智能扫地机器人结构图片拆解及选材ppt课件
扫地机器人简介PPT课件

扫地机器人可以通过传感器和导航技术,适应不同的环境 条件。例如,有些扫地机器人可以自动适应不同的房间大 小和布局,以及清洁难以到达的区域。
提高清洁效率
扫地机器人可以通过自动化和智能化的方式,提高清洁效 率。例如,有些扫地机器人可以通过导航技术规划最短的 清扫路线,或者同时清洁多个房间。
05
实际应用
实际应用
帮助忙碌的家庭减少清扫时间
01
扫地机器人可以自动清扫地面,减轻了家庭成员的清
扫压力,节省了宝贵的时间和精力。
保持家庭环境清洁
02 扫地机器人的清扫功能可以帮助去除地面的灰尘和污
垢,保持家庭环境的清洁和卫生。
提高生活质量
03
通过使用扫地机器人,家庭成员可以将更多的时间和
精力投入到工作、学习和娱乐中,提高了生活质量。
发展趋势
技术进步
更智能的导航技术、更高效的清洁技术、远程控制和 互联网连接。随着技术的不断进步,扫地机器人将采 用更智能的导航技术,例如使用更先进的传感器和算 法进行地图构建和路径规划。同时,清洁技术也将变 得更加高效,例如使用更大的吸尘功率和更智能的清 洁策略。此外,远程控制和互联网连接也将成为未来 扫地机器人的发展趋势,使用户可以通过智能手机或 智能音箱进行控制和监控。
市场趋势
更多品牌进入市场、价格竞争加剧、用户普及度提高。 随着技术的不断发展和成本的降低,越来越多的品牌将 进入扫地机器人市场,导致市场竞争加剧。同时,随着 用户对扫地机器人认知度的提高和购买力的增强,用户 普及度也将不断提高。
发展趋势
• 环境因素:适应不同的清洁需求和环境条件,如地毯、硬木地板等。未来扫地机器人将能够适应不同的清洁需 求和环境条件。例如,针对地毯和硬木地板等不同材质的地面,扫地机器人将采用不同的清洁策略和刷头设计 。此外,针对不同的清洁需求,例如清洁家具底部和汽车内部等难以到达的区域,扫地机器人也将进行特殊设 计和功能优化。
小米扫地机器人拆解图及数据详细
小米扫地机器人拆解图及数据详细
小米扫地机器人拆解图及数据详细
米家扫地机器人个子虽小,但他确是一个具有1279个零部件的旁杂系统。
凝聚了米家扫地机器人研发团队的智慧和心血。
用一句话来形容:米家扫地机器人高智商,扫得干净、扫得快!
首期拆解的米家扫地机器人并非只是简单的拆解,而是通过拆解分析、整机(射频)数据测试,让大家从更深入的技术角度了解它的工作原理,以及选购它是否值当。
工具/原料小米扫地机
螺丝刀
整体分析
1外观外观方面,米家扫地机器人采用与众多厂商类似的圆形设计,内置透明尘盒。
顶部采用自主研发360 LDS激光测距传感器。
同时机身外壳还配备雷了达罩、出音孔、出风孔和充电连接点,适合各种居家环境。
扫地机器人底部有3个轮子(2个主轮+1个万向轮)及2把刷子(主刷、边刷),适合各种居家环境。
米家扫地机器人机身厚度为240px,这个高度几乎可以穿入所有家具底部进行清理工作。
扫地机具备自动回充功能,当电量不足以支持清扫任务时,扫地机会自行前往充电处充电。
另外,配件盒内含电源线、充电座和清扫器,座充的设计非常有爱,允许在座充内把多余的线缠绕。
2应用与随机式扫地机器人相比,路径规划的最大优势便在于智商。
基于激光测距的路径规划能力是米家扫地机器人最具竞争力的配置,目前国内具备该能力的机型价格更高。
米家扫地机器人内置12个传感器,将获取的数据信息实时同步到三大处理器,并且模拟人来大脑的思考方式,互相协助,将采集的数据交给SLAM算法,构建房间底图,并实时定位。
根据地图划分区域和规划清扫路径,最终形成先沿着边后Z字形的清扫路径,逐一完成
分区清扫任务。
家庭智能清洁机器人课件

02 家庭智能清洁机器人的工 作原理
机器人结构与组成
机器人主要由主机、遥控器、充 电座、边刷、吸尘器等组成。
主机是机器人的核心部分,包括 处理器、运动系统、导航系统、
传感器等。
遥控器用于控制机器人的操作, 充电座用于给机器人充电,边刷 用于清扫边缘,吸尘器用于吸取
解决方案与未来发展趋势
感知与环境建模
通过研发更先进的传感器技术、计算能力和算法,提高机器人的感知和环境建模能力。同时,利用多种传感器的融合 和互补,提高机器人在复杂环境中的适应性和鲁棒性。
人工智能与机器学习
加强人工智能和机器学习领域的研究,开发更高效、智能的算法和模型。通过深度学习、强化学习等技术,提高机器 人在语义理解、物体识别和避障等方面的能力。同时,结合多种人工智能技术的融合应用,提升机器人的智能化水平。
电池续航与充电 积极探索新型电池技术,提高电池的能量密度和充电速度。同时,研究快速充电技术,实现机器人充电 的快速化和便捷化。此外,可考虑采用无线充电技术,为机器人提供更加灵活的充电方式。
05 家庭智能清洁机器人的实 际操作与体验
家庭智能清洁机器人操作方法
开启/关闭
通常可以通过按下机器人顶部的电源按钮来启动/关闭机器人。部 分机器人可能还支持通过遥控器或语音助手进行远程操控。
家庭智能清洁机器人 课件
目录
CONTENTS
• 家庭智能清洁机器人的工作原理 • 家庭智能清洁机器人的应用场景与优势 • 家庭智能清洁机器人的挑战与解决方案
目录
CONTENTS
• 家庭智能清洁机器人的实际操作与体验 • 家庭智能清洁机器人案例分析
扫地机器人结构详细
扫地机器人结构详细一、机器人主体:扫地机器人的主体通常是一个圆形或方形的外壳,通过这个外壳来保护机器人的内部组件。
外壳一般由耐磨橡胶或塑料材料制成,以便在清扫过程中不会对家具或地板造成损坏。
二、底盘:扫地机器人的底盘是支撑整个机器人的结构,底盘由机器人主体、轮子、支撑架和传动系统等组成。
传动系统采用电机系统将电能转换为机械能,使底盘能够自由行走、转向和进行清扫操作。
三、电机系统:扫地机器人的电机系统分为驱动电机和清扫电机两种。
1.驱动电机:驱动电机通常由直流电机组成,主要用于推动机器人的底盘行走、转向和避障等功能。
驱动电机可以通过传动系统驱动机器人前进、后退、左转和右转,以实现机器人在室内自由行走的能力。
2.清扫电机:清扫电机多采用无刷直流电机,用于驱动清扫器具进行地板清扫。
清扫电机通常具有较高的转速、低噪音和较长的寿命,可以有效清除地板上的灰尘和杂物。
四、感知系统:扫地机器人的感知系统通常由多种传感器组成,用于感知周围环境和识别障碍物,使机器人能够避免碰撞和跌落。
1.碰撞传感器:碰撞传感器可以感知到机器人与物体的接触,当机器人与障碍物碰撞时,会减速或改变行进方向,以避免进一步的碰撞。
2.跌落传感器:跌落传感器用于感知地板的高度,当机器人接近楼梯或台阶边缘时,会发出警报并自动停止,以防止机器人跌落。
3.环境传感器:环境传感器用于感知房间的大小、布局和家具的位置等信息,以帮助机器人规划清扫路径并避开障碍物。
五、控制系统:扫地机器人的控制系统通过接收感知系统的反馈信息,并根据预设的清扫算法来控制机器人的行为。
控制系统通常由中央处理器、记忆单元和输入输出设备等组成。
1.中央处理器:中央处理器是控制系统的核心,负责接收和处理感知系统的数据,并根据预设的算法来控制驱动电机和清扫电机的运行。
2.记忆单元:记忆单元用于存储清扫算法、地图数据和机器人的运行参数等信息,以便机器人能够快速响应和执行任务。
3.输入输出设备:输入输出设备可以接收用户的指令和反馈信息,包括按钮、触摸屏和声音提示等,以提供用户与机器人的交互界面。
ABB 机器人拆装维护(课堂PPT)

图1
⑵ 拆下进回料管和压缩空气管,拔下电气接头
⑶
拆下3颗安装螺钉与锁定支架上的2颗固定螺钉,此时便能把喷枪的主要部件拆卸下 来
图2
⑷ 拆下喷嘴帽,然后拆下喷嘴头,注意喷嘴头上的密封件
17
图3
图4
图3
⑸ 松开锁紧环,将带有连接壳体的旋转室从喷枪上取下
图4
⑹
松开内锁环上的锁紧螺母,将电刷壳体从枪身上滑下,拆卸过程中主要不要触摸盘式 集流环
18
图5
图6
图5
⑺ 拆开连接壳体与旋转室体,注意用于密封的两个O形环
⑻
移除旋转室体后部的卡环,从旋转室体中小心的一次取出气流分配器组件,密封环和 定距环
图6
⑼
断开电气接线,取下电路板,然后拆解气缸组件,拆解气缸组件时注意电磁阀排气软 管与阀针密封件
⑽ 移除三个阀针密封垫片,然后取出阀针
⑾ 阀针移除后,使用专用工具取出密封件和导向针
四轴 - 可以拿起一个对象,将其提起,水平移动,并将其设置或呈现 - 在X,Y,Z空间 - 改变对象的方向沿一 轴(例如偏航)
五轴 - 可以拿起一个对象,将其提起,水平移动,并将其设置 - 在X,Y,Z空间 - 改变对象的方向沿两个轴( 偏航和变桨例如)
六轴 - 可以拿起一个对象,将其提起,水平移动,并将其设置 - 在X,Y,Z空间 - 改变对象的方向沿三个轴( 偏航,俯仰和横滚)。
8
成在喷枪杆上固定好
图6
把喷嘴头装到喷枪末端,利用三个内六角螺钉和特定的螺母来固定喷嘴头基座,拧
9
紧力矩约4Nm
22
11
喷嘴头装好后,把活塞装入气缸,用螺钉将物料阀针固定到各个活塞上,可在螺钉上滴 一滴乐泰胶水,防止螺纹漏气
智能扫地机器人方案ppt课件

1
PRODUCT INTRODUCTION
智能扫地机器人方案
产品背景 工作原理 基本功能
发展前景 核心部件 主要问题
主要种类 组成结构 选择原则
2
1 智能扫地机器人背景
随着国内生活水平的不断提高, 原本一直在欧美市场销售的扫地机器人 也逐步的走入平常百姓家,并且逐步的 被越来越多的人所接受,扫地机器人将 在不久的将来像白色家电一样成为每个 家庭必不可少的清洁帮手。产品也会由 现在的初级智能向着更高程度的智能化 程度发展,逐步的取代人工清洁。
11
THANK YOU
12
9
8 智能扫地机器人主要问题
潮湿的环境下使用,会使电机 受潮发生短路起火;不能把火柴、烟头 等易燃物品吸入扫地机器人;使用的时 间不能过长;不能在易燃易爆的危险场 合使用。
10
9 选择方案公司原则
1、考察公司的历史和工程师的数量及水平 2、看他们公司技术研发实力以及科研方向 3、查询公司的相关成功案例 4、看公司的未来发展定位 5、看公司相关业务人员的配合程度
3
2 智能扫地机器人发展前景
随着科技的发展,越来越多非传统的家电 出现了。如今,智能的清洁机器人渐渐走进了我 们的家庭。目前,各式各样的扫地机器人、吸尘 机器人等家务辅助机器人在网上销售火爆。据业 内专家介绍,目前家务辅助机器人每年以超过 10%的增长速度出现在我们生活中。而且据其提 供的行业数据预计,家庭辅助类机器人市场空间 至少超千亿元。
对外界的感知作用。Hale Waihona Puke 控制部分:相当于人的大脑,起到
连接对肢体的支配。
驱动部分:相当于人的肢体,被控
制起到协调作业。
吸尘部分:在智能吸尘器里面嵌入
清洁机器人机械结构

清洁机器人机械结构
机器人的移动机械结构有轮式、履带式和步行等多种形式。
轮式和履带式机器人适于条件较好的路面环境, 而步行机器人则适于条件较差的路面环境.由于清洁机器人一般用于家庭,路面环境状况良好,因此我们采用轮式机械结构,如图1所示。
图1 机械结构
从图 1 可以看到它是一个四轮的圆形移动机构,中间的两个轮子为整个移动机构的驱动部分,前后为两个万向轮, 虽然机械结构为一个四轮结构, 但是其运动分析和两后轮独立驱动的三轮机器人是完全一样的,采取两驱动轮差速来控制机器人的运行。
扫地机器人零件图及材料明细表说明书
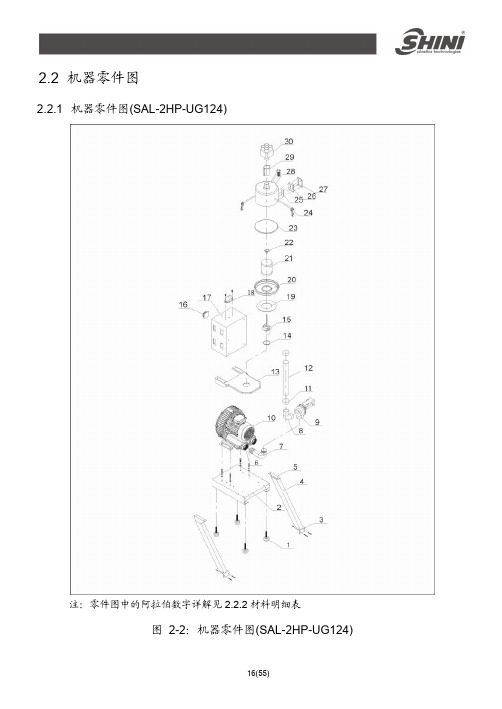
2.2 机器零件图2.2.1 机器零件图(SAL-2HP-UG124)注:零件图中的阿拉伯数字详解见2.2.2材料明细表图2-2:机器零件图(SAL-2HP-UG124)2.2.2 零件材料明细表(SAL-2HP-UG124)表2-1:零件材料明细表(SAL-2HP-UG124)序号名称物料编号序号名称物料编号1 避震脚YW03005000000 16 主电源开关YE102003000002 底座BL26000202420 17 控制箱BH320002002503 立柱下焊块- 18 警报灯YE833051002004 立柱BL26000202920 19 过滤桶盖迫紧YR100300000005 立柱上焊块- 20 过滤桶盖-6 风机法兰- 21 过滤器YR507080000007 入风管BL21000200320 22 梅花螺母YW090516000008 膜片阀接管- 23 过滤桶迫紧YR107080001009 破真空膜片阀BY20015000050 24 弹簧扣YW020********10 高压风机2HP BM30042000050 25 四孔压克力BH3207000005011 管束YW020******** 26 四孔视料窗迫紧YR4000040000012 钢丝胶管YR60157000000 27 四孔视料窗铁片YW0900000040013 过滤桶固定架- 28 过滤桶BL2600020382114 过滤桶底座迫紧- 29 接管器YW2000150080015 过滤桶盖集成- 30 三通-*表示可能损坏的项目;**表示较可能损坏的项目,建议备份。
请在下单采购零配件之前,先确认说明书版本号,以确保零配件物料号与实物一致。
2.2.3 机器零件图(SAL-3.5HP/5HP(-D)-124)注:零件图中的阿拉伯数字详解见2.2.4材料明细表图2-3:机器零件图(SAL-3.5HP/5HP(-D)-UG124)2.2.4 零件材料明细表(SAL-3.5HP/5HP(-D)-UG124)表2-2:零件材料明细表(SAL-3.5HP/5HP(-D)-UG124)序号名称物料编号序号名称物料编号1 避震脚Ф50 YW03005000000 22 过滤桶集成-2 平垫圈8 YW66082200100 23 压克力六孔YR400012000003 螺母M12 YW64012100000 24 视料窗迫紧六孔YR400006000004 底座BL21003500120 25 视料窗铁片六孔YW090006000005 入风管BL26003506520- 26 蝶形螺母5/16″YW090516000006 风机法兰- 27 平垫圈8 YW660822001007 破真空膜片阀1.5″BY20015000050 28 滤清器固定片BL210035005208 破真空膜片阀接管BL21003500420 29 过滤器ADC2 YR501811000009 立柱下焊块- 30 吸风管-10 右立柱BL26003506620 31 管夹YW0700020000011 立柱上焊块- 32 过滤桶盖集成-12 弹簧扣YW020******** 33 警报灯LTE-3051AC220V YE83305100200高压风机3.5HP BM30053500050 34 控制底板-高压风机5HP BM30055000050 35 控制箱盖板-13高压风机5HP双段YM30433700000 36 主电源开关YE1021030000014 集尘桶BL26003507021 37 控制箱体BL2600350532115 压克力四孔YR40001200100 38 线夹具固定板-16 视料窗迫紧四孔YR40000400000 39 过滤桶固定架-17 视料窗铁片四孔YW09000000400 40 电控箱固定块-18 管束2.5″YW020******** 41 接管器YW2000200070019 钢丝胶管2″YR60205000100 42 三通-20 集尘桶迫紧YR10708000100 43 左立柱BL2600350662021 过滤桶圈BL19003500120*表示可能损坏的项目;**表示较可能损坏的项目,建议备份。
100张拆机图带你窥探科沃斯CR120扫地机器人

100张拆机图带你窥探科沃斯CR120扫地机器人内部结构做工流程一样,先还是外观顶面简洁底面自然内容多,随后一一分解贴纸铭牌对比包装箱的贴纸,一共3个产品名称!后面的出风口还有一个直插充电口,标配24V电源可以直插充电底面细节前滚轮和充电片,充电片是自动回家充电,与充电座的充电口接触用的俩扫把之一,右侧位,软的右侧轮子,上下位置有伸缩性,带检测功能:工作时抬起扫地机会停机中部的吸尘进风口前侧底部的悬崖传感器,看样子就是红外反射原理总电源开关前面的保险杠,活动部件,上边是红外滤光窗,下边是橡胶防撞条顶面前部的360度红外接收窗顶面按键区,集成了按键、红外接收器和状态指示灯打开舱盖,黑色的是储灰仓有把手,提出储灰仓后的样子,黑色部分直通吸尘进气口储灰仓比较厚实进气口有挡片,避免灰尘、杂物掉出去出气过滤口过滤片储灰仓是这样打开的全部零部件继续拆主机电池仓在吸尘进气口和前轮之间,取下仓盖12串镍氢电池组参数电池组接口电池组特写和充电钻比比大小拆下两个扫把因旋转方向不同,有左右之分扫把驱动轴拆掉电池、扫把后的主机拆主机前,先要拆前面保险杠上的挡条(挡条用来限制保险杠的活动位置)拆下的保险杠挡条再拆底盘螺丝,拆开了先看上盖按键板取下来中间是红外接收器,LED1是绿+橙光、LED2是红光看符号,缺的是二极管吧。
按键很普通,估计PCB是通用的,这型号有个按键可能没有用剩下的按键帽储灰仓舱盖铰链部分上盖后部是风机拆掉5颗螺丝,螺丝连接部位有橡胶减震垫取下的风机组件电机标识电机PCBA,就是保险和电容出风口扇叶整个一圈密封圈,防漏气用被压扁的电机线再看底盘PCBA电机位置传感器,就是个微动开关充电口连接方式(请无视灰尘)总电源开关接线仔细瞧瞧PCBA主控:意法基于ARM的32位MCU,型号STM32F07这应是右侧电机驱动电路,左侧应是两个MOS管组成的桥左侧的驱动这部分估计是电源/充电部分板子下边没有件,看有很多图形,估计是通用电路板保险杠360度红外接收器PCBA接收窗红外接收器接收窗光学组件,与充电座上的相同保险杠内侧的耐磨塑料片正面的右侧的障碍传感器(也是红外LED对),下面是碰撞连杆敲击微动开关正面的红外对左侧有2组障碍传感器,原因是绕墙角模式是以左转进行的悬崖传感器,这就没拆了最后看看轮子组件电机板测速的光栅装好测试OK顺便拍了下回家的照片对好位,爬向充电座,这是是扫把要慢速转快爬上充电座了到位后就停机,进入充电模式。
张拆机图带你窥探科沃斯CR扫地机器人
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式100张拆机图带你窥探科沃斯CR120扫地机器人内部结构做工流程一样,先还是外观顶面简洁底面自然内容多,随后一一分解贴纸铭牌对比包装箱的贴纸,一共3个产品名称!后面的出风口还有一个直插充电口,标配24V电源可以直插充电底面细节前滚轮和充电片,充电片是自动回家充电,与充电座的充电口接触用的俩扫把之一,右侧位,软的右侧轮子,上下位置有伸缩性,带检测功能:工作时抬起扫地机会停机中部的吸尘进风口前侧底部的悬崖传感器,看样子就是红外反射原理总电源开关前面的保险杠,活动部件,上边是红外滤光窗,下边是橡胶防撞条顶面前部的360度红外接收窗顶面按键区,集成了按键、红外接收器和状态指示灯打开舱盖,黑色的是储灰仓有把手,提出储灰仓后的样子,黑色部分直通吸尘进气口储灰仓比较厚实进气口有挡片,避免灰尘、杂物掉出去出气过滤口过滤片储灰仓是这样打开的全部零部件继续拆主机电池仓在吸尘进气口和前轮之间,取下仓盖12串镍氢电池组参数电池组接口电池组特写和充电钻比比大小拆下两个扫把因旋转方向不同,有左右之分扫把驱动轴拆掉电池、扫把后的主机拆主机前,先要拆前面保险杠上的挡条(挡条用来限制保险杠的活动位置)拆下的保险杠挡条再拆底盘螺丝,拆开了先看上盖按键板取下来中间是红外接收器,LED1是绿+橙光、LED2是红光看符号,缺的是二极管吧。
按键很普通,估计PCB是通用的,这型号有个按键可能没有用剩下的按键帽储灰仓舱盖铰链部分上盖后部是风机拆掉5颗螺丝,螺丝连接部位有橡胶减震垫取下的风机组件电机标识电机PCBA,就是保险和电容出风口扇叶整个一圈密封圈,防漏气用被压扁的电机线再看底盘PCBA电机位置传感器,就是个微动开关充电口连接方式(请无视灰尘)总电源开关接线仔细瞧瞧PCBA主控:意法基于ARM的32位MCU,型号STM32F07这应是右侧电机驱动电路,左侧应是两个MOS管组成的桥左侧的驱动这部分估计是电源/充电部分板子下边没有件,看有很多图形,估计是通用电路板保险杠360度红外接收器PCBA接收窗红外接收器接收窗光学组件,与充电座上的相同保险杠内侧的耐磨塑料片正面的右侧的障碍传感器(也是红外LED对),下面是碰撞连杆敲击微动开关正面的红外对左侧有2组障碍传感器,原因是绕墙角模式是以左转进行的悬崖传感器,这就没拆了最后看看轮子组件另一面电机板测速的光栅全家福装好测试OK顺便拍了下回家的照片对好位,爬向充电座,这是是扫把要慢速转快爬上充电座了到位后就停机,进入充电模式。
100张拆机图带你窥探科沃斯CR120扫地机器人
100张拆机图带你窥探科沃斯CR120扫地1、简介科沃斯CR120扫地是一款智能家居清洁设备,能够自动扫地并清除地面上的灰尘和污垢。
本文档将通过100张拆机图,详细介绍该的内部结构和工作原理。
2、外观与部件2.1 外观图2.2 尺寸和重量2.3 上的按键和指示灯2.4 底部部件说明2.5 配套充电器和充电座说明3、内部结构3.1 底部拆解图3.2 电池和电源管理模块3.3 滚刷和吸尘口3.4 清洁模块和集尘箱3.5 碰撞传感器和红外线传感器3.6 定位模块和导航系统4、工作原理4.1 充电与充电保护机制4.2 清扫与吸尘机制4.3 碰撞回避和边缘检测原理4.4 定位与导航算法4.5 清洁模式设置和用户交互5、使用方法5.1 充电和放置充电座5.2 开机和关闭5.3 设置清洁模式和时间计划5.4 手动操作和遥控模式5.5 清洁维护和部件更换6、故障排除6.1 无法充电6.2 清扫效果不好6.3 碰撞传感器失灵6.4 导航出错7、配件与维修7.1 常用配件名称和编号7.2 配件购买和更换方法7.3 维修保养注意事项8、法律名词及注释8.1是指能够执行某些预先设定任务的自动化机械设备。
8.2 滚刷滚刷是底部的旋转刷子,用于清扫地面上的灰尘和污垢。
8.3 吸尘口吸尘口是底部的进气口,通过负压吸入地面上的灰尘和污垢。
8.4 碰撞传感器碰撞传感器是底部用于检测障碍物和避免碰撞的传感器。
8.5 定位模块定位模块是用于确定自身位置和导航的模块,通常包括激光传感器或摄像头。
9、本文档涉及附件附件1:外观图:zip附件2:底部拆解图:zip附件3:清洁模块更换说明:pdf。
家庭智能清洁机器人课件

家庭智能清洁机器人将与智能家居生态系统深度融合,与其他智能家 居设备实现互联互通,提供更加便捷、智能的家庭生活体验。
社会影响
提高生活品质
家庭智能清洁机器人的普及将极 大地提高人们的生活品质,减轻 家务负担,让人们有更多的时间
享受生活。
创造就业机会
随着家庭智能清洁机器人的发展, 将产生更多的相关就业机会,包括 机器人研发、生产、销售和服务等 。
家庭智能清洁机器人课件
目录
CONTENTS
• 家庭智能清洁机器人概述 • 家庭智能清洁机器人的技术原理 • 家庭智能清洁机器人的功能与优势 • 家庭智能清洁机器人的市场分析 • 家庭智能清洁机器人的未来展望 • 家庭智能清洁机器人的使用与维护
01
CHAPTER
家庭智能清洁机器人概述
定义与特点
定义
02
同时,机器人还支持语音控制和 智能交互功能,用户可以通过语 音指令或手机应用程序进行控制 和操作,使用方便、简单易用。
04
CHAPTER
家庭智能清洁机器人的市场 分析
市场现状
家庭智能清洁机器人市场正在快速增长,随着消费者对家庭清洁需求的增加以及对 科技产品的接受度提高,市场需求不断扩大。
目前市场上的家庭智能清洁机器人主要集中在地宝、窗宝、门宝等细分领域,产品 种类丰富,功能齐全,能够满足不同消费者的需求。
03
提升机器人自主性,实现更高效的任务执行。
物联网技术
物联网通信协议
Wi-Fi、蓝牙、ZigBee等。
物联网技术的应用
远程控制、数据同步、设备联动等。
物联网技术对机器人的影响
实现机器人与智能家居系统的互联互通,提升家庭生活的便利性。
智能扫地机器人结构图片拆解及选材PPT课件

齿轮材质: POM
材质:?
Star Plastics
5
第5页/共8页
二 .智能扫地机器人主体拆解图片及选材
5.红外传感器总成结构
红外透 光PC
Star Plastics
6
第6页/共8页
Thank You
Star Plastics
7
第7页/共8页
感谢您的观看!
Star Plastics
2
第2页/共8页
二 .智能扫地机器人主体拆解图片及选材
2.主体内部部结构
边刷 驱动轮
主板
红外感 应总成
开关控 制面板
Star Plastics
3
第3页/共8页
二 .智能扫地机器人主体拆解图片及选材
3.驱动轮结构
材质:?
齿轮材质: POM
材质:?
Star Plastics
4
第4页/共8页
二ቤተ መጻሕፍቲ ባይዱ.智能扫地机器人主体拆解图片及选材
一.智能扫地机器人部件组成
主体
Star Plastics
1
第1页/共8页
二 .智能扫地机器人主体拆解图片及选材
1.主体外部结构
主体上盖材质:ABS 喷漆/白色 主体下盖材质: PP+talc;ABS
电池盖材质: ? 储尘盒材质: PC 遥控器材质:?
电源适配器材质:?
充电座材质:?
滤网盒材质:?
Star Plastics
8
第8页/共8页
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5
二 .智能扫地机器人主体拆解图片及选材
4.边刷总成结构
齿轮材质: POM
材质:?
Star Plastics
6
二 .智能扫地机器人主体拆解图片及选材
5.红外传感器总成结构
红外透 光PC
Star Plastics
7
Thank You
Star Plastics
8
充电座材质:?
滤网盒材质:?
Star Plastics
3
二 .智能扫地机器人主体拆解图片及选材
2.主体内部部结构
边刷 驱动轮
主板
红外感 应总成
开关控 制面板
Star Plastics
4
二 .智能扫地机器人主体拆解图片及选材
3.驱动轮结构
材质:?
齿轮材质: POM
材质:?
Star Plastics
智能扫地机器人图片拆解及选材
Star Plastics
1
一.智能扫地机器人部件组成
主体
Star Pla体拆解图片及选材
1.主体外部结构
主体上盖材质:ABS 喷漆/白色 主体下盖材质: PP+talc;ABS
电池盖材质: ? 储尘盒材质: PC 遥控器材质:?
电源适配器材质:?