以DSP为基础的基于TMS320VC5402的虹膜识别系统
基于TMS320VC5402的指纹识别系统设计
信息工程学院D S P课程设计报告书题目: 基于TMS320VC5402的指纹识别系统专业:电气工程及其自动化班级:学号:学生姓名:指导教师:2010年 6月 25 日信息工程学院课程设计任务书信息工程学院课程设计成绩评定表摘要数字信号处理器(DSP)是指以数值计算的方法对数字信号进行处理的芯片。
它具有处理速度快、灵活、精确、抗干扰能力强、体积小、使用方便等优点。
DSP应用于指纹识别已经成为一个新的科技领域和独立的学科体系,当前已形成了有潜力的产业和市场。
本文选定100MHz DSP TMS320VC5402作为指纹信号的处理器,利用其流水线编码的操作特点,并结合指纹识别技术,实现基于DSP CCS2.2的指纹识别预处理系统。
CCS 2.2(Code Composer Studio)是一种针对标准TMS320调试接口的集成开发环境(IDE),由TI公司于1999年推出。
指纹识别作为生物特征识别的一种,有其不可比拟的优点。
由于可以随身携带这种特殊的“印章”,所以受到越来越多人的重视。
本系统使用TI的TMS320VC5402(以下简称5402)作为核心。
DSP与单片机相比,多用于算法比较复杂,乘加运算量比较大的场合。
该芯片为一款定点的DSP,它具有高达100MIPS的运算能力,同时具有优化的CPU结构和一系列的智能外设。
下面着重讨论基于该芯片的系统设计。
关键词:DSP指纹识别TMS320VC540AbstractDigital signal processor (DSP) refers to the method of numerical calculation of digital signal processing chip.It has high processing speed and flexibility, accuracy, strong anti-jamming capability, small volume, convenient, etc.. DSP applied to the fingerprint identification technology has become a new and independent discipline system has been formed, and the potential of the market and industry. This 100MHz selected TMS320VC5402 DSP as the signal processor, using the fingerprint of the assembly code, combining the characteristics of operation fingerprint identification technology, realizing the fingerprint identification based on DSP CCS2.2 pretreatment system. CCS 2.2 (Code Composer Studio) is a standard interface for TMS320 debugging integrated development environment (IDE), by TI company in 1999. The fingerprint identified as biometrics, its incomparable advantages. Due to the special can carry the "stamp", more and more people's attention. This system USES the TMS320VC5402 TI (hereinafter referred to as the core 5402). DSP microcontroller, compared with the algorithm is more complex, used by calculation and comparison of the big occasion. This chip is a fixed-point DSP, it has 100MIPS up the operation ability, also has the optimization of the structure and a series of intelligence CPU peripherals. Based on the chip below emphatically discussed the system design.Keywords: DSP TMS320VC5402 fingerprint identification目录1 任务提出与方案论证 (6)1.1指纹识别系统的架构 (6)1.2系统各部分设计要点 (6)2 总体设计 (7)2.1存储空间软硬件设计 (7)2.2存储空间软硬件设计 (9)2.3总线控制和驱动 (10)2.4总线与LCD接口硬件设计 (10)2.5指纹图像获取 (11)3 详细设计 (12)3.1硬件设计 (12)3.2软件设计 (19)3.3指纹识别预处理算法 (22)3.4指纹图像在CCS 2.2上的输入与输出 (23)3.5实际指纹图像预处理效果 (23)3.6系统调试方法 (24)4 总结 (25)参考文献 (26)1 任务提出与方案论证随着计算机与信息技术的不断发展,生物识别技术的应用越来越加广泛. 在各种生物识别技术中,指纹识别是目前生物检测学中研究最深入、应用最广泛、发展最成熟的、最有前景的一种识别技术,它通过分析指纹的局部特征,从中抽取详尽的特征点,从而可靠地确认个人身份。
基于TMS320C5402的DSP实验开发系统的设计的开题报告

基于TMS320C5402的DSP实验开发系统的设计的开题报告一、选题背景及意义随着数字信号处理技术的不断发展,在通信、音视频处理、自动控制等领域中,数字信号处理技术得到了广泛应用。
而DSP(Digital Signal Processor)作为数字信号处理核心部件,其灵活、高效、低功耗等特性,成为数字信号处理领域中最为重要的处理器之一。
本课题选用TMS320C5402作为研究对象,设计并实现一个基于TMS320C5402的DSP实验开发系统。
该系统主要面向高校教学和科研领域,旨在为学生提供更好的教学环境及科研平台,帮助学生更好地理解和应用数字信号处理技术。
二、项目内容1. 系统硬件设计:系统硬件主要包括TMS320C5402核心板和外设扩展板,外设扩展板包括通用输入输出、LCD显示屏、音频输入输出、AD、DA、网络接口等。
2. 系统软件设计:系统软件主要包括DSP板支持库、应用程序开发、数据采集与处理、算法实现等。
其中,算法实现部分将选用经典数字信号处理算法,如FFT、数字滤波器等。
3. 系统测试与评估:通过对系统的性能测试和评估,了解系统实现的效果,并对系统进行改进和优化。
三、研究方法1. 硬件设计:通过原理图设计、PCB设计等方式,设计硬件电路,并进行模拟仿真和实际测试,验证电路设计的正确性。
同时,通过外设扩展板的设计,拓展TMS320C5402的应用范围和功能,提高系统的可拓展性和可复用性。
2. 软件设计:根据系统需求和硬件设计,进行DSP板支持库的开发、应用程序开发、数据采集与处理、算法实现等。
其中,算法实现部分将选取合适的数字信号处理算法,并采用MATLAB等工具进行仿真和算法验证,保证算法的正确性和可行性。
3. 系统测试与评估:通过对系统性能进行测试和评估,了解系统实现的效果,并对系统进行改进和优化。
其中,系统测试包括相关性能指标的测试,如运行速度、稳定性、抗干扰性等;系统的评估则需要将系统与其它类似系统进行对比,并分析出差异所在,并做出改进建议。
基于TMS320VC5402的图像采集与处理系统
基于TMS320VC5402的图像采集与处理系统
曹秀岭;齐蓉
【期刊名称】《微处理机》
【年(卷),期】2008(029)004
【摘要】介绍了基于定点DSP图像采集与处理系统的设计与实现.系统采用SAA7111、TMS320VC5402以及IDT42V235等芯片构成,具有接口简单灵活,处理速度快等优点,可在车型车牌识别,交通量检测,机器人视觉,指纹识别等领域得到很好的应用.
【总页数】3页(P41-43)
【作者】曹秀岭;齐蓉
【作者单位】西北工业大学自动化学院,西安,710072;西北工业大学自动化学院,西安,710072
【正文语种】中文
【中图分类】TPN911.72
【相关文献】
1.基于OK图像采集卡和VTK的医学图像处理系统 [J], 孙少平;潘李鹏;贺建峰;马磊
2.基于TMS320VC5402的低端图像采集系统设计与应用 [J], 项小峰;王洋昔;李培弘;刘济林
3.基于TMS320VC5402的音频信号采集与处理系统 [J], 江涛;朱光喜;李顶根
4.基于TMS320VC5402的实时语音采集与处理系统 [J], 王海平;刘琚
5.基于TMS320VC5402的图像采集系统的硬件设计与实现 [J], 马丽娟;曲仕茹因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于TMS320VC5402的指纹识别系统的设计
一种基于TMS320VC5402的指纹识别系统的设计
刘新妹;赵鹏飞
【期刊名称】《山西师范大学学报(自然科学版)》
【年(卷),期】2008(022)003
【摘要】在综合考虑目前技术的发展、性能与成本等因素的基础上,本文设计了一个以TI公司TMS320VC5402处理器为核心的指纹识别系统.该系统的硬件由FPS200 指纹采集传感器、主控电路、输入通路、输出通路、人机交互设备等部分组成.在DSP的集成开发环境下完成了指纹识别算法应用软件的编写,软件实现了指纹图像的预处理、二值化、细化、特征点提取、比对等各项功能,并重点对指纹的图像预处理指纹特征点提取和匹配等算法进行的研究.实验结果表明该系统识别速度快,误识率和拒识率低,因此具有较强的实用价值与广阔的应用前景.
【总页数】4页(P46-49)
【作者】刘新妹;赵鹏飞
【作者单位】电子测试技术国家重点实验室,山西,太原,030051;中北大学信息与通信工程学院山西,太原,030051;中北大学信息与通信工程学院山西,太原,030051【正文语种】中文
【中图分类】TH71;TN06
【相关文献】
1.一种新的TMS320VC5402 DSP上电引导程序的设计方法 [J], 赵锋荣;卢继平
2.一种新的TMS320VC5402DSP上电引导程序的设计方法 [J], 赵锋荣;卢继平
3.基于TMS320VC5402的指纹识别系统 [J], 杨志龙;张维新;寇建锋
4.基于TMS320VC5402的指纹识别系统 [J], 杨志龙;张维新;寇建锋
5.基于TMS320VC5402的指纹识别系统 [J], 杨志龙;张维新;等
因版权原因,仅展示原文概要,查看原文内容请购买。
《基于TMS320VC5402DSP的指纹识别模块的研究》

《基于TMS320VC5402DSP的指纹识别模块的研究》一、引言随着科技的飞速发展,生物识别技术已成为现代社会安全验证的重要手段。
其中,指纹识别技术以其独特性、稳定性和便捷性,得到了广泛的应用。
TMS320VC5402DSP(Digital Signal Processor)作为一款高性能的处理器,其在指纹识别模块中的应用,能够极大地提高指纹识别的效率和准确性。
本文将基于TMS320VC5402DSP的指纹识别模块展开研究,探讨其工作原理、性能特点及实际应用。
二、TMS320VC5402DSP概述TMS320VC5402DSP是一款由德州仪器(TI)公司生产的数字信号处理器,具有高性能、低功耗、高集成度等特点。
其强大的数据处理能力和灵活的配置,使得它在指纹识别模块中发挥着关键作用。
该处理器能够快速地处理指纹图像,提取特征信息,为指纹识别提供强大的支持。
三、指纹识别模块工作原理基于TMS320VC5402DSP的指纹识别模块主要包括指纹图像采集、预处理、特征提取和匹配四个部分。
1. 指纹图像采集:通过高精度的指纹传感器,将指纹信息转化为数字信号。
2. 指纹图像预处理:对采集到的指纹图像进行去噪、增强等处理,以便后续的特征提取。
3. 特征提取:利用TMS320VC5402DSP强大的数据处理能力,从预处理后的指纹图像中提取特征信息,如纹线方向、纹线宽度等。
4. 特征匹配:将提取的特征信息与数据库中的指纹信息进行比对,以完成身份验证。
四、指纹识别模块性能特点基于TMS320VC5402DSP的指纹识别模块具有以下性能特点:1. 高精度:高精度的指纹传感器保证了指纹信息的准确性。
2. 高效率:TMS320VC5402DSP强大的数据处理能力,使得指纹识别的速度大大提高。
3. 抗干扰能力强:指纹识别模块具有较好的抗干扰能力,能够在复杂的环境下稳定工作。
4. 安全性高:通过特征匹配完成身份验证,具有较高的安全性。
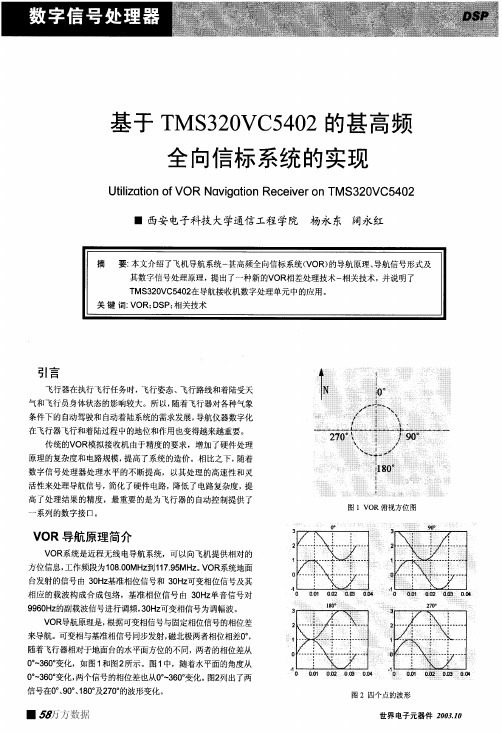
基于TMS320VC5402的甚高频全向信标系统的实现
内置了一个四通道选择器,利用A0、A1和懈7、Ⅲ镗实现通道
的选择。串行数据接口可以分为内部工作方式和外部工作方式,
由管脚EX77, ̄7_控制。输入信号幅度范围为0—4V时,‰接协阴 和协旧;输入信号幅度范围为0—5V时,‰接协阴,协fB接AGND; 输入信号幅度范围为±10V时,‰接协旧,协汨接BlP。
(CCS)下,通过CCS中的探针工具(Profiler)观察执行代码的时 钟周期。每得到4个采样值并对其进行V.34协议编码、调制,然后
输出一个映射帧数据,DSP需要运行6154个时钟周期;所以 DSP的负载程度为:
V.34协议Modem的接收部分后端,是对解调后的二维信号 进行解码。这一单元的主要部分就是维特比译码。维特比译码
图3系统硬件框图
通过HPl与主设备相连时,除了8位HPI数据总 线以及控制信号线外,不需要附加其他的逻辑
硬件设计
系统硬件的框图如图3所示。模拟信号送入AD经过采样,送 入DSP中;A/D采样时钟信号由DSP的XF和HPl脚提供;采样数 据由BlO脚送入DSP;逻辑控制、地址译码由CPLD单元完成;处 理的中间数据和结果放入RAM存储器中。 在DSP外围电路中,AD转换器是一个十分重要的器件,选 择时应主要考虑以下几点:转换器精度;转换时间;数据输出格 式;转换器的价格。转换器精度由输入幅度范围和量化位数共同 决定;转换时间要尽量与DSP的指令周期相匹配;数据输出格式 分为OFFSET BINARY、2’S COMPLEMENT、1。S COMPLE. MENT和SIGN MAGNlTUD E’使用时应注意格式转换。A/D转 换部分采用ADI公司16位四通道串行ADC AD974。它的最大抽 样率为200kSPS,-3dB输入带宽2.7MHz,输入电压范围分别可 以为0—4V、0—5V和±10V。它使用5V单端供电,2.5V参考电压, 内外部可选,最大功耗为120mW,省电状态下为50uW。AD974
基于TMS320VC5402的指纹识别系统
基于TMS320VC5402的指纹识别系统摘要:重点介绍以TMS320VC5402为核心的指纹识别系统的硬件设计,概括地说明软件设计方法,最后给出其硬件调试方法。
关键词:DSP 指纹识别 TMS320VC5402指纹识别作为生物特征识别的一种,有其不可比拟的优点。
由于可以随身携带这种特殊的“印章”,所以受到越来越多人的重视。
本系统使用TI的TMS320VC5402(以下简称5402)作为核心。
DSP与单片机相比,多用于算法比较复杂,乘加运算量比较大的场合。
该芯片为一款定点的DSP,它具有高达100MIPS 的运算能力,同时具有优化的CPU结构和一系列的智能外设。
下面着重讨论基于该芯片的系统设计。
1 总体设计指纹系统总体设计方案如图1所示。
该系统是由指纹采集仪、FPGA、SRAM和Flash等硬件组成。
RS232用于数据传输,PC机可以通过该接口得到指纹特征数据;Flash存储指纹信息库、LCD用的字符和DSP程序;FPGA在DSP的控制下从取指器中取出图放入SRAM中;小键盘用于用户输入ID号码,增强该系统的安全等级。
1.1 存储空间的软硬件设计本系统要访问的存储器有三个:DSP内部DARAM(16K字,用于存放常量和变量的数据空间)、SRAM 和Flash。
因为5402有20根地址线可以用来对程序空间寻址,所以有1M字节的寻址空间,利用高地址线A19来区分Flash和SRAM。
其中SRAM是BootLoader后程序运行的空间,这样就把Flash放在高地址上去了。
5402的数据寻址空间仅为64K,所以要进行分页扩展。
为了避免和DARAM的访问冲突,不能使用64K一页。
因为64K中低地址的16K实际上不能访问,它优先被64K中低地址的16K实现上不能访问,它无被DARAM访问,所以定为32K的一数据页。
分配一个I/O地址,而后通过I/O地址的译码对74LS273进行使能控制,最后锁存I/O的数据作数据页。
基于TMS320VC5402的DSP基本系统的设计
基于TMS320VC5402的DSP基本系统的设计Ξ姜 滨(华中科技大学光电子工程系 武汉 430074)摘 要本文以美国Texas Instruments(TI)公司C5000TM系列DSP中TMS320VC5402为例,介绍用Flash Rom和SRAM构建DSP基本应用系统的硬件设计方法,以及DSP硬件设计中应注意的几个问题。
关键词:DSP FPG A CPLD中图法分类号:TP391The Design of DSP B asic System based on TMS320VC5402Jiang Bin(Photoelectron Engineering Department,HUST,Wuhan430074)Abstract:This paper introduces the hardware design of DSP basic system constructed by Flash Rom and SRAM,taking TMS320VC5402of C5000TM serial from Texas Instruments(TI)for example,and proposes some is2 sues which we shall pay attention to in hardware design.K ey w ords:DSP,FPG A,CPLDClass number:TP391 数字信号处理(DSP)芯片以其高速、低功耗和高集成度在军事、航天等领域大显身手;随着半导体工艺的进步和工业民用领域的大量采用,近几年来,DSP价格大幅下调(某些品种价格已与单片机相当),而性能却不断提高,现已广泛应用于通信、工业控制和消费领域,DSP正日益成为现代信息产业的重要基石。
根据TI公司预测,DSP和Ana2 log器件将成为因特网时代的主导。
1 TI公司TMS320系列DSP目前,TI公司力推的主流DSP为C24X TM、C54X TM和C6000TM,C24X TX系列是16位定点DSP,以较高的性价比广泛应用于马达控制、工业数字控制、信息家电等方面; C54X TM系列是C5000TM中的第二代产品,其特点是高速、低功耗,最适合用于便携式设备(如手机、数码相机、PDA等)和对功耗有严格要求的地方;C6000TM是一个32位高性能的DSP,它包括C62xx、C64xx、C67xx三个系列(其中C67xx为点DSP),采用了Veloci TT 超长指令字(VL IW)结构,C62xx、C64xx、C67xx的单片处理速度最高可分别达到2400M IPS、4800M IPS和1GFLOPS,主要用Ξ收到本文时间:2002年11月19日于无线基站、网络、视频和图像处理领域,需要注意的是它的功耗较大和对PCB的设计、制板工艺要求较高。
一种基于TMS320VC5402的指纹识别系统的设计
收 稿 日期 : 0 80 -0 20 - 2 4 作 者 简 介 : 新 妹 (9 5 ) 女 , 西 太 原人 , 刘 16 一 , 山 中北 大 学讲 师 , 士 研 究 生 , 要 从 事 测 试 计 量 技 术 及 仪 器 方 面 的 研 究 。 博 主
2 系统硬件平 台的实现
基 T ' 2V 50 MS 0 C 42型 的 D P指纹识 别 系统 的硬 件 电路 主要 包括 : M 30 C 42 S 、P 20指 纹传 3 S T S2 V 50 D P F S0 感器 、L S F A H接 口及显示 和键 盘 电路 . 硬件 结构框 图如 图 2所 示 .
1 指 纹 识 别 系统 的工 作 原 理
指纹识别系统从整体上可分为指纹图像采集 、 图像处理和识别三大部分组成. 工作原理框图如图 1 所
示.
系统学习模块负责采集用户指纹数据 , 对指纹图像进行预处理 , 提取这些指纹特征 , 作为将来的对 比
模板存 入数据 库 ; 指纹识 别模块 则负 责采集 和处 理指纹 图像 , 在提 取特征 后 与数据库 中的指纹模 板进 行对 比 , 后判 断是否 匹配 , 出结 论 ]整 个系统 核心 就是 图像处 理 、 征提取 以及 指纹 比对 . 然 得 . 特
F S0 P20指纹采集传感器基于电容器充放 电原理 , 传感 阵列的每一点是一个金属 电极 , 当电容器 的 充
一
极, 接触在 传感 面上 的手指 的对应点 则作 为另 一极 , 两者 之 间 的传 感 面形 成 电 容两 极之 间 的介 电层 . 指
基于TMS320VC5402的DSP基本系统的设计

基于TMS320VC5402的DSP基本系统的设计
姜滨
【期刊名称】《计算机与数字工程》
【年(卷),期】2003(031)003
【摘要】本文以美国Texas Instruments(TI)公司C5000TM系列DSP中
TMS320VC5402为例,介绍用Flash Rom和SRAM构建DSP基本应用系统的硬件设计方法,以及DSP硬件设计中应注意的几个问题.
【总页数】4页(P17-20)
【作者】姜滨
【作者单位】华中科技大学光电子工程系,武汉,430074
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于TMS320VC5402的DSP最小系统设计 [J], 李迎春;王玉峰;王达伟
2.基于闪存的TMS320VC5402 DSP独立系统的实现 [J], 吴增荣;夏志忠
3.基于TMS320VC5402的DSP 最小系统设计 [J], 尹剑利;赵鑫;杜永博
4.基于TMS320VC5402DSP的电子提花龙头检测器系统设计 [J], 刁红泉;胡伟雄;颜钢锋
5.基于TMS320VC5402 DSP高速PCI数据处理系统设计 [J], 马俊
因版权原因,仅展示原文概要,查看原文内容请购买。
DSP基于TMS320VC5402的DSP最小应用系统的设计
D S P课程设计报告书题目: 基于TMS320VC5402的DSP最小系统设计专业:电气工程及其自动化班级:电气F1102学号: 201123910507学生姓名:唐智强指导教师:张世杰课程设计题目:基于TMS320VC5402的DSP最小系统设计指导教师评语:成绩:指导教师:张世杰年月日基于TMS320VC5402的DSP最小系统设计李迎春王玉峰王达伟(北华航天工业学院电子工程系,河北廊坊065000)摘要:TMS320VC5402是由TI公司生产的性价比极高的定点DSP芯片。
主要研究了基于TMS320VC5402的最小系统板的软硬件设计。
针对电源电路、复位电路、时钟电路、JTAG接口电路、DSP芯片电路提出可行的设计方案。
同时,给出了一个点亮LED灯的完整汇编源代码。
关键词:DSP;TMS320VC5402;最小系统;硬件设计;软件设计基金项目:河北省教育厅青年基金项目(2010206);北华航天工业学院教研项目(JY-2010-003-Y)收稿日期:2011-12-04作者简介:李迎春(1976-),女,讲师,博士,湖北荆门人,主要从事DSP和图像处理的教学和科研工作。
目录引言........................................................................................................................................ - 4 - 1TMS320VC5402简介........................................................................................................... - 4 - 2系统硬件设计........................................................................................................................ - 4 - 2. 1电平转换............................................................................................................................ - 4 - 2. 2电源控制电路.................................................................................................................... - 5 - 2. 3复位电路............................................................................................................................ - 5 - 2. 4时钟电路............................................................................................................................ - 6 - 2. 5译码电路............................................................................................................................ - 6 - 2. 6输入接口电路.................................................................................................................... - 6 - 2. 7输出接口电路.................................................................................................................... - 7 - 2. 8存储器扩展电路................................................................................................................ - 7 - 2. 9JTAG仿真接口电路 ......................................................................................................... - 7 - 3系统软件设计........................................................................................................................ - 8 - 3. 1引导程序............................................................................................................................ - 8 - 3. 2用户程序.......................................................................................................................... - 10 - 参考文献- 15 -4总结...................................................................................................................................... - 16 -引言在仪器仪表迅速发展的同时,计算机和网络技术也在迅速发展,PC机已经从高速增长进入到平稳发展时期,单纯由PC机带领电子产业蒸蒸日上的时代己经成为历史,嵌入式系统的出现和广泛应用,使计算机和网络进入了后PC时代。
基于TMS320VC5502的频谱分析系统设计

The Design and Implement of Spectrum Analysis System Based on DSPAbstract: The real-time spectrum analysis and display system, which is based on TMS320VC5402 as data processing core and AT89C51 as transaction processing core is designed in this paper. The practical results illustrated that this system can analyze the frequency spectrum efficiently with the range of 0~32kHz.Keywords: frequency spectrum analysis, DSP, SCM, FFT.摘要:设计了一种实时信号频谱分析系统,该系统以TMS320VC5402 DSP作为系统数据处理核心,以AT89C51单片机作为系统事务处理核心,实现对信号的实时频谱分析并显示。
实验结果表明:该系统能对频率在0~32kHz的范围内的信号很好地完成频谱分析。
关键词:频谱分析DSP 单片机FFT引言频谱分析实质是对信号功率谱的估计,功率谱估计技术渊源很长,广泛应用于雷达、声纳、通信、地质探测、天文、生物医学工程等众多领域[1]。
在DSP芯片出现之前,频谱分析的实现是依靠模拟滤波的方法来完成的,数字信号处理技术的发展为频谱分析提供了新的解决方法[2]。
本文设计了一种基于DSP的频谱分析系统。
该系统以TI公司的DSP芯片TMS320VC5402作为数据处理核心,以A T89C51为事务处理核心,组成了具有数据采集、实时数据处理和频谱显示功能的硬件平台,在此基础上应用FFT技术,形成数字化的频谱分析系统。
基于TMS320VC5402的LED显示系统设计

信息工程学院课程设计报告书题目: 基于TMS320VC5402的LED显示系统设计专业:电气工程及其自动化班级:学号:学生姓名:指导教师:2020年 9 月 25 日信息工程学院课程设计任务书2020年9月25 日信息工程学院课程设计成绩评定表摘要:文章介绍了一种以TMS320VC5402 DSP为操纵核心的LED显示屏设计方案,采纳DSP 和单片机别离处置显示成效和显示刷HPI 接话柄现的与PC主机快速并行通信,其显示成效灵活多样、数据传输速度快、显示刷新率高,已成功的应用于实践中。
要解决好LED显示屏与pc机的通信问题,传统菜用单片机下位机操纵显示屏。
由于单片机时钟频率较低,处置能力有限无法知足大量数据的处置要求。
关键词: TMS320C54x LED显示 DSP HPIAbstract:This chapter introduces a LED screen design.The core of this control system is TMS320VC5402 DSP,which has an excellence processing performance.This design use double ports RAM to communicate with MCU,and use the DSP’s HPI interface to communicate with PC.This design had been used in practice with in flexible display effect and high transfers speed.To resolve the problem of the communication of LED displaywith the pc machine,traditional dishes with the lower position control the MCU display. As the MCU clock frequency is low, the limited processing capacity can not meet with large amounts of data processing requirements.Keywords: TMS320C54x LED screen DSP HPI目录1 引言.............................................. 错误!未定义书签。
基于DSP的虹膜识别系统的研究的开题报告
基于DSP的虹膜识别系统的研究的开题报告一、选题意义和背景虹膜是人眼的一部分,具有稳定性高、辨识度高、难以伪造等特性,因此成为了一种安全可靠的身份认证方式。
基于虹膜识别技术的应用已经广泛,如门禁系统、电脑登录、金融交易等,而其中基于DSP的虹膜识别系统具有极高的识别速度和准确性。
因此,本文将基于DSP平台研究虹膜识别系统,旨在探究该技术在实际应用中的可靠性和稳定性,并提高其识别速度和精度,为该领域的研究提供技术支持和实用价值。
二、研究内容和目标本项目拟研究的主要内容包括以下几个方面:1.虹膜图像采集虹膜识别系统的重要第一步是采集用户的虹膜图像。
本项目将探究如何在不同光线条件下采集高质量的虹膜图像,并通过DSP平台将其进行处理和优化。
2.DSP处理算法本项目将研究虹膜图像进行处理和优化的DSP算法,主要包括图像预处理、特征提取和匹配等。
3.系统实现和测试根据研究提出的虹膜识别算法,本项目将完成基于DSP的虹膜识别系统的设计和实现,并对其进行测试和评估。
研究目标:1.探究基于DSP平台的虹膜识别算法及其可靠性和稳定性。
2.提高虹膜识别系统的识别精度和速度。
3.设计出高效、可靠的基于DSP的虹膜识别系统。
三、研究方法和实验计划本项目的研究方法主要分为以下几步:1.搜集并研究相关文献,了解虹膜识别技术的发展历程、现状和未来趋势。
2.通过调研和实地测试,采集不同环境下的虹膜图像,运用DSP平台对采集数据进行处理和优化。
3.研究虹膜识别算法,包括对图像的预处理、特征提取和匹配等关键步骤进行分析。
4.设计并实现基于DSP的虹膜识别系统,并在不同环境下进行测试和评估。
实验计划:第一周:研究相关文献。
第二周:调研虹膜图像采集,收集和处理数据。
第三周:研究虹膜图像的预处理算法。
第四周:研究虹膜的特征提取算法。
第五周:研究虹膜匹配算法。
第六、七周:设计和实现基于DSP的虹膜识别系统。
第八周:系统测试和评估。
四、预期成果和意义本项目预期获得的成果包括:1.基于DSP的虹膜识别算法及其应用。
基于tms320vc5402的语音信号采集系统设计《dsp原理及应用》课程设计大学毕设论文
湖北民族学院信息工程学院D S P课程设计报告书题目: 基于TMS320VC5402的语音信号采集系统设计专业:电气工程及其自动化班级: 0307406班学号:学生姓名:指导教师:黄勇2010 年 6 月 25 日信息工程学院课程设计任务书年月日信息工程学院课程设计成绩评定表摘要在研究数字信号处理的基础上,提出了一个基于DSP TMS320VC5402和A/D转换芯片TLC320AD50的语音信号采集系统的设计。
给出了该系统的总体设计方案,具体硬件电路,包括系统电源设计、复位电路设计、时钟电路设计、存储器设计、A/D接口电路设计、JTAG 接口设计、DSP与A/D芯片的连接等,以及软件流程图。
实验表明: 所设计的基于DSP的硬件和软件系统是一个很好的语音信号采集系统,该系统结构清晰,电路简洁,易于实现。
关键词:语音信号;数据采集;DSP;TLC320AD50AbstractIn the study based on digital signal processing,proposed a design based on DSP TMS320VC5402 and A / D converter chip TLC320AD50 speech signal acquisition system.Gives the overall design scheme of the system, the hardware circuit including the system power supply design, the reset circuit design, clock circuits, memory design, A / D interface circuit, JTAG interface design,the connections of DSP and A / D chip and so on, and software flow chart. Experiments show that: the design based on DSP hardware and software systems is an excellent voice signal acquisition system, the system structure is clear, the circuit is simple and easy to achieve.Key words: Voice signal; Data Acquisition; DSP;TLC320AD50目录1 任务提出与方案论证 (7)1.1 TMS320VC5402介绍 (7)1.2 TLC320AD50介绍 (11)2 总体设计 (12)2.1 DSP核心模块的设计 (12)2.2 A\D转换模块 (13)3 详细设计 (14)3.1 硬件设计 (14)3.1.1 DSP芯片 (14)3.1.2 电源设计 (14)3.1.3 复位电路设计 (15)3.1.4 时钟电路设计 (16)3.1.5 程序存储器扩展设计 (16)3.1.6数据存储器扩展设计 (17)3.1.7 JTAG接口设计 (17)3.1.8 A/D接口电路设计 (18)3.2 软件设计 (19)3.2.1 MATLAB 环境中的语音信号采集和处理仿真 (19)3.2.2系统软件设计 (20)4 总结 (26)参考文献 (27)1 任务提出与方案论证20世纪50年代以来,随着数字信号处理各项技术的发展,语音信号处理技术得到不断提高, 语音合成、语音识别、语音记录与语音控制等技术已开始逐步成熟并得到应用。
基于TMS320VC5402的DSP最小系统设计

基于TMS320VC5402的DSP最小系统设计李迎春;王玉峰;王达伟【摘要】TMS320VC5402是由TI公司生产的性价比极高的定点DSP芯片。
主要研究了基于TMS320VC5402的最小系统板的软硬件设计。
针对电源电路、复位电路、时钟电路、JTAG接口电路、DSP芯片电路提出可行的设计方案。
同时,给出了一个点亮LED灯的完整汇编源代码。
%T MS320VC5402 is a 16 bit fixed point digital signal processor which is produced by TI company. The software and hard- ware design of minimal system based onTMS320VC5402 was researched. The feasible projects were given for power supply, re-set, timing,JTAG emulation, DSP circuit. And a complete assembly source code was also listed, which was used to light LED.【期刊名称】《北华航天工业学院学报》【年(卷),期】2012(022)001【总页数】3页(P16-18)【关键词】DSP;TMS320VC5402;最小系统;硬件设计;软件设计【作者】李迎春;王玉峰;王达伟【作者单位】:北华航天工业学院电子工程系,河北廊坊065000;:北华航天工业学院电子工程系,河北廊坊065000;:北华航天工业学院电子工程系,河北廊坊065000【正文语种】中文【中图分类】TP2740 引言DSP系统设计可分为硬件设计和软件设计。
而DSP硬件设计可以分为最小硬件系统板和外围接口电路两部分。
DSP最小板作为开发DSP系统的基础,一般主要包括电源、复位电路、时钟电路、外部存储器总线接口电路、仿真器接口电路等部分,缺一不可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要本文是以TM320VC5402 DSP 为核心的虹膜识别系统的硬件设计 ,提出了一种由FPGA 、 OV5017 与 TMS320VC5402 组成的DSP 应用硬件平台 ,并详细介绍了系统的设计方案和关键硬件的结构设计以及软件设计方法。
关键词: DSP 虹膜识别 TM320VC54021 概述在高度信息化的现代社会, 信息安全问题日益受到人们的关注。
近年来兴起的生物特征识别技术具有很好的可靠性,虹膜识别技术是一种最新的生物识别技术 ,它以虹膜识别算法为基础 ,可达到优异的识别准确度 ,即使全人类的虹膜信息都录入到一个数据库中 ,出现认假和拒假的可能性也很小。
由于虹膜识别技术所具有的高精度使它被广泛应用于各识别领域。
本系统使用的核心处理器是德州仪器公司 ( TI) 的TMS320VC5402(以下简称 C5402) ,该芯片为一款性价比较高的定点数字信号处理器(DSP) 。
它采用先进的修正哈佛(Harvard)结构体系 ,片内共有 8条总线、 CPU 、 片内存储器和外围电路等硬件 ,加上高度专业化的指令系统 ,使其具有功耗小、 高度并行等特点。
下面着重讨论基于该芯片的系统设计。
2 硬件设计2.1 系统硬件结构本 系 统 由 C5402、CCD 、 Flash 存储器、 SRAM 等芯片组成 ,如图 1 所示。
图1 系统硬件框图FLASH 存储器AT29LV020SDRAM 存储器 K4556132E CF 卡 EMIFTMS320VC5402 VP2 VP0 VDDCCD A/D 转换器TVP5145 CPLD MAX3000 LCD 显示器 电源 TPS3307CCD 机负责虹膜图像的采集 ,SDRAM 用于程序执行和虹膜数据暂存。
FLASH 实现 OV5017 配置、 虹膜图像存储空间的地址生成、C5402 寻址片外存储器的页地址管理和 C5402 与外围器件之间通信的仲裁等功能。
RS2232 用于数据传输 ,PC 可以通过该接口得到虹膜特征数据 , Flash 存储器用于存储程序、 初始化数据和虹膜特征数据库。
键盘用于用户输入 ID 号 ,系统依据用户 ID 号从虹膜特征库中读样本图像编码数据。
2.2 虹膜图像采集硬件设计本文选用 Omni Vision 公司的 OV5017 作为图像采集芯片。
OV5017 是一种高度集成的黑白数字摄像芯片 ,集成了 CMOS 传感技术。
带有一个1/ 4英寸镜头 ,并支持多种格式。
像素数最大可达384 ×288。
支持外部水平、 垂直同步输入格式 ,包括8bit 的A/ D 转换器 ,支持模拟视频、 数字视频输出。
该芯片数字视频输出为不间断比特流 ,片内可实现包括帧速率、 曝光设定以及图像大小编程等功能。
OV5017 与 FPGA 的接口如图 2 所示。
图2 OV5017 与 FPGA 的接口图中 FPGA 为一片 Altera 公司的 EPM9320215 ,用于初始化 OV5017 的控制寄存器 ,图像数据地址生成以及把采集来的虹膜图像存入 SRAM 存储器中。
FPGA 具体功能如下:配置 OV5017 的控制寄存器 ,A[ 0. . 3 ]为内部寄存器地址 ,D[ 0. . 7 ]复用。
设置 CSB = 0、 OEB =1、 WEB = 0 ,OV5017 进入写使能状态。
写 0xC4 到寄存器 FCTL ,设置 OV5017 为单帧输出模式;写0x01 到寄存器 FDIV ,设置帧速率 FR(f rame rate)为25f/ s ,像素时钟 PR(pixel rate)为3. 579 5MHz ;其他寄存器为系统默认值。
虹膜图像取系统默认值 384×288。
(2) 图像数据地址生成并存储图像。
图像数据地址由 FPGA 利用 OV5017 输出的行同步信号(HREF) 、 场同步信号 (VSYNC) 和图像像素时钟(PCL K)生成 ,并把采集来的一帧图像存入图像存储器中。
2.3 接口硬件设计PCLK OEB WEB CSB HREF A[0..3] VXYNC D[0..7] I/O I/O A[0..17] I/O I/O DO[0..17] I/O AR[0..3] I/O I/O I/O DI[0..7] A[0..17] D[0..7] WE CS OEC5402 有两个多通道缓存同步串口(McBSP) ,若要与计算机通信须把同步通信转换成异步通信。
本模块中采用 Maxim 公司 MAX3111E 接口芯片 ,同一个 McBSP 实现 DSP 与PC 的通信。
MAX3111E芯片中集成了 UART、 RS2232 和可编程的波特率发生器 (可用于300baud~230kbaud) 。
UART具有 8 个字的接收存储 FIFO ,使处理器的开销最小 ,并且可以提供 4 个可屏蔽的中断。
在保证UART和 RS2232 共同接地和供电的情况下 ,它们可以配套使用 ,也可以单独实现其功能。
最大波特率为230bit / s。
另外 ,本系统中还预留了一个McBSP和C5402 的 HPI接口 ,以备扩展使用。
3 系统软件设计3.1 系统流程系统流程图如图 3 所示。
( 1 ) 系统上电之后首先对 OV5017 和MAX3111E进行配置 ,其次经并行 16 位数据线将程序从 Flash 存储器写入 C5402 的程序存储区 ,系统进入等待状态;(2) 用户从键盘输入个人 ID ,C5402 读取样本图像编码数据到数据缓存 ,当 CMOS数字摄像机采集触发信号传至 FPGA 时 , FPGA 利用 OV5017 提供的行场同步信号产生存储空间地址 ,将采集所得的数据存入图像存储器( SRAM) ,一帧图像存储结束之后 ,FPGA 通知C5402 ( INT0) ;( 3) C5402利用DMA方式从图像存储器读取图像数据 ,并进行虹膜识别核心算法处理[3 ] [4 ]。
本系统中虹膜图像为110 ×8kbit ,在算法编号中是以32 ×8kbit的数据为一个单元进行处理 ,中间结果存入数据存储器中 ,这样可以提高运算速度 ,简化了FPGA中页地址管理寄存器的软件编写;(4) C5402 处理结束后 ,计算结果经 RS2232 接口传回计算机。
3.2 Bootloader程序设计C5402片内设置有Boot 程序 ,Boot 程序的主要作用是在开机时将用户程序从外部装入到程序存储器。
当用户程序很大超过了 32K,必须采用以下特殊的Boot 方法。
(1) 在 Reset 后 ,将 Flash 存储器译码在数据区 ,RAM译码在程序区 ,利用片内 Boot 程序将自己编写的初始化程序从外部数据区搬移至内部 RAM中;(2) 用户初始化程序发出一个 I/ O 命令(如XF) ,将 Flash 存储器译码到程序区的高地址 ,开放数据用于其他的 RAM。
(3) 用户初始化程序中包括第二次 Boot 程序(此程序必须用户自己编写) ,将 Flash 存储器中没有Boot 的其他代码搬移到 RAM 中。
(4) 开始运行用户处理程序。
自己编写的第二次Boot 程序如下:. def load start. sect″ load prg″load start :ssbx intmld # 0 , dpnopld # address1 , astm # address2 ,ar1rpt # lengthreada3ar1 +endboot :orm # 020h , @1dhld # address3 , abacc a. End其中address1 为 Flash 存储器中没有Boot 的代码源地址 ,address2 为没有Boot 的代码目标地址 ,length为代码长度 ,address3 为主程序代码开始执行地址。
3. 3 虹膜识别核心算法程序的设计虹膜识别核心算法程序的设计本系统虹膜核心算法包括三部分:图像预处理、虹膜纹理特征提取与编码和模式匹配。
具体算法如下:(1)图像预处理:获得眼睛图像后的下一个任务就把虹膜部分从图像中分离出来 ,即虹膜定位 ,这是虹膜识别系统中重要的一部分。
虹膜是瞳孔和巩膜间的环形可视部分 ,对虹膜的定位就是要找到虹膜内外边缘。
为更好的说明定位过程 ,用 I ( x , y)表示所获得的眼睛图像的灰度函数 ,虹膜内外边缘的圆形轮廓用中心点为( x0 , y0) ,半径为 r 的参数模型表示。
虹膜定位算法如下:其中:G σ是均值为 r0 ,方差为σ的高斯函数 ,用来平滑滤波、消除噪声 ,以利于检测边界处的梯度变化; 3 表示卷积;a/a r为微积分算子表示求方向梯度。
微积分算子作用于图像 ,通过不断增大半径 r ,沿以半径为r和中心坐标为( x0 , y0)的弧 ds 进行线积分。
用式(1)算法定位虹膜内外边缘的过程就是在参数空间( r , x0 , y0)搜索灰度变化的最大绝对值的过程。
(2) 特征提取与编码:2D2Gabor 滤波器具有方向选择性。
利用这个特点对虹膜图像提取局部相位信息 ,其实现公式如下:其中 G( x , y , f ,φ)为二维 Gabor 函数 ,φ表示滤波方向 , f 表示正弦曲面的频率 , Gabor 函数具有方向选择性和频率选择性(二维 Gabor 函数的具体特性参见文献 5) 。
Gabor 滤波器的尺寸为 M ×N , ( i ,j)为每块图像的中心位置。
式(2)得到的局部相位信息的值为复数 ,虹膜识别系统中选定一个阈值来量化信息的实部和虚部 ,即如果大于阈值时值为 0 ,小于阈值时值为 1。
由于选取了四个方向的 Gabor基函数进行滤波 ,则每个方向可用 2bit 表示 ,并且每个图像块的编码为实部加虚部 ,所以每块用 4bit 表示。
虹膜图像分块的数目不同 ,特征编码的长度就不同。
(3) 模式区配:编码后的模式匹配基于汉明距离:其中©表示异或运算 , L 为码长 , x i 和 t i 为待识别图像编码和样板图像编码的第 i 个码字。
如果两个编码相同 ,则 HD 为0 ;如果两编码各位相反 ,则 HD为 1。
由于一幅虹膜图像的相位编码的码字为 C和为1 的概率等同 ,且不同虹膜之间不相关 ,因此 E( HD)为0. 5。
根据以上的算法 ,DSP 的编程实现被分解成三大任务模块:即图像预处理、特征提取与编码以及模式匹配。
需要注意的是每一个模块都必须注意页面管理寄存器的值 ,因为如果程序仅在 SRAM 中运行会浪费大量的时间 ,所以可以把部分程序和数据放入DSP的内部运行。
在 C和汇编混合编程的时候 ,存在 C语言和汇编语言的变量以及函数的接口问题。