粒子滤波MATLAB代码
matlab滤波器设计(源代码)
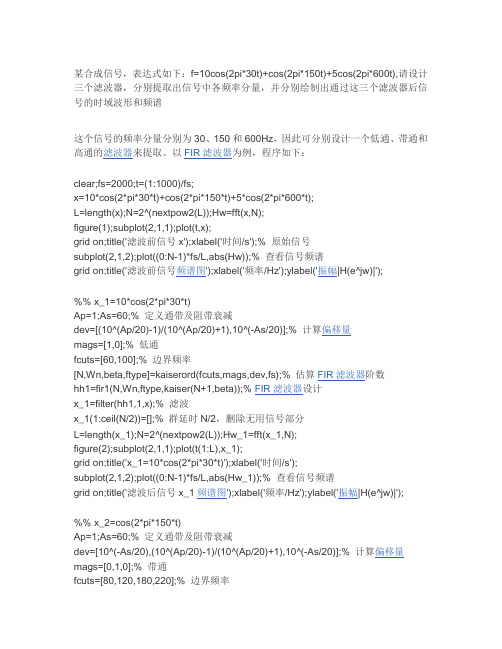
某合成信号,表达式如下:f=10cos(2pi*30t)+cos(2pi*150t)+5cos(2pi*600t),请设计三个滤波器,分别提取出信号中各频率分量,并分别绘制出通过这三个滤波器后信号的时域波形和频谱这个信号的频率分量分别为30、150和600Hz,因此可分别设计一个低通、带通和高通的滤波器来提取。
以FIR滤波器为例,程序如下:clear;fs=2000;t=(1:1000)/fs;x=10*cos(2*pi*30*t)+cos(2*pi*150*t)+5*cos(2*pi*600*t);L=length(x);N=2^(nextpow2(L));Hw=fft(x,N);figure(1);subplot(2,1,1);plot(t,x);grid on;title('滤波前信号x');xlabel('时间/s');% 原始信号subplot(2,1,2);plot((0:N-1)*fs/L,abs(Hw));% 查看信号频谱grid on;title('滤波前信号频谱图');xlabel('频率/Hz');ylabel('振幅|H(e^jw)|');%% x_1=10*cos(2*pi*30*t)Ap=1;As=60;% 定义通带及阻带衰减dev=[(10^(Ap/20)-1)/(10^(Ap/20)+1),10^(-As/20)];% 计算偏移量mags=[1,0];% 低通fcuts=[60,100];% 边界频率[N,Wn,beta,ftype]=kaiserord(fcuts,mags,dev,fs);% 估算FIR滤波器阶数hh1=fir1(N,Wn,ftype,kaiser(N+1,beta));% FIR滤波器设计x_1=filter(hh1,1,x);% 滤波x_1(1:ceil(N/2))=[];% 群延时N/2,删除无用信号部分L=length(x_1);N=2^(nextpow2(L));Hw_1=fft(x_1,N);figure(2);subplot(2,1,1);plot(t(1:L),x_1);grid on;title('x_1=10*cos(2*pi*30*t)');xlabel('时间/s');subplot(2,1,2);plot((0:N-1)*fs/L,abs(Hw_1));% 查看信号频谱grid on;title('滤波后信号x_1频谱图');xlabel('频率/Hz');ylabel('振幅|H(e^jw)|');%% x_2=cos(2*pi*150*t)Ap=1;As=60;% 定义通带及阻带衰减dev=[10^(-As/20),(10^(Ap/20)-1)/(10^(Ap/20)+1),10^(-As/20)];% 计算偏移量mags=[0,1,0];% 带通fcuts=[80,120,180,220];% 边界频率[N,Wn,beta,ftype]=kaiserord(fcuts,mags,dev,fs);% 估算FIR滤波器阶数hh2=fir1(N,Wn,ftype,kaiser(N+1,beta));% FIR滤波器设计x_2=filter(hh2,1,x);% 滤波x_2(1:ceil(N/2))=[];% 群延时N/2,删除无用信号部分L=length(x_2);N=2^(nextpow2(L));Hw_2=fft(x_2,N);figure(3);subplot(2,1,1);plot(t(1:L),x_2);grid on;title('x_2=cos(2*pi*150*t)');xlabel('时间/s');subplot(2,1,2);plot((0:N-1)*fs/L,abs(Hw_2));% 查看信号频谱grid on;title('滤波后信号x_2频谱图');xlabel('频率/Hz');ylabel('振幅|H(e^jw)|');%% x_3=5*cos(2*pi*600*t)Ap=1;As=60;% 定义通带及阻带衰减dev=[10^(-As/20),(10^(Ap/20)-1)/(10^(Ap/20)+1)];% 计算偏移量mags=[0,1];% 高通fcuts=[500,550];% 边界频率[N,Wn,beta,ftype]=kaiserord(fcuts,mags,dev,fs);% 估算FIR滤波器阶数hh2=fir1(N,Wn,ftype,kaiser(N+1,beta));% FIR滤波器设计x_3=filter(hh2,1,x);% 滤波x_3(1:ceil(N/2))=[];% 群延时N/2,删除无用信号部分L=length(x_3);N=2^(nextpow2(L));Hw_3=fft(x_3,N);figure(4);subplot(2,1,1);plot(t(1:L),x_3);grid on;title('x_3=5*cos(2*pi*600*t)');xlabel('时间/s');subplot(2,1,2);plot((0:N-1)*fs/L,abs(Hw_3));% 查看信号频谱grid on;title('滤波后信号x_3频谱图');xlabel('频率/Hz');ylabel('振幅|H(e^jw)|');。
matlab 粒子滤波代码
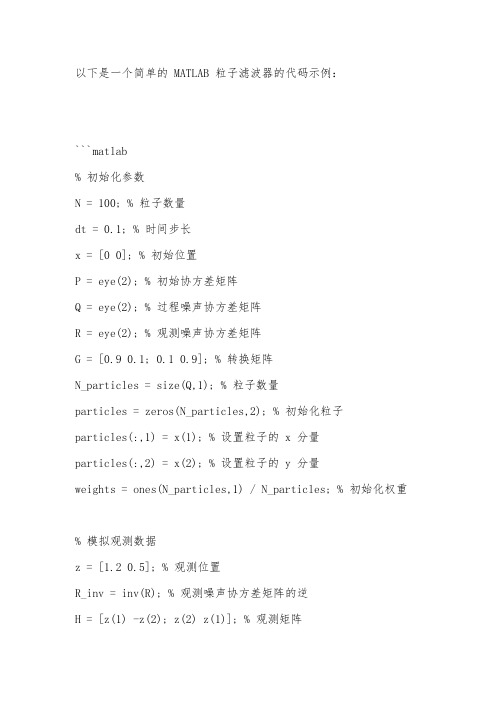
以下是一个简单的 MATLAB 粒子滤波器的代码示例:```matlab% 初始化参数N = 100; % 粒子数量dt = 0.1; % 时间步长x = [0 0]; % 初始位置P = eye(2); % 初始协方差矩阵Q = eye(2); % 过程噪声协方差矩阵R = eye(2); % 观测噪声协方差矩阵G = [0.9 0.1; 0.1 0.9]; % 转换矩阵N_particles = size(Q,1); % 粒子数量particles = zeros(N_particles,2); % 初始化粒子particles(:,1) = x(1); % 设置粒子的 x 分量particles(:,2) = x(2); % 设置粒子的 y 分量weights = ones(N_particles,1) / N_particles; % 初始化权重% 模拟观测数据z = [1.2 0.5]; % 观测位置R_inv = inv(R); % 观测噪声协方差矩阵的逆H = [z(1) -z(2); z(2) z(1)]; % 观测矩阵y = H * x; % 预测的观测值% 粒子滤波步骤for t = 1:100% 重采样步骤weights = weights / sum(weights);index = randsample(1:N_particles, N, true, weights); particles = particles(index,:);% 预测步骤x_pred = particles;P_pred = Q;x_pred = G * x_pred;P_pred = P_pred + dt * G * P_pred;P_pred = P_pred + P_pred * G' + R;% 更新步骤y_pred = H * x_pred;S = H * P_pred * H' + R_inv;K = P_pred * H' * inv(S);x = x_pred + K * (z - y_pred);P = P_pred - P_pred * K * H';end```在这个代码示例中,我们使用了两个步骤:重采样步骤和预测/更新步骤。
matlab滤波器代码要点
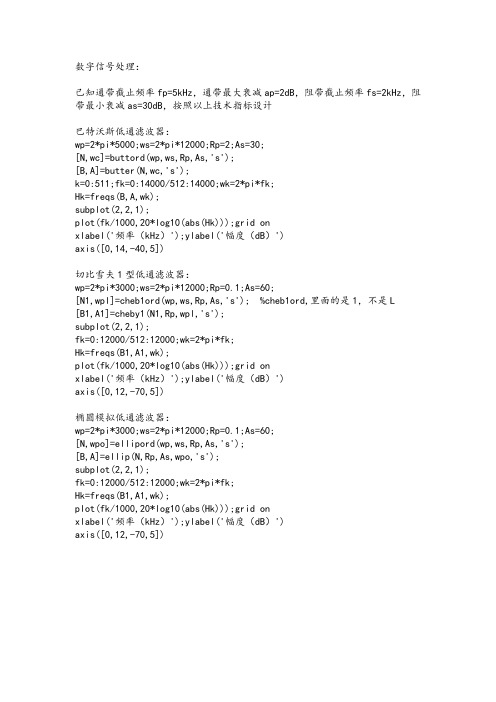
数字信号处理:已知通带截止频率fp=5kHz,通带最大衰减ap=2dB,阻带截止频率fs=2kHz,阻带最小衰减as=30dB,按照以上技术指标设计巴特沃斯低通滤波器:wp=2*pi*5000;ws=2*pi*12000;Rp=2;As=30;[N,wc]=buttord(wp,ws,Rp,As,'s');[B,A]=butter(N,wc,'s');k=0:511;fk=0:14000/512:14000;wk=2*pi*fk;Hk=freqs(B,A,wk);subplot(2,2,1);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,14,-40,5])切比雪夫1型低通滤波器:wp=2*pi*3000;ws=2*pi*12000;Rp=0.1;As=60;[N1,wpl]=cheb1ord(wp,ws,Rp,As,'s'); %cheb1ord,里面的是1,不是L[B1,A1]=cheby1(N1,Rp,wpl,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;Hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,12,-70,5])椭圆模拟低通滤波器:wp=2*pi*3000;ws=2*pi*12000;Rp=0.1;As=60;[N,wpo]=ellipord(wp,ws,Rp,As,'s');[B,A]=ellip(N,Rp,As,wpo,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;Hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,12,-70,5])p195-14wp=2*4/80;ws=2*20/80;rp=0.5;rs=45;[N,wc]=buttord(wp,ws,rp,rs);[B,A]=butter(N,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid on P195-16wp=2*325/2500;ws=2*225/2500;rp=1;rs=40;[N,wc]=ellipord(wp,ws,rp,rs);[B,A]=ellip(N,rp,rs,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid onP195-15wp=2*4/80;ws=2*20/80;rp=0.5;rs=45;[N,wc]=cheb1ord(wp,ws,rp,rs);[B,A]=cheby1(N,rp,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid on 切比雪夫低通滤波器wp=2*pi*3000;ws=2*pi*12000;rp=0.1;as=60;[N1,wp1]=cheb1ord(wp,ws,rp,as,'s');[B1,A1]=cheby1(N1,rp,wp1,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(hk)));grid onxlabel('频率(kHZ)');ylabel('幅度(db)');axis([0,12,-70,5])双音频检测audiofile='test.wav'[in_audio,fs,bits]=wavread(audiofile); [b,a]=cheby1(5,0.1,0.3);out_audio=filter(b,a,in_audio);sound(out_audio,fs,bits);wavwrite(out_audio,fs,bits,'test_out'); xk1=fft(in_audio,512);xk2=fft(out_audio,512);subplot(2,1,1);stem(abs(xk1));subplot(2,1,2);stem(abs(xk2));巴特沃斯模拟高通滤波器。
粒子滤波算法matlab实例
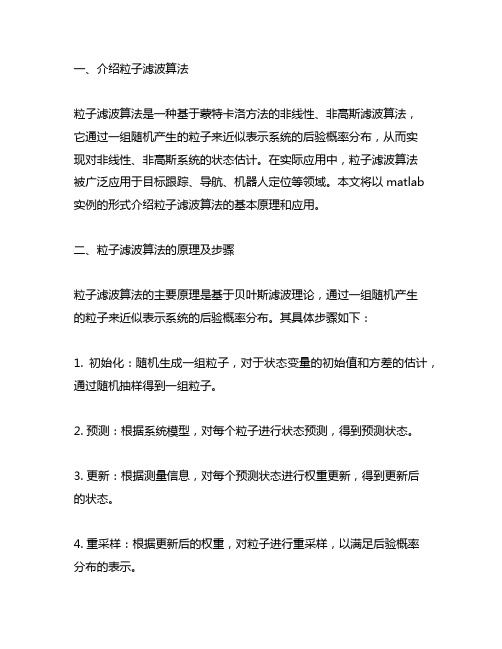
一、介绍粒子滤波算法粒子滤波算法是一种基于蒙特卡洛方法的非线性、非高斯滤波算法,它通过一组随机产生的粒子来近似表示系统的后验概率分布,从而实现对非线性、非高斯系统的状态估计。
在实际应用中,粒子滤波算法被广泛应用于目标跟踪、导航、机器人定位等领域。
本文将以matlab 实例的形式介绍粒子滤波算法的基本原理和应用。
二、粒子滤波算法的原理及步骤粒子滤波算法的主要原理是基于贝叶斯滤波理论,通过一组随机产生的粒子来近似表示系统的后验概率分布。
其具体步骤如下:1. 初始化:随机生成一组粒子,对于状态变量的初始值和方差的估计,通过随机抽样得到一组粒子。
2. 预测:根据系统模型,对每个粒子进行状态预测,得到预测状态。
3. 更新:根据测量信息,对每个预测状态进行权重更新,得到更新后的状态。
4. 重采样:根据更新后的权重,对粒子进行重采样,以满足后验概率分布的表示。
5. 输出:根据重采样后的粒子,得到对系统状态的估计。
三、粒子滤波算法的matlab实例下面以一个简单的目标跟踪问题为例,介绍粒子滤波算法在matlab中的实现。
假设存在一个目标在二维空间中运动,我们需要通过一系列测量得到目标的状态。
我们初始化一组粒子来近似表示目标的状态分布。
我们根据目标的运动模型,预测每个粒子的状态。
根据测量信息,对每个预测状态进行权重更新。
根据更新后的权重,对粒子进行重采样,并输出对目标状态的估计。
在matlab中,我们可以通过编写一段简单的代码来实现粒子滤波算法。
我们需要定义目标的运动模型和测量模型,然后初始化一组粒子。
我们通过循环来进行预测、更新、重采样的步骤,最终得到目标状态的估计。
四、总结粒子滤波算法是一种非线性、非高斯滤波算法,通过一组随机产生的粒子来近似表示系统的后验概率分布。
在实际应用中,粒子滤波算法被广泛应用于目标跟踪、导航、机器人定位等领域。
本文以matlab实例的形式介绍了粒子滤波算法的基本原理和应用,并通过一个简单的目标跟踪问题,展示了粒子滤波算法在matlab中的实现过程。
matlab滤波器代码
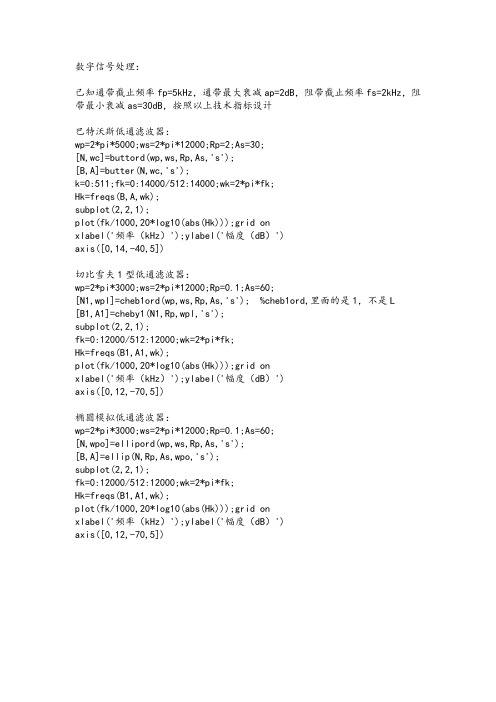
数字信号处理:已知通带截止频率fp=5kHz,通带最大衰减ap=2dB,阻带截止频率fs=2kHz,阻带最小衰减as=30dB,按照以上技术指标设计巴特沃斯低通滤波器:wp=2*pi*5000;ws=2*pi*12000;Rp=2;As=30;[N,wc]=buttord(wp,ws,Rp,As,'s');[B,A]=butter(N,wc,'s');k=0:511;fk=0:14000/512:14000;wk=2*pi*fk;Hk=freqs(B,A,wk);subplot(2,2,1);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,14,-40,5])切比雪夫1型低通滤波器:wp=2*pi*3000;ws=2*pi*12000;Rp=0.1;As=60;[N1,wpl]=cheb1ord(wp,ws,Rp,As,'s');%cheb1ord,里面的是1,不是L[B1,A1]=cheby1(N1,Rp,wpl,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;Hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,12,-70,5])椭圆模拟低通滤波器:wp=2*pi*3000;ws=2*pi*12000;Rp=0.1;As=60;[N,wpo]=ellipord(wp,ws,Rp,As,'s');[B,A]=ellip(N,Rp,As,wpo,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;Hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(Hk)));grid onxlabel('频率(kHz)');ylabel('幅度(dB)')axis([0,12,-70,5])p195-14wp=2*4/80;ws=2*20/80;rp=0.5;rs=45;[N,wc]=buttord(wp,ws,rp,rs);[B,A]=butter(N,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid on P195-16wp=2*325/2500;ws=2*225/2500;rp=1;rs=40;[N,wc]=ellipord(wp,ws,rp,rs);[B,A]=ellip(N,rp,rs,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid onP195-15wp=2*4/80;ws=2*20/80;rp=0.5;rs=45;[N,wc]=cheb1ord(wp,ws,rp,rs);[B,A]=cheby1(N,rp,wc);[hk,wk]=freqz(B,A);fk=wk/pi*40;plot(fk,20*log10(abs(hk)));axis([0,30,-100,0])xlabel('频率(kHZ)');ylabel('幅度(db)');grid on 切比雪夫低通滤波器wp=2*pi*3000;ws=2*pi*12000;rp=0.1;as=60;[N1,wp1]=cheb1ord(wp,ws,rp,as,'s');[B1,A1]=cheby1(N1,rp,wp1,'s');subplot(2,2,1);fk=0:12000/512:12000;wk=2*pi*fk;hk=freqs(B1,A1,wk);plot(fk/1000,20*log10(abs(hk)));grid onxlabel('频率(kHZ)');ylabel('幅度(db)');axis([0,12,-70,5])双音频检测audiofile='test.wav'[in_audio,fs,bits]=wavread(audiofile); [b,a]=cheby1(5,0.1,0.3);out_audio=filter(b,a,in_audio);sound(out_audio,fs,bits);wavwrite(out_audio,fs,bits,'test_out'); xk1=fft(in_audio,512);xk2=fft(out_audio,512);subplot(2,1,1);stem(abs(xk1));subplot(2,1,2);stem(abs(xk2));巴特沃斯模拟高通滤波器。
pf算法举例及其matlab实现-概述说明以及解释
pf算法举例及其matlab实现-概述说明以及解释1.引言1.1 概述PF算法(Particle Filter Algorithm),又称为粒子滤波算法,是一种基于蒙特卡洛方法的非线性滤波算法。
与传统的滤波算法相比,PF算法具有更大的灵活性和鲁棒性,在估计复杂非线性系统状态的过程中表现出良好的性能。
PF算法基于一种随机采样的思想,通过对系统状态进行一系列粒子的采样,再通过对这些粒子的权重进行重要性重采样,最终获得对状态估计的准确性更高的结果。
在PF算法中,粒子的数量决定了滤波算法的精度,粒子越多,估计结果越准确,但也会增加计算复杂度。
因此,在实际应用中需要根据实际情况灵活选择粒子数量。
作为一种高效的滤波算法,PF算法在众多领域都有广泛的应用。
例如,粒子滤波算法在目标跟踪、传感器网络定位、机器人定位与导航等领域都有着重要的作用。
其在目标跟踪领域的应用尤为突出,由于PF算法可以处理非线性和非高斯分布的情况,使得目标跟踪更加准确和稳定。
在Matlab中,PF算法也得到了广泛的应用和实现。
Matlab提供了丰富的函数和工具箱,可以便捷地实现PF算法。
借助Matlab的强大数据处理和可视化功能,我们可以更加便捷地进行粒子滤波算法的实现和结果分析。
本文将从PF算法的基本概念出发,介绍其应用举例和在Matlab中的具体实现。
通过对PF算法的研究和实践,我们可以更好地理解和应用这一强大的滤波算法,为实际问题的解决提供有效的手段。
通过对Matlab 的使用,我们还可以更加高效地实现和验证粒子滤波算法的性能,为进一步的研究和应用奠定基础。
在接下来的章节中,我们将详细介绍PF算法的原理及其在现实应用中的具体案例。
随后,我们将展示如何使用Matlab实现PF算法,并通过实验结果对其性能进行评估和分析。
最后,我们将总结PF算法和Matlab 实现的主要特点,并对未来的发展进行展望。
文章结构的设定在撰写一篇长文时非常重要,它能够为读者提供一个整体的概览,帮助他们更好地理解文章的内容安排。
在MATLAB中使用粒子滤波进行状态估计
在MATLAB中使用粒子滤波进行状态估计Introduction:在许多实时系统或者控制系统中,状态估计是至关重要的一环。
状态估计涉及通过测量数据来推断或估计系统的当前状态。
而粒子滤波(Particle filter)作为一种无模型非线性滤波器,被广泛应用于状态估计问题中。
在本文中,我们将重点介绍如何在MATLAB中使用粒子滤波进行状态估计。
Particle filter基本原理:粒子滤波基于贝叶斯滤波理论,并通过一系列随机样本表示系统的可能状态。
它的基本原理是通过一个粒子集合来近似表示系统状态的概率密度函数。
粒子滤波的核心思想是通过对每个状态进行加权采样来逼近概率密度函数。
粒子的数量越多,逼近的精度就越高,但同时计算量也会增加。
在粒子滤波算法中,每个粒子表示系统的一个假设状态,粒子的权重表示此假设状态的似然度。
而粒子的更新则通过重采样和预测两个步骤来实现。
重采样过程会根据粒子的权重来决定哪些粒子要留下来,而预测过程则通过系统动力学方程来生成新的粒子。
在状态估计问题中,粒子滤波可以通过将传感器测量数据与系统模型相结合,来估计系统的状态。
在MATLAB中使用粒子滤波:使用MATLAB进行粒子滤波非常方便,因为MATLAB提供了强大的工具箱和函数来支持粒子滤波算法,比如Statistics and Machine Learning Toolbox和Sensor Fusion and Tracking Toolbox。
在这里,我们将使用Statistics and Machine Learning Toolbox来进行演示。
步骤一: 初始化粒子集合首先,我们需要根据系统的先验信息,生成一组初始化的粒子。
我们可以根据先验概率密度函数来对粒子赋初值。
```MATLABnumParticles = 1000; % 粒子的数量particleSet = rand(numParticles, 2); % 初始化粒子集合```步骤二: 测量更新接下来,我们需要使用传感器测量数据来对粒子进行加权更新。
粒子滤波PF算法在无线传感器网络定位跟踪的matlab源码
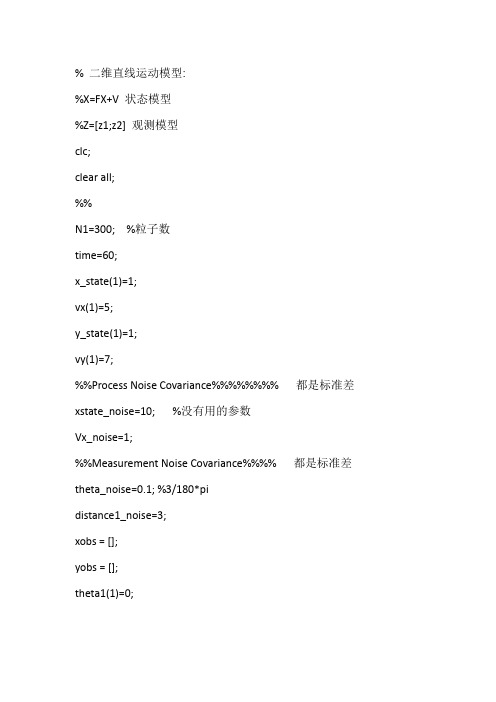
% 二维直线运动模型:%X=FX+V 状态模型%Z=[z1;z2] 观测模型clc;clear all;%%N1=300; %粒子数time=60;x_state(1)=1;vx(1)=5;y_state(1)=1;vy(1)=7;%%Process Noise Covariance%%%%%%%% 都是标准差xstate_noise=10; %没有用的参数Vx_noise=1;%%Measurement Noise Covariance%%%% 都是标准差theta_noise=0.1; %3/180*pidistance1_noise=3;xobs = [];yobs = [];theta1(1)=0;%%Ture State%%%%%%%%for i=2:time%% State model%%%%%%%%%%%accx = normrnd(0,Vx_noise,1,1);x_state(i)=x_state(i-1)+vx(i-1)+0.5*accx;vx(i)=vx(i-1)+accx;accy = normrnd(0,Vx_noise,1,1);y_state(i)=y_state(i-1)+vy(i-1)+0.5*accy;vy(i)=vy(i-1)+accy;end%%Measurement Value%%%%%for i=1:time%%Measure model%%%%%%%%%distance1(i)=sqrt(x_state(i)^2+y_state(i)^2)+distance1_noise*randn(1);%theta1(i)=atan(y_state(i)/x_state(i))+theta_noise*randn(1);%使用下面增加了象限判断的角度计算方式[-pi,pi]if x_state(i)>0 && y_state(i)>=0theta1(i) = atan(y_state(i)/x_state(i))+theta_noise*randn(1) ; %观测方程endif x_state(i)<0 && y_state(i)>=0theta1(i) = (atan(y_state(i)/x_state(i))+pi) +theta_noise*randn(1); %观测方程endif x_state(i)<0 && y_state(i)<=0theta1(i) = (atan(y_state(i)/x_state(i))-pi) +theta_noise*randn(1); %观测方程endif x_state(i)>0 && y_state(i)<=0theta1(i) = atan(y_state(i)/x_state(i)) +theta_noise*randn(1); %观测方程endxobs = [xobs distance1(i)*cos(theta1(i))];yobs = [yobs distance1(i)*sin(theta1(i))];end%%%Particle Filtering%%%%%%%%%%%%%%x_pf(1)=x_state(1);vx_pf(1)=vx(1);y_pf(1)=y_state(1);vy_pf(1)=vy(1);xp1=zeros(1,N1);xp2=zeros(1,N1);xp3=zeros(1,N1);xp4=zeros(1,N1); %%%%%Initial particles 得到初始化的粒子群%%%%%%%%for n=1:N1;%M1=[delta1*randn(1),delta2*randn(1),delta3*randn(1),delta4*randn(1)];%M1=diag(M1);xp1(n)=x_pf(1)+normrnd(0,Vx_noise,1,1);xp2(n)=vx_pf(1)+normrnd(0,Vx_noise,1,1);xp3(n)=y_pf(1)+normrnd(0,Vx_noise,1,1);xp4(n)=vy_pf(1)+normrnd(0,Vx_noise,1,1);end%**filter process*** angel and distance**************** for t=2:time%%%Prediction Process%%%%for n=1:N1accx = normrnd(0,Vx_noise,1,1);xpre_pf(n)=xp1(n)+xp2(n)+0.5*accx;vxpre_pf(n)=xp2(n)+accx;accy = normrnd(0,Vx_noise,1,1);ypre_pf(n)=xp3(n)+xp4(n)+0.5*accy;vypre_pf(n)=xp4(n)+accy;end%%%Calculate Weight Particles%%%%for n=1:N1vhat1=sqrt(xpre_pf(n)^2+ypre_pf(n)^2)-distance1(t);%vhat2=atan(ypre_pf(n)/xpre_pf(n))-theta1(t);%使用下面增加了象限判断的角度计算方式if xpre_pf(n)>0 && ypre_pf(n)>=0ag = atan(ypre_pf(n)/xpre_pf(n)) ; %观测方程endif xpre_pf(n)<0 && ypre_pf(n)>=0ag = (atan(ypre_pf(n)/xpre_pf(n))+pi); %观测方程endif xpre_pf(n)<0 && ypre_pf(n)<=0ag = (atan(ypre_pf(n)/xpre_pf(n))-pi) ; %观测方程endif xpre_pf(n)>0 && ypre_pf(n)<=0ag = atan(ypre_pf(n)/xpre_pf(n)); %观测方程endvhat2=ag-theta1(t);q1=(1/distance1_noise/sqrt(2*pi))*exp(-vhat1^2/2/distance1_noise^2);q2=(1/theta_noise/sqrt(2*pi))*exp(-vhat2^2/2/theta_noise^2);q(n)=q1*q2+1e-99;endq = q./sum(q);P_pf = cumsum(q);%%Resampling Process 这是一种均匀的重采样方法,随机数的产生不再是从[0,1]上任意产生,而是使这个随机数渐进式的增大,与权重累加和一样,都是交替上升,这样的比较更有规律性,更周到%%%%%%%%%%%%%%ut(1)=rand(1)/N1;k = 1;hp = zeros(1,N1);for j = 1:N1ut(j)=ut(1)+(j-1)/N1;while(P_pf(k)<ut(j));k = k + 1;end;hp(j) = k;q(j)=1/N1;end;xp1 = xpre_pf(hp); xp2 = vxpre_pf(hp); % The new particles xp3 = ypre_pf(hp); xp4 = vypre_pf(hp);%% Compute the estimate%%%%%%%%%%%%%x_pf(t)=mean(xp1);y_pf(t)=mean(xp3);end%%%%Result of Tracking%%%%%%%%%%%%% figure;plot(x_state,y_state,'r-*',x_pf,y_pf,'b-o',xobs,yobs,'g-d') xlabel('x state'); ylabel('y state');legend('实际轨迹','滤波轨迹','观测轨迹');set(gcf,'Color','White');%figure;%plot(1:time,distance_error,'r');%legend('distance error');。
粒子滤波MATLAB代码
function ParticleEx1% Particle filter example, adapted from Gordon, Salmond, and Smith paper.x = 0.1; % initial stateQ = 1; % process noise covarianceR = 1; % measurement noise covariancetf = 50; % simulation lengthN = 100; % number of particles in the particle filterxhat = x;P = 2;xhatPart = x;% Initialize the particle filter.for i = 1 : Nxpart(i) = x + sqrt(P) * randn;endjArr = [0];xArr = [x];yArr = [x^2 / 20 + sqrt(R) * randn];xhatArr = [x];PArr = [P];xhatPartArr = [xhatPart];close all;for k = 1 : tf% System simulationx = 0.5 * x + 25 * x / (1 + x^2) + 8 * cos(1.2*(k-1)) + sqrt(Q) * randn;%状态方程y = x^2 / 20 + sqrt(R) * randn;%观测方程% Extended Kalman filterF = 0.5 + 25 * (1 - xhat^2) / (1 + xhat^2)^2;P = F * P * F' + Q;H = xhat / 10;K = P * H' * (H * P * H' + R)^(-1);xhat = 0.5 * xhat + 25 * xhat / (1 + xhat^2) + 8 * cos(1.2*(k-1));%预测xhat = xhat + K * (y - xhat^2 / 20);%更新P = (1 - K * H) * P;% Particle filterfor i = 1 : Nxpartminus(i) = 0.5 * xpart(i) + 25 * xpart(i) / (1 + xpart(i)^2) + 8 * cos(1.2*(k-1)) + sqrt(Q) * randn;ypart = xpartminus(i)^2 / 20;vhat = y - ypart;%观测和预测的差q(i) = (1 / sqrt(R) / sqrt(2*pi)) * exp(-vhat^2 / 2 / R);end% Normalize the likelihood of each a priori estimate.qsum = sum(q);for i = 1 : Nq(i) = q(i) / qsum;%归一化权重end% Resample.重采样for i = 1 : Nu = rand; % uniform random number between 0 and 1qtempsum = 0;for j = 1 : Nqtempsum = qtempsum + q(j);if qtempsum >= uxpart(i) = xpartminus(j);if k == 20qArr=q;jArr = [jArr j];endbreak;endendend% The particle filter estimate is the mean of the particles.xhatPart = mean(xpart);% Plot the estimated pdf's at a specific time.if k == 20% Particle filter pdfpdf = zeros(81,1);for m = -40 : 40for i = 1 : Nif (m <= xpart(i)) && (xpart(i) < m+1)pdf(m+41) = pdf(m+41) + 1;endendendfigure;m = -40 : 40;plot(m, pdf / N, 'r');hold;title('Estimated pdf at k=20');disp(['min, max xpart(i) at k = 20: ', num2str(min(xpart)), ', ', num2str(max(xpart))]);% Kalman filter pdfpdf = (1 / sqrt(P) / sqrt(2*pi)) .* exp(-(m - xhat).^2 / 2 / P);plot(m, pdf, 'b');legend('Particle filter', 'Kalman filter');grid on;end% Save data in arrays for later plottingxArr = [xArr x];yArr = [yArr y];xhatArr = [xhatArr xhat];PArr = [PArr P];xhatPartArr = [xhatPartArr xhatPart];endt = 0 : tf;%figure;%plot(t, xArr);%ylabel('true state');figure;plot(t, xArr, 'b.', t, xhatArr, 'g-.', t, xhatArr-2*sqrt(PArr), 'r:', t, xhatArr+2*sqrt(PArr), 'r:'); axis([0 tf -40 40]);set(gca,'FontSize',12); set(gcf,'Color','White');xlabel('time step'); ylabel('state');legend('True state', 'EKF estimate', '95% confidence region');grid on;figure;plot(t, xArr, 'b.', t, xhatPartArr, 'k-');set(gca,'FontSize',12); set(gcf,'Color','White');xlabel('time step'); ylabel('state');legend('True state', 'Particle filter estimate');grid on;xhatRMS = sqrt((norm(xArr - xhatArr))^2 / tf);xhatPartRMS = sqrt((norm(xArr - xhatPartArr))^2 / tf);disp(['Kalman filter RMS error = ', num2str(xhatRMS)]);disp(['Particle filter RMS error = ', num2str(xhatPartRMS)]);/*qArrtt=max(qArr)t=jArr[m,n]=hist(jArr,100)mnsum(m)。
matlab 滤波器代码
用matlab设计滤波器1.切比雪夫型切比雪夫1型高通2.高通滤波器function y=highp(x,f1,f3,rp,rs,Fs)%高通滤波%使用注意事项:通带或阻带的截止频率的选取范围是不能超过采样率的一半%即,f1,f3的值都要小于Fs/2%x:需要带通滤波的序列% f 1:通带截止频率% f 2:阻带截止频率%rp:边带区衰减DB数设置%rs:截止区衰减DB数设置%FS:序列x的采样频率% rp=0.1;rs=30;%通带边衰减DB值和阻带边衰减DB值% Fs=2000;%采样率%wp=2*pi*f1/Fs;ws=2*pi*f3/Fs;% 设计切比雪夫滤波器;[n,wn]=cheb1ord(wp/pi,ws/pi,rp,rs);[bz1,az1]=cheby1(n,rp,wp/pi,'high');%查看设计滤波器的曲线[h,w]=freqz(bz1,az1,256,Fs);h=20*log10(abs(h));figure;plot(w,h);title('所设计滤波器的通带曲线');grid on;y=filter(bz1,az1,x);end下面是高通滤波器的例子fs=2000;t=(1:fs)/fs;ff1=100;ff2=400;x=sin(2*pi*ff1*t)+sin(2*pi*ff2*t);figure;subplot(211);plot(t,x);subplot(212);hua_fft(x,fs,1);%------高通测试z=highp(x,350,300,0.1,20,fs);figure;subplot(211);plot(t,z);subplot(212);hua_fft(z,fs,1);低通1.低通滤波器使用说明:将下列代码幅值然后以m文件保存,文件名要与函数名相同,这里函数名:lowp。
function y=lowp(x,f1,f3,rp,rs,Fs)%低通滤波%使用注意事项:通带或阻带的截止频率的选取范围是不能超过采样率的一半%即,f1,f3的值都要小于Fs/2%x:需要带通滤波的序列% f 1:通带截止频率% f 3:阻带截止频率%rp:边带区衰减DB数设置%rs:截止区衰减DB数设置%FS:序列x的采样频率% rp=0.1;rs=30;%通带边衰减DB值和阻带边衰减DB值% Fs=2000;%采样率%wp=2*pi*f1/Fs;ws=2*pi*f3/Fs;% 设计切比雪夫滤波器;[n,wn]=cheb1ord(wp/pi,ws/pi,rp,rs);[bz1,az1]=cheby1(n,rp,wp/pi);%查看设计滤波器的曲线[h,w]=freqz(bz1,az1,256,Fs);h=20*log10(abs(h));figure;plot(w,h);title('所设计滤波器的通带曲线');grid on;%y=filter(bz1,az1,x);%对序列x滤波后得到的序列yend--------------------------------------低通滤波器使用例子的代码fs=2000;t=(1:fs)/fs;ff1=100;ff2=400;x=sin(2*pi*ff1*t)+sin(2*pi*ff2*t);figure;subplot(211);plot(t,x);subplot(212);hua_fft(x,fs,1);%低通测试% y=filter(bz1,az1,x);y=lowp(x,300,350,0.1,20,fs);figure;subplot(211);plot(t,y);subplot(212);hua_fft(y,fs,1);%hua_fft()函数是画频谱图的函数,代码在下面给出,要保存为m 文件调用%这段例子还调用了我自己写的专门画频谱图的函数,也给出,不然得不出我的结果%画信号的幅频谱和功率谱%频谱使用matlab例子表示function hua_fft(y,fs,style,varargin)%当style=1,画幅值谱;当style=2,画功率谱;当style=其他的,那么花幅值谱和功率谱%当style=1时,还可以多输入2个可选参数%可选输入参数是用来控制需要查看的频率段的%第一个是需要查看的频率段起点%第二个是需要查看的频率段的终点%其他style不具备可选输入参数,如果输入发生位置错误nfft= 2^nextpow2(length(y));%找出大于y的个数的最大的2的指数值(自动进算最佳FFT步长nfft)%nfft=1024;%人为设置FFT的步长nffty=y-mean(y);%去除直流分量y_ft=fft(y,nfft);%对y信号进行DFT,得到频率的幅值分布y_p=y_ft.*conj(y_ft)/nfft;%conj()函数是求y函数的共轭复数,实数的共轭复数是他本身。
matlab频率滤波代码

matlab频率滤波代码以下是一个简单的MATLAB频率滤波代码示例: matlab.% 读取图像。
img = imread('example.jpg');% 将图像转换为灰度图像。
gray_img = rgb2gray(img);% 计算图像的傅里叶变换。
fft_img = fft2(double(gray_img));% 将零频率分量移到频谱的中心。
fft_img_shifted = fftshift(fft_img);% 设定滤波器。
[M, N] = size(fft_img);R = 10; % 设定滤波器半径。
X = 0:N-1;Y = 0:M-1;[X, Y] = meshgrid(X, Y);Cx = 0.5 N;Cy = 0.5 M;low_pass_filter = double((X-Cx).^2 + (Y-Cy).^2 < R^2); % 应用滤波器。
fft_img_filtered = fft_img_shifted . low_pass_filter;% 将频谱移回原来的位置。
fft_img_filtered_shifted = ifftshift(fft_img_filtered); % 计算逆傅里叶变换。
filtered_img = ifft2(fft_img_filtered_shifted);% 显示原始图像和滤波后的图像。
subplot(1,2,1), imshow(gray_img, []);title('原始图像');subplot(1,2,2), imshow(abs(filtered_img), []);title('滤波后的图像');这段代码首先读取一张图像,然后将其转换为灰度图像。
接着计算图像的傅里叶变换,并将零频率分量移到频谱的中心。
然后设定一个低通滤波器,将其应用于图像的傅里叶变换。
最后计算出滤波后的图像并显示原始图像和滤波后的图像。
粒子滤波及matlab实现
粒子滤波及matlab 实现粒子滤波就是指:通过寻找一组在状态空间中传播的随机样本来近似的表示概率密度函数,用样本均值代替积分运算,进而获得系统状态的最小方差估计的过程,这些样本被形象的称为“粒子” ,故而叫粒子滤波。
粒子滤波通过非参数化的蒙特卡洛 (Monte Carlo) 模拟方法来实现递推贝叶斯滤波,适用于任何能用状态空间模型描述的非线性系统,精度可以逼近最优估计。
粒子滤波器具有简单、易于实现等特点,它为分析非线性动态系统提供了一种有效的解决方法,从而引起目标跟踪、信号处理以及自动控制等领域的广泛关注。
贝叶斯滤波动态系统的目标跟踪问题可以通过下图所示的状态空间模型来描述。
在目标跟踪问题中,动态系统的状态空间模型可描述为x k f(x k 1) u k 1 y k h(x k ) v k其中f ( ), h( )分别为状态转移方程与观测方程,x k 为系统状态,y k 为观测值,u k为过程噪声,v k 为观测噪声。
为了描述方便,用X k x0:k {x0,x1, ,x k} 与Y k y1:k {y1, , y k}分别表示0到k时刻所有的状态与观测值。
在处理目标跟踪问题时,通常假设目标的状态转移过程服从一阶马尔可夫模型,即当前时刻的状态x k 只与上一时刻的状态x k-1有关。
另外一个假设为观测值相互独立,即观测值y k只与k时刻的状态x k有关。
贝叶斯滤波为非线性系统的状态估计问题提供了一种基于概率分布形式的解决方案。
贝叶斯滤波将状态估计视为一个概率推理过程,即将目标状态的估计问题转换为利用贝叶斯公式求解后验概率密度p(X k |Y k )或滤波概率密度p(x k |Y k ) ,进而获得目标状态的最优估计。
贝叶斯滤波包含预测和更新两个阶段, 预测过程利用系统模型预测状态的先验概率密度, 新过程则利用最新的测量值对先验概率密度进行修正,得到后验概率密度。
假设已知 k 1时刻的概率密度函数为 p(x k 1|Y k 1 ) ,贝叶斯滤波的具体过程如下:(1)预测过程,由 p(x k 1|Y k 1) 得到 p(x k |Y k 1):p( x k , x k 1|Y k 1) p(x k | x k 1,Y k 1)p(x k 1|Y k 1)当给定 x k 1时,状态 x k 与 Y k 1相互独立,因此p(x k ,x k 1|Y k 1) p(x k |x k 1)p(x k1|Y k 1)上式两端对 x k 1 积分,可得 Chapman-Komolgorov 方程p(x k |Y k 1) p(x k |x k 1)p(x k 1|Y k 1)dx k 1(2)更新过程,由 p(x k |Y k 1)得到 p(x k |Y k ):获取 k 时刻的测量 y k 后,利用贝叶斯公式对先验概率密度进行更新,得到后验概率p(y k |x k ,Y k 1)p(x k |Y k 1) p( y k |Y k 1) 假设 y k 只由 x k 决定,即p(y k |x k ,Y k 1) p(y k |x k )因此p(y k |x k )p(x k |Y k 1) p(y k |Y k 1)其中, p(y k |Y k 1) 为归一化常数 p(y k |Y k 1) p(y k |x k )p(x k |Y k 1)dx k贝叶斯滤波以递推的形式给出后验 (或滤波 ) 概率密度函数的最优解。
粒子滤波算法简介与matlab程序
粒子滤波作者-niewei120——nuaaBayes法则:贝叶斯定理由英国数学家贝叶斯( Thomas Bayes 1702-1763 ) 发展,用来描述两个条件概率之间的关系,比如P(A|B) 和P(B|A)。
按照乘法法则:P(A∩B)=P(A)*P(B|A)=P(B)*P(A|B),可以立刻导出贝叶斯定理公式:P(A|B)=P(B|A)*P(A)/P(B)。
通常,事件A在事件B(发生)的条件下的概率,与事件B在事件A的条件下的概率是不一样的;然而,这两者是有确定的关系,贝叶斯法则就是这种关系的陈述。
Pr(A)是A的先验概率或边缘概率。
之所以称为"先验"是因为它不考虑任何B方面的因素。
Pr(A|B)是已知B发生后A的条件概率,也由于得自B的取值而被称作A的后验概率。
Pr(B|A)是已知A发生后B的条件概率,也由于得自A的取值而被称作B的后验概率。
Pr(B)是B的先验概率或边缘概率,也作标准化常量(normalized constant)。
先验概率的计算比较简单,没有使用贝叶斯公式;而后验概率的计算,要使用贝叶斯公式。
若用Pr(B|A)/Pr(B)表示标准似然度,则后验概率= 标准似然度* 先验概率。
例子:一座别墅在过去的20 年里一共发生过 2 次被盗,别墅的主人有一条狗,狗平均每周晚上叫 3 次,在盗贼入侵时狗叫的概率被估计为0.9,问题是:在狗叫的时候发生入侵的概率是多少?我们假设A 事件为狗在晚上叫,B 为盗贼入侵,则P(A) = 3 / 7,P(B)=2/(20·365)=2/7300,P(A | B) = 0.9,按照公式很容易得出结果:P(B|A)=0.9*(2/7300)/(3/7)=0.00058贝叶斯决策理论方法基本思想是:1、已知类条件概率密度参数表达式和先验概率。
2、利用贝叶斯公式转换成后验概率。
3、根据后验概率大小进行决策分类。
贝叶斯滤波的核心思想就是利用已知的信息来判断状态变量的后验概率,在目标跟踪中也就是对所有观测值Z1:Zk={Z1,Z2…Zk}已知的情况下,计算出后验概率P(Xk|Z1:k),其计算的方法具体分为预测和更新。
粒子滤波算法原理及Matlab程序(专题)
更新粒子权重
03
根据权重调整因子和似然函数更新粒子的权重。
03 Matlab实现粒子滤波算 法
Matlab编程环境介绍
01
MATLAB是一种高级编程语言和交互式环境,广泛应用于算法 开发、数据可视化、数据分析以及数值计算。
02
MATLAB提供了大量的内置函数和工具箱,使得用户可以方便
地实现各种算法和计算任务。
新应用领域探索
拓展粒子滤波算法在人工智能、机器学习等 领域的应用。
Байду номын сангаас
与其他算法结合
结合深度学习、强化学习等先进算法,提高 粒子滤波的性能和适应性。
实时性研究
优化算法实现,提高粒子滤波在实时系统中 的应用效果。
THANKS FOR WATCHING
感谢您的观看
end
02
% 可视化结果
03
plot(z);
04
```
Matlab实现代码的解读与理解
在上述代码中,我们首先定义了一些参数,包括粒子数量N、初始状态x和初始状态误差协方差矩阵P 。我们还定义了模拟动态系统的参数,包括状态转移矩阵A、控制输入矩阵B、过程噪声协方差矩阵Q 和测量噪声协方差矩阵R。我们还定义了真实状态x_true和控制输入u。
实验方法
采用对比实验、重复实验等方法,对算法性能进行客 观评估。
粒子滤波算法的性能优化
参数调整
根据实际应用需求和实验结果,调整算法参 数以优化性能。
算法改进
针对算法的不足之处进行改进,以提高性能 和鲁棒性。
并行计算
采用并行计算技术,提高算法的计算效率。
05 粒子滤波算法的改进与拓 展
粒子滤波算法的改进方向
matlab filter函数源代码

matlab filter函数源代码MATLAB中的filter函数是一个非常常用的信号处理函数,它可以实现对信号进行滤波操作。
滤波是信号处理的重要环节之一,它可以去除信号中的噪声以及其他不需要的成分,使得信号更加清晰和准确。
在MATLAB中,filter函数的源代码如下所示:```matlabfunction y = filter(b, a, x)% 输入参数b为滤波器的分子系数,a为滤波器的分母系数,x 为输入信号% 输出参数y为滤波后的信号N = max(length(b), length(a)); % 滤波器的阶数b = [b, zeros(1, N-length(b))]; % 分子系数补零a = [a, zeros(1, N-length(a))]; % 分母系数补零M = length(x); % 输入信号的长度y = zeros(1, M); % 初始化输出信号for n = 1:Mfor k = 1:Nif n-k+1 > 0y(n) = y(n) + b(k)*x(n-k+1);endendfor k = 2:Nif n-k+1 > 0y(n) = y(n) - a(k)*y(n-k+1);endendy(n) = y(n)/a(1);endend```上述代码中,filter函数接受三个输入参数:分子系数b、分母系数a和输入信号x。
其中,分子系数和分母系数用于定义滤波器的传递函数,而输入信号则是待滤波的信号。
函数的输出参数为滤波后得到的信号y。
在代码的实现过程中,首先通过比较分子系数b和分母系数a的长度,确定滤波器的阶数N。
然后,根据阶数N对分子系数和分母系数进行补零操作,使得它们的长度一致。
接下来,通过两个嵌套的for循环遍历输入信号x的每一个样本点,并根据滤波器的差分方程进行滤波操作。
其中,第一个for循环用于计算输出信号y的累加和,第二个for循环用于计算输出信号y的递推和。
粒子滤波原理及应用matlab仿真

粒子滤波原理及应用matlab仿真一、引言粒子滤波(Particle Filter)是贝叶斯滤波(Bayesian Filter)的一种扩展,用于解决非线性和非高斯问题。
它是一种基于蒙特卡罗方法的状态估计算法,可以用于目标跟踪、机器人定位、信号处理等领域。
本文将详细介绍粒子滤波的原理及其在matlab中的应用。
二、贝叶斯滤波贝叶斯滤波是一种基于贝叶斯定理的概率推断方法,用于估计状态变量在给定观测值下的后验概率分布。
其核心思想是将先验概率分布和观测数据结合起来,得到后验概率分布。
具体地,在时间步k时刻,假设状态变量为x(k),观测变量为y(k),则根据贝叶斯定理:P(x(k)|y(1:k)) = P(y(k)|x(k)) * P(x(k)|y(1:k-1)) / P(y(k)|y(1:k-1))其中,P(x(k)|y(1:k))表示在已知前k个观测值下x(k)的后验概率分布;P(y(k)|x(k))表示在已知x(k)时y(k)的条件概率分布,也称为似然函数;P(x(k)|y(1:k-1))表示在已知前k-1个观测值下x(k)的先验概率分布;P(y(k)|y(1:k-1))表示前k-1个观测值的边缘概率分布。
三、粒子滤波基本原理粒子滤波是一种基于贝叶斯滤波的蒙特卡罗方法,它通过在状态空间中随机采样一组粒子来近似表示后验概率分布。
每个粒子都代表一个可能的状态变量,其权重反映了该状态变量与观测值之间的匹配程度。
具体地,在时间步k时刻,假设有N个粒子{ x(1), x(2), ..., x(N) },则每个粒子都有一个对应的权重w(i),且满足:∑ w(i) = 1根据贝叶斯定理可得:P(x(k)|y(1:k)) = P(y(k)|x(k)) * P(x(k)|y(1:k-1)) / P(y(k)|y(1:k-1))其中,P(y(k)|x(k))和P(x(k)|y(1:k-1))可以通过系统模型和观测模型计算得到。
正则化粒子滤波代码

正则化粒子滤波代码import numpy as npclass ParticleFilter:"""设置默认粒子数量为1000,默认正态分布精度为1e-5"""def __init__(self, n_p=1000, delta=1e-5):self.N_p = n_p # 粒子个数self.delta = delta # 正态分布精度def init_particles(self, init_x, init_y, std: tuple, seed=None): """生成初始粒子:param std: 正态分布参数(均值,标准差):return:"""np.random.seed(seed)# (x维度, y维度, 粒子个数)self.particles = np.random.randn(2, self.N_p)self.particles[0] *= std[0] * self.deltaself.particles[1] *= std[1] * self.deltaself.particles[0] += init_xself.particles[1] += init_ydef motion_update(self, x, y, std: tuple, f=[1, 1], seed=None): """运动更新:param x: 传感器测量位置的x坐标:param y: 传感器测量位置的y坐标:param std: 正态分布参数:param f: 运动模型参数(默认为[1, 1]):return: None"""np.random.seed(seed)self.particles[0] = self.particles[0]*f[0] +np.random.randn(self.N_p)*std[0]*self.deltaself.particles[1] = self.particles[1]*f[1] +np.random.randn(self.N_p)*std[1]*self.deltaself.particles[0] += xself.particles[1] += ydef calculate_weight(self, obs_x, obs_y, std: tuple):"""计算粒子权重:param obs_x: 传感器测量位置的x坐标:param obs_y: 传感器测量位置的y坐标:param std: 正态分布参数:return: None"""dist = (self.particles[0] - obs_x) ** 2 + (self.particles[1] - obs_y) ** 2self.weight =np.exp(-dist/(2*std[0]**2))+np.exp(-dist/(2*std[1]**2))self.weight /= sum(self.weight)def resampling(self, seed=None):"""重采样:return: None"""np.random.seed(seed)index = np.random.choice(self.N_p, size=self.N_p, replace=True, p=self.weight)self.particles = self.particles[:, index]。
二维粒子滤波纯代码

⼆维粒⼦滤波纯代码% 参数设置N = 100; %粒⼦总数Q = 5; %过程噪声R = 5; %测量噪声T = 20; %测量时间theta = pi/T; %旋转⾓度distance = 80/T; %每次⾛的距离WorldSize = 100; %世界⼤⼩X = zeros(2, T); %存储系统状态Z = zeros(2, T); %存储系统的观测状态P = zeros(2, N); %建⽴粒⼦群PCenter = zeros(2, T); %所有粒⼦的中⼼位置w = zeros(N, 1); %每个粒⼦的权重err = zeros(1,T); %误差X(:, 1) = [50; 20]; %初始系统状态%wgn(m,n,p)产⽣⼀个m⾏n列的⾼斯⽩噪声的矩阵,p以dBW为单位指定输出噪声的强度。
Z(:, 1) = [50; 20] + wgn(2, 1, 10*log10(R)); %初始系统的观测状态%初始化粒⼦群for i = 1 : NP(:, i) = [WorldSize*rand; WorldSize*rand];%在worldSize区域内随机⽣成N个粒⼦dist = norm(P(:, i)-Z(:, 1)); %与测量位置相差的距离,⽤于估算该粒⼦的权重%由于上⾯已经随机⽣成了N个粒⼦,现在将其与真实的测量值z进⾏⽐较,越接近则权重越⼤,或者说差值越⼩权重越⼤%这⾥的权重计算是关于p(z/x)的分布,即观测⽅程的分布,假设观测噪声满⾜⾼斯分布,那么w(i)=p(z/x)w(i) = (1 / sqrt(R) / sqrt(2 * pi)) * exp(-(dist)^2 / 2 / R); %求权重endPCenter(:, 1) = sum(P, 2) / N; %所有粒⼦的⼏何中⼼位置%%err(1) = norm(X(:, 1) - PCenter(:, 1)); %粒⼦⼏何中⼼与系统真实状态的误差figure(1);%利⽤set(gca,'propertyname','propertyvalue'......)命令可以调整图形的坐标属性。
一维粒子滤波纯代码

⼀维粒⼦滤波纯代码%⼀维粒⼦滤波代码%状态⽅程:x(k)=x(k-1)/2+25*x(k-1)/(1+x(k-1)^2)+8cos(1.2(k-1))+vk;vk为噪声%测量⽅程:y(k)=x(k)^2/20+nk;nk为噪声%初始化时的状态x0=0.1;%过程噪声的协⽅差,且其均值为0Q=1;%测量噪声的协⽅差,且其均值为0R=1;%仿真步数simu_steps=70;%粒⼦滤波中的粒⼦数N=100;%初始化分布的⽅差V=2;%初始化粒⼦滤波的估计值与初始状态⼀致x_estimate=x0;%⽤⼀个⾼斯分布随机的产⽣初始的粒⼦%randn产⽣标准正太分布的随机数,其实它就是在x状态附近做⼀个随机样本抽样的过程,在这⾥x为均值,P为⽅差for i=1 : N%⽤于存储当前采样到的粒⼦集的数组current_particle(i)=x0+sqrt(V)*randn;end%⽤于存储系统状态⽅程计算得到的每⼀步的状态值,此为数组x_state=[x0];%⽤于存储量测⽅程计算得到的每⼀步的状态值,也为数组y_measure=[x0^2/20+sqrt(R)*randn];%⽤于记录粒⼦滤波每⼀步估计的粒⼦均值(该均值即为对对应步状态的估计值),此为⼀个数组x_estimate_Arr=[x_estimate];%close all 是关闭所有窗⼝(程序运⾏产⽣的,不包括命令窗,editor窗和帮助窗)close all;%为⽅便下⾯进⾏for循环,⽽不⽤使⽤变量x0x=x0;for k=1:simu_steps%从状态⽅程当中获取下⼀时刻的状态值(称为预测)x=0.5*x+25*x/(1+x^2)+8*cos(1.2*(k-1))+sqrt(Q)*randn;%在当前状态下,通过观测⽅程获取的观测量的值y=x^2/20+sqrt(R)*randn;for i=1 : N%从先验分布(在这⾥当做粒⼦滤波中的重要性分布)p(x(k)|x(k-1))中采样,利⽤之前⽣成的粒⼦样本集current_particle(i)带⼊状态⽅程中,记做数组next_particle(i) next_particle(i) = 0.5 * current_particle(i)+25 * current_particle(i) / (1+(current_particle(i))^2)+8 * cos(1.2 * (k-1)) + sqrt(Q) * randn;%已经采样到了新的粒⼦,那么如何来计算每个粒⼦的权重呢,那么肯定要与观测量有关系,则将新的样本粒⼦中的粒⼦分别带⼊观测⽅程当中%计算出通过该粒⼦⽽预测出该粒⼦的量测值y_measure_particle=next_particle(i)^2/20;%由于上⾯已经计算出第i个粒⼦,带⼊观测⽅程后的预测值,现在与真实的测量值y进⾏⽐较,越接近则权重越⼤,或者说差值越⼩权重越⼤%这⾥的权重计算是关于p(y/x)的分布,即观测⽅程的分布,假设观测噪声满⾜⾼斯分布,那么particle_w=p(y/x)particle_w(i)=(1/sqrt(2*pi*R))*exp(-(y-y_measure_particle)^2/(2*R));end%将权值归⼀化,符号./是指两个矩阵对应元素相除,现在权值particle_w已经归⼀化了particle_w=particle_w./sum(particle_w);%下⾯进⾏重采样for i=1:N%⽤rand函数来产⽣在0到1之间服从均匀分布的随机数,⽤于找出归⼀化后权值较⼤的粒⼦u=rand;%在这⾥归⼀化后的权值太⼩了,很难单个粒⼦的权值会⼤于u=rand产⽣的随机数,这⾥⽤累加的⽅式来获得具有较⼤权值的粒⼦%临时权值求和变量particle_w_sumparticle_w_sum=0;for j=1:Nparticle_w_sum=particle_w_sum+q(j);%如果particle_w_sum⼤于等于u,则将该权值的粒⼦保留下来if particle_w_sum>=ucurrent_particle(i)=next_particle(i);%如果找到这样的⼤权值粒⼦,则退出,寻找下⼀个粒⼦,别忘了,在每⼀次寻找粒⼦的时候,都是从头到尾的%故可能会保留到重复的粒⼦,所以在这⾥容易造成粒⼦样本枯竭,即粒⼦的多样性失去,只剩下⼀个⼤的粒⼦,在不断的复制⾃⼰break;endendend%粒⼦滤波的状态估计,利⽤重采样以后的粒⼦计算其均值,那么得到的这个均值就是当前步粒⼦滤波对状态的估计值%x_estimate=mean(current_particle);怀疑取均值是错的,应该各粒⼦的权值乘以对应粒⼦值相加,才是粒⼦滤波的估计值x_estimate=sum(current_particle .* particle_w);%将上⾯的数据保存下来,以便之后的绘图%这是记录状态每⼀步值的数组,始终将新产⽣的x值插⼊数组x_state=[x_state x];%记录测量值的数组,始终将新产⽣的y值插⼊数组y_measure=[y_measure y];%⽤于记录粒⼦滤波每⼀步估计的粒⼦均值(该均值即为对对应步状态的估计值),此为⼀个数组x_estimate_Arr=[x_estimate_Arr x_estimate]; end%下⾯画图t=0:simu_steps;%figurefigure(1);clfplot(t,x_state,'b.', t, x_estimate_Arr, 'k-');set(gca,'FontSize',12);set(gcf,'Color','White');xlabel('time step');ylabel('state');legend('True state','Particle filter estimate');。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
function ParticleEx1
% Particle filter example, adapted from Gordon, Salmond, and Smith paper.
x = 0.1; % initial state
Q = 1; % process noise covariance
R = 1; % measurement noise covariance
tf = 50; % simulation length
N = 100; % number of particles in the particle filter
xhat = x;
P = 2;
xhatPart = x;
% Initialize the particle filter.
for i = 1 : N
xpart(i) = x + sqrt(P) * randn;
end
jArr = [0];
xArr = [x];
yArr = [x^2 / 20 + sqrt(R) * randn];
xhatArr = [x];
PArr = [P];
xhatPartArr = [xhatPart];
close all;
for k = 1 : tf
% System simulation
x = 0.5 * x + 25 * x / (1 + x^2) + 8 * cos(1.2*(k-1)) + sqrt(Q) * randn;%状态方程
y = x^2 / 20 + sqrt(R) * randn;%观测方程
% Extended Kalman filter
F = 0.5 + 25 * (1 - xhat^2) / (1 + xhat^2)^2;
P = F * P * F' + Q;
H = xhat / 10;
K = P * H' * (H * P * H' + R)^(-1);
xhat = 0.5 * xhat + 25 * xhat / (1 + xhat^2) + 8 * cos(1.2*(k-1));%预测
xhat = xhat + K * (y - xhat^2 / 20);%更新
P = (1 - K * H) * P;
% Particle filter
for i = 1 : N
xpartminus(i) = 0.5 * xpart(i) + 25 * xpart(i) / (1 + xpart(i)^2) + 8 * cos(1.2*(k-1)) + sqrt(Q) * randn;
ypart = xpartminus(i)^2 / 20;
vhat = y - ypart;%观测和预测的差
q(i) = (1 / sqrt(R) / sqrt(2*pi)) * exp(-vhat^2 / 2 / R);
end
% Normalize the likelihood of each a priori estimate.
qsum = sum(q);
for i = 1 : N
q(i) = q(i) / qsum;%归一化权重
end
% Resample.重采样
for i = 1 : N
u = rand; % uniform random number between 0 and 1
qtempsum = 0;
for j = 1 : N
qtempsum = qtempsum + q(j);
if qtempsum >= u
xpart(i) = xpartminus(j);
if k == 20
qArr=q;
jArr = [jArr j];
end
break;
end
end
end
% The particle filter estimate is the mean of the particles.
xhatPart = mean(xpart);
% Plot the estimated pdf's at a specific time.
if k == 20
% Particle filter pdf
pdf = zeros(81,1);
for m = -40 : 40
for i = 1 : N
if (m <= xpart(i)) && (xpart(i) < m+1)
pdf(m+41) = pdf(m+41) + 1;
end
end
end
figure;
m = -40 : 40;
plot(m, pdf / N, 'r');
hold;
title('Estimated pdf at k=20');
disp(['min, max xpart(i) at k = 20: ', num2str(min(xpart)), ', ', num2str(max(xpart))]);
% Kalman filter pdf
pdf = (1 / sqrt(P) / sqrt(2*pi)) .* exp(-(m - xhat).^2 / 2 / P);
plot(m, pdf, 'b');
legend('Particle filter', 'Kalman filter');
grid on;
end
% Save data in arrays for later plotting
xArr = [xArr x];
yArr = [yArr y];
xhatArr = [xhatArr xhat];
PArr = [PArr P];
xhatPartArr = [xhatPartArr xhatPart];
end
t = 0 : tf;
%figure;
%plot(t, xArr);
%ylabel('true state');
figure;
plot(t, xArr, 'b.', t, xhatArr, 'g-.', t, xhatArr-2*sqrt(PArr), 'r:', t, xhatArr+2*sqrt(PArr), 'r:'); axis([0 tf -40 40]);
set(gca,'FontSize',12); set(gcf,'Color','White');
xlabel('time step'); ylabel('state');
legend('True state', 'EKF estimate', '95% confidence region');
grid on;
figure;
plot(t, xArr, 'b.', t, xhatPartArr, 'k-');
set(gca,'FontSize',12); set(gcf,'Color','White');
xlabel('time step'); ylabel('state');
legend('True state', 'Particle filter estimate');
grid on;
xhatRMS = sqrt((norm(xArr - xhatArr))^2 / tf);
xhatPartRMS = sqrt((norm(xArr - xhatPartArr))^2 / tf);
disp(['Kalman filter RMS error = ', num2str(xhatRMS)]);
disp(['Particle filter RMS error = ', num2str(xhatPartRMS)]);
/*qArr
tt=max(qArr)
t=jArr
[m,n]=hist(jArr,100)
m
n
sum(m) 完!。