Si114x-中文手册
114智能制造质量智能监控系统_用户手册

智能制造质量智能监控系统V1.0使用说明书一、引言文章摘要本文档详细描述关于如何利用各模块的设置对系统进行日常管理、维护、统计。
读者对象本文档的读者对象为系统的使用者,或者指导最终用户使用本系统的相关人员。
我们假定最终用户已掌握如下知识:⊙Windows/win7/win8/win10等操作系统的使用;⊙Chome浏览器/搜狗浏览器/360浏览器/IE等浏览器的使用;⊙基本的Internet的原理常识。
1.1登录启动并运行系统,可以在电脑的桌面,找到系统软件的图标,双击鼠标的左键就可以启动并运行了;另外一种,你也可以在电脑的“开始菜单”中找到系统软件的快速启动方式,点击鼠标左键一样可以打开运行。
成功启动并运行系统后,马上就会进入到系统的登录界面,如下图:用户输入用户名和密码时需要注意以下几点:用户名和密码登录密码需在8-16位之间,由数字和字母组成。
用户名和密码不能输入空格键。
管理员的默认用户名是admin密码是12345678。
成功启动并运行系统后,马上就会进入到系统的登录界面,操作人员必须输入正确的:用户名、密码才能进入系统,如果操作员输入的信息不合法,系统将会立即提示你“用户名或密码错误”,必须在登录成功之后才能进入软件的主界面,输入错误就会提示失败输入的用户名或密码错误,这时候要求重新输入,只有输入正确之后才能进入主界面。
1.2首页当用户通过管理员账号或者重新注册的账号登录系统,进入到系统的第一个界面时,用户可以查看系统的主页信息,登陆系统以后系统会自动下载补丁进行系统升级。
但是当前系统为最新系统,所以不需要更新升级,然后用户可以看到系统的主要菜单,系统的主要模块菜单都有功能菜单即系统的子菜单,详情如下图所示:用户能够清楚的在界面内看到系统的主要功能和系统的状态指示。
根据实际的需求,用户可以在界面内进行相应的功能操作。
非常的简单方便。
1.3通讯连接在首页界面的导航栏中有一个通讯连接选项,点击通讯连接选项,进入到通讯连接控制界面中,该界面中显示了一些通讯连接的信息,节省了用户的管理时间,提高了工作效率,详情如下图所示:1.4制造控制中心在当前系统的菜单界面上,找到控制中心按钮,点击鼠标左键打开子页面之后,就可以操作子页面的相关信息;在子页面中,按照一般我们的操作习惯,点击子页面的操作按钮/选项,就能进入到子页面上所包含的有相应的模块功能;页面上对每个独立的模块都有比较详细的操作功能流程说明,可以根据流程说明进行具体的操作,详情如下图所示:1.5监控管理用户在使用本系统进行监控管理的过程中,为了方便用户进行管理,可以在系统内,进行监控管理的新增功能,方便用户进行监控管理,也节省了用户的核算时间,提高了核算效率,点击界面内的监控管理按键,系统弹出对应的窗口。
LPC1114的IO配置部分的中文手册

表111. LPC111x 引脚配置引脚配置--图8–10引脚描述表8–114引脚配置--图8–10引脚描述表8–114引脚配置图8–8-图8–10引脚描述表8–112表8–114图8–10表8–112表8–113表8–1143. LPC111x 引脚描述表 112. LPC1113/14 引脚描述表 (LQFP48 封装)RESET — 外部复位输入:此引脚上的低电平会使设备复位,I/O 端口和外设复位成初始的默认状态,并使处理器从0地址开始执行。
I/O PIO0_0 — 通用数字输入/输出引脚。
PIO0_1/CLKOUT/ CT32B0_MAT2PIO0_2/SSEL0/ CT16B0_CAP04[1]I/O PIO0_1 —通用数字输入/输出引脚。
复位时低电平启动在线系统编程命令处 理程序。
O CLKOUT — 时钟输出脚。
OCT32B0_MAT2 —32位定时器0匹配输出2。
10[1]I/O PIO0_2 —通用数字输入/输出引脚。
O SSEL0 —SPI0从机选择。
ICT16B0_CAP0 —16位定时器0捕获输入0。
PIO0_314[1] I/OPIO0_3 —通用数字输入/输出引脚。
.I/O SCK0 —SPI0串行时钟。
PIO0_7/CTS 23[1] I/O PIO0_7 —通用数字输入/输出引脚(大电流输出驱动器)。
I CTS —UART清除发送。
PIO0_8/MISO0/CT16B0_MAT0PIO0_9/MOSI0/CT16B0_MAT1 SWCLK/PIO0_10/ SCK0/CT16B0_MAT2TDI/PIO0_11/AD0/CT32B0_MAT3 TMS/PIO1_0/AD1/CT32B1_CAP0 TDO/PIO1_1/AD2/CT32B1_MAT0TRST/PIO1_2/AD3/CT32B1_MAT1 27[1] I/O PIO0_8 —通用数字输入/输出引脚。
13x_14x_14x1数据手册
10 11 12 13 14 15
33 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
2
P1.5/TA0 P1.6/TA1 P1.7/TA2 P2.0/ACLK P2.1/TAINCLK P2.2/CAOUT/TA0 P2.3/CA0/TA1 P2.4/CA1/TA2 P2.5/Rosc P2.6/ADC12CLK P2.7/TA0 P3.0/STE0 P3.1/SIMO0 P3.2/SOMI0 P3.3/UCLK0 P3.4/UTXD0
D
D D
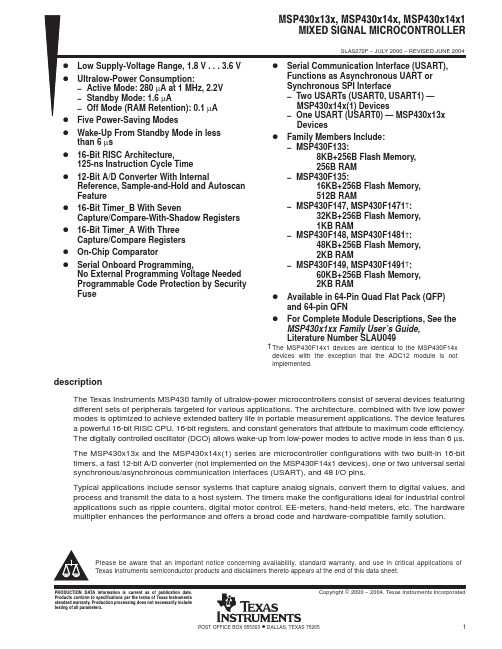
† The MSP430F14x1 devices are identical to the MSP430F14x devices with the exception that the ADC12 module is not implemented.
description
The Texas Instruments MSP430 family of ultralow-power microcontrollers consist of several devices featuring different sets of peripherals targeted for various applications. The architecture, combined with five low power modes is optimized to achieve extended battery life in portable measurement applications. The device features a powerful 16-bit RISC CPU, 16-bit registers, and constant generators that attribute to maximum code efficiency. The digitally controlled oscillator (DCO) allows wake-up from low-power modes to active mode in less than 6 µs. The MSP430x13x and the MSP430x14x(1) series are microcontroller configurations with two built-in 16-bit timers, a fast 12-bit A/D converter (not implemented on the MSP430F14x1 devices), one or two universal serial synchronous/asynchronous communication interfaces (USART), and 48 I/O pins. Typical applications include sensor systems that capture analog signals, convert them to digital values, and process and transmit the data to a host system. The timers make the configurations ideal for industrial control applications such as ripple counters, digital motor control, EE-meters, hand-held meters, etc. The hardware multiplier enhances the performance and offers a broad code and hardware-compatible family solution.
Si55xx-EB 用户指南说明书

UG444: Si55xx Evaluation Board User's GuideThe Si55xx-EB is used for evaluating Si5518, Si5512, Si5510 andSi5508 Low Phase Noise Jitter Attenuating Clocks, which can beused for 5G/eCPRI/SyncE/IEEE 1588 applications. The Si5518 com-bines a high-performance JESD204B/C compatible RF clock jitterattenuator and two fifth-generation DSPLLs supporting SyncE/IEEE1588 network synchronization. All the Si55xx devices support up tosix inputs. The Si5518/10/08 all have 18 differential outputs while theSi5512 has 12 differential outputs. The Si55xx-A-EB should be usedin conjunction with Skyworks’ ClockBuilder™ Pro software.This document is intended for all Si55xx-A-EVB product variants which includes Si5518,Si5512, Si5510 and Si5508. The exact device and revision is distinguished by a white 1x 0.187 inch label underneath the board’s silkscreen name. The Si5518 device is installedon the evaluation board and will be used for evaluation purposes of any of the productvariants. ClockBuilder Pro software is used to select the specific product variant to beevaluated (Si5518/10/08). The "Si5518-A-EB" label indicates that the evaluation board hasbeen assembled with an Si5518 device, Revision A, installed. Strictly for ordering purposes,the terms “EB” and “EVB” refer to the board and kit, respectively. In this document, the terms are synonymous.KEY FEATURES •Si55xx-A-EVB used with ClockBuilder Pro software to evaluate Si5518,Si5512, Si5510, Si5508•Powered from USB port and an external power supply, via either a screw terminal connector or a compatible wall-mounted ac adapter •Onboard 54 MHz low phase noise XO and a 54 MHz crystal •Layout provisions for select VCXO and XTAL components •ClockBuilder Pro GUI-programmable VDD supply supports device core voltages of 3.3 V and 1.8 V •ClockBuilder Pro GUI-programmable VDDO supplies allow each of the outputs to have its own power supply voltage selectable from 3.3 V, 2.5 V, or 1.8 V •ClockBuilder Pro GUI-controlled voltage, current, and power measurements of VDD and all VDDOsupplies•Status LEDs for power supplies andcontrol/ status signals of the Si55xxdevice•SMA connectors for input clocks,output clocks, optional externalreference, and optional VCNTRL•EVB board modifications for Low-Power ModeSkyworksSolutions,Inc.•Phone[781]376-3000•Fax[781]376-3100•*********************• Skyworks Proprietary Information • Products and Product Information are Subject to Change Without Notice • June 29, 20221D o c u m e n t A v a i l a b l e U n d e r N D A C o n t a c t S k y w o r k s f o r A c c e s sCopyright © 2022 Skyworks Solutions, Inc. All Rights Reserved.Information in this document is provided in connection with Skyworks Solutions, Inc. (“Skyworks”) products or services. These materials, including the information contained herein, are provided by Skyworks as a service to its customers and may be used for informational purposes only by the customer. Skyworks assumes no responsibility for errors or omissions in these materials or the information contained herein. Skyworks may change its documentation, products, services, specifications or product descriptions at any time, without notice. Skyworks makes no commitment to update the materials or information and shall have no responsibility whatsoever for conflicts, incompatibilities, or other difficulties arising from any future changes.No license, whether express, implied, by estoppel or otherwise, is granted to any intellectual property rights by this document. Skyworks assumes no liability for any materials, products or information provided hereunder, including the sale, distribution, reproduction or use of Skyworks products, information or materials, except as may be provided in Skyworks’ Terms and Conditions of Sale.THE MATERIALS, PRODUCTS AND INFORMATION ARE PROVIDED “AS IS” WITHOUT WARRANTY OF ANY KIND, WHETHER EXPRESS, IMPLIED, STATUTORY, OR OTHERWISE, INCLUDING FITNESS FOR A PARTICULAR PURPOSE OR USE, MERCHANTABILITY, PERFORMANCE, QUALITY OR NON-INFRINGEMENT OF ANY INTELLECTUAL PROPERTY RIGHT; ALL SUCH WARRANTIES ARE HEREBY EXPRESSL Y DISCLAIMED. SKYWORKS DOES NOT WARRANT THE ACCURACY OR COMPLETENESS OF THE INFORMATION, TEXT, GRAPHICS OR OTHER ITEMS CONTAINED WITHIN THESE MATERIALS. SKYWORKS SHALL NOT BE LIABLE FOR ANY DAMAGES, INCLUDING BUT NOT LIMITED TO ANY SPECIAL, INDIRECT, INCIDENTAL, STATUTORY, OR CONSEQUENTIAL DAMAGES, INCLUDING WITHOUT LIMITATION, LOST REVENUES OR LOST PROFITS THAT MAY RESUL T FROM THE USE OF THE MATERIALS OR INFORMATION, WHETHER OR NOT THE RECIPIENT OF MATERIALS HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGE Skyworks products are not intended for use in medical, lifesaving or life-sustaining applications, or other equipment in which the failure of the Skyworks products could lead to personal injury, death, physical or environmental damage. Skyworks customers using or selling Skyworks products for use in such applications do so at their own risk and agree to fully indemnify Skyworks for any damages resulting from such improper use or sale.Customers are responsible for their products and applications using Skyworks products, which may deviate from published specifications as a result of design defects, errors, or operation of products outside of published parameters or design specifications. Customers should include design and operating safeguards to minimize these and other risks. Skyworks assumes no liability for applications assistance, customer product design, or damage to any equipment resulting from the use of Skyworks products outside of Skyworks’ published specifications or parameters.Skyworks, the Skyworks symbol, Sky5®, SkyOne®, SkyBlue™, Skyworks Green™, ClockBuilder®, DSPLL®, ISOmodem®, ProSLIC®, and SiPHY® are trademarks or registered trademarks of Skyworks Solutions, Inc. or its subsidiaries in the United States and other countries. Third-party brands and names are for identification purposes only and are the property of their respective owners. Additional information, including relevant terms and conditions, posted at , are incorporated by reference.SkyworksSolutions,Inc.|Nasdaq:SWKS|*********************| USA: 781-376-3000 | Asia: 886-2-2735 0399 | Europe: 33 (0)1 43548540Portfolio Quality /quality SW/HW /CBPro Support & Resources/support。
丝锐实验室 Si114x 光感应板快速启动指南说明书
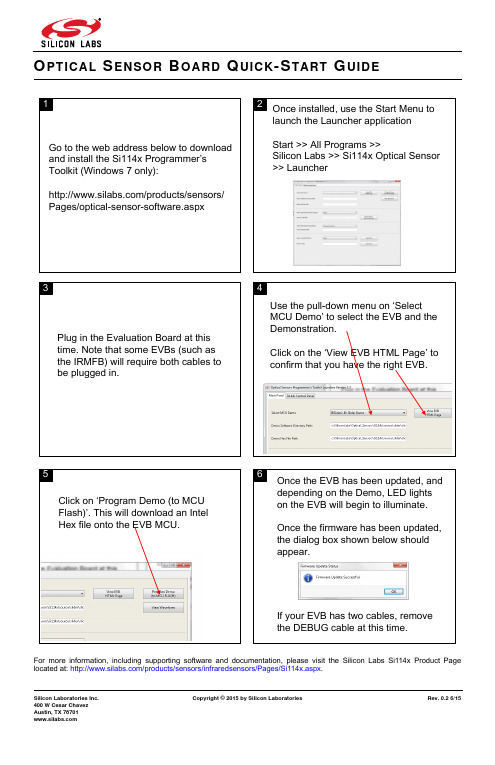
Silicon Laboratories Inc.Copyright © 2015 by Silicon Laboratories Rev. 0.2 6/15400 W Cesar Chavez Austin, TX 78701O PTICAL S ENSOR B OARD Q UICK -S TART G UIDEFor more information, including supporting software and documentation, please visit the Silicon Labs Si114x Product Page located at: /products/sensors/infraredsensors/Pages/Si114x.aspx .6Once the EVB has been updated, and depending on the Demo, LED lights on the EVB will begin to illuminate.If your EVB has two cables, removeFor more information, including supporting software and documentation, please visit the Silicon Labs Si114x Product Page located at: /products/sensors/infraredsensors/Pages/Si114x.aspx .Source Code for the demo can beexamined through ‘Select and View MCU 9It is possible to choose different HEX files more suitable for outdoor use. The ‘Search’ option allows you to choose other HEX files outside the project also.It is also possible to go to source directoryOnce the choice is made, click ‘Flash EVB’EVB’For more information, including supporting software and documentation, please visit the Silicon Labs Si114x Product Page located at: /products/sensors/infraredsensors/Pages/Si114x.aspx .Click on the ‘View Waveform’ button to start Once the waveform begins, you canclick on the Pause button to pause.Once ‘View Waveform’ is started, a file c:\SiliconLabs\Optical_Sensors\Si114x\executable\launcher\output.csv is generated so that the samples can be examined using a text editor。
SI-30 chinese manual

! 注意!!!
本中文操作说明书是由英文原版翻译而成,仅供用户参考,详情请参 阅随机英文原版说明书;
因生产商对设备更改而使说明书与实际操作造成的差异,恕不另行通 知。
பைடு நூலகம்广州市一帆船务设备有限公司
2
自动识别系统 SI-30 中文操作说明书
目
录
1. 缩写.....................................................................................................................................5 2. 概要.....................................................................................................................................5
2.1.1. 主要信息 ........................................................................................
Si446x中文API文档
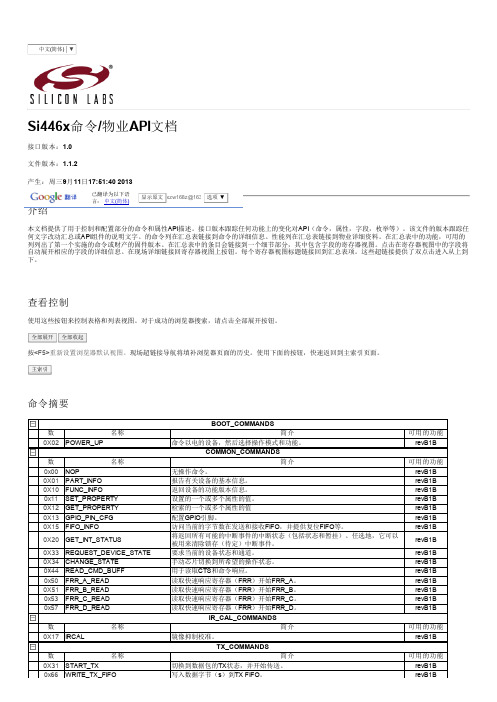
0X10 FUNC_INFO
0x11 SET_PROPERTY
0X12 GET_PROPERTY
0X13 GPIO_PIN_CFG
0X15 FIFO_INFO
0X20 GET_INT_STATUS
0X33 REQUEST_DEVICE_STATE 0X34 CHANGE_STATE 0×44 READ_CMD_BUFF 0x50 FRR_A_READ 0X51 FRR_B_READ 0x53 FRR_C_READ 0x57 FRR_D_READ
PKT_RX_FIELD_2_LENGTH 0X26 0X27 PKT_RX_FIELD_2_CONFIG 为0x28 PKT_RX_FIELD_2_CRC_CONFIG 0X29
PKT_RX_FIELD_3_LENGTH 0X2A 0x2B中 PKT_RX_FIELD_3_CONFIG 0X2C PKT_RX_FIELD_3_CRC_CONFIG 0X2D PKT_RX_FIELD_4_LENGTH 0X2E
0X18 PROTOCOL_CFG
0X21 GET_PH_STATUS
0x23 GET_CHIP_STATUS
写入数据字节(s)到TX FIFO。 RX_COMMANDS 简介
返回最后接收到的数据包有关的变量字段的长度信息,以及(可选)覆盖字段 的长度。 返回调制解调器中断组(包括状态和暂挂)的中断状态。任选地,它可以被用 来清除锁存(待定)中断事件。 切换到RX状态,并开始数据包的接收。 手动跳变到一个新的频率,而在RX模式。 从RX FIFO中读取数据字节(s)。
组 0X20 0X20
数
名称
0x00 MODEM_MOD_TYPE
0X01 MODEM_MAP_CONTROL
Si4438中文数据手册
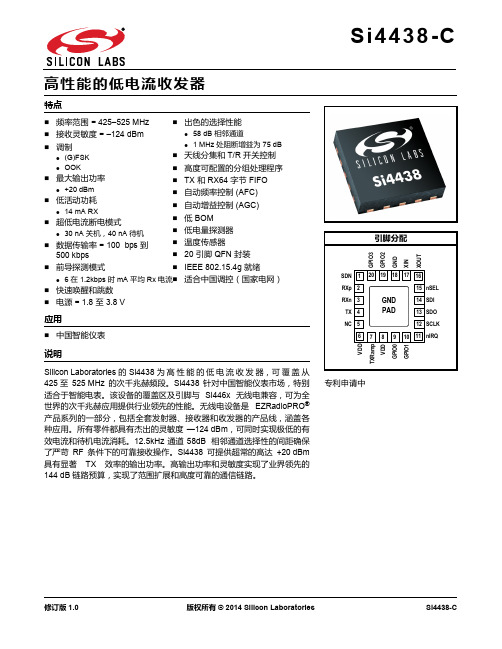
修订版 1.0 版权所有 © 2014 Silicon LaboratoriesSi4438-C特点应用说明Silicon Laboratories 的Si4438为高性能的低电流收发器,可覆盖从425至 525MHz 的次千兆赫频段。
Si4438 针对中国智能仪表市场,特别适合于智能电表。
该设备的覆盖区及引脚与 Si446x 无线电兼容,可为全世界的次千兆赫应用提供行业领先的性能。
无线电设备是 EZRadioPRO ®产品系列的一部分,包括全套发射器、接收器和收发器的产品线,涵盖各种应用。
所有零件都具有杰出的灵敏度—124dBm ,可同时实现极低的有效电流和待机电流消耗。
12.5kHz 通道 58dB 相邻通道选择性的间距确保了严苛 RF 条件下的可靠接收操作。
Si4438 可提供超常的高达 +20dBm 具有显著 TX 效率的输出功率。
高输出功率和灵敏度实现了业界领先的144dB 链路预算,实现了范围扩展和高度可靠的通信链路。
⏹频率范围=425–525MHz ⏹接收灵敏度=–124dBm ⏹调制● (G)FSK ● OOK⏹最大输出功率● +20dBm⏹低活动功耗● 14mA RX⏹超低电流断电模式● 30nA 关机,40nA 待机⏹数据传输率=100 bps 到 500kbps⏹前导探测模式● 6在 1.2kbps 时 mA 平均 Rx 电流⏹快速唤醒和跳数⏹电源=1.8 至 3.8V⏹出色的选择性能● 58dB 相邻通道● 1MHz 处阻断增益为 75dB⏹天线分集和 T/R 开关控制⏹高度可配置的分组处理程序⏹TX 和 RX64 字节 FIFO⏹自动频率控制 (AFC)⏹自动增益控制 (AGC)⏹低 BOM⏹低电量探测器⏹温度传感器⏹20 引脚 QFN 封装⏹IEEE 802.15.4g 就绪⏹适合中国调控(国家电网)⏹中国智能仪表专利申请中Si4438-C功能框图Product Freq. Range Max Output Power TX Current RX Current Si4438425–525MHz+20dBm75mA13.7mASi4438-C修订版 1.03目录章节页码1. 电气规格 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42. 功能描述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113. 控制器接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123.1. 串行外围接口 (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123.2. 快速响应寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143.3. 工作模式和计时 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143.4. 应用程序编程接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183.5. 中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183.6. GPIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184. 调制和硬件配置选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.1. 调制类型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.2. 硬件配置选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.3. 前导长度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215. 内部功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.1. RX 链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.2. RX 调制解调器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.3. 合成器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .255.4. 发送器(TX ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .275.5. 晶体振荡器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .296. 数据处理和分组处理程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316.1. RX 和 TX FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316.2. 分组处理程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .327. RX 调制解调器配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338. 辅助块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.1. 唤醒定时器和 32kHz 时钟源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.2. 低占空比模式(自动 RX 唤醒) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.3. 温度、电池电压和辅助 ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .348.4. 低电量探测器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .358.5. 天线分集 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .358.6. 前导探测模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .359. 引脚描述:Si4438-C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3710. 订购信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3911. 封装外形:Si4438 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4012. PCB 焊盘图案:Si4438 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4113. 顶部标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4313.1. Si4438 顶部标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4313.2. 顶部标记说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43联系信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44Si4438-C1. 电气规格Table 1. DC Characteristics *Parameter Symbol Test ConditionMin Typ Max Unit Supply Voltage RangeV DD 1.8 3.3 3.8V Power Saving ModesI Shutdown RC Oscillator, Main Digital Regulator, and Low Power Digital Regulator OFF —30—nA I Standby Register values maintained and RCoscillator/WUT OFF —40—nA I SleepRC RC Oscillator/WUT ON and all register valuesmaintained, and all other blocks OFF —740—nA I SleepXO Sleep current using an external 32kHz crystal.— 1.7—µA I Sensor -LBD Low battery detector ON, register values maintained, and all other blocks OFF —1—µA I ReadyCrystal Oscillator and Main Digital Regulator ON,all other blocks OFF— 1.8—mA Preamble Sense Mode CurrentI psm Duty cycling during preamble search,1.2kbps, 4 byte preamble —6—mA I psmFixed 1s wakeup interval, 50kbps, 5 bytepreamble—10—µA TUNE Mode Current I Tune_RX RX Tune —7.6—mA I Tune_TX TX Tune —7.8—mA RX Mode Current I RXH —13.7—mA TX Mode Current (Si4438)I TX_+20+20dBm output power, class-E match, 490MHz,3.3V—75—mA*Note: All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltageand from –40 to +85°C unless otherwise stated. All typical values apply at VDD =3.3V and 25°C unless otherwise stated.Si4438-CTable 2. Synthesizer AC Electrical Characteristics1Parameter Symbol Test Condition Min Typ Max UnitF SYN425—525MHz Synthesizer FrequencyRange (Si4438)F RES-525425–525MHz—14.3—Hz Synthesizer FrequencyResolution2—50—µs Synthesizer Settling Time t LOCK Measured from exiting Ready mode withXOSC running to any frequency.Including VCO Calibration.Phase Noise Lφ(f M)∆F=10kHz, 460MHz—–109—dBc/Hz∆F=100kHz, 460MHz—–111—dBc/Hz∆F=1MHz, 460MHz—–131—dBc/Hz∆F=10MHz, 460MHz—–141—dBc/HzNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD=3.3V and 25°C unless otherwise stated.2. Default API setting for modulation deviation resolution is double the typical value specified.Si4438-CTable 3. Receiver AC Electrical Characteristics 1ParameterSymbol Test ConditionMin Typ Max Unit RX Frequency Range (Si4438)F RX 425—525MHz RX Sensitivity 2P RX_0.5(BER < 0.1%)(500bps, GFSK, BT =0.5,∆f =±250Hz)2—–124—dBmP RX_40(BER < 0.1%)(40kbps, GFSK, BT =0.5,∆f =±20kHz)2—–108—dBmP RX_100(BER < 0.1%)(100kbps, GFSK, BT =0.5,∆f =±50kHz)1—–104—dBmP RX_9.6(BER < 0.1%)(9.6kbps, GFSK, BT =0.5,∆f =±4.8kHz)2—–114—dBmP RX_OOK(BER < 0.1%, 4.8kbps, 350kHz BW,OOK, PN15 data)2—–108—dBm (BER < 0.1%, 40kbps, 350kHz BW,OOK, PN15 data)2—–102—dBm (BER < 0.1%, 120kbps, 350kHz BW,OOK, PN15 data)2—–98—dBm RX Channel Bandwidth BW 1.1—850kHz RSSI Resolution RES RSSI —±0.5—dB ±1-Ch Offset Selectivity, 450MHz 2C/I 1-CHDesired Ref Signal 3dB above sensitivity, BER < 0.1%. Interferer is CW, and desired is modulated with2.4kbps∆F =1.2kHz GFSK with BT =0.5, RXchannel BW =4.8kHz, channel spacing =12.5kHz —–60—dBBlocking 1MHz Offset 21M BLOCK Desired Ref Signal 3dB above sensitivity, BER =0.1%. Interferer is CW, and desired is modulated with2.4kbps,∆F =1.2kHz GFSK with BT =0.5,RX channel BW =4.8kHz —–77—dB Blocking 8MHz Offset 28M BLOCK—–84—dBImage RejectionIm REJRejection at the image frequency.IF =468kHz—40—dBNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD =3.3V and 25°C unless otherwise stated.2. Measured over 50000 bits using PN9 data sequence and data and clock on GPIOs. Sensitivity is expected to be betterif reading data from packet handler FIFO especially at higher data rates.Si4438-CTable 4. Transmitter AC Electrical Characteristics1Parameter Symbol Test Condition Min Typ Max Unit TX FrequencyRangeF TX425—525MHz(G)FSK Data Rate2DR FSK0.1—500kbps OOK Data Rate2DR OOK0.1—120kbps Modulation DeviationRange∆f525425–525MHz—750—kHz Modulation DeviationResolution3F RES-525425–525MHz—14.3—HzOutput Power Range4P TXTypical range at 3.3Vwith class E match optimized for bestPA efficiency.–20—+20dBmTX RF Output Steps∆PRF_OUT Using Class E match within 6dB of maxpower—0.25—dBTX RF Output LevelVariation vs. Temperature∆P RF_TEMP–40 to +85︒C— 2.3—dB TX RF Output LevelVariation vs. Frequency∆P RF_FREQ—0.6—dBTransmit ModulationFiltering B*T Gaussian Filtering Bandwith TimeProduct—0.5—Notes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD=3.3V and 25 °C unless otherwise stated.2. The maximum data rate is dependent on the XTAL frequency and is calculated as per the formula:Maximum Symbol Rate=Fxtal/60, where Fxtal is the XTAL frequency (typically 30MHz).3. Default API setting for modulation deviation resolution is double the typical value specified.4. Output power is dependent on matching components and board layout.Si4438-CTable 5. Auxiliary Block Specifications 1ParameterSymbol Test ConditionMin Typ Max Unit Temperature Sensor SensitivityTS S—4.5—ADC Codes/°C Low Battery Detector ResolutionLBD RES —50—mV Microcontroller ClockOutput Frequency Range 2F MCConfigurable to Fxtal or Fxtal divided by 2, 3, 7.5, 10, 15, or 30 where Fxtal is the reference XTAL frequency. In addition, 32.768kHz is also supported.32.768K—FxtalHzTemperature Sensor Conversion TEMP CT Programmable setting—3—ms XTAL Range 3XTAL Range25—32MHz 30MHz XTAL Start-Up Timet 30MUsing XTAL and board layout in reference design. Start-up time will vary with XTAL type andboard layout.—300—µs30MHz XTAL Cap Resolution30M RES —70—fF 32kHz XTAL Start-Up Time t 32k —2—sec 32kHz Accuracy using Internal RC Oscillator 32KRC RES—2500—ppm POR Reset Timet POR——6msNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at V DD =3.3V and 25°C unless otherwise stated.2. Microcontroller clock frequency tested in production at 1MHz, 30MHz, 32MHz, and 32.768kHz. Other frequenciestested in bench characterization.3. XTAL Range tested in production using an external clock source (similar to using a TCXO).Si4438-CTable 6. Digital IO Specifications (GPIO_x, SCLK, SDO, SDI, nSEL, nIRQ, SDN)1Parameter Symbol Test Condition Min Typ Max Unit Rise Time2,3T RISE0.1x V DD to 0.9x V DD,C L=10pF,DRV<1:0>=LL— 2.3—nsFall Time3,4T FALL0.9x V DD to 0.1x V DD,C L=10pF,DRV<1:0>=LL—2—nsInput Capacitance C IN—2—pF Logic High Level Input Voltage V IH V DD x0.7——V Logic Low Level Input Voltage V IL——V DD x0.3V Input Current I IN0<V IN< V DD–1—1µA Input Current If Pullup is Activated I INP V IL=0V1—4µADrive Strength for Output Low Level I OmaxLL DRV[1:0]=LL3— 6.66—mA I OmaxLH DRV[1:0]=LH3— 5.03—mA I OmaxHL DRV[1:0]=HL3— 3.16—mA I OmaxHH DRV[1:0]=HH3— 1.13—mADrive Strength for Output High Level I OmaxLL DRV[1:0]=LL3— 5.75—mA I OmaxLH DRV[1:0]=LH3— 4.37—mA I OmaxHL DRV[1:0]=HL3— 2.73—mA I OmaxHH DRV[1:0]=HH3—0.96—mADrive Strength for Output High Level for GPIO0I OmaxLL DRV[1:0]=LL3— 2.53—mA I OmaxLH DRV[1:0]=LH3— 2.21—mA I OmaxHL DRV[1:0]=HL3— 1.7—mA I OmaxHH DRV[1:0]=HH3—0.80—mALogic High Level Output Voltage V OH DRV[1:0]=HL V DD x0.8——V Logic Low Level Output Voltage V OL DRV[1:0]=HL——V DD x0.2V Notes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltageand from –40 to +85°C unless otherwise stated. All typical values apply at V DD=3.3V and 25°C unless otherwise stated.2. 6.7ns is typical for GPIO0 rise time.3. Assuming VDD=3.3V, drive strength is specified at Voh (min)=2.64V and Vol(max)=0.66V at room temperature.4. 2.4ns is typical for GPIO0 fall time.Si4438-CTable 7. Thermal Operating CharacteristicsParameterValue Unit Operating Ambient Temperature Range T A –40 to +85︒C Thermal Impedance θJA 25︒C /W Junction Temperature T JMAX +105︒C Storage Temperature Range T STG–55 to +150︒CTable 8. Absolute Maximum Ratings*ParameterValue Unit V DD to GND–0.3, +3.8V Instantaneous V RF-peak to GND on TX Output Pin –0.3, +8.0V Sustained V RF-peak to GND on TX Output Pin –0.3, +6.5V Voltage on Digital Control Inputs –0.3, V DD + 0.3 V Voltage on Analog Inputs–0.3, V DD + 0.3V Voltage on XIN Input when using a TCXO –0.7, V DD + 0.3V RX Input Power+10dBm*Note: Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. Theseare stress ratings only and functional operation of the device at or beyond these ratings in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability. Power Amplifier may be damaged if switched on without proper load or termination connected. TX matching network design will influence TX V RF-peak on TX output pin. Caution: ESD sensitive device.2. 功能描述Si4438 设备为高性能低电流的无线 ISM 收发器,可覆盖次千兆赫波段。
导向机电技术有限公司KS114技术说明书

KS114技术说明书版本:Ver.1.05创新技术源自导向技术深圳市导向机电技术有限公司Dauxi Technologies Co.,Ltd.All rights reserved.Modify Date Content Edit Revsion Note Nov.22,2019Parameter revision L.Q.B. 1.00Initial release. Jun.3,2020Beam angle added.X.T.C. 1.01Page5.Nov.23,2020Increase the content of reference assemblydimensions.X.Y.C. 1.02Please refer to Page23.Dec.21,2020Increase the ID and the protocol withverification.X.Y.C. 1.03Please refer to Page17.Sep.12,2021The assembly size of the KS114increases thecontrol tolerance.Y.M.G. 1.04Please refer to Page23.Sep.6,2022Add command“0x14”“0x1e”X.T.C. 1.05Page5,8,18:目录KS114功能摘要: (3)KS114电性能参数 (3)编码规则注解 (4)探测范围图 (5)I2C模式 (6)KS114连线及说明: (6)修改I2C地址时序: (7)KS114工作流程: (7)探测指令 (8)距离探测 (11)电源降噪指令(0x70,0x71,0x72,0x73,0x74,0x75)、波特率指令(0x77/0x78/0x79)波束角配置指令(0x7a-0x7e/0x80/0x81/0x82) (11)时序图 (12)休眠等待时间设置 (13)TTL串口及485串口模式 (14)TTL及485串口模式接线 (14)修改串口地址时序 (15)KS114工作流程 (15)探测结束智能识别 (17)探测指令 (17)电源降噪指令(0x70,0x71,0x72,0x73,0x74,0x75)、波特率指令(0x77/0x78/0x79)波束角配置指令(0x7a-0x7e/0x80/0x81/0x82) (20)时序图 (21)完整发货清单 (21)KS114装配尺寸图: (22)安装孔建议: (23)装配注意事项: (23)使用建议: (24)附件-例程: (25)KS114功能摘要:●IP65防水(IP67防水型号KS204/KS214),收发分体式设计,针对KS106/KS106A/KS136/KS136A的双探头版本设计;●主板与探头封装在一起,输出信号为数字量距离信号,与KS103类似;●可软件配置的波束角水平100°竖直50°或水平90°竖直40°;●探测范围:1cm-3m(常用1cm-1.5米。
si823x中文数据手册

0.5 和 4.0 安 培 I S O D R I V E R ( 2. 5 和 5
特性
KVRMS)
一个封装内两个完全隔离的驱动 60 ns 传送延时 (最大) 器 独立 HS 和 LS 输入或 PWM 输入 最高 5 kVRMS 输入到输出隔离 版本 最高 1500 VDC 峰值驱动器到驱动 瞬态抑制 >45 kV/µs
宽体 SOIC-16 窄体 LGA-14
SOIC-16
应用
供电系统 电机控制系统 直流到直流隔离供电
照明控制系统 等离子显示器 太阳能和工业变换器
安全认证
UL 1577 认证
1
VDE 认证合规
60747-5-5 (VDE 0884 第 5 部分) EN 60950-1 (强化绝缘)
IEC
分钟内最多 5000 Vrms
CSA component notice 5A 认证
IEC
60950-1, 61010-1, 60601-1 CQC 认证 (强化绝缘) GB4943.1
描述
Si823x 隔离驱动器系列将两个独立、隔离的驱动器集成到一个封装内。 Si8230/1/3/4 是高侧 / 低侧驱动器,而 Si8232/5/6/7/8 是双驱动器。 还提 供峰值输出电流 0.5 A (Si8230/1/2/7) 和 4.0 A (Si8233/4/5/6/8) 的版本。 所有驱动器的最大供电电压为 24 V。 Si823x 驱 动 器 采 用 Silicon Labs 自 主 研 发 的 硅 隔 离 技 术,提 供 符 合 UL1577 的 5 kVRMS 耐受电压以及 60 ns 快速传送时间。 驱动器输出可连 接到相同或独立的地线进行接地,或者连接到正或负电压。 单个控制输入 (Si8230/2/3/5/6/7/8) 或 PWM 输入 (Si8231/4) 配置提供滞后 >400 mV 的 TTL 级兼容输入。 高度的集成、低传送延时、较小的外形及其灵活性和成 本效益性使 Si823x 系列非常适合 MOSFET/IGBT 门驱动器隔离应用。
高精密高性能模拟开关ISL4311x中文资料
注:1. 所示开关为逻辑“0”输入
引脚描述
2
武汉力源信息技术股份有限公司
免费电话:800-880-8051
数据手册 DS-107-00017CN
真值表
注:逻辑“0” ≤ 0.8V,逻辑“1” ≥ 2.4V 订购信息
注:Intersil无铅产品采用特殊的无铅材料制成,模塑料/晶片的附属材料和100%无光泽锡盘引脚符合 RoHS标准,兼容SnPb和无铅低温焊接操作。Intersil无铅产品在无铅峰值回流温度中属于MSL级别分类, 完全满足和超过IPC/GEDEC JSTD-020的无铅要求。
免费电话:800-880-8051
数据手册 DS-107-00017CN
应用
电池供电,手提和便携式设备 ——蜂窝式/移动式电话,寻呼机 ——膝上型,笔记本,掌上型 PDAs 通信系统 ——无线电收音机 ——用户交换机,自动用户交换机 测试设备 ——逻辑和光谱分析器 ——便携式仪表,数字式电压表,数字万用表 医学设备 ——超声波,MRI,CAT 扫描 ——心电图仪,血液分析器 平视显示器 音频和视频转换 通用目的电路 ——+3V/+5V 数模转换器和模数转换器 ——抽样和保持电路 ——数字滤波器 ——运算放大器增益转换电路 ——高频模拟转换 ——高速多路复用 ——积分复位电路
最大引线温度(10s,低温焊接)…………………………………… 260℃
最大储存温度范围 ………………………………………… -65℃到 150℃
最大引脚温度范围(低温焊接 10s) ……………………… 300℃
注意:强度超出所列的极限参数可能导致器件的永久性损坏。这些仅仅是极限参数,并不意味着在极限条
典型性能曲线图
MSP430F13X_14X系列中文数据手册.

MSP430x13x , MSP430x14x , MSP430x14x1混合信号微控制器低电源电压范围:1.8~3.6V超低功耗:待机模式:1.6uA关闭模式 (RAM保持 :0.1uA活动模式:280uA at 1MHz, 2.2V5种省电模式6us 内从待机模式唤醒16位 RISC 结构, 125ns 指令周期带内部参考,采样保持和自动扫描特性的 12位 A/D转换器有 7个捕获 /比较寄存器的 16位定时器 Timer_B有 3个捕获 /比较寄存器的 16位定时器 Timer_A片内集成比较器串行在线编程,无需外部编程电压,安全熔丝可编程代码保护 .器件系列包括:–MSP430F133:8KB+256B闪速存储器, 256B 的 RAM–MSP430F135:16KB+256B闪速存储器, 512B 的 RAM–MSP430F147, MSP430F1471:32KB+256B闪速存储器, 1KB 的 RAM –MSP430F148, MSP430F1481:48KB+256B闪速存储器, 2KB 的 RAM–MSP430F149, MSP430F1491:60KB+256B闪速存储器, 2KB 的 RAM可用封装:64脚方形扁平封装 (QFP.描述德州仪器的 MSP430系列是一种超低功耗微控制器系列,由针对各种不同应用模块组合特性的多种型号组成.微控制器可设计成使用电池长时间工作.由于其 16位的体系结构, 16位的 CPU 集成寄存器和常数发生器, 可使 MSP430实现了最大化的代码效率。
数字控制振荡器使所有低功率模式唤醒到运行模式小于 6us 的唤醒时间。
MSP430x13x 和 MSP430x14x 系列是有两个内置 16位定时器,一个快速 12位 A/D转换器,一或两个通用串行同步 /异步通信接口 (USART和 48个 I/O引脚构造的微控制器。
典型应用为传感器系统,把模拟信号转换成数字值,处理并发送数据到主系统。
Silicon Labs Si114x 红外手势感应技术说明书

Rev. 0.1 1/15Copyright © 2015 by Silicon LaboratoriesAN580NFRARED ESTURE ENSING1. IntroductionTouchless user interfaces are an emerging trend in embedded electronics as product designers seek outinnovative control methods and more intuitive ways for users to interact with electronics. Active infrared proximitymotion sensing can solve this challenge. Silicon Labs Si114x proximity and ambient light sensor products areideally suited to touchless gesturing applications such as page turning on an e-reader, scrolling on a tablet PC, orGUI navigation. The Si114x features up to three LED drivers and has the ability to sense gestures within a 7 to15cm product interaction region, assuming a hand as the detectable object. This document will discuss in detailhow Silicon Labs implements motion sensing using infrared technology. There are two primary methods used forgesture sensing – position-based and phase-based. Position-based gesture sensing involves finding gesturesbased on the calculated location of an object while phase-based gesture sensing is based on the timing of thechanges in signal to determine the direction of an object’s motion.2. Hardware ConsiderationsThis application note focuses on detecting gestures made by a user’s hand. It is important to recognize that theconcepts introduced in this application note can be applied to targets other than the hand, as long as the hardwareis designed appropriately. The end application and individual system constraints will each dictate the rangerequirements for IR gesture sensing. Since object reflectance is the main measurable component for touchlessgesturing, a hand is presumed to be the detectable object for the examples in this document. Whereas a hand canachieve gesture sensing up to 15cm away from the Si114x sensor, a finger, with dramatically lower reflectance,can achieve gesture sensing at a range of <1cm for thumb-scroll type applications.The general guideline for designing a gesture sensing system with multiple LEDs is to make sure that there is no“dead spot” in the middle of the detectable area. When a target is placed above the system and is not detected, thetarget is in a reflectivity dead spot. To avoid dead spots in the system, the LEDs must be placed such that theemitted infrared light can reflect off the target and onto the sensor from the desired detection range. Figure 1shows systems designed to detect a hand or a finger. The most susceptible area for a dead spot is directly abovethe sensor in between the two LEDs. The two LEDs are placed as close to the edge of the target as possible toprovide feedback in the middle while also keeping enough distance between the LEDs so that it can be detectedwhen the finger or hand moves to the left or right.AN580Rev. 0.1Ideal Hardware Formations—Hand versus Finger DetectionOther than the placement of the LEDs in relation to the size of the hand, the location and reflectance of the target inrelation to the system is also very important. Notice that the Si11xx device is placed under the palm of the hand andmiddle of the finger. For the hand detecting system, the fingers are not a good focal point because light can slipbetween the fingers, and the shape/curve of the outline of the fingers also makes for unpredictable measurements.For the finger detecting system, the tip of the finger is curved and reflects less light than the middle of the finger.For more information about other hardware considerations for infrared proximity sensing in general, refer to“AN498: Si114x Designer’s Guide”. For more information about LEDs, refer to “AN521: irLED Selection Guide forSi114x Proximity Applications”.2.1. Method 1—Position-based Gesture SensingThe position-based motion sensing algorithm involves three primary steps. The first step is the conversion of theraw data inputs to usable distance data. The second step uses the distance data to estimate the position of thetarget object, and the third step checks the timing of the movement of the position data to see if any gesturesoccurred.Step 1—Converting Counts to Distance : The infrared (IR) proximity sensor outputs a value for the amount ofinfrared light fed back to the device from the IR LEDs. These values increase as more light is reflected by anobject or hand moving closer to the system. This example presumes that a hand is the defined target fordetection. The system can estimate how far one’s hand is based on characterization of the proximity sensing(PS) feedback for a hand at certain distances. For example, if a hand is placed in front of the system about10cm away and the PS measurement yielded 5000 counts, then subsequent PS measurements around 5000counts also mean that there is a similarly reflective hand approximately 10cm away from the system.Taking multiple data points at varying distances from the system helps to interpolate between these points andcreate a piece-wise equation for the conversion from raw PS counts to distance estimation. Note that forsystems with multiple LEDs, each LED will have a different PS feedback for each hand distance so each LEDwill need its own counts to distance equation.Si11xxSi11xxAN580 In Figure2, the characterization for a two-LED system is displayed. Each LED must be characterized with a target suspended over the midpoint between the LED and the sensing device. When Target 1 is suspended over the sensing device and IR LED 1, the measured feedback will correlate to a distance D1 above the system. The same is true for Target 2, IR LED 2, and D2.AN580Step 2—Estimating Position : The next step in the process of detecting gestures is to take the distance datafrom Step 1 and estimate the target’s position. The position estimate comes from the formula for the intersectionof two circles. An LED’s light output is conical in nature, but for this approximation, the LED’s output isconsidered to be spherical. With the LED’s on the same axis, the intersection of these two spheres can beconsidered using equations for the intersection of two circles.Consider the characterization performed in Figure 2 in the previous section. Figure 3 shows what theestimations D1 and D2 mean when a single target is suspended over the middle area of the system. D1 and D2are estimations of the distance from the points P1 and P2 to the target above the system. If D1 and D2 arethought of as radii of two circles, the intersection of these two circles is the point where the target is located.Figure 3.Single Target Distance ApproximationFigure 4 is an expanded version of Figure 3. The measurements “a” and “b” have been added to label thelocation of the target along the axis between the two points P1 and P2. Also note that the distancemeasurements D1 and D2 have been renamed to R1 and R2 to represent that they are being considered asradii now.AN580Figure 4.Intersection of Two Circles ImplementationThe value of “a” will be the location of the object along the axis between P1 and P2. A negative value ispossible and will mean that the target is on the left side of P1.Step 3—Timing Gestures : With a positioning algorithm in place, keeping track of timing allows the system tosearch for and acknowledge gestures. For hand-swiping gestures, the entry and exit positions are the mostimportant to consider. If the hand enters the right side with a very high “a” value and exits the left side with avery low “a” value, then a left swipe occurred, as long as the timing between the entry and exit happened withina chosen time window. If the position stays steadily in the middle area for a certain period of time, then thisgesture can be considered a pause gesture.The system must keep track of the timestamps for the entry, exit, and current positions of the target in thedetectable area. With timing information and position information, most gestures can be recognized. Timing willneed to be custom tuned to each application and each system designer’s preference. Silicon Labs ReferenceDesigns use a quarter of a second for the gesture time requirement.Silicon Labs’ IrSlider2EK is a great example and starting point for comprehending the fundamentals of position-based gesturing.Using d a b a R12R22d 2+–()2d ⨯()/=,+=AN5802.2. Method 2—Phase-based Gesture SensingFor the second method of gesture sensing, the location of the target is never calculated. This means that Steps 1 and 2 from Method 1 above are not used in this process. This method involves looking solely at the raw data from the proximity measurements and looking for the timing of the changes in feedback for each LED. The maximum feedback point for each LED will occur when a hand is right above that LED. If a hand is swiped across two LEDs, the direction of the swipe can be determined by looking at which LED’s feedback raised first. Figure5 shows a three-LED system with a hand about to swipe over the system.Figure5.Swiping Left over a 3-LED SystemWhen the hand in Figure5 is swiped left across the three LEDs and proximity sensing device, the hand will first cross over D2, then D3, then D1. The sensing algorithm will recognize the rise in feedback for D2 and record the timestamp for this raise. Then the sensing algorithm will detect the same raises for D3 and D1 with a higher timestamp than the one before it. The sensing algorithm can also detect the return back to no-detect state of each LED’s measurement and record a timestamp for this as well. First D2 will return back to normal, then D3, then D1. For up and down gestures in the system in Figure5, D1 and D2 will rise and fall simultaneously with D3 coming either before or after D1/D2 for the up or down gesture. If all three channels rise and fall at the same time, then a hand approached from directly above (Z-axis) and was retracted to indicate a “select” gesture.In Figure6, the four gestures right, left, down, and up are shown on graphs of ADC Counts versus time. The green line represents PS measurements using D1, the pink line represents PS data from D2, and the yellow line shows data from D3. Observe for the Right Swipe that D1 spikes first, then D3, and finally D2. This is expected for a swipe from left to right. For the up and down swipes, D1 and D2 spike at the same time since your hand will cross these LEDs at the same time when swiping up or down.AN580Figure 6.Gesture Data Right SwipeLeft SwipeDown SwipeUp SwipeSi11xxD2D3D1D2D3D1D2D3D1D2D3D1D2D3D1AN5803. Position-based Method Advantages and DrawbacksThe advantage of the position-based method over phase-based is that the position-based method can offer information on the location of the target. This will allow for ratiometric control of systems. For example, to scroll through a book several pages you could suspend your hand over the right side of the detectable area instead of having to make several right swipe gestures.The main drawback of the position-based algorithm is the accuracy of the position calculations. The positioning algorithm assumes a spherical output from the LEDs, but in practice LED output is more conical than spherical. The algorithm also assumes uniform light intensity across the entire output of the LED, but the light intensity decays away from the normal. Another issue is that this algorithm does not account for the shape of the target. A target that is uniquely shaped will cause inconsistencies with the positioning output. For example, the system cannot tell the difference between the hand and the wrist, so any gestures involving movement that puts the wrist in the area of detection will be less accurately located.The result is that the positioning information provided in this algorithm is good enough for low resolution systems that only need a 3x3 grid of detection, but the current positioning algorithm is not well-suited for a pointing application. This algorithm’s output is not an ideal touchscreen replacement.4. Phase-based Method Advantages and DrawbacksFor applications not requiring position information, the phase-based method provides a very robust way of detecting gestures. Each gesture can be detected on either the entry or exit from the detectable area, and the entry and exit can be double-checked with each other to provide much higher certainty for each gesture observed.The drawback of this method when compared with the position-based method is that no positioning information is provided. This means that the number of gestures that can be implemented are more limited than the position-based method. The phase-based method can only tell the direction of entry and exit from the detectable area so any movement in the middle of the detectable area is not detected.5. Improved Gestures through Combination of the Two MethodsThese two methods can be implemented alongside one another to help mask the other’s deficiencies. The position-based algorithm can provide some positional information for ratiometric control, and the phase-based algorithm can be used for detection of most gestures. These two algorithms working together can provide a strong solution for gesture sensing, but the drawback here is the code space requirements of implementing two separate algorithms as well as the CPU cycles to process both algorithms at all times. Silicon Laboratories Inc.400 West Cesar ChavezAustin, TX 78701USASmart.Connected.Energy-Friendly .Products/products Quality /quality Support and Community DisclaimerSilicon Laboratories intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or intending to use the Silicon Laboratories products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical" parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Laboratories reserves the right to make changes without further notice and limitation to product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Silicon Laboratories shall have no liability for the consequences of use of the information supplied herein. This document does not imply or express copyright licenses granted hereunder to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any Life Support System without the specific written consent of Silicon Laboratories. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Laboratories products are not designed or authorized for military applications. Silicon Laboratories products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons.Trademark InformationSilicon Laboratories Inc.® , Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clockbuilder®, CMEMS®, DSPLL®, EFM®, EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® and others are trademarks or registered trademarks of Silicon Laborato-ries Inc. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. All other products or brand names mentioned herein are trademarks of their respective holders.。
西门子 SIWAREX U 设备手册说明书

SIWAREX® U设备手册版本:2007年12月用于订货号为7MH4950-1AA01和7MH4950-2AA01的模块警告和安全术语本手册包含有为了保护您的人身安全和防止损坏装置或周围环境而应该遵守的注意事项。
这些注意事项由一个警告三角形表示,根据不同的危险程度代表下列意义:危险意思是:如果未能认真遵守相应的安全预防措施,将肯定会导致严重的财产损失、严重的人身伤害、甚至死亡。
警告意思是:如果未能认真遵守相应的安全预防措施,将能够导致严重的财产损失、严重的人身伤害、甚至死亡。
小心意思是:如果未能认真遵守相应的安全预防措施,将可能导致财产损失或轻微的伤害。
小心意思是:如果未能认真遵守相应的安全预防措施,将可能导致财产损失。
注意指的是需要加以特别关注的重要信息;这些信息涉及到产品、产品的处置或资料中的一个对应段落。
合格人员装置的安装和操作只能由合格人员执行。
在本手册的范围内,从技术安全意义出发的合格人员指的是这样一些人:他有资格按照适用于技术安全标准,从事所有装置、系统和回路的安装、接地和标识工作。
警告本装置只能利用样本和技术描述中规定的替换件,而且只能利用由西门子公司批准或建议的外国或外部装置和部件。
产品的安全可靠、无故障的运行不仅取决于合适的运输,还依赖于合适的贮存、组装、安装、操作和维护。
产品牌号 / 商标SIWAREX®、SIMATIC®、SIMATIC HMI®和SIMATIC NET®都是西门子AG 公司的注意商标。
任何第三方为了个人目的而使用本文件中涉及商标的其它名称都将侵犯商标所有人的权利。
版权 © 西门子AG 2003;版权所有,不得翻印。
未经明确许可,严禁传播或复制本资料,严禁使用和披露本资料的内容。
违者应对相关损失承担法律责任。
保留所有权利,包括由一种实用新型或设计的专利许可或注册所形成的权利。
西门子(中国)有限公司上海浦东新区浦东大道1号船舶大厦7楼电话:(021)38892381传真:(021)38893264.免责声明我们已经校验了本手册中的内容与所述硬件和软件的一致性。
NexStar 4 60 80 114 系列望远镜完全远程控制说明书

Germany, April 20th 2003 Controlling the NexStar 4/60/80/114 Series Telescopes Fully Remotely Introduction:Remote controlling the little NexStar telescopes has been discussed in the NexStar Yahoo Group since their introduction approx. 3 years ago. The latest GT hand-controllers do actually allow to control the telescope via the RS232 port of a PC or a PDA. After an alignment of the telescope using the menus of the GT hand-controller you can activate the RS232 port and subsequently control the telescope using Goto commands. However you cannot fine tune the telescope remotely – you need to use the direction buttons of the hand-controller.Some testing and trials:Thus I started to debug the protocol between the hand-controller and the base of the telescope. However I did not fully decode it and only when Michael Ganslmeier stepped in we finally managed to fully understand the protocol and the functions. Meanwhile Michael Swanson gave valuable hints on how to mimic the direction buttons by changing the tracking rate of the telescopes. These hints were given for the new GPS series telescopes and can be found at/PCControl/NewGPSCommands.htm. We could finally adapt them also to the smaller NexStar telescopes.The solution:When bypassing the alignment of the GT hand-controller and fully remote control the telescope from a remote site we were facing the challenge of implementing the 2 star alignment or auto alignment on the PC. Being too lazy to work all this out Michael Ganslmeier and I finally managed to use the Celestron …GuideStar“ software and create a software plug-in to add the …direction button“ functionality. This means we use the …GuideStar“ software to align the telescope and also initiate Goto commands and have a small additional window with the directional buttons on the PC screen to fine tune the telescope (left-right-down-up). Thanks to Michael’s program “ArrowKeys4GS” it actually looks like it is all one piece of software. It runs under Windows 2000/XP, it is not working under Windows 98/ME.Unfortunately the original GT hand-controller cannot be used to apply our approach. Yet we can offer 3 solutions how to get there:1)If you have a HC hand-controller you are already there. Just use it and connect it to the PC by a RS232 cable.2)You can slightly modify your GT hand-controller. The modification does not affect the functionality using the hand-controller …stand alone“. Please note that after the modification the …normal“ remote control of the telescope by the RS232 port does no longer work because the protocol to be used is changed.3)You can build a small interface circuit and substitute the hand-controller completely. This circuit is connected to thebase unit instead of the hand-controller and connects the base unit directly to the PC.Subsequently you find explanations to the different hardware solutions including information to the RS232 cable as well as a description of how to install and operate the software.HC hand-controller:For some time Celestron sold the little NexStars as a low budget version with a …HC“ hand-controller instead as the …GT“ hand-controller. As far as I know only very few of them were sold in Europe but quite some of them in the US. Even more were sold under the TASCO brand name (models Starguide 60/80/114/4) and maybe you can get hold of a used one. As mentioned above, if you can get such a HC hand-controller you are set – no need for any modifications of the telescope. Below you find a picture with the HC hand-controller on the left and the GT hand-controller on the right side.Modification of a GT hand-controller:If you know how to use a soldering iron you should not have a problem to make the necessary changes inside your GT hand-controller. However be aware that you will definitely loose you warranty of the telescope! Essentially you only have to cut some traces on the PCB of the hand-controller and insert a switch with some wires (see the diagram below).After the modification you can switch between …stand alone mode“ of the telescope (i.e. you align and control it with the hand-controller) and …remote control mode“ (i.e. you can fully remote control the telescope with your PC). Below please find a picture with instructions for the modification. Please note the colours are:1=white(ws), 2=black(sw), 3=red(rt), 4=green (gn), 5=yellow(ge), 6=blue(bl)Finally please see 2 pictures of the hand-controller after the modification.By using a multi pole/through switch you should be able to modify the hand-controller also in a way, that you can switch between “original mode” and “new remote control mode”. However we have not yet verified this in hardware.Simple Interface Circuit:The third solution is a small electronic circuit you need to build. Below you find the schematic of a simple interface.No external power supply is needed, the circuit is powered by the base unit of the telescope. Because this interface does not provide true RS232 levels it may not work with some PCs. However from our experience it should work with most of them. We recommend putting the PCB in a small plastic casing to insulate and protect it.Cable between telescope and PC:The RS232 cable for connecting the telescope to the PC is the same for the NexStars 4/5/8/60/80/114. You can buy it at Celestron and their dealers. If you are fond of home-brewing you may build your own cable. The signals at the plug going into the NexStar hand-controller are shown below..A very comprehensive description can be downloaded from Mike Swanson’s NexStar resource site at/PCControl/RS232Cable.htm. He also offers a list of hints if you experience problems with the communication between the telescope and the PC at /PCControl/PCControlProblems.htm . How to install the software:The …GuideStar“ software was shipped for a while with the NexStar telescope but Celestron meanwhile ceased to distribute it. I got permission from Celestron to freely distribute the software and you can download it from my homepage http://www.dd1us.de. Please note, that you can download the software free of charge but Celestron Inc. continues to hold all rights of the software.The full software package is called “GuideStar_Setup.zip” and is 5.1MByte large. After downloading this .zip-file please unpack the installation program “GuideStar_Setup.exe” into an empty folder (e.g. c:\copybox). Next you start this instal-lation program to install the programs “GuideStar” and “ArrowKeys4GS” and the necessary auxiliary files. The default directory “c:\program files\GuideStar” must not be changed. If you have “GuideStar” already installed you need to down-load only the small file “ArrowKeys4GS_only.zip” from my homepage and unzip it to “c:\program files\GuideStar”.After the installation you can delete the file “GuideStar_setup.exe” in your temporary folder (e.g. c:\copybox\).Please do never move the files but leave them in the directory “c:\program files\GuideStar” even when installing the software “GuideStar 2.1” on a PC running a German version of Windows (probably every non-US revision). Furthermore you must not set the Windows PC's country settings to German (again non-US). When changing to English (USA) it seems to work fine. If the country settings are set to German the RA/DEC values from the window "change information" are wrong converted to the used RA/DEC values in the window "information". Another small “bug” we noticed testing“GuideStar” was the fact, that it is not completely removed out of memory when exiting the program. You can see this in the Windows task manager. However we have not noticed any problems associated with this behaviour.How to use the software:Now you can either start “GuideStar” and “ArrowKeys4GS” manually or just start the Batch file “GuideStar remote.bat” which you can find in the same directory and automates the launch of both programs together.Of course you have to configure the …GuideStar“ software when you use it first time. Simply go through the setup menu and enter your location, time zone incl. daylight savings status, comm port number of the PC and your telescope model.Once you saved these parameters they will be used as default for future alignments of the telescope. With the software using the time of the PC the alignments become thus very simple and fast. Next you need to align the telescope. The …GuideStar“ software offers the same auto-alignment procedure as the GT hand-controller but with an improved menu.After alignment you can use …GuideStar“ alone or the auxiliary program along with it. Below please find a screen shot of the …GuideStar“ program (right) and the small auxiliary program “ArrowKeys4GS” with the direction buttons (left).You can actually either use your mouse to click on the direction buttons or use the direction buttons on your keypad. Make sure numlock is deactivated. You can press two direction buttons simultaneously (e.g. right and up). With the slider “speed” in the “ArrowKeys4GS” window you can control the speed of the telescope. Once initiated a command from the program “ArrowKeys4GS” the program “GuideStar” is in a kind of hibernation mode (without loosing the alignment). However the tracking mode as defined in “GuideStar” is still active thus you can Goto an object, track it and center it with the direction buttons of the PC. If you want to send new commands from “GuideStar” (e.g. send a new Goto command or change the tracking mode) please first click on the button “GuideStar” in the window “ArrowKeys4GS” and then use the program …GuideStar“. The program …GuideStar“ offers quite some nice features – you should really give it a try. The next screenshots give you examples of the Goto menu as well as an information window for some of the objects.You can jump between both programs as often as you want. Please note that the two programs do communicate properly using Windows 2000 and XP, they are not working together using Windows 98 and ME. It looks like the used hibernation mode in …GuideStar“ cannot be used in some Windows versions, sorry! If you test it with other Windows versions we kindly ask you to share your experience with us and the other NexStar users.What’s missing?Now that you can control your telescope remotely you also want to watch the sky remotely. You can attach a web- or video-camera to your eyepiece/instead of your eyepiece. The live pictures can be transferred to a TV/video screen to watch it or to a frame grabber card in your PC for further processing. There are many nice programs available to process such signals like integrating, noise reduction, enhancements.What comes next?Well, of course we want to get rid of all the wires between the telescope and the PC. You can find an article on my webpage (http://www.dd1us.de) showing a 2.4 GHz radio link to transmit the video signal from the telescope to you. An RF link for the RS232 control signals is under investigation and will be published once we succeed ;-)Acknowledgement and Disclaimer:We cannot take any guarantee that the instructions and the software is error free. All modifications as well as the operation of the software are at your own risk.We want to thank Celestron for allowing us to offer the …GuideStar“ software download free of charge. Please note, that Celestron Inc. maintains all rights at the …GuideStar“ software. We think that this is a great gift from Celestron Inc. to the NexStar community.The auxiliary program is provided as …beerware“. You do not have to pay any money to us but should once pay a cold drink to one of the key contributors of the NexStar Yahoo Group (too many to name). If you are interested in the source code of the program “ArrowKeys4GS” you may send a request to the authors.For further information please first have a look at http://www.dd1us.de. The most recent versions and additional information are available there. We publish this information hoping it will help other users having even more fun with their NexStar telescopes. If you can give us additional information or have any questions please feel free to send an Email to Michael Ganslmeier (******************************) and/or Matthias Bopp (***************).Kind regardsMichael & Matthias。
西门子RUGGEDCOM RX1400多协议智能节点说明书

Multiprotocol intelligent nodeRUGGEDCOM RX1400BrochureEdition01/2015Siemens RUGGEDCOM RX1400 is a multiprotocol intelligent node which combines Ethernet switching, routing, and firewall functionality with various wide area connectivity options. The device has IP40 degree of protection, does not use internal fans for cooling and supports -40° C to +85° C extended temperature range.The RUGGEDCOM RX1400 provides a high level of immunity to electromagnetic interference, heavy electrical surges, extreme temperature and humidity for reliable operation in mission critical applications. It can be found in electric utility substations, traffic control cabinets, railways, oil and gas and other harsh environments.BenefitsCost effective solution for large scale deploymentsThe RUGGEDCOM RX1400 is a compact Layer 3 integrated switch and router – ideal for large scale, hierarchical networks, capable of transporting data from both modern Ethernet-based IEDs and from legacy or low cost serial IEDs. High availabilityThe RUGGEDCOM RX1400 uses fiber and cellular connections simultaneously. The dual SIM card slots enable cellular provider redundancy, allowing selection of the best performing network.Space saving installationThe RUGGEDCOM RX1400‘s small form factor allows it tofit into existing enclosures used in substation automation, distribution automation, roadside and oil & gas applications. Reduced maintenance costsThe RUGGEDCOM RX1400‘s rugged design will deliver the same high field demonstrated MTBFs as the rest of the RUGGEDCOM product portfolio, reducing truck rolls and maintenance costs.OverviewWireless2 x RS232 / 422 / 485Failsafe relay form Cm mLTE / HSPA / GPRSSerial 2 x RS 232/ 422/ 485Ethernet4 x 10/100 TXPluggable optics2 x SFP ports GigabitMemoryMicro SD slot for application data storageManagementLocal serial consoleCarrierDual SIM supportRelayFailsafe rel ay for m C Power supply 12 or 24 VDCGPSGPS input for location data88 mm150SoftwareThe RUGGEDCOM RX1400 runs the ROX II operating system and delivers carrier grade routing and switching performance to the network edge and beyond!The ROX firmware supports the most used network technologies, such as different routing protocols, multiple network fault recovery solutions, including Siemens eRSTP (enhanced Rapid Spanning Tree Protocol), and others. Software features◾Enhanced security / reliability through data and control path separation◾Single file configuration automation ensures easy installation and configuration control◾Automatic rollback in the event of configuration errors ◾NETCONF configuration interface supports powerful remote configuration and status features◾Port rate and Broadcast Storm Limiting◾Port configuration, status, statistics, mirroring◾Routing Protocols OSPF, BGP, RIPv1 and v2◾Virtual Router Redundancy Protocol (VRRP)◾NTP time synchronization (client and server)◾Redundancy protocols MSTP 802.1Q-2005, RSTP (802.1w) and Enhanced Rapid Spanning Tree (eRSTP) for network fault recovery◾Quality of service (802.1p) for real-time traffic Cyber securityCyber security is an important issue in many industries where advanced automation and communications networks play a crucial role in mission critical applications and where high reliability is of paramount importance. Key RUGGEDCOM RX1400 features that address security issues at the local area network level include:◾IPSEC – The integrated hardware encryption engine delivers high performance IPSEC traffic without using the main processor◾Passwords – compliant with NERC guidelines including provision for RADIUS based authentication◾SSH / SSL – extends capability of password protection to add encryption of passwords and data as they cross the network◾Enable / disable ports – capability to disable ports so unauthorized devices can’t connect to unused ports◾802.1Q VLAN – provides the ability to logically segregate traffic between predefined ports on switches◾SNMPv3 – encrypted authentication and access security ◾HTTPS – for secure access to the web interface◾802.1x – to ensure only permitted devices can connect to the device◾MAC access list – control access to devices that do not support RADIUSFeaturesRugged RatedThe RUGGEDCOM RX1400 is a Rugged Rated product, which means that it has been specifically designedand tested to withstand the demands of harsh environments. As with all Rugged Rated products, Highly Accelerated Life Testing (HALT) has been used in the early stages of product development – to detect any design and performance issues.Reliable operation in harsh electrical environments◾IEC 61850-3 and IEEE 1613 (electric power substations)◾IEC 61000-6-2 and IEC 61800-3 (industrialenvironments)◾NEMA TS-2 (traffic control equipment)◾EN 50121-4 (railway applications)Error-free operation in high EMI environments◾Z ero-Packet-Loss technology for fiber-based networking devices◾IEEE 1613 class 2 error-free performance under EMI stress ◾Fiber optic ports supporting both short and long haul fiber Operation over a wide temperature range ◾-40° C to +85° C◾Passive cooling – no fans◾CSA/UL 60950 safety approved to +85° C High availability◾Integrated power supply◾L ow voltage DC: 24 VDC (10-36 VDC) Industrial installations◾Full metal enclosure◾Heavy duty mounting◾I ndustrial terminal blocks for powerand I/O connectionsThe RUGGEDCOM RX1400 provides redundant connection of end devices by fiber optic and / or cellular networks for more reliability in case of network failure.Wayside infrastructureUse casesThe RUGGEDCOM RX1400 can be used to connect low voltage substations and distributed generation plants reliably via public celullar networks.Distribution generationOil and gasThe RUGGEDCOM RX1400 makes it possible to remotely monitor field data using multiple kinds of communications through cellular networks, or fiber optics, or both in a redundant way.Order optionsSiemens AGProcess Industries and Drives Process Automation Postfach 48 4890026 NÜRNBERG GERMANYSiemens Canada Limited 300 Applewood Crescent Concord, Ontario, L4K 5C7 CANADA Subject to change without prior notice Article No. 6ZB5531-0AL02-0BA0 DR.PN.RG.15.XXBR.95.26 / Dispo 26000 BR 0115 2. WÜ 8 EnPrinted in Germany© Siemens AG 2015The information provided in this brochure contains descriptions or characteristics of performance which in case of actual use do not always apply as described or which may change as a result of further development of the products. An obligation to provide the respective characteristics shall only exist if expressly agreed in the terms of contract. Availability and technical specifications are subject to change without notice.All product designations may be trademarks or product namesof Siemens AG or supplier companies whose use by third parties for their own purposes could violate the rights of the owners.。
Si4438中文数据手册
修订版 1.0 版权所有 © 2014 Silicon LaboratoriesSi4438-C特点应用说明Silicon Laboratories 的Si4438为高性能的低电流收发器,可覆盖从425至 525MHz 的次千兆赫频段。
Si4438 针对中国智能仪表市场,特别适合于智能电表。
该设备的覆盖区及引脚与 Si446x 无线电兼容,可为全世界的次千兆赫应用提供行业领先的性能。
无线电设备是 EZRadioPRO ®产品系列的一部分,包括全套发射器、接收器和收发器的产品线,涵盖各种应用。
所有零件都具有杰出的灵敏度—124dBm ,可同时实现极低的有效电流和待机电流消耗。
12.5kHz 通道 58dB 相邻通道选择性的间距确保了严苛 RF 条件下的可靠接收操作。
Si4438 可提供超常的高达 +20dBm 具有显著 TX 效率的输出功率。
高输出功率和灵敏度实现了业界领先的144dB 链路预算,实现了范围扩展和高度可靠的通信链路。
⏹频率范围=425–525MHz ⏹接收灵敏度=–124dBm ⏹调制● (G)FSK ● OOK⏹最大输出功率● +20dBm⏹低活动功耗● 14mA RX⏹超低电流断电模式● 30nA 关机,40nA 待机⏹数据传输率=100 bps 到 500kbps⏹前导探测模式● 6在 1.2kbps 时 mA 平均 Rx 电流⏹快速唤醒和跳数⏹电源=1.8 至 3.8V⏹出色的选择性能● 58dB 相邻通道● 1MHz 处阻断增益为 75dB⏹天线分集和 T/R 开关控制⏹高度可配置的分组处理程序⏹TX 和 RX64 字节 FIFO⏹自动频率控制 (AFC)⏹自动增益控制 (AGC)⏹低 BOM⏹低电量探测器⏹温度传感器⏹20 引脚 QFN 封装⏹IEEE 802.15.4g 就绪⏹适合中国调控(国家电网)⏹中国智能仪表专利申请中Si4438-C功能框图Product Freq. Range Max Output Power TX Current RX Current Si4438425–525MHz+20dBm75mA13.7mASi4438-C修订版 1.03目录章节页码1. 电气规格 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42. 功能描述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113. 控制器接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123.1. 串行外围接口 (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123.2. 快速响应寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143.3. 工作模式和计时 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143.4. 应用程序编程接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183.5. 中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183.6. GPIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184. 调制和硬件配置选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.1. 调制类型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.2. 硬件配置选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194.3. 前导长度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215. 内部功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.1. RX 链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.2. RX 调制解调器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235.3. 合成器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .255.4. 发送器(TX ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .275.5. 晶体振荡器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .296. 数据处理和分组处理程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316.1. RX 和 TX FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316.2. 分组处理程序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .327. RX 调制解调器配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338. 辅助块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.1. 唤醒定时器和 32kHz 时钟源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.2. 低占空比模式(自动 RX 唤醒) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .338.3. 温度、电池电压和辅助 ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .348.4. 低电量探测器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .358.5. 天线分集 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .358.6. 前导探测模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .359. 引脚描述:Si4438-C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3710. 订购信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3911. 封装外形:Si4438 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4012. PCB 焊盘图案:Si4438 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4113. 顶部标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4313.1. Si4438 顶部标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4313.2. 顶部标记说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43联系信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44Si4438-C1. 电气规格Table 1. DC Characteristics *Parameter Symbol Test ConditionMin Typ Max Unit Supply Voltage RangeV DD 1.8 3.3 3.8V Power Saving ModesI Shutdown RC Oscillator, Main Digital Regulator, and Low Power Digital Regulator OFF —30—nA I Standby Register values maintained and RCoscillator/WUT OFF —40—nA I SleepRC RC Oscillator/WUT ON and all register valuesmaintained, and all other blocks OFF —740—nA I SleepXO Sleep current using an external 32kHz crystal.— 1.7—µA I Sensor -LBD Low battery detector ON, register values maintained, and all other blocks OFF —1—µA I ReadyCrystal Oscillator and Main Digital Regulator ON,all other blocks OFF— 1.8—mA Preamble Sense Mode CurrentI psm Duty cycling during preamble search,1.2kbps, 4 byte preamble —6—mA I psmFixed 1s wakeup interval, 50kbps, 5 bytepreamble—10—µA TUNE Mode Current I Tune_RX RX Tune —7.6—mA I Tune_TX TX Tune —7.8—mA RX Mode Current I RXH —13.7—mA TX Mode Current (Si4438)I TX_+20+20dBm output power, class-E match, 490MHz,3.3V—75—mA*Note: All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltageand from –40 to +85°C unless otherwise stated. All typical values apply at VDD =3.3V and 25°C unless otherwise stated.Si4438-CTable 2. Synthesizer AC Electrical Characteristics1Parameter Symbol Test Condition Min Typ Max UnitF SYN425—525MHz Synthesizer FrequencyRange (Si4438)F RES-525425–525MHz—14.3—Hz Synthesizer FrequencyResolution2—50—µs Synthesizer Settling Time t LOCK Measured from exiting Ready mode withXOSC running to any frequency.Including VCO Calibration.Phase Noise Lφ(f M)∆F=10kHz, 460MHz—–109—dBc/Hz∆F=100kHz, 460MHz—–111—dBc/Hz∆F=1MHz, 460MHz—–131—dBc/Hz∆F=10MHz, 460MHz—–141—dBc/HzNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD=3.3V and 25°C unless otherwise stated.2. Default API setting for modulation deviation resolution is double the typical value specified.Si4438-CTable 3. Receiver AC Electrical Characteristics 1ParameterSymbol Test ConditionMin Typ Max Unit RX Frequency Range (Si4438)F RX 425—525MHz RX Sensitivity 2P RX_0.5(BER < 0.1%)(500bps, GFSK, BT =0.5,∆f =±250Hz)2—–124—dBmP RX_40(BER < 0.1%)(40kbps, GFSK, BT =0.5,∆f =±20kHz)2—–108—dBmP RX_100(BER < 0.1%)(100kbps, GFSK, BT =0.5,∆f =±50kHz)1—–104—dBmP RX_9.6(BER < 0.1%)(9.6kbps, GFSK, BT =0.5,∆f =±4.8kHz)2—–114—dBmP RX_OOK(BER < 0.1%, 4.8kbps, 350kHz BW,OOK, PN15 data)2—–108—dBm (BER < 0.1%, 40kbps, 350kHz BW,OOK, PN15 data)2—–102—dBm (BER < 0.1%, 120kbps, 350kHz BW,OOK, PN15 data)2—–98—dBm RX Channel Bandwidth BW 1.1—850kHz RSSI Resolution RES RSSI —±0.5—dB ±1-Ch Offset Selectivity, 450MHz 2C/I 1-CHDesired Ref Signal 3dB above sensitivity, BER < 0.1%. Interferer is CW, and desired is modulated with2.4kbps∆F =1.2kHz GFSK with BT =0.5, RXchannel BW =4.8kHz, channel spacing =12.5kHz —–60—dBBlocking 1MHz Offset 21M BLOCK Desired Ref Signal 3dB above sensitivity, BER =0.1%. Interferer is CW, and desired is modulated with2.4kbps,∆F =1.2kHz GFSK with BT =0.5,RX channel BW =4.8kHz —–77—dB Blocking 8MHz Offset 28M BLOCK—–84—dBImage RejectionIm REJRejection at the image frequency.IF =468kHz—40—dBNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD =3.3V and 25°C unless otherwise stated.2. Measured over 50000 bits using PN9 data sequence and data and clock on GPIOs. Sensitivity is expected to be betterif reading data from packet handler FIFO especially at higher data rates.Si4438-CTable 4. Transmitter AC Electrical Characteristics1Parameter Symbol Test Condition Min Typ Max Unit TX FrequencyRangeF TX425—525MHz(G)FSK Data Rate2DR FSK0.1—500kbps OOK Data Rate2DR OOK0.1—120kbps Modulation DeviationRange∆f525425–525MHz—750—kHz Modulation DeviationResolution3F RES-525425–525MHz—14.3—HzOutput Power Range4P TXTypical range at 3.3Vwith class E match optimized for bestPA efficiency.–20—+20dBmTX RF Output Steps∆PRF_OUT Using Class E match within 6dB of maxpower—0.25—dBTX RF Output LevelVariation vs. Temperature∆P RF_TEMP–40 to +85︒C— 2.3—dB TX RF Output LevelVariation vs. Frequency∆P RF_FREQ—0.6—dBTransmit ModulationFiltering B*T Gaussian Filtering Bandwith TimeProduct—0.5—Notes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at VDD=3.3V and 25 °C unless otherwise stated.2. The maximum data rate is dependent on the XTAL frequency and is calculated as per the formula:Maximum Symbol Rate=Fxtal/60, where Fxtal is the XTAL frequency (typically 30MHz).3. Default API setting for modulation deviation resolution is double the typical value specified.4. Output power is dependent on matching components and board layout.Si4438-CTable 5. Auxiliary Block Specifications 1ParameterSymbol Test ConditionMin Typ Max Unit Temperature Sensor SensitivityTS S—4.5—ADC Codes/°C Low Battery Detector ResolutionLBD RES —50—mV Microcontroller ClockOutput Frequency Range 2F MCConfigurable to Fxtal or Fxtal divided by 2, 3, 7.5, 10, 15, or 30 where Fxtal is the reference XTAL frequency. In addition, 32.768kHz is also supported.32.768K—FxtalHzTemperature Sensor Conversion TEMP CT Programmable setting—3—ms XTAL Range 3XTAL Range25—32MHz 30MHz XTAL Start-Up Timet 30MUsing XTAL and board layout in reference design. Start-up time will vary with XTAL type andboard layout.—300—µs30MHz XTAL Cap Resolution30M RES —70—fF 32kHz XTAL Start-Up Time t 32k —2—sec 32kHz Accuracy using Internal RC Oscillator 32KRC RES—2500—ppm POR Reset Timet POR——6msNotes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltage andfrom –40 to +85°C unless otherwise stated. All typical values apply at V DD =3.3V and 25°C unless otherwise stated.2. Microcontroller clock frequency tested in production at 1MHz, 30MHz, 32MHz, and 32.768kHz. Other frequenciestested in bench characterization.3. XTAL Range tested in production using an external clock source (similar to using a TCXO).Si4438-CTable 6. Digital IO Specifications (GPIO_x, SCLK, SDO, SDI, nSEL, nIRQ, SDN)1Parameter Symbol Test Condition Min Typ Max Unit Rise Time2,3T RISE0.1x V DD to 0.9x V DD,C L=10pF,DRV<1:0>=LL— 2.3—nsFall Time3,4T FALL0.9x V DD to 0.1x V DD,C L=10pF,DRV<1:0>=LL—2—nsInput Capacitance C IN—2—pF Logic High Level Input Voltage V IH V DD x0.7——V Logic Low Level Input Voltage V IL——V DD x0.3V Input Current I IN0<V IN< V DD–1—1µA Input Current If Pullup is Activated I INP V IL=0V1—4µADrive Strength for Output Low Level I OmaxLL DRV[1:0]=LL3— 6.66—mA I OmaxLH DRV[1:0]=LH3— 5.03—mA I OmaxHL DRV[1:0]=HL3— 3.16—mA I OmaxHH DRV[1:0]=HH3— 1.13—mADrive Strength for Output High Level I OmaxLL DRV[1:0]=LL3— 5.75—mA I OmaxLH DRV[1:0]=LH3— 4.37—mA I OmaxHL DRV[1:0]=HL3— 2.73—mA I OmaxHH DRV[1:0]=HH3—0.96—mADrive Strength for Output High Level for GPIO0I OmaxLL DRV[1:0]=LL3— 2.53—mA I OmaxLH DRV[1:0]=LH3— 2.21—mA I OmaxHL DRV[1:0]=HL3— 1.7—mA I OmaxHH DRV[1:0]=HH3—0.80—mALogic High Level Output Voltage V OH DRV[1:0]=HL V DD x0.8——V Logic Low Level Output Voltage V OL DRV[1:0]=HL——V DD x0.2V Notes:1.All minimum and maximum values are guaranteed across the recommended operating conditions of supply voltageand from –40 to +85°C unless otherwise stated. All typical values apply at V DD=3.3V and 25°C unless otherwise stated.2. 6.7ns is typical for GPIO0 rise time.3. Assuming VDD=3.3V, drive strength is specified at Voh (min)=2.64V and Vol(max)=0.66V at room temperature.4. 2.4ns is typical for GPIO0 fall time.Si4438-CTable 7. Thermal Operating CharacteristicsParameterValue Unit Operating Ambient Temperature Range T A –40 to +85︒C Thermal Impedance θJA 25︒C /W Junction Temperature T JMAX +105︒C Storage Temperature Range T STG–55 to +150︒CTable 8. Absolute Maximum Ratings*ParameterValue Unit V DD to GND–0.3, +3.8V Instantaneous V RF-peak to GND on TX Output Pin –0.3, +8.0V Sustained V RF-peak to GND on TX Output Pin –0.3, +6.5V Voltage on Digital Control Inputs –0.3, V DD + 0.3 V Voltage on Analog Inputs–0.3, V DD + 0.3V Voltage on XIN Input when using a TCXO –0.7, V DD + 0.3V RX Input Power+10dBm*Note: Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. Theseare stress ratings only and functional operation of the device at or beyond these ratings in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability. Power Amplifier may be damaged if switched on without proper load or termination connected. TX matching network design will influence TX V RF-peak on TX output pin. Caution: ESD sensitive device.2. 功能描述Si4438 设备为高性能低电流的无线 ISM 收发器,可覆盖次千兆赫波段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
说明
阀门控制 烟雾探测器 非接触开关 非接触滑动器 占位传感器 消费类电子设备 工业自动化 显示屏背光控制 光中断器
Si1141/42/43 是基于反射的低功率红外线临近和环境光传感器,带有 I2C 数字接口和 可编程事件中断输出。此非接触传感器 IC 包括模拟到数字转换器、集成高灵敏度可 见和红外线光电二极管 、数字信号处理器和具有十五个可选驱动电平的一个、两个或 三个集成红外线 LED 驱动器。Si1141/42/43 在广泛的动态范围和包括阳光直射在内 的各种光源下可提供优异性能。Si1141/42/43 还可以在深色玻璃盖下工作。光电二极 管响应和关联的数字转换电路对人造光闪烁噪声和自然光颤动噪声具有优异的抗扰 性。Si1142/43 具有两个或多个 LED,能够支持多轴式临近运动探测。Si1141/42/43 器件 在 10 引 线 2x2 mm QFN 封装 中提 供,能够 在 –40 至 +85 °C 温 度 范围 中在 1.71 至 3.6 V 的条件下运行。
Regulator
Temp A M U
Visible
X
Infrared
ADC
Filter
LED Drivers
Digital Sequencer & Control Logic
I2C
Registers
Oscillator
LED1 LED21 LED32
GND
1. Si1142 and Si1143 only. 2. Si1143 only.
每个 LED 驱动器有 15 个电流 设置,从 5.6 mA 到 360 mA
25.6 µs LED 驱动器脉冲宽度 50 cm 临近范围,具有单个脉冲
(<3 klx)
扰度 业界最低的功耗
1.71 至 3.6 V 电源电压 9 µA 平均电流 (180 mA 和 3 µA
Si114x 电源时每 800 ms LED 脉冲
Pin Assignments
SDA SCL VDD INT
DNC
10
1
9
2
8
QFN-10
3
7
4
6
5
DNC
LED1 GND LED3 LED2
Rev. 1.3 5/12
版权 © 2011 Silicon Laboratories
Si1141/42/43
Si1141/42/43
功能框图
VDD
INT SCL SDA
在两个 ADC 范围设置之间动态 范围可以达到 1 至 128 klx
内置电压电源监控器和接通电源复 位控制器
串行通信 数据速率高达 3.4 Mbps
从模式硬件地址解码 小外形 10 引线 2x2 mm QFN 温度范围
–40 至 +85 °C
应用
手机 电子书阅读器 笔记本 / 上网本 便携式消费类电子设备 音频产品 安全面板 窜改探测电路 分配器
4. 编程指南 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 4.1. 命令和响应结构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 4.2. 命令协议 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 4.3. 资源汇总 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 4.4. 信号通路软件模型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 4.5. I2C 寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 4.6. 参数 RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3 V
Host SDA SCL
INT
0.1 uF
Si1141
SDA
LED1
SCL
GND
VDD CVDD
INT CVDD
30 ohm 5%, 1/16 W
15 µF, 20%, >6 V
3.3 V Host
Figure 1. Si1141 Basic Application
4.3 V
No Pop
Si1143
SDA
LED1
SCL
GND
VDD
LED3
INT
LED2
0.1 uF
30 ohm 5%, 1/16 W
22 uF, 20%, >6V
Figure 2. Si1143 Application with Three LEDs and Separate LED Power Supply
注: 有关更多的应用示例,请参阅 “AN498:Si114x 临近应用的 irLED 选择指南 ”。
Si1141/42/43
带 I2C 接口的临近 / 环境光传感器 IC
功能
QuickSense™ 集成红外线临近探测器 使用红外校正算法可以准确测量照
临近探测可从 1 cm 以下调节到超过
明度
50 cm
25.6µs LED “ 开启 ” 时间使总功
三个独立的 LED 驱动器
耗占空比较低,不会影响性能和抗
3. 运行模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.1. 关闭模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.2. 初始化模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.3. 备用模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.4. 强制转换模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.5. 自发运行模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
15 cm 临近范围,具有单个脉冲 (>3 klx)
25.6 µs) < 500 nA 待机电流
运行时高达 128 klx (阳光直射)
支持内部和外部唤醒
高反射灵敏度 < 1 µW/cm2
高电磁抗扰性,无屏蔽封装 QuickSense™ 集成环境光传感器