包装机推包机构运动方案设计
【精品】包装机推包机构

文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持.【关键字】精品编号毕业设计(论文)包装机推包机构设计煤矿机电系机电设备维修与管理专业学号:1103617学生姓名:宁营营指导教师:刘立群摘要包装机是一个产品生产和外包的机器的统称,其主要功能是包装各种产品,而包装机推包机构则是给包装机提供包装产品的机构,其主要功能就是从生产线将产品输送到包装机的相应入口,推包机构的运动是一个按一定轨迹的循环往复运动。
它推送物品到达指定包装工作台,该机构取代了传统的人工移动物品,改善了工作效率低的缺点。
本文所设计的推包机构,有回程一体的全自动化功能,其主要设计思路来自于对传统工艺的分解,然后按照相应功能的机构部件进行设计,对比,选定,以及优化组合。
综合利用凸轮的往复运动,齿轮的传动运动,以及减速器的定值调速比的设定。
再利用Auto Cad 软件强大绘图功能,和Word的编辑功能,把设计方案图文并茂的展现出来。
对推包机构则采用偏置滑块机构与盘形凸轮机构的组合机构相结合。
其中,偏置滑块机构控制推头的水平方向上运动,凸轮机构则控制推头垂直方向的运动。
在本设计中,在推头回程过程中不影响下一个工件的到来,从而总体来讲提高了效率。
关键词:包装机;推包机构;减速机;齿轮AbstractPacking machine is a machine of a production and outsourcing collectively, Its main function is the packaging of various products, However, the packaging machine push package body is the institutions of packaging products, packaging machine, Its main function is to transport products from the production line to the corresponding entry of the packaging machine, the agency's movement is a movement of the cycle by a certain trajectory. The agency push items arrived at the designated packing table, the agency replaces the traditional manual movable objects inefficiency.I designed the push package institution push package, return one of the fully automated, its main design ideas comes from the decomposition of traditional technology,then designed follow the corresponding function body parts, contrast, selected, and optimized. The use of the cam reciprocates, the movement of the gear drive, and the set value of the speed ratio of the reducer. The use of the powerful drawing features Auto Cad software and Word editing features, design illustrated, lifelike. In this system, laser sensor packaging work piece to push package institutions controlled by the microcontroller. In this design, in the return process it does not affect the arrival of the next work piece, and thus in general, to improve efficiency.Key words: packing machine; push institution; reducer; gear目录1 绪论包装机械是指能完成全部或部分包装过程的机器。
块状物品推送机的机构综合与机构设计
机械原理课程设计设计说明书设计题目:块状物品推送机的机构综合与机构设计班级:11机械本2姓名:学号:指导教师:完成时间:2013年07月03日一 .设计题目:块状物品推送机的机构综合与机构设计在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置。
1.1设计数据和要求:1.推送的距离H=120mm,生产率为每分钟推送物品120件。
2.推送机的原动件为同步转速为3000r/min的三相交流电动机,通过减速装置带动执行机构主动件等速转动。
3.由物品处于最高位置是开始,当执行机构主动件转过150°时,推杆从最低位置运动到最高位置,当主动件再转过120°时,推杆从最高位置又回到最低位置,最后当主动件再转过90°时,推杆在最低位置保持静止。
4.设推杆在上升过程中所受到的物品中立和摩擦力为常数,其大小为500N,推杆在下降过程中所受到的摩擦力为常数,大小为100N。
5.使用寿命为10年,每年工作300个工作日,每个工作日工作16小时。
6.在满足行程的条件下,要求推送机的效率较高(推诚的最大压力角应小于35°),结构紧凑,震动噪音小。
二 .实现推送机推送要求的执行机构方案选定2.1实现推送机推送要求的执行机构设计方案方案一凸轮-连杆组合机构如上图所示的凸轮-连杆组合机构也可以实现行程放大功能,在水平面得推送任务中,优势较明显,但在垂直面中就会与机架产生摩擦,加上凸轮与摆杆和摆杆与齿条的摩擦,积累起来,摩擦会很大,然后就是其结构较为复杂,非标准件较多,加工难度比较大,从而生产成本也比较大,连杆机构上端加工难度大,而且选材时,难以找到合适的材料,使其既能满足强度刚度条件又廉价,因此不宜选择该机构来实现我们的设计目的。
方案二如上图所示的凸轮机构,凸轮以等角速度回转,它的轮廓驱使从动件,可使推杆实现任意的运动规律,但是使用凸轮机构磨损较为严重,滚子不能很好的紧贴凸轮,容易振动,运行时稳定性能差,由于摩擦较大,动力使用效率不高,造成能源浪费,不能到达环保节能的目的,不能满足设计要求。
机械原理课程设计方案书设计方案书题目
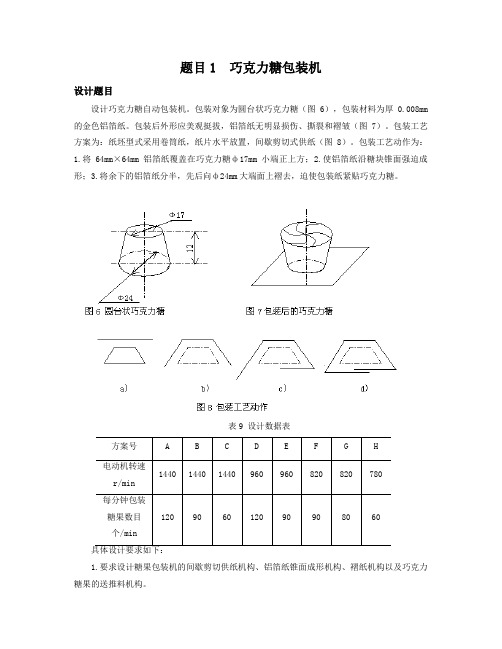
题目1 巧克力糖包装机设计题目设计巧克力糖自动包装机。
包装对象为圆台状巧克力糖(图6),包装材料为厚0.008mm 的金色铝箔纸。
包装后外形应美观挺拔,铝箔纸无明显损伤、撕裂和褶皱(图7)。
包装工艺方案为:纸坯型式采用卷筒纸,纸片水平放置,间歇剪切式供纸(图8)。
包装工艺动作为:1.将64mm×64mm铝箔纸覆盖在巧克力糖ф17mm小端正上方;2.使铝箔纸沿糖块锥面强迫成形;3.将余下的铝箔纸分半,先后向ф24mm大端面上褶去,迫使包装纸紧贴巧克力糖。
表9 设计数据表1.要求设计糖果包装机的间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力糖果的送推料机构。
2.整台机器外形尺寸(宽×高)不超过800mm×1000mm。
3.锥面成形机构不论采用平面连杆机构、凸轮机构或者其他常用机构,要求成形动作尽量等速,起动与停顿时冲击小。
设计任务1)按工艺动作要求拟定运动循环图。
2)进行间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力糖果的送推料机构选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择。
4)按选定的电动机和执行机构运动参数拟定机械传动方案。
5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
设计提示1. 剪纸与供纸动作连续完成。
2.铝箔纸锥面成形机构一般可采用凸轮机构、平面连杆机构等。
3.实现褶纸动作的机构有多种选择:包括凸轮机构、摩擦滚轮机构等。
4.巧克力糖果的送推料机构可采用平面连杆机构、凸轮机构。
5.各个动作应有严格的时间顺序关系。
题目02:自动打印机设计方案与分析1、工作原理及工艺动作过程对于包装好的纸盒上,为了商品某种需要而打印一种记号。
它的动作主要有三个:送料到达打印工位。
然后打印记号。
最后将产品输出。
包装机推包机构综合题目

机械原理设计任务书
学生姓名苟现敏班级2008级机电2班学号20087664
设计题目:包装机推包机构综合
一、设计题目简介
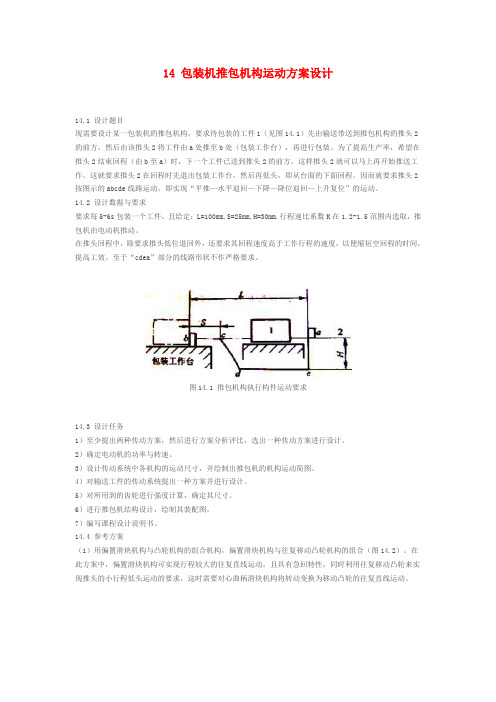
现需设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工件。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcdea 线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
图1 推包机构执行构件运动要求
二、设计数据与要求
要求每10-12秒钟包装一个工件,且给定:L=80mm,S=30mm,H=20mm。
行程速比系数K在1.2~1.5范围内选取,推包机由电动机驱动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回行程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
三、设计任务
1、至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;
2、确定电动机的功率与转速;
3、设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图;
4、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
5、图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说明书。
完成日期:年月日指导教师。
包装机械的供送装置、机构与设计.pptx

如图2.9(c),经单个或多个料槽输入的物件散落到锥 形转盘上方被支架固连的螺旋栏板内,因受盘面摩擦力的作用 使之不断加速向外圈转移,并形成定向排列。最后由输送带送 至指定工位。适合圆柱形和长方体形硬质物件,如圆头平键、 糖块等物
(d)槽盘式给料器
如图表2.9(d),利用宽皮带加料,然后让落到转盘上 的物块沿着静止的齿形螺旋导板自动地按其长轴进行定向 排列,待滑进转盘周边的凹槽内后,便按其厚度再一次进行 定向排列。在这个过程中,物块所受的挤压力甚微,能防止 变形破坏。为增大盘面中部的速差以提高工艺效果,有的 将整体式转盘改成差动的双套式结构。适合长方体形软质 物件,如巧克力、饴糖等物料的供送。
在摆杆11上滑动,使摆杆11摆动 来带动活塞移动。丝杠8可 调节摆杆10上套筒的位置, 以改变活塞行程。
(a)成型式机构
(b)截料活塞式机构
1 —料斗 2—双联螺旋 3—细腰转鼓
1-料斗 2-螺旋刮刀 3-圆筒机壳 4-异形旋 塞 5-出料弯头 6,10,11,16-连杆 8-丝杆
4—成型转台5—推料活塞 6—出料转 7.9-凸轮 12-活塞 13-扇形齿轮 14-齿条
及高粘度物料。
低粘度物料多属牛顿型流体,这种物料通常在重力 作用下就可沿管道或溜槽流动,如液体饮料、牛奶、食 用植物油等。高粘度物料一般多属于非牛顿型流体,其 流动的基本特证是其剪切力与剪切速率不成正比,即其 粘度不是常数,而是随剪切速率的增加而下降。
二、典型供送机构
1.成型式供送机构
如图2.10(a)所示
第二章 供送装置
主要内容: 掌握块状、散体、流体物料的供 送机构的工作原理。
第二章 供送装置
供送装置是包装设备的重要组成部分,其结构及工作性能 决定着设备的自动化水平及生产率,并影响着设备的总体 布局。
作往复运动的裹包执行机构的设计
c sin 2m
1m
2arctg( d
2
c cos
2m
)
(6-9)
2
1
1m
2
arctg( d
c
sin(
2m
2
c
cos(
2m
2
2)
2
)
)
(6-10)
式中: e—从动杆的A点与直 动执行构件滚子中心B的运 动轨迹线之间的距离;
显然,当时 d 90,该机构将产生自锁。
假定从动杆与其导轨之间没有摩擦,即 d 0 ,则
1
P0 cos Q
这样,可粗略地求出该机构的传动效率η为
P0 P
1 tgtg d
1
式中:ξ—损失系数,其许用值用[ξ]表示。
欲保证机构有合理的传动效率通常,可取
tgtg d []
(6-17)
(6-18)
(6-9)
(6-19)
(6-20)
若用K表示推力系数,则 K P cos d 1 ( / tg d )2
Q cos( d )
r1
上述参数通常是按凸轮许用压力角确定的,推程运
动的许用压力角一般可取30°。在实践中,这种凸轮机
构,往往压力角并未超过许用值而推力系数(凸轮对直动
从动杆的推力与从动杆所承受的载荷的比值)却很大甚
至自锁的情况时有发生;也有凸轮压力角超过许用值而
工作情况却良好。所以,按许用压力角确定其参数,是不
(整理)全自动本打包机的推机构设计毕业设计
毕业设计(论文)题目全自动书本打包机的推书机构设计系别航空与机械工程系专业名称机械设计制造及其自动化班级学号学生姓名指导教师毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日学士学位论文原创性声明本人声明,所呈交的论文是本人在导师的指导下独立完成的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含法律意义上已属于他人的任何形式的研究成果,也不包含本人已用于其他学位申请的论文或成果。
打包机械推书机构的创新设计及运动仿真

[ 3] 薛文斌, 邓志威, 来永春, 等. 铝微弧氧化电流效 率的测定[ J] . 电镀与装饰, 1998, 5( 1) .
6结论
[ 4] 辛铁柱. 铝、镁、钛合金微弧氧化表面处理技术[ J] . 电加工与模具, 2004, 增刊.
包装与食品机械 2008 年第 26 卷第 4 期
打包机械推书机构的创新设计及运动仿真%
宋梅利 1, 王华坤 1, 尹雷 2 ( 1.南京理工大学机械工程学院, 南京 210094; 2.山东信远集团, 山东 莱阳 265200)
摘要: 利用计算机辅助设计软件对包装机械纵向推书机构实现创新设计及仿真分析, 根 据工作要求设计了该机构的主要尺寸, 用解析法确定了凸轮轮廓曲线方程, 并在 Matlab 软件 中设计绘制凸轮轮廓曲线,将推书机构在 ADAMS 建模,再进行运动仿真, 仿真结果表明所设 计的机构满足工作要求, 为凸轮连杆组合机构的创新设计提供了依据。
机械工业出版社, 2001. [ 4] 王 华 坤 , 范 元 勋. 机 械 设 计 基 础 ( 上 ) [ M] . 兵 器 工 业
出版社, 2001, 28~30. [ 5] 陈瑞良, 叶仲和, 于潇雁. 摆动从动件凸轮- 连杆组
合机构的解析法设计[ J] . 机械设计, 2003, 44~45. [ 6] 傅 时 杰. CAE 技 术 在 机 构 设 计 中 的 应 用 [ J] . 装 备 机
根据图 2 所示书本打包机械设计中所限定
的安装尺寸及机器的轮廓尺寸, 为使机器具有
良 好 的 传 力 性 能 , 优 化 后 的 机 构 尺 寸 [2] 为 l1= 634.582, l2=224.585, l3=302.473。根据推书行程 H=400=n×π×D=n×π×M×Z, H=H1+H2, H1: H2=
机械原理课程设计 书本打包机设计-全文可读
二、最小曲率半径
校核实际轮廓线的最小曲率半径时, 由ρa min +滚子半径r = ρmin得最 小曲率半径, 由高数公式ρ = (x2+y2)2/3/x’y” - x”y’, 并逐点求解得最小曲率半径 ρmin < [ρ]。
折边机构方案对比:
方案一:
方案二:
4.折边、折角机构
方案一的主要执行机构为 凸轮、连杆和摆杆机构, 通过 凸轮的回转运动, 带动连杆摆 动, 进而实现假肢杆件的间隙 闭合开启运动, 实现折上下边 的功能。
2.纵向推书机构
计算方法:
2.纵向推书机构
位置分析: 速度分析: 加速度分析:
送纸机构工作原理: 用皮带轮控 制另一个主动轮,按额定的转速转 动,通过不完全齿轮控制摩擦轮的 运动,当需要送
纸的时候使不完全齿轮与完全齿 轮相啮合,实线送纸,不需要时使 不完全齿轮的圆滑 面与齿轮相切, 实现优传缺纸点的: 机间构歇简。单,空间构件灵活,
3.裁纸机构
凸轮参数计算
3.裁纸机构
一、最大压力角
凸轮机构在运动过程中, 其压力角α是不断变化的 。为了观察机构压力角的变化情况, 以找出最大压 力角, 可对机构进行高副低代, 换成低副机构加以 观察。滚子中心可视为从动件尖端, 它与
理论轮廓线形成高副接触。 计算时可将某一位置时滚子中心与凸轮接触点的 曲率中心分别代以转动副铰接一个虚拟构件来代 替高副, 从而得到一个曲柄滑块机构。 经作图计算, 最大压力角为α=36.5°<[α]=30° ~38°
稳定性好,设计简单,精度有保证。但其 不完全齿轮加工复杂,成本高,工作时会 产生冲击,载荷不大,对机构整体的稳定 性影响不大。
3.送纸机构
3.裁纸机构
包装机推包机构运动方案设计
14 包装机推包机构运动方案设计14.1 设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图14.1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcde线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
14.2 设计数据与要求要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm.行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
图14.1 推包机构执行构件运动要求14.3 设计任务1)至少提出两种传动方案,然后进行方案分析评比,选出一种传动方案进行设计。
2)确定电动机的功率与转速。
3)设计传动系统中各机构的运动尺寸,并绘制出推包机的机构运动简图。
4)对输送工件的传动系统提出一种方案并进行设计。
5)对所用到的齿轮进行强度计算,确定其尺寸。
6)进行推包机结构设计,绘制其装配图。
7)编写课程设计说明书。
14.4 参考方案(1)用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图14.2)。
在此方案中,偏置滑块机构可实现行程较大的往复直线运动,且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求,这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动。
图14.2偏置滑块机构与往复移动凸轮机构的组合如果采用直动推杆盘形凸轮机构或摆动推杆盘形凸轮机构,可有另两种方案(图14.3、图14.4)。
机械原理课程设计包装机包装机构设计说明书doc

机械原理课程设计包装机包装机构设计说明书doc案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
机械原理包装机推包机构设计——毕业设计

机械原理包装机推包机构设计——毕业设计机械原理课程设计说明书设计题目:包装机推包机构运动方案设计专业:机械设计制造及其自动化班级:C06机械(2)班设计者:指导老师:设计任务书学生姓名:专业:机械设计制造及其自动化班级:课程设计题目:包装机推包机构运动方案设计课程设计题目来源:实际生产指导教师:任务下达日期:2008年 6月23 日课程设计开始日期:2008年6月 23 日课程设计完成日期:2003年 6 月 30日目录设计任务书 (3)第一章总论及设计 (5)1.1功能要求 (5)第二章传动方案 (8)2.1传动方案的拟定及电动选择: (8)第三章:主要执行结构方案设计 (14)3.1推送回程机构 (14)3.2传动装置: (16)3.3 机械系统运动转换功能 (17)3.4形态学矩阵 (19)第4章机械运动系统设计方案拟定 (22)4.1拟定的方案: (22)第5章方案的评价 (24)5.1评价方案表 (24)第6章系统设计数据处理 (29)6.1方案a的数据处理 (29)6.2传动机构的尺寸设计及数据处理 (31)6.3成品的尺寸设计 (33)结束语 (33)参考文献 (36)摘要:包装机推包机是一种包装机中不可缺少的一部分,它推送物品到达指定包装工作台该机构取代了传统的人工移动物品,工作效率底的缺点,我所设计的推包机构推包,回程一体的全自动化功能其主要设计思路来自于对传统工艺分解,然后按照相应功能的机构部件进行设计,对比,选定,以及优化组合.综合利用凸轮的往复运动,齿轮的传动运动,以及减速器的定植调速比的设定..利用Auto Cad软件强大绘图功能,和Word的编辑功能,把设计方案图文并茂,栩栩如生.关键字:凸轮推包回程齿轮传动第一章总论及设计1.1功能要求推包机构能够实现推送,回程全自动一体化的一个机构。
它由推刨机构,回程机构以及电动机组成设计数据与要求现需要设计某一包装机的推包机构,要求待包装的工件1(见图13.1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
《机械原理课程设计》包装机

包装机摘要:在这次课程设计中,我的研究对象为简单的包装机械。
为了解包装机械的构造,以及包装机械是如何去工作运行的,我有了以下思路。
首先先设定两种包装机械的运动方案,并分析出最佳方案。
紧接着完成对机构运动简图的绘画,利用UG软件进行三位建模,运用UG软件的仿真模块进行运动仿真分析,得到冲头、压头的各种运动曲线,最后画出运动循环图。
在本次课程设计中,我主要通过查阅资料和使用UG绘图,让我体会了设计的不易。
同时也让我更深入的学习了UG 绘图的方法。
关键词:UG;包装机械;三维建模0引言随着如今社会的快速发展,生活水平的不断提高,物料的供应已经逐渐满足不了人们的生活。
此现状还增加了企业之间的竞争,生产优质物料产品的企业慢慢增加,对设备的要求也越来越严格。
传统企业在运行过程中的工序输送以及半成品在操作过程中出现触摸、摩擦、碰撞等对物料造成损坏,出现瑕疵的影响都会影响物料包装产业的发展,包装机的出现可以很大程度上改善这一现状。
目前国内外的物料自动包装企业都逐步研究出了自己的自动包装系统和独有的运输线,全自动的物料包装装置已经开始有了自己的市场,并且它还可以降低人工成本,提高生产效率,因此包装机势必发展成为未来几年的行业趋势。
这次设计首先有助于加深我们机械设计自动化这个专业的理解,我们在课堂上学的都是基础理论知识,对于如何用四年所学知识还是有一定难度,通过设计,我们可以真正理解本专业的内涵。
其次有利于我们逻辑思维的锻炼,设计能直接有效地训练学生的创新思维、培养分析问题、解决问题能力。
即使是一个简单的设计计算,依然需要学生有条不理的构思。
再者有利于培养严谨认真的学习态度,在设计过程里,当我们设计计算的时候,如果不够认真或细心,那么可能导致一些数据错误或者一些选用错误,从而无法得出正确的计算结果或预想的设计成果。
那么,这个就需要我们进行反复修改,而该过程其实也是对我们认真严谨治学的一个锻炼。
最后通过这次设计,希望能够设计出一款方便使用的包装机,也通过这次设计,检验我这四年所学到的知识,加强我对所学到知识的理解,弥补漏洞,希望对未来的工作学习有所帮助。
用于包装的运动控制方案

应用于包装领域的运动控制解决方案Thomson 直线和旋转产品优化您的包装机械性能通常,理想的设计解决方案并不仅仅是寻求最快、最坚固、最精确甚至最便宜的方案。
而是在性能、使用寿命和成本等方面达到最佳平衡。
对包装行业的机器制造商来说,若想每个应用都能快速配置最佳直线运动解决方案,Thomson将是最佳合作伙伴。
适用于各种工作的绝佳技术通常,同样的机器功能可以通过不同的方式获得。
Thomson拥有行业内最广泛的机械运动技术产品。
能够为每个应用提供相关优化选择建议。
最优的外形、配件和功能Thomson可以提供最广泛的标准产品系列。
也有标准产品的改良版本可供选择。
白皮书解决方案适用于整个产品目录。
如有特殊需求可报告。
例如,许多Thomson产品都可以提供不锈钢和其他保护选项,用于食品/饮料、冲洗、微粒和腐蚀性环境。
无与伦比的应用专家经验选择Thomson,即意味着选择了70多年的全球应用和众多行业问题的解决经验。
更具竞争力的包装机在早期设计过程中,Thomson即可用来优化机器的性能、使用寿命和成本。
其次,因为我们提供了高质量的部件、可预测的成本和及时交付,来保证您商业的顺畅运行,所以在机器的生产周期中,您将可以轻松享受一切。
帮助您建造更好的包装机应用于包装领域的运动控制解决方案拾取-放置/托盘包装此处展示的只是Thomson为包装机增加价值的众多方法中的几种。
例如,该4轴拾取-放置机器人可用于托盘包装和装载。
Thomson直线部件和预组装直线系统可以配置到小型和大型多轴运动解决方案中。
在垂直轴上,Thomson轧制滚珠丝杠驱动直线系统(带Thomson RoundRa il直线圆导轨),与我们的Micron齿轮箱和Deltran断电制动器相匹配。
Thomson直线导轨可以承受负载,并利用末端支撑的滚珠丝杠驱动来增加水平轴的刚度。
在这里及下述应用中,Micron 行星齿轮减速机和Kollmorgen伺服电机将在3个轴上进行耦合。
推包机

小组成员 毛梦月 万郝斯佳 宋敏 指导老师 苏华
包装机推包机构简介
• 包装机是一个产品生产和外包的机器的统称,其主要 功能是包装各种产品,而包装机 推包机构则是给包装机
提供包装产品的机构,其主要功能就是从生产线将产品
输送到包装 机的相应入口,推包机构的运动是一个按一 定轨迹的循环往复运动。它推送物品到达指定 包装工作 台,该机构取代了传统的人工移动物品,改善了工作效 率低的缺点。 我组所设计的推包机构,有回程一体的全
自动化功能,其主要设计思路来自于对传统 工艺的分解,
然后按照相应功能的机构部件进行设计,对比,选定,以及 优化组合。
推包机功能和结构
•
推包机构能够实现推送,回程全自动一体化的一个机 构。它由推刨机构,回程机构以及电动 机组成 设计数据 与要求现需要设计某一包装机的推包机构,要求待包装 的工件 1(见图 13.1)先由 输送带送到推包机构的推头 2 的前方,然后由该推头 2 将工件由 a 处推至 b 处 (包装工作台) , 再进行包装。为了提高生产率,希望 在推头 2 结束回程(由 b 至 a)时,下一个工件已送到 推头 2 的前方。 这样推头 2 就可以马上再开始推送工作。 这就要求推头 2 在回程时先退 出包装工作台, 然后再 低头,即从台面的下面回程。因而就要求推头 2 按图示 的 abcde 线路运动。即实现“平推 —水平退回—下降— 降位退回—上升复位”的运动。
设计方案
• 机构主要是由一个摆动导杆机构机构以及 一个凸轮机构组合而成的。摆动导杆机构 主要是实现推头的往复的直线运动,从而 实现推头在推包以及返回的要求。而凸轮 机构实现的是使推头在返程到达C点的时 候能够按照给定的轨迹返回而设计的。
机构的设计
块状物品推送机的机构综合和结构设计

设计题目在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如下图所示。
二、设计数据与要求1. 向上推送距离H=80mm,生产率为每分钟推送物品100件;2. 推送机的原动机为同步转速为3000转/分的三相交流电动机,通过减速装置带动执行机构主动件等速转动;3. 由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动;4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值为100N;5. 使用寿命10年,每年300工作日,每日工作16小时;6. 在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350),结构紧凑,振动噪声小。
三、设计任务1. 至少提出二种运动方案,然后进行方案分析评比,选出一种运动方案进行机构综合;2. 确定电动机的功率与满载转速;3. 设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图;4. 在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速度和加速度变化曲线;5. 如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主动件轴上加多大转动惯量的飞轮;6. 进行推送机减速系统的结构设计,绘制其装配图和两张零件图;7. 编写课程设计说明书方案一:连杆机构图1所示的连杆机构由曲柄摇杆机构ABCD与曲柄滑块机构GHK通过连杆EF相联组合而成。
连杆BC上E点的轨迹,在部分近似呈以F点为圆心的圆弧形,因此,杆FG在图示位置有一段时间实现近似停歇。
图1方案二:凸轮机构图2所示的凸轮机构,由凸轮、从动件、和机架三个基本构件组成,能使从动件获得较复杂的动动规律,因为从动件的运动规律取决于凸轮轮廓曲线,所以在应用时只根据从动件的运动规律来设计轮廓曲线就可以了。
机械原理课程设计包装机包装机构设计说明书doc

目录第一章设计题目1.1 设计数据与要求1.2 设计任务第二章功能分解第三章机构设计3.1 机构选型3.2 机构最终成型与凸轮设计第四章其他推包机构的设计方案第五章推包机构设计方案的评定与选择第六章推包设计方案的最终简图第七章心得体会第八章参考文献第一章 设计题目现需设计某一包装机的推包机构,要求待包装的工件1(见附图33)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a 处推至b 处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b 至a )时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工件。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头 2 按图示的abcdea 线路运动。
即实现“平推—水平退回-下降-降位退回-上升复位”的运动。
包装工作台e H s b c 1a 2 附图33 推包机构执行构件运动要求图一推包机构执行构件运动要求1.1、设计数据与要求要求每5~6s包装一个工件,且给定:L=100mm, S=25mm, H=30mm.行程速比系数K在1.2~1.5范围内选取,推包机由电动机驱动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回行程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
1.2、设计任务1)、至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计。
2)、确定电动机的功率与转速。
3)、设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图。
4)、对输送工件的传动系统提出一种方案并进行设计。
5)、对所用到的齿轮进行强度计算,确定其尺寸。
6)、进行推包机结构设计,绘制其装配图。
7)、编写课程设计说明书。
第二章功能分解完成包装机推包机构(见图33)的相关工艺,需实现下列运动功能要求:(1)推头为了实现a、b、c或d、e间的往复运动,需要设计一个滑块导杆机构或者一个摇杆滑块机构或者是一个凸轮导杆机构。
书本打包机纵向推书机构的设计
华北科技学院课程设计任务书题目书本打包机纵向推书机构的设计专业、班级机制B084 学号 200802024410 姓名主要内容、基本要求、主要参考资料等:一、设计题目设计书本打包机中的推书机构、送纸机构及裁纸机构。
书本打包机的用途是用牛皮纸将一摞书包成一包,并在两端贴好标签,如图一所示。
二、工作原理及工艺动作过程书摞包、封过程工艺顺序及各工位布置分别如图二、三所示,分述如下:(1)横向送书(送一摞书)。
(2)纵向推书前进(推一摞书)到工位a,使它与工位b~g上的六摞书贴紧在一起。
(3)送包装纸。
包装纸原为整卷筒纸,由上向下送够长度后进行裁切。
(4)继续推书前进到工位b,在工位b处书摞上下方设置有挡板,以挡住书摞上下方的包装纸,所以书摞被推到工位b时实现三面包,这一工序共推动a~g的七摞书。
(5)推书机构回程,折纸机构动作,先折侧边将纸包成筒状,再折两端上、下边。
(6) 继续折前角。
将包装纸折成如图三实线所示位置的形状。
(7) 再次推书前进折后角。
推书机构又进到下一循环的工序(4),此时将工位b 上的书推到工位c 。
在此过程中,利用工位c 两端设置的挡板实现折后角。
(8) 在实现上一步工序的同时,工位c 的书被推至工位d 。
(9) 在工位d 处向两端涂浆糊。
(10) 在工位e 贴封签。
(11) 在工位f 、g ,用电热器把浆糊烘干。
(12) 在工位h ,人工将包封好的书摞取下。
三、原始数据和设计要求1、推书机构的基本数据为了保证工作安全、台面整洁,推书机构最好放在工作台面以下。
2、工艺要求的数据书摞尺寸:宽度=a 130~140mm ;长度=b 180~220mm ;高度=c 180~220mm 。
推书起始位置:=DO x 表中数据。
推书行程:=H表中数据。
n (10±0.1)r/min。
推书次数(主轴转速):=主轴转速不均匀系数:δ≤1/4。
3、纵向推书运动要求(1)推书运动循环:整个机器的运动以主轴回转一周为一个循环周期。
包装机械推送机构设计

二、凸轮机构的分类
凸轮机构的分类方法有多种,可以根据不同的角度进行分类。根据凸轮的形 状,凸轮机构可以分为圆柱凸轮机构和平面凸轮机构。圆柱凸轮机构的凸轮是一 个圆柱体,具有曲线轮廓的外表面。平面凸轮机构的凸轮是一个平面图形,具有 曲线轮廓的侧面。
根据从动件的运动形式,凸轮机构可以分为转动凸轮机构和摆动凸轮机构。 转动凸轮机构的从动件围绕凸轮轴转动,而摆动凸轮机构的从动件在凸轮轴的一 侧摆动。
三、凸轮机构的设计基础
凸轮机构的设计基础主要包括凸轮的轮廓曲线设计、从动件的位移曲线和加 速度曲线的设计以及凸轮机构的压力角和传力性能设计。来自1、凸轮的轮廓曲线设计
凸轮的轮廓曲线决定了从动件的运动规律,因此它是凸轮设计的重要环节。 常用的凸轮轮廓曲线包括等速运动曲线、简谐运动曲线和摆线等。
2、从动件的位移曲线和加速度 曲线设计
1、物料传输:将产品或包装件从一个工作位置传送到另一个工作位置,保 证生产流程的连续性。
2、定位与对中:推送机构应具备定位和对中功能,以确保被推送物在正确 的位置,并满足后续工艺的要求。
3、缓冲与调节:在生产过程中,推送机构应具备一定的缓冲和调节能力, 以适应不同的生产需求和应对可能的异常情况。
三、设计原则与流程
在进行包装机械推送机构设计时,应遵循以下原则:
1、功能性:推送机构应满足生产过程中的各项功能需求,如物料传输、定 位对中等。
2、稳定性:推送机构应具备高稳定性,以保证在长时间运行过程中性能的 稳定。
3、高效性:优化推送机构的运动轨迹和传动系统,以提高其工作效率。
4、易维护性:设计时应考虑到日后的维护和保养工作,尽量使其简单易行。 5、经济性:在满足功能和性能要求的前提下,尽可能降低制造成本。
包装机推包机构运动方案设计

包装机推包机构运动方案设计随着科技的不断发展,包装机在各行业中的应用越来越广泛,它能够有效地提高生产效率,降低人工成本。
然而,为了满足各种不同的包装需求,我们需要对包装机的推包机构进行深入的设计和研究。
本文将重点探讨包装机推包机构的运动方案设计。
推包机构是包装机的重要组成部分,主要负责将包装物推向包装机的下一个环节。
通常情况下,推包机构由推头、推送轨道、推送电机以及相关的机械部件组成。
其中,推头是推包机构的核心部分,它能够精确控制包装物的位置和速度。
推送轨道则为推头提供了导向,使推头能够准确地将包装物推向下一个环节。
推送电机则是提供动力的来源,通过调控电机的转速和转矩,可以控制推头的运动速度和力量。
推包机构的运动方案设计应考虑以下几个方面:运动平稳性:为了确保包装物的完整性和避免由于剧烈冲击引起的破损,推包机构的运动应当平稳。
在设计中,可以通过优化推送电机的控制算法来实现这一目标。
定位精度:推包机构需要精确地将包装物定位到包装机的下一个环节。
因此,在设计推包机构时,需要考虑到定位精度的问题。
例如,可以通过使用高精度的传感器和优化机械部件的制造精度来提高定位精度。
适应性:为了满足不同包装物的要求,推包机构应具有一定的适应性。
例如,可以通过设计可调节的推送轨道和可更换的推头来适应不同的包装物形状和尺寸。
维护方便性:推包机构在使用过程中需要进行定期维护和保养,因此,在设计推包机构时,应考虑到维护方便性的问题。
例如,可以设计易于拆卸的机械部件和便于观察的指示灯来提高维护方便性。
包装机推包机构的运动方案设计是包装机设计的关键部分。
在设计过程中,需要考虑运动平稳性、定位精度、适应性和维护方便性等多个方面。
通过优化设计方案,可以提高包装机的性能和效率,降低包装成本,提高产品的质量和竞争力。
随着科技的不断进步,我们还需要不断研究和探索新的技术手段和应用领域,以推动包装机技术的不断发展。
随着科技的发展和人们对包装机械需求的增长,茶叶包装机成为了茶叶产业中不可或缺的一部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、设计题目 (2)二、设计方案的选定 (3)三、机构的设计 (6)1、偏置滑块机构的设计 (6)2、直动滚子从动件盘形凸轮轮廓设计 (7)四、电动机的选定及传动系统方案的设计 (9)1、电动机转速、功率的确定 (9)2、传动系统的设计 (9)五、小结以及对这次课程设计的心得体会 (12)六、参考文献 (12)一、设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcde线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。
行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
图1 推包机构执行构件运动要求二、设计方案的选定方案一:双凸轮机构与摇杆滑块机构的组合,(见图2)图2双凸轮机构与摇杆机构滑块机构的组合方案一的运动分析和评价:该机构由凸轮1和凸轮2,以及5个杆组成。
机构一共具有7个活动构件。
机构中的运动副有7个转动副,4个移动副以及两个以点接触的高副。
其中机构的两个磙子存在两个虚约束。
由此可知:机构的自由度F=3n-2Pl+Ph-p' =1机构中有一个原动件,原动件的个数等于该机构的自由度。
所以,该机构具有确定的运动。
在原动件凸轮1带动杆3会在一定的角度范围内摇动。
通过连杆4推动杆5运动,然后连杆6在5的推动下带动推头做水平的往返运动,从而实现能推动被包装件向前运动。
同时凸轮2在推头做回复运动的时候通过向上推动杆7,使连杆的推头端往下运动,从而实现推头在给定的轨迹中运动。
该机构中除了有两个凸轮与从动间接触的两个高副外,所有的运动副都是低副。
在凸轮与从动件的接触时,凸轮会对从动件有较大的冲击,为了减少凸轮对从动件冲击的影响,在设计过程中把从动件设计成为滚动的从动件,可以间接增大机构的承载能力。
同时,凸轮是比较大的工件,强度比较高,不需要担心因为载荷的过大而出现机构的断裂。
在整个机构的运转过程中,原动件1是一个凸轮,凸轮只是使3在一定角度的往复摆动,而对整个机构的分析可知,机构的是设计上不存在运转的死角,机构可以正常的往复运行。
机构中存在两个凸轮,不但会是机构本身的重量增加,而且凸轮与其他构件的连接是高副,而高副承载能力不高,不利于实现大的载荷。
而整个机构连接不够紧凑,占空间比较大。
方案二:偏执滑块机构与盘形凸轮机构组合,(见图3)图3偏置滑块机构与盘形凸轮机构的组合方案二的运动分析和评价:方案二的机构主要是由一个偏置滑块机构以及一个凸轮机构组合而成的。
偏置滑块机构主要是实现推头的往复的直线运动,从而实现推头在推包以及返回的要求。
而凸轮机构实现的是使推头在返程到达C点的时候能够按照给定的轨迹返回而设计的。
这个组合机构的工作原理主要是通过电动机的转动从而带动曲柄2的回转运动,曲柄在整周回转的同时带动连杆3在一定的角度内摆动,而滑块4在水平的方向实现往复的直线运动,从而带动连着推头的杆运动,完成对被包装件的推送过程。
在推头空载返回的过程中,推头到达C点时,凸轮的转动进入推程阶段,使从动杆往上运动,这时在杆5和杆6连接的转动副就成为一个支点,使杆6的推头端在从动件的8的推动下向下运动,从而使推头的返程阶段按着给定的轨迹返回。
这个机构在设计方面,凸轮与从动见的连接采取滚动从动件,而且凸轮是槽型的凸轮,这样不但能够让从动件与凸轮之间的连接更加紧凑,而且因为采用了滚动从动件,能使减轻凸轮对它的冲击,从而提高了承载能力。
而采用的偏置滑块机构能够实现滑块具有急回特性,使其回程速度高于工作行程速度,以便缩短空回程的时间,提高工作效率。
但此机构的使用的是槽型凸轮,槽型凸轮结构比较复杂,加工难度大,因此成本会比较高。
方案三:偏置滑块机构与往复移动凸轮机构的组合,(见图4)图4偏置滑块机构与往复移动凸轮机构的组合方案三的运动分析和评价:用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图4)。
此方案通过曲柄1带动连杆2使滑块4实现在水平方向上的往复直线运动,在回程时,当推头到达C点,在往复移动凸轮机构中的磙子会在槽内相右上方运动,从而使杆7的推头端在偏置滑块和往复移动凸轮的共同作用下沿着给定的轨迹返回。
在此方案中,偏置滑块机构可实现行程较大的往复直线运动,且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求,这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动。
但是,此机构所占的空间很大,切机构多依杆件为主,结构并不紧凑,抗破坏能力较差,对于较大载荷时对杆件的刚度和强度要求较高。
会使的机构的有效空间白白浪费。
并且由于四连杆机构的运动规率并不能按照所要求的运动精确的运行只能以近似的规律进行运动。
综合对三种方案的分析,方案二结构相对不是太复杂,而且能满足题目的要求,最终我选择方案二。
三、机构的设计1、偏置滑块机构的设计由题目给定的数据L=100mm行程速比系数K在1.2-1.5范围内选取可由曲柄滑块机构的极位夹角公式11801kkθ-=+k=1.2-1.5 ∴其极位夹角θ的取值范围为16.36~36在这范围内取极位夹角为25。
滑块的行程题目给出S=100mm偏置距离e选取40mm用图解法求出各杆的长度如下:(见图5)由已知滑块的工作行程为100mm,作BB’为100mm,过点B 作BB’所在水平面的垂线BP,过点B’作直线作直线B’P交于点P,并使'BPB∠=25。
然后过B、B’、P三点作圆。
因为已知偏距e=40mm,所以作直线平行于直线BB’,向下平移40mm,与圆O’交于一点O,则O点为曲柄的支点,连接OB、OB’,则OB-OB’=2aOB+OB’=2b从图中量取得:AB=151.32mm AB’=61.86mm则可知曲柄滑块机构的:曲柄a=44.73mm 连杆b=106.59mm 到此,机构组合的曲柄滑块机构设计完毕。
2、直动滚子从动件盘形凸轮轮廓设计用作图法求出凸轮的推程角,远休止角,回程角,近休止角。
(见下图)因为题目要求在推头在返程阶段到达离最大推程距离为25mm时,要求推头从按照给定的轨迹,从下方返回到起点。
因此可利用偏置滑块机构,滑块在返回阶段离最大推程为25mm的地方作出其曲柄,连杆和滑块的位置,以通过量取曲柄的转动的角度而确定凸轮近休止角的角度,以及推程角,回程角。
具体做法如下:1)先在离点B为25mm的地方作点B’’;2)过点B’’作直线A’’B’’交圆O于点A’’,并使A’’B’’=AB;3)连接OA’’,则OA’’,A’’B’’为曲柄以及连杆在当滑块离最大推程距离为25mm时的位置。
因为题目要求推头的轨迹在abc段内实现平推运动,因此即凸轮近休止角应为曲柄由A’转动到A’’的角度,从图上量取,'''254A OA∠=,即凸轮的近休止角为127''''90s A OAπφ=∠=。
因为题目对推头在返程cdea段的具体线路形状不作严格要求,所以可以选定推程角,远休止角,回程角的大小。
选定推程角为718oπφ=,回程角1990sπφ=远休止角'9oπφ=。
因为题目要求推头回程向下的距离为30mm ,因此从动件的行程h=30mm 。
由选定条件近休止角为127'90s πφ=推程角为718o πφ=回程角1990s πφ=远休止角'9o πφ=,h=30mm ,基圆半径050r =mm,从动杆长度为40mm ,滚子半径5r r =mm 。
通过软件输入参数如下,通过软件输出凸轮轮廓线及机构简图如下图:四、电动机的选定及传动系统方案的设计1、电动机转速、功率的确定题目要求5-6s包装一个件,即要求曲柄和凸轮的转速为12r/min考虑到转速比较低,因此可选用低转速的电动机,查常用电动机规格,选用Y160L-8型电动机,其转速为720r/min,功率为7.5kW。
2、传动系统的设计系统的输入输出传动比1251260i i i=⨯=⨯=7206012i==,即要求设计出一个传动比60i=的减速器,使输出能达到要求的转速。
其传动系统设计如下图:电动机连接一个直径为10的皮带轮2,经过皮带的传动传到安装在二级减速器的输入段,这段皮带传动的传动比为1505 10i==,此时转速为720144/min5r=。
从皮带轮1输入到一个二级减速器,为了带到要求的传动比,设计齿轮齿数为,115Z =,260Z =,315Z =,445Z =。
验算二级减速器其传动比242136045121515Z Z i Z Z ⨯⨯===⨯⨯ 整个传动系统的传动比1251260i i i =⨯=⨯=则电动机转速经过此传动系统减速后能满足题目要求推包机构主动件的转速。
至此,包装机推包机构的机构以及传动系统的设计已经设计完毕。
推包机构的总装配简图如下:五、小结以及对这次课程设计的心得体会通过这次课程设计,我有了很多收获。
首先,通过这一次的课程设计,我进一步巩固和加深了所学的基本理论、基本概念和基本知识,培养了自己分析和解决与本课程有关的具体机械所涉及的实际问题的能力。
对平面连杆机构和凸轮机构有了更加深刻的理解,为后续课程的学习奠定了坚实的基础。
其次通过这次课程设计,我学会了怎样去研究设计一个从来没接触过的机械机构。
学会了一步一步地去了解一个没接触过的机构的运动规律,运动要求,根据要求设计出一个符合要求的运动机构。
这都将为我以后参加工作实践有很大的帮助。
非常有成就感,培养了很深的学习兴趣。
这样的课程设计能提高我们的自主设计能力,培养自己的创新能力。
这次课程设计我投入了不少时间和精力,我觉得这是完全值得的。
因为感觉通过这次课程设计我独立思考能力得到了进一步的加强。
六、参考文献1、《机械原理》王知行,刘延荣主编,高等教育出版社,20002、《机械原理课程设计》陆凤仪主编,机械工业出版社,20023、《机械原理课程设计》邹慧君主编,高等教育出版社,1998。