舰载遥测设备伺服跟踪视轴稳定方法研究
一种舰载伺服稳定平台的结构设计
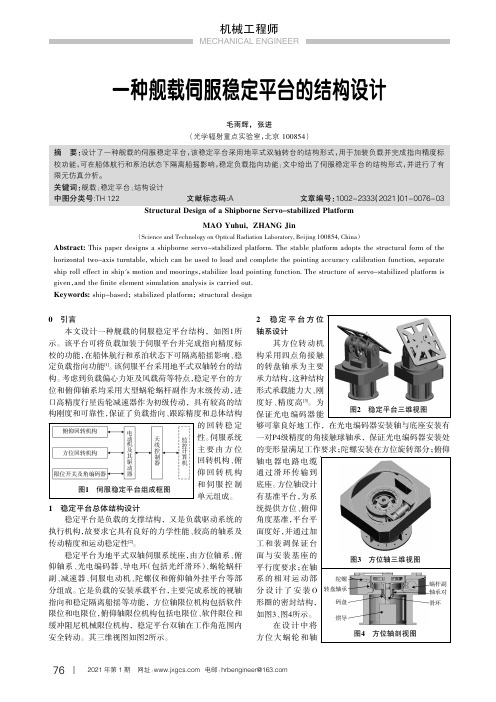
2021年第1期网址: 电邮:*******************一种舰载伺服稳定平台的结构设计毛雨辉,张进(光学辐射重点实验室,北京100854)图3方位轴三维视图陀螺转盘轴承码盘惯导蜗杆副轴承对滑环图4方位轴剖视图引言本文设计一种舰载的伺服稳定平台结构,如图1所示。
该平台可将负载加装于伺服平台并完成指向精度标校的功能,在船体航行和系泊状态下可隔离船摇影响、稳定负载指向功能[1]。
该伺服平台采用地平式双轴转台的结构。
考虑到负载偏心力矩及风载荷等特点,稳定平台的方位和俯仰轴系均采用大型蜗轮蜗杆副作为末级传动,进口高精度行星齿轮减速器作为初级传动,具有较高的结构刚度和可靠性,保证了负载指向、跟踪精度和总体结构的回转稳定性。
伺服系统主要由方位回转机构、俯仰回转机构和伺服控制单元组成。
1稳定平台总体结构设计稳定平台是负载的支撑结构,又是负载驱动系统的执行机构,故要求它具有良好的力学性能、较高的轴系及传动精度和运动稳定性[2]。
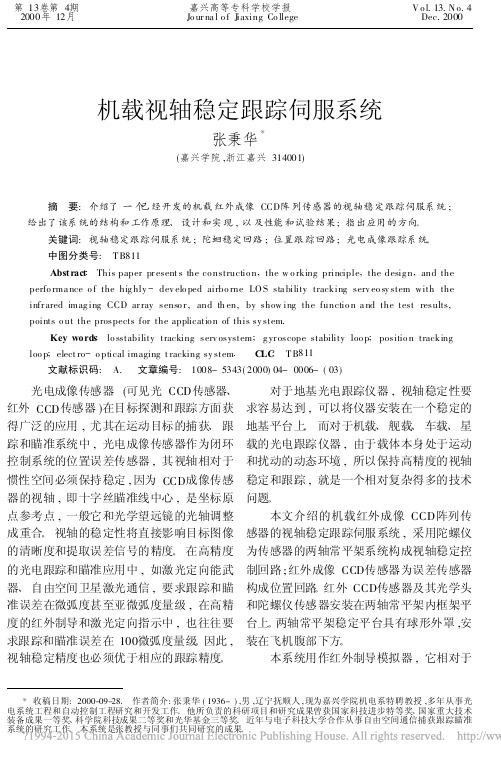
稳定平台为地平式双轴伺服系统座,由方位轴系、俯仰轴系、光电编码器、导电环(包括光纤滑环)、蜗轮蜗杆副、减速器、伺服电动机、陀螺仪和俯仰轴外挂平台等部分组成。
它是负载的安装承载平台,主要完成系统的视轴指向和稳定隔离船摇等功能,方位轴限位机构包括软件限位和电限位,俯仰轴限位机构包括电限位、软件限位和缓冲阻尼机械限位机构,稳定平台双轴在工作角范围内安全转动。
其三维视图如图2所示。
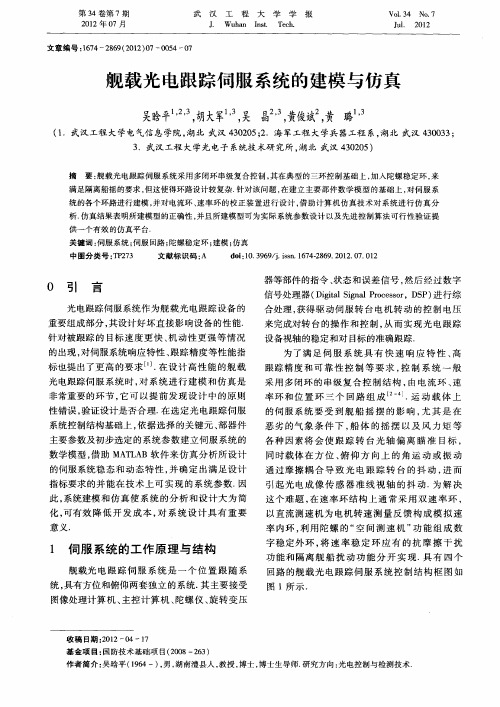
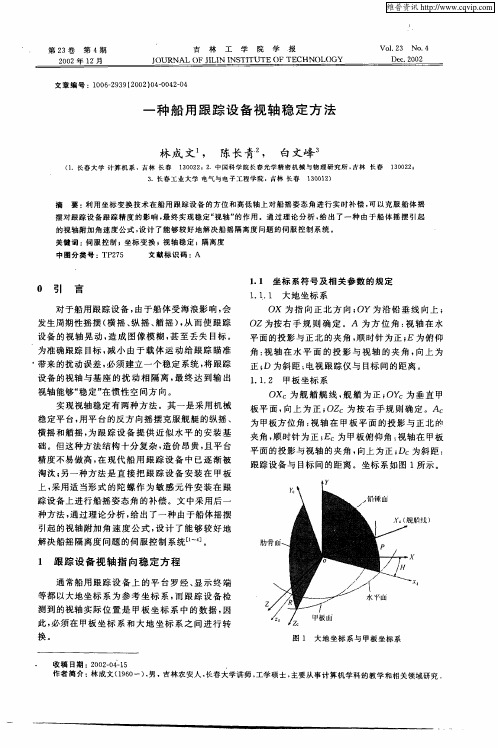
2稳定平台方位轴系设计其方位转动机构采用四点角接触的转盘轴承为主要承力结构,这种结构形式承载能力大、刚度好、精度高[3]。
为保证光电编码器能够可靠良好地工作,在光电编码器安装轴与底座安装有一对P4级精度的角接触球轴承,保证光电编码器安装处的变形量满足工作要求;陀螺安装在方位旋转部分;俯仰轴电器电路电缆通过滑环传输到底座。
方位轴设计有基准平台,为系统提供方位、俯仰角度基准,平台平面度好,并通过加工和装调保证台面与安装基座的平行度要求;在轴系的相对运动部分设计了安装O 如图3、图4所示。
运动平台捕获 跟踪与瞄准系统视轴稳定技术研究

三、结论
高精度机载光电平台视轴稳定技术是当前研究的热点问题。通过对控制系统、 传感器技术、执行机构设计以及数据处理与算法优化的研究,可以进一步提高光 电平台的性能和精度,为军事侦查、远程监控、科研测量等领域的发展提供强有 力的技术支持。未来,随着科技的不断发展,高精度机载光电平台视轴稳定技术 将会得到更广泛的应用和推广。
3、执行机构设计
执行机构是实现视轴稳定的关键部分。在设计执行机构时,需要考虑机构的 响应速度、精度、可靠性等因素。常用的执行机构包括电机、液压系统等。其中, 电机具有体积小、重量轻、效率高的优点,但需要精确的控制算法;液压系统具 有力矩大、稳定性好的优点,但响应速度较慢。因此,在实际应用中,需要根据 具体情况选择合适的执行机构。
1、控制系统设计
控制系统是高精度机载光电平台视轴稳定技术的核心部分。在设计控制系统 时,需要考虑系统的稳定性、快速性、准确性。常用的控制方法包括PID控制、 模糊控制、最优控制等。其中,PID控制由于其简单、稳定、可靠的特点,被广 泛应用于实际工程中。
2、传感器技术
传感器在视轴稳定系统中起着至关重要的作用。它能够实时获取光电平台的 姿态信息,并将其传递给控制系统。常用的传感器包括陀螺仪、加速度计、GPS 等。其中,陀螺仪能够提供准确的姿态信息,但存在漂移误差;加速度计能够提 供重力方向的信息,但易受外部振动的影响;GPS能够提供全球定位信息,但精 度较低。因此,在实际应用中,需要结合多种传感器的优点,进行优化组合。
一、视轴稳定技术概述
视轴稳定技术是通过对光电平台的姿态进行控制,使其在各种环境条件下保 持视轴稳定的一种技术。其基本原理是通过传感器获取光电平台的姿态信息,再 通过控制系统对平台进行相应的调整,使其始终保持稳定的视轴指向。这种技术 广泛应用于军事侦查、远程监控、科研测量等领域。
机载视轴稳定跟踪伺服系统
节的增益。 稳定回路的带宽根据对扰动功率
谱的分析 (扰动主频为 13HZ )选择为 15HZ 以上。
2. 3 系统动态设计
采用 M AT L AB控制系统工具箱对该系 统进行了动态仿真设计。采用数字校正网络。
校正后 ,稳定回路的刚度和带宽均满足给定
要求 ,刚度 Kt= 3. 15× 107g - cm /rad, 带宽
本系统用作红外制导模拟器 , 它相对于
收稿日期: 2000-09-28. 作者简介: 张秉华 ( 1936- ) ,男 ,辽宁抚顺人 , 现为嘉兴学院机电系特聘教授 ,多年从事光 电系统工程和自动控制工程研究和开发工作。 他所负责的科研项目和研究成果曾获国家科技进步特等奖、国家重大技术 装备成果一等奖、科学院科技成果二等奖和光华基金三等奖。 近年与电子科技大学合作从事自由空间通信捕获跟踪瞄准 系统的研究工作。 本系统是张教授与同事们共同研究的成果。
关键词: 视轴稳定跟踪伺服系统 ; 陀蛔稳定回路 ; 位置跟 踪回路 ; 光电成像跟踪系统。 中图分类号: T B811
Abst ract: This paper pr esent s the co nstructio n, the w o rking principle, the desig n, and the perfo rma nce o f the hig hly - dev elo ped airbo rne LO S sta bility tracking serv eo sy stem with the infr ared imag ing CCD ar ray senso r , and th en, by show ing the functio n a nd the test results,
一种用于航母自动着舰的视觉伺服技术

一种用于航母自动着舰的视觉伺服技术航母自动着舰是一项十分复杂的任务,需要高度精确的控制和无时无刻的监控。
视觉伺服技术是一种基于计算机视觉的自动控制技术,提供了有效的解决方案。
本文将介绍一种用于航母自动着舰的视觉伺服技术。
首先,本技术使用摄像头和激光雷达等设备来获取舰岛内和飞机外部的图像信息。
基于这些数据,视觉伺服系统计算出飞机的位置、速度和方向等关键参数,并将这些参数反馈给舰载计算机。
接下来,系统根据这些参数进行自主决策,控制舰载光学跟踪系统的角度和位置,确保目标在视线范围内。
然后,视觉伺服系统使用计算机视觉技术识别和跟踪目标。
这里,我们采用了一种称为光流跟踪的技术,它是一种基于时间连续的图像间差异来计算目标速度和位置的方法。
通过光流跟踪技术,系统可以不断地获取目标的位置和速度信息,并根据这些数据动态地调整飞行线路。
最后,本技术还使用了一种称为反演控制的方法,来保证舰载系统的稳定性和精准性。
反演控制是一种基于强化学习的自适应控制方法,为系统提供了一个智能的决策机制,使得系统可以快速地调整参数,使其更加精准地对准目标。
综上所述,视觉伺服技术是一种基于计算机视觉和自动控制的自适应技术,可以为航母自动着陆提供有效的解决方案。
无论是在海上还是在复杂的气象条件下,这种技术都能够提供高精度、高稳定性、高效率的自动着陆服务,大大提高了飞机着陆的安全性和可靠性。
在未来,这种技术还将进一步发展,使得其适用性更加广泛,成为军事、民用领域的重要技术。
相关数据是指与某一主题或事件有关的数字或统计数据。
对于任何一个领域,数据的分析都是非常重要的,它可以让我们更清楚地了解某些方面的情况,提供有效的参考依据,并指导我们制定更好的政策和决策。
以下是针对航母自动着舰的相关数据分析:一、自动着舰的安全性安全性是在海上执行飞机自动着舰任务时最重要的考虑因素之一。
有关统计数据显示,航空母舰是最危险的海上工作职能之一。
根据美国军方的数据,通过自动着陆系统实现的失误几率仅为0.3%,而传统的人工着陆几率约为2.5%。
舰载光电跟踪伺服系统的建模与仿真
指标要 求 的并 能在 技 术 上可 实 现 的 系统 参 数 . 因 此, 系统建 模 和 仿 真 使 系 统 的 分 析 和 设 计 大 为 简
引 起 光 电成 像 传 感 器 准 线 视 轴 的 抖 动 . 解 决 为
这 个 难 题 , 速 率 环 结 构 上 通 常采 用 双 速 率 环 , 在 以直 流 测 速 机 为 电机 转 速 测 量 反 馈 构 成 模 拟 速
的伺 服系统 稳 态 和动 态 特 性 , 确 定 出满 足设 计 并
恶 劣 的气 象 条 件 下 , 体 的 摇 摆 以及 风 力 矩 等 船
各种因素将会 使跟 踪转 台光 轴偏 离 瞄准 目标 ,
同时 载 体 在 方 位 、 仰 方 向上 的 角 运 动 或 振 动 俯
通 过 摩 擦 耦 合 导 致 光 电 跟 踪 转 台 的 抖 动 , 而 进
化, 可有效 降低开发 成本 , 对系统设 计具有 重要
意 义.
率 内环 , 用 陀 螺 的 “ 间 测 速 机 ” 能 组 成 数 利 空 功 字稳 定 外 环 , 速 率 稳 定 环 应 有 的 抗 摩 擦 干 扰 将
功 能 和 隔 离 舰 船 扰 动 功 能 分 开 实 现 . 有 四 个 具
舰 载 光 电跟 踪 伺服 系统 的建模 与仿 真
吴 。胡大军 , 晶 , 俊斌 , 璐 ’ 晗平 , 吴 2 黄 2黄
( .武汉 工程 大学 电气信 息 学院 , 北 武汉 4 0 0 2 1 湖 3 2 5;.海军 工程 大学兵 器工程 系, 北 武汉 4 0 3 ; 湖 3 0 3 3 .武汉 工程 大学光 电子 系统技 术研 究所 , 湖北 武汉 4 0 0 ) 3 2 5
1 伺 服 系统 的工 作 原 理 与 结构
舰载遥测设备伺服跟踪视轴稳定方法研究

舰载遥测设备伺服跟踪视轴稳定方法研究
鲍珊;姜素萍
【期刊名称】《飞行器测控学报》
【年(卷),期】2009(028)003
【摘要】论述了舰船摇摆对视轴稳定的影响,给出了由于舰船摇摆所引起的视轴附加角速度公式;分析了陀螺稳定回路的性能,给出了数学模型.所采用的视轴稳定方法,经过海上试验,船摇隔离度满足技术指标的要求.
【总页数】4页(P26-29)
【作者】鲍珊;姜素萍
【作者单位】91550,部队,辽宁大连,116023;91550,部队,辽宁大连,116023
【正文语种】中文
【中图分类】V556
【相关文献】
1.舰载光电跟踪设备视轴稳定分析 [J], 邹东明;刘栖山;陈长青;郭劲
2.舰载光电跟踪设备目标捕获方法研究 [J], 顾吉堂;闫晓珂
3.机载视轴稳定跟踪伺服系统 [J], 张秉华
4.基于船姿测量的舰载光电经纬仪视轴稳定方法研究 [J], 李哲;苏秀琴;乔永明;郝伟;陆陶
5.运动光电成像跟踪系统视轴稳定伺服控制设计研究 [J], 姬伟;李奇;许波
因版权原因,仅展示原文概要,查看原文内容请购买。
一种船用跟踪设备视轴稳定方法
收稿 日期 : 0 20 —5 2 0 — 4 1
作者 简介 : 成 文 (9O , , 林 农 安 人 , 林 1 6 一) 男 吉 长春 大 学讲 师 , 学硕 士 , 工 主要 从 事计 算 机 学 科 的 教学 和 相 关领 域 研究
维普资讯
第 4期
通 常船用 跟 踪设 备上 的平 台罗 经 、 显示 终 端 等都 以大地 坐标 系 为参 考 坐 标 系 , 跟 踪设 备 检 而 测到 的视轴 实际位 置 是 甲板 坐 标 系 中 的数 据 , 因 此, 必须 在 甲板 坐标 系 和大 地 坐 标 系 之 间进 行 转
换。
图 1 大 地 坐 标 系 与 甲板 坐 标 系
文章 编 号 :1 0 —9 9( 0 2 0 —0 2 0 0 62 3 2 0 ) 4 0 4 _ 4
一
种 船 用跟踪 设 备视轴 稳 定方 法
林 成 文 陈长 青 白文峰 。 , ,
(.长 春大 学 计 算 机 系 ,吉林 长 春 1 1 02 ; .中 国 科学 院长 春 光 学精 密 机械 与物 理 研 究 所 , 302 2 吉林 长 春 101) 3 0 2 1 0 2 3 02 3 .长春 工 业 大 学 电气 与 电子 工 程 学 院 ,吉 林 长 春
跟踪设 备 与 目标 间 的距离 。 坐标 系如 图 1 示 。 所
种方 法 , 通过 理论分 析 , 出了一 种 由于船体摇 摆 给
引起 的视轴 附加 角速 度 公 式 , 计 了能 够较 好 地 设 解决 船摇 隔 离度 问题 的伺服 控制 系统 [ 。 】 ]
l 跟踪 设 备 视 轴 指 向稳 定 方程
对于 船用跟 踪设 备 , 由于船 体受 海浪影 响 , 会 发 生周期 性摇摆 ( 摇 、 摇 、 摇 ) 从 而 使 跟 踪 横 纵 艏 , 设 备 的视轴 晃 动 , 成 图像 模 糊 , 至 丢失 目标 。 造 甚
舰载光电经纬仪预测跟踪技术研究
舰载光电经纬仪预测跟踪技术研究
张海洋;苏秀琴;郝伟;李哲
【期刊名称】《光子学报》
【年(卷),期】2008(37)9
【摘要】研究了舰载光电跟踪设备的稳定跟踪技术,提出了一种基于机动平台预测跟踪方案.利用坐标转换将前几帧合成角数据转换到大地坐标系,并利用合成角轨迹预测当前帧合成角数据,然后将预测结果转换到甲板坐标系,实现了机动平台的稳定跟踪;给出了该预测结果与在甲板坐标系直接预测结果的比对,证明该预测技术更为精确,有利于实现机动平台的稳定跟踪.
【总页数】5页(P1878-1882)
【关键词】光电经纬仪;视轴稳定;坐标系变换;合成角;脱靶量
【作者】张海洋;苏秀琴;郝伟;李哲
【作者单位】中国卫星发射测控系统部;中国科学院西安光学精密机械研究所【正文语种】中文
【中图分类】TN317.4
【相关文献】
1.舰载光电跟踪设备的目标预测算法研究 [J], 周俊鹏;陈健;李焱;董宇星;陈娟;赵岩
2.应用跟踪误差等效模型评价光电经纬仪跟踪性能 [J], 张宁;沈湘衡;杨亮
3.舰载环境下光电经纬仪的引导与实现 [J], 张兴国;韩涛;李靖
4.舰载光电经纬仪视轴稳定双速度环串级控制 [J], 郑天涯;高慧斌
5.一种基于光电经纬仪的数据预测跟踪技术 [J], 苏秀琴;郝伟;李哲
因版权原因,仅展示原文概要,查看原文内容请购买。
舰载经纬仪视轴自稳定方法研究
2 G a u t Sh o o hn s A a e yo c ne C a gh n 10 3 , hn ) . rd a co l f iee cd m f i c , h n cu 0 3 C ia e C Se 3
Ab t a t Care - s h o o i si f n e y s i s yng,O t a e ta kig p e i in o e v - sr c : rirba e t e d l e i n u e d b hp-wa i S tt r c n r sco fs r o t h h
舰 载经纬仪视轴 自稳定方法研 究
葛 兵 , 高慧 斌
(. I 长春光 学精 密机械 与 物理研 究所 , 吉林 长春 10 3 ; . 3 0 3 2 中科 院研 究生 院 , 吉林 长春 10 3 ) 3 0 3
摘 要 : 舰载经纬仪受舰体摇摆影响, 伺服系统跟踪精度下降, 隔离船摇影响, 稳定视轴是提高跟踪精度的关
离效果较好 。
关 键词 : 经纬仪 ; 轴稳 定 ; 视 坐标 变换 ; 前馈 控制
中图分 类号 : U 6 .2 6 6 1 文献标 识码 : A
S a iia i n fLoS f r c r ir b s d t e doie t b l to o z l a re . a e h o l 0 t
键 , 析几种视轴稳定方法 : 摇前馈控制 , 度陀螺反馈控制 , 分 船 速 复合 控 制 。得 出结 论 , 具 有 惯 性 导 航 系 统 的 大 型 舰 在 船 上 应 用 前 馈 控 制 是 可 行 的 , 过 坐 标 变 换 , 到 视 轴 稳 定 公 式 , 用 Sm l k设 计 了仿 真 框 图 , 真试 验 结 果 表 明 隔 通 得 并 i ui n 仿
舰载天线稳定平台伺服控制器研究
舰载天线稳定平台伺服控制器研究高翌阳;齐蓉;米月星【摘要】采用高性能32位DSP TMS320LF2812,以速率光纤陀螺和水平倾角仪为传感器,研究位置环+速度环的双闭环舰载天线稳定平台控制器;针对舰船主桅杆顶的大振动、强冲击以及长天线倒单摆式惯量负载等干扰跟踪精度因素,在速度环.设计一种PID和模糊控制的多模结构复合型控制方案;在平台上安装倒单摆式仿制天线进行实验,实验结果表明该稳定平台控制器的动、静态特性很好,稳定隔离精度小于1°.%This stabilized platform controller based on high-competence digital signal processor TMS320LF2812 adopts double closed-loops control structure, which uses rate fiber-optic gyroscope and gradienter as the sensors. An PID+fuzzy complex controller in gyro stable loop is proposed for the servo system with nonlinear property factors. Doing the experiment on the platform mounted inverted pendulum antenna. The result indicates that the proposed controller has good dynamic and static characteristics and is proved to be effective in bating carrier disturbance.【期刊名称】《计算机测量与控制》【年(卷),期】2012(020)005【总页数】3页(P1301-1302,1306)【关键词】稳定平台;伺服控制;速率陀螺;复合控制;DSP【作者】高翌阳;齐蓉;米月星【作者单位】西北工业大学自动化学院,陕西西安 710129;西北工业大学自动化学院,陕西西安 710129;西北工业大学自动化学院,陕西西安 710129【正文语种】中文【中图分类】TP383;TP2730 引言舰载通信天线立于几十米的桅杆之上,在舰船航行遇见复杂的海况时,受到波浪、海风及海流等海洋环境扰动的作用,不可避免地产生各种摇摆和振荡,将严重影响天线的通信质量[1]。
舰载跟踪设备自稳定建模坐标旋转变换顺序研究
第3 卷 第 2 l 期 2 0 年6 0 8 月
长 春 理 工 大 学学 报 ( 自然 科 学版 )
Junl f hn cu i ri f c n e n el lg { trl cec dt n) orao C aghnUnv syo Si c d c oy Na a i e io e t e a T mo u S n E i
摘
要:在应 用转换矩阵表 示空间直 角坐标系旋转过程的基础上 ,深入分析 了直角坐标旋转 变换的 内在机理。针对
当前舰 载跟 踪 设 备 进 行 自 定建 模 时 只 采 用 一种 坐标 旋 转 变换 顺序 的现 状 ,提 出 了采 用其 它 变换 顺序 的 问题 ,并重 稳 点 解 决 了绕 空 间任 意 直 线作 坐标 旋 转 的 难题 。分 析 结 果表 明 空 间 目标在 船 体 摇摆 后 的 甲板 坐标 系 内的位 置 坐标仅 与
Tr c rFi d Die ty o heDe k a ke xe r c l n t c
XUE tng 一, U n x a , Le a LI Ti g i CHEN a To
t . hn c u l i t o p i Fi ca i n h s s te h ee cd m cecs C ag h n10 3 ; C a gh nbs t e fO t s, n Meh nc a dP yi ,h i s a e yo ine , h n cu 3 0 3 1 tu c e s c C n A fS
S ud n t o di t sCic t y o heCo r na e r um g r tng a wic i y a i nd S t h ng
S q e c i h s l-t b l a i n M o ei g f r e u n e n t eS e fs a i z to d l o i n
舰载机光电着舰系统视轴稳定技术的研究
/ \ 厂 \ / ’ } \ f \ l £ ….. … 。 … … . 。 ,… … ~ . 。 . … … …. … . … L 厶… 。 … . …。 …… 。 … …. … 上 . 。
. 。 ¨
术。 0 1 ( ) 5 4 2 0 . : - 8. 7 4
频船摇扰动 隔离效果 更好 , 但设 计与调试 的技术难度 大【 4 ] 。 本论文采用 以编码器测速组成了速度 内环 , 陀螺反馈作为速度
稳定外环 组成双速度环稳定控制的方法 。 内环包含了驱 动电机及负
载平台 , 主要作用是克服控制对象非线性和摩擦力矩对 跟踪精度 的
影 响 ; 速 度 稳 定 外 环 中 , 率 陀螺 测量 出框 架 相对 于 惯 性 空 间 的 在 速 对 抗 干 扰 性 能 的分 析 , 明 此控 制方 法 有 效可 行 , 以提 高 系 统 的 表 可 转速 , 主要用于敏感 载体扰动 , 通过伺服控 制实现视轴稳定 , 这样的 隔离 度 。 控制方法把抗摩擦力 矩干 扰功 能和 隔离 载体干扰功能采用分层 设 参 考 文 献 计。
的干扰信号 如 图5 所示 , 为三种控制方法 对干扰 的输出响应 曲 图6
1 9 .64 :-11. 45 () 9 8
里也可 能是数 百、 千公里) 更是涉及 到视 频数 据压 缩和信道 传输控 上 接第 13 0 页 本文提 出的利用AD 1实现 的模块 只是一个较简单 的 制 的课题 。 动 目标进入视场后 , 如何快速锁定 并提取 目标 轮廓 。 智能分析 出进 系统 , 信道 方面的控 制如 缓存 控制 、 对 误码恢复等都有许多不成 熟
… …
入的是小 动物还是恶意入侵 , 及时控制系统采取相应的动作是很关 和不完善的地方, 更成熟、 高效的模块的开发也是下一步要考虑的。 键 的 , 是 这 首 先 可 能 需 要 一 些 先 验 的模 型 。 但 目前 解 决 这 个 问题 最 参 考 文 献 有效 的方法应该 是数 字图像处理技术 , 因为其 中的 目标检 测、 边缘 [ ] 富强, 建 生 等 . 1刘 钱 多媒 体 图象 技 术及 应用 [ ]北 京 : 民 邮 电 出 H. 人 提取 、 运动估计和运动补偿都有 比较成熟 的技术 或算法 。 不过 由于 版 社 。008 — 0 20 ,8 9 . 以上的算法和实现技术大部分都需要有很大的计算量 , 这对实 时陛 [ ] 富强。 2刘 卢赤班. 字视 频监 控系统及其应用[ ] 工矿 自动化, 数 J. 是个考验 。 尤其在做运动估计提取运动矢量 时, 如果算法的效率不 20 .. 0 3 3 高 的话 , 用这种运动估计得 出的结果去控制 电动 云台 , 如不能有效 [] 3 路林 吉, 吕新荣. 字图像监控技术讲 座( 1 数 第 讲概述) ]电子技 [ . J 跟 踪 或 者 对 焦 , 摄 取 和 录 像 的结 果 是 可想 而知 的 。 这 方 面 的 功 其 在 能完善 是这个系统 今后性能优化 的主要 的着眼点 。 另外 , 将系统监控到的 图像 实时清晰地传送判远处( 能几 公 可
舰载光电跟踪伺服系统的建模与仿真
舰载光电跟踪伺服系统的建模与仿真吴晗平;胡大军;吴晶;黄俊斌;黄璐【摘要】The ship - borne optoelectronic tracking servo - system using multi - loop serial composite control, on the basis of a typical three - loop control, the gyro stabilized loop is added to meet the requirements of the isolated ship shake,but it makes the loop design more complex. Multi - loop of servo system was modeled, and then the correction devices of current loop and velocity loop were designed. The system was simulated and analyzed by the use of computer simulation technology. The simulation results show the correctness of the established model, which is an effective simulation platform for the design of actual system parameters and the feasibility validation of advanced control algorithms.%舰载光电跟踪伺服系统采用多闭环串级复合控制,其在典型的三环控制基础上,加入陀螺稳定环,来满足隔离船摇的要求,但这使得环路设计较复杂.针对该问题,在建立主要部件数学模型的基础上,对伺服系统的各个环路进行建模,并对电流环、速率环的校正装置进行设计,借助计算机仿真技术对系统进行仿真分析.仿真结果表明所建模型的正确性,并且所建模型可为实际系统参数设计以及先进控制算法可行性验证提供一个有效的仿真平台.【期刊名称】《武汉工程大学学报》【年(卷),期】2012(034)007【总页数】7页(P54-60)【关键词】伺服系统;伺服回路;陀螺稳定环;建模;仿真【作者】吴晗平;胡大军;吴晶;黄俊斌;黄璐【作者单位】武汉工程大学电气信息学院,湖北武汉430205;海军工程大学兵器工程系,湖北武汉430033;武汉工程大学光电子系统技术研究所,湖北武汉430205;武汉工程大学电气信息学院,湖北武汉430205;武汉工程大学光电子系统技术研究所,湖北武汉430205;海军工程大学兵器工程系,湖北武汉430033;武汉工程大学光电子系统技术研究所,湖北武汉430205;海军工程大学兵器工程系,湖北武汉430033;武汉工程大学电气信息学院,湖北武汉430205;武汉工程大学光电子系统技术研究所,湖北武汉430205【正文语种】中文【中图分类】TP2730 引言光电跟踪伺服系统作为舰载光电跟踪设备的重要组成部分,其设计好坏直接影响设备的性能.针对被跟踪的目标速度更快、机动性更强等情况的出现,对伺服系统响应特性、跟踪精度等性能指标也提出了更高的要求[1].在设计高性能的舰载光电跟踪伺服系统时,对系统进行建模和仿真是非常重要的环节,它可以提前发现设计中的原则性错误,验证设计是否合理.在选定光电跟踪伺服系统控制结构基础上,依据选择的关键元、部器件主要参数及初步选定的系统参数建立伺服系统的数学模型,借助MATLAB软件来仿真分析所设计的伺服系统稳态和动态特性,并确定出满足设计指标要求的并能在技术上可实现的系统参数.因此,系统建模和仿真使系统的分析和设计大为简化,可有效降低开发成本,对系统设计具有重要意义.1 伺服系统的工作原理与结构舰载光电跟踪伺服系统是一个位置跟随系统,具有方位和俯仰两套独立的系统.其主要接受图像处理计算机、主控计算机、陀螺仪、旋转变压器等部件的指令、状态和误差信号,然后经过数字信号处理器(Digital Signal Processor, DSP)进行综合处理,获得驱动伺服转台电机转动的控制电压来完成对转台的操作和控制,从而实现光电跟踪设备视轴的稳定和对目标的准确跟踪.为了满足伺服系统具有快速响应特性、高跟踪精度和可靠性控制等要求,控制系统一般采用多闭环的串级复合控制结构,由电流环、速率环和位置环三个回路组成[2-4].运动载体上的伺服系统要受到舰船摇摆的影响,尤其是在恶劣的气象条件下,船体的摇摆以及风力矩等各种因素将会使跟踪转台光轴偏离瞄准目标,同时载体在方位、俯仰方向上的角运动或振动通过摩擦耦合导致光电跟踪转台的抖动,进而引起光电成像传感器准线视轴的抖动.为解决这个难题,在速率环结构上通常采用双速率环,以直流测速机为电机转速测量反馈构成模拟速率内环,利用陀螺的“空间测速机”功能组成数字稳定外环,将速率稳定环应有的抗摩擦干扰功能和隔离舰船扰动功能分开实现.具有四个回路的舰载光电跟踪伺服系统控制结构框图如图1所示.图1 伺服系统控制结构框图Fig.1 Block diagram of servo system control图1中,ω为电机输出的角速率,ωf为摩擦干扰力矩折算到电机轴上的角速率,ωs为舰船扰动引起的转台角速率,ωL为转台角速率,s为拉普拉斯变换复变量.2 伺服系统主要部件的数学模型2.1 直流力矩电机数学模型为了分析研究的方便,直流力矩电机电枢回路的等效电路图如图2所示.图2 直流力矩电机的等效电路Fig.2 Equivalent circuit of the direct-current torque motor由基尔霍夫电压定律和转矩平衡方程可将直流电动机的动态特性描述为:(1)式中,Ua为电枢电压;Ia为电枢电流;R为电枢电路总电阻;L为电枢电路总电感;E为感应电动势;KB为感应电动势常数;ω为电动机转动角速度;Tem为电动机电磁转矩;J为折算到直流力矩电机轴上的转动惯量;Td为负载转矩;KT为电动机转矩系数.设初始条件为零,将方程组式(1)拉氏变换(其中s为复变量)后可得:(2)消去中间变量E(s),可以得到电机的电枢回路模型:(3)消去中间变量Tem(s),可以得到控制电流与输出转速之间的模型:(4)由式(3)和式(4)推导可得电机模型方框图,如图3所示.图3 电机模型方框图Fig.3 Block diagram of motor model当力矩为零时,系统以电枢电压Ua(s)为输入变量、电动机角速度ω(s)为输出变量,直流力矩电机的传递函数为:(5)令电气时间常数Te=L/R,机电时间常数代入式(5)得:根据所选某型电机的参数可知:电动势常数KB=4.41V/(rad/s),电动机转矩系数KT=0.245(kg·m)/A,电气时间常数Te=0.005 s,机电时间常数Tm=13 s,将以上参数代入式(6)可得方位力矩电机加负载的传递函数为:2.2 脉宽调制功率放大器模型[5]脉宽调制(Pulse Width Modulation ,以下简称:PWM)放大器可以看作是一个滞后的放大环节.由其工作原理可知,当控制电路的输出电压U改变时,PWM功率放大器的输出电压并没有立即改变,而是需要等到下一个周期才改变,其传递函数可以写成:GPWM(s)=KPWMe-TPWMS.当开关频率比较高,即TPWM较小,并且系统截止频率满足ωc≤1/(3TPWM)时,滞后环节可近似为一阶惯性环节,传递函数可以简化为:(7)式中KPWM为脉宽调制器和PWM变换器放大系数;TPWM为开关周期.工程实际中,由于TPWM较小,数量级一般为10-4秒,可忽略不计,因此可以把它作为比例环节:Ud=KPWMU .(8)本系统中控制信号提供给PWM功率放大器的电压最大值为10 V,而PWM功率放大器要输出最高值为60 V的电压提供给直流力矩电机,所以KPWM=6.2.3 系统中测速电机、测角装置的数学模型测速电机的响应都可以认为是瞬时的,因此它的放大系数也就是它的传递函数,即:所选择模型测速机的参数Kv=0.3 V/(r/min)=2.867 V/(rad/s)跟踪式旋变/数字变换器(Resolver/Digital,R/D)模块的转换速度非常快(一般都是微秒级),因而其响应也可以认为是瞬时的,其比例系数为1,旋转变压器的传递函数KB=1.2.4 压电速率陀螺数学模型系统采用压电速率陀螺,在平衡作用于稳定转台上的干扰力矩过程中,陀螺力矩不起作用,它只起角速度测量敏感元件的作用,消除干扰力矩作用是全部通过直流力矩电机来实现的.压电速率陀螺将扰动力矩成正比的转换成电压信号.因此,可以将其看成一个比例环节:Gg(s)=kg,(10)比例系数kg由前级放大电路系数k和陀螺比例因子共同决定,由某厂提供的技术资料可知,kg=k×0.098=0.1 (V/°/s).2.5 电流反馈环节数学模型电流环中使用精度很高的电阻对电流采样,由于脉宽调制型功率放大器输出的电压信号是高频脉冲,所以电枢电流Ia也含有高频分量,可采用低通滤波器将其滤除.本系统采用模拟1阶巴特沃斯滤波器,其中采样电阻的阻值取为1 Ω,低通滤波器的通带下限频率设为10 000 rad/s,所以电流反馈滤波环节的传递函数(11)电流反馈可认为是一个比例环节,取功率放大器的最大工作电流为12 A,则电流的反馈系数β=0.83 V/A3 环路建模与仿真3.1 电流环路建模仿真作为速度内环的电流环可以使电枢电流严格跟随电压指令的变化从而准确控制电机输出的力矩,并且能够有效抑制电子噪声、反电动势等干扰量的影响,从而使测速机速度闭环的稳定精度提高.电流闭环回路由电流调节器、PWM功率放大电路、惯性环节(1/R)/(Tes+1)、电流反馈滤波环节和给定滤波环节组成,其动态结构图如图4所示.图4 电流环动态结构图Fig.4 Dynamic structure diagram of current loop由于电流环要求超调量小并以跟随性能为主,所以将其校正为典型I型系统即可满足要求.电流环的控制对象含有两个惯性环节,通过PI型调节器可将电流环校正成典型I型系统,调节器传递函数GACR(s)为(12)式中,Ki为调节器比例系数;τi为调节器超前时间常数.系统Te=0.005 s,R=4 Ω,根据2.5节可知滤波时间常数Toi=0.000 1 s.一般通过消除掉惯性较大的电机电磁特性环节来提高系统的快速性,即取电流调节器的超前时间常数τi=Te=0.005 s.将参数代入到图4,得到动态结构图(含实参)如图5所示.图5 电流环动态结构图(含实参)Fig.5 Dynamic structure diagram of current loop(with actual parameters)在一般情况下,系统的电磁时间常数远小于机电时间常数,相对电流环来说,反电动势变化较慢,可以认为其基本不变,把给定的滤波和反馈滤波两个环节都等效地移到环内,经过简化和近似处理后得到电流环简化图如图6所示.图6 电流环简化图Fig.6 Simplified diagram of current loop按工程最佳参数来选择调节器参数[6],因此比例系数(13)调节器传递函数若忽略控制器及电机输出饱和的非线性因素,对系统进行线性分析,校正后的电流环开环幅频特性、闭环频率特性和单位阶跃响应曲线分别如图7、图8及图9所示.图7 电流环开环频率特性曲线Fig.7 Open-loop frequency characteristic curve of the current loop图8 电流环闭环频率特性曲线Fig.8 Closed-loop frequency characteristic curve of the current loop图9 电流环单位阶跃响应曲线Fig.9 Unit step response curve of the current loop从图7可以得出,电流环的幅值裕度为98.1 dB,相位裕度为65.6 °,开环截止频率721 Hz;从图8可知,电流环闭环的截止频率ωB≈7 020 rad/s,带宽约为1 118 Hz;从图9可以得出超调量为4.4%,上升时间为0.31 ms,调整时间约为1.2 ms.3.2 速率环建模仿真从环路的结构看,速率环处在中间,它分别是电流环的外环和位置环的内环.在光电跟踪伺服系统中,速率环对消除摩擦力矩干扰、位置伺服精度以及低速平稳性有着显著的影响.因此,速率环设计是否合理是整个伺服系统设计的关键.在速率环设计过程中,将校正后的电流环等效成一阶惯性环节,它与系统前向通道中的积分环节一起构成了速率环被控对象.由3.1节可知校正后的电流环开环传递函数作为转速环中的一个环节,它的闭环传递函数(14)当速率环开环频率特性的截止频率ωcn满足近似条件时,可忽略高次项,Gcli(s)可等效成一个惯性环节(15)速率环调节器、电流等效环节、负载转台、速率反馈环节和给定滤波环节构成了速率环回路.设速率环调节器的传递函数为GASR(s),速率环动态结构图如图10所示. 图10 速率环动态结构图Fig.10 Dynamic structure diagram of velocity loop 根据信号电平配平原则,反馈通道的放大系数为依据所用测速电机纹波情况,取转速滤波时间常数Ton=0.004 s.为使速率环在稳态时无静差和在动态时具有较好的抗扰动性能,将速率环按典型II 型系统校正.根据速率环被控对象的特点,采用PI调节器来校正,调节器传递函数为:(16)将相关参数代入到图10,则速率环的动态结构图(含实参)如图11所示.图11 速率环动态结构图(含实参)Fig.11 Dynamic structure diagram of velocity loop(with actual parameters)与电流环类似,采用相同的简化方法,首先将给定滤波和反馈滤波环节等效地移到速率环内,然后将前向通道中的小惯性环节合并近似成一个惯性环节,其时间常数T∑n=Ton+Ti=0.004 2 s,则速率环动态结构图可以简化为图12所示.图12 速率环简化图Fig.12 Simplified diagram of velocity loop速率环的开环传递函数(17)按最小谐振峰值准则选择参数[6],则有:(18)式中,中频宽h的大小由系统对动态性能指标的要求来决定.一般取h=5较好,此时系统动态性能最优.按式(18)可以确定速率环调节器的参数为:Kn=355.7,τn=0.021.调节器传递函数速率环校正后的开环幅频特性、闭环频率特性和单位阶跃响应曲线分别如图13、图14及图15所示.图13 速率环开环幅频特性曲线Fig.13 Open-loop frequency characteristic curve of the velocity loop图14 速率环闭环幅频特性曲线Fig.14 Closed-loop frequency characteristic curve of the velocity loop图15 速率环单位阶跃响应曲线Fig.15 Unit step response curve of the velocity loop从图13可以得出,速率环的幅值裕度86.2 dB,相位裕度为41.1 °,开环截止频率21 Hz;从图14可知,速率环闭环的截止频率ωB≈224 rad/s,带宽约为36 Hz;从图15可以得出超调量为37.2%,调整时间约为0.04 s.3.3 数字稳定环等效模型数字稳定环的主要作用是隔离舰船的扰动.由安装在框架上的速率陀螺作为转台相对惯性空间角速率的敏感元件,组成一个速率闭环控制回路,通过直接驱动电机来对转台整体控制,从而保持光电传感器视轴稳定.它与以直流测速机为速度反馈所构成的模拟速度内环组成双速度环.在实际工作中,由于陀螺寿命是有限的,为满足船体在摇摆情况下的隔离度要求,才使陀螺开启,数字稳定环起作用.数字稳定环的等效模型如图16所示.稳定环调节器由数字控制器通过程序来实现.图16 数字稳定环的等效模型Fig.16 Equivalent model of the digital stable loop3.4 位置环建模仿真位置环是整个光电跟踪伺服系统的最外环,用来实现对转台位置的闭环控制,从而完成对目标的精确跟踪.位置调节器通常采用常规比例-积分-微分(Proportion Integration Differentiation,以下简称:PID)控制器由数字控制器通过程序来实现.根据PID控制原理及前节中建立的电流、速率环数学模型在MATLAB的Simulink环境中建立系统常规PID的位置环仿真模型如图17所示.图17 系统常规PID的位置环仿真模型Fig.17 Simulation model of the conventional PID position loop根据齐格勒-尼科尔斯法则[7]和手动试凑法并结合仿真效果整定出常规PID控制器的初始参数:Kp=435.4,Ki=3 000,Kd=10.当系统的输入为单位阶跃信号时,其响应曲线如图18所示.图18 系统单位阶跃响应Fig.18 Unit step response of the system从图18可以看出常规PID控制器较好满足了无稳态误差的要求,但系统动态性能不是很理想,系统超调量较大,响应时间较长.可在此模型的基础上研究采用其他改进型的PID控制方法或其他先进控制算法来使系统的动态性能更佳.4 结语结合舰载跟踪伺服系统所采用的控制结构,按照由内到外的顺序,采用分级建模、分级仿真的原则,在对伺服系统主要部件建立数学模型的基础上, 对各环路分别进行了建模,并利用MATLAB 软件对系统进行了仿真分析.通过对系统建模以及仿真分析,可以完成对伺服系统的辅助设计、调试,有效缩短系统设计周期并降低实验研究成本,可验证将先进控制算法引入到舰载光电跟踪伺服系统中的可行性.参考文献:[1] 段继岗.舰载跟踪雷达二自由度数字伺服系统的设计[D].西安:西安电子科技大学,2010.[2] 吴晗平.光电系统设计基础[M] .北京:科学出版社,2010.[3] 潘高峰,周江.船载雷达伺服系统的建模与仿真[J].电子工程师,2007,33(6):7-9,14.[4] 权渭锋.雷达伺服系统建模与仿真[J]. 现代导航,2011(2):121-129.[5] 徐世东.舰载稳定平台高精度伺服控制系统的设计研究[D]. 哈尔滨:哈尔滨工程大学,2008.[6] 罗飞,郗晓田,文小玲,等.电力拖动与运动控制系统:第二版[M].北京:化学工业出版社,2007.[7] 刘金琨.先进PID控制MATLAB仿真:第二版[M].北京:电子工业出版社,2004.。
舰载机光电着舰系统视轴稳定技术的研究
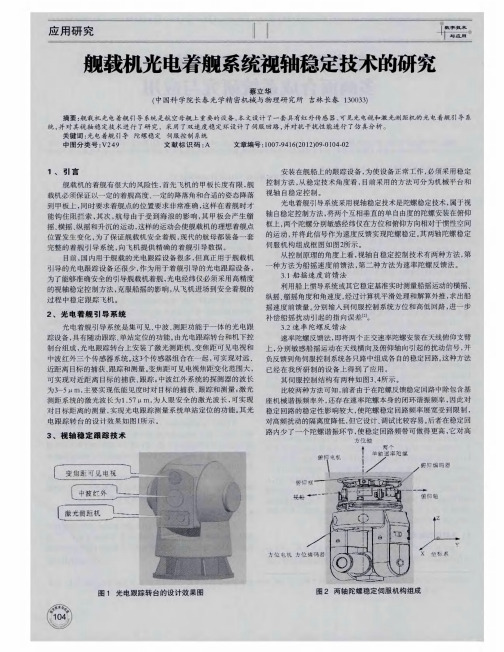
舰载机光电着舰系统视轴稳定技术的研究作者:蔡立华来源:《数字技术与应用》2012年第09期摘要:舰载机光电着舰引导系统是航空母舰上重要的设备,本文设计了一套具有红外传感器、可见光电视和激光测距机的光电着舰引导系统,并对其视轴稳定技术进行了研究,采用了双速度稳定环设计了伺服回路,并对抗干扰性能进行了仿真分析。
关键词:光电着舰引导陀螺稳定伺服控制系统中图分类号:V249 文献标识码:A 文章编号:1007-9416(2012)09-0104-021、引言舰载机的着舰有很大的风险性,首先飞机的甲板长度有限,舰载机必须保证以一定的着舰高度、一定的降落角和合适的姿态降落到甲板上,同时要求着舰点的位置要求非常准确,这样在着舰时才能钩住阻拦索,其次,航母由于受到海浪的影响,其甲板会产生艏摇、横摇、纵摇和升沉的运动,这样的运动会使舰载机的理想着舰点位置发生变化,为了保证舰载机安全着舰,现代的航母都装备一套完整的着舰引导系统,向飞机提供精确的着舰引导数据。
目前,国内用于舰载的光电跟踪设备很多,但真正用于舰载机引导的光电跟踪设备还很少,作为用于着舰引导的光电跟踪设备,为了能够准确安全的引导舰载机着舰,光电经纬仪必须采用高精度的视轴稳定控制方法,克服船摇的影响,从飞机进场到安全着舰的过程中稳定跟踪飞机。
2、光电着舰引导系统光电着舰引导系统是集可见、中波、测距功能于一体的光电跟踪设备,具有随动跟踪、单站定位的功能。
由光电跟踪转台和机下控制台组成,光电跟踪转台上安装了激光测距机、变焦距可见电视和中波红外三个传感器系统。
这3个传感器组合在一起,可实现对远、近距离目标的捕获、跟踪和测量。
变焦距可见电视焦距变化范围大,可实现对近距离目标的捕获、跟踪;中波红外系统的探测器的波长为3-5μm,主要实现低能见度时对目标的捕获、跟踪和测量;激光测距系统的激光波长为1.57μm,为人眼安全的激光波长,可实现对目标距离的测量,实现光电跟踪测量系统单站定位的功能。
舰载光电经纬仪视轴稳定精度的分析
2科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N高 新 技 术船体扰动会对光电经纬仪的性能产生影响,因此需要采取一定的措施来隔离扰动,稳定成像系统的视轴。
视轴稳定系统必须限定图像传感器的积分时间的图像抖动,越小的视轴抖动能够使允许视轴瞄准设备有更长的积分时间,从而提高了设备的探测能力。
然而,视轴稳定精度越高,则制造成本越高,因此如何合理的根据实际的系统指标要求提出视轴稳定精度指标对于整个系统的研制具有重要的意义。
目前,对于基于移动载体光电成像系统的视轴稳定技术的研究非常多,但很少有文献介绍如何提出整个系统的视轴稳定精度指标,本文通过分析视轴稳定精度对设备作用距离和成像质量影响,探讨了光电经纬仪的视轴稳定精度指标的提出依据。
1 影响视轴稳定精度的因素分析影响舰载经纬仪的视轴稳定精度的因素很多,主要包括以下几个方面。
1.1机械机构误差作为光电传感器的载体,转动框架的精度直接影响光电传感器的稳定精度,转动框架的误差主要有以下两个方面:①框架的机械误差:主要包括机械回转误差和三轴误差;②陀螺的安装误差:陀螺在安装的过程中,会产生速度轴垂直度误差和与视轴的平行度等误差,这些误差会影响陀螺的输出量,造成了控制系统的反馈量误差,降低了系统的稳定精度。
1.2陀螺信号误差视轴稳定系统的测速元件一般都为陀螺,陀螺信号存在两种主要误差:陀螺信号漂移和噪声。
这些陀螺误差会通过控制回路影响控制量,从而对视轴稳定形成不确定干扰,因此,有效的抑制陀螺的输出漂移误差和噪声是提高视轴稳定性能的关键。
1.3执行元件的误差执行元件的误差主要是由于电机的死区、力矩饱和特性、电机的输出特性的非线性等原因产生的传动系统的误差。
2 视轴稳定精度对光电经纬仪探测能力的影响光电经纬仪的探测能力即作用距离是光测设备的重要技术指标。
目标成像主要包括大气、光学系统、光学接收器件和信号处理器等几个环节,从成像的各个环节可知,影响光电经纬仪的作用距离的因素很多,主要包括光学成像系统的性能、目标的特性(包括目标大小、发光度或辐射特性)、外界环境(大气抖动、背景亮度)、接收器件等有关。
舰载稳定跟踪平台的设计与控制
舰载稳定跟踪平台的设计与控制陈立坡【摘要】本文创新性地设计了一种新型的舰载稳定跟踪平台.稳定跟踪平台采用串联双轴机构实现方位与俯仰的跟踪,采用三自由度并联机构实现纵横摇的稳定功能.本文对舰载稳定跟踪平台进行了详细的结构设计,并基于RTX实时操作系统设计了平台的稳定与跟踪控制系统.基于真实样机测量了平台的动态跟踪精度、稳定频率与动态稳定精度.实验结果证实了本文设计的稳定跟踪平台系统良好的稳定跟踪性能.【期刊名称】《火控雷达技术》【年(卷),期】2018(047)004【总页数】5页(P85-89)【关键词】舰载;稳定跟踪平台;结构设计;控制系统【作者】陈立坡【作者单位】92785部队河北秦皇岛066200【正文语种】中文【中图分类】TN95;TP271+.20 引言舰船在航行过程中,由于海浪不规则运动的影响,会有某一频率和幅值的运动[1],这种不规则运动会造成舰船上武器装备性能指标的下降,有时甚至丧失作战效能。
稳定跟踪平台[2-3]由于能够克服舰船的波动,通过高精度的传感器实时测量舰船的摇摆信息,能够精准的保证动态基准的精度,因此,在现代舰船武器系统中得到广泛的应用。
本文通过创新性的选用串并联机构的方式实现了稳定与跟踪功能。
稳定跟踪平台[4-5]主要由并联自稳转台、串联双轴跟踪转台以及控制系统组成。
串联双轴跟踪转台主要功能是方位轴、俯仰轴自动跟踪,以达到跟踪舰船目标的目的;自稳转台主要实现纵摇横摇两轴稳定的功能,为双轴跟踪转台提供稳定的基座;控制系统主要实现跟踪转台与自稳转台的运动控制,并通过借助传感检测系统与外部通讯系统,实现平台的稳定功能以及目标自动跟踪功能。
1 稳定跟踪平台结构设计舰载稳定跟踪平台由自稳转台、双轴跟踪转台、负载、电视跟踪设备、测控柜和测控系统等六大部分组成,如图1所示。
自稳转台是一个多自由度并联结构平台,用于实现纵、横摇两轴稳定的功能,主要由上平台、电动缸、球铰、下万向铰、约束分支、下平台组成,以双轴跟踪转台、用户负载和电视跟踪设备安装于上平台安装面,安装面的尺寸和安装空间可根据负载的安装要求进行确定。
舰载跟踪雷达两轴稳定伺服系统的前馈补偿法
舰载跟踪雷达两轴稳定伺服系统的前馈补偿法
郎庆文;刘年宝;王统安
【期刊名称】《上海航天》
【年(卷),期】1995(000)006
【摘要】详细介绍舰载跟踪雷达两种稳定前馈补偿方案的设计和试验。
结果表明,采用本文中的前馈技术可以极好地补偿舰的摇摆引起的误差,即使对于窄带宽的伺服系统,雷达能具有中够高的跟踪精度。
【总页数】1页(P3)
【作者】郎庆文;刘年宝;王统安
【作者单位】不详;不详
【正文语种】中文
【中图分类】TN959.72
【相关文献】
1.舰载三轴雷达波束稳定跟踪的研究 [J], 王小军;李殿璞;赵阳;余宏明;郑锦勇
2.舰载雷达两轴转台稳定方程推导 [J], 雷杰;吴彦;冯瑗瑗
3.舰载雷达三轴稳定跟踪的研究 [J], 严武升;刘宏
4.一种基于自抗扰控制技术的舰载雷达两轴稳定转台伺服系统 [J], 张杰;孙晋先;刘丽
5.基于前馈补偿的舰载雷达三轴稳定跟踪的研究 [J], 严武升;刘宏
因版权原因,仅展示原文概要,查看原文内容请购买。
舰载稳定跟踪平台的设计与控制
舰载稳定跟踪平台的设计与控制
陈立坡
【期刊名称】《火控雷达技术》
【年(卷),期】2018(047)004
【摘要】本文创新性地设计了一种新型的舰载稳定跟踪平台.稳定跟踪平台采用串联双轴机构实现方位与俯仰的跟踪,采用三自由度并联机构实现纵横摇的稳定功能.本文对舰载稳定跟踪平台进行了详细的结构设计,并基于RTX实时操作系统设计了平台的稳定与跟踪控制系统.基于真实样机测量了平台的动态跟踪精度、稳定频率与动态稳定精度.实验结果证实了本文设计的稳定跟踪平台系统良好的稳定跟踪性能.
【总页数】5页(P85-89)
【作者】陈立坡
【作者单位】92785部队河北秦皇岛066200
【正文语种】中文
【中图分类】TN95;TP271+.2
【相关文献】
1.舰载稳定平台PIDNN控制系统设计与仿真 [J], 薛航;贾培刚;何思锐;赵绍谚
2.舰载稳定跟踪平台艏摇框架结构设计与模态有限元分析 [J], 刘鹏;江雯;李越
3.轻型舰载天线双轴稳定平台伺服控制器设计研究 [J], 樊明迪;林辉
4.并联3-UPU舰载稳定平台运动控制设计与分析 [J], 李猛;黄振峰;陈俊贤;杨壮涛;
文善贤
5.基于动力学建模和液压控制的舰载雷达稳定平台设计 [J], 刘丽丽;张磊
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009年6月 飞行器测控学报Journal of Spacecraft TT&C Technology Vol.28 No.3Jun.2009
舰载遥测设备伺服跟踪视轴稳定方法研究*
鲍 珊,姜素萍
( 91550部队·辽宁大连·116023 )
摘 要:论述了舰船摇摆对视轴稳定的影响,给出了由于舰船摇摆所引起的视轴附加角速度公式;分析了陀螺稳定
(.cosθ+.ψsinθcos) (2)
其中 α和β分别是目标在甲板坐标系中的方位角
和俯仰角。
2 伺服跟踪视轴稳定方法
2.1 视轴稳定原理
2.1.1 视轴稳定的定义
视轴稳定所能达到的效果用船摇隔离度来度
量,一般用分贝数表示。船摇隔离度定义为:船摇幅
度与采取稳定措施后天线方位轴和俯仰轴摇摆量之
测量,不是铅直角)。
1.3 船摇引起的附加角速度
由船摇所引起的天线方位轴和俯仰轴上的角速
度方程[2]为
.α= (.sinθ-.ψcosφcosθ)+tanβ·
[cosα(.ψsin-.θ)-sinα·(.cosθ+.ψsinθcos)]
(1)
.β=sinα(.θ-.ψsin)-cosα·
3.1 试验条件及性能指标
动态试验海域选择在渤海,让舰载遥测设备跟
踪放在山顶的固定目标。舰以保跟踪10nm/h的速
度航行。由于摇摆,天线总是偏移目标,但伺服系统
本身的跟踪能力可使天线向对准目标的方向运动。
根据海上靶场测控需求和方案设计指标,要求
舰载遥测设备方位轴和俯仰轴的船摇隔离度均达到
回路的性能,给出了数学模型。所采用的视轴稳定方法,经过海上试验,船摇隔离度满足技术指标的要求。
关键词:视轴稳定;陀螺环;隔离度
中图分类号:V556文献标识码:A文章编号:1674-5620(2009)03-0026-04
Study on Line of Sight Stabilization of Servo System for
轴输出的误差电压。当采用视轴稳定方案时,同样
减小了舰的摇摆对天线方位轴的影响。可见,未采
用稳定方案时方位轴的最大误差电压可达到1V,而
采用视轴稳定方案后方位轴输出的误差电压最大不
超过0.5V。
图6 采用稳定方案前后方位轴误差电压
3.3 船摇隔离度分析
等运动,使设备视轴相对目标产生大的角度晃动,如
果不采取稳定措施,天线就无法跟踪目标,同时也影
响测量精度[1]。因此,测控设备的视轴稳定问题成为
海上测量的一个关键。在试验中,需要天馈系统实时
对导弹进行跟踪测量,速率陀螺实时提供舰体横摇角
度、纵摇角度、航向、航速等,伺服系统进行处理并实
时修正补偿天控器的控制信号,以一定的控制规律驱
摇相反方向的运动,保持天线在空间的指向不变。
陀螺稳定回路由3部分组成:速度回路、稳定回
路的校正放大电路及安装在天线上的速率陀螺。速
度回路与陆基设备伺服系统一样,这里作为稳定回
路中的一个环节,是一个近似非周期环节。校正放
大环节是为了使稳定回路达到预期的效果而引入的
环节。陀螺是稳定回路中的敏感元件,直接敏感船
角、纵摇角和横摇角,其符号和方向分别规定为:ψ
为航向角,舰艏艉线Oyc在水平面上的投影Oy1与
正北的夹角(自正北算起,顺时针方向为正);φ为纵
摇角,舰艏艉线(纵轴)Oyc与水平面(上的投影
Oy1)的夹角(舰首抬高为正,在垂直面内测量,为铅
直角);θ为横摇角,舰横轴Oxc与肋骨面水平线
Ox1之间的夹角,(甲板右舷下倾为正,在肋骨面内
比,即考虑了整个随动系统对船摇的隔离作用。
由于船体长、纵摇引起的艏艉升沉虽然很大,但
纵摇角度值与横摇角度值相比并不大,对舰载测控
设备跟踪影响最大的是横摇,因此需要解决的问题
主要是克服舰横向摇摆对视轴稳定的影响。
方位轴和俯仰轴的船摇隔离度gA,gE可表示
为
gA=20logθ/ΔA (3)
第一作者简介:鲍珊(1977-),女,工程师,研究生,主要从事遥测遥控方面的研究工作。第3期鲍 珊,等:某舰载遥测设备伺服跟踪视轴稳定方法研究
1.1.2 舰船甲板坐标系O-xcyczc
Oyc轴为舰船首尾线,舰首为正;Ozc轴与甲板平
面xcOyc垂直,向上为正;Oxc轴与舰船首尾线垂直,
并与其在同一平面上,右舷为正。α为甲板方位角,指
天线的目标视线在甲板平面的投影与正北的夹角,顺
时针为正;β为甲板俯仰角,指天线目标视线在甲板平
面的投影与天线目标视线的夹角,向上为正;Dc为斜
距,指天线与目标间的距离,Dc与D相等。
大地坐标系与甲板坐标系的建立如图1所示。
图1 大地坐标系与甲板坐标系
1.2 舰船姿态角及正向规定
船上平台罗经提供的船的姿态角,主要有航向
D(S) =250 1+S1.71+S0.371+S0.37
速(S)为速度回路闭环传递函数:速(S)=K速/
[1+T速(S)]=0.06/S(1+S/50)
其中 T速(S)为速度回路开环传递函数;KD/A为D/
A变换系数,12位D/A变换;KA/D为A/D变换系
数,32位A/D变换;1/i为减速箱速比:
其中 K(V/(°))为空间定向灵敏度,本系统设计
K=5V/(°)。
图5所示为采用视轴稳定方案前后俯仰轴输出
的误差电压。由图可见,未采用稳定方案时俯仰轴
的最大误差电压可达到3V,采用稳定方案后俯仰轴
输出的误差电压最大不超过1V。
图5 采用稳定方案前后俯仰轴误差电压
同样,图6所示为采用视轴稳定方案前后方位
1/i =1/450=0.0022
根据系统设计要求,β陀=4.6(V/rad/s)
方位陀螺稳定回路开环传递函数为:W(S)=
D(S)·φ速(S)·1i·β陀=K1+S1.71+S0.37
1+S0.371+S50S
其中 K=250×0.06×0.022×4.6=1.518
3 视轴稳定方法海上跟踪试验
shipborne telemetry tracking equipment. The expressions of line of sight angle-added velocity induced by ship-swa-
ying are introduced.The property of gyroscope stabilization loop is analyzed and a mathematical model is built. The
gE=20logθ/ΔE (4)
其中 θ为舰体横摇幅度。
2.1.2 视轴指向稳定方程
鉴于坐标变化及坐标反变换公式在文献[3]中
己有较为详尽的推导,此处直接引用结果。
(1)大地坐标到甲板坐标的变换
α=arctancosE[cosθsin(A-ψ)+sinθsincos(A-ψ)]-sinEsinθcoscosEcoscos(A-ψ)+sinEsin(5)
line of sight stabilization method discussed in the paper is tested on the sea. Degree of isolating is fit for the require-
ment of the design scheme.
secE为数字正割补偿。方位陀螺安装时,其敏
感轴与倾斜轴平行,当天线视轴有一个俯仰角E
时,陀螺敏感船摇在方位平面的分量会下降一个余
弦因子cosE,是回路的开环增益下降,为了使开环
增益保持不变,所以要进行正割补偿。在俯仰稳定
回路中则没有这一问题。
D(S)为陀螺稳定回路数字校正放大传递函数
Shipborne Telemetry Tracking Equipment
BAO Shan,JIANG Su-ping
(PLA Unit 91550, Dalian,Liaoning Province 116023)
Abstract:The influence of swinging ship to line of sight is discussed theoretically based on the actual situation of the
30dB以上。
3.2 跟踪试验结果
3.2.1 船摇幅度曲线
图4为海上试验横摇曲线。可见,舰载遥测设
备稳定跟踪目标时,舰摇过程实际是一个窄带随机
过程,相对于控制过程而言,其变化过程很缓慢。
图4 舰横摇幅度曲线
3.2.2 天线轴跟踪误差曲线
系统控制中,发送给伺服系统的误差信号不是
方位轴和俯仰轴的角度误差信息ΔA,ΔE,而是控制
方位轴和俯仰轴的误差电压ΔUA,ΔUE,角度误差
与误差电压之间的关系见式(9)、式(10)。利用伺服
系统的方位轴和俯仰轴输出的误差电压,分别给出
伺服系统采用稳定方案前后的误差电压曲线。
ΔA =ΔUA/K (9)
ΔE =ΔUE/K (10)
28第3期鲍 珊,等:某舰载遥测设备伺服跟踪视轴稳定方法研究
E =arcsin cosβsincosα-cossinθsinα+sinβcoscosθ(8)