖速比公式;3、风轮轴功率公式;第二节、风轮载荷设计计算一、叶片受力示意图升力,阻力系数公式;翼型的选择:对于低速风轮,由于叶片数较多,不需要特殊的翼型升阻比;对于高速风轮,由于叶片数较少,应当选用在很宽的风速范围内具有较高升阻比和平稳失速特性的翼型,对粗糙度不敏感,以便获得较高的功率系数;另外要求翼型的气动噪声低;二、叶片载荷1、静载荷1最大受力:50年一遇的最大阵风作为最大静载荷值;2最大弯矩:当重力和气动力在同一方向上;3最大扭矩:当最大阵风时;2、动载荷1由阵风频谱的变化引起的受力变化;2风剪切影响引起的叶片动载荷;3偏航过程引起的叶片上作用力的变化;4弯曲力矩变化,由于自重及升力产生的弯曲变形;5在最大转速下,机械、空气动力制动,风轮制动的情况下;6电网周期性变化;三、叶片的受力分析离心力、风压力、气动力矩、陀螺力矩;四、风轮的强度校核1、在载荷下运转时叶片强度的计算;2、无载荷运转时叶片轴强度的计算;3、叶片停转时叶片轴强度的计算;第三节、叶片气动设计一、风力机的性能指标风轮输出功率、风能利用系数、尖速比、推力系数;相关公式二、风力机的空气动力学设计动量理论、叶素理论;三、叶片结构设计与制造一轻型结构叶片的优缺点:优点:1、在变距时驱动质量小,在很小的叶片机构动力下产生很高的调节速度;2、减少风力发电机组总质量;3、风轮的机械制动力矩小;4、周期振动弯矩由于自重减轻而很小;5、减少了材料成本;6、运费减少;7、便于安装;缺点:1、要求叶片结构必须可靠,制造费用高;2、所用材料成本高;3、风轮在阵风时反应灵敏,因此,要求功率调节也要快;4、材料特性和载荷计算必须很准确,以免超载;二叶片材料用于制造叶片的主要材料有玻璃纤维增强塑料GRP、碳纤维增强塑料CFRP、木材、钢和铝等;目前叶片多为玻璃纤维增强复合材料GRP,基体材料为聚酯树脂或环氧树脂;环氧树脂比聚酯树脂强度高,材料疲劳特性好,且收缩变形小;聚酯材料较便宜,它在固化时收缩大,在叶片的连接处可能存在潜在的危险,即由于收缩变形在金属材料与玻璃钢材料之间可能产生裂纹;复合材料的优点:可设计性强、易成型性好、耐腐蚀性强、维护少,易修补;缺点:耐热性差;抗剪切强度低;存在老化问题;生产时安全防护;表面强度低;可以燃烧;GRP材料的风力发电机组叶片成形工艺有手工湿法成形、真空辅助注胶成形和手工预浸布铺层等;三叶片主体结构叶片截面类型:实心截面、空心截面、空心薄壁复合截面等;蒙皮:提供叶片的气动外形,同时承担部分弯曲载荷与大部分剪切载荷;蒙皮的层状结构包括胶衣层、玻纤毡增强层、强度层;主梁:承载叶片的大部分弯曲载荷,是主要的承力结构;四铺层设计原则1、均衡对称原则;2、定向原则;3、按照内力方向的取向原则;4、顺序原则;5、抗局部屈曲设计原则;6、最小比例原则;7、变厚度设计原则;8、冲击载荷区设计原则;五叶根结构形式1、螺纹件预埋式:连接最可靠,但每个螺纹件的定位必须准确;2、钻孔组装式:优点:不需要贵重且质量大的法兰盘;在批量生产中只有一个力传递元件;由于采用预紧螺栓,疲劳可靠性很好;通过螺栓很好的机械联接,法兰不需要粘接;缺点:需要很高的组装精度;在现场安装,要求可靠的螺栓预紧;六功率调节方法1、失速控制优点:叶片和轮毂之间无运动部件,轮毂结构简单,费用低;没有功率调节系统的维护费用;在失速后功率的波动相对较小;缺点:气动制动系统可靠性设计和制造要求高;叶片、机舱和塔架上的动态载荷高;由于常需要制动过程,在叶片和传动系统中产生很高的机械载荷;起动性差;机组承受的风载荷大;在低空气密度地区难以达到额定功率;2、变浆距控制优点:起动性好;刹车机构简单,叶片顺浆后风轮转速可以逐渐下降;额定点以后的输出功率平滑;风轮叶根承受的静、动载荷小;缺点:由于有叶片变距机构,轮毂较复杂,可靠性设计要求高,维护费用高;功率调节系统复杂,费用高;七防雷击保护雷击造成叶片损坏的机理:一方面,雷电击中叶尖后,释放大量能量,使叶尖结构内部的温度急剧升高,引起气体高温膨胀,压力上升,造成叶尖结构爆裂破坏,严重时使整个叶片开裂;另一方面,雷击造成的巨大声波对叶片结构造成冲击损坏;八降噪措施①提高制造精度,降低表面粗糙度;②修正轮齿缘;在制造齿轮时,在齿轮顶侧沿齿宽修成直线或均匀曲线;③改用斜齿轮;④改进齿轮参数;减小v、d,选取互为质数的传动比;⑤齿轮的阻尼处理;高阻尼、不淬火;⑥改进润滑方式;第四节、轮毂设计一、风轮轮毂的结构设计轮毂是连接叶片与主轴的重要部件,作用是传递风轮的力和力矩到后面的机械结构中去;通常轮毂的形状为三通形或三角形;常用的轮毂形式有:1刚性轮毂;2柔性轮毂铰链式轮毂,叶片在挥舞方向、摆振方向和扭转方向上都可以自由活动;由于铰链式轮毂具有活动部件,相对于刚性轮毂来说,制造成本高,可靠性相对较低,维护费用高;它与刚性轮毂相比所说力与力矩较小;二、风轮轮毂的载荷分析轮毂载荷的分析方法:最大剪切法、ASME锅炉和压力容器规则法、变形能法;第五章、传动与控制机构设计1、传动与控制机构:传动机械能所需传动机构和机组控制调节所需驱动机构2、主传动链:风轮轴功率传递到发电机系统所需机构;典型的主传动链包括风轮主轴系统、增速传动机构齿轮箱、轴系的支撑与连接轴承、联轴器和制动装置;设计要求:载荷传递路径最短,结构紧凑,机械传动系统与承载轴承部件集成;主要构件支撑方式:由独立轴承支撑主轴,三点支撑式主轴,主轴集成到齿轮箱,轴承集成在机舱底盘,固定主轴支撑风轮;3、主轴轴承:径向与轴向支撑通常采用滚动轴承,易产生弯曲变形;轴承计算包括静态和动态额定值、轴承寿命分析等;4、主轴:仅考虑主轴传递扭矩的初步结构设计计算,考虑综合载荷作用的主轴强度计算;5、轴系连接构件:高速轴与发电机轴采用柔性联轴器,以弥补安装误差、解决不对中问题;需考虑对机组安全保护功能;可降低成本;还需考虑完备的绝缘措施;轴与齿轮键连接平键、花键;6、主传动链齿轮:采用大传动比齿轮传动装置,将风轮所产生转矩传递到发电机,使其得到相应转速;基本特点:大传动比,大功率,难以确定动态载荷;常年运行在极端环境下,高空维修困难;设法见效其结构和重量;设置刹车装置,配合风轮气动制动;在满足可靠性和工作寿命要求前提下,以最小体积和重量为目标,获得优化的传动方案;7、齿轮箱:箱体,传动机构,支撑构件,润滑系统,其他附件;传动形式:定轴,行星齿轮以及组合传动;级数:单级,多级;布置形式:展开式,分流式,同轴式;风电齿轮箱:多级齿轮传动,采用一级或两级行星齿轮与定轴齿轮组成的混合轮系;8、轮系:由若干对啮合齿轮组成的传动机构,以满足复杂的工程要求;定轴:所有齿轮几何轴线位置固定,分为平面和空间定轴轮系,尽可能使传动级数少;星系轮系:至少有一个齿轮的轴线可绕其他齿轮轴线转动,传动效率高,承载能力强,结构简单工艺性好;9、设计载荷:分析过程要参照相应设计标准;最重要载荷参数是反映风轮输出转矩及其相应特性的载荷谱;制动载荷:风轮制动主要依靠气动制动功能,制动时间比机械制动时间短,机械制动多用于紧急情况;10、齿轮箱结构设计:内部构件尺寸+运行环境确定外部载荷准确信息;一般传动系统设计标准给出工况系数KA;;结构设计:初步确定总体结构参数,箱体结构设计,齿轮与轴的结构设计,构建连接;11、传动效率与噪声:散热是紧凑结构齿轮箱的关键,定轴轮系每级损失2%,行星轮1%,机组传动载荷小时效率会有明显下降;12、润滑油:减少摩擦,较高承载,防止胶合,降震,防疲劳点蚀,冷却防腐蚀;润滑系统:强制润滑,设置基本回路以及对润滑油加热冷却的回路;润滑方式有飞溅润滑和强制润滑;润滑油换油周期:开始,500h;运行过程,5000~10000h;定期抽样检测;半年检修;对齿轮箱重新进行检测;13、关机运动方程:空气动力矩,机械制动力矩,发电机电磁力矩;空气制动:定桨距由叶尖扰流器实现,变桨距由顺桨实现;机械制动:多置于高速轴;限制条件离心应力,摩擦速度,摩擦片温升,制动盘温升14、变桨距系统:起动,功率调节,主传动链制动;运动方程:空气动力矩,重力矩,摩擦力矩;15、电机驱动机构:驱动功率计算,电动机选择,变距轴承齿轮副传动比,减速箱基本参数;电机外壳的防护等级:IP--;电机外壳的防护GB/。
飞行器结构设计第二章新
三、动力载荷综合设计
叠 加 抑 制
四、静动载荷综合设计
卫星、弹头载荷的综合设计
2.6 使用载荷和设计载荷、安全系数
一、什么是“使用载荷” 使用载荷——正常使用状态下,在飞行器或其部件上可能承 受的最大载荷,又称限制载荷(Limit Load)。
注:由设计情况导出的最严重情况下的使用载荷。
N尾 0
M尾 0
五、导弹、火箭的动载荷
自学2.4节。
2.5 飞行器载荷综合设计
一、什么是“载荷综合设计”
原因:飞行器在各种工作环境中某一时刻可能同时会受到静力、动 力和热载荷源的联合作用。各种载荷之间有时有抑制作用,有时某 种载荷对其他载荷又会有激励作用。
载荷综合
内力综合
二、静力载荷综合设计
稳态载荷 热载荷 瞬态载荷 电载荷 磁载荷 物理载荷
2.2 过载系数
一、过载系数的三种定义
过载系数(Overload Coefficient),简称过载。
——为什么引入过载?
定义一:
飞行器所承受的全部表面力的合力与飞行器的瞬时质量在地面上的 称重之比。
F F n
i
i
mg0
G0
要点: 1. 过载是矢量,根据坐标轴的方向决、定正负。 2. 若将飞行器简化为质点,上式给出质心处过载。
三、 “破坏载荷法”——设计方法 设计载荷法或破坏(极限)载荷法——核心思想:飞行器的强 度按设计载荷计算,在设计载荷作用下结构不能破坏。 目的:保证结构在任何情况下可靠承载,具有足够的强度。
Pu Pdes [ ]b d ,max
对比——许用应力法: 在使用载荷下飞行器及其部件不允许产生妨碍正 常工作的永久变形,即
海洋平台结构与强度 第4章 自升式海洋平台强度分析_1

自存工况
海洋平台结构与强度,2014秋季,苑博文
第四章 自升式平台强度分析
19
【CCS】 海上移动平台入级与建造规范(2005) 4.2.2 设计载荷
4.2.2.2 正常作业工况: (1) 静载荷包括平台重量、所有固定装置、供 应品和压载重量以及作业载荷; (2) 环境载荷取操作手册中正常作业允许的最 大风、波浪、海流要素或载荷以及海床支承力。
4.2.2.5 自存工况: (1) 静载荷为适应自存状态的平台重量、固定 装置、供应品和压载重量等; (2) 环境载荷取操作手册中规定的平台自存时 的最大风暴条件。
海洋平台结构与强度,2014秋季,苑博文
第四章 自升式平台强度分析
20
(1)平台的结构理想化
• 整个平台理想化为空间刚架 • 船体:板架处理 ;有时候也处理为箱型梁 (梁元)或平面板架(梁元)或空间薄壁结 构(板膜元) • 桩腿(圆柱壳桁架型):相当杆件(梁元) • 边界:桩体上端与船体刚性连接,下端为铰 支或弹性支承
海洋平台结构与强度,2014秋季,苑博文
第四章 自升式平台强度分析
16
自升式平台强度校核内容
• 原则:根据不同工况下平台的受力特点, 选取总体和局部结构(船体、桩腿及固桩 区)在最不利的工况下进行强度校核
海洋平台结构与强度,2014秋季,苑博文
第四章 自升式平台强度分析
17
• 在自升式平台的强度计算中除了考虑上述 不同的工作状态外,同时还要考虑环境条 件和甲板载荷的不同情况 • 如在着底状态中有满载风暴工况和满载作 业工况。由于前者条件更为严重,一般就 以这个工况作为设计工况 • 拖航状态也有满载拖航和轻载拖航 • 在设计工况的选取中对甲板变动载荷和环 境条件要考虑可能出现的最不利的情况组 合,以保证结构的安全性。
iacs散货船和油船共同规范介绍

IACS 散货船结构共同规范培训
IMO 公约
IMO 66载重线公约和 88 议定书 干舷船长,甲板,舱壁甲板, 上层 建筑, 首楼, 甲板室, 等. SOLAS(II-1,B,B-1,XII) 防撞舱壁,尾尖舱,机舱舱壁, 尾轴管, 开孔, 双层底,球首高, 舱室,永久检验 通道。
IACS 散货船结构共同规范培训
第10章 – 船体舾装
舵和操纵布置(UR S4)、舷墙和栏杆(ILLC)、设备(UR A1)
第11章 – 建造和试验
建造(IACS Rec.No.47)、焊接(船级社规范)、舱室试验(URS14)
第12章 – 附加标志
GRAB标志(与 SOLAS XII Reg. 6.5.3.1有关)
第13章 – 营运船舶换新衡准
不适用于矿砂船和兼装船
IACS 散货船结构共同规范培训
适用范围(2)
统一的船级符号(URS25)
L>150m的散货船
For bulk carriers designed to carry dry bulk cargoes of cargo density 1.0 t/m3 and above with specified holds empty at maximum draught in addition to BC-B conditions For bulk carriers designed to carry dry bulk cargoes of cargo density 1.0 t/m3 and above with all cargo holds in addition to BC-C conditions
第1章 – 总则
第1节 - 适用范围 第2节 - 符合验证 第3节 - 功能要求 第4节 - 符号和定义 DSS BC & SSS BC L > 90m
卷扬机的传动装置设计

成绩:_______《机械产品设计》项目设计说明书设计题目:卷扬机的传动装置设计专业班级:机制2011—07班学生姓名:xxx学号:xxxxxxxxx指导教师:xxx目录第一章、机械设计课程设计任务书 (2)第二章、电动机的选择 (4)第三章、分配传动比 (6)第四章、齿轮设计 (9)4.1高速级直齿圆柱齿轮传动的设计计算 (8)4.2低速级直齿园柱齿轮传动的设计计算 (12)第五章、轴的设计、滚动轴承选择、键连接和联轴器选择 (18)5.1轴的设计 (18)5.2、滚动轴承的选择及计算 (25)5.3、键连接的选择及校核计算 (28)第六章、附件设计 (29)第七章、设计小结 (31)第八章、参考资料 (33)第一章 《机械产品设计》任务书一、设计题目:电动卷扬机的传动装置设计1.机器的功能要求:起升机构是使重物作升降运动的机构,它是任何起重机必不可少和最主要最基本的机构。
此次设计的电动5吨卷扬机是由电动机、连轴器、制动器、减速器、卷筒、导向滑轮、起升滑轮组、钓钩等组成,其各方面的机构分布可以参考如下图所示。
电动机正转或反转时,制动器松开,通过带制动轮的联轴器带动减速器高速轴,经减速器减速后由低速轴带动卷筒旋转,使钢丝绳在卷筒上绕进或放出,从而使重物起升或下降。
电动机停止转动时,依靠制动器将高速轴的制动轮刹住,使悬吊的重物停止在空中。
根据需要起升机构上还可装设各种辅助装置,如起重量限制器、起升高度限位器、速度限制器和钢丝绳作多层卷绕时,使钢丝绳顺序排列在卷筒上的排绳装置等。
2.机器工作条件: 间隙工作,每班工作时间不超过15%,每次工作时间不超过10min ,满载启动,工作中有中等振动,两班制工作,钢绳的速度允许误差±5% 。
小批量生产,设计寿命为10年。
3.工作装置功能参数:刚绳的拉力F= 10KN ,速度V=0.8m/s ,卷筒的直径D=260mm 。
二、设计任务传动装置卷扬机原动机w联轴器重物1.设计工作内容《机械产品设计》课程设计内容由理论分析与设计计算、图样技术设计和技术文件编制三部分组成。
浅谈海洋环境下常见载荷的计算
海洋环境下的载荷可分为环境载荷、 工作载荷 和特殊 载菏 。 环 境载荷 是 由于直接 或 间接 的 自然环境 作用 而 发生 的 、 作用 在结 构 物 上 的 载 荷 。 由于 直 接 的 自然 环境作用而发生的载荷有 : 风载荷 、 波浪载荷、 海流
境栽荷的设计标准, 是按 照所处海域 中可能遇到的最恶劣的环境条件 , 并参考 中国船级社《 海 上 固定平 台入 级 与建 造规 范》 的规 定 来确 定 的 。对 于研 究工 作 载荷 , 也是 根 据 平 台的 不 同状
态, 根据 静 载荷 、 载荷 的不 同状 态 , 各 个工 况下选取 最危 险 的状 态进行 分析研 究。 动 在 关 键词 : 海 洋环 境 1 载荷计 算与载 荷组 合 力 学分析 环境 载荷 载荷 系数
F = ・Cs・S ・Po
式中:0 尸 为基本风压 ; s为受风构件的正投彰面 积 ; 为暴 露 在 风 中 构件 的高 度 系 数 , 值 可 根据 c 其 构件高度 ; c 为风载荷形状 系数 , 圆柱体取 0 5 对 .,
对于建筑物侧壁取 15 对 于两个构件顺风 向处于 。, 前后位 置 时遮 蔽效应 应 当予 以考 虑。
(/ ) 波高水深比( / )可以将 常用 的波浪理论 dL 、 Hd 的使用范围做如下划分 : 艾 里波 理 论 一 采 用 正 弦 波形 , 对 微 幅 波适 仅 用, 可用线性理论 , 计算 比较简单 。 用范 围相对水 使 深 d L >0 2 相 对波 高 H d 0 2的情况 。 / 。, / . 斯托克斯高阶波理论 一 采用坦克波形 , 不能用 线性理 论 , 而用 限 幅波 的非线 性理 论 。 它使用 范 围较
天津航海 2 1 年第 1 01 期
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§2.2 风载荷
作用在海洋平台结构上的风载荷可根据下式计算:
F = pA
(2-1)
(2-1)式中,p 为受风构件表面上的风压,N/m2;A为构件垂直于风向的 轮廓投影面积,m2 ;F为作用在构件上的风力,N。
计算风压p 时通常是以根据一定的标准高度和形状选定的基本风压值
p0为基础,然后再对风压沿高度的变化和受风构件形状作修正。基本风压
的形状系数。
§2.2 风载荷
由于风压与风速的平方成正比,故风速的取值显得特别重要。从风速 的原始记录资料来看,风速具有很大的脉动性,在一天的风速记录中出现 的某—瞬间的最大风速,称为该天的瞬间风速。如果取出连续10min的风 速求其平均值,叫做10min时距的平均风速。
在海洋平台设计中常用的是两种设计风速, 持续风风速 阵风风速
海洋平台强度分析
第二章 环境载荷计算
§2.1 平台承受的载荷的分类
海洋平台在建造和使用期间所承受的载荷可分为三类
环境载荷 使用载荷 施工载荷
一、环境载荷
指由风、波浪、海流、海冰、水温及气温、潮汐、地震等自然环境引 起的载荷,主要有风载荷、波浪载荷、流冰载荷、地震载荷等。
这些载荷可根据平台设计环境条件进行计算,在计算时通常取设计风 速和设计波浪的重现期不小于50年。图2-1为作用在不同钻井装置上的经 简化的环境载荷示意图 (仅表示了风、浪、流三种力)。
§2.2 风载荷
在缺少现场实测资料,也无邻近陆、海气象台站的资料时,可利用表 2-1所列的系数进行不同时距风速的转换。此表是以1h平均风速为基准的 ,应用此表时可用线性插值求得所需要的系数。各种统计资料表明,1h平 均风速的大小对表中系数值的影响极小。
表2-1 不同时距平均风速与1h平均风速的比例系数
持续风风速 —— 一般是几分钟(例如1-3min)时距的平均风速; 阵风风速 —— 是几秒钟(例如3s)时距的平均风速。 一般当作用在平台上的波浪力是最大波浪力,则同时作用在平台上的
风力按持续风风速计算,如果仅仅阵风的作用比持续风加波浪的作用更为 不利时,则应以阵风风速计算。不同时距的风速之间有一定的关系,时距 短的风速比时距长的风速要大。
分为可变载荷和动力载荷。 可变载荷的数值或作用位置变化缓慢,可作为静载荷处理,例如可移动 的钻井设备重量,存放的套管及器材重量,人员及其生活必需品的重量等。 动力载荷为对平台结构动力作用明显的载荷,例如各种动力机械和设备 运转时引起的周期性载荷,平台钻井起、下钻作业、吊机起重、船舶停靠及 直升飞机降落等引起的冲击载荷。对于动力载荷应考虑其动力放大作用。
时距
1h
10min 1min
15s
5s
3s
系数值 1.00
1.04
1.16
1.26
1.32
1.35
§2.2 风载荷
基本风压的标准高度为海面上10m,所以设计风速一般取海面上10m高处的风 速。其它高度处的风速可用下式换算:
(2-5)
1
vs
z 10
n
v10
式中:vs为离海面高度为z(m)的风速;v10为离海面10m高处的风速。
1.60
152.5~167.5
1.63
167.5~183.0
1.67
183.0~198.0
1.70
198.0~213.5
1.72
213.5~228.5
1.75
228.5~244.0
1.77
244.0~256.0
1.79
256以上
1.80
§2.2 风载荷
系数Cs严格来说是构件形状、构件表面粗糙度及雷诺数的函数,为便 于工程应用,一般都根据构件的形状定出Cs值,如表2-3所示。
因此,式(2-4)中的CH可表示为
(2-6)
2
CH
z 10
n
式中的n值与测量风速的时距以及离岸的距离有关,一般在7~13之间变化。
§2.2 风载荷
美国API规范建议,在开敞的海域,对于持续风风速n等于8,对于阵 风风速n等于13。CCS、ABS、LR的移动平台规范则取表2-2所列的CH值,其 n值接近于13。
2.1 平台承受的载荷的分类
§2.1 平台承受的载荷的分类
二、设计载荷
指平台在使用期间所受到的除环境载荷以外的其他载荷,它可分为 固定载荷 活载荷
固定载荷 —— 是指作用在平台上的不变载荷,当水位一定时这些载荷为 一定值。
如平台的结构自重,附属结构重量,固定不变的机械设备、管线重量和 作用于平台水下部分的浮力等。 活载荷 —— 则指与平台使用有关的载荷,按其时间变化与作用特点又可
值p0可由下式确定:
p0
1 2g
2(N
/
m2 )
(2 2)
式中:g为重力加速度,取g = 9.8m/s2; γ为空气重量密度,取γ=12.01
N/m3;v为设计风速,m/s。
于是上式可写成
则风压p可以表示为
p0 = 0.613v2
(2-3)
p =0.613CHCsv2
(2-4)
式中:CH为考虑风压沿高度变化的高度系数;Cs为考虑受风构件形状影响
§2.1 平台承受的载荷的分类
三、施工载荷
施工载荷指平台在建造以及海上吊运、安装过程中所承受的载荷,这 些载荷会使一些构件产生瞬时的高应力。
因此,尽管这些载荷不是结构设计的控制载荷,通常也需校核这些载 荷对平台结构所产生的影响。
对于使用载荷和施工载荷的计算,有关的平台结构规范都有明确的规 定,且各国规范的规定也日趋一致。环境载荷是平台结构设计的控制载荷 ,由于受到环境条件等因素的影响,计算比较复杂,下面主要介绍环境载 荷的计算。
表2-3 形状系数Cs
形状 球形 圆柱形 大的平面板(船体、甲板室、甲板以下 的光滑平板) 钻井架 甲板以下暴露的梁和桁材 孤立结构(起重机、梁材)
Cs
0.4 0.5 1.0 1.25 1.30 1.50
§2.2 风载荷
在计算风压p时,设计风速一般是选用50年一遇或100年一遇的风速。我 国移动平台规范规定,设计风速在极端风暴状态时一般不小于51.5m/s ;在 正常作业时不小于36m/s;在遮蔽海区不小于26m/s 。
表2-2 高度系数CH
海平面以上高度h(m)
CH
0~15.3
1.00
15.3~30.5
1.10
30.5~46.0
1.20
46.0~61.0
1.30
61.0~76.0
1.37
76.0~91.5
1.43
91.5~106.5
1.48.0~137.0
1.56
137.0~152.5