各芯片控制字及操作字格式
8251芯片介绍

(1) 单工通信:它只允许一个方向传输数据,不能进行反方向传输。
(2) 半双工通信:它允许两个方向传输数据,但不能同时传输,只能交替进行,A发B收或B发A收,这种协调可以靠增加接口的附加控制线来实现,也可用软件约定来实现。
(3) 全双工通信:它允许两个方向同时进行数据传输,A收B发的同时可A发B收,但是这两个传输方向的资源必须完全独立,A与B都必须有独立的接收器和发送器,从A到B和从B到A的数据通路也必须完全分开(至少在逻辑上是分开的)。
8251作用、特点具有同步/异步的接受/发送功能它能将并行输入的8位数据变换成逐位输出的串行信号;也能将串行输入数据变换成并行数据,一次传送给处理机。
广泛应用于长距离通信系统及计算机网络。
8251A由发送器、接收器、数据总线缓冲存储器读/写控制电路及调制/解调控制电路等5部分组成,各组成部分的工作过程:8251A的发送器包括发送缓冲存储器,CPU用OUT指令将要发送的数据送入到8251A的数据总线缓冲器,再并行送入发送数据缓冲器中。
当TxRDY有效时,将数据送移位寄存器将并行数据转换为串行数据并格式化后,经TxD引脚串行输出。
发送移位寄存器(并→串转换)及发送控制电路3部分,CPU需要发送的数据经数据发送缓冲存储器并行输入,并锁存到发送缓冲存储器中。
如果是采用同步方式,则在发送数据之前,发送器将自动送出一个(单同步)或两个(双同步)同步字符(Sync)。
然后,逐位串行输出数据。
如果采用异步方式,则由发送控制电路在其首尾加上起始位及停止位,然后从起始位开始,经移位寄存器从数据输出线T X D逐位串行输出,其发送速率由T X C端上收到的发送时钟频率决定。
当发送器作好接收数据准备时,由发送控制电路向CPU发出T X RDY有效信号,CPU立即向8251A 并行输出数据。
如果8251A与CPU之间采用中断方式交换信息,那时T X RDY作为向CPU发出的发送中断请求信号。
单片机芯片8279用法讲解

0:写入后地址不变 1:每次写入地址自动加
键盘显示接口芯片8279
⑥ 禁写显示RAM/消隐命令
1 0 1 IWA IWB BLA BLB
特征 无 A组 B组 A组 B组
位
效 禁写 禁写 消隐 消隐
IWA:禁止A组显示 RAM写。D3=1,A组禁写;D3=0,允许A组写。
OUTA3~OUTA0与OUTB3~OUTB0单独使用时,若只想改变B组的输出 值而A组的输出不受影响,就可以让D3=1即禁止向A组显示RAM写数据,这 样在向显示RAM的一个单元写入8位字节数据时就只写入字节的低4位而字节 的高4位不写入RAM单元。
3.8279的工作方式
8279有三种工作方式——键盘输入(键扫描)、传感器扫描、选通输入 键盘输入方式:有键按下时,回复缓冲器缓冲并锁存行列式键盘的列输入线。在
逐行列扫描时,回复线用来搜寻每一行列中闭合的键,当某一键闭合时,去抖 电路被置位,延时等待10ms后,再检查该键是否仍处在闭合状态,如不是闭合, 则当做干扰信号不予理睬;如是闭合,则将该键的列扫描码、行回复码、引脚 CNTL和引脚SHIFT的状态(两个独立附加的开关)一起形成键盘数据被送入 8279内部的FIFO(先进先出)存储器。键盘数据格式如下:
FIFO RAM的状态寄存器: (a)键盘输入方式或选通输入方式,寄存FIFO RAM的工作状态,FIFO
RAM不空时,会使IRQ变高; (b) 传感器方式,若检测出传感器的状态发生了变化,会使IRQ变高
⑥ 显示RAM及显示地址寄存器
显示RAM:16×8位,存储字符的字形码,显示时,从OUTA3~0和OUTB3~0输出
8个数码管从左至右依次 0 1 2 3 4 5 6 7
显示RAM地址单元
可编程并行接口芯片8255A

大规模控制系统的需求。
8255A与可编程逻辑器件的结合,可以实现高速、实时的数据
03
采集和控制。
在数据采集与控制系统中的应用
8255A在数据采集与控制系统中,可以作为数据传输的桥梁,实现快速、稳定的数 据传输。
通过8255A,可以实现多路数据的并行采集和处理,提高了数据处理的效率。
8255A在数据采集与控制系统中,可以作为主控制器,协调各个模块的工作,保证 系统的稳定运行。
微处理器可以通过8255A实现对 外部设备的控制,扩展了微处理
器的控制能力。
8255A可以作为微处理器的输入 /输出接口,实现人机交互和数据
采集。
与可编程逻辑器件连接的应用
01
8255A可以与可编程逻辑器件连接,实现复杂的逻辑控制和数 据处理。
02
通过8255A,可编程逻辑器件可以扩展其输入/输出端口,满足
根据实际需求,设定8255A的数据格式,包括数据位、停止位、 奇偶校验位等。
数据读写操作
通过数据传输编程实现对8255A的数据读写操作,包括读数据、 写数据、读写同时操作等。
PART 05
8255A的应用实例
与微处理器连接的应用
8255A与微处理器连接,可以实 现并行数据传输,提高数据传输
效率。
在现代嵌入式系统中,8255A芯片仍有一 定的应用,尤其在一些需要并行I/O接口的 场合,如人机界面、传感器等。
PART 02
8255A芯片的基本结构 与功能
芯片的基本组成
输入/输出端口
数据总线
8255A包含三个输入/输出端口,分别为 端口A、端口B和端口C。每个端口都有8 个位,可以独立配置为输入或输出模式。
控制信号生成
12位串行A_D转换器MAX1247原理与应用
12位串行A ΠD 转换器MAX 1247原理与应用王喜斌1 常淑英2(11华北航天工业学院 电子工程系,河北廊坊065000;21廊坊美联制动装置有限公司,河北廊坊065000)摘 要:M AX 1247是M AXI M 公司推出的4通道12位串行A ΠD 转换器,其内部具有SPI 串行接口,高速、低功耗。
本文详细介绍了M AX 1247的工作原理、工作时序及与单片机系统的接口电路及有关的读写程序。
关键词:单片机;模数转换器;M AX 1247;SPI中图分类号:TP335 文献标识码:A 文章编号:1009-2145(2004)01-0011-04收稿日期:2003-12-09作者简介:王喜斌(1968-),男,黑龙江华川人,工程师,长期从事计算机应用及自动控制方面的研究工作。
0 概 述MAX1247是美国MAXI M 公司推出的一种低功耗、4通道、12位串行模数转换芯片。
该芯片是一种逐次逼近式模数转换芯片,其内部自带与微处理器的串行接口SPI 。
同时,它还可以在连续转换模式下对外部4通道模拟输入信号进行顺序转换,且单一电源供电(217V ~5125V )。
与其他A ΠD 转换器相比,MAX1247具有较低的功耗和丰富的片上资源,且内部结构紧凑,集成度高,工作性能好,非常适用于便携式仪器仪表开发。
1 引脚说明图1所示为MAX1247的引脚图。
MAX1247具有16个引脚,各引脚定义如下:图1 MAX1247的引脚图● VDD(1):电源端;● CH0~CH3(2,3,4,5):模拟信号输入通道0~3;● C OM (6):模拟输入的参考地;● SH DN (7):关闭输入控制端,为低时,将使器件掉电;为高时,使参考缓冲区放大器处于内部补偿模式;将其浮动,则使参考缓冲区放大器处于外部补偿模式;● VREF (8):参考电压输入端;● REFAD J (9):参考缓冲放大器的输入端;● AG ND (10):模拟地;● DG ND (11):数字地;● DOUT (12):串行数据输出端;● SSTRB (13):转换结束;● DI N (14):数据输入端;● CS(15):片选端;● SC LK(16):时钟输入端;2 工作模式及工作时序211 工作模式MAX1247有以下4种工作模式:(1)UNI ΠBI (单极性转换Π双极性转换):在UNl模式下,输入的模拟量可在0V ~VREF 之间;在BI 模式下,输入的模拟量在2VREF/2~VREF/2之间;(2)FU LL POWER :掉电模式;(3)I NTERNA L C LOCK /EXTERNA L C LOCK (内时钟模式/外时钟模式):在外部时钟模式下,通过外部时钟控制数据的移入和移出,同时控制模数转换,因此要求模数转换必须在一定的时间内结束,否则转换结果将会降低,如果外部时钟的频率低于100kH z ,最好用内部时钟模式;在内部时钟模式下,MAX1247自动生成转换用时钟,无须单片机生成转换时钟,就可以读入A ΠD 转换的结果; (4)S NG LE/DIFFERE NTI A L (单极性输入模式Π双极性输入模式):在S NG LE 模式,由CH0、CH1、 第14卷第1期2004年3月 华北航天工业学院学报Journal of N orth China Institute of Astronautic Engineering V ol 114N o 11 Mar 12004CH 、CH3输入端信号分别和C OM 端口构成4路输入信号;在DIFFERE NTI A L 模式,CH0/CH1两输入端间将构成差动输入,CH2/CH3两输入端间将构成差分输入。
8251芯片

可编程通信接口8251A(USART)1.8251A的基本结构8251A的基本结构包括5个功能模块(1)数据总线缓冲器——用于暂存接收,发送数据,CPU发来的命令及8251的工作状态。
(2)读/写控制逻辑——接收来自CPU控制总线的控制信号,控制数据的传送方向。
(3)接收器——从接收数据线RXD上接收串行数据,按指定方式将其转换成并行数据。
(4)发送器——接收CPU送来的并行数据,按指定方式将其转换成串行数据通过发送数据线TXD发送出去。
(5)调制解调器控制电路——提供4个通用的控制信号,即(数据终端准备好),(数据设备准备好),(请求发送)和(准许发送),以备8251A与外设联络。
2.8251A的工作过程(1)8251A发送数据的过程①当发送缓冲器为空时,信号TXRDY有效(或状态字的D0=1),以示发送器准备好,等待CPU送入数据。
②CPU将要发送的数据写入8251A的发送缓冲器;③发送的数据进行“并→串”转换;④插入起始位、奇/偶位和停止位或同步字符等,数据一位一位从TXD端串行输出。
(2)8251A接收数据的过程①在RXD端检测到起始位或同步字符;②开始在RXD线上采集数据;③将接收到的数据“串→并”转换,并进行奇偶校验和检查错误;④将采样到的、经过变换的8位数据由接收缓冲器送入数据总线缓冲器;⑤信号RXRDY有效(或状态字的D1=1),以示8251A已接收到一个数据,待CPU读取。
3.8251A的初始化在如前面已经强调过的,在使用可编程接口之前必须进行初始化,即在使用8251A进行数据传输前,对其进行编程,将相关方式指令字、命令指令字写入8251A。
8251A初始化的具体步骤如图7-3所示。
图7-3 8251A 初始化流程图4. CPU 对8251A 的操作和控制8251A 有两个端口地址,偶地址为输入/输出数据端口地址,奇地址为控制/状态端口地址。
引脚线C/与A 0连接:A 0=0,访问输入/输出数据端口A 0=1,访问控制/状态端口控制信号:、、C/、合成对8251A 的操作如表7-1所示。
常用IO接口芯片

(5)并行接口可直接设置成用硬布线方式连接旳接口,也 可用可编程接口芯片构成可编程接口。
并行接口电路8255A
具有多种功能旳可编程并行接口电路芯片
最基本旳接口电路:三态缓冲器和锁存器 与CPU间、与外设间旳接口电路:状态寄存器
用PC6设置INTE1(输出) 用PC4设置INTE2(输入)
输入和输出中断经过
或门输出INTRA信号
PC3
INTRA
方式2双向时序
WR OBF INTR ACK
STB
IBF RD PA0~PA7 D0~D7
data-in data-out
data-out data-in
8255A旳应用
作为通用旳并行接口电路芯片, 825A具有广泛旳应用
方式2旳数据输入过程与方式1旳输入方式一样
方式2旳数据输出过程与方式1旳输出方式有一点 不同:数据输出时8255A不是在OBF*有效时向 外设输出数据,而是在外设提供响应信号ACK* 时才送出数据
方式2双向引脚
PA7~PA0
INTE1
PC6
PC7
INTE2 PC4 PC5
ACKA OBFA STBA IBFA
PC0
STBB IBFB
INTRB
输入缓冲器满信号 表达A口已经接受数据
中断允许触发器 PC2=1时 B口允许中断
中断祈求信号 祈求CPU接受数据
方式1输入联络信号
STB*——选通信号,低电平有效
由外设提供旳输入信号,当其有效时,将输入设备送 来旳数据锁存至8255A旳输入锁存器
IBF——输入缓冲器满信号,高电平有效
控制字格式

EH
IR
RTS
ER
SBRK RxE DTR TxEN
允许发送
DTR 引脚有效 允许接收 错误标志复位
RTS 引脚有效 内部复位 启动搜索同步字符
(2) 状态寄存器格式:
DSR
SYNDET
FE
OE
PE
TxE RxRDY TxRDY
5
A0
D7
D0
0
R SL EOI 0 0
L2
L1
L0
标志位
001 — 普通 EOI 方式 011 — 特殊 EOI 方式 101 — 普通 EOI 循环方式 111 — 特殊 EOI 循环方式 000 — 自动 EOI 循环(复位) 100 — 自动 EOI 循环(置位) 110 — 置位优先权命令 010 — 无效
附:各芯片控制字及操作字格式
1.8253 模式设置控制字格式:
D7
D0
SC1 SC0 RW1 RW0 M2 M1 M0 BCD
1:BCD 码计数 0:二进制计数
000: 方式 0 001: 方式 1 X10: 方式 2 X11: 方式 3 100: 方式 4 101: 方式 5
00: 计数器锁存,供 CPU 读 01: 只读/写计数器低字节 10: 只读/写计数器高字节 11: 先读/写计数器低字节,后读/写高字节
000 — IR0 001 — IR1 010 — IR2 011 — IR3 100 — IR4 101 — IR5 110 — IR6 111 — IR7
(7)OCW3——特殊屏蔽方0
0
X
ESMM
SMM
0
1
P RR RIS
0X:无效
标
芯片8251A介绍.ppt
以准备接收或发送数据 状态字:寄存8251A的工作状态
方式选择控制字格式
D7 D6 D5 D4 D3 D2 D1 D0
奇偶校验
X0:无校验 01:奇校验 11:偶校验
OUT DX,AL
INC DI
;修改指针
LOOP NEXT
HLT
设接收端8251A数据口地址为RDATA,控制口/状态口地址为 RCONT,接收数据缓冲区首地址为RBUFF
SRR: MOV DX,RCONT ;送方式选择控制字
MOV AL,7FH
OUT DX,AL
MOV AL,14H
;清除错误标志,允许接收
①通过编程,8251A可以工作在同步方式,波特率0~ 64K,也可以工作在异步方式,波特率0~19.2K; ②同步方式下可以用5~8位来表示字符,允许增加1 位奇偶校验位,能自动检测同步字符,实现收发同步;
③异步方式下用5~8位来表示字符,1位可选的奇偶校 验位,1位启动位,根据需要可设置1、1.5或2位停止位;
4. 信号的调制与解调
为在模拟信道上传输数字信号,必须把数字信号转换 成适于传输的模拟信号,而在接收端再将模拟信号转 换成数字信号。前一种转换称为调制,后一种转换称 为解调。完成调制、解调功能的设备叫做调制解调器 (Modem)。
三种主要的调制方式:
•幅移键控ASK •频移键控FSK •相移键控PSK
计
计
算 机
算
或
机
外
设
微机系统在串行通信时必须进行串行与并行的转换
2. 同步方式和异步方式 •异步串行方式
游戏机常用外部芯片中文资料

数据/命令传送。 CLK(系统时钟):输入线,为 8279 提供内部时钟的输入端。
RESET(复位):输入线,当 RESET=1 时,8279 复位,其复位状态为,16 个字符显示, 编码扫描键盘——双键锁定,程序时钟编程为 31。
/CS(片选):当/CS=0 时 8279 被选中,允许 CPU 对其进行读写,否则被禁止。 A0(数据选择)输入线,当 A0=1 时 CPU 写入数据为命令字,读出数据为状态字;当 A0=0
其中 D0-D7 用于传送 CPU 与 8255 之间的命令与数据,PA0-PA7、PB0-PB7、PC0-PC7 分别与 A、B、C 口对应,用于 8255 与外设之间传送数据。 ② 控制线:/RD、/WR、RESET :读/写控制线,复位信号,当 RESET 为高电平时所 有 8255 内部寄存器都清零,的有通道都设置为输入方式,24 条 I/O 引脚都为高阻状 态。 ③ 寻址线:/CS、A0 、A1 当 CS 有效时,A0、 A1 的 4 种组合 00 01 10 11 分别用来 选择 A、B、C 口和控制寄存器,所以一片 8255 共有 4 个地址单元。 3,8255 的工作方式 8255 有三种工作方式 ,即方式 0、方式 1、方式 2 方式 0(基本输入输出方式):这种方式不需要任何选通信号,A 口、B 口、C 口高 4 位和低 4 位都可以被设定为输入或输出,作为输出口时,输出的数据被锁存;作为输入口 时,其输入的数据不锁存。 方式 1(选通输入输出方式):在这种方式下,A、B、C 三个口将被分为两组。A 组 包括 A 口和 C 口的高 4 位,A 口可由编程设定为输入口或输出口,C 口的高 4 位由用来作 为输入输出操作的控制和同步信号;B 组包括 B 口和 C 口的低 4 位,B 口可由编程设定为 输入或输出口;C 口的低 4 位由用来作为输入/输出操作的控制和同步信号。A 口和 B 口的 输入输出数据都被锁存。 方式 2(双向总线方式):A 口为 8 位双向总线口,C 口的 PC3-PC7 用来作为输入/ 输出操作的控制和同步信号,应注意的是只有 A 口允许作为双向总线口使用,这时的 B 口 和 PC0-PC2 由可编程为方式 0 或方式 1 工作。 4,8255 的控制字 8255 工作方式的选择是通过对控制口输入控制字(或称命令字)的方式来实现的,控制 字有方式选择控制字和 C 口置位/复位控制字。 ① 方式选择控制字的格式与定义如图 1——4 ② C 口置位/复位控制字如图 1——5 C 口具有位操作功能,把一个置/复位控制字送入 8255 的控制寄存器(控制口)就 能把 C 口的某一位置 1 或清零而不影响其它位的状态。
第8章可编程输入输出接口2014(新简)

当A1A0=11时 选择控制端口
20
表8.1 8255A的读写操作控制
21
8.1.2 8255A的控制字及其工作方式
8255A 共有两个控制字:即工作方 式控制字和对C口臵位/复位控制字。 1. 控制字 (1)工作方式控制字: 控制字和各位的含义如图所示。
22
D7
D6 D 5
D4 D3
D2 D1 D0
下图示出 8255A 方式 1 选通输入时的内部 结构图。
35
•STB:选通信号。外设准备好数据发 送STB#,低电平有效。
•IBF:输入缓冲器满信号,STB#下降 沿8255向外设输出IBF信号,表示输入 缓冲器满,高电平有效。
36
INTR:中断请求信号,高电平有效 。STB#上升沿使INTR从无效到有效 ,请求CPU读数据。CPU接到INTR, 读数据发送RD#,RD#下降沿变INTR 有效为无效,表示已经得到响应, RD#上升沿使IBF满变为不满,表示 数据已经读走。 INTE:中断允许信号,它是通过端 口PC4(端口A)或PC2(端口B)的位来编 程的内部位。
ACK: 外设应答信号。该信号的下 降沿使OBF臵高,表示输出缓冲器 空,低电平有效.当外设读取数据以 后,由外设输入给8255,表示数据
42
INTR:中断请求信号。写信 号的下降沿使INTR引脚无效, 表示CPU正在响应中断,高电 平有效。
INTE : 中断允许信号。在中
断允许情况下, ACK 的
出数据均受到锁存。
端口 B 和 C: 都包含一个 8 位数据输入缓
冲器和一个 8位的数据输出锁存器和缓冲器,
输出数据能锁存,输入数据不锁存。
7
端口 C: 可分成两个 4 位端口,分别定义 为输入或输出端口,还可定义为控制、状 态端口,配合端口A和端口B工作。 在实际应用中C口 的8位可分为两个4位
在8255a中的工作方式控制字
在8255a中的工作方式控制字8255A是一种通用并行输入输出端口芯片,它具有多种工作方式,其中通过控制字来选择不同的工作方式。
本文将详细介绍8255A的工作方式控制字,帮助读者深入了解该芯片及其应用。
8255A芯片具有三种工作方式:模式0、模式1和模式2。
每种工作方式都可以通过控制字来进行设置。
首先,我们来看模式0。
模式0是最简单的工作方式,它将8255A 芯片配置为三个8位输入/输出端口。
通过控制字的位设置,我们可以分别将三个端口配置为输入或输出。
例如,将控制字的位0设置为1,则相应的端口A将被配置为输出端口;同样地,如果位0设置为0,则端口A将被配置为输入端口。
通过这种方式,我们可以轻松地控制芯片的输入和输出状态。
接下来是模式1。
模式1将8255A芯片配置为两个8位输入/输出端口和一个4位双向输入/输出端口。
与模式0类似,我们可以通过控制字的位设置来选择每个端口是输入还是输出。
与模式0的不同之处在于,模式1包含一个双向端口,可以通过控制字的位来选择该端口的输入或输出模式。
例如,将控制字的位4设置为1,该双向端口将被配置为输出模式;同样地,如果位4设置为0,则该端口将被配置为输入模式。
最后,是模式2。
模式2将8255A芯片配置为一个8位输入/输出端口和两个4位双向输入/输出端口。
通过控制字的位设置,我们可以选择每个端口是输入还是输出,并且选择双向端口的输入或输出模式,与模式1相似。
总结一下,8255A芯片的工作方式控制字对于配置芯片的输入和输出端口非常重要。
通过合理设置控制字的位,我们可以选择不同的工作模式,并灵活地控制芯片的输入和输出状态。
掌握8255A芯片的工作方式控制字,将有助于我们更好地应用该芯片,满足各种实际需求。
交通灯实验报告

微机原理课程设计报告新疆农业大学计算机与信息工程学院课程题目:微机原理与几口技术班级:电科112指导老师:张婧婧姓名:刘建国学号:114633222基于8086的交通信号控制器的设计报告摘要:这次课程设计,我们的任务是:基于8086的交通信号控制器的设计。
8086系统是我们这个学期学习的主线方向,我们将在8086系统的基础上完成交通信号控制器的设计,其具体功能是:1.显示十字路口东西、南北2个方向的红、黄、绿的指示状态。
2.实现正常的倒计时功能。
用2组数码管作为东西和南北方向的倒计时显示,显示时间为红灯30s,绿灯50s,黄灯5s。
3.按S1键能实现特殊的功能,显示倒计时的2组数码管闪烁,计数器停止计数并保持在原来的状态;东西、南北路口均显示红灯状态;特殊状态解除后能继续计数。
4.按S2键实现总体清零功能。
计数器由初始状态计数,对应的指示灯亮。
关键词:8086系统 74154 74HC373 8255A LED交通灯(一)1) 设计目的交通信号控制灯是日常交通不可缺少的工具,涉及到人们的人生和财产安全,在道路行驶上起了相当关键的作用,因而设计交通信号控制灯是非常有意义的。
同时我们这次设计的课题就是“基于8086交通信号控制器的设计”,基于以上目的,我利用一周时间精心设计出课题要求的交通灯。
2) 设计思想在此次设计过程中,我们选择了数码管、发光二极管、74LS138、74LS373、8255A和8086来控制实现交通灯按设计要求工作。
3)硬件部分1、LED设计说明:用LED作为倒计时时间的显示器,LED在亮度、功耗、可视角度和刷新速率等方面,都更具优势。
LED与LCD的功耗比大约为10:1,利用LED技术,可以制造出比LCD更薄、更亮、更清晰的显示器,LED是发光二极管属于二极管的一种,LCD是液晶显示器,两者相差太多.但是用LED的点阵也能组成显示器,适用于户外大屏幕显示,分辨率较低,LED与LCD具体比较如下图表1-1:LCD与LED的比较2、8255设计说明:用8255A可编程并行接口芯片的A、B、C三口作为红、绿、黄交通灯的控制输入口。
1553B总线ACE芯片BC操作
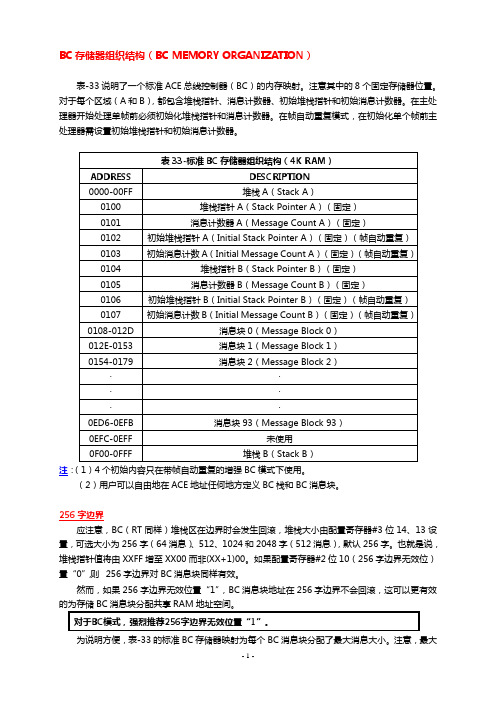
BC存储器组织结构(BC MEMORY ORGANIZATION)表-33说明了一个标准ACE总线控制器(BC)的内存映射。
注意其中的8个固定存储器位置。
对于每个区域(A和B),都包含堆栈指针、消息计数器、初始堆栈指针和初始消息计数器。
在主处理器开始处理单帧前必须初始化堆栈指针和消息计数器。
在帧自动重复模式,在初始化单个帧前主处理器需设置初始堆栈指针和初始消息计数器。
注:(1)4个初始内容只在带帧自动重复的增强BC模式下使用。
(2)用户可以自由地在ACE地址任何地方定义BC栈和BC消息块。
256字边界应注意,BC(RT同样)堆栈区在边界时会发生回滚,堆栈大小由配置寄存器#3位14、13设置,可选大小为256字(64消息)、512、1024和2048字(512消息),默认256字。
也就是说,堆栈指针值将由XXFF增至XX00而非(XX+1)00。
如果配置寄存器#2位10(256字边界无效位)置“0”,则256字边界对BC消息块同样有效。
然而,如果256字边界无效位置“1”,BC消息块地址在256字边界不会回滚,这可以更有效的为存储BC消息块分配共享RAM地址空间。
对于BC模式,强烈推荐256字边界无效位置“1”。
为说明方便,表-33的标准BC存储器映射为每个BC消息块分配了最大消息大小。
注意,最大消息为38字:带32数据字的RT-RT传输指令(控制字+2指令字+回送字+2状态字+32数据字)。
表-33的定义需要将256字边界无效位置“1”。
活动区双缓冲活动区机制将共享RAM部分区域区分为“活动”和“非活动”的。
在任何时刻,内部1553存储器管理逻辑只能访问处在“活动”区的一些数据结构。
需要注意的是,然而,任意时刻主处理器都可以访问“活动”区以及“非活动”区。
需要注意,如果一个BC帧正在被处理,此时主处理器改变了活动区(通过配置寄存器#1位13),活动区直到当前帧完成才会实际切换。
BC消息帧编程(PROGRAMMING OF BC MESSAGE FRAMES)BC存储器管理图3为BC模式存储器管理图解概述。
8255中的方式控制字和位控制字

主题:8255中的方式控制字和位控制字1. 介绍8255芯片8255是一种可编程并行I/O芯片,广泛用于微机、工控、通信、家电等领域。
它具有多种功能,包括输入/输出控制、定时/计数功能等,能够满足不同应用的需求。
2. 方式控制字的概念方式控制字是8255中的重要概念之一,它用于配置8255芯片的工作方式。
通过设置方式控制字,可以确定8255的工作模式,包括输入、输出、双向或定时/计数等。
3. 方式控制字的结构方式控制字通常由8位二进制数据组成,每一位都代表着8255的某种工作状态。
其中,最高3位用于设置端口A、端口B和端口C的工作方式,接下来的3位用于设置端口A、端口B和端口C的工作模式,最低2位用于设置定时/计数功能的工作状态。
4. 方式控制字的设置方法在使用8255芯片时,需要按照具体应用的需求来设置方式控制字。
可以通过编程的方式将合适的二进制数据写入到8255芯片的方式控制字寄存器中,以达到配置8255工作模式的目的。
5. 位控制字的概念除了方式控制字之外,8255中还有位控制字的概念。
位控制字用于控制8255芯片的具体输入/输出操作,可以实现对单个端口的位控制。
6. 位控制字的结构位控制字通常由8位二进制数据组成,每一位都代表着8255的某种输入/输出操作。
通过设置位控制字,可以实现对端口A、端口B和端口C的单个位的输入/输出控制。
7. 位控制字的设置方法对于特定的输入/输出操作,可以通过编程的方式将合适的二进制数据写入到8255芯片的位控制字寄存器中,以实现对端口的单个位的控制。
8. 方式控制字与位控制字的关系方式控制字和位控制字是8255芯片中两个重要的控制概念,它们共同构成了8255的工作模式。
方式控制字主要用于配置8255的工作方式,而位控制字则用于具体的输入/输出控制操作。
9. 总结8255芯片中的方式控制字和位控制字是控制8255工作模式和具体输入/输出操作的重要手段。
通过合理设置方式控制字和位控制字,可以实现对8255芯片的灵活控制,满足不同应用的需求。
8255的内部结构及编程方法

8255的内部结构及编程方法
8255是一个并行I/O接口芯片,其内部结构主要包括数据端口和控制端口。
数据端口有A、B、C三个,每个端口有8位数据输入/输出。
控制端口则用于控制数据端口的读/写操作。
在编程时,首先需要通过控制端口写入控制字,以设置数据端口的读/写方
式以及数据传输的方向。
控制字的格式为:D7-D3=0000,D2-D0分别对
应A、B、C三个数据端口的控制位。
例如,当D2-D0=000时,表示A口为输入,B口和C口为输出;当D2-D0=001时,表示B口为输入/输出,
而A口和C口为输出;以此类推。
具体来说,8255的内部结构如下:
1. 数据端口A、B、C:每个端口都有8位数据输入/输出,并具有数据输入锁存器和输出锁存器/缓冲器。
在实际应用中,这三个端口可作为独立输入
或输出端口使用。
2. 控制电路:分为A组和B组,用于控制各自对应的数据端口的工作方式
和读/写操作。
控制电路接收来自读/写控制逻辑电路的读/写命令,并根据
接收到的命令输出相应的控制信号。
3. 读/写控制逻辑电路:负责管理8255的数据传输过程。
它接收来自CPU 的地址和控制信号,通过内部控制逻辑向8255的各功能部件发出读/写控制命令。
4. 数据总线缓冲器:这是一个双向三态的8位数据缓冲器,用于连接8255与系统数据总线。
通过这个缓冲器,CPU可以实现与8255的数据传输。
以上内容仅供参考,如需获取更多关于8255的信息,建议咨询专业人士或查阅芯片手册。
24、25、93系列存储器介绍

93系列Microwire总线型Microwire总线采用时钟(CLK)、数据输入(DI)、数据输出(DO)三根线进行数据传输,接口简单。
Microchip公司的93XXX系列串行E2 PROM存储容量从1k bit(×8/×16)至16k bit(×8/×16),采用Microwi re总线结构。
产品采用先进的CMOS技术,是理想的低功耗非易失性存储器器件。
1引脚93XX系列串行E2PROM的产品很多,附图是93AA46型1k 1.8V Microwire总线串行E2PROM的引脚图。
CS是片选输入,高电平有效。
CS端低电平,93AA46为休眠状态。
但若在一个编程周期启动后,CS由高变低,93AA46将在该编程周期完成后立即进入休眠状态。
在连续指令与连续指令之间,CS必须有不小于250ns(TCSL)的低电平保持时间,使之复位(RESET),芯片在CS为低电平期间,保持复位状态。
CLK是同步时钟输入,数据读写与CLK上升沿同步。
对于自动定时写周期不需要CLK信号。
DI是串行数据输入,接受来自单片机的命令、地址和数据。
DO是串行数据输出,在DO端需加上拉电阻。
ORG是数据结构选择输入,当ORG为高电平时选×16结构,ORG为低电平时选×8结构。
2工作模式根据单片机的不同命令,93AA46有7种不同的工作模式,附表给出在ORG=1(×16结构)时的命令集(表中“S”为Start位)。
ORG=0(×8结构),除在地址前加A6位或在地址后加一位“X”外,其余与附表相同。
除了读数据或编程操作期间检查READY/BUSY状态时外,DO脚均为高阻状。
在擦除/写入过程中,DO为高电平表示“忙”,低电平表示“准备好”。
在CS下降沿到来时,DO进入高阻态。
若在写入和擦除转换期间,CS保持高电平,则DO端的状态信号无效。
3功能START(起始)条件CS和DI均为高电平后CLK的第一个上升沿,确定为START。
第7章可编程接口芯片1-8253

7.1.1 8253的结构
主要功能
3个独立的16位计数器通道 每个计数器有6种工作方式 按二进制或十进制(BCD码)计数 全部输入输出都与TTL电平兼容 8254是8253的改进型
8253最高计数频率2.6MHz,8254为10MHz 8254有一个读回命令
2013年8月7日 通信教研室 5
而是从下一个计数操作周期开始按新的计数值改变输出脉冲 的频率。
在已经装入计数初值的情况下,由GATE的上升沿启动:
GATE变低电平时停止计数,GATE由低变高时,从新由初 值计数
2013年8月7日
通信教研室
19
应用
方式2能产生周期性的定时信号, 称为速率发生器,称为N分频方 式和周期性定时器方式。主要应 用是作为分频器和时基信号
图8.7 方式3输出波形图
22
2013年8月7日
方式4—软件触发选通方式 (Sofewave Triggered strode)
与方式0有许多相识之处,差别仅在于输出波形不 同。 在方式4,当写入控制字后,OUT输出为高。当写 入计数初值后计数器即开始计数(相当于软件触发启 动),当计数到0后,输出变低,经过1个CLK周期, 输出又变高。输出宽度为1个CLK周期的负脉冲 方式4不能自动重复计数,即这种方式计数是一次 性的。 每次启动计数都要靠重新写入计数值,所以 称为“软件触发选通”。 当8253工作于方式4时,可用作软件触发的选通信 号发生器。
n=5
5
4
3
2
1
0
5 n=3 3 2 n=2
5
4
3
2
1
0
1
0
2
1
8086和825574LS373控制LED流水灯课设.

专 业
自动化
班 级
**
姓 名
**
设 计 起 止 日 期
2013.12.16~2013.12.20
设计题目:多路流水灯控制程序的设计
设计任务(主要技术参数):
按要求设计出模拟多路流水灯控制系统。通过8086系统总线单元和输入输出并行接口8255单元、74LS373以及LED显示单元进行连接,并应用所设计的程序使连接好的线路工作正常。
沈 阳 大 学
课程设计说明书NO.4
(1)8086的主要特性
Intel8086/8088CPU是Intel公司推出的高性能的微处理器,具体如下主要特性:
(a)8086CPU数据总线为16位,8088CUP数据总线为8位。
(b)地址总线都是20位,低16位用于数据总线复用,可直接寻址为1MB的存储空间。
LOOP $
DEC AH
CMP AH,02H
JZ START
ROR AL,1
JMP OBA2
沈 阳 大 学
课程设计说明书NO.11
OBA4:
MOV DX,00H
MOV AL,00FFH
OUT DX,AL
MOV CX,9FF0H
LOOP $
MOV CX,9FF0H
LOOP $
MOV DX,02H
OUT DX,AL
表2方式0下8255的16种输入输出组合a组b组a口pa0pa7c口pc4pc7b口pb0pb7c口pc0pc3入入入入入入入出入入出入入入出出入出入入入出入出入出出入入出出出出入入入出入入出出入出入出入出出出出入入出出入出出出出入出出出出74ls373主要功能74ls373是常用的地址锁存器芯片它实质是一个是带三态缓冲输出的8d触发器在单片机系统中为了扩展外部存储器通常需要一块74ls373芯片沈阳大学课程设计说明书图4内部结构和引脚介绍制造led的材料不同可以产生具有不同能量的光子借此可以控制led所发出光的波长也就是光谱或颜色
可编程并行接口芯片8255A
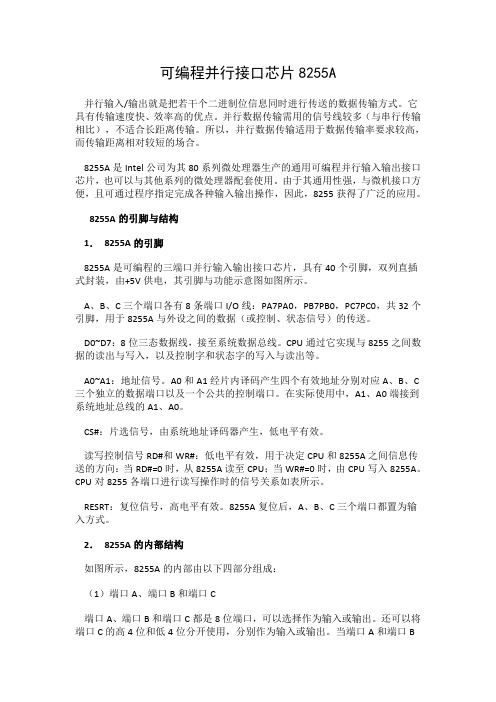
可编程并行接口芯片8255A并行输入/输出就是把若干个二进制位信息同时进行传送的数据传输方式。
它具有传输速度快、效率高的优点。
并行数据传输需用的信号线较多(与串行传输相比),不适合长距离传输。
所以,并行数据传输适用于数据传输率要求较高,而传输距离相对较短的场合。
8255A是Intel公司为其80系列微处理器生产的通用可编程并行输入输出接口芯片,也可以与其他系列的微处理器配套使用。
由于其通用性强,与微机接口方便,且可通过程序指定完成各种输入输出操作,因此,8255获得了广泛的应用。
8255A的引脚与结构1.8255A的引脚8255A是可编程的三端口并行输入输出接口芯片,具有40个引脚,双列直插式封装,由+5V供电,其引脚与功能示意图如图所示。
A、B、C三个端口各有8条端口I/O线:PA7PA0,PB7PB0,PC7PC0,共32个引脚,用于8255A与外设之间的数据(或控制、状态信号)的传送。
D0~D7:8位三态数据线,接至系统数据总线。
CPU通过它实现与8255之间数据的读出与写入,以及控制字和状态字的写入与读出等。
A0~A1:地址信号。
A0和A1经片内译码产生四个有效地址分别对应A、B、C 三个独立的数据端口以及一个公共的控制端口。
在实际使用中,A1、A0端接到系统地址总线的A1、A0。
CS#:片选信号,由系统地址译码器产生,低电平有效。
读写控制信号RD#和WR#:低电平有效,用于决定CPU和8255A之间信息传送的方向:当RD#=0时,从8255A读至CPU;当WR#=0时,由CPU写入8255A。
CPU对8255各端口进行读写操作时的信号关系如表所示。
RESRT:复位信号,高电平有效。
8255A复位后,A、B、C三个端口都置为输入方式。
2.8255A的内部结构如图所示,8255A的内部由以下四部分组成:(1)端口A、端口B和端口C端口A、端口B和端口C都是8位端口,可以选择作为输入或输出。
接口芯片命令格式
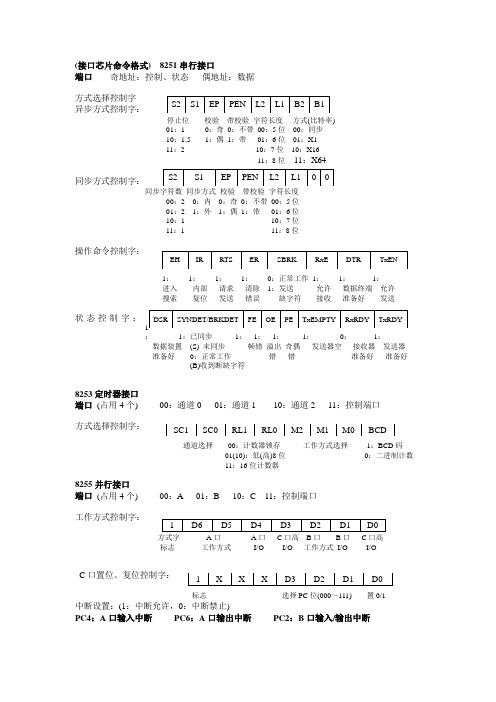
(接口芯片命令格式) 8251串行接口端口 奇地址:控制、状态 偶地址:数据方式选择控制字 异步方式控制字:停止位 校验 带校验 字符长度 方式(比特率)01:1 0:奇 0:不带 00:5位 00:同步10:1.5 1:偶 1:带 01:6位 01:X111:2 10:7位 10:X16 11:8位 11:X64同步方式控制字:同步字符数 同步方式 校验 带校验 字符长度00:2 0:内 0:奇 0:不带 00:5位01:2 1:外 1:偶 1:带 01:6位10:1 10:7位 11:1 11:8位操作命令控制字:1: 1: 1: 1: 0:正常工作 1: 1: 1:进入 内部 请求 清除 1:发送 允许 数据终端 允许搜索 复位 发送 错误 缺字符 接收 准备好 发送状态控制字: 1: 1:已同步 1: 1: 1: 1: 0: 1:数据装置 (S) 未同步 帧错 溢出 奇偶 发送器空 接收器 发送器准备好 0:正常工作 错 错 准备好 准备好(B)收到断缺字符8253定时器接口端口 (占用4个) 00:通道0 01:通道1 10:通道2 11:控制端口方式选择控制字:通道选择 00:计数器锁存 工作方式选择 1:BCD 码 01(10):低(高)8位 0:二进制计数 11:16位计数器8255并行接口端口 (占用4个) 00:A 01:B 10:C 11:控制端口工作方式控制字: 方式字 A 口 A 口 C 口高 B 口 B 口 C 口高 标志 工作方式 I/O I/O 工作方式 I/O I/OC 口置位、复位控制字:标志 选择PC 位(000~111) 置0/1 中断设置:(1:中断允许,0:中断禁止)PC4:A 口输入中断 PC6:A 口输出中断 PC2:B 口输入/输出中断 S2 S1 EP PEN L2 L1 B2 B1 S2 S1 EP PEN L2 L1 0 0 EH IR RTS ER SBRK R X E DTR T X EN DSR SYNDET/BRKDET FE OE PE T X EMPTY R X RDY T X RDYSC1 SC0 RL1 RL0 M2 M1 M0 BCD 1 D6 D5 D4 D3 D2 D1 D0 1 X X X D3 D2 D1 D0。