锅炉蒸汽温度自动控制系统——模糊控制
模糊控制简介

න
������������ (������)������������ (������) (������, ������)
������������
模糊逻辑与近似推理
➢ 近似推理过程: 前提1(事实):������是������’ 前提2(规则):������������ ������ 是 ������,������ℎ������������ ������ 是 ������ 结论:������是������’ 这里������’和������是论域������中的模糊集合,������’和������是论域������中的模
⋯ ������������ ������2, ������������
⋱
⋮
������������ ������������, ������1 ������������ ������������, ������2 ⋯ ������������ ������������, ������������
例:������ = {子,女},������ = {父,母},模糊关系������“子女与
父母长得相似”,用模糊矩阵表示则为:
父母
������
=
子 女
0.8 0.3
0.3 0.6
模糊控制的数学基础
➢ 模糊关系合成 设������、������、������是论域, ������是������到������的一个模糊关系, ������是������到������
锅炉汽包水位的模糊控制系统的设计

诚信申明本人申明:我所呈交的本科毕业设计(论文)是本人在导师指导下对四年专业知识而进行的研究工作及全面的总结。
尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中创新处不包含其他人已经发表或撰写过的研究成果,也不包含为获得北京化工大学或其它教育机构的学位或证书而已经使用过的材料。
与我一同完成毕业设计(论文)的同学对本课题所做的任何贡献均已在文中做了明确的说明并表示了谢意。
若有不实之处,本人承担一切相关责任。
本人签名:年月日锅炉汽包水位的模糊控制系统设计摘要汽包水位是锅炉运行的重要指标。
保持水位在一定范围内是保证锅炉安全运行的首要条件。
水位的过高、过低都会给锅炉及蒸汽用户的安全操作带来不得的影响。
过高,饱和水蒸气将会带水过多,导致过热器管壁结垢并损坏,进而进入汽轮机的蒸汽带液损坏汽轮机叶片,产生安全事故;反之,水位过低,汽化过快,锅炉供水不足,致使水冷壁烧坏,甚至引起爆炸。
锅炉汽包水位的控制又比较复杂,其中存在的虚假液位、滞后性、不易检测性等等又使传统控制很难达到较为完善的控制要求。
针对锅炉汽包水位存在虚假水位、控制系统复杂、具有滞后性、难以检测等特性,及采用传统PID控制时,效果不佳,如果控制不及时,甚至会产生安全事故的情况。
同时对比模糊控制的发展现状,可发现其适应性好、鲁棒性强、控制精度高等优势,所以本文设想在传统PID控制中引入模糊控制,改善汽包水位控制系统的静态和动态特性,使汽包水位恒定在一定范围之内,杜绝安全隐患,实现锅炉汽包水位的更精确、更有效的智能控制。
关键词:锅炉汽包水位模糊控制 Matlab仿真设计 PIDThe Suzzy Control Design about Boilder Drum Water LevelSystemAbstractThe drum water level is an important index of boiler operation. Keep the water level in certain scope is to ensure the safe operation of the boiler in the workplace. The low water level higher, and will give boiler and steam the safety of users may not bring the influence of the operation. Too high, saturated steam will bring too much water, resulting in superheater tube wall scaling and damage, and then into the steam turbine with liquid damage turbine blade, produce safety accident; Conversely, low water, vaporizing too fast, boiler water supply shortage, the water wall burn out, and even cause an explosion.The boiler drum water level control and more complex, the existing false liquid level, lagging, easily tested, and so on and that traditional control of it is difficult to reach a perfect control requirements.For boiler drum water level has false water level and control system with delay and complex, difficult to testing and other characteristics, and adopts the traditional PID control, the effect not beautiful, if not in time control, even can produce safety accidents. At the same time compared to current situation of the development of the fuzzy control, find the good adaptability, and robust, control precision higher advantage, so this paper in the traditional PID control idea introducing fuzzy control, improve the drum water level control system static and dynamic characteristics of the drum water level constant in certain limits, eliminate hidden dangers, realize the boiler drum water level of more accurate, more effective intelligent control.Key words:Boiler Drum Water Level Fuzzy Control Design Matlab PID目录前言 (1)第1章锅炉相关控制与前景 (2)第1.1节概述 (2)第1.2节锅炉设备的控制任务 (2)第1.3节研究状况 (3)第2章锅炉汽包水位的控制 (5)第2.1节汽包水位的动态特性 (5)第2.2节汽包水位的几种常规控制方法 (7)第3章模糊控制原理 (12)第3.1节模糊控制的形成与提出 (12)第3.2节模糊控制的优缺点 (13)第3.3节模糊控制的基本原理 (14)第4章锅炉汽包水位的模糊控制系统设计与仿真 (23)第4.1节输入输出变量的选择 (23)第4.2节隶属函数的选择 (25)第4.3节模糊规则表的建立 (26)第4.4节合成推理算法 (29)第4.5节模糊控制表 (32)第4.6节控制参数的自整定 (34)第5章模糊PID控制的MATLAB仿真 (35)第5.1节仿真流程图 (35)第5.2节模糊控制器模块的建立 (36)第5.3节仿真模型的建立 (37)第5.4节模糊PID控制与常规PID控制仿真的比较 (39)结论 (43)参考文献 (44)致谢 (45)前言锅炉是工业过程中不可缺少的动力设备为确保安全稳定生产对锅炉的自动控制十分重要其中汽水位是一个非常重要的被控变量由于锅炉的水位调节过程难以建立数学模型具有非线性不稳定性时滞等特点传统的锅炉水位三冲量控制系统大都采用PID控制其控制效果还可以进一步提高而模糊控制不要求知道被控对象的精确数学模型只需要操作人员的经验知识及操作数据鲁棒性强非常适合用于非线性滞后系统的控制但其静态性能不能令人满意限制了它的应用为消除模糊控制的稳态误差采用Fuzzy-PID控制是常用的一种方式,所以本论题具有一定的现实意义。
基于模糊控制的电厂蒸汽锅炉自动控制系统研究

总第 1 5ห้องสมุดไป่ตู้ 1 6 5期 2 0 1 3年 5月
大 众 科 技
P o p u l a r Sc i e n c e& Te c h n o l o g y
VO I . 1 5 No . 5 Ma y 2 0 1 3
基于模糊控制 的电厂蒸汽锅炉 自动控制系统研 究
周继春
废气n 。因 此 在 活 力 发 电厂 运 行 过 程 中 ,如 何对 蒸汽 锅 炉 进
基于模糊控制 的控制系统等等 ,国内的一些相关文献也有介 绍应用此类控制策略在不同的工业生产领域的应用 实力 。比 如: 王 中杰, 郝娟针对锅炉运行过程 中的燃烧过程控制, 采用 ¥ 7 - 2 0 0系列 P L C设计 自动控制 系统及三个子系统,从而得 出 了各个控制方案 。刘立锋 ,陆盛春针对手动操作 的 C F B锅 炉存在 的一系列 问题, 提 出了小型 C F B锅炉的 自动控制方案, 从而实现 了 C F B锅炉在绝大多数时间实现 自动控制 。龚月 明, 华优基 以 7 5 t / h燃气锅炉和 1 5 M W汽轮发 电机组成的燃气 发电为例 ,描述燃气锅炉的主要 自动控制回路及配套汽轮机 控制原理 ,并初步探讨 了炉机平衡 问题 … 。
模糊控制简介

R=(NBe × PBu ) + ( NSe × PSu ) + (0e × 0u ) + ( PSe × NSu ) + ( PBe × NSu )
NBe × PBu = (1, 0.5, 0, 0, 0, 0, 0) × (0, 0, 0, 0, 0, 0.5,1) NSe × PSu = (0, 0.5,1, 0, 0, 0, 0) × (0, 0, 0, 0,1, 0.5, 0) 0e × 0u = (0, 0, 0.5,1, 0.5, 0, 0) × (0, 0, 0.5,1, 0.5, 0, 0) PSe × NSu = (0, 0, 0, 0,1, 0.5, 0) × (0, 0.5,1, 0, 0, 0, 0) PBe × NSu = (0, 0, 0, 0, 0, 0.5,1) × (1, 0.5, 0, 0, 0, 0, 0) 0 0 0 0 0.5 1 0 0 0 0 0 0.5 0.5 0.5 0 0 0.5 0.5 1 0 0 R= 0 0 0.5 1 0.5 0 0 0 0.5 1 0.5 0.5 0 0 0 0 0 0.5 0.5 0.5 0 1 0.5 0 0 0 0 0
学习功能
数据存储 单元
y
∗ k
e
r + —
∆
∆
k
e
e
k
c
2
e
k
Байду номын сангаас
r
模糊 控制 规则
k
∆
u
u
u
u
k −1
k
+ +
被 控 对 象
y
k
六.思考
矛盾对立统一规律: 矛盾对立统一规律:两面性 • 优点:模糊逻辑本身提供了由专家构造语 优点: 言信息并将其转化为控制策略的一种系统 的推理方法, 的推理方法,因而能够解决许多复杂而无 法建立精确数学模型系统的控制问题, 法建立精确数学模型系统的控制问题,所 以它是处理推理系统和控制系统中不精确 和不确定性的一种有效方法。从广义上讲, 和不确定性的一种有效方法。从广义上讲, 模糊控制是适于模糊推理, 模糊控制是适于模糊推理,模仿人的思维 方式, 方式,对难以建立精确数学模型的对象实 施的一种控制策略。 施的一种控制策略。它是模糊数学同控制 理论相结合的产物, 理论相结合的产物,同时也是智能控制的 重要组成部分。 重要组成部分。
锅炉主蒸汽温度模糊PID控制系统的研究
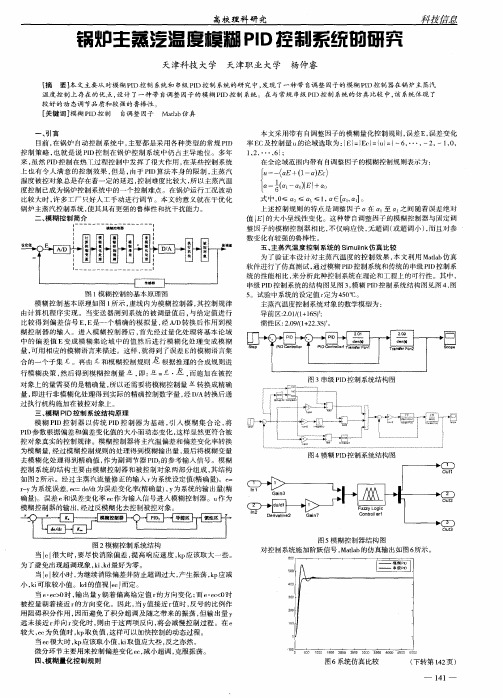
图1 模糊控制 的基本原理 图 模 糊控制基本 原理如 图 1 示 , 所 虚线 内为模糊 控制器 , 其控制 规律 由计 算机程 序实现 。当变送器 测到系统 的被 调量值后 , 与给定值进 行 比较得 到偏差信 号 E E , 是一 个精确 的模拟量 , A D 经 / 转换 后作用 到模 糊 控制器 的输入 。进入模糊控 制器后 , 先经过量化 处理将基本论 域 首 中的 偏差值 E变 成模糊 集论 域中 的值然后 进行 模糊化 处理 变成模 糊 量, 可用相应 的模糊 语言来描述 。这 样 , 就得到 了误差 E的模糊语 言集 合 的一个子集 旦 。再 由 £和模糊控制规 则 墨 根据推理 的合 成规 则进 行模糊决 策 , 然后 得到模糊 控制量 旦 , : =旦 ・ , 即 旦 笪 而施加在 被控 对象上的量需要 的是精确量 , 以还需要将模糊控制量 旦 转换 成精确 所 量, 即进行非模糊 化处理得到实 际的精确控制数字量 , DA转换 后通 经 / 过执行 机构施加在被控对象上 。 三 、 糊 PI 制 系 统 结构 原 理 模 D控 模 糊 PD控制 器 以传统 PD控制 器 为基础 , I I 引入模 糊 集合 论 , 将 P D参数根据偏差 和偏 差变化值 的大小而动态变化 , I 这样显然更符合被 控对象真实 的控制 规律 。模糊 控制器将主汽温偏差 和偏差 变化率转换 为模 糊量, 经过模糊控制规则 的处理得到模糊输 出量 , 最后将模糊 变量 去模糊化 处理得 到精确值 , 作为副调节 器 PD 的参考 输入信号 。模 糊 I 控制系统 的结构 主要由模糊控 制器和被控 制对象两部分 组成 , 结构 其 如图 2 所示 。经过主蒸汽流量修 正的输 人 r 为系统设定值( 确量) = 精 。e rY _ 为系统误差, C d/ 为误差变化率( e- e t d 精确量) Y , 为系统的输 出量 ( 精 确量) 。误差 e 和误 差变化率 e 作 为输入信号进入模 糊控制器 。u c 作为 模糊 控制器的输 出, 经过反模糊化去控制被控对象 。
本科大作业模糊PID温控

模糊PID温度控制系统摘要温度控制在工业控制中一直是富有新意的课题,对十不同的控制对象,有着不同的控制方式和模式。
温度系统惯性大、滞后现象严重,难以建立精确的数学模型,给控制过程带来很大难题。
本文以电锅炉为研究对象,研究一种最佳的控制方案,以达到系统稳定、调节时间短目‘超调量小的性能指标。
本文对电锅炉可采用的控制方案进行了深入研究,首选的研究方案是PID控制。
温度PID控制器的原理,是将温度偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制,PID控制的重点是参数的调节。
第二个研究方案是模糊控制,研究了模糊控制的机理,确定了电锅炉模糊控制器的结构。
通过对电锅炉温升特点的分析,建立了模糊控制规则表。
借助matlab中的Simulink和 Fuzzy工具箱,对电锅炉PID控制系统和模糊控制系统进行仿真分析。
结果表明当采用PID算法时,系统的超调量与调节时间,不能同时满足技术要求。
当采用模糊控制时,超调量与调节时间虽然同时满足技术要求,但系统出现了稳定误差。
因此本文将模糊控制的智能性与PID控制的通用性、可靠性相互结合,设计了一种参数自整定模糊PID控制器,采用模糊推理的方法实现PID参数Kp 、Ki和Kd的在线整定。
经仿真研究,参数自整定模糊PID控制效果达到了电锅炉温度控制系统的性能指标,是一种较为理想的智能性控制方案。
关键词温度控制;模糊PID控制;参数整定;仿真Abstract第一章绪论1.1 选题背景及其意义在工业生产过程中,控制对象各种各样,温度是生产过程和科学实验中普遍而且重要的物理参数之一。
在生产过程中,为了高效地进行生产,必须对它的主要参数,如温度、压力、流量等进行有效的控制。
温度控制在生产过程中占有相当大的比例,其关键在于测温和控温两方面。
温度测量是温度控制的基础,技术已经比较成熟。
由于控制对象越来越复杂,在温度控制方面,还存在着许多问题。
如何更好地提高控制性能,满足不同系统的控制要求,是目前科学研究领域的一个重要课题。
锅炉蒸汽温度自动控制系统——模糊控制

锅炉蒸汽温度自动控制系统摘要:电厂实现热力过程自动化,能使机组安全、可靠、经济地运行。
锅炉是火力发电厂最重要的生产设备,过热蒸汽温度是锅炉运行质量的重要指标之一,过热蒸汽温度控制是锅炉控制系统中的重要环节。
在实现过程控制中,由于电站锅炉系统的被控对象具有大延迟,大滞后、非线性、时变、多变量耦合的复杂特性,无法建立准确的数学模型,对这类系统采用常规PID控制难以获得令人满意的控制效果。
在这种情况下,先进的现代控制理论和控制方法已经越来越多地应用在锅炉汽温控制系统。
本文以电厂锅炉汽温系统为研究对象,对其进行了计算机控制系统的改造。
考虑到锅炉汽温系统的被控对象特点,本文分别采用了常规PID控制器和模糊-PID控制器,对两种控制系统对比研究,同时进一步分析了一般模糊-PID控制器的控制特点,在此基础之上给出了一种改进算法,通过在线调整参数,实现模糊-自调整比例常数PID控制。
在此算法中,比例常数随着偏差大小而变化,有效地解决了在小偏差范围内,一般的模糊-PID控制器无法实现的静态无偏差的问题,提高了蒸汽温度控制系统的控制精度。
关键词:锅炉蒸汽温度模糊控制随着我国经济的高速发展,对重要能源“电”的要求快速增长,大容量发电机组的投入运行以及超高压远距离和赢流输电的混和电网的建设,以三峡电网为中心的全国性电力系统的形成,电力系统的不断扩大,对其自动控制技术水平的要求也越来越高。
同时,地方性的自备热电厂亦有长足发展,随着新建及改造工程的进行,其生产过程自动控制与时俱进,小容量机组“麻雀虽小,五脏俱全”,自备热电厂其自身特点:自供电、与主电网的关系疏及相互影响小,供热及采暖季节性等,可以提供更多的应用、尝试新技术、新产品的机会和可能性。
这样做的重要目标是提高和保证电力,热力及牛产过程的安全可靠、经济高效。
为了适应发展并实现上述目标,必须采取最新的技术和控制手段对电力系统的各种运铲状态和设备进行有效的自动控制。
火力发电厂在我国电力工业中占有主要地位,是我国重点能源工业之一。
锅炉自动控制系统的设计与调试

锅炉自动控制系统的设计与调试锅炉自动控制系统是现代工业中常见的关键设备之一,它能够确保锅炉能够高效、安全地运行。
设计和调试这样一个复杂的系统需要综合考虑多个因素,包括控制策略、传感器选择、控制器配置等等。
本文将深入探讨锅炉自动控制系统的设计与调试过程。
首先,设计一个合理的控制策略是锅炉自动控制系统的关键。
常见的控制策略包括比例控制、比例积分控制、模糊控制和模型预测控制等。
在选择控制策略时,需要考虑锅炉的特性、工艺要求以及可用的控制器等因素。
比例控制是最简单的控制策略,它根据当前错误信号的大小来控制执行机构输出。
比例积分控制在比例控制的基础上增加了积分部分,用于消除静态偏差。
模糊控制则通过模糊规则和模糊集合来实现控制,它能够应对非线性系统。
模型预测控制基于数学模型预测未来的系统行为,并制定最优的控制策略。
根据具体的需求和实际情况选择合适的控制策略非常重要。
其次,选择合适的传感器对于控制系统的稳定性和精确度来说也至关重要。
常用的锅炉传感器包括压力传感器、温度传感器、流量传感器等。
压力传感器用于监测锅炉内部压力的变化,温度传感器则用于测量锅炉内部温度的变化。
流量传感器可用于测量锅炉进出口的流量,以便精确控制水的供给。
传感器的选择需要考虑其精确度、响应速度和适应环境等因素。
同时,还需要考虑传感器与控制器之间的数据传输方式,如4-20mA信号或数字信号等,以确保数据准确传递。
控制器的配置也是锅炉自动控制系统设计中不可忽视的一环。
现代控制器提供了更多的功能和选项,如PID参数调整、通信接口、报警功能等。
PID控制器是最常见的控制器类型,通过调整比例、积分和微分参数来实现控制。
在配置PID控制器时,需要首先根据实际情况调整比例、积分和微分参数,以达到理想的控制效果。
另外,现代控制器通常具有通信接口,可以与上位机或网络连接,以实现远程监控和数据采集。
此外,控制器还应具备相应的报警功能,在发生异常情况时及时报警,保障安全运行。
《2024年基于模糊PID控制的电锅炉温度控制系统的研究》范文

《基于模糊PID控制的电锅炉温度控制系统的研究》篇一一、引言随着科技的发展,电锅炉作为现代供暖设备的重要组成部分,其控制系统的性能直接影响着供暖的效率和舒适度。
温度控制系统作为电锅炉的核心部分,其稳定性和准确性是保证电锅炉正常工作的关键。
传统的PID控制算法在电锅炉温度控制中已得到广泛应用,然而在某些非线性、时变性的复杂环境中,传统PID控制算法的控制效果并不理想。
因此,本研究将模糊控制理论与PID控制算法相结合,提出了一种基于模糊PID控制的电锅炉温度控制系统,以提高电锅炉的温控性能。
二、系统构成与工作原理本研究所提出的电锅炉温度控制系统主要由模糊PID控制器、电锅炉本体、温度传感器等部分组成。
其中,模糊PID控制器是本系统的核心部分,负责接收温度传感器的反馈信号,并根据预设的温度值对电锅炉进行控制。
系统的工作原理如下:首先,温度传感器实时检测电锅炉的水温,并将检测结果反馈给模糊PID控制器。
模糊PID控制器根据预设的温度值与实际温度值的差异,计算出控制量,并通过调节电锅炉的功率,实现对水温的精确控制。
三、模糊PID控制算法研究模糊PID控制算法是将模糊控制和PID控制相结合的一种控制算法。
该算法通过引入模糊控制理论,对传统PID控制算法进行优化,提高了系统的适应性和鲁棒性。
在模糊PID控制算法中,首先需要建立模糊规则库,包括输入变量的模糊化、输出变量的去模糊化以及模糊规则的制定等。
然后,根据实际温度值与预设温度值的差异,以及温差的变化率等参数,通过模糊推理机制计算出相应的控制量。
最后,将计算出的控制量作用于电锅炉,实现对水温的精确控制。
四、实验研究与结果分析为了验证基于模糊PID控制的电锅炉温度控制系统的性能,本研究进行了大量的实验研究。
实验结果表明,与传统的PID控制算法相比,基于模糊PID控制的电锅炉温度控制系统具有更好的稳定性和准确性。
在非线性、时变性的复杂环境中,该系统能够快速响应温度变化,实现对水温的精确控制。
模糊控制在锅炉给水控制系统中的应用
Ci w e noe o c ha e c o—snP t nN T h li a — us —— d r g— d
模 糊控制在锅炉给水控制 系统 中的应用
朱洪军 1 , 周 佐 2 路虹波 3
(、 1中国石油大学( 华东) 信息控制学院, 山东 东营 276 2齐鲁石化热电厂, 50 1 、 ) 026
摘 要: 本文提 出 了一 种基 于模 糊控 制原 理 的 实时控 制 系统 。
关 键词 : 糊控 制 ; 炉给 水 ;I 参数 整 定和优 化 模 锅 PD;
1引言
F Z Y控 制器简要介绍 : UZ 1 uz 控制的基本原理 .F z 1 y 模糊 控制是人工智能控制 的典型代表 。它 模仿人的思维逻辑 , 被控对象 的运 行规律 ( 对 往 往没有确切 的数学 模型 ) 行总结 、 象 、 进 抽 推理 、 量化 , 实施有效 的控制 。 糊控制的基础是模糊 模 数学 , 用模糊数学 的推理 理论 , 利 离线建 立隶属 函数 数据库 , 将各种 复杂的过 程对象简单化 。 该 过程 需要对被控对象充 分的 了解 ,是直 接的操 作者, 具有 丰富 的经验 , 能总 结规律 , 才 建立 隶 属 函数数据库 。 当在线运行时 , 利用计算机的高 速、 大容量性 能 , 过推理 、 通 量化 运算得 到具 体 的控制量 。 模糊 控制是 一种非线性控制器 , 适合 于时变 、 非线性 、 强耦合系统 。 1 U Z ( . F Z Y 模糊 ) 2 控制器 的组成 F Z Y控制器主要 由四部分组成 : UZ
中国新技术新产品
一2 l一
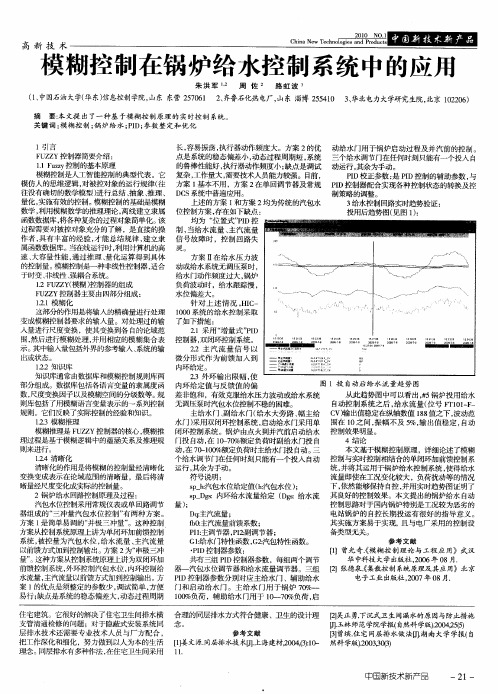
・
从此 趋势 图中可 以看 出 ,5 炉投用 给水 #锅 自动控制 系统 之后 , 给水 流量 ( 号 F I 1F 位 T O- — c 输 出值稳定在纵 轴数 值 18 v) 8 值之下 , 动范 波 围在 1 之 间 , 幅不及 5 输 出值稳 定 , O 振 %, 自动 控制效果 明显 。 4结论 本文基于模糊 控制原理 ,详细论述 了模 糊 控制与实 时控制相结合 的单闭环加前馈控制 系 统, 并将其运用 于锅炉给水控 制系统 , 使得 给水 流量 即使在 工况变化较大 , 负荷 扰动等 的情 况 下, 依然能够保 持 自控 , 并用实时趋 势图证 明了 其 良好的控 制效 果 。本文提 出的锅炉给水 自动 控制思路对 于国内锅炉特别是 工况较为恶劣 的 电站锅 炉 的 自控长期 投运有 很好 的指导 意义 。 其实施方 案易于实 现, 与 电厂采用 的控制设 且
模糊控制理论
模糊控制理论的发展与综述摘要:主要总结了模糊控制理论的形成,以及现在的发展,模糊控制理论的研究现状,模糊控制系统的应用的发展前景。
关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展1 引言自从美国加利福尼亚大学控制论专家L.A.Zadeh教授在1965年提出的《Fuzzy Set》开创了模糊数学的历,吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会科学的各个领域,尤其是第五代计算机的研制和知识工程开发等领域占有特殊重要的地。
把模糊逻辑应用于控制领域则始于1973。
1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机的控制。
此后20年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种体系理论方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
从广义上讲,模糊控制是基于模糊推理,模仿人的思维方式,对难以建立精确数学模型的对象实施的一种控制策略。
它是模糊数学同控制理论相结合的产物,同时也是只能控制的重要组成部分。
模糊控制的突出特点在于:1)控制系统的设计不要求知道被控对象的精确数学模型,只需要提供现场操作人员的经验知识及操作数据。
2)控制系统的鲁棒性强,适用于解决常规控制难以解决的非线性、时变及大滞后等问题。
3)以语言变量代替常规的数学变量,易于形成专家的“知识”。
4)控制系统采用“不精确推理”。
推理过程模仿人的思维过程。
由于介入了人的经验,因而能够处理复杂甚至“病态”系统。
传统的控制理论(包括经典控制理论和现代控制理论)是利用受控对象的数学模型(即传递函数模型或状态空间模型)对系统进行定量分析,而后设计控制策略。
这种方法由于其本质的不溶性,当系统变得复杂时,难以对其工作特性进行精确描述。
而且,这样的数学模型结构也不利于表达和处理有关受控对象的一些不确定信息,更不利于人的经验、知识、技巧和直觉推理,所以难以对复杂系统进行有效地控制。
模糊控制在工业锅炉中的应用

模糊控制在工业锅炉中的应用摘要:采用国产永宏PLC为开发平台,设计模糊自整定PID控制器应用于工业锅炉控制系统克服了锅炉控制系统的大惯性、非线性等特点,并结合PID控制稳态精度高的特点,使控制系统有良好的控制效果。
在研究模糊控制与传统PID控制相结合的基础上,以工业锅炉为对象,设计了一套完善、实用的自动控制系统。
关键词:模糊控制PID 自整定锅炉PLC工业锅炉是能源转换和能源消耗的重要设备。
由于我国工业锅炉生产操作水平的落后,造成大量的热能丢失,经济效益很低。
随着科学技术的发展,计算机的逐步普及,工业锅炉开始采用微型计算机控制。
实践证明,工业锅炉实现微型计算机控制,是锅炉安全生产,提高热效率,节约能源的一大创举,也为锅炉生产开辟了广阔的前景。
1锅炉控制系统控制系统方案设计将锅炉汽包水位控制系统作为主要研究内容,汽包水位是锅炉运行中的一个重要参数,它体现出锅炉产生的蒸汽量和给水量之间的动态平衡关系,是锅炉安全运行的重要条件。
汽包水位高会使过热器的受热面结垢而被烧坏;而汽包水位过低则会破坏汽水循环,造成水冷壁管供水不足而被烧毁,甚至引起锅炉爆炸。
锅炉水位自动控制的任务就是控制给水流量,使其适应蒸发量的变化,维持汽包水位在允许的范围内。
将模糊控制算法引入该系统,利用模糊控制易于实现对复杂对象控制的特点,将有经验的操作人员和专家的控制经验应用于控制过程,根据人工控制规则组织控制决策表,然后由该表决定PID参数的输出值,与传统的PID控制相结合,根据锅炉汽包水位运行过程中出现的不同状态和扰动,在线实时的对PID参数整定,使系统运行中保持合适的瞬态参数,易于维持汽包水位在设定值。
(1)锅炉汽包水位的三冲量控制系统。
针对锅炉汽包水位控制系统特点,以锅炉水位作为主控信号,将蒸汽流量作为前馈信号,把给水流量作为反馈信号,组成汽包水位的三冲量控制系统。
当蒸汽负荷突然发生变化,蒸汽流量信号使给水调节阀一开始就向正确方向移动,即蒸汽流量增加,给水调节阀开大,抵消了由于“虚假水位”引起的反向动作,因而减小了水位和给水流量的波动幅度。
热工术语缩写的英文全称

热工术语缩写的英文全称4 火力发电厂自动化常用术语4.1 自动化水平automatic level是指对一个电厂生产过程实现自动控制所达到的程度。
其中包括参数检测、数据处理、自动控制、顺序控制、报警和联锁保护及其系统设计的完善程度,最终体现在值班员的数量和所能完成的功能上。
火力发电厂的自动化水平是主辅机制造质量及可控性;仪表及控制设备质量;自动化系统设计的完善程度;施工安装质量;电厂运行维护水平及人员素质的综合体现。
4.2 热工自动化设计design ofthermal power plant automation根据所设计对象的条件和要求,配置一套具有对参数检测(monitor)、报警(alarm)、控制(control) (模拟量控制、顺序控制或开一关控制)和联锁保护(protection)功能在内的自动化系统。
即对锅炉、汽轮发电机组及其热力系统、燃烧及煤粉制备系统,除灰、除渣、脱硫、供水、补给水处理、燃油供油系统和环境保护所需的仪表和控制设备作统一的系统设计和安装布置设计。
4.2.1 控制方式control mode指值班员监视和控制机组或其他热力设备的运行所采取的形式,主要内容是决定控制盘(台)的位置和所能完成的监控任务。
一般分为就地控制和集中控制两类。
4.2.2 就地控制local control控制盘(台)布置在主辅设备(如锅炉、汽轮机)或辅助系统(如除氧给水系统、热力网系统)附近,或置于辅助车间(如补给水处理车间、供油泵房)内,值班员通过控制盘上设备,分别对被控对象的运行进行就地监视和控制。
4.2.3 集中控制centralized control将在生产上有紧密联系的设备和相关系统的控制盘(台)集中布置在控制室内,值班员对配套运行的机组进行整体的监视和控制。
4.2.4 机炉集中控制boiler—turbine centralized control将锅炉、汽轮机的控制盘(台)集中布置在控制室内。
电锅炉温度控制系统的模糊控制研究
¨
◆ 文 /赵 光 伟
【 要】 摘 本 文设 计 了一 种基 于模 糊 PD 控 制 的 电 锅 炉温 度 控 制 系统 ,其 性 能 明显 优 于 传 统 的 PD 温 度 控 I I
制 系 统 。不 但 克 服 的 困 难 。 且 又 能 得 到 良好 的 动 态 性 能 和 稳 而 态精 度 , 一种 比较优 越 的控 制 策 略 , 有很 好 的 应 用前 景 。 是 具
全 自动 化 的程 序控 制 又 使得 安 全 检修 方便 。
由 于 电 锅 炉 的 温 度 控 制 系 统 存 在 较 大 的 惯 性 、 后 . 以 建 立 滞 难 精 确 的 数 学 模 型 。 所 以 应 用 传 统 的 常 规 PD 控 制 很 难 实 现 预 期 的 控 I 制 效 果 . 设 计 采 用 模 糊 控 制 策 略 很 好 的 解 决 了 这 一 缺 点 。 模 糊 控 本 制 是 近 年 来 发 展 的 一 项 新 技 术 . 以 模 糊 集 合 论 、 糊 语 言 变 量 及 它 模
本 设 计 采 用 PD 与 模 糊 控 制 相 结 合 的 方 式 。 即 混 合 模 糊 PD 控 I I
自动 化 程 程 度 高 、 装 检 修 方 便 等 特 点 … , 理 想 节 能 环 保 型 的 供 暖 制 。 由 于 模 糊 控 制 器 为 P 型 控 制 器 ,它 只 具 有 模 糊 化 比 例 和 微 分 安 是 D
u f u= f k ∑e t =u+ i u+ i () 其 中 et是 连 续 变 量 , 以 u () 所 i= Ki et也 是 连 续 变 量 。 因 此 混 ∑ ()
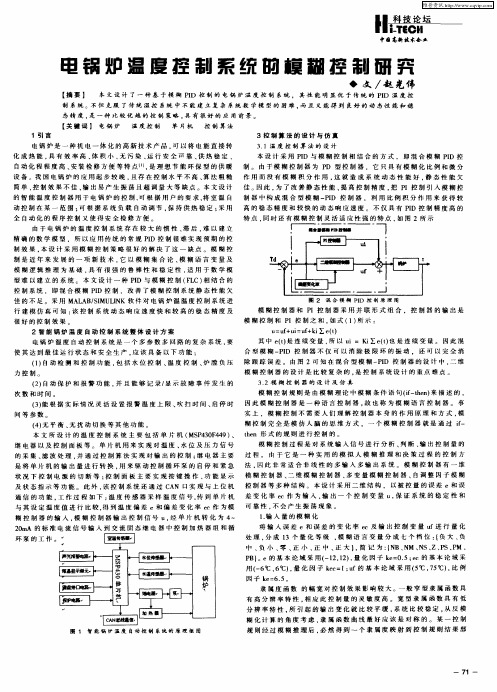
电 锅炉 温 度 自动控 制 系统 是 一个 多 参数 多 回 路 的复 杂 系统 , 要 使 其 达到 最 佳 运行 状 态和 安 全 生产 . 该 具 备 以下 功 能 : 应 力控 制 。
热水锅炉供暖系统温度的模糊自整定控制

P M选用对 称三角形 , 图 3所示 : 如
P s
P/sN P/ sN Z/0 N N /sN N/sZ NI P N / P sN/ B sN/M 0Z /S sP/ s sP/0 ^P s M P s /
P Z / 0 N Z / o N N / sN N / N N P / 0 M P / s B P / S M 0 Z / M o Z / S sP / s M P s M z N / B P N / B P P 丑 Z / o P N / o Z N /s Z N / Z ^ P / 0 B P / B N / B 邝 0 Z / S sZ / O sP / O M P O N I B Z N / B P BP / /
t e rc n r l e u t e c mp r d Re u t T e s se d n mi p r r n e i i r v d atr t e s s m sn u z e - n n h i o t s l a o ae . or sr sl s h y tm y a c e o ma c s mp o e f h y t u ig f zy s l t i g f e e f u
cnrl lo tm,nm l,te oe ho dcessad atjm ig cpb i n acs o cuin F z e - nn I o t grh oa i ae y h vr ot erae n n - m n aait eh ne.C nls uz slt ig PD s ia ly o y fu
摘
要 :目的: 针对热水锅炉供暖系统 中 , 温度的测量与反馈存在严重的滞 后问题和锅炉控 制系统 的大惯 性 、 非线 性等特点 , 出了一 提 种控制算法 , 使得系统性能得 到改善 。方法 : 采用模糊 自整定 PD控制 算法和 PD控 制算 法对 锅炉在 MA I I I T ̄B下 的仿 真模 型
模糊控制在锅炉过热系统中的应用

降负荷 或启停 时 , 蒸汽流量 的变化与压 力 的变 化
是耦合 的, 即流 量增 大 , 力 上升 ; 量 减少 , 压 流 压
维普资讯
第1 6卷
第 2期
北 京石 油 化工 学 院学报
J un l f e gI si t f o r a o in n t ueo B j i t
Pe r - he ia c no og t o c m c lTe h l y
Vo .1 NO. 1 6 2
计 的 固定 参 数 P D 串 级 控 制 难 以适 应 系 统 大 I
范围 的特性 时变 , 对运 行 工况 的适 应性 很 差 , 很 难 取得 满 意 的控 制效 果 。 笔 者提 出 了模糊 多模 型 控制 方法 。对 若 干
C 和 Cz 别 为 环 节 中工 质 的平 均 定压 p 分 比热 和环节 出 口工质 的定 压 比热 ; 为工质流过 整个受 热管 的平 均时间 ; a 。称为动态 参数 ; 为金属 蓄热时 间常数 ; V和 分别 为环节容 积和环 节 内工质 的平
对 若 干 典 型 工 况 点 建 立 固定 模 型 , 设 计 相 应 的 局 域 控 制 器 , 而 用 T— s模 糊 模 型 合 成 出 协 调 控 制 系 并 进 统 的 全 局 控 制 器 , 决 了 多 模 型 切 换 过 程 中存 在 的 扰 动 问 题 。仿 真 结 果 验 证 了 该 方 法 的 有 效 性 。 解
G㈦
一
一
KD e p(  ̄ S T x - ' 一 o
工业锅炉汽包水位模糊自适应PID控制系统

不及 时 , 十秒 之 内就 可 能达 到 危 险水 位 。所 以 数 锅炉 水位控 制显 得非 常重要 …。 目前 常用 的汽包水 位控 制 系统采用 三 冲量 控
制方 式 , 是在 传统 的单 回路 PD控制 的基 础上 , 它 I
再引 入前 馈控 制 环 节 , 构成 前 馈 . 馈 控 制 系 统 。 反 然而 在实 际运行 中 , 于 负荷 比较稳定 、 对 煤质 比较 固定 、 燃烧 比较 平稳 的锅 炉 , 汽包 水位 的 自动控制 系统 一般 可以 投 入 自动 ; 如 果 蒸汽 用 量 突 然增 而
( eer stt o uo a o , o t at nvr t,N i 10 6 C i ) R s c I tu f t t n Su es U i sy n 2 09 , hn ahnie A m i h ei g a
Ab t a t sr c :Bolrd u i r m wae e e o to sse eo g t i or n hema c nr ls se o oslfrd p we e tr lv lc nrl y tms b ln o mp t tt r l o to y tms f fsi i e a o r
维普资讯
发 电 设 备 (0 6N . ) 2 0 o4
I业锅炉 汽包水位挟期 自适应 PD控釉系统 /
工 业 锅 炉汽 包水 位 模 糊 自适应 P D控 制 系统 I
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
锅炉蒸汽温度自动控制系统摘要:电厂实现热力过程自动化,能使机组安全、可靠、经济地运行。
锅炉是火力发电厂最重要的生产设备,过热蒸汽温度是锅炉运行质量的重要指标之一,过热蒸汽温度控制是锅炉控制系统中的重要环节。
在实现过程控制中,由于电站锅炉系统的被控对象具有大延迟,大滞后、非线性、时变、多变量耦合的复杂特性,无法建立准确的数学模型,对这类系统采用常规PID控制难以获得令人满意的控制效果。
在这种情况下,先进的现代控制理论和控制方法已经越来越多地应用在锅炉汽温控制系统。
本文以电厂锅炉汽温系统为研究对象,对其进行了计算机控制系统的改造。
考虑到锅炉汽温系统的被控对象特点,本文分别采用了常规PID控制器和模糊-PID 控制器,对两种控制系统对比研究,同时进一步分析了一般模糊-PID控制器的控制特点,在此基础之上给出了一种改进算法,通过在线调整参数,实现模糊-自调整比例常数PID控制。
在此算法中,比例常数随着偏差大小而变化,有效地解决了在小偏差范围内,一般的模糊-PID控制器无法实现的静态无偏差的问题,提高了蒸汽温度控制系统的控制精度。
关键词:锅炉蒸汽温度模糊控制随着我国经济的高速发展,对重要能源“电”的要求快速增长,大容量发电机组的投入运行以及超高压远距离和赢流输电的混和电网的建设,以三峡电网为中心的全国性电力系统的形成,电力系统的不断扩大,对其自动控制技术水平的要求也越来越高。
同时,地方性的自备热电厂亦有长足发展,随着新建及改造工程的进行,其生产过程自动控制与时俱进,小容量机组“麻雀虽小,五脏俱全”,自备热电厂其自身特点:自供电、与主电网的关系疏及相互影响小,供热及采暖季节性等,可以提供更多的应用、尝试新技术、新产品的机会和可能性。
这样做的重要目标是提高和保证电力,热力及牛产过程的安全可靠、经济高效。
为了适应发展并实现上述目标,必须采取最新的技术和控制手段对电力系统的各种运铲状态和设备进行有效的自动控制。
火力发电厂在我国电力工业中占有主要地位,是我国重点能源工业之一。
其单元发电机组由锅炉、汽轮发电机和辅助设备组成的庞大的设备群。
由于其工艺流程复杂,设备众多,管道纵横交错,大型机组多至上千个参数需要监视、操作或控制,而且电能生产还要求有高度的安全可靠性和经济性,因此,单元机组自动化水平受到特别的重视。
锅炉蒸汽温度自动控制系统的分析:过热蒸汽温度自动控制是维持过热器出口蒸汽温度在允许范围内,并且保护过热器,使管壁温度不超过允许的工作温度。
过热蒸汽温度是锅炉运行质量的重要指标之一,过热蒸汽温度过高或过低都会显著地影响电厂的安全性和经济性。
目前,汽包锅炉的过热器侧调温都是以喷水减温方式为主的。
它的原理是将洁净的给水直接喷进蒸汽,水吸收蒸汽的汽化潜热,从而改变过热蒸汽温度。
汽温的变化通过减温器喷水量的调节加以控制。
影响过热器出口蒸汽温度变化的原因很多,如蒸汽流量变化、燃烧工况变化、锅炉给水温度变化、进入过热器的蒸汽温度变化、流经过热器的烟汽温度和流速变化、锅炉受热面结垢等。
但归纳起来,主要有三个方面:蒸汽流量(负荷)扰动下过热汽温对象的动态特性:当锅炉负荷扰动时,蒸汽流量的变化使沿整个过热器管路长度上各点的蒸汽流速几乎同时改变,从而改变过热器的对流放热系数,使过热器出口汽温的阶跃响应当锅炉的负荷增加时,对流式过热器和辐射式过热器的出口汽温随负荷变化的方向是相反的。
负荷增加时,通过对流式过热器的烟汽温度和流速都增加,从而使对流式过热器的出口汽温升高。
但是,由于负荷增加时,炉膛温度升高不多,而炉膛烟温升高所增加的辐射热量小于蒸汽负荷增大所需要的吸热量,因而当负荷增加时,辐射式过热器出口汽温是下降的。
现代大型锅炉的过热器,对流式过热器的受热面积大于辐射式过热器的受热面积,因此总的汽温将随负荷增加而升高。
烟气热量扰动下过热汽温的动态特性:烟气热量Qy阶跃变化时过热汽温的反应曲线,其特点是:有迟延、有惯性、有自平衡能力。
烟气热量扰动(烟气温度和流速产生变化)时,由于烟气流速和温度的变化也是沿整个过热器同时改变的,因而沿过热器整个长度使烟负荷扰动下的动态特性气传递热量也同时变化,所以汽温反应较快,其时间常数T和迟延t均比其他扰c动小。
现场当中是通过改变烟气温度(例如改变喷燃器角度或改变喷燃器投入的个数)或改变烟气流量来求取汽温响应曲线的。
减温水量扰动下的过热汽温动态特性:当减温水流量扰动时,改变了高一温过热器的入口汽温,从而影响了过热器出口汽温,其阶跃响应曲线如图2.3所示。
从图中可看出,其特点也是有迟延、有惯性、有自平衡能力的。
但是由于现代大型锅炉的过热器管路很长,因而当减温水流量扰动时,汽温反应较慢。
对于一般高、中压锅炉,当减温水流量扰动时,汽温的迟延时间τ≈30~60s,时间常数T≈100s,而当烟气侧扰动时τ≈10~20s,cT<100s。
c烟气热量扰动下的动态特性可见,当负荷扰动或烟气热量扰动时,汽温的反应较快;而减温水量扰动时,汽温的反应较慢。
因而从过热汽温控制对象动态特性的角度考虑,改变烟气侧参数(改变烟温或烟汽流量)的控制手段是比理想的(因为负荷信号由用户决定,不能作为控制量),但具体实现较困难,所以一般很少被采用。
喷水减温对过热器的安全运行比较有利,所以尽管对象的特性不太理想,但还是目前广泛被采用的过热蒸汽温度控制方法。
采用喷水减温时,由于对象控制通道有较大的迟延和惯性以及运行中要求有较小的汽温控制偏差,所以采用单回路控制系统往往不能获得较好的控制品质。
针对过热汽温控制对象控制通道惯性迟延大、被调量信号反馈慢的特点,应该从对象的控制通道中找出一个比被调量反应快的中间点信号作为调节器的补充反馈信号,以改善对象控制通道的动态特性,提高控制系统的质量。
控制系统的分析:加入导前汽温的微分信号可以改善控制对象的动态特性对于如图所示的控制系统,当去掉导前汽温的微分信号时,系统就成为单回路控制系统,参考如图双回路系统的等效方框图,控制对象[W 0(S)=W 01(S)W 02(S)]的迟延、惯性较大。
当系统加入导前汽温微分信号后,调节器将同时接受两个输入信号,系统也成了双回路结构。
但对这个双回路系统作适当的等效变换后,发现仍可把它当作一个单回路系统来处理,如图所示。
只是由于微分信号的引入改变了控制对象的动态特性。
这个新的控制对象的输入仍然是减温水流量信号WB ,但输出信号为*22111t d d θθγθθθγ=+⋅,等效控制对象的传递函数可以根据方框图求得。
在静态时,微分器输出为零,所以等效控制对象的输出θ*1=θ1等效控制对象的输出中除了主汽温信号θ1外,还叠加了导前汽温θ2的微分信号。
由于θ2的惯性延迟比θ1小得多,因而等效对象的输出θ*1的惯性延迟比θ1小;采用导前汽温微分信号的双回路过热汽温控制系统原理框图双回路系统的等效方框图在静态时,微分器输出为零,所以等效控制对象的输出θ*1=θ1;在动态过程中,等效控制对象的输出中除了主汽温信号θ1外,还叠加了导前汽温θ2的微分信号。
由于θ2的惯性延迟比θ1小得多,因而等效对象的输出θ*1的惯性延迟比θ1小得多。
因此,加入导前汽温的微分信号的作用可以理解为改变了控制对象的动态特性,等效控制对象在减温水流量扰动下的特性,可见等效控制对象的输出θ*1比主汽温θ1的响应有很大的改善。
所以,在控制对象惯性迟延较大的情况下导前汽温微分信号的双回路汽温控制系统的控制品质远比单回路控制系统好。
采用导前汽温微分信号的控制系统是串级控制系统的变形前面已经分析说明过,对于惯性迟延大的控制对象,采用串级控制系统能获得较好的控制品质。
导前汽温微分信号的双回路系统虽然在形式上不同于串级系统,但把它当作一种变形的串级控制系统来研究也是可行的。
只要把采用导前汽温微分信号的控制系统等效变的串级控制系统,其中微分器传递函数的倒数()()*111T D D d W s T K T w s δ相当于串级控制系统中主调节器的传递函数,而调节器与微分器的传递函数,而调节器与微分器的传递函数乘积则[W T (S)W d (S)]相当于串级控制系统中副调节器的传递函数。
在采用导前汽温微分信号的双回路系统中,微分器和调节器的传递函数一般分别为()1D D d D K T s w s T s=+ ()111T i w s T s δ⎛⎫=+ ⎪⎝⎭(a)等效主调节器()()*111111D T d D D D D T s w s W s K T s K T s ⎛⎫+===+ ⎪⎝⎭ **11111i T s δ⎛⎫=+ ⎪⎝⎭由此可见,等效主调节器具有比例积分调节器的特性,它的参数为等效比例带:*1D K δ=等效积分时间:*1i D T T =(b)等效副调节()()()1211*1i D D T T d i D T s K T s W s W s W s T s T sδ+==+ ()111i i D D D D D i D T T T s K T T T T T sδ⎡⎤++-⎢⎥⎢⎥=+⎢⎥⎢⎥⎣⎦ 11111111D i D D D D D T T K K T T T s S T δδ⎡⎤⎡⎤--⎢⎥⎢⎥⎢⎥⎢⎥=+=++⎢⎥⎢⎥+⎢⎥⎢⎥⎣⎦⎣⎦在实际应用,通常D T 比i T 大得多,因此()*2**2211111D T i i K W s T s T s δδ⎛⎫⎛⎫≈+=+ ⎪ ⎪⎝⎭⎝⎭所以,等效副调节器也近似为具有比例积分调节器的特性,它的参数为 等效比例带:*2/D K δδ=等效积分时间:*2i i T T =当把采用导前微分信号的双回路控制系统等效为串级控制系统来分析时,可 以清楚地看出微分器参数D K 、D T 和调节器参数δ、i T 对控制系统性能的影响:(1)微分器参数D K 、D T 相当于串级系统中主调节器的比例带和积分时问。
按串级控制系统的分析方法,当副回路为快速随动系统时,增大D K 将使主回路(主汽温)的稳定性提高,但使主汽温的动态偏差增大。
增大D T 也会提高主回路的稳定性,但影响不太显著。
D T 增大后,主汽温控制过程的时间拉长。
(2)等效副调节器的比例带是/D K δ,积分时间是i T ,i T 主要影响副回路的控制过程时间,而/D K δ。
则影响副回路的稳定性和动态偏差。
但是,D K 既是副回路的调节器参数,又是主回路的调节器参数。
当D K 增大时,虽然提高了主回路的稳定性,却使副回路的稳定性下降。
所以,当需要增大D K 时,为了保持副回路的稳定性,应相应增大δ,使/D K δ的比值保持不变。
锅炉蒸汽温度自动控制系统的设计:运行状况:某电厂锅炉设备基本现状:该厂共有三台蒸汽锅炉,负责厂内的蒸汽供给任务。