调节器的PID参数整定(精)
PID参数调节原理和整定方法
P比例调节
P比例调节特点 比例调节特点
比例调节反应速度快,输出与输入同步, 比例调节反应速度快,输出与输入同步,没有时间滞 其动态特性好。 后,其动态特性好。 比例调节的结果不能使被调参数完全回到给定值, 比例调节的结果不能使被调参数完全回到给定值,而 产生余差。 产生余差。
P的一般选取范围 的一般选取范围
比例带表;值越大,作用越小,范围0-1000 % 积分时间;值越大,作用越小,范围0.1-10000s 微分时间;值越大,作用越大,范围0-10000s
实时曲线观察窗口
CS3000系统PID参数整定方法
无扰动切换
勿扰动切换:控制回路手动(MAN)到自动 (AUT)状态切换时,保证设定值(SV)与测 量值(PV)保持一致或相当。 PID控制只有在控制回路处于AUT状态,也就 是负反馈回路时才有用。
压力调节: 压力调节: 流量调节: 流量调节: 液位调节: 液位调节: 温度调节: 温度调节: 30~70% 60~300% 40~100% 40~80%
I积分调节
I:积分调节
一般用于控制系统的准确性,消除余差。 一般用于控制系统的准确性,消除余差。 对于同一偏差信号,积分常数越大, 对于同一偏差信号,积分常数越大,表示积分 调节作用越强; 调节作用越强;积分常数就表示了积分作用的 大小。 大小。 积分常数的倒数叫积分时间, 表示。 积分常数的倒数叫积分时间,用TI表示。
数的工程整定法
动态特性参数法 稳定边界法 衰减曲线法 经验法
实际生产过程中,不可能让生产工艺产生较大波 动,以上方法不通用也不实际,顾本文主要对经 验法详细介绍
PID参数的工程整定法
经验法 即先确定一个调节器的参数值P和I, 通过改变给定值对控制系统施加一个扰动, 现场观察判断控制曲线形状。若曲线不够 理想,可改变P或I,根据控制过程曲线, 经反复凑试直到控制系统符合动态过程品 质要求为止,这时的P和I就是最佳值。
PID控制器的作用分析及参数整定

PID控制器的作用分析及参数整定PID控制器是一种常用的自动控制器,可以根据系统的反馈信号和设定值进行调整,从而实现控制系统的稳定和精确控制。
PID控制器通过调整输出信号,使得被控对象的输出值尽可能地接近设定值,通过不断地迭代修正,实现对系统的自动调节和控制。
1.实现系统的稳定控制:PID控制器通过不断地调整输出信号,使得被控对象的输出值尽可能地接近设定值,从而实现系统的稳定控制。
PID 控制器的输出信号与系统的误差、误差变化率以及误差积分值有关,通过调整这些参数的权重,可以实现对系统的稳定控制。
2.快速响应和抗干扰能力:PID控制器能够根据系统的反馈信号和设定值的变化情况,快速地调整输出信号,使得系统能够快速响应,并具有一定的抗干扰能力。
通过合理地设置PID控制器的参数,可以提高系统的响应速度和抗干扰能力,实现更加准确的控制。
3.自动调节和优化:PID控制器可以根据系统的反馈信号和设定值自动调节输出信号,实现对系统的自动调节和优化。
通过不断地迭代修正,PID控制器可以根据系统的实际状况和要求,自动调整参数,使得系统的控制效果达到最佳状态。
参数整定是PID控制器应用的关键环节,合理的参数设置可以有效地提高PID控制器的性能。
常见的PID控制器参数包括比例增益(Kp)、积分时间(Ti)和微分时间(Td)。
1.比例增益(Kp):控制器输出与误差的线性关系,越大控制器对误差的修正约大。
Kp的选择会影响系统的响应速度和稳定性,过大会导致震荡或不稳定,过小则响应较慢或无法消除稳态误差。
2.积分时间(Ti):控制器对误差累积值的补偿作用,用于消除稳态误差。
Ti的选择对系统的响应速度和稳态误差的消除有影响,过大会导致响应变慢,过小则可能导致震荡。
3.微分时间(Td):控制器对误差变化率的补偿作用,用于消除超调和减小误差上升的速率。
Td的选择可以改善系统的动态响应速度和稳定性,但过大或过小可能引起震荡。
参数整定的方法较为复杂,常用的方法包括经验调整法、试探法、理论分析法和优化算法等。
PID控制器的参数整定(经验总结)
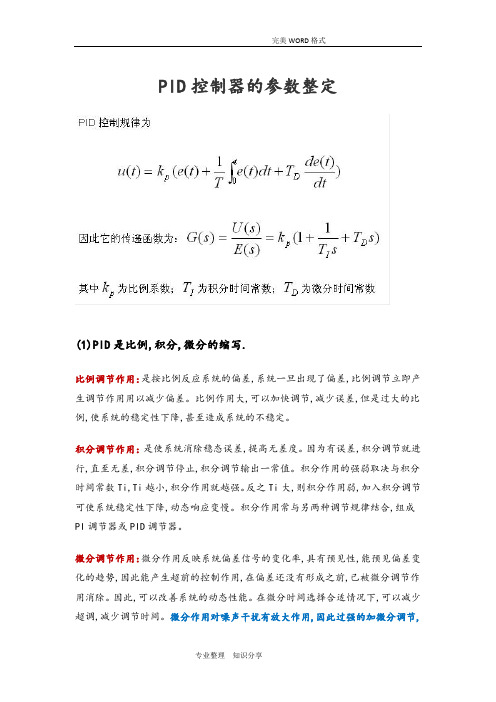
PID控制器的参数整定(1)PID是比例,积分,微分的缩写.比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
反之Ti大,则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
(2) PID具体调节方法①方法一确定控制器参数数字PID控制器控制参数的选择,可按连续-时间PID参数整定方法进行。
在选择数字PID参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。
一般来说,PI、PID和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
选择参数控制器结构确定后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
PID参数整定方法

2.3 PID参数整定方法参数整定找最佳,从小到大顺序查;先是比例后积分,最后再把微分加;曲线振荡很频繁,比例度盘要放大;曲线漂浮绕大湾,比例度盘往小扳;曲线偏离回复慢,积分时间往下降;曲线波动周期长,积分时间再加长;曲线振荡频率快,先把微分降下来;动差大来波动慢。
微分时间应加长;理想曲线两个波,前高后低4比1;一看二调多分析,调节质量不会低。
2.3.1 工程整定法PID数字调节器的参数,除了比例系数K p,积分时间T i和微分时间T d外,还有1个重要参数即采样周期T。
1.采样周期T的选择确定从理论上讲,采样频率越高,失真越小。
但是,对于控制器,由于是依靠偏差信号来进行调节计算的,当采样周期T太小,偏差信号也会过小,此时计算机将失去调节作用;若采样周期T太长,则将引起误差。
因此采样周期T必须综合考虑。
采样周期的选择方法有两种,一种是计算法,另一种是经验法。
计算法由于比较复杂,特别是被控对象各环节时间常数难以确定,工程上较少用。
经验法是一种凑试法,即根据人们在控制工作实践中积累的经验以及被控对象的特点,先选择一个采样周期T,进行试验,再反复改变T,直到满意为止。
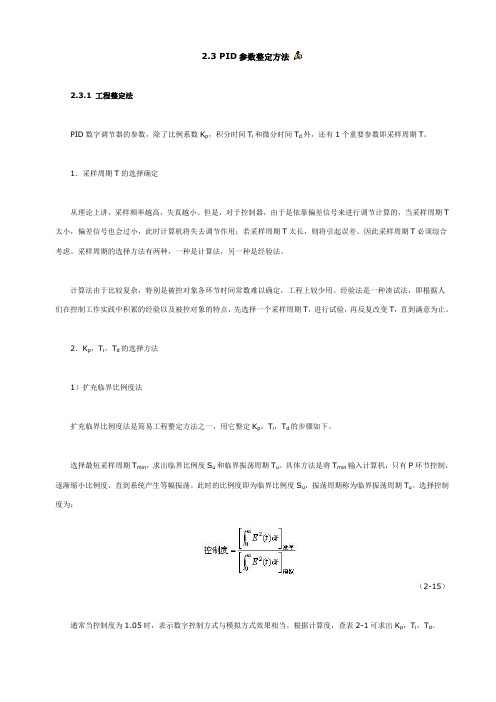
2.K p,T i,T d的选择方法1)扩充临界比例度法扩充临界比例度法是简易工程整定方法之一,用它整定K p,T i,T d的步骤如下。
选择最短采样周期T min,求出临界比例度S u和临界振荡周期T u。
具体方法是将T min输入计算机,只有P环节控制,逐渐缩小比例度,直到系统产生等幅振荡。
此时的比例度即为临界比例度S u,振荡周期称为临界振荡周期T u。
选择控制度为:(2-15)通常当控制度为1.05时,表示数字控制方式与模拟方式效果相当。
根据计算度,查表2-1可求出K p,T i,T d。
表2-1 扩充临界比例度法整定参数表2)扩充响应曲线法若已知系统的动态特性曲线,可以采用和模拟调节方法一样的响应曲线法进行整定,其步骤如下。
断开微机调节器,使系统手动工作,当系统在给定值处处于平衡后,给一阶跃输入。
PID参数调节原理和整定方法
I积分调节
比例调节和积分调节的比较: 积分调节可以消除静差。但对比例调节来说,当被调
参数突然出现较大的偏差时,调节器能立即按比例地把调 节阀的开度开得很大,但积分调节器就做不到这一点,它 需要一定的时间才能将调节阀的开度开大或减小,因此, 积分调节会使调节过程非常缓慢。总之,比例调节能及时 进行调节,积分调节可以消除静差。
反馈控制 -根据偏差进行的控制
设定值 偏差 PID调节器
阀门
被控对象
测量变送器
•PID参数调节原理和整定方法
P比例调节
P:比例调节
在P调节中,调节器的输出信号u与偏差信号e成比例, 即 u = Kc e (kc称为比例增益)
但在实际控制中习惯用增益的倒数表示 δ =1 / kc (δ称为比例带)
不同的DCS使用不同的参数作为P的调节参数,以CS3000 为例,选用δ 比例带为调节参数,单位%。可以理解为:
增大微分时间D有利于加快系统的响应速度,使 系统超调量减小,稳定性增加,但系统对扰动的 抑制能力减弱。
在凑试时,可参考以上参数对系统控制过程的影 响趋势,对参数调整实行先比例、后积分,再微 分的整定步骤。
•PID参数调节原理和整定方法
CS3000系统PID参数整定方法
串级回路PID参数调整
因为串级调节系统一般应用于容量滞后较大的 场合,必须加微分,所以主调一般取PID,而 副调一般取P就可以了。但是副参数是流量, 压力时,可加一定的I作用,这里也不是为了 消除余差,只是流量,压力付对象时间常数太 小,导致副调节器的P不能太小,调节作用弱, 加上积分是为了使副参数偏离给定值太远。
PID参数的工程整定法
动态特性参数法 稳定边界法 衰减曲线法 经验法
PID参数整定(精)
2
4 PID调节原理 动态特性参数法:
若广义被控对象的阶跃响应可用一阶惯性环节 加纯延迟来近似
G ( s) K e s Ts 1
则做实验得对象参数 K , T , 再根据Z—N调节器参数整定公式求取PID参数:
u 1 (e 1 t de edt T ) 0 D TI dt
22
4 PID调节原理
4.7.2 PID参数的工程整定方法
动态特性参数法 稳定边界法 衰减曲线法
1 u (e TI 1 de 0 edt TD dt )
t
1
4 PID调节原理 4.7.2.1 动态特性参数法 背景:1942年由齐格勒(Ziegler)和尼科 尔斯(Nichols)首先提出。 使用方法的前提是,广义被控对象的阶跃 响应可用一阶惯性环节加纯延迟来近似。
2
(4.35)
3)比例积分微分调节器
K P K 1.35( / T ) 1 0.27 TI / T [2.5( / T ) 0.5( / T ) 2 ] /{1 0.6( / T )] TD / T 0.37( / T ) /[1 0.2( / T )] (4.36)
柯恩(Cohen)-库恩(Coon)整定公式
1)比例调节器
K P K ( / T ) 1 0.333 (4.34)
2)比例积分调节器
K P K 0.9( / T ) 1 0.082 TI / T [3.33( / T ) 0.3( / T ) ] /{1 2.2( / T )]
实际确定T时应考虑的因素:
给定值的变化频率 被控对象的特性 执行机构的类型 n 控制的回路数 T Tj
PID参数整定调节方法
PID 参数如何设定调节内容:PID 参数如何设定调节PID 就是比例微积分调节,具体你可以参照自动控制课程里有详细介绍!正作用与反作用在温控里就是当正作用时是加热,反作用是制冷控制。
PID 控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时, 控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构,加到被控系统上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID 控制及其控制器或智能PID 控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID 控制器产品,各大公司均开发了具有PID 参数自整定功能的智能调节器(intelligent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID 控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet相连,如Rockwell的PLC-5等。
还有可以实现PID 控制功能的控制器,如Rockwell的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop control system是指被控对象的输出(被控制量)对控制器(con troller)的输出没有影响。
PID参数整定方法
2.3 PID参数整定方法2.3.1 工程整定法PID数字调节器的参数,除了比例系数K p,积分时间T i和微分时间T d外,还有1个重要参数即采样周期T。
1.采样周期T的选择确定从理论上讲,采样频率越高,失真越小。
但是,对于控制器,由于是依靠偏差信号来进行调节计算的,当采样周期T 太小,偏差信号也会过小,此时计算机将失去调节作用;若采样周期T太长,则将引起误差。
因此采样周期T必须综合考虑。
采样周期的选择方法有两种,一种是计算法,另一种是经验法。
计算法由于比较复杂,特别是被控对象各环节时间常数难以确定,工程上较少用。
经验法是一种凑试法,即根据人们在控制工作实践中积累的经验以及被控对象的特点,先选择一个采样周期T,进行试验,再反复改变T,直到满意为止。
2.K p,T i,T d的选择方法1)扩充临界比例度法扩充临界比例度法是简易工程整定方法之一,用它整定K p,T i,T d的步骤如下。
选择最短采样周期T min,求出临界比例度S u和临界振荡周期T u。
具体方法是将T min输入计算机,只有P环节控制,逐渐缩小比例度,直到系统产生等幅振荡。
此时的比例度即为临界比例度S u,振荡周期称为临界振荡周期T u。
选择控制度为:(2-15)通常当控制度为1.05时,表示数字控制方式与模拟方式效果相当。
根据计算度,查表2-1可求出K p,T i,T d。
表2-1 扩充临界比例度法整定参数表控制度控制规律参数T K p T i T d1.05PIPID0.03T u0.014T u0.53S u0.63S u0.88T u0.49T u/0.14T u1.2PIPID 0.05T u0.43T u0.49S u0.47S u0.91T u0.47T u/0.16T u1.5PIPID 0.14T u0.09T u0.42S u0.34S u0.99T u0.43T u/0.20Tu2.0PIPID 0.22T u0.16T u0.36S u0.27S u1.05T u0.4T u/0.22T u2)扩充响应曲线法若已知系统的动态特性曲线,可以采用和模拟调节方法一样的响应曲线法进行整定,其步骤如下。
PID调节器的调节过程及其参数的整定方法

摘要锅炉汽包水位是锅炉运行中的一个重要的监控参数,它间接反映了锅炉蒸汽负荷与给水流量之间的平衡关系。
汽包锅炉给水自动控制的任务是使锅炉的给水量适应锅炉的蒸发量,以维持汽包水位在规定的范围内。
由于给水系统的复杂性,现有的火电厂全程给水控制采用传统的PID控制,其精确数学模型难以建立,并且系统具有大滞后、时变性等一系列特点,往往难以满足火电机组复杂工况要求,所以许多大型火电厂对现有的全程给水控制提出了优化方案。
本文首先对控制系统进行时域分析,然后介绍PID调节器的调节过程及其参数的整定方法。
重点分析了锅炉的给水控制系统,针对汽包水位控制对象的动态特性表现为有惯性、无自平衡能力的特点,采用先进的智能控制算法之一的模糊控制对其进行控制,并利用MATLAB分别对常规PID控制和模糊PID 串级控制进行仿真,结果表明采用模糊PID串级控制方法比常规PID控制方法迟延小、超调量小,使得汽包的动态特性得到优化。
关键词:模糊控制;给水控制;PID控制AbstractThe steam drum water level of boil is important monitoring parameter in a boiler movement, it had reflected indirectly the balance relations between the boiler steam load and the discharge of water. In the steam drum boiler for the water automatic control duty to adapt the boiler transpiration rate for the water volume, maintains the steam drum water level in the stipulation scope. As a result of for the water system complexity, the existing thermoelectric power station entire journey for the water control adopt the traditional PID control, its precise mathematical model establishes with difficulty, when the system has the big lag, denatured and so on a series of characteristics, often with difficulty satisfies the thermal power unit complex operating mode request, therefore many large-scale thermoelectric power stations proposed the optimization plan to the existing entire journey for the water control.First this article has analyzed the time domain of control system, then introduces the PID regulator’s adjustment process and the parameter installation method. And has analyzed great emphasis on the boil for the water control system, the steam drum water control object show the inertia, the non-self regulation ability, uses of a fuzzy control to control it, and separately carries on the simulation using MATLAB to the tradition PID control and the fuzzy PID cascade control, With comparing using the fuzzy PID cascade control method obtain result that is delay slightly, over small, enables the steam drum the dynamic characteristic to obtain the optimization.Keywords: Fuzzy control; For the water control; PID control目录引言 (1)第一章控制系统的时域性能分析 (2)1.1 一阶系统的时域响应分析 (2)1.2 二阶系统的时域响应分析 (3)1.3 高阶系统的时域响应分析 (6)第二章PID控制及其调节过程 (9)2.1 比例调节(P调节) (9)2.2 积分调节(I调节) (10)2.3 比例积分调节(PI调节) (11)2.4 比例积分微分调节(PID调节) (13)第三章PID的整定方法 (18)3.1 齐格勒-尼柯尔斯法则 (18)3.2 广义频率法 (20)3.3 工程整定法 (26)第四章锅炉给水控制系统分析 (33)4.1 给水控制的任务 (33)4.2 给水控制对象的动态特性 (33)4.2.1 给水流量扰动下水位的动态特性 (34)4.2.2 蒸汽流量扰动下的水位的动态特性 (35)4.2.3 炉膛热负荷扰动下水位控制对象的动态特性 (36)4.3 给水自动控制系统 (36)4.3.1 单级三冲量给水控制系统 (37)4.3.2 串级三冲量给水控制系统 (41)4.4 给水全程控制系统 (45)4.4.1 全程控制的概念 (45)4.4.2 对给水全程控制系统的要求 (45)4.4.3 单元制锅炉给水全程控制方案 (46)4.5 300MW单元机组给水全程控制系统实例 (48)4.5.1 给水热力系统简介 (48)4.5.2 给水全程控制系统原理 (48)第五章模糊控制理论及系统 (53)5.1 模糊控制理论的发展 (53)5.2 模糊控制系统的原理 (53)5.3 模糊控制器的分类 (55)5.4 模糊控制器的设计 (56)5.4.1 模糊控制器的输入输出变量 (57)5.4.2 模糊控制规则的设计 (57)5.4.3 确立模糊化和非模糊化方法 (58)5.4.4 采样时间的选择 (59)第六章系统仿真 (60)6.1 PID系统仿真 (60)6.2 模糊自适应PID控制系统仿真 (61)6.3 两种控制方法的比较 (64)结论 (65)参考文献 (66)附录 (67)谢辞 (74)引言火电站的热工控制技术水平随着火电机组单机容量的增加和控制仪表的进步而达到崭新的水平。
PID参数整定调节方法

PID参数如何设定调节内容:PID参数如何设定调节PID就是比例微积分调节,具体你可以参照自动控制课程里有详细介绍!正作用与反作用在温控里就是当正作用时是加热,反作用是制冷控制。
PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet相连,如Rockwell的PLC-5等。
还有可以实现PID 控制功能的控制器,如Rockwell 的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
PID控制器参数整定口诀(精)

PID控制器参数整定的方法很多,概括起来有两大类
一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制器参数。
这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
现在一般采用的是临界比例法。
利用该方法进行PID控制器参数的整定步骤如下:(1首先预选择一个足够短的采样周期让系统工作;(2仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3在一定的控制度下通过公式计算得到PID控制器的参数。
PID参数的设定:是靠经验及工艺的熟悉,参考测量值跟踪与设定值曲线,从而调整P\I\D的大小。
PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T: P=20~60%,T=180~600s,D=3-180s
压力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60so
常用口诀:
参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很
频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加长曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1 一看二调多分析,调节质量不会低。
PID控制原理及参数整定方法
PID控制原理及参数整定方法PID控制是一种经典的控制策略,广泛应用于各种工业自动化系统。
其通过比较设定值与实际输出值,根据误差及其变化趋势,实时调整控制器的参数,以达到期望的控制效果。
本文将详细介绍PID控制原理及参数整定方法,旨在帮助读者更好地理解和应用PID控制。
PID控制模型是由比例(P)、积分(I)和微分(D)三个环节组成的。
在工业自动化中,PID控制器作为一种核心组件,用于维持系统输出值与设定值之间的误差为最小。
PID控制器具有结构简单、稳定性好、易于实现等优点,因此被广泛应用于各种工业控制系统中。
PID控制原理基于控制系统的稳态误差,通过比例、积分和微分三个环节的作用,达到减小误差的目的。
比例环节根据误差信号的大小,产生相应的控制输出;积分环节根据误差信号的变化率,进一步调整控制输出;微分环节则根据误差信号的变化趋势,提前进行控制调整,以迅速消除误差。
PID参数整定的目的是选择合适的控制器参数,以满足系统的动态性能和稳态性能要求。
整定过程中,需要合理调整比例系数、积分时间和微分增益等参数。
其中,比例系数主要影响系统的稳态误差;积分时间用于控制积分环节的灵敏度;微分增益则决定了微分环节的作用强度。
针对不同的控制对象和系统要求,需要灵活调整这些参数,以获得最佳的控制效果。
以某化工生产线的液位控制为例,说明PID控制原理及参数整定的应用。
在此案例中,液位控制器通过比较设定值与实际液位值的误差,实时调整进料泵的转速,以维持液位稳定。
选择一个合适的比例系数Kp,使得系统具有较快的响应速度;调整积分时间Ti,以避免系统出现稳态误差;适当微分增益Kd的设定,可以改善系统的动态性能。
通过合理的参数整定,液位控制系统可以取得良好的控制效果。
然而,若比例系数过大,系统可能会出现振荡现象;若积分时间过长,系统可能无法达到预期的稳态性能;若微分增益过强,系统可能会对噪声产生过度反应。
因此,在参数整定过程中,需要根据实际情况进行反复调整,以达到最佳的控制效果。
PID参数调节原理和整定方法
实时曲线观察窗口
CS3000系统PID参数整定方法
无扰动切换பைடு நூலகம்
勿扰动切换:控制回路手动(MAN)到自动 (AUT)状态切换时,保证设定值(SV)与测 量值(PV)保持一致或相当。 PID控制只有在控制回路处于AUT状态,也就 是负反馈回路时才有用。
CS3000系统PID参数整定方法
改变模式
手动
自动
串级
CS3000 调整窗口
进行PID参数调节时,建议按下保留按钮 ,以方便在切换画面后观察保留的趋势 ,PID参数调整完后必须取消。 要进行PID参数调节,首先必须要有权限 。显示“=”表示可以进行参数修改,显 示“:”表示不能对参数进行修改。默 认值班长有权限修改。
比例带表;值越大,作用越小,范围0-1000 % 积分时间;值越大,作用越小,范围0.1-10000s 微分时间;值越大,作用越大,范围0-10000s
CS3000系统常用PID参数
P (%) 20~60 30~70 20~80 40~100 I D (s) (s) 180~600 3~180 24~180 60~300 6~60
温度 压力 液位 流量
IA 系统PID参数整定
要进行PID参数调节,首先必须要有权限 ,默认情况下值班长有权限修改。
CS3000系统PID参数整定方法
串级回路PID参数调整
因为串级调节系统一般应用于容量滞后较大的 场合,必须加微分,所以主调一般取PID,而 副调一般取P就可以了。但是副参数是流量, 压力时,可加一定的I作用,这里也不是为了 消除余差,只是流量,压力付对象时间常数太 小,导致副调节器的P不能太小,调节作用弱, 加上积分是为了使副参数偏离给定值太远。
PID参数的整定

PID参数的含义: 比例系数P:增大比例系数P一般将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。
积分时间Ti:增大积分时间Ti有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。
微分时间Td:增大微分时间Td有利于加快系统的响应速度,使系统超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。
PID参数整定:1.在凑试时,可参考以上参数对系统控制过程的影响趋势,对参数调整实行先比例、后积分,再微分的整定步骤;2.首先整定比例部分。
将比例参数由小变大,并观察相应的系统响应,直至得到反应快、超调小的响应曲线;3.如果系统没有静差或静差已经小到允许范围内,并且对响应曲线已经满意,则只需要比例调节器即可;4.如果在比例调节的基础上系统的静差不能满足设计要求,则必须加入积分环节。
在整定时先将积分时间设定到一个比较大的值,然后将已经调节好的比例系数略为缩小(一般缩小为原值的0.8),然后减小积分时间,使得系统在保持良好动态性能的情况下,静差得到消除。
在此过程中,可根据系统的响应曲线的好坏反复改变比例系数和积分时间,以期得到满意的控制过程和整定参数;5.如果在上述调整过程中对系统的动态过程反复调整还不能得到满意的结果,则可以加入微分环节。
首先把微分时间D设置为0,在上述基础上逐渐增加微分时间,同时相应的改变比例系数和积分时间,逐步凑试,直至得到满意的调节效果。
PID参数整定方法就是确定调节器的比例带PB、积分时间Ti和和微分时间Td。
一般可以通过理论计算来确定,但误差太大。
目前,应用最多的还是工程整定法:如经验法、衰减曲线法、临界比例带法和反应曲线法。
各种方法的大体过程如下:(1)经验法又叫现场凑试法,即先确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加一个扰动,现场观察判断控制曲线形状。
若曲线不够理想,可改变PB或Ti,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
调节器的PID参数整定
临界比例带法
临界比例带法,是过去应用较广的一种整定参数的方法,它的特点是,可以不需要求得被控制对象的特性,而直接的闭合的控制系统中进行整定。
如果一个自动控制系统,在外界干扰作用后,不能回复到稳定的平衡状态,也不发散,而是产生一种等幅的震荡,这样的控制过程,称为临界震荡过程,如图所示,图中TK是被控参数,Y的临界周期TK,被控参数处于临界震荡过程时,调节器的比例带称为临界比例带PK。
临界比例带法整定调节器参数是在纯比例作用下,在闭合控制系统中,从大到小逐步改变调节器的比例带P(%),以便得到上述的临界震荡过程,然后,确定临界比例带PK和临界周期TK的数值,根据表4-1所例的经验公式,计算出各类调节器相应的各个特性参数值。
具体步骤如下
①.先通过手动操作器,使工艺状态稳定一段时间。
②.调节器除比例作用外,其他的控制都切除(积分时间,放在最
大。
微分时间放在零处)
3.改变调节器的比例带,先是逐步减小调节器的比例带,细心观察输出电流和控制过程的变化情况,如果控制过程是衰减的,则把比例带连续放小,如果控制过程是发散的,则把比例带放大,直接持续4-5次等幅震荡为止,此时的比例带就是临界比例带pk,来回震荡一次的时间,亦即从震荡的一个顶点到相邻同期的第一个顶点所需要的时间(分)就是临界周期Tk。
4.有3pk和Tk,就可以根据表4-1的经验公式,求得各类调节器的各
个参数p。
. Td值。
5,求得具体数值后,先把比例带放在比计算值大一些的数值上,然后把积分时间放到求得的数值上,如果需要,再放上微分的时间,最后把比例减少到计算值上。
二.衰减曲线法
衰减曲线法是在总结临界比例带法和其它一些方法的基础上,经过反复实验后提出来的,这种方法,不需要进行大量的凑式,也不需要得到临界震荡过程,而直接求得调节器的比例带,这种方法有两种,一种是4:1衰减曲线法,一直是10:1衰减曲线法,下面着重介绍4:1衰减曲线法。
大家都知道纯比例作用下的一个自动控制系统,在比例带逐步减少的过程中就会出现如图4-25所示的控制过程,这时控制过程的比例带称为4:1衰减比例带Ps,两个相邻波峰之间的时间称为为4:1衰减TS,4:1衰减曲线法,就是要在纯比例作用下的闭合控制系统中求得Ps。
TS,从而计算出来P。
T及Td,具体整定步骤如下。
1.熟悉感应卡、工艺流程,了解操作指标,掌握控制系统的组成。
2.把积分时间放到最大,微分时间放到零,待控制系统稳定后,逐
步减少比例带,观察输出电流和控制过程的波动情况,直到出现4:1的衰减过程为止,记下4:1的衰减比例带Ps和操作周期TS 3.根据Ps和TS按照表4-2所列的经验公式,求得各类调节器的相
应参数的具体数值。
4.先把比例带放到一个比计算值大一点的数值上,然后放上积分时
间再慢慢地放上微粉时间,最后把比例带减少到计算值上,观察控制过程,如发现记录曲线不理想,可以进行少量调整。
表4-2
采用衰减曲线法必须注意两点。
1.所加给定扰不能太大,要根据生产操作要求来定,一般在5%左右
也有例外的情况。
2.对于反应快的系统,如流量管道压力和小容量的液面调节等,要
在记录纸上严格得到4:1衰减曲线较困难,一般以被控制参数来回波动两次达到稳定就近似也认为得达到4;1衰减过程了。
四.经验凑式法
整定参数寻最佳从小到大顺次查
先是比例后积分最后再把微分加
曲线震荡很频繁比例度盘要放大
曲线漂浮绕大弯比例度盘往小搬
曲线偏离回复慢积分时间往下降
曲线波动周期长积分时间再加长
理想曲线两个波调节过程高质量
表4-3所列参数为经验法,提供了基本的凑法范围,但是应当指出有些特殊的系统会超出这样的范围,例如,稳定系统的积分时间有时长达15分钟,流量系统的比例可达200%以上。
表4-3。