编写一个名为DDK_HelloWorld简单的驱动
1.3.2为DDK_HelloWorld添加卸载驱动例程-(10课)
1.3.2为DDK_HelloWorld添加卸载驱动例程-(10课)1.3.2为DDK_HelloWorld添加卸载驱动例程 (10课)A、输出调试信息-KdPrintB、认识PDRIVER_OBJECT结构C、注册驱动卸载例程D、卸载例程回调函数构建E、查看驱动调试信息课时22:12===============教案内容====================1、VC环境新建一个项目工程#define INITCODE code_seg("INIT") //入口函数一般需要放在INIT标志的内存中,INIT标志指明该函数只是在加载的时候需要载入内存,而当驱动成功加载后,该函数可以从内存中卸载掉#define PAGEDCODE code_seg("PAGE") //讲的过程中漏了这点不好意思VOID DDK_Unload (IN PDRIVER_OBJECT pDriverObject);KdPrint(("")); //DbgPrint用DriverMonitor工具载入驱动用DebugView 查看驱动调试信息===============教案内容====================这节课以VC6来书写代码,但是并不用它来编译.我们先新建一个空的控制台程序,然后将上节课的3个代码文件复制进来,然后在编译器中将mini_ddk.c文件添加进来,然后加入卸载信息,最后代码如下//_stdcall#include //驱动头文件#define INITCODE code_seg("INIT") //这个是卸载函数的预处理#pragma INITCODE //预编译,将INITCODE指定为INITVOID DDK_Unload (IN PDRIVER_OBJECT pDriverObject); //前置说明卸载例程NTSTA TUS DriverEntry(PDRIVER_OBJECT pDriverObject,PUNICODE_STRING B) //TYPEDEF LONG NTSTA TUS这个函数是一个别名,也就是32位无符号整数{KdPrint(("驱动成功被加载...OK++++++++"));//注意这里要用双括号pDriverObject->DriverUnload=DDK_Unload;//回调函数的指针return (1);}VOID DDK_Unload (IN PDRIVER_OBJECT pDriverObject)//卸载函数已经前置声明{KdPrint(("驱动成功被卸载...OK-----------")); //需要这样一个宏相当于sprintf,printfDbgPrint("卸载成功");//当然如果用这条语句就是单括号}这里呢还是用DDK进行编译,以后再用IDE,如果编译第二次有出错的话就加上参数-c,这样就覆盖编译,而编译错误可以看.log文件,里面有详细记录信息.我们加载驱动要用到一个工具DriverMonitor,而为了查看驱动信息还是用到DebugView,查看信息要选上”捕获内核调试信息”和”捕获消息事件”(“Capture Kernel” and “Capture Events”)加载一下发现前面已经加载过了,这里需要重新启机了,但是我们也可以通过改名字来不用关机,经过调试发现了加载和卸载的信息.以后要用到WInDBG来调试驱动,相当于OllyDbg.未加密的教程就到此课,下课开始加密内容.。
【转】在Linux下写一个简单的驱动程序

【转】在Linux下写⼀个简单的驱动程序转⾃:https:///amanlikethis/p/4914510.html 本⽂⾸先描述了⼀个可以实际测试运⾏的驱动实例,然后由此去讨论Linux下驱动模板的要素,以及Linux上应⽤程序到驱动的执⾏过程。
相信这样由浅⼊深、由具体实例到抽象理论的描述更容易初学者⼊⼿Linux驱动的⼤门。
⼀、⼀个简单的驱动程序实例驱动⽂件hello.c#include <linux/module.h>#include <linux/kernel.h>#include <linux/fs.h>#include <linux/init.h>#include <linux/delay.h>#define HELLO_MAJOR 231#define DEVICE_NAME "HelloModule"static int hello_open(struct inode *inode, struct file *file){printk(KERN_EMERG "hello open.\n");return 0;}static ssize_t hello_write(struct file *file, const char __user * buf, size_t count, loff_t *ppos){printk(KERN_EMERG "hello write.\n");return 0;}static struct file_operations hello_flops = {.owner = THIS_MODULE,.open = hello_open,.write = hello_write,};static int __init hello_init(void){int ret;ret = register_chrdev(HELLO_MAJOR,DEVICE_NAME, &hello_flops);if (ret < 0) {printk(KERN_EMERG DEVICE_NAME " can't register major number.\n");return ret;}printk(KERN_EMERG DEVICE_NAME " initialized.\n");return 0;}static void __exit hello_exit(void){unregister_chrdev(HELLO_MAJOR, DEVICE_NAME);printk(KERN_EMERG DEVICE_NAME " removed.\n");}module_init(hello_init);module_exit(hello_exit);MODULE_LICENSE("GPL"); 驱动⽂件主要包括函数hello_open、hello_write、hello_init、hello_exit,测试案例中并没有赋予驱动模块具有实际意义的功能,只是通过打印⽇志的⽅式告知控制台⼀些调试信息,这样我们就可以把握驱动程序的执⾏过程。
helloworld程序编写
helloworld程序编写编写一个Hello World程序是学习任何编程语言的经典起点。
下面,我将为您展示如何使用几种不同的编程语言来编写Hello World程序。
1.PythonPython是一种高级解释型编程语言,以简洁易懂的语法和丰富的库而闻名。
以下是使用Python编写Hello World程序的示例:print("Hello, World!")2.JavaJava是一种面向对象的编程语言,被广泛用于企业级应用开发。
以下是使用Java编写Hello World程序的示例:public class HelloWorld {public static void main(String[] args) {System.out.println("Hello, World!");}}3.C++C++是C语言的扩展,它提供了面向对象和泛型编程的功能。
以下是使用C++编写Hello World程序的示例:#include <iostream>int main() {std::cout << "Hello, World!" << std::endl;return 0;}4.JavaScriptJavaScript是一种主要用于Web开发的脚本语言。
以下是使用JavaScript编写Hello World程序的示例:console.log("Hello, World!");5.C#C#是微软开发的一种面向对象的编程语言,它与Java有些相似。
以下是使用C#编写Hello World程序的示例:using System;class Program {static void Main(string[] args) {Console.WriteLine("Hello, World!");}}在以上示例中,每个程序都打印出了"Hello, World!"。
c语言helloworld代码C语言基础
c语言helloworld代码C语言基础C语言基础C语言是一种广泛应用于计算机编程的高级程序设计语言,具有简洁、高效、灵活等特点。
作为一门基础的编程语言,学习并掌握C语言对于打下编程基础和深入理解计算机原理都具有重要意义。
本文将介绍C语言的基础知识和编写一个简单的Hello World程序。
一、C语言的历史与特点C语言诞生于20世纪70年代初,在贝尔实验室的Unix系统开发过程中,由丹尼斯·里奇(Dennis Ritchie)与肯·汤普逊(Ken Thompson)合作开发而成。
C语言以其简单、高效的特点很快在计算机科学领域得到了广泛应用。
C语言在设计上兼顾了高级语言和低级语言的特点,既可以进行底层的内存操作,又支持高层的面向过程编程。
C语言的语法较为简单,易于学习和使用。
它提供了丰富的标准库,使得程序员在编写程序时更加方便快捷。
二、Hello World程序示例下面是一个基本的Hello World程序示例,它使用C语言编写:```c#include <stdio.h>int main() {printf("Hello, World!\n");return 0;}```上述代码中,`#include <stdio.h>`表示引入了stdio.h标准库,这个库包含了与输入输出相关的函数。
`int main()`是C程序的入口函数,程序从这里开始执行。
`printf("Hello, World!\n");`用于打印输出Hello, World!,`\n`表示换行。
`return 0;`表示程序正常结束。
三、编译与运行要运行上述的Hello World程序,需要进行编译。
将代码保存为以.c 为后缀的源文件,比如hello.c。
接下来,打开命令行窗口,进入到保存源文件的目录中,使用C语言编译器进行编译:```gcc hello.c -o hello```编译成功后,会生成一个可执行文件hello。
helloworld编写及IDEA学生认证
helloworld编写及IDEA学⽣认证HelloWorldHelloWorld编写1.新建⽂件夹代码-code2.后缀为.java3.编写代码1. hello处为⽂件名2. public,void等不能有拼写错误,在notepad++中进⾏编写有助于查找此类错误3. 第⼀次编写如下public class hello {public static viod main(String[] args){System.out.print("Hello,world!");}}4.编译⽂件夹处cmd+空格回车可进⼊控制窗⼝javac hello.java -->java⽂件名出现如下提⽰hello.java:2: 错误: 找不到符号public static viod main(String[] args){^符号: 类 viod位置: 类 hello1 个错误返回notepad++发现void拼写错误,修正如下public class hello {public static void main(String[] args){System.out.print("Hello,world!");}}编译成功后code⽬录下出现hello.class5.运⾏class⽂件java hello -->⽂件名不加后缀遇到问题1.拼写错误:java⼤⼩写敏感,且在notepad++中出现错误的代码颜⾊不会改变2.尽量输出英⽂3.⽂件名与类名保持⼀致,且⾸字母改为⼤写,我将hello.java改为Hello.java,并重新修改代码编译4.符号必须为英⽂5.各种(){}等成对出现最终结果如下Java运⾏机制1.编译型:从头到尾翻译2.解释型:根据需求翻译Java兼容两种特点,先编译后解释IDE及学⽣认证IDEA集成开发⼯具,最近使⽤的为IDEA快捷输⼊:psvm,soutIDEA可以使⽤学⽣在校证明申请免费使⽤旗舰版,下为我的申请过程输⼊学校邮箱后发现⽆法直接认证,我⼜提供了学⽣证内页照⽚的资料,等待回复。
【IT专家】用Python编写运行Hello World程序
输出$ python helloworld.pyHello World
如果你得到的输出与上面所示的一样,那么恭喜!——你已经成功地运行了你
本文由我司收集整编,推荐下载,如有疑问,请与我司联系
的第一个Python程序。
万一你得到一个错误,那么请确保你键入的程序准确无误,然后再运行一下
我们能够用echo命令来显示PATH变量,用$给变量名加前缀以向shell表示我
们需要这个变量的值。我们看到/home/swaroop/bin是PATH变量中的目录之一。
swaroop是我的系统中使用的用户名。通常,在你的系统中也会有一个相似的目
录。你也可以把你选择的目录添加到PATH变量中去——这可以通过运行
PATH=$PATH:/home/swaroop/mydir完成,其中“/home/swaroop/mydir”是我想要添加
到PATH变量中的目录。
当你想要在任何时间、任何地方运行你的程序的时候,这个方法十分有用。它
就好像创造你自己的指令,如同cd或其他Linux终端或DOS提示符命令那样。
提示:对于Python来说,程序、脚本或者软件都是指同一个东西。
令python helloworld.py一样。
在你的程序中合理地使用注释以解释一些重要的细节——这将有助于你的程序
的读者轻松地理解程序在干什么。记住,这个读者可能就是6个月以后的你!
跟在注释之后的是一句Python语句——它只是打印文本“HelloWorld”。print
实际上是一个操作符,而“HelloWorld”被称为一个字符串——别担心我们会在后面
运行“HelloWorld”程序的时候,它所做的事只是说声:“HelloWorld”。正如提出
一步一步实现Linux设备驱动的Helloworld模块
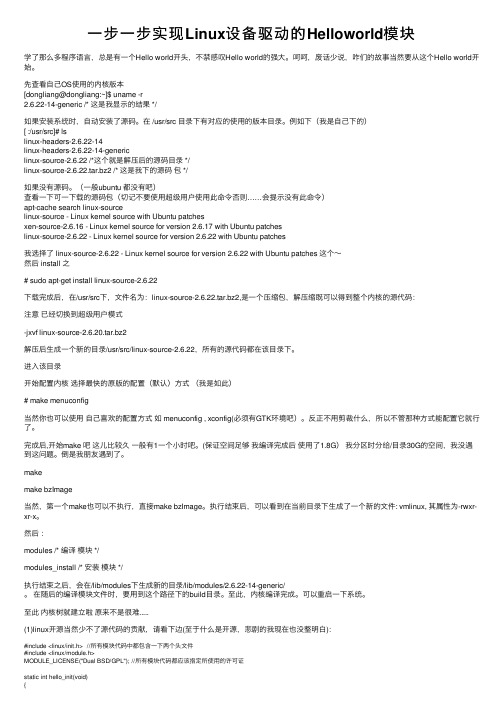
⼀步⼀步实现Linux设备驱动的Helloworld模块学了那么多程序语⾔,总是有⼀个Hello world开头,不禁感叹Hello world的强⼤。
呵呵,废话少说,咋们的故事当然要从这个Hello world开始。
先查看⾃⼰OS使⽤的内核版本[dongliang@dongliang:~]$ uname -r2.6.22-14-generic /* 这是我显⽰的结果 */如果安装系统时,⾃动安装了源码。
在 /usr/src ⽬录下有对应的使⽤的版本⽬录。
例如下(我是⾃⼰下的)[ :/usr/src]# lslinux-headers-2.6.22-14linux-headers-2.6.22-14-genericlinux-source-2.6.22 /*这个就是解压后的源码⽬录 */linux-source-2.6.22.tar.bz2 /* 这是我下的源码包 */如果没有源码。
(⼀般ubuntu 都没有吧)查看⼀下可⼀下载的源码包(切记不要使⽤超级⽤户使⽤此命令否则……会提⽰没有此命令)apt-cache search linux-sourcelinux-source - Linux kernel source with Ubuntu patchesxen-source-2.6.16 - Linux kernel source for version 2.6.17 with Ubuntu patcheslinux-source-2.6.22 - Linux kernel source for version 2.6.22 with Ubuntu patches我选择了 linux-source-2.6.22 - Linux kernel source for version 2.6.22 with Ubuntu patches 这个~然后 install 之# sudo apt-get install linux-source-2.6.22下载完成后,在/usr/src下,⽂件名为:linux-source-2.6.22.tar.bz2,是⼀个压缩包,解压缩既可以得到整个内核的源代码:注意已经切换到超级⽤户模式-jxvf linux-source-2.6.20.tar.bz2解压后⽣成⼀个新的⽬录/usr/src/linux-source-2.6.22,所有的源代码都在该⽬录下。
Windows内核helloworld
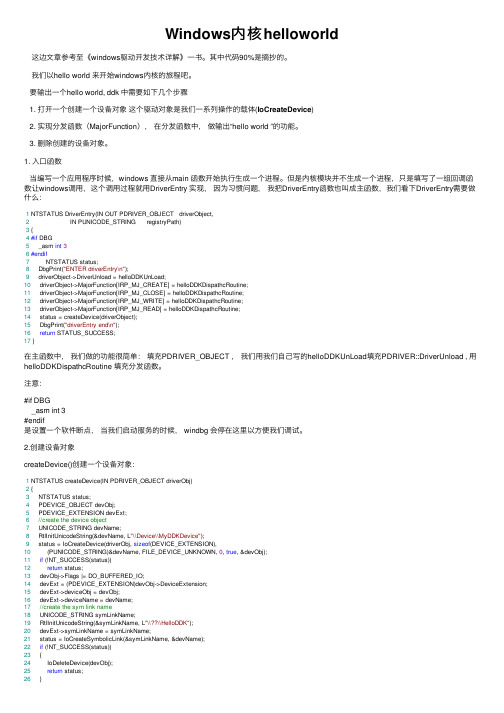
Windows内核helloworld这边⽂章参考⾄《windows驱动开发技术详解》⼀书。
其中代码90%是摘抄的。
我们以hello world 来开始windows内核的旅程吧。
要输出⼀个hello world, ddk 中需要如下⼏个步骤1. 打开⼀个创建⼀个设备对象这个驱动对象是我们⼀系列操作的载体(IoCreateDevice)2. 实现分发函数(MajorFunction),在分发函数中,做输出“hello world ”的功能。
3. 删除创建的设备对象。
1. ⼊⼝函数当编写⼀个应⽤程序时候,windows 直接从main 函数开始执⾏⽣成⼀个进程。
但是内核模块并不⽣成⼀个进程,只是填写了⼀组回调函数让windows调⽤,这个调⽤过程就⽤DriverEntry 实现,因为习惯问题,我把DriverEntry函数也叫成主函数,我们看下DriverEntry需要做什么:1 NTSTATUS DriverEntry(IN OUT PDRIVER_OBJECT driverObject,2 IN PUNICODE_STRING registryPath)3 {4#if DBG5 _asm int36#endif7 NTSTATUS status;8 DbgPrint("ENTER driverEntry\n");9 driverObject->DriverUnload = helloDDKUnLoad;10 driverObject->MajorFunction[IRP_MJ_CREATE] = helloDDKDispathcRoutine;11 driverObject->MajorFunction[IRP_MJ_CLOSE] = helloDDKDispathcRoutine;12 driverObject->MajorFunction[IRP_MJ_WRITE] = helloDDKDispathcRoutine;13 driverObject->MajorFunction[IRP_MJ_READ] = helloDDKDispathcRoutine;14 status = createDevice(driverObject);15 DbgPrint("driverEntry end\n");16return STATUS_SUCCESS;17 }在主函数中,我们做的功能很简单:填充PDRIVER_OBJECT ,我们⽤我们⾃⼰写的helloDDKUnLoad填充PDRIVER::DriverUnload , ⽤helloDDKDispathcRoutine 填充分发函数。
编写最简单的内核:HelloWorld

编写最简单的内核:HelloWorld原文出处:Arjun Sreedharan译文出处:NOALGO博客欢迎分享原创到伯乐头条内核是操作系统最核心的内容,主要提供硬件抽象层、磁盘及文件系统控制、多任务等功能,由于其涉及非常广泛的计算机知识,很少被人们所熟悉,因而披上了一层神秘的面纱。
本文将从零开始实现一个最简单的内核,其可以通过x86系统的GRUB引导启动,并向屏幕输出“Hello World!“字符串。
该内核代码非常简短,并且在本人的Debian 7系统中可以正常运行。
x86机器启动过程在具体实现这个内核之前,我们先看看机器具体是怎么启动并且把控制权交给内核的。
x86的CPU固定地在物理地址为[0xFFFFFFF0]的地方开始运行,这是32位地址空间的最后16个字节。
这里只包含了一个跳转指令,跳转到BIOS把它自己拷贝到的内存区域的地址。
然后,BIOS开始执行。
它首先根据配置的设备启动顺序依次寻找可启动的设备(根据一个特定的魔数可以决定一个设备是否启动)。
一旦找到一个可启动的设备,它就把该设备第一个扇区的内容复制到RAM中物理地址从[0x7C00]开始的地方,然后跳转到该地址并且开始执行那里加载的代码。
这段代码称为启动引导装载程序(bootloader)。
Bootloader然后在物理地址为[0x100000]的地方加载内核,地址[0x100000]就是x86机器上内核的起始地址。
需要的工具•一台x86电脑•Linux•NASM汇编器•gcc•ld(GNU链接器)• grub汇编入口点我们希望用C 来写所有的代码,但免不了要写一点汇编代码。
我们会写一个x86汇编语言的小文件来作为内核的起始点,这段汇编所做的事情就是调用一个我们用C 写的外部函数,然后停止程序运行。
怎么确定这段汇编代码会作为内核的起始点呢?我们会使用一个链接脚本来链接所有的目标文件来产生一个最终的内核可执行映像。
在这个链接脚本中,我们会显式指明二进制文件要加载在地址为[0x100000]的地方,这就是内核所在的地方。
实验7,驱动程序的编写,驱动程序一hello world

实验7 驱动程序的编写一、实验目的:学习利用编写驱动程序,加载驱动模块、显示驱动模块,卸载驱动模块。
二、实验内容前面学习了bootloader kernel filesystem,进行过内核的移植,根文件系统的制作,现在进行驱动程序的编写。
#su root切换root权限密码123456进入实验七目录# mkdir –p /home/poplar/qi (如果没有此目录,建立目录)# cd /home/poplar/qi编写hello.c#gedit hello.chello.c#include<linux/module.h>#include<linux/kernel.h> MODULE_LICENSE("GPL");int insmod_module(void){printk("Hello,World\n");return 0;}void rmmod_module(void) {printk("Goodbye\n]");}module_init(insmod_module);module_exit(rmmod_module);书写Makefile #gedit MakefileKERNELDIR ?= /lib/modules/2.6.32-24-generic/build/PWD := $(shell pwd)CC=$(CROSS_COMPILE)gccobj-m :=hello.omodules:$(MAKE) -C $(KERNELDIR) M=$(PWD) modules (注意$(MAKE)前使用Tab缩进)#make编译编译成功后会得到很多个文件,其中有我们所要的hello.ko通过insmod 可以加载模块到我们的系统上。
#insmod ./hello.ko接着执行#lsmod |grep hello查看驱动,并记录显示内容确实找到了我们编译出来的模块hello.ko显示驱动程序的输出,输出的结果保存到/var/log/messages文件中。
驱动程序开发入门HelloWorld

驱动程序开发入门(一)HelloWorld看了好多天的书!特别到书店买了《Windows 200/xp wdm 设备驱动开发》这本书,在这里我不想怎么评论它!对于高手来说,我觉得她一定不能满足,但是对于像我这样想入门的人来说,仿佛看了半天,还是不知道从何下手。
什么原理、模型、分层等等讲不讲,讲!绝对应该讲!但是你得快点告诉我怎么先弄一个像“Hello Word!”的什么简单来不能再简单的完整的例子给我呀!到网上找阿找啊!那些高手啊!也不为我们新手写点图文并茂的上手资料。
没办法!结合自己的需要再参考一些别人的东东,算是自己的一点不成熟的想法吧!我觉得下面这个介绍非常不错!我能看懂,所以贴了出来。
我道为什么找不到“Hello Word!”呢?原来在驱动开发的例子里是没有所谓的“Hello World”程序的。
这主要还是因为网络上的WDM资料太少造成的。
但是程序的入口点呢?c语言有Main(),用Vc的常看见的是WinMain(),Delphi开发的是Program里的Begin,但是驱动开发呢?那也是应该有程序的入口点啊。
后来我才明白了,那就是DriverEntry()函数。
还有一个问题让我怀疑了老半天,那就是驱动开发的源程序中需不需要include头文件呀?为什么会怀疑呢?那是因为我看了半天的书都没有看到一个完整的驱动程序结构。
真的是郁闷。
下面是我看到的一个完整的结构,我先放上来,让大家看看驱动开发的结构吧。
/***************************************************************程序名称:Hello World for WDM文件名称:HelloWDM.cpp日期:2002-8-16***************************************************************///一定要的头文件,声明了函数模块和变量:#include"HelloWDM.h"/***************************************************************函数名称:DriverEntry()功能描述:WDM程序入口(原来的WinMain被换成了DriverEntry,也是驱动程序的大门)***************************************************************///extern "C"是必须的,表示“用C链接”。
郁金香驱动教程等

/file/bhax4l0v 郁金香驱动01-20课.rar
/file/clvrb94f 郁金香驱动21-33课.rar
/file/aqbd4jpg 郁金香驱动34-37课.rar
/file/e62ohqe2 郁金香驱动38-41.rar
C、用OD附加测试效果
D、反HOOK代码
1.6 NT式驱动的安装-22课
A、OpenSCManager
B、CreateService
C、OpenService
D、StartService
E、CloseServiceHandle
F、集成到loadNTDriver函数
C、用C++方式编译驱动
D、C代码升级至C++
E、优化21课的代码
1.9、再谈VC环境配置-25课
A、编译选项C/C++ Project Option
B、链接选项Link Project Option
C、测试所编译驱动
二、中级篇 郁金香驱动
2.1、手动加载NT式驱动(非工具)-26课
1.4 编写自己的驱动过游戏保护(以11课分析为例)
1.4.1需要具备的理论知识-17课
A、了解SSDT结构
B、由SSDT索引号获取当前函数地址
C、如何获取索引号
D、获取起源地址-判断SSDT是否被HOOK
E、如何向内核地址写入自己代码
1.4.2读出SSDT表当前函数地址-18课
1.3.6实战用windbg调试自己驱动DDK_HelloWorld -14课
A、用户层调试和内核调试区别 郁金香驱动
B、如何下断跟踪
fl2440helloworld模块驱动编写
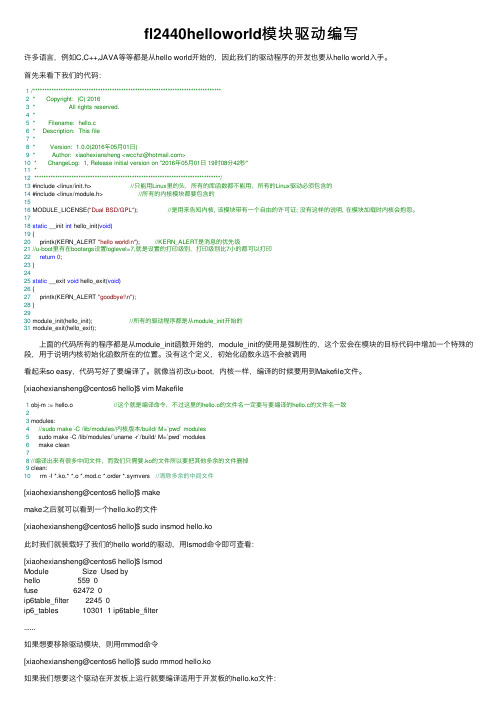
fl2440helloworld模块驱动编写许多语⾔,例如C,C++,JAVA等等都是从hello world开始的,因此我们的驱动程序的开发也要从hello world⼊⼿。
⾸先来看下我们的代码:1/*********************************************************************************2 * Copyright: (C) 20163 * All rights reserved.4 *5 * Filename: hello.c6 * Description: This file7 *8 * Version: 1.0.0(2016年05⽉01⽇)9 * Author: xiaohexiansheng <wcchz@>10 * ChangeLog: 1, Release initial version on "2016年05⽉01⽇ 19时08分42秒"11 *12 ********************************************************************************/13 #include <linux/init.h> //只能⽤Linux⾥的头,所有的库函数都不能⽤,所有的Linux驱动必须包含的14 #include <linux/module.h> //所有的内核模块都要包含的1516 MODULE_LICENSE("Dual BSD/GPL"); //是⽤来告知内核, 该模块带有⼀个⾃由的许可证; 没有这样的说明, 在模块加载时内核会抱怨。
1718static __init int hello_init(void)19 {20 printk(KERN_ALERT "hello world\n"); //KERN_ALERT是消息的优先级21//u-boot⾥有在bootargs设置loglevel=7,就是设置的打印级别,打印级别⽐7⼩的都可以打印22return0;23 }2425static __exit void hello_exit(void)26 {27 printk(KERN_ALERT "goodbye!\n");28 }2930 module_init(hello_init); //所有的驱动程序都是从module_init开始的31 module_exit(hello_exit); 上⾯的代码所有的程序都是从module_init函数开始的,module_init的使⽤是强制性的,这个宏会在模块的⽬标代码中增加⼀个特殊的段,⽤于说明内核初始化函数所在的位置。
Windows驱动开发,vs+vm+wdk安装及hello,world
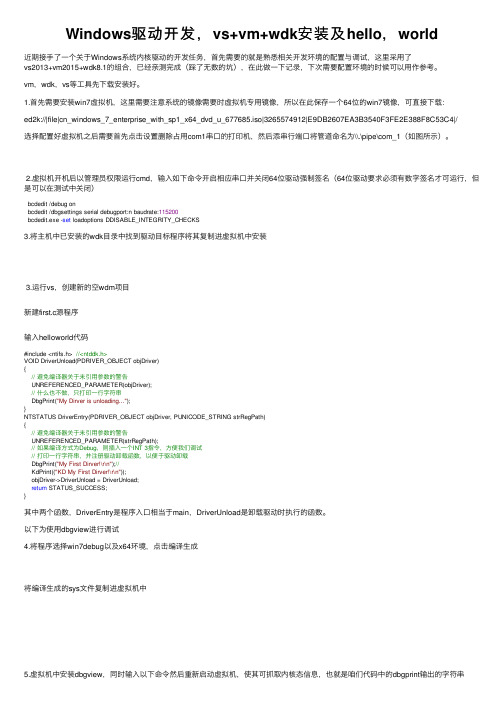
Windows驱动开发,vs+vm+wdk安装及hello,world近期接⼿了⼀个关于Windows系统内核驱动的开发任务,⾸先需要的就是熟悉相关开发环境的配置与调试,这⾥采⽤了vs2013+vm2015+wdk8.1的组合,已经亲测完成(踩了⽆数的坑),在此做⼀下记录,下次需要配置环境的时候可以⽤作参考。
vm,wdk,vs等⼯具先下载安装好。
1.⾸先需要安装win7虚拟机,这⾥需要注意系统的镜像需要时虚拟机专⽤镜像,所以在此保存⼀个64位的win7镜像,可直接下载:ed2k://|file|cn_windows_7_enterprise_with_sp1_x64_dvd_u_677685.iso|3265574912|E9DB2607EA3B3540F3FE2E388F8C53C4|/选择配置好虚拟机之后需要⾸先点击设置删除占⽤com1串⼝的打印机,然后添串⾏端⼝将管道命名为\\.\pipe\com_1(如图所⽰)。
2.虚拟机开机后以管理员权限运⾏cmd,输⼊如下命令开启相应串⼝并关闭64位驱动强制签名(64位驱动要求必须有数字签名才可运⾏,但是可以在测试中关闭)bcdedit /debug onbcdedit /dbgsettings serial debugport:n baudrate:115200bcdedit.exe -set loadoptions DDISABLE_INTEGRITY_CHECKS3.将主机中已安装的wdk⽬录中找到驱动⽬标程序将其复制进虚拟机中安装3.运⾏vs,创建新的空wdm项⽬新建first.c源程序输⼊helloworld代码#include <ntifs.h> //<ntddk.h>VOID DriverUnload(PDRIVER_OBJECT objDriver){// 避免编译器关于未引⽤参数的警告UNREFERENCED_PARAMETER(objDriver);// 什么也不做,只打印⼀⾏字符串DbgPrint("My Dirver is unloading...");}NTSTATUS DriverEntry(PDRIVER_OBJECT objDriver, PUNICODE_STRING strRegPath){// 避免编译器关于未引⽤参数的警告UNREFERENCED_PARAMETER(strRegPath);// 如果编译⽅式为Debug,则插⼊⼀个INT 3指令,⽅便我们调试// 打印⼀⾏字符串,并注册驱动卸载函数,以便于驱动卸载DbgPrint("My First Dirver!\r\n");//KdPrint(("KD My First Dirver!\r\n"));objDriver->DriverUnload = DriverUnload;return STATUS_SUCCESS;}其中两个函数,DriverEntry是程序⼊⼝相当于main,DriverUnload是卸载驱动时执⾏的函数。
Linux驱动程序入门—HelloWorld-蓝博芯科

Linux驱动程序入门—HelloWorld-蓝博芯科Linux驱动程序入门—Hello WorldLinux驱动程序入门—Hello World1、引言记得在学习VC++和C语言的时候,一开始都会以一个HELLO WORLD的例子作为演示,将学者逐渐引入殿堂,这个几乎成了计算机编程语言学习必经的一个入门之路。
当然,在学习linux编程的时候也是这样,下面的例子应该是再熟悉不过了:首先用VI编写一个C程序:vi hello.c#include "stdio.h"int main(){printf("hello world\n");return 0;}接着用GCC进行编译:gcc -o hello hello.c最后运行该程序:./hello在终端上你会看到:hello world上面的是在操作系统基础上进行的用户应用程序的开发。
然而对于linux驱动程序的开发是绝然不同的,因为驱动程序的开发是运行在内核空间的,而应用程序是运行在用户空间的。
虽然hello world是一个简单得不能再简单的程序,但是对于嵌入式linux驱动程序的初学者来说,通过这个过程的操作可以对linux驱动程序开发的过程和其中的一些概念有一个深刻的认识。
所以,我在这里也就以前学习linux的基础上整理了一下,写了这篇博客。
一方面是自己对这方面知识的回顾和巩固,另一方面更是希望这里的内容能给大家提供那么一点点有用的信息,小弟心里就很高兴了。
当然希望有高手可以做下评价和指导,及时纠正小弟的错误,谢谢先。
2、概念驱动程序作为系统内核的一部分,它工作在核心态,而应用程序工作在用户态。
也就是说,程序不能直接通过指针,把用户空间的数据地址传递给内核(因为MMU 映射的地址根本不一样)。
要想在应用程序和驱动程序之间传递数据(指针),就需要经过转换。
把用户态“看到”的空间地址转换成内核态可访问的地址。
编写helloworld驱动
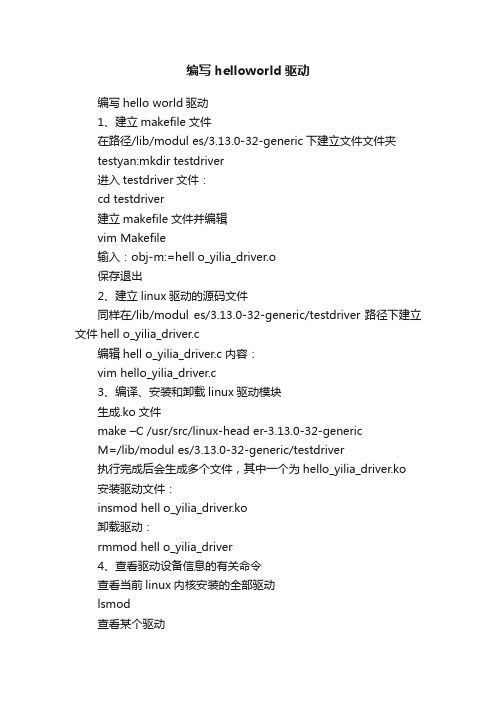
编写helloworld驱动编写hello world驱动1、建立makefile文件在路径/lib/modul es/3.13.0-32-generic下建立文件文件夹testyan:mkdir testdriver进入testdriver文件:cd testdriver建立makefile文件并编辑vim Makefile输入:obj-m:=hell o_yilia_driver.o保存退出2、建立linux驱动的源码文件同样在/lib/modul es/3.13.0-32-generic/testdriver路径下建立文件hell o_yilia_driver.c编辑hell o_yilia_driver.c内容:vim hello_yilia_driver.c3、编译、安装和卸载linux驱动模块生成.ko文件make –C /usr/src/linux-head er-3.13.0-32-genericM=/lib/modul es/3.13.0-32-generic/testdriver执行完成后会生成多个文件,其中一个为hello_yilia_driver.ko 安装驱动文件:insmod hell o_yilia_driver.ko卸载驱动:rmmod hell o_yilia_driver4、查看驱动设备信息的有关命令查看当前linux内核安装的全部驱动lsmod查看某个驱动lsmod | grep –i hello_yilia_driver查看驱动输入信息dmesgdmesg | grep -i hello_yilia_driver查看日志信息cat /var/l og/sysl og |grep hell o_yilia_driver查看驱动信息modinfo查看设备号ls –al /d ev/hello_yilia_driver附一:Hello_yilia_driver.c#includ e#includ e#includ e#includ e#includ e#includ e#d efine DEVICE_NAME "hell o_yilia_driver"static unsigned char mem[1000];static ssize_t char_count = 0;static ssize_t hell o_yilia_driver_read(struct fil e *file, char __user *buf, size_t count, l off_t *ppos);static ssize_t hell o_yilia_driver_write(struct fil e *file, const char __user *buf, size_t count, l off_t *ppos);static struct fil e_operations d ev_fops ={.owner=THIS_MODULE,.read = hell o_yilia_driver_read,.write= hello_yilia_driver_writestatic struct miscd evice misc ={.minor=MISC_DYNAMIC_MINOR, .name=DEVICE_NAME, .fo ps=&d ev_fop s};static ssize_t hell o_yilia_driver_read(struct fil e *file, char __user *buf, size_t count, l off_t *ppos){ssize_t read_count = char_count;if(copy_to_user(buf,(void*)mem,char_count)){return -EINVAL;}printk("read :count : %d\n", (int)count);printk("read :char_count: %d\n",(int)char_count);char_count = 0;return read_count;}static ssize_t hell o_yilia_driver_write(struct fil e *file, const char __user *buf, size_t count, l off_t *ppos){char_count = count;if(copy_from_user(mem,buf,count)){return -EINVAL;}mem[count] = '\0';printk("write:char_count:%d\n", (int)char_count);return char_count;static int __init hello_yilia_driver_init(void){int ret;ret = misc_register(&misc);printk("hell o yilia yan init");return 0;}static void __exit hell o_yilia_driver_exit(void){misc_d eregister(&misc);printk("hell o yilia yan exit");modul e_init(hell o_yilia_driver_init);modul e_exit(hell o_yilia_driver_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("yilia");附二:Makefileifd ef CONFIG_HELLO_YILIA_DRIVERobj-$(CONFIG_HELLO_YILIA_DRIVER):=hello_yilia_driver.o elseobj-m:=hell o_yilia_driver.oendif。
编写 Hello world 模块驱动
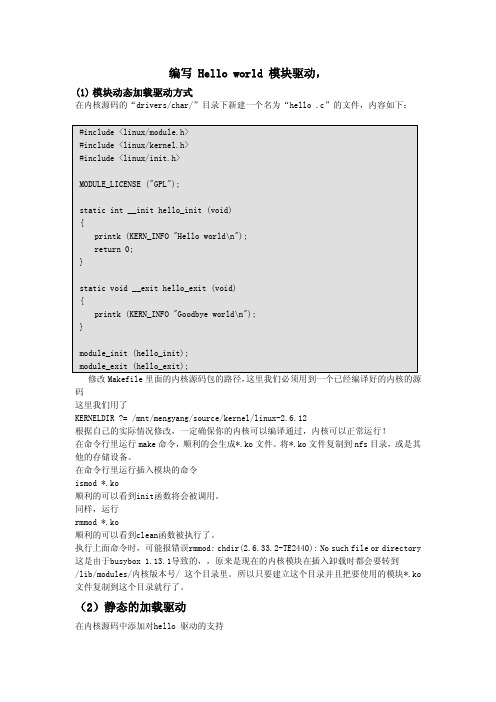
编写 Hello world 模块驱动,(1)模块动态加载驱动方式在内核源码的“drivers/char/”目录下新建一个名为“hello .c”的文件,内容如下:#include <linux/module.h>#include <linux/kernel.h>#include <linux/init.h>MODULE_LICENSE ("GPL");static int __init hello_init (void){printk (KERN_INFO "Hello world\n");return 0;}static void __exit hello_exit (void){printk (KERN_INFO "Goodbye world\n");}module_init (hello_init);module_exit (hello_exit);修改Makefile里面的内核源码包的路径,这里我们必须用到一个已经编译好的内核的源码这里我们用了KERNELDIR ?= /mnt/mengyang/source/kernel/linux-2.6.12根据自己的实际情况修改,一定确保你的内核可以编译通过,内核可以正常运行!在命令行里运行make命令,顺利的会生成*.ko文件。
将*.ko文件复制到nfs目录,或是其他的存储设备。
在命令行里运行插入模块的命令ismod *.ko顺利的可以看到init函数将会被调用。
同样,运行rmmod *.ko顺利的可以看到clean函数被执行了。
执行上面命令时,可能报错误rmmod: chdir(2.6.33.2-TE2440): No such file or directory 这是由于busybox 1.13.1导致的,,原来是现在的内核模块在插入卸载时都会要转到/lib/modules/内核版本号/ 这个目录里。
如何在Python中编写简单的HelloWorld程序
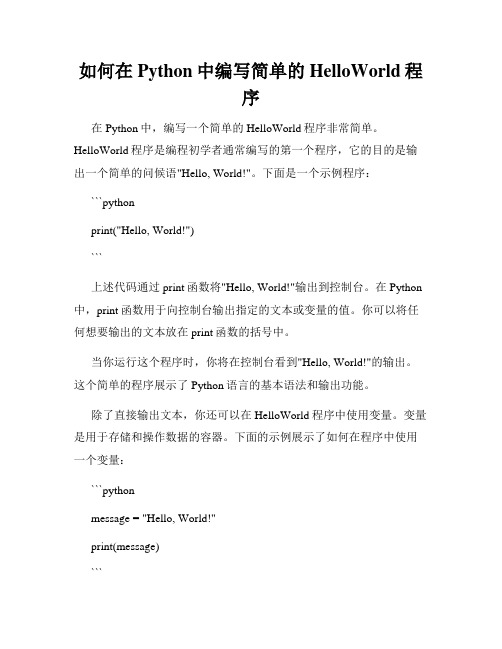
如何在Python中编写简单的HelloWorld程序在Python中,编写一个简单的HelloWorld程序非常简单。
HelloWorld程序是编程初学者通常编写的第一个程序,它的目的是输出一个简单的问候语"Hello, World!"。
下面是一个示例程序:```pythonprint("Hello, World!")```上述代码通过print函数将"Hello, World!"输出到控制台。
在Python 中,print函数用于向控制台输出指定的文本或变量的值。
你可以将任何想要输出的文本放在print函数的括号中。
当你运行这个程序时,你将在控制台看到"Hello, World!"的输出。
这个简单的程序展示了Python语言的基本语法和输出功能。
除了直接输出文本,你还可以在HelloWorld程序中使用变量。
变量是用于存储和操作数据的容器。
下面的示例展示了如何在程序中使用一个变量:```pythonmessage = "Hello, World!"print(message)```在这个程序中,我们首先将"Hello, World!"赋值给名为message的变量。
然后,使用print函数将变量message的值输出到控制台。
结果将与之前的示例相同。
通过使用变量,你可以方便地在程序中存储和修改数据,而不必直接写入代码。
这提供了更大的灵活性和可维护性。
除了输出文本,Python还提供了丰富的功能和库,可用于处理各种不同的任务。
下面是一个使用Python图形库matplotlib绘制简单折线图的示例:```pythonimport matplotlib.pyplot as plt# 定义数据x = [1, 2, 3, 4, 5]y = [1, 4, 9, 16, 25]# 绘制折线图plt.plot(x, y)# 设置图形标题和坐标轴标签plt.title("Square Numbers")plt.xlabel("Value")plt.ylabel("Square of Value")# 显示图形plt.show()```在这个示例中,我们首先导入matplotlib.pyplot库,该库用于绘制各种图形。
(带网址)实现HelloWorld驱动实验碰到的问题
(带网址)实现HelloWorld驱动实验碰到的问题最简单的HelloWorld驱动实验碰到的问题和经验分享今天实验了第一个设备驱动Hello,world!模块,期间碰到了几个问题,在此分享下经验,希望以后的朋友碰到了类似问题能少走弯路.实验环境:主机:Ubuntu10.04,emacs,minicom等.板子:mini2440(128M的nandflash)交叉编译:arm-linux-gcc-4.3.2(友善提供的)内核:linux-2.6.32.2hello.c文件的代码如下:复制代码1.#include2.#include3.MODULE_LICENSE("Dual BSD/GPL");4.5.static int hello_init(void)6.{7. printk(KERN_ALERT "Hello,yuzexi001!\n");8. return 0;9.}10.11.static void hello_exit(void)12.{13. printk(KERN_ALERT "Goodbye,yuzexi001~\n");14.}15.16.module_init(hello_init);17.module_exit(hello_exit);将hello.c保存在自己的工作目录下.并编写一个Makefile文件(自己还不会,基本参考了tekkaman的),内容如下:复制代码1.KERNELDIR = /home/yuzexi/Working/mini2440/linux-2.6.32.22.PWD := $(shell pwd)3.INSTALLDIR = /home/yuzexi/Working/rootfs/lib/modules4.5.CROSS_COMPILE = /usr/local/arm/4.3.2/bin/arm-none-linux-gnueabi-/doc/b110836164.html, = $(CROSS_COMPILE)gcc7.8.obj-m := hello.o9.10.modules:11. $(MAKE) -C $(KERNELDIR) M=$(PWD) modules12.13.modules_install:14. cp hello.ko $(INSTALLDIR)15.16.clean:17. rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions18.19..PHONY:modules modules_install clean/*几点说明:**1,在编译该模块之前,请确保你的内核源码树已经搭建好,也就是给驱动开发的环境是否搭建好了.这个可以参考我们arm9之家论坛里的资料--文件名是"Mini2 440 Linux移植开发实战指南.pdf"具体的链接下载地址自己也忘了.**2,Makefile中的KERNELDIR就是内核源码树的位置,根据自己的实际情况来定.**3,网上有个搭建设备驱动程序开发环境的帖子:/doc/b110836164.html,/s/blog_ 66e7d9b70100i26v.html,可以试试看.*/最后,在工作目录下执行#make modules#make modules_install执行的结果如下所示:root@Ubuntu10-04:/home/yuzexi/Working/myproject/drivers/HelloWorld# ma ke modulesmake -C /home/yuzexi/Working/mini2440/linux-2.6.32.2 M=/home/yuzexi/Wo rking/myproject/drivers/HelloWorld modulesmake[1]: 正在进入目录`/home/yuzexi/Working/mini2440/linux-2.6.32.2'CC [M] /home/yuzexi/Working/myproject/drivers/HelloWorld/hello.o Building modules, stage 2.MODPOST 1 modulesCC/home/yuzexi/Working/myproject/drivers/HelloWorld/hello.mo d.oLD [M] /home/yuzexi/Working/myproject/drivers/HelloWorld/hello.ko make[1]:正在离开目录`/home/yuzexi/Working/mini2440/linux-2.6.32.2'root@Ubuntu10-04:/home/yuzexi/Working/myproject/drivers/HelloWorld# ma ke modules_installcp hello.ko /home/yuzexi/Working/rootfs/lib/modulesroot@Ubuntu10-04:/home/yuzexi/Working/myproject/drivers/HelloWorld# ls hello.c hello.mod.c hello.o modules.orderhello.ko hello.mod.o Makefile Module.symversroot@Ubuntu10-04:/home/yuzexi/Working/myproject/drivers/HelloWorld# 到此,就生成了hello.ko文件,可以通过FTP或者网络或者U盘将hello.ko文件拷贝到开发板(mini2440)中,注意:这里需要拷贝到开发板的/lib/modules/2.6.3 2.2-FriendlyARM目录下面(参考mini2440用户手册7.3.3,第374页).好了,现在假设你已经登录了开发板,并且hello.ko文件已经拷贝到了/lib/mod ules/2.6.32.2-FriendlyARM/目录下面.下面是执行过程: #cd /lib/modules/2.6.32.2-FriendlyARM[*******************.32.2-FriendlyARM]#lshello.ko[*******************.32.2-FriendlyARM]#insmodhello.ko Hello,yuzexi001![*******************.32.2-FriendlyARM]#lsmodhello656 0 - Live 0xbf000000[*******************.32.2-FriendlyARM]#rmmodhellormmod: chdir(2.6.32.2): No such file or directory到这里,问题就出现了,rmmod: chdir(2.6.32.2): No such file or directory 注意这里的问题提示目录为:chdir(2.6.32.2),根据置顶帖"驱动的加载与卸载中常见问题:rmmod chdir no such file or directory 的最终解决办法"11楼wbwe b的提示,于是我大胆的将开发板的/lib/modules/2.6.32.2-FriendlyARM/目录修改为/lib/modules/2.6.32.2/ 后,重新测试后,成功.测试如下:[*******************.32.2]#pwd/lib/modules/2.6.32.2[*******************.32.2]#lshello.ko[*******************.32.2]#insmodhello.koHello,yuzexi001![*******************.32.2]#lsmodhello656 0 - Live 0xbf006000[*******************.32.2]#rmmodhelloGoodbye,yuzexi001~[*******************.32.2]#lsmod[*******************.32.2]#OK,到此为止,第一个HelloWorld驱动模块测试结束~ 希望更多学驱动的朋友越来越顺利~~附一:Mini2440 Linux移植开发实战指南.pdf链接地址找到了,如下:/doc/b110836164.html,/download/mini244 0-linux-guide.zip或者:/doc/b110836164.html,/read.php?tid-5682.html完全参考这个pdf文档,中途会遇到几个小问题,其解决方法可以参考这里:http:// /doc/b110836164.html,/read.php?tid-5964.html这里写下自己遇到的问题:1,理解Mini2440 Linux移植开发实战指南战指南.pdf文档中的这样一句:"将smd k_machine_init()函数调用注释代掉,因为后面会编写自己的初始化函数,不需要调用smdk2440原来的." 这里在后面本应该添加的初始化文档中却没有添加,这里我参考了官方已经移植好的内核来修改的,将s3c_device_nand.dev.platform_ data=&mini2440_nand_info添加到/arch/arm/mach-s3c2440/mach-mini2440.c 的__init mini2440_machine_init(void)函数中2,另外,还需要添加这些头文件:#include#include#include#include#include#include按照上面的pdf文档修改,并按照上面的两条修改后,才能从启动信息中查看到你想要的分区表3,在移植UDA1341音频驱动时,#make menuconfigDevice Drivers-><*>Sound card suppport->[*]preclaim Oss device number s-><*>Advanced Linux Sound Architecture-><*>ALSL for SoC audio support-><*>Soc I2S Audio support UDA134x wired to a S3C24xx 这里的配置直接参考上面的pdf文档即可,不需要将其他的音频驱动也编译到内核,否则在测试时失败! !!默认的内核配置中,这里已经包含了sequencer support 和Dynamic d evice file minior numbers和support old ALSA API, 将这三项去掉后,重新编译内核,音频驱动测试成功!配置菜单的时候并不是越多越好,不知道这句话对不对?呵呵附二:解决卸载模块后的小bug:rmmod: module 'hellop' not found 今天上午修改了hello.c,模块参数的修改这一点.测试如下,但是当卸载hello p后,最后有个小小的问题.[root@FriendlyARM 2.6.32.2]# insmod hellop.kohowmany=10 whom="bey ond"(0):Hello,beyond!(1):Hello,beyond!(2):Hello,beyond!(3):Hello,beyond!(4):Hello,beyond!(5):Hello,beyond!(6):Hello,beyond!(7):Hello,beyond!(8):Hello,beyond!(9):Hello,beyond![*******************.32.2]#lsmodhellop 792 0 - Live 0xbf006000[*******************.32.2]#rmmodhellopGoodbye,Ubuntu10.04~ I love you so much!rmmod: module 'hellop' not found[*******************.32.2]#lsmod[*******************.32.2]#为什么会提示rmmod: module 'hellop' not found呢,请参考帖子:http://blog.chi /doc/b110836164.html,/u1/38994/showart_203 4575.html看完这个帖子后,可能找到了原因,但是不大理解,还请高人帮忙解释下,为什么当/ lib/modules/2.6.32.2/目录下有多个*.ko文件时,会有这个小bug呢,该怎样理解呢,谢谢~情况是这样的,在/lib/modules/2.6.32.2/目录下面,有多个*.ko文件,这里是hello.k o和hellop.ko,于是我将hello.ko和另外一个modules.dep.bb删除后,只剩下hel lop.ko文件,接着重新测试后,不再提示"rmmod: module 'hellop' not found"今天在进行字符设备scull驱动实验的时候,也同样出现了这个问题,其实这里只需要将/lib/modules/2.6.32.2/目录下面的modules.dep.bb删除即可搞定实验如下:[*******************.32.2]#lshello.ko hellop.ko modules.dep.bb[*******************.32.2]#rmmodules.dep.bb[*******************.32.2]#lshello.ko hellop.ko[*******************.32.2]#rmhello.ko[*******************.32.2]#lshellop.ko[*******************.32.2]#lsmod[root@FriendlyARM 2.6.32.2]# insmod hellop.ko howmany=6 whom="yuze xi"(0):Hello,yuzexi!(1):Hello,yuzexi!(2):Hello,yuzexi!(3):Hello,yuzexi!(4):Hello,yuzexi!(5):Hello,yuzexi![*******************.32.2]#lsmodhellop 792 0 - Live 0xbf00c000[*******************.32.2]#rmmodhellopGoodbye,Ubuntu10.04~ I love you so much![*******************.32.2]#lsmod[*******************.32.2]#修改后的hellop.c代码如下:复制代码1.#include2.#include3.#include4.5.static char *whom = "Ubuntu10.04";6.static int howmany = 2;7.module_param(howmany,int,S_IRUGO);8.module_param(whom,charp,S_IRUGO);9.10.static int hello_init(void)11.{12. int i;13. for(i=0;i<howmany;i++)< p="">14. printk(KERN_ALERT "(%d):Hello,%s!\n",i,whom);15. return 0;16.}17.18.static void hello_exit(void)19.{20. printk(KERN_ALERT "Goodbye,Ubuntu10.04~ I love you so much!\n");21.}22.23.module_init(hello_init);24.module_exit(hello_exit);25.MODULE_LICENSE("Dual BSD/GPL");对应的Makefile中将hello.o修改为hellop.o;将hello.ko修改为hellop.ko即可</howmany;i++)<>。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.3.1编写一个名为DDK_HelloWorld简单的驱动
A、VC6集成环境下书写代码
驱动入口函数DriverEntry
入口函数参数DriverObject和RegistryPath
B、书写SOURCES文件
C、书写makefile文件
D、用DDK-Build环境编译
一、新建一个空的TXT文件,取名为miniddk.c
二、mini_ddk.c书写
NT式驱动的相头申明ntddk.h
DriverEntry //入口函数相当于win32编程中的main DriverEntry 有2个参数如下: PDRIVER_OBJECT //此结构用来传递驱动对象,由I/O管理器传递进来的驱动对象PUNICODE_STRING //此结构用来指向此驱动负责的注册表,也就是驱动程序在注册表中的路径
二、书写makefile文件
# 此文件一般情况下只有一行并且不需要修改不能有前导空格
!INCLUDE $(NTMAKEENV)\makefile.def
三、书写Sources文件
#下边这行指定生成驱动名字DDK_HelloWorld.sys
TARGETNAME=DDK_HelloWorld
#下边这行指定生成文件的类型DRIVER指驱动
TARGETTYPE=DRIVER
#下边这行指定生成驱动所在的路径\SYS\DDK_HelloWorld.sys
TARGETPATH=SYS
#下边这行指定相关头文件所在目录路径
INCLUDES=$(BASEDIR)\inc;\
$(BASEDIR)\inc\wxp;\
##上边必空一行D:\WINDDK\3790.1830 等价$(BASEDIR)
#下边这行指定驱动源代码*.cpp或者*.c
SOURCES=mini_ddk.c\
四、用DDK环境build编译出驱动
#include <ntddk.h>
// 驱动程序入口函数格式申明
int DriverEntry(PDRIVER_OBJECT a, PUNICODE_STRING b); //NTSTATUS _stdcall
//------------代码实现部分---------
//#pragma code_seg("INIT")
int DriverEntry( //入口函数main
PDRIVER_OBJECT DriverObject,
PUNICODE_STRING RegistryPath
)
{
//KdPrint(("我们的第一个驱动\n"));
//KdPrint是一个宏在Checked版中会用DbgPrint代替,在Free版中则不执行任何操作要用双括号
//DbgPrint("知其所以然技术论坛\n");
//驱动载入时显示的信息Checked和Free版都会显示
return(0);
}。