8051单片机间点对点的串行异步通信的C编程
51单片机的串口通信程序(C语言)
51单片机的串口通信程序(C语言) 51单片机的串口通信程序(C语言)在嵌入式系统中,串口通信是一种常见的数据传输方式,也是单片机与外部设备进行通信的重要手段之一。
本文将介绍使用C语言编写51单片机的串口通信程序。
1. 硬件准备在开始编写串口通信程序之前,需要准备好相应的硬件设备。
首先,我们需要一块51单片机开发板,内置了串口通信功能。
另外,我们还需要连接一个与单片机通信的外部设备,例如计算机或其他单片机。
2. 引入头文件在C语言中,我们需要引入相应的头文件来使用串口通信相关的函数。
在51单片机中,我们需要引入reg51.h头文件,以便使用单片机的寄存器操作相关函数。
同时,我们还需要引入头文件来定义串口通信的相关寄存器。
3. 配置串口参数在使用串口通信之前,我们需要配置串口的参数,例如波特率、数据位、停止位等。
这些参数的配置需要根据实际需要进行调整。
在51单片机中,我们可以通过写入相应的寄存器来配置串口参数。
4. 初始化串口在配置完串口参数之后,我们需要初始化串口,以便开始进行数据的发送和接收。
初始化串口的过程包括打开串口、设置中断等。
5. 数据发送在串口通信中,数据的发送通常分为两种方式:阻塞发送和非阻塞发送。
阻塞发送是指程序在发送完数据之后才会继续执行下面的代码,而非阻塞发送是指程序在发送数据的同时可以继续执行其他代码。
6. 数据接收数据的接收与数据的发送类似,同样有阻塞接收和非阻塞接收两种方式。
在接收数据时,需要不断地检测是否有数据到达,并及时进行处理。
7. 中断处理在串口通信中,中断是一种常见的处理方式。
通过使用中断,可以及时地响应串口数据的到达或者发送完成等事件,提高程序的处理效率。
8. 串口通信实例下面是一个简单的串口通信实例,用于在51单片机与计算机之间进行数据的传输。
```c#include <reg51.h>#include <stdio.h>#define BAUDRATE 9600#define FOSC 11059200void UART_init(){TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口为模式1,允许接收TH1 = 256 - FOSC / 12 / 32 / BAUDRATE; // 计算波特率定时器重载值TR1 = 1; // 启动定时器1EA = 1; // 允许中断ES = 1; // 允许串口中断}void UART_send_byte(unsigned char byte){SBUF = byte;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位}unsigned char UART_receive_byte(){while (!RI); // 等待接收完成RI = 0; // 清除接收完成标志位return SBUF;}void UART_send_string(char *s){while (*s){UART_send_byte(*s);s++;}}void main(){UART_init();UART_send_string("Hello, World!"); while (1){unsigned char data = UART_receive_byte();// 对接收到的数据进行处理}}```总结:通过以上步骤,我们可以编写出简单的51单片机串口通信程序。
单片机NFC点对点通信接收端C语言程序

error:
nfc_close(pnd);
nfc_exit(context);
return EXIT_SUCCESS;
}
if(nfc_target_send_bytes(pnd, abtTx, sizeof(abtTx), 0) < 0) {
nfc_perror(pnd, "nfc_target_send_bytes");
goto error;
}
printf("Data sent.\n");
print_nfc_target(nt, false);
printf("Waiting for initiator request...\n");
if((szRx = nfc_target_init(pnd, &nt, abtRx, sizeof(abtRx), 0)) < 0) {
pnd = nfc_open(context, connstrings[1]);
} else {
printf("No device found.\n");
return EXIT_FAILURE;
}
if(argc > 1) {
printf("Usage: %s\n", argv[0]);
return EXIT_FAILURE;
}
printf("NFC device: %s opened\n", nfc_device_get_name(pnd));
signal(SIGINT, stop_dep_communication);
80C51单片机串口通信(含原程序)
buf=NUMCODETAB[num];
transbyte(buf);
buf=NUMCODETAB[num];
transbyte(buf);
buf=NUMCODETAB[num];
transbyte(buf);
buf=NUMCODETAB[num];
transbyte(buf);
void send(uchar dat)
{
SBUF=dat;
while(TI==0);
TI=0;
}
void delay(void)
{
uchar x,y;
for(x=0;x<220;x++)
for(y=0;y<250;Leabharlann ++);}
void main(void)
{
uchar i;
TMOD=0x20;
SCON=0x40;
并将这些代码用发光二极管在发送端显示(流水灯效果)。
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar code tab[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
sbit DIPIN = P1^3;
uint num;
uchar receive (void)
{
uchar dat;
while(RI==0);
RI=0;
dat=SBUF;
SBUF=dat;
return dat;
}
unsigned char code NUMCODETAB[]={0xFC,0x60,0xDA,0xF2, //数字0,1,2,3
51单片机教程:单片机串行口通信程序设计

51单片机教程:单片机串行口通信程序设计1.串行口方式0应用编程 8051单片机串行口方式0为移位寄存器方式,外接一个串入并出的移位寄存器,就能扩展一个并行口。
单片机串行口通信程序设计硬件连接图例:用8051单片机串行口外接CD4094扩展8位并行输出口,如图所示,8位并行口的各位都接一个发光二极管,要求发光管呈流水灯状态。
串行口方式0的数据传送可采用中断方式,也可采用查询方式,无论哪种方式,都要借助于TI或RI标志。
串行发送时,能靠TI置位(发完一帧数据后)引起中断申请,在中断服务程序中发送下一帧数据,或者通过查询TI的状态,只要TI为0就继续查询,TI为1就结束查询,发送下一帧数据。
在串行接收时,则由RI引起中断或对RI查询来确定何时接收下一帧数据。
无论采用什么方式,在开始通信之前,都要先对控制寄存器SCON进行初始化。
在方式0中将,将00H送SCON就能了。
单片机串行口通信程序设计列子ORG 2000HSTART: MOV SCON,#00H ;置串行口工作方式0MOV A,#80H ;最高位灯先亮CLR P1.0 ;关闭并行输出(避象传输过程中,各LED的暗红现象) OUT0: MOV SBUF,A ;开始串行输出OUT1: JNB TI,OUT1 ;输出完否CLR TI ;完了,清TI标志,以备下次发送SETB P1.0 ;打开并行口输出ACALL DELAY ;延时一段时间RR A ;循环右移CLR P1.0 ;关闭并行输出JMP OUT0 ;循环说明:DELAY延时子程序能用前面我们讲P1口流水灯时用的延时子程序,这里就不给出了。
二、串行口异步通信org 0000HAJMP STARTORG 30HSTART:mov SP,#5fh ;mov TMOD,#20h ;T1: 工作模式2mov PCON,#80h ;SMOD=1mov TH1,#0FDH ;初始化波特率(参见表)mov SCON,#50h ;Standard UART settingsMOV R0,#0AAH ;准备送出的数SETB REN ;允许接收SETB TR1 ;T1开始工作WAIT:MOV A,R0CPL AMOV R0,AMOV SBUF,ALCALL DELAYJBC TI,WAIT1 ;如果TI等于1,则清TI并转WAIT1AJMP WAITWAIT1: JBC RI,READ ;如果RI等于1,则清RI并转READAJMP WAIT1READ:MOV A,SBUF ;将取得的数送P1口MOV P1,ALJMP WAITDELAY: ;延时子程序MOV R7,#0ffHDJNZ R7,$RETEND将程序编译通过,写入芯片,插入实验板,用通读电缆将实验板与主机的串行口相连就能实验了。
51单片机的串口通信程序(C语言)
#include <reg52.h>#include<intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned intsbit Key1 = P2^3;sbit Key2 = P2^2;sbit Key3 = P2^1;sbit Key4 = P2^0;sbit BELL = P3^6;sbit CONNECT = P3^7;unsigned int Key1_flag = 0;unsigned int Key2_flag = 0;unsigned int Key3_flag = 0;unsigned int Key4_flag = 0;unsigned char b;unsigned char code Num[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00, 0x10,0x89};unsigned char code Disdigit[4] = {0x7F,0xBF,0xDF,0xEF};unsigned char Disbuf[4];void delayms(uint t){uint i;while(t--){/* 对于11.0592M时钟,约延时1ms */for (i=0;i<125;i++){}}}//-----------------------------------------------------void SendData(uchar Dat){uchar i=0;SBUF = Dat;while (1){if(TI){TI=0;break;}}}void ScanKey(){if(Key1 == 0){delayms(100); if(Key1 == 0){Key1_flag = 1; Key2_flag = 0; Key3_flag = 0;Key4_flag = 0;Key1 = 1;}else;}if(Key2 == 0){delayms(100);if(Key2 == 0){Key2_flag = 1; Key1_flag = 0; Key3_flag = 0;Key4_flag = 0;Key2 = 1;}else;}if(Key3 == 0){delayms(50);if(Key3 == 0){Key3_flag = 1; Key1_flag = 0; Key2_flag = 0;Key4_flag = 0;Key3 = 1;}else;}if(Key4 == 0){delayms(50);if(Key4 == 0){Key4_flag = 1;Key1_flag = 0;Key2_flag = 0;Key3_flag = 0;Key4 = 1;}else;}else;}void KeyProc(){if(Key1_flag){TR1 = 1;SendData(0x55);Key1_flag = 0; }else if(Key2_flag){TR1 = 1;SendData(0x11); Key2_flag = 0;}else if(Key3_flag) {P1=0xff;BELL = 0;CONNECT = 1;Key3_flag = 0;}else if(Key4_flag){CONNECT = 0;BELL = 1;Key4_flag = 0;}else;}void Initdisplay(void){Disbuf[0] = 1;Disbuf[1] = 2;Disbuf[2] = 3;Disbuf[3] = 4;}void Display() //显示{unsigned int i = 0;unsigned int temp,count;temp = Disdigit[count]; P2 =temp;temp = Disbuf[count];temp = Num[temp];P0 =temp;count++;if (count==4)count=0;}void time0() interrupt 1 using 2 {Display();TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;}void main(){Initdisplay();TMOD = 0x21;TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;TR0 = 1;ET0 = 1;TH1 = 0xFD; //11.0592MTL1 = 0xFD;PCON&=0x80;TR1 = 1;ET1 = 1;SCON = 0x40; //串口方式REN = 1;PT1 = 0;PT0 = 1;EA = 1;while(1){ScanKey();KeyProc();if(RI){Disbuf[0] = 0;Disbuf[1] = 20;Disbuf[2] = SBUF>>4;Disbuf[3] = SBUF&0x0f;RI = 0;}else;}}51单片机串口通信C语言程序2**************************************************************; 平凡单片机工作室;ckss.asm;功能:反复向主机送AA和55两个数;主机使用一个串口调试软件设置19200,n,8,1***************************************************************/#include "reg51.h"#define uchar unsigned char#define uint unsigned int//延时程序//////////////////由Delay参数确定延迟时间*/void mDelay(unsigned int Delay){ unsigned int i;for(;Delay>0;Delay--){ for(i=0;i<124;i++){;}}}//////////////////// 主程序////////////////////void main(){ uchar OutDat; //定义输出变量TMOD=0x20; //TMOD=0TH1=0xf3; //12MHZ ,BPS:4800,N,8,1TL1=0xf3;PCON=0x80; //方式一TR1=1; //?????????????????????????????SCON=0x40; //串口通信控制寄存器模式一OutDat=0xaa; //向串口发送固定数据值for(;;) //循环程序{SBUF=OutDat;//发送数据for(;;){ if(TI) //发送中断位当发送停止位时置1,表示发送完成break;}mDelay(500);TI=0; //清零中断位OutDat=~OutDat; //显示内容按位取反}}。
第7章8051串行口及串行通讯技术
例7-2 方式2接收在双机通讯中的应用。
单片机技术
第7章 8051串行口及串行通讯技术
本例与上例相对应。若附加的第9位数据为校验位,在接收程序中应作偶校验 处理,设1组寄存器区的R0为数据缓冲器指针。 PIRI: PUSH PSW PUSH Acc SETB RS0 ;选择1组寄存器区 CLR RS1 CLR RI MOV A,SBUF ;收到数据送A MOV C,P JNC L1 JNB RB8,ERP ;ERP为出错处理程序 AJMP L2 L1: JB RB8,ERP L2: MOV @R0,A INC R0 POP Acc POP PSW ERP: ……… ;出错处理程序段 RETI
单片机技术
第7章 8051串行口及串行通讯技术
若SM2=0,则接收的第9位数据不论是0还是1,都产生 RI=1中断标志,接收到的数据装入SBUF中。 应用上述特性,便可实现MCS-51的多机通讯。 设多机系统中有一主机和3个8031从机,如下图。 主机的RXD与所有从机的TXD端相连,TXD与所有从 机的RXD端相连。从机的地址分别为00H、01H和02H。
单片机技术
第7章 8051串行口及串行通讯技术
7.2.2 方式1 SM0、SM1=01。用于数据的串行发送和接收。TXD脚和 RXD脚分别用于发送和接收数据。 方式1收发一帧的数据为10位,1个起始位(0),8个数 据位,1个停止位(1),先发送或接收最低位。帧格 式如图所示。
`
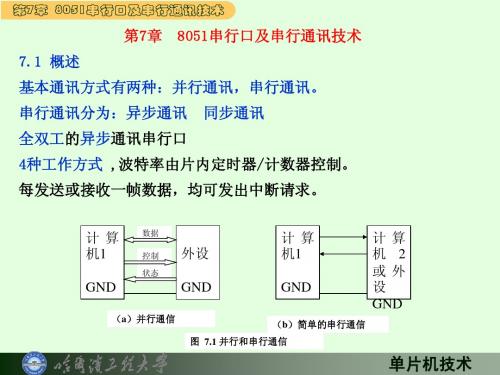
波特率由下式确定: 方式1波特率= (2SMOD/32) ×定时器T1的溢出率 SMOD为PCON寄存器的最高位的值(0或1)。
第7章
7.1 概述
8051串行口及串行通讯技术
基本通讯方式有两种:并行通讯,串行通讯。
51单片机和PC机串行异步通信C语言设计
******************实践教学*******************XXXXX大学XXXX学院XXX年秋季学期通信系统综合训练课程设计题目:51单片机与PC机串行异步通信设计专业班级:姓名:学号:指导教师:成绩:摘要随着计算机技术的迅速发展及其在各领域的广泛应用,远程控制以及数据采集系统多采用上位机和下位机的主从工作方式,由于串行通信具有高效可靠、价格便宜,遵循统一的标准等特点,因而成为主要的通信手段。
本次设计的任务是给出在分布式控制系统中上位PC机与下位单片机之间进行异步串行通信的解决方案,实现了上位机向多个(最多8个)下位机发送信息以及下位机接收上位机的数据并能够向上位机发送数据的功能。
在软件设计中,采用VC++6.0设计PC上的串口通信程序,在单片机编程上采用接近硬件系统的汇编语言编写通信程序及数据处理程序。
关键词:单片机;串行通信;RS-232;异步通信目录前言---------------------------------------------- 错误!未定义书签。
第1章通信原理与系统组成------------------------- 错误!未定义书签。
1.1 串行异步通信原理-------------------------- 错误!未定义书签。
1.2 系统构成---------------------------------- 错误!未定义书签。
第2章系统分析---------------------------------------------------- 62.1 系统设计思路----------------------------------------------- 62.2 模块组成--------------------------------------------------- 8 第3章硬件电路设计------------------------------------------------ 93.1 RS-232接口电路设计----------------------------------------- 93.2 MAX232接口电路 -------------------------- 错误!未定义书签。
第8章80C51单片机串行通信
功能 8位同步移位寄
存器 10位UART
11位UART
11位UART
波特率
fosc/12 可变
fosc/64或 fosc/32Leabharlann 可变8.3.1 串行工作方式0
串行工作方式0是把串行口作为同步移位寄存器使用,实 现串行数据的输入/输出。移位数据的传输以8位为一组,低位 在前、高位在后。
利用串行工作方式0,加上“并入串出”或“串入并出”芯 片 的配合,80C51的串行口可实现数据的并行输入/输出。
远程通信
对于远程通信(例如城市之间),不能使用基带传输方式,只能使用模拟信 号形式进行,一般使用电话线。 为了在电话线上进行串行数据传输,需要在发送端把数字信号转变为模拟信 号再进行发送,这种把数字信号转变为模拟信号的过程称为调制。在接收端 应把模拟信号再转变为数字信号,这一过程称为解调。远程通信多采用双工 方式,即通信双方都应具有发送和接收功能。为此在通信线路的两端都设置 调制器和解调器,并且把二者结合在一起称为调制解调器(Modem)。使用电 话线作传输线的远程通信连接如下图所示。
状态
1 0 1 0 计1算机 或0外设 0 1
10101001
计算机 发送 接收
计算机 或外设
(a) 并行通信
(b) 串行通信
基本通信方式示意图
8.1 串行通信基础知识
并行通信的特点:各数据位同时传送,传送速度快、效 率高。但有多少数据位就需要有多少根数据线,因此传送成 本高。在集成电路芯片的内部、同一插件板上各部件之间、 同一机箱内各插件板之间等的数据传送都是并行的。并行数 据传送的距离通常小于30米。
由于近距离串行通信不改变数据位波形和频率,所以也称 为基带传输方式。虽然基带方式实现起来既方便又经济, 但只能用于近程通信。
C8051F系列单片机串口通讯程序
C8051F系列单片机串口通讯程序C8051F系列单片机串口通讯程序采用C8051F020单片机//串口编程--接收PC发过来的字符串,回发字符串.发送期间中断控制LED灯闪烁//采用外部晶振22.1184MHz 使用定时器1,方式2产生波特率,SMOD = 0或者 1 //定时器初值X=256-SYSCLK*(SMOD+1)/(BAUDRATE*384)/#includesfr16 TMR3RL = 0x92; //定时器3重装载寄存器sfr16 TMR3 = 0x94; //定时器3计数器#define uchar unsigned char#define uint unsigned int//----------------------------------------------------------------------//参数设置区//----------------------------------------------------------------------#define BAUDRATE 4800 //波特率bps#define CLKOUT 22118400 //外部晶振,修改也要修改OSCXCN #define SMODVAL 0 //SMOD的值,修改请也修改PCONVAL#define PCONVAL 0x00 //PCON的值,=0x00时SMOD0=0; =0x80时SMOD0=1 #define TXVAL (256-CLKOUT*(SMODVAL+1)/BAUDRATE/384) //定时器初值#define MAX_LEN 10 //每次接收/发送字符串的长度//---------------------------------------------------------------------//全局变量//---------------------------------------------------------------------sbit LED = P1^6; //LED '1'亮'0'灭bit readFlag = 0; //读标志uchar readCounts = 0; //已经读取的字符个数,与MAX_LEN比较uchar idata trdata[MAX_LEN]; //要接收/发送的字符串//----------------------------------------------------------------------//子函数声明//---------------------------------------------------------------------- void SYSCLK_Init(void); //系统时钟初始化void PORT_Init(void); //端口初始化void UART0_Init(void); //串口UART0初始化void Send_Char(uchar ch); //发送单个字符void Send_String(uchar * str, uint len); //发送一个字符串void UART0_ISR(); //串口中断服务程序,接收字符void Timer3_Init(uint counts); //定时器3初始化void Timer3_ISR(void); //定时器3中断服务程序//---------------------------------------------------------------------- //主函数//---------------------------------------------------------------------- void main(void){WDTCN = 0xde; //禁止看门狗WDTCN = 0xad;SYSCLK_Init(); //时钟初始化PORT_Init(); //端口初始化UART0_Init(); //串口初始化Timer3_Init(CLKOUT/12/10); //定时器初始化EA = 1; //开全局中断while(1){if(readFlag) //已经读取{readFlag = 0; //清零Send_String(trdata,MAX_LEN); //发送字符串}}}//----------------------------------------------------------------------//子函数具体实现//----------------------------------------------------------------------//系统时钟初始化void SYSCLK_Init(void){uint i;OSCXCN = 0x67; //采用外部晶振22.1184MHz,不分频. 选型OSCXCN=0110,0111 for(i=0;i<256;i++); //等待>1mswhile(!(OSCXCN&0x80)); //查询直到XTLVLD=1,晶振稳定OSCICN = 0x88; //切换到外部振荡器,允许时钟失效监测器. OSCICN=1000,1000 }//端口初始化void PORT_Init(void){XBR0 = 0x04; //允许UART0,RX,TX连到2个端口引脚. XBR0=0000,0100XBR1 = 0x00;XBR2 = 0x40; //交*开关使能P0MDOUT |= 0x03; //P0.0为推拉方式输出,即TX0,RX0所在的端口0000,0011P1MDOUT |=0x40; //P1.6为推拉方式输出,即LED所在的端口0100,0000}//串口初始化void UART0_Init(void){SCON0 = 0x50; //选择串口方式1,波特率可变SCON0=0101,0000TMOD = 0x20; //选择T1,方式2,自动再装入8位计数器TH1 = (int)TXVAL; //T1初值,根据波特率,时钟等计算. 0xF4, bps=4800bpsTL1 = (int)TXVAL;ES0 = 1; //UART0中断开启TR1 = 1; //启动定时器T1PCON |= PCONVAL; //PCON=0x00,SMOD = 0 ; PCON=0x80,SMOD=1 TI0 = 1; //声明TX0就绪,可以发送TR0 = 1;}//定时器初始化void Timer3_Init(uint counts){TMR3CN = 0x00; //禁止定时器T3,清TF3,采用SYSCLK/12为时基TMR3RL = -counts; //初始化重装载值TMR3 = 0xffff; //设置为立即重装载EIE2 |= 0x01; //T3中断开启TMR3CN |= 0x04; //启动T3}//发送单个字符void Send_Char(uchar ch){SBUF0 = ch; //送入缓冲区while(TI0 == 0); //等待发送完毕TI0 = 0; //软件清零}//发送字符串,调用Send_Char() len字符串长度void Send_String(uchar * str,uint len){uint k = 0;do{Send_Char(*(str + k));k++;} while(k < len);}//定时器3中断服务程序void Timer3_ISR(void) interrupt 14 using 0 {TMR3CN &= ~(0x80); //清TF3LED = ~LED;}//UART0中断服务程序. 接收字符void UART0_ISR(void) interrupt 4 using 1 {uchar rxch;if(RI0) //中断标志RI0=1 数据完整接收{RI0 = 0; //软件清零rxch = SBUF0; //读缓冲if(readCounts>=MAX_LEN){readCounts = 0;readFlag = 1;}trdata[readCounts] = rxch; //存入数组,供发送readCounts++;}}//------------------------------------------------------------- //程序结束。
8051内部资源的C编程.pdf

8051内部资源的C编程 中断一.中断源二.中断的控制1.中断允许寄存器IE2.中断优先级寄存器IP三.中断响应定时器/计数器(T/C)一.与T/C有关的特殊功能寄存器1.计数寄存器TH和TL2.T/C控制寄存器TCON3.T/C的方式控制寄存器TMOD4.T/C2的方式控制寄存器:暂不介绍 二.T/C的工作方式1.方式02.方式13.方式24方式35.T/C2的工作方式三.定时器/计数器的初始化1.初始化步骤2.计数初值的计算串行口一.与串行口有关SFR1.串行口控制寄存器SCON2.电源控制寄存器PCON二.串行口的工作方式1.方式02.方式l:3.方式2和方式3三.串行口初始化1.串行口波特率2初始化步骤中断所谓中断,是指当计算机执行正常程序时,系统中出现某些急需处理的异常情况和特殊请求,这时CPU暂时中止现行程序,转去对更紧迫事件进行处理,处理完毕后,CPU自动返回原来的程序继续执行。
中断是一种常见的编程方法,如利用定时器0或定时器1的中断作为系统时间参考;利用外部中断INT0或INT1作为键盘按键中断处理等等。
中断处理函数以一下形式书写: void int_t0(void) interrupt 1 {}8051单片机有5个或更多中断源,有两个中断优先级,每个中断源的优先级可以编程控制,中断允许受到CPU"开中断位"(在C51的表达示EA)和"中断源开中断位"的两级控制。
一,中断源中断源是指任何引起计算机中断的事件来源,一个CPU允许有多个中断源。
8051系列单片机至少有五个可能的中断(8052有6个,其他系列成员最多可达15个)。
8051单片机的五个中断源是:外部中断请求0,由INT0\(P3。
2)输入;外部中断请求1,由INT0\(P3。
2)输入;片内定时器/计数器0溢出中断请求;片内定时器/计数器1溢出中断请求;片内串行口发送/接受中断请求。
8051单片机的异步串行通信技术
第八章 8051单片机的异步串行通信技术第一节概述计算机与外界的信息交换称为通信。
常用通信方式有两种:并行通信与串行通信,简称并行传送和串行传送。
并行传送具有传送速度快,效率高等优点,但传送多少数据位就需要多少根数据线,传送成本高;串行传送是按位顺序进行数据传送,最少仅需要一根传输线即可完成,传送距离远,但传送速度慢。
串行通信又分同步和异步两种方式。
同步通信中,在数据传送开始时先用同步字符来指示(常约定1—2个),并由同时传送的时钟信号来实现发送端和接收端同步,即检测到规定的同步字符后,接着就连续按顺序传送数据。
这种传送方式对硬件结构要求较高。
在单片机异步通信中,数据分为一帧一帧地传送,即异步串行通信一次传送一个完整字符,字符格式如图8—1所示:图8—1 异步串行通信的字符格式一个字符应包括以下信息:1. 起始位:对应逻辑0(space)状态。
发送器通过发送起始位开始一帧字符的传送。
2. 数据位:起始位之后传送数据位。
数据位中低位在前,高位在后。
数据位可以是5、6、7、8位。
3. 奇偶校验位:奇偶校验位实际上是传送的附加位,若该位用于用于奇偶校验,可校检串行传送的正确性。
奇偶校验位的设置与否及校验方式(奇校验还是偶校验)由用户需要确定。
4. 停止位:用逻辑1(mark)表示。
停止位标志一个字符传送的结束。
停止位可以是1、1.5或2位。
串行通信中用每秒传送二进制数据位的数量表示传送速率,称为波特率。
1波特=1bps(位/秒)例如数据传送速率是240帧/秒,每帧由一位起始位、八位数据位和一位停止位组成,则传送速率为:10×240=2400位/ 秒=2400波特单片机的串行通信主要采用异步通信传送方式。
在串行通信中,按不同的通信方向有单工传送和双工传送之分,如图8—2所示:(a)单工传送(b)双工传送(c)全双工传送图8—2 单片机串行通信方向示意图8—2(a)中,甲.乙两机只能单方向发送或接收数据;图8—2(b)中,甲机和乙机能分时进行双向发送和接收数据;图8—2(c)中,甲,乙两机能同时双向发送和接收数据。
C#完整的通信代码(点对点,点对多,同步,异步,UDP,TCP)

C# codenamespace UDPServer{class Program{static void Main(string[] args){int recv;byte[] data = new byte[1024];//构建TCP 服务器//得到本机IP,设置TCP端口号IPEndPoint ipep = new IPEndPoint(IPAddress.Any , 8001);Socket newsock = new Socket(AddressFamily.InterNetwork, SocketType.Dgram , ProtocolType.Udp);//绑定网络地址newsock.Bind(ipep);Console.WriteLine("This is a Server, host name is {0}",Dns.GetHostName());//等待客户机连接Console.WriteLine("Waiting for a client...");//得到客户机IPIPEndPoint sender = new IPEndPoint(IPAddress.Any, 0);EndPoint Remote = (EndPoint)(sender);recv = newsock.ReceiveFrom(data, ref Remote);Console .WriteLine ("Message received from {0}: ", Remote.ToString ()); Console .WriteLine (Encoding .ASCII .GetString (data ,0,recv ));//客户机连接成功后,发送欢迎信息string welcome = "Welcome ! ";//字符串与字节数组相互转换data = Encoding .ASCII .GetBytes (welcome );//发送信息newsock .SendTo (data ,data.Length ,SocketFlags .None ,Remote );while (true ){data =new byte [1024];//发送接受信息recv =newsock.ReceiveFrom(data ,ref Remote);Console .WriteLine (Encoding .ASCII .GetString (data ,0,recv)); newsock .SendTo (data ,recv ,SocketFlags .None ,Remote );}}}}C# codeusing System;using System.Collections.Generic;using System.Linq;using System.Text;using ;using .Sockets;namespace UDPClient{class Program{static void Main(string[] args){byte[] data = new byte[1024];string input ,stringData;//构建TCP 服务器Console.WriteLine("This is a Client, host name is {0}", Dns.GetHostName());//设置服务IP,设置TCP端口号IPEndPoint ipep = new IPEndPoint(IPAddress .Parse ("127.0.0.1") , 8001); //定义网络类型,数据连接类型和网络协议UDPSocket server = new Socket(AddressFamily.InterNetwork, SocketType.Dgram, ProtocolType.Udp);string welcome = "Hello! ";data = Encoding.ASCII.GetBytes(welcome);server.SendTo(data, data.Length, SocketFlags.None, ipep);IPEndPoint sender = new IPEndPoint(IPAddress.Any, 0);EndPoint Remote = (EndPoint)sender;data = new byte[1024];int recv = server.ReceiveFrom(data, ref Remote);Console.WriteLine("Message received from {0}: ", Remote.ToString()); Console.WriteLine(Encoding .ASCII .GetString (data,0,recv));while (true){input = Console .ReadLine ();if (input =="exit")break ;server .SendTo (Encoding .ASCII .GetBytes (input ),Remote );data = new byte [1024];recv = server.ReceiveFrom(data, ref Remote);stringData = Encoding.ASCII.GetString(data, 0, recv);Console.WriteLine(stringData);}Console .WriteLine ("Stopping Client.");server .Close ();}}}C# codeTCPClientTCPClient 类提供了一种使用TCP 协议连接到某个端点的简化方法。
第八章 单片机8051内部资源C语言编程

第八章 8051内部资源C语言编程一、I/O口编程例1:用按键控制发光二极管。
并口是用的最多的资源,下面以P1口为例,见电路图,P1口低4位接了4个按钮,高4位接了4个指示灯,要求按下相应的按钮,对应的指示灯亮。
P10对应P14,依次类推。
指示灯是端口输出高电平亮。
源程序如下:#include<at89x51.h>void main(){unsigned char data x,i;while(1){P1=P1|0x0f; //给低4位置1,高4位不变x=P1&0x0f; //读低4位x=~x; //低4位取反P1=x<<4; //左移4位for(i=0;i<255;i++); //延时}}(端口编程)注意上面几种常见的用法。
二、中断的C语言编程C51编译器支持在C源程序中直接开发中断程序。
前面已经讲过,中断服务程序是通过按规定语法格式定义的一个函数。
(中断有关内容)Array中断服务程序的函数定义的语法格式如下:Void 函数名(void) interrupt m [using n] { 中断程序代码;}m为MCS-51中断源编号,见表using n 选项用于实现工作寄存器组的切换,n是中断服务子程序中选用的工作寄存器组号(0- 3)。
例2:设AT89C52 的时钟频率为12MHz,利用定时中断在其P1.0 引脚输出周期为4ms,占空比为1:1的方波。
确定定时器工作方式和计算定时器初值。
选用定时器T0工作方式1,每个机器周期为1μs,翻转一次电平需要2ms,则计数次数n=2000/1=2000,初值x=65536-2000=63536=F830H参考程序如下:#include<REG52.h>sbit P10 = P1^0;//定义位void clock_initial() reentrant using 0//在中断中调用,定义为重入函数{TR0=0;TH0=0XF8;//装载计数初值TL0=0X30;TR0=1;}main( ){TMOD = 0x01; //定时器T0方式1 工作P10 = 0; //初始值为低电平TF0=0;//清除中断标志位clock_initial();ET0=1;EA=1;do{ } while(1); //死循环,等价于汇编语言的SJMP $}void clk_int ( void ) interrupt 1 using 0{P10= !P10;//逻辑变量clock_initial();}(延时中断)例3:图示是利用优先权解码芯片74LS148,在单片机8031的一个外部中断INT1上扩展多个中断源的原理电路图。
C8051F020单片机的RS485串行通信设计

C8051F020单片机的RS485串行通信设计关键字:单片机串行通信RS485l 引言随着计算机技术和测控技术的不断发展,在以单片机为核心的数据采集系统中,需要实现单片机和计算机之间的数据交换,并以此来发挥单片机和计算机各自的长处,提升整个系统的性能价格比。
在计算机网络和工业控制系统中,经常需要采用串行通信来实现远程数据传输。
目前,有多种接口标准可用于串行通信,包括RS232、RS422、RS485等。
RS232是最早的串行接口标准,在短距离、较低波特率串行通信中得到了广泛应用。
但是,RS232通信存在着传输速度慢、传输距离短、信号容易受到干扰等不足,其应用局限性已日益突出。
而RS485通信采用差分方式来消除噪声,即信号在发送前会分解为正负2条线路,当到达接收端时将信号相减,使噪声相互抵消,还原成原来的信号,这种方式对共模干扰抑制能力较强,已广泛应用于工业控制等领域。
要实现单片机与计算机之间的RS485通信,一般可以采用2种方法:一种方法是在单片机与计算机两端分别采用RS232与RS485电平转换装置;另一种方法是采用RS485通信卡,并将其插在计算机主板上。
采用前一种方法的优点是硬件装置安装简便,软件编程相对简单;缺点是通信速率被限制在20 kb/s以内。
第二种方法的优点是通信距离较远,速率较高,可达10 Mb/s;缺点是需要安装通讯卡和驱动程序,并进行必要的设置。
本文采用第二种方法。
2 总体架构在某型电子设备研制中,选用美国Cygnal公司生产的一种soc型8位单片机C8051F020,对测控系统进行数据采集。
该单片机是C8051F系列的F02X子系列,其性价比在工业控制领域具有较强的竞争力。
它是完全集成的混合信号系统级芯片,具有与8051指令集完全兼容的CIP一51内核,对于熟悉51单片机的技术人员来说,在硬件设计及软件编程上大大提高了开发效率。
测控计算机采用研华的IPC-610工控机,并选用PCL一846B通信卡进行RS485串行数据通信,该通信卡包含4通道,每个通道可以对32个节点进行通信。
8051单片机c语言程序设计与实例解析
8051单片机C语言程序设计与实例解析在现代电子技术领域,单片机是一种应用十分广泛的微处理器,而在单片机的应用中,8051单片机是一种非常经典的代表。
与此C语言作为一种高级编程语言,在单片机的程序开发中也有着广泛的应用。
本文将从8051单片机C语言程序设计的角度,对其进行深度和广度兼具的解析,通过实例来帮助读者更好地理解和掌握这一技术。
1. 8051单片机概述8051单片机是由Intel公司于上世纪80年代推出的一款经典单片机,至今仍然广泛应用于各种领域。
它的特点是体积小、功能强大、接口丰富,以及使用方便等。
在实际应用中,我们可以根据不同的需求选择不同型号的8051单片机,比如常见的AT89S52、AT89C52等。
2. C语言在8051单片机中的应用C语言作为一种高级编程语言,具有结构化、模块化和可移植性等优点,因此在单片机的程序设计中有着广泛的应用。
通过C语言编程,我们可以更轻松地实现对单片机的控制和管理,而且代码的可读性也更好,易于维护和修改。
3. 程序设计与实例解析接下来,我们将结合具体的实例来说明8051单片机C语言程序设计的方法和技巧。
我们可以以LED灯的控制、数码管的显示、蜂鸣器的驱动等为例,详细讲解如何使用C语言编写程序,通过8051单片机实现相应的功能。
我们也可以讲解一些常用的库函数和编程技巧,让读者能够更好地理解和应用这些知识。
4. 个人观点与理解在我看来,8051单片机C语言程序设计是一项非常有趣和有挑战性的工作。
通过编写程序,我们可以将自己的想法转化为现实,实现各种各样的功能,这种成就感是非常有价值的。
掌握了这项技能之后,我们也能够更好地应对各种实际问题,为自己的学习和职业发展打下良好的基础。
总结回顾通过本文的阐述,我们对8051单片机C语言程序设计进行了全面的评估和解析,从基本概念到具体实例,再到个人观点和理解,希望读者能够从中受益。
通过不断地实践和学习,我们相信大家一定能够掌握这一领域的知识,成为优秀的单片机程序设计工程师。
单片机原理及应用——C语言程序设计与实现第9章51单片机串行通信
A机允许发送? Y
N
发送请求信号
发送应答信号BB
B机允许发送? Y 指针初始化校验和 清零
N
指针初始化校验和 清零
接收一个字节数据 并求校验和
发送一个字节数据 并求校验和
数据已接收完 毕?
数据已发送完 毕? Y 发送检查和
N
Y
N
接收A机校验和并 与B机校验和比较 发送错误标志FFH
B机正确接收? N Y 返回
1 R0 VCC B A GND 8 7 6 5
第9章 51单片机串行通信
收、发时序
TXCLOCK SBUF SHIFT RXD
起始位
D0
D1
D2
D3
D4
D5
D6
D7 TB8
停止位
TI
发送时序图
TXCLOCK RXD 起始位 D0 D1 D2 D3 D4 D5 D6 D7 TB8 停止位
位检测器 采样时间 SHIFT RI
线之间的电位差就可以。
第9章 51单片机串行通信
9.1.2 单片机机间串行通信电路设计 一、点对点通信 MCS-51单片机一般采用RS-232C标准进行点对点的 通信连接。如果采用单片机自身的TTL电平直接传输信 息,其传输距离较近,一般不超过1.5m,因此常采用 MAX232芯片进行电平转换。硬件电路如下。
第9章 51单片机串行通信
第9章 51单片机串行通信
9.1 单片机机间串行通信设计
9.1.1 9.1.2 9.1.3 *9.2 常用接口芯片结构和工作原理 单片机机间串行通信电路设计 单片机机间串行通信软件编程
环境下PC机与单片机串行通程序设计 9.2.1 9.2.2 串行类介绍 PC机与下位机通信协议
基于单片机的点对点数据传输系统设计精编版

基于单片机的点对点数据传输系统设计精编版 MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】基于单片机实现点对点对点数据传输摘要C语言进行8051单片机程序设计是单片机开发与应用的必然趋势。
采用C语言可以很容易地进行单片机的程序移植工作,有利于产品中的单片机的重新选型。
其开发速度、软件质量、结构严谨、程序坚固等方面,C语言的完美绝非是汇编语言编程所能比拟的。
文章给出了采用C语言编程实现双机通信的具体实现方法。
双机通信也称点对点的通信,用于单片机和单片机之间交换信息,也用于单片机和通用微机间的信息交流。
在整个系统中,主要采用串行通信方式进行数据传输。
8051单片机自备串行接口,为机间通信提供了极为便利的条件。
利用主机和从机间配备RS-232C、RS-422或RS-485等关键词:单片机串行通信双机通信MAX3232Abstract'sproceduretransplantworkveryeasily,isadvantageousintheproductmono lithicintegratedcircuit',thesoftwarequality,thestructurearerigorous,the procedurefirmandsoonaspects,',,-232C,RS-422orRS-485andsoon.Keywords:MonolithicintegratedcircuitSerialcommunicationCorrespondenceMAX3232目录第一章绪论第二章单片机基础第一节单片机介绍第二节单片机历史第三章设计思路分析第一节串行通信的基本原理一、串行通信的原理二、串行通信的特点?三、串行通信的方式四、串行通信传送方式第二节51单片机的串口是RS-232标准串口一、RS-232标准介绍二、与RS-232C相匹配的连接器第三节接口电平转换第四章硬件电路设计第一节结构框图第二节主要器件第三节电路原理图及说明一、MAX3232实现的接口电平转换电路原理图二、单片机部分电路原理图第五章软件设计第一节协议设计第二节主机程序流程及代码一、主机的程序流程图二、主机的程序第三节从机程序流程及代码一、从机的程序流程图二、从机的程序第六章总结第一章绪论21世纪是全人类进入计算机时代的世纪,许多人不是在制造计算机便是在使用计算机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
·25 ·
TL1 = 0 E8 H ,PCON 寄存器的 SMOD 位为 0 。 三 、通信编程 点对点通信双方基本等同 ,只是人为规定一个
为发送 ,一个为接收 。要求两机串行口的波特率相 同 ,因而发送和接收方串行口的初始化相同 。可编 制含有初始化函数 、发送函数 、接收函数的程序 ,在 主函数中根据程序的发送 、接收设置 TR ,采用条件 判别决定使用发送函数还是接收函数 。这样点对点 通信的双方都可运行此程序 ,只需在程序运行之前 进行人为设置选择 TR ,一个令 TR = 0 ,一个令 TR = 1 然后分别编译 ,在两机上分别装入 ,同时运行 。
二 、通信双方的约定
接收一个数据便计算一次“校验和”,当收齐一个数
按照图 1 的接口电路 。假定 A 机 S YSTEM1 据块后 ,再接收 A 机发来的校验和 ,并将它与 B 机
是发送者 ,B 机 S YSTEM2 接收者 。
求出的校验和进行比较 。若两者相等 ,说明接收正
当 A 机开始发送时 ,先送一个“AA”信号 ,B 机 确 ,B 机回答 00 H ;若两者不等 ,说明接收不正确 ,B
}while ( ( SBU F^0xbb) ! = 0) ;
}
do{ pf = 0 ; for (i = 0 ;i < 16 ;i + + ) { SBU F = d[i ] ; Pf + = d[i ] ; while ( TI = = 0) ; TI = 0 ; } SBU F = pf ; while ( TI = = 0) ; TI = 0 ;
TH1 = 0xe8 ;
SBU F = 0x00 ;break ;
TL1 = 0xe8 ;
Else
PCON = 0x00 ;
{ SBU F = 0xff ;
TR1 = 1 ;
while ( TI = = 0) ; TI = 0 ;
SCON = 0x50 ;
}
}
}
void send (zchar idata 3 d)
以进行远距离传输 。 一 、通信双方的硬件连接 8051 一般采用 RS - 232C 标准进行点对点的
通信连接 。图 1 是两个 8051 间的连接方法 ,信号采 用 RS - 232C 电 平 传 输 , 电 平 转 换 芯 片 采 用 MAX232 。
图 1 8051 间 RS - 232C 电平信号的传输
收到后回答一个“BB”,表示同意接收 。当 A 机收到 机回答 0FFH ,请求重发 。
“BB”后 ,开始发送数据 ,每发送一次求“校验和”,假
A 机收到 00 H 的回答后 ,结束发送 。若收到的
定数据块长度为 16 个字节 ,数据缓冲区为 buf ,数据 答复非零 ,则将数据再重发一次 。双方约定的传输
zchar idata buf [ 10 ] ;
pf + = d[i ] ;
zchar pf ; void init (void) / 3 串行口初始化 3 /
} while ( R I = = 0) ;{R I = 0 ;
{ TMOD = 0X20 ;
if ( ( SBU F^pf) = = 0)
【责任编ቤተ መጻሕፍቲ ባይዱ 曲尔光】
·26 ·
关键词 :通信 ;单片机 ;C 语言 ; RS - 232C 接口 ;双机通信 中图分类号 : I206. 2 文献标识码 :A 文章编号 :1008 - 8008 (2003) 03 - 0025 - 02
双机通信也称点对点的通信 ,用于单片机和单 片机之间交换信息 ,也用于单片机和通用微机间的 信息交流 。在整个系统中 ,主要采用串行通信方式 进行数据传输 。8051 单片机自备串行接口 ,为机间 通信提供了极为便利的条件 。利用主机和从机间配 备 RS - 232C、RS - 422 或 RS - 485 等发送接收器
摘 要 :C 语言进行 8051 单片机程序设计是单片机开发与应用的必然趋势 。采用 C 语言可以很容易地进 行单片机的程序移植工作 ,有利于产品中的单片机的重新选型 。其开发速度 、软件质量 、结构严谨 、程序坚固等 方面 ,C 语言的完美绝非是汇编语言编程所能比拟的 。文章给出了采用 C 语言编程实现双机通信的具体实现方 法。
}
{zchar i ;
void main (void)
do{
{
SBU F = 0xaa ;
init () ;
while ( TI = = 0) ;
if ( TR = = 0)
TI = 0 ;
send (but) ;
While ( R I = = 0) ;
else
RI = 0 ;
receive (but) ;
块发送完后马上发送“校验和”。
波特率若为 1200 波特 ,查表可知 ,在双方的 fosc =
B 机接收数据并将其转贮到数据缓冲区 buf ,每 11. 0592M Hz 下 , T1 工作在定时器方式 2 , TH1 =
① 收稿日期 :2003 - 02 - 26 作者简介 :赵润林 (1960 - ) ,男 ,山西平鲁人 ,运城学院计算机系讲师 。
# include < reg51. h > # define TR 1 / 3 发送接收别值 3 /
for (i = 0 ;i < 16 ;i + + ) { while ( R I = = 0) ; R I = 0 ;
# define zchar unsigned char
d[i ] = SBU F ;
点对点通信的程序 zhaocom. c 如下 :
while ( R I = = 0) ; R I = 0 ; }while ( SBU F ! = 0) ; } void receive (zchar idata 3 d) {zchar i ; do { while ( R I = = 0) ; R I = 0 ; } while ( ( SBU F^0xaa) ! = 0) ; SBU F = 0xbb ; while ( TI = = 0) ; TI = 0 ; while (1) { pf = 0 ;
第 21 卷 第 3 期 2003 年 6 月
运城学院学报 Journal of Yuncheng University
Vol. 21 No. 3 J un. 2003
8051 单片机间点对点的串行异步通信的 C 编程
赵润林 ① 岳 丽 ②
( ①运城学院 计算机系 ; ②运城盐化局 , 山西 运城 044000)
参 考 文 献:
[ 1 ]曹巧媛. 单片机原理及应用[ M ] . 北京 :电子工业出版社 ,
2001. [ 2 ]谭浩强. 张基温. C 语言程序设计教程 [ M ] . 北京 :高等教
育出版社 ,2001. [3 ]马忠梅. 单片机的 C 语言应用程序设计 [ M ] . 北京 :航空
航天大学出版社 ,1999.