动态跟踪系统的性能模型
火控雷达动态目标探测跟踪建模仿真
火控雷达动态目标探测跟踪建模仿真
肖强;张宏伟;韩壮志
【期刊名称】《计算机测量与控制》
【年(卷),期】2015(23)4
【摘要】火控雷达目标探测跟踪是现代与未来防空作战的首要任务,也是火控系统的关键环节;针对火控雷达连续、自动、快速跟踪目标的特点,首先分析了火控雷达系统闭环连续探测跟踪工作流程,然后利用信号级建模方法,在信号层面上进行了雷达回波信号生成、信号处理与跟踪控制的一体化建模,并给出了各模块模型,最后完成动态火控雷达闭环目标距离、方位角与高低角三维探测跟踪测量过程仿真与分析;仿真结果不仅验证了建模方法与模型逼真有效,也对以后火控雷达跟踪性能评估、数据处理等仿真研究有着一定的参考价值.
【总页数】4页(P1222-1225)
【作者】肖强;张宏伟;韩壮志
【作者单位】军械工程学院电子与光学工程系,石家庄050003;军械工程学院电子与光学工程系,石家庄050003;军械工程学院电子与光学工程系,石家庄050003【正文语种】中文
【中图分类】TN95
【相关文献】
1.用于高动态目标探测雷达的相位编码脉冲压缩技术 [J], 张剑;周兴建;卢建川
2.低轨红外探测卫星对大气层内高动态目标的探测能力研究 [J], 田博;谢放;范春懿;
陈素芳;李萌萌
3.近地层紫外动态目标探测微弱信号放大器设计 [J], 李旭辉;吴晗平;李军雨;王连振;岳健民
4.浮空红外探测系统预警高动态目标性能分析 [J], 刘旭;李为民;别晓峰
5.基于双基地雷达探测的跟踪优化建模仿真研究 [J], 程丰;湛兰;卢一帆
因版权原因,仅展示原文概要,查看原文内容请购买。
自动化学科中动态目标追踪控制算法的模型与性能分析

发哥归来——大上海周末的时候,不小心又看了一部爱情片,剧情实在一般,然而因为男神发哥的演技,还是很入迷的看完了。
让我印象深刻的,不是那些扑朔迷离的感情,也不是大先生坚定的内心和明辨的大是大非,而是发哥的几次落泪,触动人心!痛失知秋战乱纷争,日本人的飞机在上海空中盘旋、轰炸,大先生坐在电话旁边不肯离去,他在等一个电话,他不知道知秋在哪儿,是不是需要他的帮助,众人劝他离开的最后一秒,他终于等到那个电话,却是知秋通知他日本人意欲绑架他的消息,然后知秋就消失在电话的那头。
大器在人群中逆流而上,直奔知秋居住的酒店,一个炸弹落下来,整个酒店都泡在大火中,无人生还。
大器站在酒店面前,无法自抑的大声哭喊:“知秋……”,那个叱咤整个上海的大先生,那一刻成了一个无助的孩子,痛的没有地方躲藏,他丢掉的是自己一生的牵挂,那根最软的肋骨!告别大嫂大器年轻时崇拜的师傅被总督儿子关进大牢,为救师傅,大器跪走一路玻璃渣,并用自己的股份换回师傅的安全,从此,洪寿亭烧了大器的拜师贴,与他兄弟相称,同闯上海滩,而洪寿亭的夫人,就成了大先生的大嫂,幕后辅助他们同行。
于洪寿亭一家,大器已然是他们的亲人,有福同享有难同当,这也是黑道人该有的样子!当洪寿亭被日本人抓走,知道自己的老婆被关在慰安所,心理一下子崩溃了,他玩乐为主的后半生理想瞬间破灭,半真半假的痴呆,泡在水池子里,摆弄着一只玩具鸭子。
而大器在深思熟虑之后,忍辱负重闯进日本军营,救出被抓的地下党,和大嫂!此时的大嫂已经奄奄一息,等着大器的到来,见到大器,她使出最后一丝力气说了最后一句话:“好好活着!”,然后不能瞑目的死去了。
大器心疼的抱起大嫂,亲了亲她的额头,昏暗的灯光下,看到他的眼泪吧嗒吧嗒的掉了又掉,那一刻,一个铮铮铁骨的英雄有情有义的形象无比高大!一路同行大器心里一直爱着知秋,那仿佛是他的人生理想,去打拼的时候身边能有她陪伴,便是一生的完美!然而,知秋应该更爱刀马旦,在大器身负枪伤几乎没命的时候,她更关注的是自己的安危和前途。
自动控制原理课程设计-火炮跟踪随动控制系统-精品
课程设计名称:自动控制原理课程设计题目:火炮跟踪随动控制系统专业:班级:姓名:学号:课程设计任务书一、设计题目:车载武器随动系统设计二、设计任务:设计一个随动系统,使其发射端口在要求的精度和时间X围内跟踪目标.三、设计计划:1.查阅相关资料2.确定设计方案3.进展设计并定稿四、设计要求:要求设计的随动系统在跟踪过程有足够的稳定性与快速性指导教师:徐建华教研室主任:徐建华时间:2011年12月9 日中国矿业大学某某学院课程设计成绩评定表摘要随动控制系统又名伺服控制系统。
其参考输入是变化规律未知的任意时间函数。
随动控制系统的任务是使被控量按同样规律变化并与输入信号的误差保持在规定X围内。
这种系统在军事上应用最为普遍.如导弹发射架控制系统,雷达天线控制系统等。
其特点是输入为未知。
本文对一个随动系统进展研究,在准确把握研究的方向根底上,始终以系统的高运行性能为目标,在控制系统的稳定性,快速性,准确性这三者之间的固有矛盾中寻找最优的平衡点。
通过建立模型,元件确定,参数分析,串联校正四大模块,整合自动控制理论的各个知识点,包含了经典控制理论的大局部内容,知识点相互穿插,严密联系,并有机结合成一篇完整的论文。
目录一系统设计的步骤――――――――――――――――――――――――― 1 1.1 设计方案―――――――――――――――――――――――――――1―――――――――――――――――――― 1 ――――――――――――――――――――――――11.2 系统的方框图与开环传函――――――――――――――――――――52.1系统方框图――――――――――――――――――――――――――52.2系统开环传函―――――――――――――――――――――――――61.3 火炮系统的工作过程――――――――――――――――――――――6 1.4 性能指标确实定――――――――――――――――――――――――6 二控制系统方案和主要元部件的选择―――――――――――――――――72.1 系统方案―――――――――――――――――――――――――――7 2.2 元部件选择――――――――――――――――――――――――――7 三开环增益和静态误差计算―――――――――――――――――――――83.1 系统无测速反响――――――――――――――――――――――――8 3.2 系统参加测速反响―――――――――――――――――――――――8――――――――――――――――――――――――9 ――――――――――――――――――――――――9 ―――――――――――――――――――――――――10 3.3 静态误差的计算――――――――――――――――――――――――11 四动态分析和校正装置的设计――――――――――――――――――――13 五结论――――――――――――――――――――――――――――――15 六设计体会――――――――――――――――――――――――――――16 七参考文献――――――――――――――――――――――――――――17一系统设计的步骤1.1设计方案(1)控制任务:控制火炮跟踪目标,确定目标位置,适时开炮击中目标。
第八章模型参考自适应控制(ModelReferenceAdaptiveControl)简称MRAC

第⼋章模型参考⾃适应控制(ModelReferenceAdaptiveControl)简称MRAC第九章模型参考⾃适应控制(Model Reference AdaptiveControl )简称MRAC介绍另⼀类⽐较成功的⾃适应控制系统,已有较完整的设计理论和丰富的应⽤成果(驾驶仪、航天、电传动、核反应堆等等) 。
§ 9—1 MRAC的基本概念系统包含⼀个参考模型,模型动态表征了对系统动态性能的理想要求,MRAC⼒求使被控系统的动态响应与模型的响应相⼀致。
与STR不同之处是MRAC没有明显的辨识部分,⽽是通过与参考模型的⽐较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。
设参考模型的⽅程为*X m~ A m X m Br式(9-1-1)y m = CX m 式(9-1-2)被控系统的⽅程为■X s A s B s r式(9-1-3)y s - CX s 式(9-1-4) 两者动态响应的⽐较结果称为⼴义误差,定义输出⼴义误差为e = y m -y s 式(9-1-5);状态⼴义误差为:=X m — s 式(9-1-6)。
⾃适应控制的⽬标是使得某个与⼴义误差有关的⾃适应控制性能指标J达到最⼩。
J可有不同的定义,例如单输出系统的J —;e2( )d式(9-1-7)或多输出系统的t TJ ⼆e T( )e( )d式(9-1-8) MRAC的设计⽅法⽬的是得出⾃适应控制率,即沟通⼴义误差与被控系统可调参数间关系的算式。
有两类设计⽅法:⼀类是“局部参数最优化设计⽅法”,⽬标是使得性能指标J达到最优化;另⼀类是使得⾃适应控制系统能够确保稳定⼯作,称之为“稳定性理论的设计⽅法。
§ 9 —2局部参数最优化的设计⽅法⼀、利⽤梯度法的局部参数最优化的设计⽅法这⾥要⽤到⾮线性规划最优化算法中的⼀种最简单的⽅法梯度法(Gradient Method )。
1. 梯度法考虑⼀元函数f(x),当:汀(x)/= 0,且f2 (x) / ;x2> 0时f(x)存在极⼩值。
计算机系统性能分析的方法与工具
计算机系统性能分析的方法与工具计算机系统性能分析是指通过对计算机系统的各项指标进行评估和测试,以获得关于系统性能的相关数据和信息。
通过性能分析,可以帮助我们了解系统运行的效率、可靠性和稳定性等方面的情况,为系统的优化和改进提供依据。
本文将介绍计算机系统性能分析的方法和常用工具。
一、性能分析方法1. 性能测试法性能测试是通过模拟真实的负载情况,对计算机系统进行全面的性能评估。
性能测试可以分为负载测试、压力测试、容量测试、稳定性测试等多个维度。
其中,负载测试是指在系统正常运行的情况下,通过增加用户数、并发访问数等方式,测试系统的最大负载能力。
压力测试是指在系统最大负载情况下,增加一定压力,测试系统的稳定性和可用性。
容量测试是指通过逐步增加系统负载,测试系统的性能极限。
稳定性测试是指在持续高负载情况下,测试系统的稳定性和可靠性。
2. 分析法性能分析法是通过对系统运行过程中的各项数据进行监控和分析,来评估系统的性能状况。
常见的性能分析方法包括时间分析法、空间分析法和功耗分析法等。
时间分析法是通过监控系统运行的时间开销,如响应时间、吞吐量等来评估系统性能。
空间分析法是通过监控系统使用的资源占用情况,如内存、磁盘空间等来评估系统性能。
功耗分析法是通过监控系统的能耗来评估系统性能。
3. 模型法模型法是通过建立数学模型来对系统性能进行分析和预测。
常用的模型包括排队论模型、马尔可夫链模型、负载均衡模型等。
排队论模型是通过排队论理论,建立系统的服务模型和排队模型,分析系统的性能瓶颈和瓶颈位置。
马尔可夫链模型是用于描述系统状态变化的模型,通过建立系统的状态转移矩阵,分析系统的各种状态之间的转换情况。
负载均衡模型是用于优化系统负载分布的模型,通过调整系统资源分配,使系统性能达到最优状态。
二、性能分析工具1. 性能监控工具性能监控工具用于实时监控系统的性能指标,如CPU利用率、内存使用情况、网络流量等。
常见的性能监控工具有Zabbix、Nagios等。
第6章 动态跟踪技术

GIS监控调度系统
GIS的组成
GIS 由五个主要的元素所构成: 硬件 软件 数据 人员 方法
GIS类型
地理信息系统从野外调查、地图、遥感、 环境监测和社会经济统计等多种途径获取 地理信息,并将这些信息转换成计算机系 统组织的数据,组成地理数据库。按应用 功能分为:
工具型地理信息系统 应用型地理信息系统 专题地理信息系统 区域地理信息系统
“小红帽”地理信息系统主要包括以下几个功能:
1.客户地址定位:就是系统由一个地理点的地址字符串确定 其地理位置,包括自动定位、交互定位两类。 自动定位 (结果包括三种情况:) 获得了客户的地理位置(经纬度)和客户所在的区站、分站 和投递段,则此客户的地址定位工作结束。 获得了客户的地理位置(经纬度)和客户所在的区站、分站, 但位置在已有的投递段之外,则通过业务系统或仅通过地 理信息系统联系分站,由分站确定投递段,并将投递段信 息返回给系统。同样,若无法准确定位客户在哪个分站, 则联系区站,由区站确定分站,并将分站信息返回给系统。 无法获得客户的地理位置(经纬度),则认为客户提供的地 址有错,通过业务系统或仅通过地理信息系统通知调度联 系客户,重新确定地址。
第6章动态跟踪技术
学习目标
了解动态跟踪系统的组成 掌握GIS、GPS的定义、系统组成、特点、工作原 理与主要功能; 了解GIS、GPS的发展趋势; 了解手机定位技术的主要功能、发展趋势; 掌握GIS、GPS、手机定位在物流管理中的应用。
GIS技术
地理信息系统(Geographic Information System) 是以地理空间数据为基础,采用地理模型分析方 法,适时地提供多种空间的和动态的地理信息, 是一种为地理研究和地理决策服务的计算机技术 系统。
2 m级望远镜跟踪架控制系统动态性能分析

2 m级望远镜跟踪架控制系统动态性能分析邓永停;李洪文;陈涛【摘要】为了增强望远镜的抗风载扰动能力,提高望远镜跟踪架的跟踪精度,本文对2 m望远镜跟踪架伺服控制系统的动态性能进行了测试和分析.首先,采用正弦扫描信号对望远镜跟踪架的结构和伺服系统进行了频率特性测试;其次,采用基于观测器/卡尔曼滤波器的辨识算法,对跟踪架控制系统的频率特性进行了模型辨识;最后,依据辨识获得的控制模型设计了位置和速度控制器,然后对2 m望远镜跟踪架伺服控制系统进行了目标观测实验,实验结果表明:当跟踪最大速度为3.5(°)/s,最大加速度为1(°)/s2的目标时,方位轴和俯仰轴的最大跟踪误差均小于4.5",跟踪误差的RMS值分别为0.378 6"和0.151 6",实验验证了跟踪架控制系统的良好性能.%In order to enhance the ability of disturbance rejection for the telescope,and improve the tracking accuracy of the telescope mount control system,this paper analysis the dynamic of mount control system for the two meters telescope.Firstly,the frequency response of telescope mount control system is test using swept sine.Secondly,the Observer/Klaman filter algorithm is employed to identify the model for the mount control system.Finally,the position controller and speed controller are designed based on the mount control model.The experimental results of target observation show that max tracking errors of the azimuth and elevation axis are less than 4.5",and the tracking error RMS are 0.378 6" and 0.151 6",when the target moving with the max speed 3.5 (°)/s and the max acceleration 1 (°)/s2.The experiments verify the good dynamic of telescope mount control system.【期刊名称】《光学精密工程》【年(卷),期】2018(026)003【总页数】8页(P654-661)【关键词】望远镜;频率响应;模型辨识;伺服系统【作者】邓永停;李洪文;陈涛【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文1 引言地基大口径光电望远镜在实现对空间目标精密跟踪时,需要重点考虑跟踪架伺服控制系统的定点和跟踪误差[1]。
控制系统的动态响应及其性能指标

稳定性
动态响应的稳定性对控制系统的稳定性具有重要影 响,稳定的动态响应有助于减小系统振荡和误差。
准确性
动态响应的准确性决定了控制系统的控制精 度,准确的动态响应能够减小系统输出与设 定值之间的偏差。
性能指标对动态响应的指导作用
设定值跟踪
性能指标中的设定值跟踪能力对动态响应具有指导作用, 要求控制系统能够快速、准确地跟踪设定值。
控制系统的动态响应及其性能指
目 录
• 引言 • 控制系统动态响应分析 • 控制系统性能指标 • 控制系统动态响应与性能指标的关系 • 实际应用案例分析 • 结论与展望
01 引言
控制系统的重要性
控制系统在工业生产、航空航天、交 通运输、家庭生活等各个领域都有广 泛应用,是实现自动化和智能化的关 键技术之一。
优化方法
协同优化可以采用各种优化算法,如梯度下降法、遗传算法等,通 过不断迭代和调整控制参数来寻找最优解。
实际应用
协同优化在实际应用中具有广泛的应用价值,如工业控制、航空航 天、机器人等领域,可以提高控制系统的性能和稳定性。
05 实际应用案例分析
案例一:汽车控制系统的动态响应与性能指标
总结词
汽车控制系统的动态响应与性能指标是衡量汽车性能的重要标准,包括加速、制动、转向等性能。
详细描述
汽车控制系统通过优化发动机、传动系统和底盘等子系统的控制策略,实现快速响应和精确控制。动 态响应和性能指标对汽车的安全性、舒适性和燃油经济性具有重要影响。
案例二:航空控制系统的动态响应与性能指标
总结词
航空控制系统的动态响应与性能指标是确保飞行安全的关键因素,包括稳定性、控制精 度和响应速度等。
对未来研究的展望
要点一
基于FPGA的动态目标跟踪系统设计

e l o t ms a e smp e h mo n s o a a a e lr e a d p r a l a a ll P a d r mp e n a in i d p e l g r h r i l ,te a u t f d t r a g n at l p r l ,F GA h r wa e i lme tt s a o td.T e r a i i y e o h n mo e
中 图 分 类 号 :T 1 .2 N9 17 文 献 标 识 码 :A
M o i g t r e r c i g s s e d sg a e n F v n a g t ta k n y t m e i n b s d o PGA
W U Ch n in Z a g Ja g, HAO u Hu , HENG B YU Xio Ya B iZ o, a n (colo lc clad Ifr ai nier g ] n s nvr t,Z ej n 10 3, hn ) Sh o fEet a n nom t n E gne n , i gu U i sy h ni g2 2 1 C ia i r o i a ei a
a mo ig tr e r c i g s se b s d o P vn a g t ta kn y t m a e n F GA.T i d sg s s t e p r mi mo e f i g r c s ig.As lw n mi de e — hs ein u e h ya d d l o ma e p o e sn o ad d l -lv
计算机系统性能评估:介绍计算机系统性能评估的基本方法、工具和实践

计算机系统性能评估:介绍计算机系统性能评估的基本方法、工具和实践引言随着计算机技术的不断发展和普及,计算机系统的性能评估变得越来越重要。
无论是现代企业的服务器集群,还是个人电脑的性能提升,都需要通过系统性能评估来优化和改进。
计算机系统性能评估是一项综合性的工作,涉及到硬件、操作系统、应用程序等多个方面。
本文将介绍计算机系统性能评估的基本方法、工具和实践,帮助读者全面了解和掌握这一重要领域。
性能评估的重要性计算机系统性能评估对于各个领域的计算机应用都是至关重要的。
在企业中,一台高性能的服务器能够带来更好的业务处理能力,提升效率和降低成本。
在个人电脑领域,一台性能强大的电脑能够提供更流畅的用户体验,让用户能够更好地完成各种任务。
性能评估的重要性有以下几个方面:1.优化资源利用:通过性能评估,我们可以了解计算机系统的资源利用情况,包括处理器、内存、硬盘等各个方面。
通过优化资源的利用效率,我们可以提高系统的整体性能。
2.发现瓶颈与问题:在系统性能评估中,我们可以找出系统中的性能瓶颈和问题,并采取相应的措施来解决。
比如,在一个网络服务器中,可能会出现网络带宽限制、硬盘读写速度慢等问题,通过性能评估可以及时发现并解决这些问题。
3.预估系统容量:通过性能评估,我们可以预估系统的容量,为后续的业务扩展和升级提供参考。
比如,在一个电子商务网站中,我们可以通过性能评估来预估服务器的负载情况,为后续的用户增长提供相应的扩展方案。
4.产品评估和选择:在购买计算机产品时,性能评估是一个非常重要的指标。
通过综合考量系统的性能指标,我们可以选择适合自己需求的计算机产品,避免因为性能不足而导致的使用困扰。
综上所述,计算机系统性能评估对于系统优化、问题解决和产品选择都具有重要的意义。
下面我们将介绍计算机系统性能评估的基本方法、工具和实践。
基本方法在进行计算机系统性能评估时,我们可以采用多种方法来评估系统的性能。
这些方法可以根据实际情况的不同进行选择和组合使用。
机械系统的动态特性识别与模型建立
机械系统的动态特性识别与模型建立一、引言机械系统是指由各种机械元件组成的物体,它们相互连接并通过相对运动来完成各种工作。
在实际应用中,我们经常需要对机械系统的动态特性进行分析和识别,以便更好地设计和控制机械设备。
本文将探讨机械系统的动态特性识别以及模型建立的方法和技术。
二、机械系统的动态特性识别机械系统的动态特性识别是指通过实验或理论分析,获取机械系统在不同工况下的动态响应数据,并进一步对其进行分析和识别。
动态特性通常包括频率响应、阻尼比、共振等指标。
下面将介绍几种常见的动态特性识别方法。
1. 频率响应识别频率响应是指机械系统在不同激励频率下的响应情况。
对于线性系统,可以通过施加不同频率的激励信号,测量系统的响应来获取频率响应曲线。
一般可以采用频率扫描法或频率跟踪法来得到频率响应曲线。
2. 阻尼比识别阻尼比是指机械系统响应的衰减程度,可以用来描述系统的稳定性和抗振能力。
阻尼比的识别方法主要包括模态分析法和自适应方法。
模态分析法通过测量系统的自由振动模态参数来计算阻尼比;自适应方法则通过对实时响应信号进行处理,根据响应的衰减情况来估计阻尼比。
3. 共振识别共振是指机械系统在某一频率下振幅增大的现象。
共振一般会导致系统不稳定、损坏或工作异常。
共振的识别方法可以通过扫频实验或模态分析来进行。
扫频实验是通过改变激励频率来观察系统的响应情况,当振幅明显增大时即为共振点;模态分析则通过计算系统的模态参数,如共振频率和模态阻尼来判断是否存在共振现象。
三、机械系统模型的建立机械系统模型的建立是基于已有的动态特性数据,通过建立数学模型来描述机械系统的运动规律。
常用的机械系统模型包括线性模型和非线性模型。
下面将介绍几种常见的机械系统模型建立方法。
1. 传递函数建模传递函数建模是一种常见的线性模型建立方法。
它通过将机械系统分解为串联和并联的传递函数来描述系统的动态特性。
传递函数是输入与输出之间的关系函数,可以通过系统的频率响应曲线来识别和确定。
控制系统的性能评估与指标选择

控制系统的性能评估与指标选择控制系统是现代工程中非常重要的一部分,它可以使得各种设备和系统达到预期的性能水平。
为了确保控制系统能够正常运行并取得满意的效果,我们需要进行性能评估并选择合适的指标来衡量其性能。
本文将探讨控制系统的性能评估方法以及指标的选择。
一、控制系统性能评估的方法在评估控制系统的性能时,我们需要采用一系列方法来对其进行全面的评估。
以下是几种常见的控制系统性能评估方法:1. 数学模型分析:通过建立控制系统的数学模型,使用数学工具对其进行分析,如传递函数、状态空间模型等。
通过模型分析,我们可以得到系统的频率响应、稳定性、误差特性等信息,从而评估其性能。
2. 实验测试:利用实际的控制系统进行测试和实验,获取系统的实际性能数据。
可以通过观察实验结果,比较实际输出与期望输出的差异,来评估系统的性能。
3. 模拟仿真:使用计算机软件对控制系统进行仿真模拟,模拟不同输入条件下系统的运行情况。
通过观察仿真结果,评估系统的性能。
4. 系统观测:通过观察和记录实际工作中的控制系统行为,分析控制系统在实际运行过程中的性能表现。
可以观察系统的稳态误差、动态响应等指标,来评估系统的性能。
二、控制系统性能评估的指标选择在控制系统性能评估过程中,我们需要选择合适的指标来衡量系统的性能。
以下是一些常见的控制系统性能指标:1. 稳定性指标:包括阻尼比、自然频率、超调量等。
稳定性是控制系统的基本要求之一,衡量系统能否快速、准确地响应给定输入信号,保持系统的稳定性。
2. 响应速度指标:包括上升时间、峰值时间等。
响应速度是衡量系统动态性能的重要指标,它反映了系统对输入信号的快速响应能力。
3. 精度指标:包括稳态误差、静态误差等。
精度指标衡量系统输出与期望输出之间的偏差,反映了系统对输入信号的准确跟踪能力。
4. 鲁棒性指标:衡量系统对参数变化、外部扰动等不确定性因素的抗干扰能力。
常用的指标包括稳定裕度、相位裕度等。
5. 频率响应指标:包括增益裕度、带宽等。
自动跟踪系统
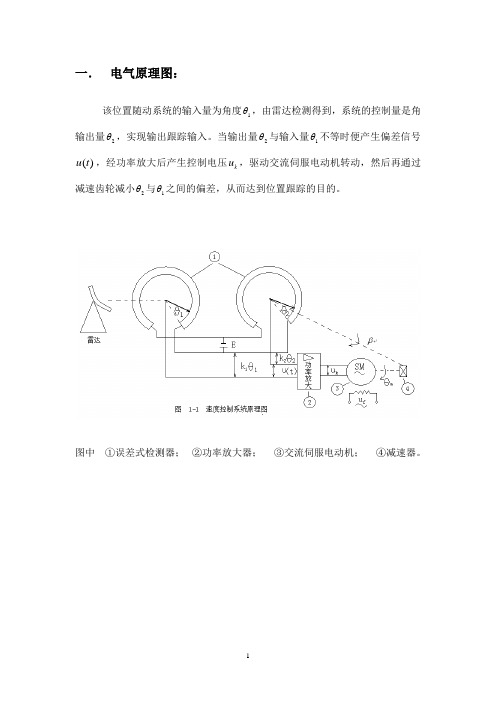
一. 电气原理图:该位置随动系统的输入量为角度1θ,由雷达检测得到,系统的控制量是角输出量2θ,实现输出跟踪输入。
当输出量2θ与输入量1θ不等时便产生偏差信号()u t ,经功率放大后产生控制电压k u ,驱动交流伺服电动机转动,然后再通过减速齿轮减小2θ与1θ之间的偏差,从而达到位置跟踪的目的。
图中 ①误差式检测器; ②功率放大器; ③交流伺服电动机; ④减速器。
二.各环节的数学模型及传递函数(1)误差检测器误差检测器是由一对电位器组成的。
对于单个电位器空载时,电位器的电刷角位移 与输出电压 的关系曲线如图2-1所示。
图中阶梯状是由绕组线线径产生的误差,理论分析时可用直线近似。
由此可得出输出电压:11()()t k t μθ= (2-1)式中1m axEk θ=,是电刷单位角位移对应的输出电压, 电位器传递系数,其中是电位器电源电压,m ax θ是电位器最他工作角。
当用一对相同的电位器如图1-1所示组成误差检测器时,其输出电压为:121121()()()[()()]()t t t k t t k t μμμθθθ=-=-=∆ (2-2)式中,K1是单个电位器的传递系数; 12()()()t t t θθθ∆=-是两个电位器角位移之差称为 误差角。
对式(2-2)求拉氏变换,并令[()]s U L t μ=, ()[()]s L t θ∆Θ=∆,得到以误差角为输入量时,误差检测器的传递函数为 :1()()s U G s K s ==∆Θ(2-3) 其方框图表示为(2)功率放大器由于角位移差()u t 很小,因此,由误差检测器输出电压U(t)也很小,如此以此电压直接地加在交流伺服电动机上,将无法使其正常工作。
因此,有必要在中间加个功率放大器对U (t )进行放大,又由于功率放大器的输入阻抗无穷大,因而对误差检测器来说也就忽略了负载效应。
由于放大器的输入输出特性知:2()()k t k t μμ=(2-4) 两边拉氏变换得传递函数:2()()k s k U s μ= (2-5)功率放大的方框图(3)交流伺服电动机交流伺服电动机是由两个相互垂直的定子和一个高电阻值的绕子组成。
机械工程中自适应控制系统设计与稳定性分析

机械工程中自适应控制系统设计与稳定性分析自适应控制系统在机械工程中扮演着重要的角色,它能够根据系统的实时变化和外部干扰,自动调整控制参数,使系统能够稳定工作并满足性能要求。
本文将介绍机械工程中自适应控制系统的设计原理及稳定性分析方法。
自适应控制系统的设计是通过对系统建模和参数辨识,实现对系统动态特性的准确描述,进而设计出适应系统动态变化的控制器。
首先,需要建立系统的数学模型,在此过程中,可以使用传统的物理方程或现代控制理论来描述系统的动态行为。
在系统模型建立完成后,下一步是对系统的参数进行辨识。
参数辨识是指通过实验测量数据,利用系统模型,确定系统的未知参数。
常见的参数辨识方法有最小二乘法、极大似然法等。
通过参数辨识,可以准确获取系统的参数值,为后续的控制器设计提供基础。
接下来,是自适应控制器的设计。
自适应控制器的主要思想是根据系统的实时输出和期望输出之间的误差,利用误差调整控制器的参数,以达到系统动态变化时的最优控制效果。
根据系统的不同特性和控制要求,可以采用不同的自适应控制策略,如模型参考自适应控制、模型预测控制等。
在自适应控制系统设计完成后,需要对其稳定性进行分析。
稳定性是一个重要的指标,它决定了系统是否能够在各种不确定性和干扰的情况下保持稳定工作。
稳定性分析的方法有多种,其中一种常用的方法是利用线性时不变系统的理论进行分析。
通过将自适应控制系统线性化,得到系统的传递函数,进而利用传统的稳定性分析方法,如根轨迹法、频率响应法等,来研究系统的稳定性。
此外,也可以利用Lyapunov稳定性理论对非线性自适应控制系统进行稳定性分析。
除了稳定性分析,还需要对自适应控制系统的性能进行评估。
性能评估主要包括系统的跟踪性能和鲁棒性。
跟踪性能是指控制系统能够使实际输出跟随期望输出进行稳定、准确的运动。
鲁棒性是指控制系统对模型误差、参数变化和外部干扰的抵抗能力。
可以通过仿真和实验来评估自适应控制系统的性能,并根据评估结果对系统进行进一步的优化。
基于模型预测控制的水下机器人动态目标跟踪控制

高技术通讯2020年第30卷第6期;606-614doi:10.3772/j.issn.1002-0470.2020.06.008基于模型预测控制的水下机器人动态目标跟踪控制①魏亚丽②朱大奇③褚振忠(上海海事大学智能海事搜救与水下机器人上海工程技术研究中心上海201306)摘要针对水下动态目标跟踪问题,研究了基于模型预测控制(MPC)的水下机器人跟踪控制方法。
首先,对于多波束前视声纳图像所采集的图像,通过滤波去噪、阈值分割及特征提取处理,得到动态跟踪目标的位置信息;然后构建无迹卡尔曼滤波器预测动态目标的轨迹信息,通过与卡尔曼滤波器对比,体现了无迹卡尔曼滤波对动态目标预测结果的准确性;最后,应用模型预测控制器实现对动态目标的水下跟踪,解决了反步控制算法中速度超限的问题,使跟踪结果更加稳定可靠。
实验与仿真表明所提动态目标跟踪控制方法有效可行。
关键词水下机器人;跟踪控制;模型预测控制(MPC);动态目标;前视声纳0引言水下动态目标跟踪技术在海洋资源勘探、水下工程作业、海战场监视及水下精确制导等方面具有广泛的应用前景。
近年来,水下动态目标跟踪问题研究得到了一定的发展,在声纳图像处理及动态目标定位方面提出了很多方法。
文献[1]提出了基于声纳图像的高斯混合基数化概率假设密度(Gaussi-an mixture cardinality probability hypothesis density, GM-CPHD)滤波算法,更有效地实现了目标状态及数目的估计。
文献[2]提出了基于鲁棒粒子滤波的被动声纳多目标跟踪算法,该算法能够在保持多目标连续跟踪的同时跟踪未知的时变多目标,提高了水下目标跟踪的准确性。
文献[3]针对主动声纳测量误差引入的目标机动决策模糊问题,提出了一种基于机动检测延迟的跟踪滤波算法,提高了声纳图像目标定位的精度。
文献[4]研究了基于交互式多模型的水下动态目标跟踪问题,在动态目标轨迹预测中具有较好的实时性与可靠性。
运动平台上跟踪系统主镜筒动态特性分析

舰船、飞机、卫星等) 这样一来跟踪架既要跟踪 目 上。 标又要克服运动载体 自身以及经其传递至跟踪系统的
振 动的影 响 ,以稳 定视 轴 实现精 确跟 踪测 量 。这对 跟踪 架提 出 了更加 严格 的要 求 ,除 了要 有高 的机械 精 度
和结构刚度外还要有 良好的动态特性 。跟踪系统的主镜筒承载着主光学系统和部分探测分系统 ,是跟踪系
运 动平 台上跟踪 系统 主镜 筒动态特 性分析
李 自怀 1,刘顺发 ,扈宏毅 ,赵 华 , 2
( .中国科学院光 电技术研究所 ,成都 6 00 ; 1 12 9
2 .中国科学院研究生院 ,北京 10 4 ) 009 摘要 :本文根据运动平 台上某跟踪 系统主镜筒的设 计方案 ,在 a ss平 台下建立 系统有 FT ny  ̄L分析模型 ,求得 了主 - 镜 筒的前 十阶 固有频率和结构 的强弱分布 ,确定 了结构分析 的重点为主 、次镜的相对位置变化 定义 了描 述主、
统 最为 关键 的部 件之 一 ,其 结构 直接 决定 着 系统 的性能 ,因此研 究其 动力 特性 对整 个 系统 的分 析设计 具 有 重 要的 意义 。
基于主镜筒的重要地位 ,上世纪末就 已有学者着手对其性能进行分析研究。其中长春光机所的杨洪波 就撰文探讨空间遥感相机镜筒的静力变形L,并提出设计方案的改善途径 ;王俊【 l J 2 等分析 了加强筋对空间 光学镜筒的固有频率的影响 ,开始 了结构动力学计算。随后进入二十一世纪 ,主镜筒性能的研究开始呈现 多元性 , 其中具有代表性的是镜筒结构设计优化 , 镜筒设计轻量化 ,镜筒热应力分析等p ] 。这些研究分析
图 1 有限元模型
F g 1 F n t lme t d l i. ii ee n e mo e
机载光电稳定平台的强鲁棒性滑模变结构控制

·30·兵工自动化Ordnance Industry Automation2021-0540(5)doi: 10.7690/bgzdh.2021.05.008机载光电稳定平台的强鲁棒性滑模变结构控制马经帅,于洵,韩峰(西安工业大学兵器科学与技术学院,西安 710000)摘要:为使机载光电稳定平台系统在复杂环境下仍具有强鲁棒性,建立光电稳定平台数学模型。
以两轴四框架光电吊舱为研究对象,通过分析噪声干扰及本身结构参数的变化对光电稳定平台的影响,提出基于干扰观测器(disturbance observer,DOB)的滑模控制器设计方案。
理论推导和仿真结果表明:滑模变结构控制(sliding mode variable structure control,SMVSC)对干扰力矩和摄动完全适应,对系统结构参数变化和外界扰动具有良好的鲁棒性;比无干扰观测器的控制系统,拥有更高的稳定精度和更快的动态响应,能增强光电稳定平台的抗扰动能力。
关键词:光电稳定平台;滑模变结构控制;干扰观测器;强鲁棒性中图分类号:TP273 文献标志码:AStrong Robust Sliding Mode Variable Structure Control inAirborne Photoelectric Stabilized PlatformMa Jingshuai, Yu Xun, Han Feng(College of Ordnance Science & Technology, Xi’an Technological University, Xi’an 710000, China) Abstract: In order to make the airborne optoelectronic stabilized platform system still have strong robustness in complex environments, a mathematical model of the optoelectronic stabilized platform is established. Taking the two-axis four-frame photoelectric pod as the research object, by analyzing the influence of noise interference and changes in its structural parameters on the photoelectric stabilized platform, a design scheme of sliding mode controller based on disturbance observer (DOB) is proposed. Theoretical derivation and simulation results show that: sliding mode variable structure control (SMVSC) is fully adaptable to disturbance torque and perturbation, and has good robustness to system structural parameter changes and external disturbances; it has higher performance than control systems without disturbance observers. Stable accuracy and faster dynamic response enhance the anti-disturbance capability of the photoelectric stabilized platform.Keywords: photoelectric stabilization platform; SMVSC; DOB; strong robustness0引言机载光电稳定平台一般由光电载荷、陀螺、框架结构、驱动及控制系统等组成,是一种光、机、电高度集成的精密设备,用于目标的搜索捕获和跟踪等。
改进的GMPF在动态跟踪系统中的应用

si et t nproma c o y a ctakn s se ta R mai ef r nefrd n mi rc i y tm h nS DD2Ka nftr P a dGMP . o g l ma i e , F n l F
Ke r s y a ct a k n ;s a e e t ao ;s u r o to e o d o d rd v d d d fe e c ;M o t ro y wo d :d n mi r c i g t t s i t r q a er o fs c n - r e i ie i r n e m f n eCa l ;GM a t l i e p ri ef tr c l
21年 7 02 月
计 算机 工程 与设计
COM PUTER ENGI NEERI NG AND DES GN I
J l 0 2 uy2 1
Vo . 3 NO 7 13 .
第3卷 3
第 7 期
改进 的 G F在 动 态 跟 踪 系 统 中 的应 用 MP
李 沁 雪 , 彭 志平 ( 东石 油化 工 学院 计算机 与 电子信 息 学院 ,广 东 茂 名 5 50 ) 广 200
特卡 罗的重要性采样和进化的再采样方法 ,以减轻粒子滤波 (F 的样本退化 问题 ,增强样本的 多样性。实验 结果表 明,与 P)
平 方根 二 阶 差分 K l n 波 、P 、GM 粒 子 滤波 相 比 ,该 状 态估 计 器提 高 了动 态跟 踪 系统状 态估 计 器 的综 合 估 计性 能 。 a ma 滤 F
摘 要 :针 对 动 态跟 踪 系统 的 非 线 性 问题 ,提 出一 种 非 线 性 非 高斯 性 能较 优 的 状 态估 计 器 :考 虑 最 新 观 测 值 的 影 响 ,使 用 基 于 平 方根 二 阶 差 分 (R D )的 高斯 混合 ( M)模 型 给 出粒子 滤波 的 建议 分布 。重要 性 采 样 和再 采 样 阶段 分 别采 用基 于 蒙 SD 2 G
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
动态代码插桩 (Dynamic Binary Instrumentation, DBI) 技 术分为 3 类。第 1 类是基于即时编译 (JIT)方式的动态插桩技 术,典型的实现为 Valgrind 和 Pin 等。第 2 类是基于探测器 方式的动态插桩技术,典型的实现有 DynInst 和 Kprobes。 第 3 类是结合虚拟化技术和即时编译方式的动态插桩技术, 可以弥补第 1 类插桩方式下无法覆盖到内核态代码的缺陷, 典型的实现有 PinOS 等。 动态跟踪 (Dynamic Tracing, DTrace)系统 [1]是第 2 类动态 代码插桩技术的一种应用实现。通过动态跟踪可以对运行着 的生产系统和运行着的程序进行跟踪、收集并分析其行为。 在平台方面,动态跟踪系统在 Solaris, FreeBSD 和 Mac OS 平 台上均已实现。在程序方面,动态跟踪系统支持 C, C++, Java 和多种脚本语言,可以在开发过程中帮助调试和进行性能评 估。在维护方面,通过动态跟踪系统能够在不修改代码和不 使用其他的分析工具的情况下,进行长期的性能数据采样并 分析性能瓶颈。在系统安全方面,可以帮助进行各种安全行 为的审计和分析,抑或通过对程序行为的跟踪来检测恶意软 件和入侵事件。 针对跟踪程序可自定义化的特点和需要在生产系统上进 行长期运行的可能性,本文通过对动态跟踪系统的分析,提 出了一个完整的性能分析模型。通过该模型可以对影响值进 行预测,也可以帮助对跟踪程序进行优化。
图3
探测器触发流程
图2
DTrace(1cmd)用户程序流程
整个流程可以划分为 5 个阶段: 阶段 1(图 3 中 A— >B):探测器在正常的上下文环境中 触发后,首先转入相应的异常 /中断处理函数中,进行现场保 护的工作,然后回调提供器处理函数。 阶段 2(图 3 中 B— >C):转入到提供器内,找出触发点所 对应的探测器。获取探测器下挂载的 dtrace_probe,准备交由 D 虚拟机进行下一步的工作。 阶段 3(图 3 中 C— >D): D 虚拟机中验证探测器的权限和 触发状态,然后执行 dtrace_probe 内的各控制块中所定义的 探测器操作。此阶段中需要关闭中断。 阶段 4(图 3 中 D— >E):当 D 虚拟机执行完毕后,返回 提供器处理函数进行余下的工作。 阶段 5(图 3 中 E— >F):回到异常 /中断处理函数中,模 拟执行插桩点上被替换掉的原指令。完成所有的工作之后重 建被中断的现场,并将程序控制转回到被中断的上下文中, 整个跟踪过程完成。 系 统 调 用 提 供 器 (Syscall) 的 插 桩 方 式 是 修 改 系 统 调 用 表,其触发方式上不依赖于异常或者中断处理函数,所以触 发流程中没有阶段 1 和阶段 5。 PID 提供器可以针对用户进程实行细粒度的代码插桩, 所以需要能支持对任意指令的模拟。 简单的指令 (跳转、 RET、 PUSH EBP、CALL 和 NOP 指令 )会在提供器内部的阶段 4 中 进行模拟执行。对于其他指令,将该指令和一条跳转回正常 执行序列的跳转指令 (JMP rel32)一起复制到用户进程中的可 —45—
Performance Model of Dynamic Tracing System
TAO Jie, YANG Min
(Parallel Processing Institute, Fudan University, Shanghai 201203) 【Abstract】Dynamic Tracing(DTrace) can be used on live production systems to tune and monitor both user programs and operating system itself. When DTrace is enabled on live systems, it introduces some performance penalty. This paper presents the performance model of DTrace by analyzing its software architecture and its internal work flow, and obtains this model’s parameters in real world. Experiments show this performance model can predicate the performance penalty correctly. 【Key words】Dynamic Binary Instrumentation(DBI); Dynamic Tracing(DTrace); performance analysis
执行段中 ( 记为 addr)。返回被中断的用户进程时,将先返回 到 addr 处执行原有指令, 然后跳转回正常的指令处继续执行。 D 虚拟机与探测器复用 探测器在内核和用户进程中是唯一存在的,为了支持系 统中一个或多个不同的脚本对同一探测器的多个跟踪请求, DTrace 通过对探测器的抽象化实现了探测器的复用。DTrace 内核中以 dtrace_probe 描述每个探测器,每个对该探测器的 使用请求均以一个独立启用控制块 (ECB)[1]来表示。 控制块由 断言和操作列表 2 部分组成。同一个 dtrace_probe 下的各个 控制块以单链表的方式互相链接。 D 虚拟机的执行过程如图 3 中深色部分所示。在阶段 B 中,提供器通过 dtrace_probe()函数启动 D 虚拟机。D 虚拟机 中首先进行针对本次触发的初始化操作。然后依次调入 dtrace_probe 下挂载的控制块。对于每个控制块,先进行控制 块相关的初始化工作。如果控制块中存在断言,则取出断言 中的 DIFO 部分进行执行,根据执行结果判断该断言是否被 满足。 DIFO 是 D 编译器根据用户对探测器的描述而生成的 一系列虚拟指令,类似于 Java 的字节码。其指令集类似精简 并包括一组有限的模拟寄存器。 通过 dtrace–S 指令集 (RISC), 命令可以获取编译后 DIFO 的内容。断言满足时, D 虚拟机 读取控制块内的操作列表,依次执行列表上的各个操作。操 作分为 3 类: (1)DIFO ,由 D 虚拟机解释执行; (2)DTrace 框 架中已经预定义的动作,例如 stack()获取内核栈等;(3)数据 的聚合操作。当控制块中的操作都执行完之后, D 虚拟机调 入下一个控制块继续执行。 当虚拟机执行完探测器下挂载的所有控制块后打开中 断,然后转回到提供器内开始阶段 C 的工作。 2.4
概述
图1
DTrace 体系结构
2
2.1
动态跟踪系统
动态跟踪系统的软件构架 动态跟踪系统 [1] 的设计目标是为了能在系统中提供一个 既能用于用户态程序又能用于内核态程序的完整的跟踪工 具,其整体结构如图 1 所示。
整个 DTrace 系统分为 5 个部分, 自上而下分别是 DTrace 用户程序、DTrace 库、DTrace 内核模块、DTrace 提供器和分 散在内核代码中的各种插桩点及中断 /异常处理函数。 位于内核中的 DTrace 模块 (dtrace(7d))是整个结构的核心
第 35 卷 Vol.35
第 10 期 No.10
计 算 机 工 程 Computer Engineering
文章编号:1000—3428(2009)10—0044—05 文献标识码:A
2009 年 5 月 May 2009
中图分类号:TP311
·软件技术与数据库·
动态跟踪系统的性能模型
陶 捷,杨 珉
(复旦大学并行处理研究所,上海 201203) 摘 要:能用于生产环境中进行实时监控和实时调优的动态跟踪系统在跟踪过程中会给被跟踪的程序和系统引入未知的性能影响。为估算 和量化这一影响值,通过对动态跟踪系统的软件架构和运行流程等方面的分析,提出计算该影响值的方法,并实测获取了计算过程中所需 的各种参数。实验结果表明,该性能模型能够准确地对影响值进行预判。 关键词:动态代码插桩;动态跟踪;性能分析
作者简介:陶 捷(1982-), 男,硕士研究生,主研方向: 系统软件, 机群监控和管理,高性能计算;杨 收稿日期:2008-09-08 珉,博士 E-mail:052053007@
—44—
部分。DTrace 内核模块独立构成了整个动态跟踪系统的框架 ( 图 1 中由点划框、虚线框和点线框表示的部分 ) 。独立的 DTrace 框架使得不同的插桩方式 (称为提供器 )可在该框架下 独立实现。提供器 (图 1 中虚线框中的各个部分 )是一个个独 立的内核模块,实现了一种同步或者异步的插桩方式。提供 器作为可访问的伪设备, 在被加载的时候向 DTrace 框架进行 注册;框架在需要提供器协同工作之时,通过回调函数来使 用这些提供器。用户态中 DTrace 分为 2 部分: (1)负责接收 跟 踪 请 求 和 显 示 收 集 到 的 数 据 的 DTrace 用 户 程 序 (dtrace(1m))。 (2)DTrace 库 (libdtrace(3lib))。 DTrace 库提供了统一的用于控制 DTrace 内核模块的接 口,主要负责: (1)对跟踪脚本进行编译并传递给 DTrace 内核模块 (图 1 中 D Compiler 部分 )。 (2)创建或抓取需要受控的用户进程,并请求 Fasttrap 元 提供器动态生成与用户进程相关的提供器 ( 图 1 中点划线箭 头所表示的流程 )。 (3)接收并执行 DTrace 用户关于读取 DTrace 内核状态和 收集到的数据的请求。 DTrace 用户程序和 DTrace 库加上用 户自定义的跟踪脚本,便构成一个完整的 DTrace 跟踪程序 (图 1 中浅色箭头所表示的流程 )。 跟踪程序的运行流程 典型的跟踪程序执行过程如图 2 所示。跟踪程序首先打 开各提供器 (伪设备 )和 DTrace 模块 (伪设备 ),如果这些设备 是第一次被访问,则系统会要求先加载这些设备。然后各提 供器收集系统内所有由其负责的插桩点。接着对跟踪脚本内 的探测器说明进行检查、编译并封装成 DOF[1]。如需跟踪用 户进程,则创建或者抓取那些需要被受控的进程映像。随后 DTrace 模块根据收到的 DOF 的内容,启用相应的探测器。 在所有被请求了的探测器都启用之后,将先前创建和被抓取 的进程恢复为运行状态,然后系统正式进入跟踪状态。此后 跟踪程序进入一个循环过程 (图 2 中的深色部分 )。循环体中 定期地通过 ioctl()取得 DTrace 内核中的状态信息、主缓冲区 和聚合缓冲区 ( 如果有 ) 的内容,分析并显示收集到的信息 ( 该 过程称为刷新 )。 2.2