工业机器人大作业
机器人大作业

IRB1600型机器人的运动学分析及仿真目录1.引言................................................................................................................ - 2 -1.1 ABB公司简介.................................................................................... - 3 -1.2ABB发展历史 .................................................................................... - 4 -2. IRB1600 ........................................................................................................ - 5 -2.1 IRB1600的资料................................................................................. - 6 -2.2建立基于D-H方法的连杆坐标系 ................................................... - 8 -2.3建立六自由度点焊机器人的运动学方程....................................... - 10 -3. 虚拟样机的建立........................................................................................ - 12 -3.1 导入.................................................................................................. - 12 -3.2 添加约束副...................................................................................... - 13 -3.3 基于ADAMS的机器人运动学仿真 ............................................. - 14 -4. 结语............................................................................................................ - 18 -5. 参考资料.................................................................................................... - 19 -1.引言通过这学期对《机器人技术基础》这门课的学习,我对工业机器人有了一定的了解。
机器人技术及应用-大作业4
目录1 问题的描述 (1)2 问题解答 (2)2.0前言 (2)2.1分析自由度 (2)2.2-2.3位置反解与正解 (3)2.4奇异位形 (4)2.5工作空间 (6)2.6雅克比 (7)2.7力雅克比 (7)2.8柔度矩阵 (8)2.9机械图(3D) (8)2.10控制系统框图 (8)1 问题的描述如图1所示为并联机构简图,根据描述,求解一下各个问题。
图1 并联机构简图1.1自由度分析1.2位置反解1.3位置正解1.4奇异位形1.5工作空间1.6雅可比1.7力雅可比1.8柔度矩阵1.9机械图(3D)1.10控制系统框图(不写出具体参数,用字母代替就可以)单关节控制2 问题解答2.0前言并联机器人的结构中包含了一个或几个闭环,它是由一个或几个闭环组成的关节点坐标相互并联的机器人。
与传统的串联机器人相比,并联机器人刚度高、各向同性好、精度高,而且运动学反解求解简单,因此得到了广泛应用。
现对此机构进行运动学分析。
已有的二自由度并联机构多数为平面机构,这些机构都是使用移动副与转动副的组合,如将驱动装置固定在定平台,共有6种可能的机构构型,很多学者对其进行了研究与设计,其输出是机构上一点在一个平面上的移动。
在工程应用中,往往需要在平面内定位一个刚体,这就要求机构的输出是一个刚体的二维平动,高峰教授提出了平面二自由度并联机器人机构。
2.1分析自由度分析此机构的自由度,我们将并联机构图简化成图2所示简图进行分析。
图2 并联机构简图根据著名的G -K 公式,得如下自由度的计算公式:()∑=+--=ji i f j n F 11λ (1) 其中:λ——位形空间的维数;n——构件个数,含机架;j——运动副的个数;f i ——第i 个运动副的自由度数。
现在空间为平面,所以λ=3。
故:F =3(5−5−1)+5=2所以上述的并联机构的自由度为2,若该机构需要确定的运动,就需要两个原动构件。
2.2-2.3位置反解与正解图3所示为二自由度并联平面机构简图,其中1为固定平台,2为转动副,3为连杆,4为运动平台,5为滑块。
哈工大机器人大作业

一、运动学正解程序及结果1、程序:syms x1x2x3x4x5x6d1d2d4a2a3x d aRx=[1 0 0 0;0 cos(x) -sin(x) 0;0 sin(x) cos(x) 0;0 0 0 1];Rz=[cos(x) -sin(x) 0 0;sin(x) cos(x) 0 0;0 0 1 0;0 0 0 1];Tx=[1 0 0 a;0 1 0 0;0 0 1 0;0 0 0 1];Tz=[1 0 0 0;0 1 0 0;0 0 1 d;0 0 0 1];t=pi/180;y1=90;y2=-90;y3=-90;T01=subs(Rz,x,x1)*subs(Tz,d,d1)*subs(Rx,x,y1*t);T12=subs(Rz,x,x2)*subs(Tz,d,d2)*subs(Tx,a,a2);T23=subs(Rz,x,x3)*subs(Tx,a,a3)*subs(Rx,x,y3*t);T34=subs(Rz,x,x4)*subs(Tz,d,d4)*subs(Rx,x,y4*t);T45=subs(Rz,x,x5)*subs(Rx,x,90);T=T01*T12*T23*T34*T45;t=subs(T,{y1,y3,y4,y5},[pi/2,-pi/2,-pi/2,pi/2]);t= simplify(t);nx=t(1,1);ny=t(2,1);nz=t(3,1);ox=t(1,2);oy=t(2,2);oz=t(3,2);ax=t(1,3);ay=t(2,3);az=t(3,3);px=t(1,4);py=t(2,4);pz=t(3,4);结果:Nx=sin(x2 + x3)*cos(x1)*sin(x5) - cos(x5)*sin(x1)*sin(x4)+cos(x1)*cos(x2)*cos(x3)*cos(x4)*cos(x5) - cos(x1)*cos(x4)*cos(x5)*sin(x2)*sin(x3)Ny=cos(x1)*cos(x5)*sin(x4) + sin(x2 + x3)*sin(x1)*sin(x5)+cos(x2)*cos(x3)*cos(x4)*cos(x5)*sin(x1) - cos(x4)*cos(x5)*sin(x1)*sin(x2)*sin(x3)Nz=sin(x2 + x3)*cos(x4)*cos(x5) - cos(x2 + x3)*sin(x5)Ox=sin(x4)*(cos(x1)*sin(x2)*sin(x3) - cos(x1)*cos(x2)*cos(x3)) - cos(x4)*sin(x1)Oy=cos(x1)*cos(x4) - sin(x4)*(cos(x2)*cos(x3)*sin(x1) - sin(x1)*sin(x2)*sin(x3))Oz=-sin(x2 + x3)*sin(x4)Ax=cos(x1)*cos(x2)*cos(x3)*cos(x4)*sin(x5) - sin(x2 + x3)*cos(x1)*cos(x5) - sin(x1)*sin(x4)*sin(x5) - cos(x1)*cos(x4)*sin(x2)*sin(x3)*sin(x5)Ay=cos(x1)*sin(x4)*sin(x5) - sin(x2 + x3)*cos(x5)*sin(x1) + cos(x2)*cos(x3)*cos(x4)*sin(x1)*sin(x5) - cos(x4)*sin(x1)*sin(x2)*sin(x3)*sin(x5)Az=cos(x2 + x3)*cos(x5) + sin(x2 + x3)*cos(x4)*sin(x5)Px=d2*sin(x1) - d4*(cos(x1)*cos(x2)*sin(x3) + cos(x1)*cos(x3)*sin(x2)) + a2*cos(x1)*cos(x2) + a3*cos(x1)*cos(x2)*cos(x3) - a3*cos(x1)*sin(x2)*sin(x3)Py=a2*cos(x2)*sin(x1) - d2*cos(x1) - d4*(cos(x2)*sin(x1)*sin(x3) + cos(x3)*sin(x1)*sin(x2)) + a3*cos(x2)*cos(x3)*sin(x1) - a3*sin(x1)*sin(x2)*sin(x3)Pz=d1 + d4*cos(x2 + x3) + a3*sin(x2 + x3) + a2*sin(x2)二、绘制工作空间(一)正解1、程序syms x1x2x3x4x5x6d1d2d4a2a3x d aRx=[1 0 0 0;0 cos(x) -sin(x) 0;0 sin(x) cos(x) 0;0 0 0 1];Rz=[cos(x) -sin(x) 0 0;sin(x) cos(x) 0 0;0 0 1 0;0 0 0 1];Tx=[1 0 0 a;0 1 0 0;0 0 1 0;0 0 0 1];Tz=[1 0 0 0;0 1 0 0;0 0 1 d;0 0 0 1];t=pi/180;T01=subs(Rz,x,x1)*subs(Tz,d,d1)*subs(Rx,x,90*t);T12=subs(Rz,x,x2)*subs(Tz,d,d2)*subs(Tx,a,a2);T23=subs(Rz,x,x3)*subs(Tx,a,a3)*subs(Rx,x,-90*t);T34=subs(Rz,x,x4)*subs(Tz,d,d4)*subs(Rx,x,-90*t);T45=subs(Rz,x,x5)*subs(Rx,x,90);T=T01*T12*T23*T34*T45;Px=T(1,4);Py=T(2,4);Pz=T(3,4);k=1;for th1=-160*t:10*t:160*tfor th2=-225*t:10*t:45*tfor th3=-45*t:10*t:225*tpx(k)=subs(Px,{x1,x2,x3,a2,a3,d1,d2,d4},[th1,th2,th3,431.8,20.32, 0,149.09,433.07]);py(k)=subs(Py,{x1,x2,x3,a2,a3,d1,d2,d4},[th1,th2,th3,431.8,20.32, 0,149.09,433.07]);pz(k)=subs(Pz,{x1,x2,x3,a2,a3,d1,d2,d4},[th1,th2,th3,431.8,20.32, 0,149.09,433.07]);k=k+1;endendendplot3(px,py,pz,'.');grid on2、结果俯视图3、总结:1).从图形看出,PUMA工作空间是一个中间为圆柱空心的椭球区域。
机器人技术及应用-大作业1
机器⼈技术及应⽤-⼤作业1⼀、D-H参数⼆、各连杆变换矩阵将D-H参数代⼊到连杆变换矩阵,得:三、各连杆⾄末端连杆的变换矩阵T43=T43T42=T32*T43;T41=T21*T42;Matlab 编程:clcclear allsyms af a d th realsyms d2 th1 th3 th4 realDH=[ 0 0 0 th1 ;-90 0 d2 0 ;90 0 0 th3 ;90 0 60 th4 ]; %DH参数for i=1:4af=DH(i,1) ; %取出DH参数a=DH(i,2) ;d=DH(i,3) ;th=DH(i,4);T{i}=[cos(th) -sin(th) 0 a;sin(th)*cos(af) cos(th)*cos(af) -sin(af) -d*sin(af) ; sin(th)*sin(af) cos(th)*sin(af) cos(af) d*cos(af) ;0 0 0 1 ] ; %连杆变换⽅程endT10=T{1}T21=T{2}T32=T{3}T43=T{4}T42=T32*T43T41=T21*T42四、雅可⽐矩阵雅可⽐矩阵结果:Matlab编程:clcclear allsyms d2 realsyms th1 th3 th4 realT21 =[ 1, 0, 0, 0;0, cos(90), sin(90), d2*sin(90);0, -sin(90), cos(90), d2*cos(90);0, 0, 0, 1];T32 =[ cos(th3), -sin(th3), 0, 0;cos(90)*sin(th3), cos(90)*cos(th3), -sin(90), 0;sin(90)*sin(th3), sin(90)*cos(th3), cos(90), 0;0, 0, 0, 1];T44=[ 1, 0, 0, 0;0, 1, 0, 0;0, 0, 1, 0;0, 0, 0, 1];T43 =[ cos(th4), -sin(th4), 0, 0;cos(90)*sin(th4), cos(90)*cos(th4), -sin(90), -60*sin(90); sin(90)*sin(th4), sin(90)*cos(th4), cos(90), 60*cos(90); 0, 0, 0, 1];T42=T32*T43n1=T41(1:3,1);o1=T41(1:3,2);a1=T41(1:3,3);p1=T41(1:3,4);n2=T42(1:3,1);o2=T42(1:3,2);a2=T42(1:3,3);p2=T42(1:3,4);n3=T43(1:3,1);o3=T43(1:3,2);a3=T43(1:3,3);p3=T43(1:3,4);n4=T44(1:3,1);o4=T44(1:3,2);a4=T44(1:3,3);p4=T44(1:3,4);Sp1=[0 -p1(3) p1(2);p1(3) 0 -p1(1);-p1(2) p1(1) 0] ; %位置⽮量的反对称矩阵Sp2=[0 -p2(3) p2(2);p2(3) 0 -p2(1);p2(2) p2(1) 0];Sp3=[0 -p3(3) p3(2);p3(3) 0 -p3(1);p3(2) p3(1) 0];Sp4=[0 -p4(3) p4(2);p4(3) 0 -p4(1);p4(2) p4(1) 0];pxn1=Sp1*n1;pxo1=Sp1*o1;pxa1=Sp1*a1;pxn2=Sp2*n2;pxo2=Sp2*o2;pxa2=Sp2*a2;pxo3=Sp3*o3;pxa3=Sp3*a3;pxn4=Sp4*n4;pxo4=Sp4*o4;pxa4=Sp4*a4;JL1=[pxn1(3) pxo1(3) pxa1(3)].' ;JL2=[pxn2(3) pxo2(3) pxa2(3)].' ;JL3=[pxn3(3) pxo3(3) pxa3(3)].' ;JL4=[pxn4(3) pxo4(3) pxa4(3)].' ;Ja1=[n1(3) o1(3) a1(3)].' ;Ja2=[n2(3) o2(3) a2(3)].' ;Ja3=[n3(3) o3(3) a3(3)].' ;Ja4=[n4(3) o4(3) a4(3)].' ;J1=[JL1 ; Ja1] ;J2=[JL2 ; Ja2] ;J3=[JL3 ; Ja3] ;J4=[JL4 ; Ja4] ;Jn=[J1 J2 J3 J4];JJn=vpa(Jn,2)五、关节驱动⼒如下图所⽰,杆各长设为li,受外⼒4F=(fx,fy)T静⼒传递:关节驱动⼒:设⼿抓坐标系原点受⼒:4F=[fx,fy,0]T 杆3受⼒:=fz fx f 033-=???=3030010*333fxl fzl fz fx l n杆2受⼒:-+=--===fz c fz s c fx s fz s s fx c fz fx c s s c c c s s s s c c f x R z R f R f 22112110*2202121121121)*,(*),(3321332322θθ-++-=?+=32232131321313332332322fxl c fxl fxl s c fzl s fxl s s fzl c f P n R n杆1受⼒:+---+=??-+-===fz c c fzs c fxs s fzs c fzs c fxs c s fzs fx c fz c fz s c fx s fz s s fx c c s s c f x R f R f 21)211(112)211(12112211211*110110001)*1,(22221211θ-+++++-=?+=321)231132(1132)231132(1213312221221211fxl c c s fxl c s fzl fxl s s fxl c s fxl c s fzl fxl c s s fxl fzl c f P n R n关节驱动⼒:关节1为转动关节:321)231132(11fxl c c s fxl c s fzl fxl s -++=τ关节2为移动关节:fz c 22=τ关节3为转动关节:33fxl -=τ六、速度与加速度分析操作臂的速度和加速度分析该机械⼿由四个关节组成,其中第⼆个关节为移动关节其余三个为转动关节,俩个连杆为l1和l2,应⽤递推法对末端构件的速度、⾓速度和雅克⽐矩阵计算如下所⽰,平⾯简图如下所⽰。
机器人技术基础大作业格式
《机器人技术基础》大作业题目:班级:姓名:成绩:一、机器人功能描述(200字)具有供人观赏,娱乐为目的,具有机器人的外部特征,也可以像人,像某种动物等。
同时具有机器人的功能,可以行走或完成动作,有语言能力,会唱歌,有一定的感知能力,可以自主的连续表演事先编好的多套动作。
二、机器人系统的功能构成(框图+文字说明)驱动:电动传动机械结构系统:感受系统:智能传感器基本思路:通过对人类动作的深入了解,分析人类的动作特性,并且与控制对象跳舞机器人的工作原理、动作过程进行比较,从而确定机器人的基本构成并选择合适的机械构件,组装完成机器人的造型。
分析机器人动作的局限性与优势,设定机器人的舞蹈动作,按动作编写程序,完成作品设计。
跳舞机器人的结构完全模仿真人,并实现了双腿分立走路,双臂有很强的自由度,可以完成多种高难度动作。
机器人的双脚为轮式结构,这样不仅可以实现转身和滑步,更突出的优点是在走路时减少了重心的调整,从而减少了机器人的倾斜度,实现了类似真人的走路及跳舞模式。
舞蹈机器人的控制方式是将uC/OS-Ⅱ操作系统嵌入Atmega128处理器中,采用PID算法,对电机、舵机进行实时可靠的控制,进而对机器人主动轮的速度、方向进行有效的控制,使机器人的动作定位更加准确,动作过程更加优美协调。
机器人的双脚为轮式结构,此结构可以很完美地实现转身和滑步。
更突出的优点是在走路时减少了重心的调整,同时也克服了塑料构件机械强度不够高的局限性。
跳舞机器人完全实现了智能化运行,可以用相应软件通过编程实现对舵机的控制,做出各种不同的动作,带给人们另类娱乐。
它可以走进各种不同的场合,如:在学校用于科技教育学习;在家庭用于提供丰富的生活享受;用于社会可以增加更多的新型娱乐项目等。
随着社会对服务业的需求不断扩大,可以代替人的机器人将会有更广阔的前景从近几年世界范围内推出的机器人产品来看,机器人技术正在向智能化、模块化和系统化的方向发展。
其发展趋势主要为:结构的模块化和可重构化;控制技术的的开放化;PC化和网络化;伺服驱动技术的数字化和分散化。
机器人课程考核大作业

《机器人技术基础》课程考核大作业一、进行课程学习考核(大作业形式)的目的:工业机器人系统设计是专业选修课的一个理论与实践相结合的教学环节,是机械类基础课程的延伸,可以巩固和加强机械类基础课程学习和工程应用知识的拓展,可以为毕业设计和就业工作打下良好基础,其目的是:1、通过资料查询与整理,联系生产实际,运用所学过的知识,使学生得到对课题的论证与分析、问题解决对策、自主学习、团队合作等能力的培养。
2、利用机械类的前序课知识,学会并掌握工业机器人系统设计的特点及方法,学会并掌握工业机器人系统设计中“总体方案设计”、“参数设计”、“组成机构原理与分析”、“机械结构装置设计”、“控制系统设计”等方面的一般方法和技术要求。
3、加强机械设计中基本技能的训练,如:设计计算能力,运用有关设计资料、设计手册、标准、规范及经验数据的能力,以及机械、电气系统的综合运用能力。
二、同学可以选择的课题领域:(01)玻璃、陶瓷加工业用的工业机器人(02)化学工业中应用的工业机器人(03)建筑行业应用的工业机器人(04)塑料工业中应用的工业机器人(如:装配、搬运)(05)用于包装工业的工业机器人(06)电气和电子工业中应用的工业机器人:工件搬运和存放的工业机器人(07)医疗行业应用的工业机器人(如:医疗、残疾、家庭)(08)用于金属生产和加工的工业机器人(铸造机器人)(09)用于木加工业的工业机器人:木加工行业装配和搬运的工业机器人(10)用于食品供应和加工的工业机器人:食品工业中的装配和搬运的工业机器人(11)承担复杂机具搬运任务的工业机器人(12)搬运和托盘堆码应用的工业机器人(13)普通机械制造领域的装配和搬运作业的工业机器人(14)用于机床上下料件的工业机器人(15)用于粘接和密封的工业机器人(16)锻冶场所装卸的工业机器人(17)金属生产和加工业的装配和搬运的工业机器人(18)用于压铸和注模成型机装卸的工业机器人(19)用于车辆制造的焊接工业机器人(20)用于车辆制造的装配工业机器人(21)用于仓储、材料管理和控制及后勤的工业机器人:一般工厂自动化装配和搬运系统三、设计内容与要求:1.介绍所选工业机器人系统的组成及各部分的关系,理解其机、电组成系统的要求(包括:需求分析、功能分析与分解、功能求解与集成、设计方案的形成、方案的评价等),掌握工业机器人系统方案设计的主要进程以及各阶段的主要工作内容,初步领会工业机器人系统的设计方案及一般程序。
机器人大作业综述
IRB1600型机器人的运动学分析及仿真目录1.引言................................................................................................................ - 2 -1.1 ABB公司简介.................................................................................... - 3 -1.2ABB发展历史 .................................................................................... - 4 -2. IRB1600 ........................................................................................................ - 5 -2.1 IRB1600的资料................................................................................. - 6 -2.2建立基于D-H方法的连杆坐标系 ................................................... - 8 -2.3建立六自由度点焊机器人的运动学方程....................................... - 10 -3. 虚拟样机的建立........................................................................................ - 12 -3.1 导入.................................................................................................. - 12 -3.2 添加约束副...................................................................................... - 13 -3.3 基于ADAMS的机器人运动学仿真 ............................................. - 14 -4. 结语............................................................................................................ - 18 -5. 参考资料.................................................................................................... - 19 -1.引言通过这学期对《机器人技术基础》这门课的学习,我对工业机器人有了一定的了解。
大作业(搬运机器人)

无锡科技职业学院中德机电学院
工业机器人技术大作业
设计题目搬运机器人设计与检修
学生姓名
系别控制系
专业
班级
授课教师龚运新
大作业的内容和要求(含技术要求、图表要求等):
1、论述搬运机器人的机械设计部分
⑴叙述搬运机器人机械各部分名称及功能
⑵各部件图纸设计及要求(最低画出一个部件图纸)
2、叙述搬运机器人电气设计各部分名称及功能
3、画出搬运机器人电气控制电路图
4、编写部分搬运机器人控制子程序
5、叙述搬运机器人故障检修方法
1。
机器人技术大作业

《机器人技术》大作业(2015年秋季学期)题目工业机器人概述姓名学号班级专业机械设计制造及其自动化报告提交日期2015年12月5日哈尔滨工业大学内容及要求1.以某种机器人(如搬运、焊接、喷漆、装配等工业机器人;服务机器人;仿生鱼、蛇等仿生机器人;军用及其它机器人等)为例,撰写一篇大作业,题目自拟,以下内容仅作参考:1) 机器人的机械结构设计(包括各部分名称、功能、传动等);2) 机器人的运动学及动力学分析;3) 机器人的控制及轨迹规划;4) 驱动及伺服系统设计;5) 电气控制电路图及部分控制子程序。
2.题目自拟,拒绝雷同和抄袭;3.参考文献不少于7篇,其中至少有2篇外文文献;4.报告统一用该模板撰写,字数不少于5000字,上限不限;5.正文为小四号宋体,倍行距;图表规范,标注为五号宋体;6.用A4纸单面打印;左侧装订,1枚钉;7.提交打印稿及03版word电子文档,由班长收齐。
8.此页不得删除。
评语:成绩(20分):教师签名:年月日工业机器人概述机器人学是当今世界极为活跃的研究领域之一,它涉及计算机科学、机械学、电子学、自动控制、人工智能等多种学科。
随着计算机、人工智能和光机电一体化技术的迅速发展,机器人已经成为人类的好帮手。
在航空航天,深海探测中,往往使用机器人代替人类去完成复杂的极限工作任务。
工业机器人是一个多功能、多自由度的机械和电气一体化的自动机械设备和系统,它可以在制造过程中完成各种任务。
它结合制造主机或生产线,可以形成一个单一的或多台机器自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。
目前,工业机器人技术飞速发展,在生产中的应用日益广泛,已成为现代制造业重要的生产高度自动化设备。
一、工业机器人特性自20世纪60年代美国第一代机器人的开始,工业机器人的发展和应用迅速发展起来,工业机器人的最重要的特性概括如下。
1、可编程。
生产自动化的进一步发展是柔性自动化。
工业机器人能根据工作环境不同、做出相应规划和变化,因而在小批量多品种的高效柔性制造过程可以起到很好的作用,是柔性制造系统(FMS)的重要组成部分。
【免费下载】工业机器人设计大作业

设计题目: 自动切割机
系 别: 机械系
专 业: 机械设计制造及其自动化
姓 名: 聂建波
郭锐
张少强
1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保据过护生管高产线中工敷资艺设料高技试中术卷资,配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高与中带资负料荷试下卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并3中试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内 纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
机器人 运动 大作业

《工业机器人》大作业学院:机电与信息工程学院专业:机械设计制造及其自动化年级:2008级姓名:李笑春学号:200800840072机器人运动学及动力学分析随着社会发展的进步,人们的生活当中大部分的事物都实现了自动化,工业生产也不例外。
作为支撑社会乃至国家生产水平的一个标准,工业生产当中的自动化已经变得尤为重要。
这其中,当属工业机器人发挥的作用最大。
那么工业机器人到底是怎样完成它的每一个动作的呢?我们就要从机器人的运动学和动力学方面进行分析。
(一)机器人运动学正解分析:以坐标系2建立模型:1.确定D-H坐标系全为转动关节:Zi坐标轴:沿着i+1关节的运动轴;Xi坐标轴:沿着Zi和Zi-1的公法线,指向离开Zi-1轴的方向;Yi坐标轴:按右手直角坐标系法则制定;连杆长度ai; Zi和Zi-1两轴心线的公法线长度;连杆扭角αi: Zi和Zi-1两轴心线的夹角;两连杆距离di: Xi和Xi-1两坐标轴的公法线距离;两杆夹角θi : Xi和Xi-1两坐标轴的夹角;2.确定各连杆D-H参数和关节变量3.求出两杆间的位姿矩阵T1=[c1 -s1 0 0;s1 c1 0 0;0 0 1 0;0 0 0 1] T2=[c2 -s2 0 0;0 0 1 d2;-s2 -c2 0 0;0 0 0 1]T3=[c3 -s3 0 a2;s3 c3 0 0;0 0 1 0;0 0 0 1] T4=[c4 -s4 0 a3;0 0 1 d4;-s4 -c4 0 0;0 0 0 1]T5=[c5 -s5 0 0;0 0 -1 0;s5 c5 0 0;0 0 0 1] T6=[c6 -s6 0 0;0 0 1 0;-s6 -c6 0 0;0 0 0 1]4.求末杆的位姿矩阵1sn c n x ==5.正解如下:function ZHENGJIE(X1,X2,X3,X4,X5,X6,a2,a3,d2,d4)NX=sin(X1/180*pi)*(cos(X4/180*pi)*sin(X6/180*pi)+cos(X5/180*pi)*cos(X6/180*pi)*sin(X4/180*pi))-cos(X1/180*pi)*((si n(X4/180*pi)*sin(X6/180*pi)-cos(X4/180*pi)*cos(X5/180*pi)*cos(X6/180*pi))*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi))+cos(X6/180*pi)*sin(X5/180*pi)*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi));)()()()()()(66555444333222111060θθθθθθT T T T T T T =NY=-sin(X1/180*pi)*((sin(X4/180*pi)*sin(X6/180*pi)-cos(X4 /180*pi)*cos(X5/180*pi)*cos(X6/180*pi))*(cos(X2/180*pi)*c os(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi))+cos(X6/180*p i)*sin(X5/180*pi)*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/1 80*pi)*sin(X2/180*pi)))-cos(X1/180*pi)*(cos(X4/180*pi)*si n(X6/180*pi)+cos(X5/180*pi)*cos(X6/180*pi)*sin(X4/180*pi) );NZ=(sin(X4/180*pi)*sin(X6/180*pi)-cos(X4/180*pi)*cos(X5/1 80*pi)*cos(X6/180*pi))*(cos(X2/180*pi)*sin(X3/180*pi)+cos (X3/180*pi)*sin(X2/180*pi))-cos(X6/180*pi)*sin(X5/180*pi) *(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180 *pi));OX=sin(X1/180*pi)*(cos(X4/180*pi)*cos(X6/180*pi)-cos(X5/1 80*pi)*sin(X4/180*pi)*sin(X6/180*pi))-cos(X1/180*pi)*((co s(X6/180*pi)*sin(X4/180*pi)+cos(X4/180*pi)*cos(X5/180*pi) *sin(X6/180*pi))*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/18 0*pi)*sin(X3/180*pi))-sin(X5/180*pi)*sin(X6/180*pi)*(cos( X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi));OY=-sin(X1/180*pi)*((cos(X6/180*pi)*sin(X4/180*pi)+cos(X4 /180*pi)*cos(X5/180*pi)*sin(X6/180*pi))*(cos(X2/180*pi)*c os(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi))-sin(X5/180*p i)*sin(X6/180*pi)*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/1 80*pi)*sin(X2/180*pi)))-cos(X1/180*pi)*(cos(X4/180*pi)*co s(X6/180*pi)-cos(X5/180*pi)*sin(X4/180*pi)*sin(X6/180*pi) );OZ=(cos(X6/180*pi)*sin(X4/180*pi)+cos(X4/180*pi)*cos(X5/1 80*pi)*sin(X6/180*pi))*(cos(X2/180*pi)*sin(X3/180*pi)+cos (X3/180*pi)*sin(X2/180*pi))+sin(X5/180*pi)*sin(X6/180*pi) *(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180 *pi));AX=-cos(X1/180*pi)*(cos(X5/180*pi)*(cos(X2/180*pi)*sin(X3 /180*pi)+cos(X3/180*pi)*sin(X2/180*pi))+cos(X4/180*pi)*si n(X5/180*pi)*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi )*sin(X3/180*pi)))-sin(X1/180*pi)*sin(X4/180*pi)*sin(X5/1 80*pi);AY=cos(X1/180*pi)*sin(X4/180*pi)*sin(X5/180*pi)-sin(X1/18 0*pi)*(cos(X5/180*pi)*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi))+cos(X4/180*pi)*sin(X5/180*pi)*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi)));AZ=cos(X4/180*pi)*sin(X5/180*pi)*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi))-cos(X5/180*pi)*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi);PX=cos(X1/180*pi)*(a2*cos(X2/180*pi)+a3*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi))-d4*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi)))-d2*sin(X1/180*pi);PY=cos(X1/180*pi)*d2+sin(X1/180*pi)*(a2*cos(X2/180*pi)+a3*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi))-d4*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi)));PZ=-a2*sin(X2/180*pi)-a3*(cos(X2/180*pi)*sin(X3/180*pi)+cos(X3/180*pi)*sin(X2/180*pi))-d4*(cos(X2/180*pi)*cos(X3/180*pi)-sin(X2/180*pi)*sin(X3/180*pi));T=[NX OX AX PX;NY OY AY PY;NZ OZ AZ PZ;0 0 0 1];验证:>> ZHENGJIE(pi/2,0,-pi/2,0,0,0,431.8,20.32,149.09,433.07)T =0 1.0000 0 -149.09000 0 1.0000 864.87001.0000 0 0 20.32000 0 0 1.0000(二)机器人运动学逆解分析:依然以坐标系2进行分析。
机器人技术基础大作业整理版

KUKA KR40PA码垛机器人运动学仿真目录摘要 (3)1 引言 (4)1.1机器人发展 (4)1.1.1 发展 (4)1.1.2 现状 (5)2 KUKA机器人综述 (6)2.1 公司简介 (6)2.2 产品 (6)3 机器人理论基础 (7)3.1.求正运动学公式 (7)3.2运动学逆解 (8)3.3 静力分析 (9)4机器人建模 (10)4.1问题描述 (10)4.2模型描述 (10)5 仿真 (11)5.1 轨迹规划 (11)5.2特征曲线 (13)5.2.1 位移曲线 (13)5.2.2 速度曲线 (14)5.2.3 加速度曲线 (16)总结 (17)参考文献 (18)摘要本次作业主要针对KUKA KR40PA码垛机器人进行运动学仿真,根据已知的条件和需要以KUKA机器人为研究对象,对KUKA机器人进行运动学仿真,通过讨论该机器人的运动学问题,然后在matlab环境下,用simmechanics工具箱对该机器人的正运动学、逆运动学、轨迹规划进行了仿真, 通过仿真,观察到了机器人各个关节的运动,并得到了所需的数据,从而能够达到预定的目标.关键字:KUKA KR40PA码垛机器人运动学仿真 matlab1 引言1.1机器人发展1.1.1 发展虽然机器人已经历了30 多个春秋, 繁衍了三代, 是一个拥有几十万台机器人的大家族, 可是至今还没有统一的定义。
什么叫做机器人? 在世界范围内, 对于什么是机器人, 以及什么不属护机器人, 在看法上存在着很大的差差别。
为此在第18 届ISIR (国际机器人学术讨论会)期间, 专门成立了一个工作小组, 它的任务是制定机器人分类的标准, 并确定机器人数量的原则。
总之,不管机器人的定义如何, 现在的工业机器人已从原来概念的“纲领工人”或“通用自动机”逐步演进为从事专门任务的柔性机械。
进入80年代以后, 机器人的发展十分迅速。
198 0年, 全世界工业机器人仅有1万多台,可是到1984 年,除了中国、前苏联和东欧国家之外,全世界已有工业机器人102444 台, 其中以日本为最多, 高达4.4万台, 其次是美国,共有1.3万台, 以下依次是: 德国6600台、法国3380台、瑞典2400台。
工业机器人技术课后作业

成绩:《工业机器人》大作业学期:2014~2015学年第一学期指导教师:李敏姓名:学号:年级、专业:2011级机制班西南交通大学峨眉校区机械工程系2.6 已知齐次变换矩阵H=0100001010000001⎡⎤⎢⎥-⎢⎥⎢⎥-⎢⎥⎣⎦要求ot(,)R θƒ=H 。
确定ƒ和θ的值解:0100001010000001H ⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥⎣⎦,∴由式(2.46)得001x y z n n n =⎧⎪=⎨⎪=-⎩;100x y z o o o =⎧⎪=⎨⎪=⎩;010x y z a a a =⎧⎪=-⎨⎪=⎩; 由式(2.48)得:111cos (1)(0001)222x y z n o a θ=++-=++-=- 又:把旋转规定为绕矢量ƒ的正向旋转,使得0≤θ≤180 ,故120θ= 。
由式(2.52)得:2sin 3z y x o a θ-ƒ===2sin x z y a n θ-ƒ===;2sin 3y x z n o θ-ƒ===-综上,=⎡⎤⎢⎥⎢⎥⎢⎥ƒ⎢⎥⎢⎢⎢⎢⎥⎣⎦,120θ=。
2.10 {A}和{B}两坐标系仅仅方向不同。
坐标系{B}是这样得到的:首先与坐标系{A}重合,然后绕单位矢量ƒ旋转θ弧度,即()AA B B R R θ=ƒ,求证A B R e θƒ= ,式中 000z y zx y x⎡⎤-ƒƒ⎢⎥ƒ=ƒ-ƒ⎢⎥⎢⎥-ƒƒ⎣⎦ 证明:cos sin f e f θθθ=+ 且000zy zx y xf f f f f f f ⎡⎤-⎢⎥=-⎢⎥⎢⎥-⎣⎦0sin sin cos sin 0sin sin sin 0z y f z x y x f f e f f f f θθθθθθθθ⎡⎤-⎢⎥∴=+-⎢⎥⎢⎥-⎣⎦···········(a )根据式(2.45)和式(2.47),令=ot()R R θƒ, 即0000000101xx x x x y x z z x y y y y x yz y y z y x z z z x z y y z x z z n o a f f vers c f f vers f s f f vers f s n o a f f vers f s f f vers c f f vers f s n o a f f vers f s f f vers f s f f vers c θθθθθθθθθθθθθθθθθθ+-+⎡⎤⎡⎤⎢⎥⎢⎥++-⎢⎥⎢⎥=⎢⎥⎢⎥-++⎢⎥⎢⎥⎣⎦⎣⎦··(b ) 由已知:()A A B B R R θ=ƒ,,将此式作式(b )变换,可得=0x y f f vers θ,即cos =0θ1-,则=90θ 。
西北工业大学学科前沿技术讲座大作业-工业机器人技术在飞机装配
西北工业大学学科前沿技术讲座大作业-工业机器人技术在飞机装配工业机器人技术在飞机装配中的应用和发现70 年代初,全球开发了第一台电气机器人,这项技术在恶劣环境下替代了人工劳动,比如点焊、弧焊和搬运,创造了一个大型作业空间和巨大柔性。
随着当今飞机结构设计复杂性的增加及数字化装配技术难度的提高,越来越多的依靠人力手工完成的装配工作或其他复杂制造环节的工作已无法继续按传统的方式实现。
而随着集成制造技术发展起来的工业机器人技术,则开始被航空制造业所关注和运用。
经查询相关资料,飞机装配中的主要工作环节可分为以下五部分:(1)壁板级装配环节;(2)半壳体装配;(3)部段舱段装配;(4)舱段对接装配;(5)翼身对接装配。
我国20 世纪80 年代,开始对机器人技术进行研究和开发,目前仍然没有形成完整的自主研发的实用性技术体系。
在航空领域还没有针对飞机装配特定环节的专用机器人、机械臂,我国航空企业所使用的机器人系统绝大多数都是国外采购,国内并无该方面的自主研发设备和技术。
并且,由于航空工业的高精度、高效率、低成本等要求,使得该系统技术还未能在航空专用制造领域中被充分利用。
然而,机器人灵巧,柔性好;应用广泛,用途多;体积小,机动性好;环境适应性强,生产效率高;制造成本低,批量大;便于维护,服务成本低的特点使得其在飞机装配中的重要性越来越明显。
工业机器人具体包括以下8 项主要技术:(1)自动化切割切割机器人能满足切割零件高精度的要求,完成高质量工作,它包括火焰切割、等离子切割和激光切割等,也可以实现对飞机壁板的自动化修边,采用工业智能机器人能够更高效、更便捷、更精准地完成零组件切边工作。
(2)机器人自动制孔与连接技术机器人自动制孔由机器人完成末端执行器的精确定位和定姿,由末端执行器完成钻头的旋转及进给,由监测及标定系统对加工过程及定位精度进行实时测量,整个系统由中央控制器控制工艺顺序,跟踪数据。
(3)测量辅助机器人数字化装配定位机器人装配系统的核心技术有虚拟仿真、定位定姿、实时监视跟踪。
黑龙江哈尔滨工业大学机械课程机器人技术课程大作业
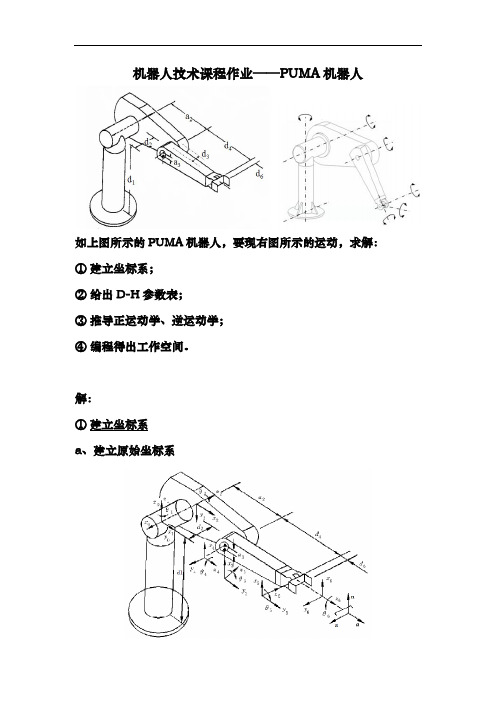
机器人技术课程作业——PUMA机器人如上图所示的PUMA机器人,要现右图所示的运动,求解:①建立坐标系;②给出D-H参数表;③推导正运动学、逆运动学;④编程得出工作空间。
解:①建立坐标系a、建立原始坐标系b 、坐标系简化② 给出D-H 参数表a 、PUMA 机器人的杆件参数1d 0.6604m =,2d 0.14909m =,4d 0.43307m =,6d 0.05625m = 2a 0.4318m =,3a 0.02032m =b 、D-H 参数表关节i i θ i α i L i d运动围 1 90 0 0 0-160o ~160o2 0 -90 02d 0.14909m = -225o ~45o3-902a 0.4318m =-45o ~225o4 0 -90 3a 0.02032m = 4d 0.43307m =-110 o~170 o 590-100 o~100 o③ 推导正运动学、逆运动学 a 、正运动学推导由式111111111100001ii i i i i i i i i i ii i i i i i i c s a s c c c s d s T s s c s c d c θθθαθαααθαθααα-----------⎡⎤⎢⎥--⎢⎥=⎢⎥⎢⎥⎣⎦可得: 111101000000100001c s s c T -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦222122200001000001c s d T s c -⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥⎣⎦33233230000010001c s a s c T -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦44343444000100001c s a d T s c -⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥⎣⎦ 554555000010000001c s T s c -⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦ 665666000010000001c s T s c -⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥⎣⎦由00123456123456T T T T T T T =,得机械手变换矩阵:601x x x x yy y y z z z z n o a p n o a p T n o a p ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦23654164123651654164123654164123651654164123654642365()()()x y z n c c c c c s s c s c s c c c s s s c s n c c c c s s s s s c s s c c s c s c c n s c c c s s c c s =--++=----=--- 23654164123651654164123654164123651645164123654642365()()()x y z o c s c c c c s c s s s c s c s s c c s o c s c c s c s s s s s s s s c c c c c o s s c c s s c c s =-++-+=-+++-=++2354123515412354123515412352354x y z a c s c c s c c s s s a c s c s s c s s s c a c c s s c =---=--+=-+3231221423121323122142312142332322x y z p a c c a c c d s c d s p a c s a c s d s s d c p d c a s a s =+--=+-+=---b 、逆运动学推导 1).求1θ用逆变换011T -左乘方程00123456123456T T T T T T T =两边:10123451623456T T T T T T T -=11111600000010000101xx x x yy y y zz z z c s n o a p s c n o a p T n o a p ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦得112x y s p c p d -+=三角代换 cos x p ρφ=,sin y p ρφ=式中,ρ=tan 2(,)x y a p p φ=得到1θ的解12a tan 2(,)a tan 2(,y x p p d θ=-2).求3θ矩阵方程两端的元素(1,4)和(2,4)分别对应相等113232242342332322x y z c p s p a c a c d s p d c a s a s +=+-⎧⎨-=++⎩ 平方和为:4333d s a c k += 其中 2222222242322x y z p p p d d a a k a ++----=解得:334a tan 2(,)a tan 2(,a d k θ=- 3).求θ在矩阵方程00123456123456T T T T T T T =两边左乘逆变换013T -。
机器人技术大作业

机器人技术大作业:PUMA机器人作业要求:1.建立坐标系;2.给出D-H参数表;3.推导正运动学,逆运动学;4.编程得出工作空间;1.建立坐标系由坐标系的建立规则:Oi:设在Li与Ai+1轴线的交点上;Zi轴:与Ai+1关节轴重合,指向任意;Xi轴:与公法线Li重合,指向沿Li由Ai轴线指向Ai+1轴线;Yi轴:按右手定则确定;可以建立PUMA机器人各关节坐标系如下:图1 PUMA机器人各关机坐标系2.给出D-H参数表由各参数的确定规则:杆件长度Li:沿xi 轴,zi-1 轴与xi 轴交点到0i 的距离;杆件扭转角αi:绕xi 轴,由zi-1 转向zi;杆件偏移量di:沿zi-1 轴,zi-1 轴和xi 交点至∑0i –1 坐标系原点的距离;杆件回转角θi:绕zi-1 轴,由xi-1转向xi;可以得到PUMA机器人的D-H参数表:表1 PUMA 机器人D-H 参数表3. 推导正运动学,逆运动学解3.1正运动学以下以c 代表cos 函数,s 代表sin 函数 由D-H 参数表易得:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=100001000001111110d c s s c T θθθθ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10001000022222222221d s a c s c a s c T θθθθθθ ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10000010003333333332θθθθθθs a c s c a s c T ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=100001000004444443d c s s c T θθθθ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1000100000555554θθθθc s s c T ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10010000006666665d c s s c T θθθθ将以上六个矩阵依次右乘,即可得到末端机械手的齐次变换矩阵:65544332211060T T T T T T T =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1060z z z z y y y yx x x x p a o n p a o n p a o n T 利用MATLAB 程序可以求出此变换矩阵各参数: syms a2 d2 a3 d4 d6syms c1 s1 c2 s2 c3 s3 c4 s4 c5 s5 c6 s6 T01=[c1 0 -s1 0;s1 0 c1 0;0 -1 0 d1;0 0 0 1]; T12=[c2 -s2 0 a2*c2;s2 c2 0 a2*s2;0 0 1 d2;0 0 0 1]; T23=[c3 0 -s3 a3*c3;s3 0 c3 a3*s3;0 -1 0 0;0 0 0 1]; T34=[c4 0 -s4 0;s4 0 c4 0;0 -1 0 d4;0 0 0 1]; T45=[c5 0 -s5 0;s5 0 c5 0;0 -1 0 0;0 0 0 1]; T56=[c6 -s6 0 0;s6 c6 0 0;0 0 1 d6;0 0 0 1]; T06=T01*T12*T23*T34*T45*T56 得到:nx=c6(s5c1s23 + c5(s1s4+c4c1c23)) - s6(c4s1 - s4c1c23) ny=c6(s5s1s23 - c5(c1s4-c4s1c23)) + s6(c1c4 + s4s1c23) nz=c6s5c23-c4c5s23-s4s6s23ox=-s6(s5c1c23+c5(s1s4 + c4c1c23)) - c6(c4s1-s4c1c23) oy=c6(c1c4+s4s1c23)-s6s5s1s23-c5(c1s4-c4s1c23) oz=-s6(s5c23 - c4c5s23- c6s4s23) ax=c5(c1s23- s5(s1s4 + c4c1c23)) ay=c5(s1s23+ s5(c1s4 - c4s1c23)) az=c5(c23 + c4s5s23)px=d6(c5c1s23-s5(s1s4+c4c1c23))-d2s1-d4c1s23+ a2c1c2 - a3c1s2s3 + a3c1c2c3 py=d6(c5s1s23+s5(c1s4-c4s1c23))+d2c1-d4s1c23+ a2c2s1- a3s1s2s3 + a3c2c3s1 pz=d1- a2s2 -d4c23+ d6(c5c23+ c4s5s23) - a3c2s3 - a3c3s2 其中:c23=cos(θ2+θ3),s23=sin(θ2+θ3). 带入:c1=0; s1=1; c2=1; s2=0; c3=0; s3=-1; c4=-1; s4=0; c5=-1; s5=0; c6=-1; s6=0;得到:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-++--=100013001642100201060d a d d a d T与图中实际位置相符,故正解正确。
机器人技术及应用-大作业1
for q1=q1_s:step1:q1_end
for d2=d2_s:step2:d2_end
for q3=q3_s:step3:q3_end
for q4=q4_s:step4:q4_end
% T=p560.fkine([q1*du d2 q3*du q4*du ]);%正向运动学仿真函数
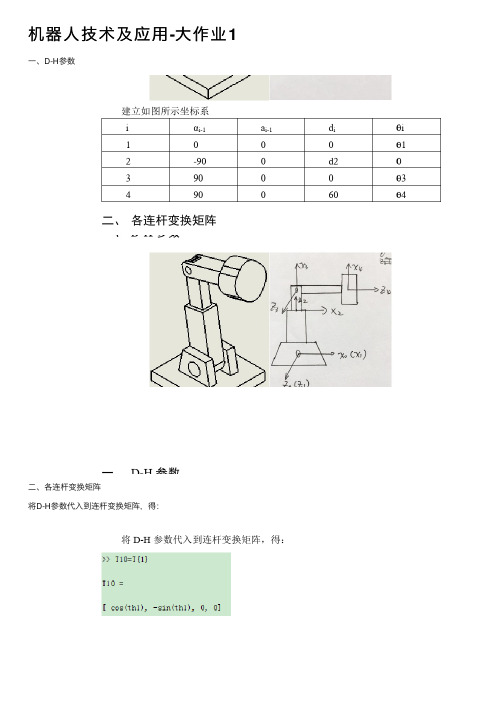
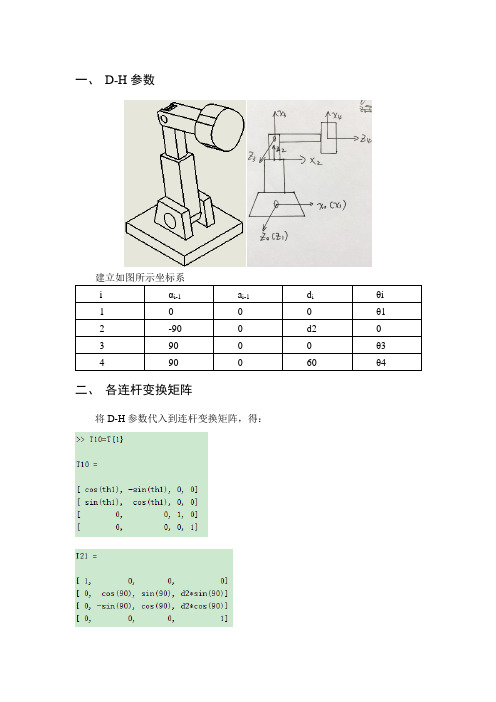
一、D-H参数
建立如图所示坐标系
i
αi-1
ai-1
di
θi
1
0
0
0
θ1
2
-90
0
d2
0
3
90
0
0
θ3
4
90
0
60
θ4
二、各连杆变换矩阵
将D-H参数代入到连杆变换矩阵,得:
三、各连杆至末端连杆的变换矩阵
T43=T43
T42=T32*T43;
T41=T21*T42;
Matlab编程:
clc
clear all
T10=[cos(q1) -sin(q1) 0 0; sin(q1) cos(q1) 0 0; 0 0 1 0;0 0 0 1];
T21=[1 0 0 0; 0 0 1 d2; 0 -1 0 0; 0 0 0 1];
T32=[cos(q3) -sin(q3) 0 0; 0 0 -1 0; sin(q3) cos(q3) 0 0;0 0 0 1];
plot3(T_x,T_y,T_z,'r.','MarkerSize',3);
disp(['绘制工作空间运行时间:',num2str(etime(clock,t1))]);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
山东大学威海分校机器人大作业(论文)设计(论文)题目PUMA560机器人运动学分析姓名:石攀学号:************学院:机电与信息工程学院专业:机械设计制造及其自动化年级:2010级指导教师:陈原2013年06月目录一、简介1.1工程背景及参数 (1)二、PUMA 560正解 (3)2.1 求解方法 (3)2.2 程序实现 (4)2.3 正解原程序 (4)三、PUMA 560逆解 (6)3.1 PUMA 560 逆解 (6)3.2 求解过程 (6)3.3 逆解原程序 (9)3.4 程序验证 (10)四、求解PUMA 560雅可比矩阵 (11)4.1 雅可比矩阵简述 (11)4.2 微分变换法求J(q) (11)4.3 矢量积法求J(q) (12)4.4 求解雅可比矩阵 (13)4.5 求解程序 (14)五、PUMA 560运动仿真 (16)PUMA560机器人运动学分析摘要:随着现代工业化的快速发展,机器人得到了广泛应用,有关机器人的理论也一直是研究机器人的重点内容。
本文首先对机器人PUMA560 运动学基础理论进行了必要的描述,建立了D-H 参数表。
之后根据D-H 参数表对PUMA 560 求正解、逆解以及雅可比矩阵。
关键词:机器人PUMA560 正解逆解雅可比Abstract: With the rapid development of modern industrialization, the robot has been widely applied, the robot's theory also has been the research focus of the robot. This article first on PUMA560 robot kinematics basic theory into the necessary description, established the d-h parameters table. Based on d-h parameters after the table of PUMA 560 positive solutions and inverse solution and the jacobian matrix.Key words:Robot PUMA560 Positive solutions Inverse Solution Jacobi一、简介工程背景工业机器人不仅应用于传统制造业如采矿、冶金、石油、化学、船舶等领域,同时也已开始扩大到核能、航空、航天、医药、生化等高科技领域以及家庭清洁、医疗康复、酒店餐饮等服务业领域中。
如,水下机器人、擦玻璃机器人、高压线作业机器人、服装裁剪机器人、制衣机器人、管道机器人等特种机器人以及扫雷机器人、作战机器人、侦察机器人、哨兵机器人、排雷机器人、布雷机器人等军用机器人都广泛应用于各行各业。
PUMA560机器人整体图PUMA560属于关节式机器人,6个关节都是转动关节,如下图2.1所示。
前三个关节确定手腕参考点位置,后三个关节确定手腕的方位,后三个关节轴线交予一点。
图2.1PUMA560机器人的D-H参数Puma560全为转动关节:Zi坐标轴:沿着i+1关节的运动轴;Xi坐标轴:沿着Zi和Zi-1的公法线,指向离开Zi-1轴的方向;Yi坐标轴:按右手直角坐标系法则制定;连杆长度ai; Zi 和Zi-1两轴心线的公法线长度; 连杆扭角αi: Zi 和Zi-1两轴心线的夹角; 两连杆距离di: Xi 和Xi-1两坐标轴的公法线距离; 两杆夹角θi :Xi 和Xi-1两坐标轴的夹角;连杆 i 变量 i θ-1i α -1i a i d变化范围2( 0)θ︒2d-225°-45° 3 3(-90)θ︒ 0° 2a 0-45°-225° 4 4( 0)θ︒ -90° 3a4d-110°-170° 5 5( 0)θ︒90° 0 0 -100°-100° 66( 0)θ︒-90°-266°-266°二、 PUMA560机器人的正解 2.1 求解方法11110100000010001c s s c T θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 22212220000100001c s d T s c θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥⎣⎦ 332332300000100001c s a s c T θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦55455500001000001c s T s c θθθθ-⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦ 66566600001000001c s T s c θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥⎣⎦各连杆变换矩阵相乘,得PUMA560的机械手变换矩阵:01234511223344556606()()()()()()=T T T T T T T θθθθθθ 式(1)为1θ,2θ,……,6θ的函数。
2.2 程序实现转 角 变 量 分 别 赋 予 90 , 0 , -90 , 0 , 0 , 0 , 即 调 用 MatlabPositive_Solution([90,0,-90,0,0,0])函数可得如下结果: ans =0.0000 1.0000 0.0000 -149.0900 0.0000 -0.0000 1.0000 864.8700 1.0000 0 -0.0000 20.3200 0 0 0 1.0000 则06T 即为正解。
3.3 正解源程序截图在求出正解的同时自动绘出此时的机器人坐标图 图3.1和图3.2为两个不同的视图图3.1图3.2三PUMA560机器人的逆解3.1 PUMA 560 逆解:01234511223344556606n =()()()()()()01=x x x x yy y y z z z z o a p n o a p T T T T T T n o a p T θθθθθθ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦式(2) 若末端执行器的位姿已经给定,即,,,n o a p 为已知,则求关节变量1θ,2θ,……,6θ的值称为运动反解。
3.2.2.取末端执行器的位姿为06T T60 =0 1.0000 0 -149.0900 0 0 1.0000 864.8700 1.0000 0 0 20.3200 0 0 0 1.0000 来求逆解。
3.2 求解过程:①求1θ()()()()()()010123451162233445566T T T T T T T θθθθθθ-= 式(3)11111600000010000101xx x x yy y y zz z z c s n o p a s c n o a p T n o a p ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦式(4) 令上面矩阵方程两端元素(2,4)对应相等,可得:112x y p c p d s +=- 式(5)利用三角代换;cos x p ρφ=;sin y p ρφ= 式(6)式中,ρ=tan2(,)y x a p p φ=。
联合以上两式,得1θ的解:1212112sin()/;cos()atan2,atan2(,)atan2(,y x d d p p d ϕθρϕθϕθρθ-=-=⎪⎡⎪⎢-=⎬⎢⎪⎣⎪⎪=-⎭式(7)式中,正负号对应1θ于两个可能的解。
②求3θ在选定1θ的一个解之后,再令式(4)两端元素(1,4)和(3,4)分别对应相等,即得两方程:113234232232342322x y z c p s p a c d s a c p a s d c a s +=-+⎫⎪⎬-=++⎪⎭式(8)式(5)式(8)的平方和为:3343a c d s k -= 式(9)可得334atan2(,)atan2(,a d k θ=- 正负号对应两种可能的解。
③ 求2θ为求解2θ,在矩阵方程式(2)两端坐乘013T -,即:()()()()01034531236445566,,T T T T T θθθθθθ-= 式(10)123123232312312323233611200101xx x x yy y y zz z z c c s c s a c n o p a c s s s c a s n o a p T s c d n o a p --⎡⎤⎡⎤⎢⎥⎢⎥---⎢⎥⎢⎥=⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦式(11) 由式(11)两边的元素(1,4)和(2,4)分别对应相等可得:1231232323312312323234x y z x y x c s p s c p s p a c a c s p s s p c p a s d +--=⎫⎪⎬---+=⎪⎭式(12)得2θ四种可能的解:2233θθθ=- 式(13)④求4θ因为式(11)左边均为已知令(1,3)(3,3)分别对应相等,则可得:12312323451145x y z x y a c c a s c a s c s a s a c s s +-=-⎫⎪⎬-+=⎪⎭式(14)只要50s ≠,便可求出4θ:541111231232354211123123230atan2(,)0atan2(,)x y x y z x y x y z s a s a c a c c a s c a s s a s a c a c c a s c a s θθ>=-+--+<=-+-当当⑤求5θ将式(2)两端左乘()0141234,,,T θθθθ-得()()()010454123465566,,,T T T T θθθθθθ-= 式(15)根据(1,3)(3,3)分别对应相等,则可得:()()()()()()1234141234142345123123235x y z x y z a c c c s s a s c c c s a s c s a c s a s s a c c ++--=-⎫⎪⎬-+-+-=⎪⎭式(16)可得5θ555atan2(,)s c θ=⑥求6θ将式(2)改写为:()()0105512345666,,,,T T T θθθθθθ-= 式(17)让上式两边的元素(3,1)(1,1)分别对应相等可得:1234141234142346()()()x y z c c s s c n s c s c c n s s s n --++=-123414512351234145123523452356[()][()]()x y z c c s s c c c s s n s c s c c c s s s n s s c c s c n +-+---+=从而得666atan2(,)s c θ=综上来看,PUMA560逆解共八种3.3逆解源程序截图3.4 MATLAB程序验证>>nijienijie(0,1,0,-149.09,0,0,1,864.87,1,0,0,20.32)theta1 theta2 theta3 theta4 theta5 theta690.0000 -2.6918 -84.6272 -180.0000 2.6810 180.000090.0000 -0.0000 -90.0000 -174.9986 0.0000 174.9986 -70.4385 182.6918 -90.0000 97.5292 19.7387 82.0067 -70.4385 180.0000 -84.6272 104.7629 20.2581 74.3103 90.0000 -2.6918 -84.6272 0.0000 -2.6810 -0.0000 90.0000 -0.0000 -90.0000 5.0014 -0.0000 -5.0014 -70.4385 182.6918 -90.0000 -82.4708 -19.7387 -97.9933-70.4385 180.0000 -84.6272 -75.2371 -20.2581 -105.6897四、PUMA560机器人的雅克比矩阵4.1 雅可比矩阵简述机器人的笛卡儿空间的运动速度与关节空间运动速度之间的变换。