计算机自动控制与MATLAB实现的研究
PID控制算法及MATLAB仿真分析

题目:以PID控制进行系统仿真学院自动化学院专业班级工业自动化111班学生姓名黄熙晴目录1 引言 (1)1.1本论文研究内容 (1)2 PID控制算法 (1)2.1模拟PID控制算法 (1)2.2数字式PID控制算法 (3)2.3PID控制算法的改进 (5)2.3.1微分项的改进 (5)2.3.2积分项的改进 (9)2.4模糊PID控制算法 (11)2.4.1模糊推理的系统结构 (12)2.4.2 PID参数在线整定原则 (12)2.5PID控制器研究面临的主要问题 .................................. 错误!未定义书签。
3 MATLAB编程和仿真 (13)3.1PID控制算法分析 (13)3.2MATLAB仿真 (15)4结语 (20)参考文献...................................................................................... 错误!未定义书签。
1 引言PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
光学表面等离子共振生物传感技术受温度影响很大,因此设计高精度的温度控制器对于生物分析仪十分重要。
研究PID的控制算法是PID控制器整定参数优化和设定的关键技术之一。
在工业过程控制中,目前采用最多的控制方式依然是PID方式。
它具有容易实现、控制效果好、鲁棒性强等特点,同时它原理简单,参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
在实际的应用中,许多被控过程机理复杂,具有高度非线性、时变不确定性和纯滞后等特点,特别是在噪声、负载扰动等因素的影响下,参数复杂烦琐的整定过程一直困扰着工程技术人员。
为了减少参数整定的工作量,克服因环境变化或扰动作用造成系统性能的降低,就要提出一种PID控制参数的自动整定。
1.2本论文研究内容本文在介绍传统的PID控制算法,并对传统算法改进后,在学习的基础上提出一种模糊参数自整定方法,这种模糊控制的PID算法必须精确地确定对象模型。
matlab课程设计自动控制原理

matlab课程设计自动控制原理一、教学目标本课程的目标是使学生掌握自动控制原理的基本概念和MATLAB在自动控制领域的应用。
通过本课程的学习,学生应能理解自动控制系统的组成、工作原理和设计方法,熟练运用MATLAB进行自动控制系统的分析和仿真。
知识目标:学生通过本课程的学习,应掌握自动控制基本理论、MATLAB基本操作和自动控制系统仿真方法。
技能目标:学生应能熟练使用MATLAB进行自动控制系统的建模、仿真和分析,具备一定的实际问题解决能力。
情感态度价值观目标:培养学生对自动控制技术的兴趣和热情,提高学生运用现代技术手段进行科学研究的能力,培养学生的创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括自动控制原理的基本概念、MATLAB的基本操作和自动控制系统的仿真方法。
1.自动控制原理:包括自动控制系统的组成、数学模型、稳定性分析、控制器设计和校正方法等。
2.MATLAB基本操作:包括MATLAB的安装和启动、变量和数据类型、矩阵运算、编程和函数的使用等。
3.自动控制系统仿真:包括MATLAB仿真环境的设置、Simulink的介绍和应用、控制系统仿真的方法和步骤等。
三、教学方法本课程采用讲授法、案例分析法和实验法相结合的教学方法。
1.讲授法:通过教师的讲解,使学生掌握自动控制原理的基本概念和MATLAB的基本操作。
2.案例分析法:通过分析实际案例,使学生理解和掌握自动控制系统的建模和仿真方法。
3.实验法:通过上机实验,使学生熟练掌握MATLAB自动控制系统仿真工具的使用,提高学生的实际操作能力。
四、教学资源本课程的教学资源包括教材、多媒体资料和实验室设备。
1.教材:选用《自动控制原理》和《MATLAB基础教程》作为主要教材,为学生提供系统的理论知识和实践指导。
2.多媒体资料:制作课件、教学视频等,以图文并茂的形式展示自动控制原理和MATLAB的操作方法。
3.实验室设备:提供计算机和MATLAB软件,供学生进行自动控制系统的仿真实验。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
自动控制原理实验
自动控制原理实验实验一 控制系统的数学模型一、 实验目的1. 熟悉Matlab 的实验环境,掌握Matlab 建立系统数学模型的方法。
2. 学习构成典型环节的模拟电路并掌握典型环节的软件仿真方法。
3. 学习由阶跃响应计算典型环节的传递函数。
二、 实验内容1. 已知图1.1中()G s 和()H s 两方框相对应的微分方程分别是:()610()20()()205()10()dc t c t e t dtdb t b t c t dt+=+=且满足零初始条件,用Matlab 求传递函数()()C s R s 和()()E s R s 。
图1.1 系统结构图2. 构成比例环节、惯性环节、积分环节、比例-积分环节、比例-微分环节和比例-积分-微分环节的模拟电路并用Matlab 仿真;3. 求以上各个环节的单位阶跃响应。
三、 实验原理1. 构成比例环节的模拟电路如图1.2所示,该电路的传递函数为:21().R G s R =-图1.2 比例环节的模拟电路原理图2. 构成惯性环节的模拟电路如图1.3所示,该电路的传递函数为:221(),,.1R KG s K T R C Ts R =-==+图1.2 惯性环节的模拟电路原理图3. 构成积分环节的模拟电路如图1.3所示,该电路的传递函数为:1(),.G s T RC Ts==图1.3 积分环节的模拟电路原理图4. 构成比例-积分环节的模拟电路如图1.4所示,该电路的传递函数为:2211()1,,.R G s K K T R C Ts R ⎛⎫=-+== ⎪⎝⎭图1.4 比例-积分环节的模拟电路原理图5. 构成比例-微分环节的模拟电路如图1.5所示,该电路的传递函数为:221()(1),,.R G s K Ts K T R C R =-+==图1.5 比例-微分环节的模拟电路原理图6. 构成比例-积分-微分环节的模拟电路如图1.6所示,该电路的传递函数为:121211212121121()1(1)()()()()()p d i f p i i ff i f f f f f d f f G s K T s T s R R R R C K R R C T R CT R R C R R C R R R R R R CC T R R C R R C⎛⎫=++ ⎪⎝⎭++=+==+++++=+++图1.6 比例-积分-微分环节的模拟电路原理图四、实验要求1.画出各环节的模拟电路图。
基于MATLAB仿真的机器人运动学建模及控制技术研究

基于MATLAB仿真的机器人运动学建模及控制技术研究机器人的普及与应用越来越广泛,成为了工业自动化的重要组成部分。
但是,如何对机器人进行运动学建模与控制是机器人研究的重要问题之一。
近年来,由于计算机技术的发展,基于MATLAB仿真的机器人运动学建模及控制技术研究得到了广泛应用。
本文将对此方面的研究进行探讨。
一、机器人运动学建模机器人的运动学建模是指利用几何学和代数学知识来描述机器人的运动规律,从而实现机器人的运动控制。
根据机器人的类型,可以采用不同的方法进行运动学建模。
1、串联机器人的运动学建模串联机器人指的是由各种关节通过齿轮、链条等联接的机器人。
其运动学建模主要是研究各关节的角度、速度、加速度等变量与末端执行器之间的关系,从而实现机器人的控制。
这种建模的方法主要基于牛顿-欧拉方法,可以通过MATLAB中的符号化计算实现。
首先,需要对各个关节进行标号,并定义每个关节和基座之间的距离和角度。
然后,可以运用牛顿-欧拉方法来用关节运动学参数表示末端执行器的位置和姿态变量。
最后,通过控制关节运动学参数来控制机器人的运动。
2、并联机器人的运动学建模并联机器人由多个平台和机械臂组成,并联机器人可以同时控制多个执行器,从而实现更高效的工作。
并联机器人的运动学建模主要是研究机器人末端执行器的位置和姿态变量与各个执行器之间的关系。
建模方法主要包括支点变换法和雅可比矩阵法。
其中支点变换法是将并联机器人转化为串联机器人的形式,然后用串联机器人的运动学进行建模。
而雅可比矩阵法则是运用雅可比矩阵来建立机器人末端执行器的运动学模型,从而实现机器人的控制。
二、机器人运动控制机器人运动控制是指根据机器人的运动学模型,利用控制算法控制机器人的运动状态和轨迹。
在控制机器人的运动过程中,主要的控制方法包括开环控制、PID 控制和反馈控制等。
1、开环控制开环控制是一种简单的控制方法,即在机器人刚开始运动时就预设好机器人的运动轨迹和速度。
自动控制原理实验指导书(11.09版)
河南机电高等专科学校《自动控制原理》实验指导书专业:电气自动化技术、计算机控制技术生产过程自动化技术等吴君晓编2008年9月目录实验一 (2)实验二 (4)实验三 (6)实验四 (8)实验五 (10)实验六 (12)实验七 (14)实验八 (15)实验九 (17)实验一建立MATLAB环境下控制系统数学模型一. 实验目的1.熟悉MATLAB实验环境,掌握MATLAB命令窗口的基本操作。
2.掌握MATLAB建立控制系统数学模型的命令及模型相互转换的方法。
3.掌握使用MATLAB命令化简模型基本连接的方法。
二、实验设备和仪器1.计算机2. MATLAB软件三、实验原理控制系统常用的数学模型有四种:传递函数模型(tf对象)、零极点增益模型(zpk对象)、结构框图模型和状态空间模型(ss对象)。
经典控制理论中数学模型一般使用前三种模型,状态空间模型属于现代控制理论范畴。
1.传递函数模型(也称为多项式模型)连续系统的传递函数模型为:在MATLAB中用分子、分母多项式系数按s的降幂次序构成两个向量:num = [ b0 , b1 ,…, bm ] ,den = [ a0 , a1 ,…, an]。
用函数tf ( )来建立控制系统的传递函数模型,其命令调用格式为:G = tf ( num , den )注意:对于已知的多项式模型传递函数,其分子、分母多项式系数两个向量可分别用G.num{1}与G.den{1}命令求出。
2.零极点增益模型零极点模型是是分别对原传递函数的分子、分母进行因式分解,以获得系统的零点和极点的表示形式。
式中,K为系统增益,z1,z2,…,z m为系统零点,p1,p2,…,p n为系统极点。
在MATLAB 中,用向量z,p,k构成矢量组[ z, p, k ]表示系统。
即z = [ z1, z2 ,…,z m ],p = [ p1, p2,…, p n ],k = [ k ],用函数命令zpk ( )来建立系统的零极点增益模型,其函数调用格式为:G = zpk ( z, p, k )3.控制系统模型间的相互转换零极点模型转换为多项式模型: G=zpk(G)多项式模型转化为零极点模型: G=tf(G)4.系统反馈连接之后的等效传递函数两个环节反馈连接后,其等效传递函数可用feedback ( )函数求得。
Matlab在智能控制与自动化系统中的应用案例
Matlab在智能控制与自动化系统中的应用案例智能控制与自动化系统是当今科技领域的热门话题,它涉及到诸多领域,如机器学习、人工智能、机器视觉等。
而Matlab作为一种功能强大的编程语言和软件工具,被广泛应用于智能控制与自动化系统中。
本文将探讨Matlab在该领域中的应用案例,并分析其在实际系统中的作用。
一、机器学习机器学习是智能控制与自动化系统中不可或缺的一部分。
通过机器学习算法,系统可以根据大量的数据进行学习和预测,从而实现自动化控制。
Matlab提供了丰富的机器学习工具和函数,极大地简化了机器学习的实现过程。
以图像识别为例,在智能控制与自动化领域,图像识别广泛应用于人脸识别、物体检测等场景。
Matlab中的图像处理工具箱提供了多种图像特征提取、分类和识别的算法,方便了图像识别的实现。
通过Matlab,可以使用深度学习库来实现卷积神经网络(CNN),从而提高图像识别的精确度和效率。
二、控制系统设计控制系统设计是智能控制与自动化系统中的核心任务。
Matlab提供了丰富的工具箱和函数,支持不同领域的控制系统设计,如PID控制、模糊控制、自适应控制等。
以PID控制为例,PID是一种经典的控制算法,在许多自动化系统中得到广泛应用。
Matlab中的控制系统工具箱可以帮助工程师快速设计和调整PID控制器参数,并通过仿真验证控制效果。
此外,Matlab还提供了优化工具箱,可以根据系统的性能指标,自动优化控制器参数,从而进一步提高控制系统的性能。
三、机器视觉机器视觉是智能控制与自动化系统中的另一个重要领域。
它通过图像和视频数据,实现对现实世界的理解和感知。
Matlab提供了强大的图像处理和计算机视觉工具箱,可以帮助开发人员快速实现各种机器视觉应用。
在工业自动化领域,机器视觉可以用于检测和识别产品缺陷,提高生产线的质量和效率。
通过Matlab,可以利用图像处理和模式识别算法,实现对产品的自动检测和分类。
此外,Matlab的计算机视觉工具箱还提供了特征提取和目标跟踪等功能,可用于实现自动导航和无人车等应用。
现代控制系统分析与设计——基于matlab的仿真与实现

现代控制系统分析与设计——基于matlab的仿真与实现随着现代科技的不断发展,越来越多的技术应用到现代控制系统中,而控制系统的分析与设计更是一项复杂的技术。
为了更好地实现现代控制系统的分析与设计,计算机技术尤其是基于Matlab的计算机仿真技术在现代控制系统分析与设计中已发挥着越来越重要的作用。
本文旨在介绍基于Matlab的仿真技术,总结它在现代控制系统分析与设计中的应用,为研究者们提供一个思考Matlab技术在现代控制系统分析与设计中的可能性的契机。
Matlab是当今流行的科学计算软件,它的设计特别适合进行矩阵运算和信号处理等工作,可以有效地处理大量复杂的数字信息,因此成为现代计算机技术应用于控制系统分析和设计的重要工具。
基于Matlab的仿真技术主要用于建立控制系统的动态模型,分析系统的特性,评估系统的性能,模拟系统的行为,确定系统的参数,优化系统的性能。
基于Matlab的仿真技术已被广泛应用于现代控制系统的设计中。
首先,基于Matlab的仿真技术可以有效地提高系统设计的效率。
通过实现对控制系统的动态模型建模,可以快速搭建出真实系统的模拟系统,并可以使用计算机来模拟系统行为,可以有效地缩短控制系统设计的周期。
其次,基于Matlab的仿真技术可以有效地改善系统设计质量。
通过分析模拟系统的行为,可以寻找更合理的解决方案,从而改善系统设计的质量。
第三,基于Matlab的仿真技术可以有效地确定系统参数。
通过在模拟系统中添加不同参数,并通过对系统模拟行为的分析,可以确定使系统更加有效的参数组合。
最后,基于Matlab的仿真技术可以有效地优化系统性能。
通过对系统行为的分析,可以识别出系统存在的问题,并设计相应的优化策略,从而实现系统性能的最佳化。
综上所述,基于Matlab的仿真技术在现代控制系统分析与设计中发挥着重要的作用,不仅可以提高系统设计的效率,而且可以改善系统设计的质量,确定系统参数,优化系统性能。
自动控制原理Matlab仿真应用
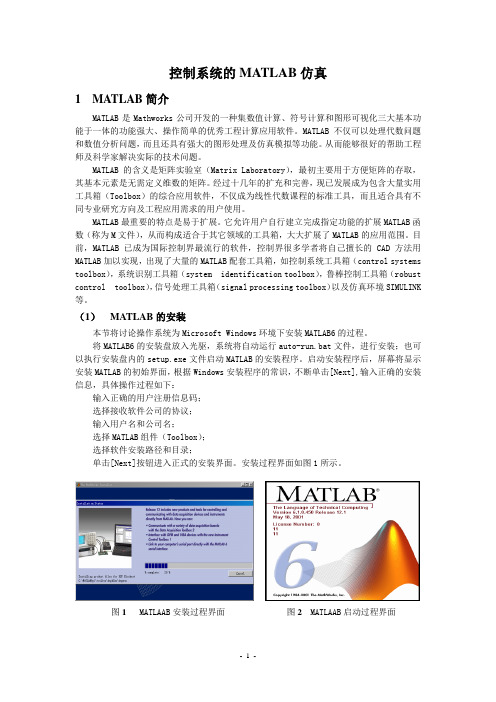
控制系统的MATLAB 仿真1 MATLAB 简介MATLAB 是Mathworks 公司开发的一种集数值计算、符号计算和图形可视化三大基本功能于一体的功能强大、操作简单的优秀工程计算应用软件。
MATLAB 不仅可以处理代数问题和数值分析问题,而且还具有强大的图形处理及仿真模拟等功能。
从而能够很好的帮助工程师及科学家解决实际的技术问题。
MATLAB 的含义是矩阵实验室(Matrix Laboratory ),最初主要用于方便矩阵的存取,其基本元素是无需定义维数的矩阵。
经过十几年的扩充和完善,现已发展成为包含大量实用工具箱(Toolbox )的综合应用软件,不仅成为线性代数课程的标准工具,而且适合具有不同专业研究方向及工程应用需求的用户使用。
MATLAB 最重要的特点是易于扩展。
它允许用户自行建立完成指定功能的扩展MATLAB 函数(称为M 文件),从而构成适合于其它领域的工具箱,大大扩展了MATLAB 的应用范围。
目前,MATLAB 已成为国际控制界最流行的软件,控制界很多学者将自己擅长的CAD 方法用MATLAB 加以实现,出现了大量的MATLAB 配套工具箱,如控制系统工具箱(control systems toolbox ),系统识别工具箱(system identification toolbox ),鲁棒控制工具箱(robust control toolbox ),信号处理工具箱(signal processing toolbox )以及仿真环境SIMULINK 等。
(1) MATLAB 的安装本节将讨论操作系统为Microsoft Windows 环境下安装MATLAB6的过程。
将MATLAB6的安装盘放入光驱,系统将自动运行auto-run.bat 文件,进行安装;也可以执行安装盘内的setup.exe 文件启动MATLAB 的安装程序。
启动安装程序后,屏幕将显示安装MATLAB 的初始界面,根据Windows 安装程序的常识,不断单击[Next],输入正确的安装信息,具体操作过程如下:输入正确的用户注册信息码;选择接收软件公司的协议;输入用户名和公司名;选择MATLAB 组件(Toolbox );选择软件安装路径和目录;单击[Next]按钮进入正式的安装界面。
基于Matlab仿真的自动控制原理实验教学改革_刘云龙

层面设置。4 个选修实验为串联超前滞后类校正设 PID 类控制器校正设计, 计, 受限机器人关节控制系统 。 和球杆旋转控制系统 选修实验从综合设计层面出发 加深对控制理论的理解和掌握, 同时为进一步 学 习 Quanser、 dSPACE 等半实物仿真系统奠定良好的基础 。 下面对上述实验作简要介绍。 1. 1 线性控制系统的数学模型 控制系统的数学模型是系统分析与综合的基础 , [6 ] 其获得方式主要有物理建模和系统辨识两种方法 。 对于线性连续时间系统, 主要有三种形式: 传递函数模 型, 状态方程模型和零极点模型。假定以下公式中, 参 量、 向量或矩阵均是相容的, 给出对应的 Matlab 命令。 传递函数模型的一般数学表达式为 b1 s m + b2 s m -1 + … + b m s + b m +1 G( s) = n s + a1 s n -1 + … + a n -1 s + a n 对应的 Matlab 命令为: num = [b1 , b2 , …, bm , bm + 1 ] ; den = [ 1, a1 , …, an - 1 , an ] ; G = tf( num,den) 另外, 传递函数模型的 Matlab 命令也可以采用定 义传递函数算子的形式实现。 状态方程模型的一般数学表达式为
Reform on Experiment Teaching of Principle of Automatic Control Based on Matlab Simulation
LIU Yunlong, WANG Ruilan, LIU Lijun, WANG Wencheng ( College of Information and Control Engineering,Weifang University,Weifang 261061 ,China) Abstract: Aiming at the existing problem in experiment teaching of principle of automatic control,optimization of experiment contents and reform of experiment modes are proposed in this paper. In the experiment content,scientific computing data, plotting simulation curves, and designing controllers or adjusters are achieved based on Matlab simulation. The control systems are constructed in the experiment, and their parameters are modified easily. Furthermore,the results of experiments can be obtained intuitively and rapidly. In the experiment mode, all the experiments are divided into three types of modes: basic theory mode,conclusionverified mode,and project design mode. The teaching mode is carried out in the learnercentered by changing the roles of teachers,and we emphasis on the experiment principle,and pay attention to problems in the experiment teaching. We also attach importance to experiment process of students,follow students' cognitive habits,and pay attention to practical ability of students. The teaching mode can obviously improve students' ability in simulation and design. Meanwhile,it has a better practicability and a wider suitability. Key words: principle of automatic control; experiment teaching; experiment mode; Matlab simulation
自动控制原理实验1-6

⾃动控制原理实验1-6实验⼀MATLAB 仿真基础⼀、实验⽬的:(1)熟悉MATLAB 实验环境,掌握MATLAB 命令窗⼝的基本操作。
(2)掌握MATLAB 建⽴控制系统数学模型的命令及模型相互转换的⽅法。
(3)掌握使⽤MATLAB 命令化简模型基本连接的⽅法。
(4)学会使⽤Simulink 模型结构图化简复杂控制系统模型的⽅法。
⼆、实验设备和仪器 1.计算机;2. MATLAB 软件三、实验原理函数tf ( ) 来建⽴控制系统的传递函数模型,⽤函数printsys ( ) 来输出控制系统的函数,⽤函数命令zpk ( ) 来建⽴系统的零极点增益模型,其函数调⽤格式为:sys = zpk ( z, p, k )零极点模型转换为多项式模型[num , den] = zp2tf ( z, p, k ) 多项式模型转化为零极点模型 [z , p , k] = tf2zp ( num, den )两个环节反馈连接后,其等效传递函数可⽤feedback ( ) 函数求得。
则feedback ()函数调⽤格式为: sys = feedback(sys1, sys2, sign )其中sign 是反馈极性,sign 缺省时,默认为负反馈,sign =-1;正反馈时,sign =1;单位反馈时,sys2=1,且不能省略。
四、实验内容:1.已知系统传递函数,建⽴传递函数模型2.已知系统传递函数,建⽴零极点增益模型3.将多项式模型转化为零极点模型12s 2s s 3s (s)23++++=G )12()1()76()2(5)(3322++++++=s s s s s s s s G 12s 2s s 3s (s)23++++=G )12()1()76()2(5)(3322++++++=s s s s s s s s G4. 已知系统前向通道的传递函数反馈通道的传递函数求负反馈闭环传递函数5、⽤系统Simulink 模型结构图化简控制系统模型已知系统结构图,求系统闭环传递函数。
matlab在自动控制原理中的应用毕业论文

建筑与技术学院MATLAB在自动控制原理中的应用毕业设计(论文)原件及使用授权说明原始语句我保证我提交的毕业设计(论文)是我在导师指导下所做的研究工作和成果。
据我所知,除文中特别标注和注明的地方外,不包含其他人或组织已发表的研究成果,也不包含我曾用来与其他教育机构取得学位或学历的材料。
对本研究有所帮助和贡献的个人或集体,都做出了明确的解释,并表达了对本文的兴趣。
作者签名:日期:讲师签名:日期:授权说明本人完全理解学校关于毕业设计(论文)收集、保存和使用的规定,即按照学校的要求提交毕业设计(论文)的印刷版和电子版;学校有权保留毕业设计(论文)的印刷版和电子版,并提供目录检索和阅读服务;学校可以采用影印、减印、数字化或其他复制手段保存论文;在不盈利的前提下,学校可以发表论文的部分或全部内容。
签名:日期:目录摘要3第1章绪论41.1研究目的41.2相关研究现状41.3研究方法41.4本次设计的主要容以与目前学术届近一步研究的趋势61. 4. 1本次设计的主要容61. 4. 2目前学术界近一步研究的趋势6第2章开发工具82.1 MATLAB编程语言发展历程与特点82.2 MATLAB系统构成92.3 MATLAB的GUI设计102.4本章小结11第3章控制系统性能指标与校正装置分类123.1控制系统的性能指标123. 2控制系统校正的分类143.3本章小结16第4章基于频率法的控制系统的校正设计174.1基于频率法的串联超前校正174.1.1 串联超前校正网络设计的算法步骤174.1.2超前校正装置的评价184.2基于频率法的串联滞后校正184.2.1串联滞后校正网络设计的算法步骤194. 2. 2滞后校正装置的评价194.3基于频率法的串联超前滞后校正194.3.1串联超前滞后校正网络设计的算法步骤204.3.2滞后超前校正装置的评价204. 4三种校正方法的效果对比214.5本章小结21第5章控制系统的仿真与校正对比分析225.1程序方式225. 1. 1控制系统校正前的性能指标225. 1. 2校正装置的设计过程与其性能指标的仿真285. 1. 3控制系统校正后的性能指标305.2Multisim电路设计仿真方式38第6章设计总结416. 1总结416. 2心得41附英文文献:43摘要本文将讨论如何根据用户对自动控制系统的要求来设计串级补偿器,这具有非常重要的现实意义。
计算机控制器 积分分离式pid matlab

计算机控制器积分分离式pid matlab积分分离式PID控制器是PID控制器的一个变体,通过分离积分部分的控制增益,可以显著提高控制性能。
本文将介绍积分分离式PID控制器的原理、设计以及在MATLAB中的实现。
1. 积分分离式PID控制器原理PID控制器是工业自动化领域中最常见的控制器之一。
它通过对系统的误差进行比例、积分和微分处理,并将其转化为输出控制信号来实现对系统的控制。
但是,传统的PID控制器在应对一些高级控制要求时,有时无法满足精度和稳定性等方面的需求。
其中最常见的问题是,当系统存在较大的噪声干扰或扰动时,积分控制会导致系统的过度响应,从而影响控制性能。
积分分离式PID控制器通过一种新的设计方法提供了解决这些问题的方法。
它的基本思想是将PID控制器中的积分部分分离出来,并将其与比例和微分部分分开进行控制。
这样,在处理一些大幅度随机变化的输入信号时,可以显著提高控制性能。
它的结构如下图所示:其中,PID控制器的比例、微分和积分输出均为加法器(Σ)的输入。
将积分控制单独分离出来,可以将其控制增益设定为Ki1,使其响应时间较短,这有助于快速消除系统的初始误差。
将比例和微分控制合并在一起,他们的控制增益设定为Kp和Kd2,作为控制作用的主要部分,其响应时间较慢,适用于抑制系统的震荡。
在实际应用过程中,这种控制器的性能非常稳定,且对于强扰动和噪声具有较好的鲁棒性。
2. 设计积分分离式PID控制器设计积分分离式PID控制器的方法与传统PID控制器相似。
首先通过系统建模,确定系统的动态特性,然后将其转化为传统PID控制器的参数,最后将积分控制和比例、微分控制分别设计,并分别提取参数。
常规步骤如下:- 对需要控制的系统进行建模,获取系统的传递函数,并将其转化为标准的二阶系统。
- 设置积分控制器的增益Ki1,常规设置为比例增益Kp的1/10~1/100,并且一般设置为标准PID控制器Ki的1/3~1/10。
自控实验-自动控制系统的MATLAB仿真分析

实验名称:自动控制系统的MATLAB仿真分析一、实验目的1.熟悉MATLAB在自动控制系统仿真中的应用;2.对自动控制系统进行仿真研究;3.掌握用MATLAB绘制自动控制系统根轨迹及对数频率特性的方法,掌握根据系统根轨迹及对数频率特性分析自动控制系统性能的方法。
二、实验设备1.计算机2.MATLAB软件三、实验内容1.用MATLAB提供的Simulink仿真软件工具对实验一中的各个典型环节及二阶系统进行阶跃响应仿真研究,将仿真获得的阶跃响应结果与模拟电路获得的阶跃响应结果进行比较。
(1)比例环节传递函数为200 ()51 G s=建立仿真模型,得到的输出结果如图所示:(2)积分环节传递函数为9.8 ()G ss=建立仿真模型,得到的输出结果如图所示:(3)一阶惯性环节传递函数为3.9 ()0.21G ss=+建立仿真模型,得到的输出结果如图所示:(4)比例积分环节传递函数为0.39781 ()0.102sG ss+=建立仿真模型,得到的输出结果如图所示:(5)比例微分环节传递函数为10 ()220s G ss=++建立仿真模型,得到的输出结果如图所示:(6)比例微分积分环节传递函数为51050 ()220sG ss s+=+++建立仿真模型,得到的输出结果如图所示:(7) 二阶系统的阶跃响应 ①0.325K ξ==传递函数为2()250()10250C s R s s s =++ 建立的仿真模型与阶跃响应仿真波形如下图所示:②0.510K ξ==传递函数为2()100()10100C s R s s s =++ 建立的仿真模型与阶跃响应仿真波形如下图所示:③0.75K ξ==传递函数为2()50()1050C s R s s s =++ 建立的仿真模型与阶跃响应仿真波形如下图所示:2. 单位负反馈系统的开环传递函数为:(1)()()(21)k s G s H s s s +=+仿真绘制K 从0~∞变化时的根轨迹,分析系统的稳定性。
计算机自动控制与MATLAB实现的研究
计算机自动控制与MATLAB实现的研究作者:王吉张品来源:《消费电子·理论版》2013年第01期摘要:文章对计算机自动控制系统进行了研究,总结实现计算机控制系统的具体设计思想和方法。
还通过运用MATLAB的仿真,来验证系统描绘和稳定性,从多方面来对计算机自动控制方面进行阐述。
关键词:计算机自动控制 MATLAB仿真中图分类号:TP13 文献标识码:A 文章编号:1674-7712 (2013) 02-0073-01计算机在我国现代工业生产自动化中发挥着重要的作用,自动控制是利用计算机来对操作过程进行远程控制,对系统进行检测和控制,而目前控制系统的设计和实现都是采用组态软件的操作方法。
对于设计对象与设计部分没有严格的界限,因此可以把面向设计对象分析理解为是面向对象设计的组成的一个部分,面向对象设计的基本出发点是尽可能按照人类的思维去分析和解决问题,能够很好进行人工系统的仿真,模拟现实世界,来完成计算机与人类直接的对接。
一、自动控制系统的设计特点及应用从设计者的角度出发,面向对象的自动控制在系统的设计是面向被控制系统对象的一种设计方法,控制系统的设计人员要将控制系统分成许多对象构成的子系统,同时,将控制系统中的硬件以及物理量虚拟为相应的对象。
设计者的目的要确定被控制系统对象属性及控制方法,将各种控制连接起来,封装在控制系统内,调用控制对象进行操作,完成各项数据的传递及计算操作。
面向对象设计则要看做是从对象中提炼出来并定义对象之间的交互协议,定义数据的结构和过程上,还可以将面向对象的自动控制系统设计为两个方向:高级方向、低级方向。
高级方向的设计主要是解决自动控制系统划分为较大的对象;低级方向设计则是通过设计来确定对象的方法和属性。
面对对象是想是指软件功能的实现过程,包括对每个对象内部功能的实现,来确定对象那些处理能力在那些类中进行描述,最终实现系统的界面输出形式。
二、自动控制系统的MATLAB的表达方式自动控制分析过程,是将时间区域上的表达映射到复数区域中,之后在进行性能分析。
MATLAB实验报告
MATLAB实践报告2016/2017学年第一学期专业:电气工程及其自动化班级:学号:姓名:2017年 2 月目录第1章绪论 (1)1.1 Matlab简介 (1)1.2 Matlab语言特点及优势 (1)1.2.1 语言特点 (1)1.2.2 优势 (2)1.3 Matlab的功能 (5)第2章Matlab实践任务 (6)2.1实验一Matlab环境语法、基本运算及绘图 (6)2.1.1实验目的 (6)2.1.2实验原理 (6)2.1.3实验内容 (6)2.2实验二Matlab数值运算 (10)2.2.1实验目的 (10)2.2.2实验原理 (10)2.2.3实验内容 (10)2.3实验三Matlab的符号计算 (19)2.3.1实验目的 (19)2.3.2实验内容 (19)2.4实验四Matlab基本编程方法 (23)2.4.1实验目的 (23)2.4.2实验内容 (23)第3章小结 (27)参考文献 (28)第1章绪论1.1 Matlab简介Matlab是“Matrix Laboratory”的缩写,意为“矩阵实验室”,是当今美国很流行的科学计算软件.信息技术、计算机技术发展到今天,科学计算在各个领域得到了广泛的应用.在许多诸如控制论、时间序列分析、系统仿真、图像信号处理等方面产生了大量的矩阵及其相应的计算问题.自己去编写大量的繁复的计算程序,不仅会消耗大量的时间和精力,减缓工作进程,而且往往质量不高.美国Mathwork软件公司推出的Matlab软件就是为了给人们提供一个方便的数值计算平台而设计的.Matlab是一个交互式的系统,它的基本运算单元是不需指定维数的矩阵,按照IEEE的数值计算标准(能正确处理无穷数Inf(Infinity)、无定义数NaN(not-a-number)及其运算)进行计算。
系统提供了大量的矩阵及其它运算函数,可以方便地进行一些很复杂的计算,而且运算效率极高。
Matlab命令和数学中的符号、公式非常接近,可读性强,容易掌握,还可利用它所提供的编程语言进行编程完成特定的工作。
自动控制原理实践教学的改革与探究-以基于MATLAB实时控制的水箱液位控制实验为例

自动控制原理实践教学的改革与探究-以基于MATLAB实时控制的水箱液位控制实验为例于建均;李慧杰;乔俊飞;杨金福;韩红桂;严爱军【摘要】Automatic Control Theory is the core foundation course in theprofessional of information and control, its practical teaching program not only takes on the tasks of comprehending, consolidating, deepening the theoretical knowledge through the class teaching, but also is the link between theory and practical application. In the practical teaching program of Automatic Control Theory, Experiment System is constructed based on MATLAB Real-Time Control module: Controller is debugged in the Simulink Module of MATLAB, the control signal is sent to the physical object model by means of multi-function card PCI1711.This practical teaching methods could organic bond the theory knowledge and practical application. Not only Implemented control action to the physical object, but also avoided the complex programming problem in the traditional real-time control. The running and debugging of the system is succinct and visual, and the efifciency of experiment has been improved.%自动控制原理是信息控制类专业的核心基础课程,其实践教学环节不仅担负着理解、巩固、加深课堂教学理论知识的任务,同时也是理论与实践应用之间的纽带。
自动控制原理MATLAB仿真实验指导书(4个实验)
自动控制原理MATLAB仿真实验实验指导书电子信息工程教研室实验一典型环节的MA TLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MA TLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机自动控制与MATLAB实现的研究
摘要:文章对计算机自动控制系统进行了研究,总结实现计算机控制系统的具体设计思想和方法。
还通过运用matlab的仿真,来验证系统描绘和稳定性,从多方面来对计算机自动控制方面进行阐述。
关键词:计算机自动控制 matlab仿真
中图分类号:tp13 文献标识码:a 文章编号:1674-7712 (2013)02-0073-01
计算机在我国现代工业生产自动化中发挥着重要的作用,自动控制是利用计算机来对操作过程进行远程控制,对系统进行检测和控制,而目前控制系统的设计和实现都是采用组态软件的操作方法。
对于设计对象与设计部分没有严格的界限,因此可以把面向设计对象分析理解为是面向对象设计的组成的一个部分,面向对象设计的基本出发点是尽可能按照人类的思维去分析和解决问题,能够很好进行人工系统的仿真,模拟现实世界,来完成计算机与人类直接的对接。
一、自动控制系统的设计特点及应用
从设计者的角度出发,面向对象的自动控制在系统的设计是面向被控制系统对象的一种设计方法,控制系统的设计人员要将控制系统分成许多对象构成的子系统,同时,将控制系统中的硬件以及物理量虚拟为相应的对象。
设计者的目的要确定被控制系统对象属性及控制方法,将各种控制连接起来,封装在控制系统内,调用控制
对象进行操作,完成各项数据的传递及计算操作。
面向对象设计则要看做是从对象中提炼出来并定义对象之间的
交互协议,定义数据的结构和过程上,还可以将面向对象的自动控制系统设计为两个方向:高级方向、低级方向。
高级方向的设计主要是解决自动控制系统划分为较大的对象;低级方向设计则是通过设计来确定对象的方法和属性。
面对对象是想是指软件功能的实现过程,包括对每个对象内部功能的实现,来确定对象那些处理能力在那些类中进行描述,最终实现系统的界面输出形式。
二、自动控制系统的matlab的表达方式
自动控制分析过程,是将时间区域上的表达映射到复数区域中,之后在进行性能分析。
时间区域分析虽然具有直观和准确表达的优点,但是在分析系统的稳定上、瞬态过程和稳态误差以及微积方程的求解上还有一定的弊端,所以采取复数域上的分析方法。
控制系统最常用的分析方法。
控制系统最常用的分析主要有两个步骤:一是确定激励信号;二是确定传递函数的形式,最后求出响应。
一种输入为单位冲击响应函数的impulse(sys):一般用于绘制系统sys(由函数zpk、ss或tf产生)的单位激励响应,结果不返回数据,只返回图形。
第二种为输入阶跃响应函数setp(sys),这种函数用于绘制系统sys(由函数zpk、ss或tf产生)的阶跃响应,其计算结果不返回数据,只返回图形,案例如下:
设系统函数为:g(s)=4/(s2+2s+5);求其脉冲响应。
matlab的编写程序如下:
>> sys = tf (4,[1 14]);
> > implus (sys);
> > title (脉冲响应);
程序运行结果如图1所示
控制系统稳定性的判断:
设系统特征方程为s5+s4+2s3+5s2+3s+4=0,计算其特征并计算系统的稳定性。
在计算机command windows窗口下输入下列程序,计算结果输出如下:
上面计算机结果中两个复数计算结果是两个实部大于零的根,所以系统为不稳定。
已知系统开环传递函数g(s)=10000/[s(s2+5s+100)],在command windows窗口输入程序,用阶跃相应曲线验证,如下图2。
从输入的响应曲线来看为不收敛,可以推断出该系统不稳定。
三、结论
总之,计算机自动控制的事项是一个将业务逻辑由具体的编程技术当中提取出来的过程,将问题的最主要的方面抽象成一个简单的框架,来解决主要矛盾。
在解决的过程中,将问题化解为多个细小问题,再去解决细节问题,计算机自动化控制是一个将繁琐华为简便的过程,是为人们提供方便服务的工具。
参考文献:
[1]结硕,韩光胜.matlab在自动控制原理实验中的应用[j].实验技术与管理,2012,2.
[2]严晓峰,王先成.面想对象建模方法[j].硅谷,2008(10).
[3]李霖.面向对象技术在软件开发中的应用[j].科技信息,2007(27).。