研究生-高等光学-联合傅里叶变换相关图像识别-实验指导
最新联合傅里叶变换相关图像识别实验报告书
最新联合傅里叶变换相关图像识别实验报告书nXXX。
there have been many ns and XXX transform。
A new type of dual-channel joint transform correlator has been developed。
which calculates the optimal parameters and beam n parameters of the Fourier lens。
XXX joint correlators。
wavelet transform。
image n。
nal Fourier transform。
and logarithmic transform have been used。
The XXX。
which enhances high-frequency components and sharpens n peaks by taking the log n of the joint power spectrum。
This method has a simple algorithm。
low XXX。
and is suitable for real-time processing。
However。
it also strengthens noise while enhancing the high-frequency components of the power spectrum。
which affects XXX correlator。
which improves XXX the form of the log n。
The anti-XXX.Research TopicMost of the research on the above topics is limited to image processing of the original object image or power spectrum。
实验七光学图像相关识别
一.实验目的
1. 了解透镜的傅里叶变换功能及用光学方法实现相关运算的基本原理和方法。 2. 了解光学匹配滤波的原理,学习用全息技术制作匹配滤波器。 3. 了解光学匹配滤波相关识别的原理及 Vander Lugt 相关器(VLC)的基本结构和实现过程。 4. 了解光学联合变换图像相关识别的原理及联合变换相关器(JTC)的基本结构和实现过程。 5. 初步了解空间光调制器(SLM)的功能、作用及光电混合相关图像识别的基本结构。 6. 初步了解图像畸变对光学相关器性能的影响及其可能的解决方法。
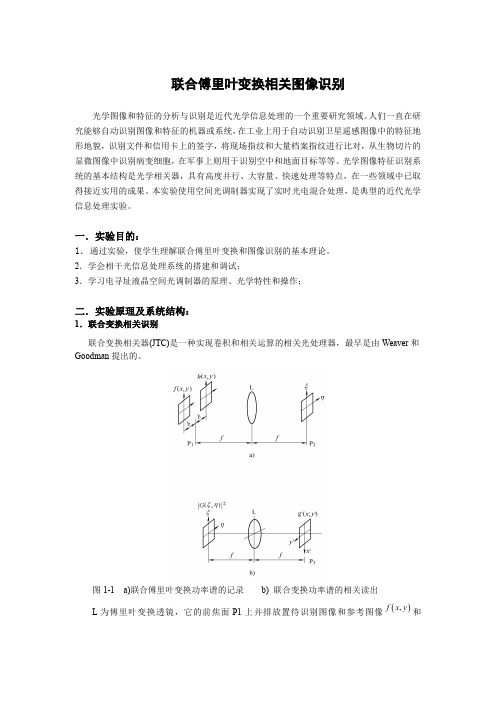
光学上实现卷积或相关运算的具体结构是 4f 光学系统,如图 2 所示:图中 FTL 表示傅
里叶变换透镜,P1、P2、P3 分别表示输入 面、傅立叶变换频谱面和输出面,它们分 别是 FTL 1 的前焦面、FTL1 的后焦面(同 时也是 FTL2 的前焦面)和 FTL2 的后焦 面。由相干光源发出、经扩束准直后的平
{ } FT T (u, v)R∗(u, v) = t( x, y) ☆ r(x, y) 。实现上述操作过程的具体结构和方法有两种:一种
是由密执安大学雷达实验室的 A. B Vander Lugt 于 1963 年提出的、以频域匹配滤波为原理的 Vander Lugt 相关器(Vander Lugt Correlator—VLC);另一种是由 C.S.Weaver 和 J.W.Gordman 于 1966 年提出的、以联合傅里叶变换(空域滤波)为原理的联合变换相关器(Joint Transform Correlator—JTC)。二者的区别在于 VLC 依赖于频域中滤波器的合成及滤波操作,而 JTC 依 赖于空域中滤波器合成及滤波操作。
1~2 个。
9. 扩束准直系统 2 套(包括:可三维调节的空间滤波器支架 2 套,与之配套的针孔(15 μ m —25 μ m)若干,扩束镜(显微物镜,25~40 倍)若干,直径 5~6cm、焦距 25cm 左右的
傅里叶变换实验技术指南
傅里叶变换实验技术指南傅里叶变换是一种常用的信号处理技术,在信号处理、图像处理、通信系统等领域广泛应用。
本文将为读者介绍傅里叶变换的基本原理和实验技术,以及如何使用傅里叶变换进行信号分析和图像处理。
一、傅里叶变换的基本原理傅里叶变换是一种将时域信号转换为频域信号的技术。
它可以将任意信号表示成许多正弦函数和余弦函数的叠加,从而能够更好地理解和分析信号的频率特性。
傅里叶变换的基本公式如下:F(ω) = ∫ f(t) * e^(-jωt) dt其中,F(ω)表示频域信号,f(t)表示时域信号,e^(-jωt)是一个复指数函数,ω为角频率。
二、进行傅里叶变换的实验技术1. 准备实验设备进行傅里叶变换的实验需要准备一台能够生成和采集信号的函数发生器或信号发生器,一台傅里叶变换仪器(例如频谱仪)以及连接线缆。
2. 选择合适的信号选择一个合适的信号用作实验的输入信号。
可以选择包含不同频率分量的复合信号,也可以直接输入单一频率的正弦波信号。
3. 连接信号发生器和傅里叶变换仪器使用相应的连接线将信号发生器和傅里叶变换仪器连接起来。
确保连接的稳定和可靠。
4. 设置信号发生器根据实验需要调整信号发生器的参数,包括频率、振幅和偏移量等。
可以逐渐改变这些参数,观察傅里叶变换仪器上的频谱分布情况。
5. 观察频谱图形使用傅里叶变换仪器可以获得输入信号的频谱图形。
观察频谱图形可以帮助我们理解信号的频率成分和能量分布情况。
可以通过改变信号发生器的参数,比如频率、振幅和相位等,来观察频谱图形的变化。
6. 分析频谱特性通过观察频谱图形,可以分析信号的频率特性,比如频率成分的数量、幅度和相位等。
频谱图形通常以幅度谱和相位谱的形式呈现,可以进一步分析信号的谐波分量、峰值频率和谱带宽等。
7. 应用傅里叶变换进行信号处理傅里叶变换不仅可以用于分析信号的频谱特性,还可以应用于信号处理任务。
比如,傅里叶变换在图像处理中常用于频域滤波、频域增强和图像压缩等任务。
实验二 图像的傅立叶变换
实验二图像的傅立叶变换一、实验目的1了解图像变换的意义和手段;2熟悉傅立叶变换的基本性质;3熟练掌握FFT变换方法及应用;4通过实验了解二维频谱的分布特点;5通过本实验掌握利用MATLAB编程实现数字图像的傅立叶变换。
6评价人眼对图像幅频特性和相频特性的敏感度。
二、实验内容:产生亮块图像f1(x,y)(128*128,暗处灰度值为0,亮处灰度值为255),对其进行FFT:(1)同屏显示原图f1和FFT(f1)的幅度谱图(2)令f2(x,y)=(-1)^(x+y)f1(x,y),重复以上过程,比较二者幅度谱的异同(3)将f2(x,y)顺进针旋转45度得到f3(x,y),对f3作FFT产生亮块图像f1(x,y),并存储三、实验原理1 应用傅立叶变换进行图像处理傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音和显示点等的作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题。
2 傅立叶(Fourier )变换的定义对于二维信号,二维Fourier 变换定义为:2()(,)(,)j ux uy F u v f x y e dxdy π∞∞-+-∞-∞=⎰⎰逆变换:2()(,)(,)j ux uy f x y F u v e dudv π∞∞+-∞-∞=⎰⎰二维离散傅立叶变换为:112()001(,)(,)i kN N j m n N Ni k F m n f i k eN π---+===∑∑ 逆变换:112()001(,)(,)i k N N j mn N Nm n f i k F m n eNπ--+===∑∑四、 实验分析1、 生成大小为128×128,暗处=0,亮处=255的图像图象f1(x,y)。
2、 对原图像进行傅立叶变换,再显示幅度频谱图,其间运用函数fftshift进行修正,使变换后的直流分量位于图形的中心。
3、 把空间的频率平面坐标系的原点移到(M/2,N/2)的位置,即令0/2u M =,0/2v N =,则)2/,2/()1)(,(N v M u F y x f y x --⇔-+上式表明:如果需要将图像频谱的原点从起点(0,0)移到图像的中点(M/2,N/2),只要将f(x,y)乘以因子(1)x y +-进行傅立叶变换即可实现。
图像的傅里叶变换实验报告
计算机科学与技术系实验报告专业名称计算机科学与技术课程名称数字图像处理项目名称Matlab语言、图像得傅里叶变换班级14计科2班学号1404011023姓名卢爱胜同组人员张佳佳、王世兜、张跃文实验日期2016、11、30一、实验目得与要求:(简述本次实验要求达到得目得,涉及到得相关知识点,实验得具体要求。
)实验目得:1了解图像变换得意义与手段;2熟悉傅立叶变换得基本性质;3熟练掌握FFT变换方法及应用;4通过实验了解二维频谱得分布特点;5通过本实验掌握利用MATLAB编程实现数字图像得傅立叶变换。
6评价人眼对图像幅频特性与相频特性得敏感度。
实验要求:应用傅立叶变换进行图像处理傅里叶变换就是线性系统分析得一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音与显示点等得作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题.对任何想在工作中有效应用数字图像处理技术得人来说,把时间用在学习与掌握博里叶变换上就是很有必要得。
二、实验内容(根据本次实验项目得具体任务与要求,完成相关内容,可包括:实验目得、算法原理、实验仪器、设备选型及连线图、算法描述或流程图、源代码、实验运行步骤、关键技术分析、测试数据与实验结果、其她)1、傅立叶(Fourier)变换得定义对于二维信号,二维Fourier变换定义为:逆变换:二维离散傅立叶变换为:逆变换:图像得傅立叶变换与一维信号得傅立叶变换变换一样,有快速算法,具体参见参考书目,有关傅立叶变换得快速算法得程序不难找到。
实际上,现在有实现傅立叶变换得芯片,可以实时实现傅立叶变换。
2、利用MATLAB软件实现数字图像傅立叶变换得程序:I=imread(‘原图像名、gif’);%读入原图像文件imshow(I); %显示原图像fftI=fft2(I);%二维离散傅立叶变换sfftI=fftshift(fftI);%直流分量移到频谱中心RR=real(sfftI); %取傅立叶变换得实部II=imag(sfftI); %取傅立叶变换得虚部A=sqrt(RR、^2+II、^2);%计算频谱幅值A=(A-min(min(A)))/(max(max(A))-min(min(A)))*225 %归一化figure;%设定窗口imshow(A); %显示原图像得频谱四、源代码clc;clearallI=imread('Fig0707(a)(Original)、tif、tif');%读入原图像文件imshow(I); %显示原图像title(’原始图像’)fftI=fft2(I);%二维离散傅立叶变换sfftI=fftshift(fftI); %直流分量移到频谱中心RR=real(sfftI);%取傅立叶变换得实部II=imag(sfftI); %取傅立叶变换得虚部A=sqrt(RR、^2+II、^2); %计算频谱幅值A=(A-min(min(A)))/(max(max(A))-min(min(A)))*225; %归一化figure; %设定窗口imshow(A); %显示原图像得频谱title('原始图像得频谱’)f1=ifft2(A); %用Fourier系数得幅度进行Fourier反变换f2=ifft2(angle(fftI)); %用Fourier系数得相位进行Fourier 反变换;figuresubplot 121;imshow(f1,[])title('幅度进行Fourier反变换’)subplot 122;imshow(f2,[])title(’相位进行Fourier反变换’)五、实验结果及分析原始图像原始图像的频谱幅度进行Fourier反变换相位进行Fourier反变换实验分析:本次试验研究了有关傅里叶算法方面得知识,将傅里叶变换应用在图像得处理上,让我学习到了傅里叶算法方面得知识,实践才就是成长得好道路。
傅立叶光学实验

•焦平面
•像平面
物7 理实验
网格的滤波实验
•网格
•网格频谱
物8 理实验
条形光阑
物9 理实验
可变光圈实验
在焦平面上放一个可变光圈:
光圈由小变大
中央零级通过—可以观察到傅里叶频率综合的
现象。
如果挡掉中央零级—可能是一片均匀的光
可能是反衬度相反的像。
物0 理实验
空间滤波实验
“二元振幅滤波器” ,相位滤波器,复数滤波器 1.低通滤波:只允许位于频谱面中心及附近的低频分量通
FTFT-1{g(x,y)}=FT-1FT{g(x,y)}=g(x,y)
物0 理实验
透镜的傅里叶变换性质
会聚透镜的本领—进行二维傅里叶变换
物体在前焦面上在透镜后焦面上得到的是准确的傅里叶变换 (其它的情况)
物平
面
透镜
频谱
面
f
f
物1 理实验
光源
物平
面
频谱
面
透镜
物2 理实验
光源
物7 理实验
再现光路
物8 理实验
再现说明
•第1、2项分别为f和g的自相关,位于光轴中心 •第3项为g f,中心位于x’=2a •第4项为 f g,中心位于x’=-2a
物9 理实验
计算机模拟
物0 理实验
计算机模拟
物1 理实验
实验方法
物2 理实验
旋转不变联合变换相关器
物3 理实验
•精品课件
傅立叶光学实验
物2 理实验
傅里叶光学的基础知识
傅里叶变换的定义 傅里叶变换的性质 透镜的傅里叶变换性质
物3 理实验
傅里叶光学的应用—光学信息处理
空间滤波 图像处理 图像识别 非相干光学信息处理
光电图像处理实验(傅立叶变换)
电子科技大学实验报告学生姓名: XXX学号: 2705XXXXXX指导教师:彭真明日期: 2010年4月6日一、实验室名称: 光电楼327机房二、实验项目名称: 图像变换(一)三、实验原理:傅立叶变换时信号处理领域中一个重要的里程碑,它在图像处理技术中童谣起着十分重要的作用,被广泛的应用于图像特征提取、图像增强与恢复、噪声抑制、纹理分析等多个方面。
1、离散傅立叶变换(DFT ):要把傅立叶变换应用到数字图像处理当中,就必须处理离散数据,离散傅立叶变换的提出使得这种数学方法能够和计算机技术联系起来。
正变换:逆变换:幅度:相位角:功率谱:2、快速傅立叶变换(FFT ):离散傅立叶变换运算量巨大,计算时间长,其运算次数正比于N^2,当N 比较大的时候,运算时间更是迅速增长。
二快速傅立叶变换的提出将傅立叶变换的复杂度由N^2下降到了NlgN/lg2,当N 很大时计算量可大大减少。
而快速傅立叶变换(FFT)需要进行基2或者基4的蝶形运算,算法上面较离散傅立叶变换困难。
∑∑-=-=+-=1010)//(2),(1),(M x N y N vy M ux j e y x f MN v u F π∑∑-=-=+=1010)//(2),(),(M x N y N vy M ux j e v u F y x f π3、离散余弦变换(DCT):为FT 的特殊形式,被展开的函数是实偶函数的傅氏变换,即只有余弦项。
变换核固定,利于硬件实现。
具有可分离特性,一次二维变换可分解为两次一维变换。
正变换: 逆变换:其中:四、实验目的:1. 了解各种图像正交变换的作用和用途;2. 掌握各种图像变换的方法和原理;3. 熟练掌握离散傅立叶变换(DFT)、离散余弦变换(DCT)的原理、方法和实现流程,熟悉两种变换的性质,并能对图像傅立叶变换的结果进行必要解释;4. 熟悉和掌握利用Matlab 工具进行图像傅立叶变换及离散余弦变换的基本步骤、MATLAB 函数使用及具体变换处理流程;5. 能熟练应用Matlab 工具对图像进行FFT 及DCT 处理,并能根据需要进行必要的频谱分析和可视化显示。
傅里叶变换光学实验

傅里叶变换光学系统一、实验目的和内容1、了解透镜对入射波前的相位调制原理。
2、加深对透镜复振幅、传递函数、透过率等参量的物理意义的认识。
3、观察透镜的傅氏变换(FT )图像,观察4f 系统的反傅氏变换(IFT )图像,并进行比较。
4、在4f 系统的变换平面(T )插入各种空间滤波器,观察各种试件相应的频谱处理图像。
二、实验原理1、透镜的FT 性质及常用函数与图形的关学频谱分析透镜由于本身厚度的不同,使得入射光在通过透镜时,各处走过的光程差不同,即所受时间延迟不同,因而具有相位调制能力。
图1 为简化分析,假设任意点入射光线在透镜中的传播距离等于改点沿光轴方向透镜的厚度,并忽略光强损失,即通过透镜的光波振幅分布不变,仅产生位相的变化,且其大小正比于透镜在该点的厚度。
设原复振幅分布为(,)L U x y 的光通过透镜后,其复振幅分布受到透镜的位相调制,附加了一个位相因子(,)x y ϕ后变为(,)L U x y ':(,)(,)e x p [(,L L U x y U x y j x y ϕ'= (1) 图1若对于任意一点(x ,y )透镜的厚度为(,)D x y ,透镜的中心厚度为0D 。
光线由该点通过透镜时在透镜中的距离为(,)D x y ,空气空的距离为0D -(,)D x y ,透镜折射率为n ,则该点的总的位相差为:00(,)[(,)](,)(1)(,)x y k D D x y knD x y kD k n D x y ϕ=-+=+- (2)(2)中的k =2π/λ,为入射光波波数。
用位相延迟因子(,)t x y 来表示即为:0(,)e x p ()e x p[(1)(,)]t x y j k D j k n D x y =- (3)由此可见只要知道透镜的厚度函数(,)D x y 就可得出其相位调制。
在球面镜傍轴区域,用抛物面近似球面,可以得到球面透镜的厚度函数为:22012111(,)()()2D x y D x y R R =-+- (4)其中1R 、2R 是构成透镜的两个球面的曲率半径。
实验2 图像的傅立叶变换
实验2 图像的傅立叶变换一、 实验目的1了解图像变换的意义和手段;2熟悉傅立叶变换的基本性质;3熟练掌握FFT 变换方法及应用;4通过实验了解二维频谱的分布特点;5通过本实验掌握利用MA TLAB 编程实现数字图像的傅立叶变换。
6评价人眼对图像幅频特性和相频特性的敏感度。
二、 实验原理1 应用傅立叶变换进行图像处理傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音和显示点等的作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题。
对任何想在工作中有效应用数字图像处理技术的人来说,把时间用在学习和掌握博里叶变换上是很有必要的。
2 傅立叶(Fourier )变换的定义对于二维信号,二维Fourier 变换定义为:2()(,)(,)j ux uy F u v f x y e dxdy π∞∞-+-∞-∞=⎰⎰逆变换: 2()(,)(,)j ux uy f x y F u v e dudv π∞∞+-∞-∞=⎰⎰二维离散傅立叶变换为: 112()001(,)(,)i k N N j m n N N i k F m n f i k e N π---+===∑∑ 逆变换:112()001(,)(,)i k N N j m n N N m n f i k F m n e N π--+===∑∑图像的傅立叶变换与一维信号的傅立叶变换变换一样,有快速算法,具体参见参考书目,有关傅立叶变换的快速算法的程序不难找到。
实际上,现在有实现傅立叶变换的芯片,可以实时实现傅立叶变换。
3利用MA TLAB软件实现数字图像傅立叶变换的程序:I=imread(‘原图像名.gif’); %读入原图像文件imshow(I); %显示原图像fftI=fft2(I); %二维离散傅立叶变换sfftI=fftshift(fftI); %直流分量移到频谱中心RR=real(sfftI); %取傅立叶变换的实部II=imag(sfftI); %取傅立叶变换的虚部A=sqrt(RR.^2+II.^2); %计算频谱幅值A=(A-min(min(A)))/(max(max(A))-min(min(A)))*225 %归一化figure; %设定窗口imshow(A); %显示原图像的频谱三、实验步骤(要求预习实验内容,编写好实现每一步骤的程序,可以参考后面的参考程序)1.将图像内容读入内存;2.用Fourier变换算法,对图像作二维Fourier变换;3.将其幅度谱进行搬移,在图像中心显示;4.用Fourier系数的幅度进行Fourier反变换;5.用Fourier系数的相位进行Fourier反变换;6.比较4、5的结果,评价人眼对图像幅频特性和相频特性的敏感度。
第四章实验指导(Experimentguidance)实验1图像的傅里叶变换…
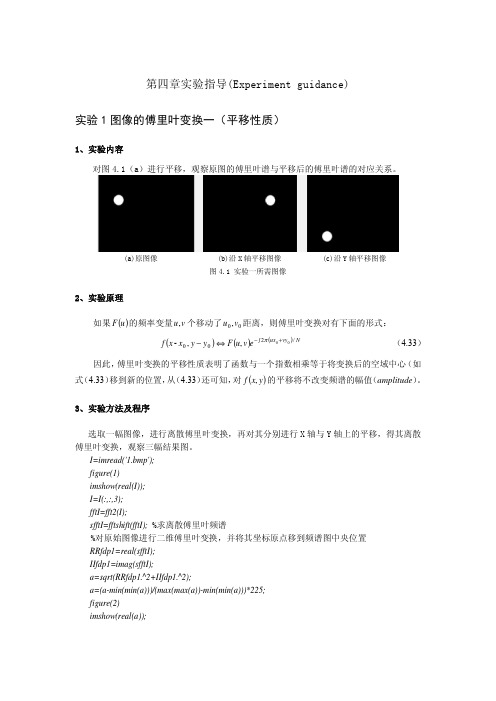
第四章实验指导(E x p e r i m e n t g u i d a n c e )实验1 图像的傅里叶变换一(平移性质)1、实验内容对图4.1(a )进行平移,观察原图的傅里叶谱与平移后的傅里叶谱的对应关系。
(a )原图像 (b )沿X 轴平移图像 (c )沿Y 轴平移图像图4.1 实验一所需图像2、实验原理如果()u F 的频率变量v u ,个移动了00,v u 距离,则傅里叶变换对有下面的形式:()()()N vy ux j e v u F y y x x f /20000,,-+−⇔−π (4.33) 因此,傅里叶变换的平移性质表明了函数与一个指数相乘等于将变换后的空域中心(如式(4.33)移到新的位置,从(4.33)还可知,对()y x f ,的平移将不改变频谱的幅值(amplitude )。
3、实验方法及程序 选取一幅图像,进行离散傅里叶变换,再对其分别进行X 轴与Y 轴上的平移,得其离散傅里叶变换,观察三幅结果图。
I=imread('1.bmp'); figure(1)imshow(real(I)); I=I(:,:,3); fftI=fft2(I);sfftI=fftshift(fftI);%求离散傅里叶频谱 %对原始图像进行二维傅里叶变换,并将其坐标原点移到频谱图中央位置 RRfdp1=real(sfftI); IIfdp1=imag(sfftI);a=sqrt(RRfdp1.^2+IIfdp1.^2);a=(a-min(min(a)))/(max(max(a))-min(min(a)))*225; figure(2)imshow(real(a));4、实验结果与分析1)实验结果如图4.1所示.(a )原图像 (b )原图像傅里叶幅度谱(c )沿X 轴平移图像 (d )沿X 轴平移后傅里叶幅度谱(e )沿Y 轴平移图像 (f )沿Y 轴平移后傅里叶幅度谱图4.2 实验一结果图2)结果分析由所得结果可知,原图像(a )分别经过X 轴与Y 轴上的平移后所得到的离散傅里叶变换频谱图(d )、(f )与原图像所得的傅里叶谱(b )基本相同。
图像的傅里叶变换实验报告

计算机科学与技术系实验报告专业名称计算机科学与技术 _____课程名称数字图像处理项目名称Matlab 语言、图像的傅里叶变换班级14 计科2班_________学号23 _____________姓名 _______ 卢爱胜______________同组人员张佳佳、王世兜、张跃文_________实验日期 ________________、实验目的与要求:(简述本次实验要求达到的目的,涉及到的相关知识点,实验的具体要求。
)实验目的:1 了解图像变换的意义和手段;2 熟悉傅立叶变换的基本性质;3 熟练掌握FFT 变换方法及应用;4 通过实验了解二维频谱的分布特点;5通过本实验掌握利用MATLABS程实现数字图像的傅立叶变换。
6 评价人眼对图像幅频特性和相频特性的敏感度。
实验要求:应用傅立叶变换进行图像处理傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音和显示点等的作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题。
对任何想在工作中有效应用数字图像处理技术的人来说,把时间用在学习和掌握博里叶变换上是很有必要的。
二、实验内容(根据本次实验项目的具体任务和要求,完成相关内容,可包括:实验目的、算法原理、实验仪器、设备选型及连线图、算法描述或流程图、源代码、实验运行步骤、关键技术分析、测试数据与实验结果、其他 )1. 傅立叶( Fourier )变换的定义对于二维信号,二维Fourier 变换定义为:F (u, v) f (x,y)e j2 (ux uy)dxdy逆变换:f (x, y) F (u,v)e j2 (ux uy)dudv二维离散傅立叶变换为:clc;clear alll=imread('Fig0707(a)(Original).'); imshow(l); %title(' 原始图像')fftl=fft2(l); sfftl=fftshift(fftl);RR=real(sfftl); ll=imag(sfftl);% % %%% % 读入原图像文件 显示原图像 二维离散傅立叶变换 直流分量移到频谱中心 取傅立叶变换的实部 取傅立叶变换的虚部 计算频谱幅值A=sqrt(RR.A2+ll.A2); A=(A-mi n(mi n( A)))/(max(max(A))-mi n(mi n( A)))*225;%figure; %imshow(A); %title(' 原始图像的频谱')f1=ifft2(A); %设定窗口 显示原图像的频谱 Fourier 系数的幅度进行 Fourier 系数的相位进行 归一化 Fourier 反变换 Fourier 反变换;d N 1N 1 j2 (m 丄 n 上) F(m, n) —f(i,k)e N NN i o k o 逆变换: d N 1N 1 j2 (m 丄 nl)f(i,k) 1F(m, n)e N NN m 0 n 0 图像的傅立叶变换与一维信号的傅立叶变换变换一样,有快速算法,具体参见参考书目,有关傅立叶变换的快速算法的程序不难找到 傅立叶变换的芯片,可以实时实现傅立叶变换。
研究生-高等光学-联合傅里叶变换相关图像识别-实验指导
五.附录 1.系统主要配置:
序号 (1) (2) (3) (4) (5) (6) (7) (8) (9) 名称 HeNe 内腔激光器 光束扩束准直系统 马赫-曾德尔干涉系统 图像采集组件 黑白监视器 傅里叶变换透镜 检测平晶组件 电寻址空间光调制器 可变衰减器 Φ30mm Φ40mm 含 CCD;图像卡;图像软件 9 寸;带模拟输入 Φ50mm;f300mm Φ50mm 规格 632.8nm;2mW;DH-HN250 数量 1 1 1 1 1 2 1 1 1 1 1
式中前两项是各自的自相关,而后两项则是彼此的互相关。 一般采用实时的空间光调制器作为平方律探测器,取代记录胶片,可充分体现联合变换 相关器的优越性。 具体内容请参考《傅里叶光学.第二版》 (吕乃光)321-323 页。 本系统就是根据联合傅里叶变换相关识别原理组件的,目的是通过该系统的搭建和分 析,深入理解图像相关识别的原理。 2.系统结构 根据上面的联合傅里叶变换相关识别的过程的介绍, 整个图像识别包括两个步骤, 即联 合傅里叶变换光谱的记录和联合变换功率谱的逆傅里叶变换。 而且采用可实时处理的空间光 调制器可提高系统的处理能力。 下面提供一套参考光路,以理解设计的思想。在实际搭建中,可采用的光路结构很多。 如图 1-2 所示,从 He-Ne 激光器发出的光束通过反射镜 I 和分光镜 I 分成两路,一路用于获
监视器 (相关输出)
II
透镜 II
计算机 (功率谱)
参考图像 透镜 I 马赫-曾德 尔干涉仪
分光镜 III 图 1-2 系统示意图
图 1-3 典型实验结果
三.实验内容及步骤
参见图 1-4 搭建光路。 1. 调节激光管夹持器,将 HeNe 激光束 1 调节高度适中,水平(与台面平行) ,作为主光 轴(中心高) 。
光学图像识别专题

二、实验仪器
He-Ne 激光器一台、可变光阑一块、光密度盘一块、准直透镜一块、光学平晶一块、空间滤波器一 块、半透半反镜三块、全反射镜两块、目标物和识别物各一个、观察屏一个、傅里叶变换透镜两块、面 阵 CCD 光探测器一个、电寻址空间光调制器一台、偏振片一块、黑白显示器一台、微机一台、图像处 理软件一套
∆=
四、实验内容
f ′′ A′ ⋅ ⋅ 2a f ′ A′′
(10)
该专题实验内容可以概括为:将待识别的目标图像与参考图像通过马赫-曾德尔干涉仪并行输入相 干光处理系统,用 CCD 将联合傅里叶变换谱转换成功率谱,输入到电寻址的液晶空间光调制器 LCD 上, 再一次通过透镜的傅里叶变换形成相关输出, 由 CCD 探测并显示。 如果目标图像与参考图像的基本特征 一致,则输出图像具有一对明显的相关峰。由于内容较多,可分为三部分来完成。 (一) 调节获得宽束的准直平行光 光学实验前各光学元件是否调节到正常状态至关重要, 这不仅直接影响实验结果, 有时甚至由于仪 器没调好,致使实验无法进行。 光学元件及光路的调整通常分粗调和细调两步进行。 粗调即利用目测进行调整, 细调即利用光学系 统本身或其它光学仪器进一步调整。下面是本次实验要调整的内容和方法: 1. 使光线与光学平台平行。把激光束调到适当的高度,可变光阑通光孔径调到与激光束直 径大致相 同。反复调节激光器,使光阑在离激光器不同距离时,光束都正好通过通光孔。
4
2. 调节所有光学元件使它们共轴,即使光束通过各元件通光孔中心,达到光轴重合。 3、 光束扩束和滤波。 光束扩束和滤波。 由于激光器出射激光为细激光束,为了进行扩束及消除扩束镜及在扩束镜前光束经过的光学元件上 的尘埃等产生的衍射光,实验中使用了针孔空间滤波器。空间滤波器由扩束镜(显微物镜) 、针孔及可 调支架构成。若针孔处于扩束镜后焦点处,细激光束经扩束镜后将聚焦在针孔上,针孔的作用是限制光 源的大小,可以认为此时针孔处为一个理想的点光源。
实验一 图像的傅立叶变换

实验一图像的傅立叶变换一、实验目的1了解图像变换的意义和手段;2熟悉傅里叶变换的孩本性质;3热练掌握FFT酌方法反应用;4通过实验了解二维频谱的分布特点;5通过本实验掌握利用MATLAB编程实现数字图像的傅立叶变换。
二、实验仪器1计算机;2 MATLAB程序;3移动式存储器(软盘、U盘等)。
4记录用的笔、纸。
三、实验原理1应用傅立叶变换进行图像处理傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音和显示点等的作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题。
对任何想在工作中有效应用数字图像处理技术的人来说,把时间用在学习和掌握博里叶变换上是很有必要的。
2傅立叶(Fourier)变换的定义对于二维信号,二维Fourier变换定义为:二维离散傅立叶变换为:图像的傅立叶变换与一维信号的傅立叶变换变换一样,有快速算法,具体参见参考书目,有关傅立叶变换的快速算法的程序不难找到。
实际上,现在有实现傅立叶变换的芯片,可以实时实现傅立叶变换。
3利用MATLAB软件实现数字图像傅立叶变换、DCT变换的程序:四、实验步骤1、打开计算机,安装和启动MATLAB程序;程序组中“work”文件夹中应有待处理的图像文件;2、利用MatLab工具箱中的函数编制FFT频谱显示的函数;3、a).调入、显示图像b)对这图像做FFT、DCT并利用自编的函数显示其频谱;c)讨论不同的图像内容与FFT、DCT频谱之间的对应关系。
4、记录和整理实验报告。
五、实验内容Matlab源程序如下:clcclear allimg=imread('Dolphin.jpg');subplot(2,2,1),imshow(img);title('原图');f=rgb2gray(img);F=fft2(f);subplot(2,2,2),imshow(F);title('傅里叶变换');%二维傅里叶变换FS=fftshift(F);%频率图%频谱S=log(1+abs(FS));subplot(2,2,3);imshow(S,[])title('直接变换频谱图');%二维傅里叶逆变换fr=real(ifft2(ifftshift(FS)));%频域的图反变ret=im2uint8(mat2gray(fr));%取其灰度图subplot(2,2,4),imshow(ret);title('逆傅里叶变换');I=imread('logo.tif');figure(2);imshow(I);DCT=dct2(I);figure(3);imshow(log(abs(DCT)),[ ]);六、实验结果在matlab中运行后,实验结果如图:原图傅里叶变换直接变换频谱图逆傅里叶变换七、思考题1.傅里叶变换有哪些重要的性质?答:线性性质、奇偶虚实性、对称性质、尺度变换性质、时移性质、频移特性。
联合傅立叶变换相关图像识别实验总结

联合傅立叶变换相关图像识别实验总结摘要:本实验总结主要论述联合傅立叶变换相关图像识别实验的基本原理,实验过程,实验分析及实验心得体会。
关键词傅立叶变换功率谱相关峰联合傅立叶变换(Joint-Fourier transform)是重要的相关处理,在指纹识别、字符识别、目标识别等领域已逐步进入实用化阶段。
而联合傅立叶变换相关图像识别中以空间光调制器实现光电混合处理最为关键,本实验就以此展开具体研究。
首先本实验依据的基本原理是:实验通过激光作用使待识别图像(如待识别指纹、文字标识)和参考图像(如参考指纹、文字标识)分别产生相应的像经透镜傅立叶变换后在谱面形成复振幅分布,经平方律介质或器件(如本实验采用的高分辨率的CCD和液晶显示器LCD)将其转换为功率谱,然后观察者可通过相关输出观看待识别图像和参考图像形成的亮斑(相关峰)的亮暗和弥散度来判断二者的相关程度,从而达到识别待测物的目的。
实验中联合傅立叶变换主要基于一下原理:(g(f图4-Ⅰ如图图4-Ⅰ(,)f x y 、(,)g x y 分别为待识别像、参考像在透镜中的透过率,则经透镜的傅立叶变换后在谱面uv 上形成复振幅分布:[]()2(,)(,)(,)exp S u v f x a y g x a y i xu yv dxdy f πλ+∞+∞-∞-∞⎡⎤=++--+⎢⎥⎣⎦⎰⎰ 22exp (,)exp (,)iau F u v i au G u v f f ππλλ⎡⎤⎡⎤=-+-⎢⎥⎢⎥⎣⎦⎣⎦ 式中F 、G 分别是f,g 的傅立叶变换。
实验中图像最终判别依据原理:经平均律介质即本实验高分辨率CCD 和液晶显示器LCD 转换后,光信号转换为电信号最终在显示器上呈现亮斑(相关峰)。
从光学观点来看,联合变换的功率谱为杨氏条纹,通过傅立叶转换后形成0级和1级亮斑。
如果两图像相同干涉加强,形成“峰”的亮度大,若两者部分相同“峰”呈现较暗弥散状态,若不相同,则不形成“峰”。
第4章光学图像识别
4.1 图像识别和光学相关器
很久以来,人们一直在研究能够识别物体的 机器,这种机器能代替人们从事枯燥乏味的重复 性劳动及危险性的工作.例如: 字符识别机能代替邮递员分拣邮件; 自动签名或指纹识别机能代替工作人员检验签字或 指纹; 在军事上,首先用图像识别系统辨认对方的目标, 诸如导弹、车辆、建筑,而后用武器自动摧毁经 过识别的目标; 在医学上,图像识别技术则用于识别某一类特定的 细胞,然后进行计数.
器用光学方法实现。当然最为简单而实用的
办法是用变焦镜(ZOOM),然而这将包含一 个机械的动作,而且不能算作是并行处理器。来自4.8 联合变换相关器
光学联合变换相关器(JTC)最早是由Weaver 和Goodman,以及Rau 提出来的.
图4.15 联合变换功率谱的记录 S(u,v) = ∞-∞ f(x+a,y)+g(x-a, y)
*exp[ - i 2/f (xu+yv)] dxdy S(u,v)称为f(x,y)和g(x,y)的联合傅里叶谱.
关于位移的变换法, S(u,v)则改写为
S(u,v)=exp[ i2au/] F(u,v)+exp[ -i2au/f] G(u,v) 式中F(u,v) f(x,y), G(u,v) g(x,y)
旋转不变VLC的实例 图4.14 给出旋转不变的相关峰,指示了三 个不同取向的字母 E 的存在,在识别过程 中取了适当的阂值.
图4.14 对字母 E识别的旋转 不变相关输出
4.7 比例不变 Vander Lugt 相关器
比例不变又称尺度缩放不变,意思是说目标 图形与参考图形相似时,仍有相关峰输出. 引入下面的变量代换: = ln[x], = ln[y] 图形函数表为 f (, ) = f (ln[x], ln[y]) 对原函数进行 倍的比例缩放的结果为
傅里叶光学实验报告

傅里叶光学实验报告摘要:本实验主要是通过傅里叶光学的实验,研究光的干涉和衍射现象以及傅里叶变换的原理与应用。
在实验中,我们用干涉仪观察了两个光源的干涉现象,并利用光栅观察了光的衍射现象。
实验结果表明,光的干涉和衍射具有波动性和干涉性,傅里叶变换能够将信号从时域转换到频域。
1.引言2.实验装置实验主要用到了干涉仪和光栅。
干涉仪是由两个光源和一系列光学元件组成的装置,用于观察光的干涉现象。
光栅则是一种特殊的光学元件,能够通过衍射产生多个光斑。
3.实验步骤3.1干涉实验首先我们调整干涉仪的各个光路元件,使得两个光源的光线通过干涉仪后能够叠加在一起。
接着,我们调整干涉仪的反射镜,使得两束光叠加后的干涉条纹清晰可见。
在实验中,我们发现当两个光源相位差恰好为0时,干涉条纹最为明显;而当相位差为180度时,干涉条纹相消。
这说明光的干涉现象与光源的相位差有关。
3.2衍射实验接下来,我们使用光栅进行衍射实验。
将光栅置于光源前方,然后调整光栅的位置和角度,使得衍射光斑能够清晰可见。
实验中,我们观察到了光栅产生的多个光斑,这是由于光经过光栅后发生了衍射现象。
3.3傅里叶变换实验最后,我们进行了傅里叶变换实验。
在实验中,我们使用傅里叶变换将信号从时域转换到频域。
通过调整输入信号的频率,我们观察到傅里叶变换的输出结果呈现出不同的频谱。
4.结果与讨论实验结果表明,光的干涉和衍射现象能够用波动光学的理论进行解释。
干涉实验显示了光的相位差对干涉条纹的影响,而衍射实验则是光波通过光栅后发生了弯曲现象。
傅里叶变换实验则展示了将信号从时域转换到频域的能力。
在实际应用中,傅里叶光学在光学成像、信号处理等领域具有重要作用。
例如,利用傅里叶变换可以对图像进行去噪、增强等处理,同时也可以通过干涉和衍射现象实现光学传感器、光学显微镜等设备。
5.结论通过本次实验,我们深入了解了光的干涉和衍射现象以及傅里叶变换的原理与应用。
实验结果验证了光的波动性和干涉性,同时也为我们在光学领域的研究与应用提供了基础知识和实验基础。
2021年图像的傅里叶变换实验报告

计算机科学与技术系实验报告专业名称计算机科学与技术课程名称数字图像处理项目名称Matlab语言、图像傅里叶变换班级14计科2班学号姓名卢爱胜同组人员张佳佳、王世兜、张跃文试验日期 .11.30一、 试验目与要求:(简述此次试验要求达成目, 包含到相关知识点, 试验具体要求。
) 试验目:1了解图像变换意义和手段;2熟悉傅立叶变换基础性质;3熟练掌握FFT 变换方法及应用;4经过试验了解二维频谱分布特点;5经过本试验掌握利用MATLAB 编程实现数字图像傅立叶变换。
6评价人眼对图像幅频特征和相频特征敏感度。
试验要求:应用傅立叶变换进行图像处理傅里叶变换是线性系统分析一个有力工具, 它能够定量地分析诸如数字化系统、 采样点、 电子放大器、 卷积滤波器、 噪音和显示点等作用。
经过试验培养这项技能, 将有利于处理大多数图像处理问题。
对任何想在工作中有效应用数字图像处理技术人来说, 把时间用在学习和掌握博里叶变换上是很有必需。
二、 试验内容(依据此次试验项目具体任务和要求, 完成相关内容, 可包含: 试验目、 算法原理、 试验仪器、 设备选型及连线图、 算法描述或步骤图、 源代码、 试验运行步骤、 关键技术分析、 测试数据与试验结果、 其她 )1.傅立叶(Fourier )变换定义对于二维信号, 二维Fourier 变换定义为:2()(,)(,)j ux uy F u v f x y e dxdy π∞∞-+-∞-∞=⎰⎰逆变换: 2()(,)(,)j ux uy f x y F u v e dudv π∞∞+-∞-∞=⎰⎰二维离散傅立叶变换为:112()001(,)(,)i k N N j m n N N i k F m n f i k e N π---+===∑∑ 逆变换:112()001(,)(,)i k N N j m n N N m n f i k F m n e N π--+===∑∑图像傅立叶变换与一维信号傅立叶变换变换一样, 有快速算法, 具体参见参考书目, 相关傅立叶变换快速算法程序不难找到。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过透镜进行傅里叶变换,透镜后焦面 P2 上的复振幅分布为
2 2 G , F , exp j b H , exp j b f f G , F , H , g x, y f x, y h x, y G , 其中, 、 和 分别是 、 和 的空间频谱, 并称
用银盐胶片作记录媒质,费时的洗相过程限制了对图像的实时处理。另外,相干光系统只能 用相干光对输入透明片作空间调制, 不允许非相于图像的直接输入。 为了实时处理就需要发 展一种器件,从而出现了实时空间光调制器。 目前实时空间光调制器还处在研究和发展阶段, 正在研制的器件种类繁多, 如利用泡克 耳斯效应的 DKDP 和 PROM 器件,利用混合场效应的液晶光阀,利用表面形变的热塑和光导热 塑记录媒质,以及声光、磁光效应的器件。 空间光调制器的参量很多,主要参量有:灵敏度、分辨率 对比度 灰度等级、线性动态范 围、存 s 储能力、擦除性能、重复使用次数、光学质量等,要根据应用要求来作某种选择。 例如,DKDP 器件在擦除、存储和光学质量方面较好,而液晶光阀在不需要存储情况下,是 有希望的器件,尤其在转换非相干光图像为相干光图像上是目前应用最普遍的器件。 为液晶光阀的结构图。PROM 器件也是较好的转换器件。空间光调制器将是光电混合 处理系统中的关键器件之一。
为
f x, y
和
h x, y
的联合傅里叶谱。
在 P2 平面用记录介质或其他平方律探测器进行光强记录,得到联合傅里叶变换的功率谱
2 2 2 4 4 G , F , H , F * , H , exp j b F , H * , exp j b f f
联合傅里叶变换相关图像识别
光学图像和特征的分析与识别是近代光学信息处理的一个重要研究领域。 人们一直在研 究能够自动识别图像和特征的机器或系统, 在工业上用于自动识别卫星遥感图像中的特征地 形地貌,识别文件和信用卡上的签字,将现场指纹和大量档案指纹进行比对,从生物切片的 显微图像中识别病变细胞, 在军事上则用于识别空中和地面目标等等。光学图像特征识别系 统的基本结构是光学相关器,具有高度并行、大容量、快速处理等特点,在一些领域中已取 得接近实用的成果。 本实验使用空间光调制器实现了实时光电混合处理, 是典型的近代光学 信息处理实验。
得联合傅里叶变换光谱,另一路则实现联合傅里叶变换功率谱的实时傅里叶逆变换。 将待识别的目标图像与参考图像通过马赫-曾德尔干涉仪并行输入相干光处理系统,用 CCD 将联合傅里叶变换谱转换成功率谱,送入计算机获得与之对应的信号,利用计算机调 制电寻址的液晶空间光调制器 LCD。则 LCD 上的功率谱通过透镜的傅里叶变换形成相关输 出,由 CCD 探测并显示。如果目标图像与参考图像的基本特征一致,则输出图像具有一对 明显的相关峰。
图 1-4. 系统光路
四.调节技巧与关键部分原理
1.空间滤波器的使用 由于激光器谐振腔镜的衍射和发光机理导致出光光强不均匀和衍射杂斑的出现。 为了减 小这些干扰,得到均匀的光斑,我们采用空间滤波器来代替普通的扩束透镜。其原理是采用 小孔滤波的方法,保留相对均匀的 0 级光斑。 在小孔滤波时,我们需要进行准直。方法是先把滤波器上反过来利用物镜做括束,让括 束光斑以之前的激光器准直用的光阑中心为圆心,这样就能保证光斑中心和激光光束共轴 了。 把滤波器再掉转,按上述方法使共轴,加上针孔,转动螺纹副使物镜向针孔运动,同时 二维调节针孔,这时能在针孔后方出现小孔衍射图样。当运动到某一位置时,便能得到明亮 均匀的光斑。 2.分光光楔的安装 为了避免分光片上下面反射形成的干涉干扰, 我们选用分光光楔来分开两路反射光,为 了确保实验光路的等高,楔面应该水平放置。半透半反面的选择可利用镜面反射原理,用某 物离近镜面,判断成像远近来区分光楔两个面。
五.附录 1.系统主要配置:
序号 (1) (2) (3) (4) (5) (6) (7) (8) (9) 名称 HeNe 内腔激光器 光束扩束准直系统 马赫-曾德尔干涉系统 图像采集组件 黑白监视器 傅里叶变换透镜 检测平晶组件 电寻址空间光调制器 可变衰减器 Φ30mm Φ40mm 含 CCD;图像卡;图像软件 9 寸;带模拟输入 Φ50mm;f300mm Φ50mm 规格 632.8nm;2mW;DH-HN250 数量 1 1 1 1 1 2 1 1 1 1 1
监视器 (相关输出)
CCD II
透镜 II
计算机 (功率谱)
参考图像 透镜 I 马赫-曾德 尔干涉仪
分光镜 III 图 1-2 系统示意图
图 1-3 典型实验结果
三.实验内容及步骤
参见图 1-4 搭建光路。 1. 调节激光管夹持器,将 HeNe 激光束 1 调节高度适中,水平(与台面平行) ,作为主光 轴(中心高) 。
1024 768
光密度 0-3.0;连续可调 带纵向移动平台;3 组对比物
(10) 目标识别物 (11) 讲义
2.实时空间光调制器(real-time spatial light modulator)
使得相干处理系统能输入非相干光图像和随时间变化的图像的器件。相干光处理系统 的最大优点是二维平行处理、信息容量大,运算速度快。但是目前的输入图像和空间滤波都
一.实验目的: 1.通过实验,使学生理解联合傅里叶变换和图像识别的基本理论。
2.学会相干光信息处理系统的搭建和调试; 3.学习电寻址液晶空间光调制器的原理、光学特性和操作;
二.实验原理及系统结构:
1.联合变换相关识别 联合变换相关器(JTC)是一种实现卷积和相关运算的相关光处理器,最早是由 Weaver 和 Goodman 提出的。
2. 调整所有光学元件(分光光楔, 反射镜,空间滤波器,透镜等等)的高度, 使它们的中 心与光轴重合, 即共轴。 3. 放置圆形可调衰减器 2, 调节光路中 HeNe 激光束的强度(初始调光路的时候先调到 最强) 。 4. 光束通过空间滤波器 3 进行扩束,并通过调节针孔进行滤波,使扩束形成亮度均匀柔 和的圆光斑。 5. 放置透镜 4 进行光束准直。因为准直透镜的焦距是 180mm,所以该透镜应放在针孔后 180mm 左右的位置,用白纸在准直透镜后记录一下光斑的大小,然后在较远的位置再 记录一下光斑的大小,如果不一致需要前后调整一下准直透镜的位置,直到远近光斑 大小基本一致。 6. 放置可变光阑 5 到光斑中心,将光斑直径大小限制为 10mm 左右。 7. 用分光光楔 6 分成两束,光路 I(透射光) 、II(反射光), 使其互成直角。 在 I 光束中的调整 8. 搭建马赫-曾德干涉系统(如图 1-4-I 光路)。 该系统由两个分光光楔 7、12 和两个反 射镜 9、8 组成。 (a)通过分光光楔 7 分光,用反射镜 8、9 分别反射到分光光楔 12 处, 使两束光合二为一。通过分别调节元件 9、12 的二维俯仰,使通过分光光楔 12 出射 的两束光(斑)在近、远处都要重合在一起(比如调整反射镜 9 俯仰使近处的光斑重 合,那么就要调整光楔 12 俯仰使远处的光斑重合) 。 9. 在马-曾干涉光路的两个臂内分别放置两片目标识别物板 10、11,两块识别物板到分 光光楔 12 的距离要相等,而且两块板的左右要相反(因为目标识别物板 10 相对光楔 12 为镜面反射) 。 10. 放置傅变透镜 13,距离识别物板 11 的距离为 300mm(13 的焦距) 。 11. 在傅变透镜 13 的后焦面位置放置 CCD14,并连接到已安装图像采集卡的电脑 15 上, 通过图像采集软件观测 CCD14 拍摄到的图像。分别将两目标物识别板上的相同字符移 动到光斑中,再把圆形可调衰减器 2 条街的衰减幅度大些,即可在电脑 15 上 看到清 晰的联合傅里叶变换功率谱(杨氏条纹) ,如果分别将两目标识别物板的不同字符移动 到光斑中,则看不到清晰的功率谱(杨氏条纹) 。 在 II 光束中的调整 12. 在本公司提供的空间光调制器 17 前后各放一个偏振片 16、 18 空间光调制器 17 需要得 到电脑 15 的视频信号(需要一个视频信号分频器) 。 13. 在 18 后面放一傅里叶变换透镜 19, 且透镜 19 到空间光调制器 17 的距离为 300mm (焦 距) 。 14. 放置 CCD20 在比,则可在 21 上看到一对清晰锐利的相关峰点,否则相关峰的锐度变差(暗淡 弥散) ,相关峰可随两字符的相对移动而移动。在本实验系统中可依次对比“大大” , “圆孔圆孔” , “恒恒” , “大恒”
式中前两项是各自的自相关,而后两项则是彼此的互相关。 一般采用实时的空间光调制器作为平方律探测器,取代记录胶片,可充分体现联合变换 相关器的优越性。 具体内容请参考《傅里叶光学.第二版》 (吕乃光)321-323 页。 本系统就是根据联合傅里叶变换相关识别原理组件的,目的是通过该系统的搭建和分 析,深入理解图像相关识别的原理。 2.系统结构 根据上面的联合傅里叶变换相关识别的过程的介绍, 整个图像识别包括两个步骤, 即联 合傅里叶变换光谱的记录和联合变换功率谱的逆傅里叶变换。 而且采用可实时处理的空间光 调制器可提高系统的处理能力。 下面提供一套参考光路,以理解设计的思想。在实际搭建中,可采用的光路结构很多。 如图 1-2 所示,从 He-Ne 激光器发出的光束通过反射镜 I 和分光镜 I 分成两路,一路用于获
3.马赫-曾特干涉系统的搭建 一定要注意透射光与反射光的重合不只是意味着在某一处重合,而是在远近都要找重 合。技巧是在调节远处的重合时,动光楔的二维调节; 在调节近处的重合时,调节作为反射 光路的反射镜,直到远近都重合时,便能得到干涉条纹。作为透射光一路的反射镜不动。 4.目标识别物板的放置 二个识别物板分别放在马赫-曾特二臂中,其中一面是利用分光光楔的反射原理,所以 在放置时要反着放,即一个是大恒,另一个是恒大。在放置识别板和下面的移动台时,一定 要保证与光路垂直。 因为实验的基本原理是要分析物与鉴别物的相关性, 放置不好则在移动 时影响时不变系统。 5.空间光调制器原理及使用 在分光光楔后放置一个傅里叶变换透镜,透镜的前焦面放置透射光光路的目标识别物 板,透镜的后焦面是相关识别的谱面,在电脑上,我们能够接收到它的功率谱。空间光调制 器的作用是通过分频器把功率谱的图像加载到液晶片上, 相当于一个图像光栅,从而对它做 一次新的傅里叶变换得到相关峰的谱。 一定注意的是, 第二次傅里叶变换不要和傅里叶逆变 换搞混,在 SLM 上加载的是第一次傅里叶变换功率谱的像,在第二次变换中,它是一个新的 物。另外,在使用 SLM 时,应在前后各加一个偏振片,旋转之一,保证二片正交。