2015-雷达原理第三讲
雷达原理第3章

第3章雷达接收机
发射脉冲 噪声
被噪声淹 没的信号
图3.3 显示器上所见到的信号与噪声
第3章雷达接收机
目前, 超外差式雷达接收机的灵敏度一般约为(10-12~10-14)W, 保证这个灵敏度所需增益约为106~108(120 dB~160 dB), 这一增 益主要由中频放大器来完成。
第3章雷达接收机
2. 接收机的工作频带宽度
接收机的工作频带宽度表示接收机的瞬时工作频率范围。 在复杂的电子对抗和干扰环境中, 要求雷达发射机和接收机具有 较宽的工作带宽, 例如频率捷变雷达要求接收机的工作频带宽度 为(10~20)%。接收机的工作频带宽度主要决定于高频部件(馈线 系统、高频放大器和本机振荡器)的性能。 需要指出, 接收机的 工作频带较宽时, 必须选择较高的中频, 以减少混频器输出的寄 生响应对接收机性能的影响。
在图3.2中, 灵敏度时间增益控制(STC)使接收机的增益在发 射机发射之后, 按R-4规律随时间而增加, 以避免近距离的强回波 使接收机过载饱和。灵敏度时间控制又称为近程增益控制, 可以 加到高频放大器和前置中频放大器中。自动增益控制(AGC)是 一种反馈技术, 用来自动调整接收机的增益, 以便在雷达系统跟 踪环路中保持适当的增益范围。
un2 4kTRB
(3.2.1)
第3章雷达接收机
式中,k为玻尔兹曼常数, k=1.38×10-23J/K; T为电阻温度, 以绝对 温度(K)计量, 对于室温17℃, T=T0=290K; R为电阻的阻值; Bn为 测试设备的通带。
雷达基本工作原理课件

雷达的分类
01
脉冲雷达
发射脉冲信号,通过测量脉冲 信号往返时间计算目标距离。
02
连续波雷达
发射连续波信号,通过测量信 号频率变化计算目标距离和速
度。
03
合成孔径雷达
利用高速平台对目标区域进行 扫描,形成高分辨率的合成孔
径图像。
雷达的应用
军事侦察
利用雷达探测敌方军事目标,如飞机、 坦克等。
气象观测
指雷达在存在欺骗干扰的情况下,仍能正常工作并检测到目标的能力 ,通常由信号鉴别和抗干扰算法决定。
多目标处理能力
跟踪能力
指雷达在同一时间内能够跟踪的 目标数量,通常由数据处理能力 和硬件资源决定。
分辨能力
指雷达在同一时间内能够分辨的 目标数量,通常由信号处理算法 和天线波束宽度决定。
05
雷达技术的发展趋势
天线是雷达系统的辐射和接收单元,负责发射和接收电磁波。
波束形成是天线的重要技术,通过控制天线阵列的相位和幅度,形成具有特定形状 和方向的波束。
天线的性能指标包括方向图、增益、副瓣电平和极化方式等。
信号处理与数据处理
信号处理是雷达系统的关键技术之一,负责对接收到的回波信号进行处 理和分析。
数据处理负责对雷达系统获取的数据进行进一步的处理、分析和利用。
当目标相对于雷达移动时,反 射的电磁波频率会发生变化, 这种变化被雷达接收并转换为 目标的相对速度。
速度测量的精度受到多普勒效 应的影响,而分辨率则受到雷 达工作频率和采样率的影响。
03
雷达系统组成
发射机
发射机是雷达系统的核心组件之 一,负责产生高功率的射频信号
。
它通常包括振荡器、功率放大器 和调制器等组件,用于将低功率 信号放大并调制为所需的波形。
雷达系统原理PPT课件
双重目标图像
• 当本船附近有一个大的反射面并处于与本船接近垂直的距离时 (如,本船正从一 艘大船旁边经过,等),雷达电波在本船与其 他船之间反弹。因此,2 到 4 个图 像可能会等距离的出现在目标 的方向上。由于多重反射造成的假图像被称为“双 重目标” 。 出现这种情况时,离本船最近的回波图像为真正的目标。 可以注 意到,当本船与相关目标的距离和方位发生变化时,双重目标也 会消失。 因此,这种假回波图像很容易就能区分出来。
脉冲(波束)宽度
• 脉冲宽度是指在主瓣中辐射功率密度为最大辐射功率密度(-3dB) 的一半的角(也 被称为“半值宽度”
雷达无线电波特性
• 雷达的无线电波略沿地表方向传播(主要视线)。这一特性的变 化取决于ቤተ መጻሕፍቲ ባይዱ气的 密度,其一般的计算公式如下所示,总之,雷达 的视线距离 D 比光学视距要长 约 6%。
携带 SART 船的实际位置
• 若本船位于 SART 位置的 1 海里以外, • 第一道显示的回波位置为距 SART0.64 海里 • 第 12 道回波为 SART 的实际位置。 • 若本船进入 SART 1 海里以内范围, • 显 示的扫描速度加快, • 该回波的长度为距 SART 实际位置 150 米。
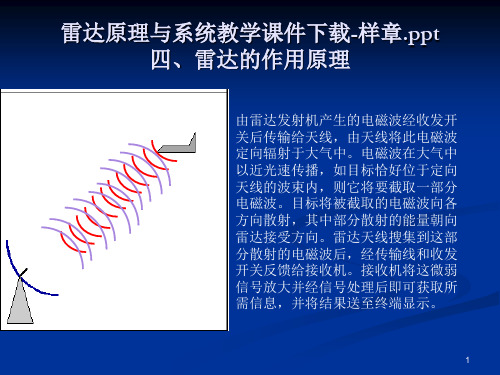
雷达系统原理
什么是雷达系统?
• 雷达是从天线发射称为微波的甚高频无线电波的导航设备。发射 的无线电波经过 目标(如其他船,浮标,小岛等)反射回来,并 通过相同的天线接受后转换为电 信号。再将这些电信号发送给显 示单元进行显示。雷达使在夜晚或大雾的情况下 发现视线以外的 目标成为可能,并可以使船避免一些潜在的危险。 由于天线发射 的同时在旋转,这样就使本船周边的情况便一目了然。 雷达发射 的微波信号被称为脉冲信号,发射和接收这些信号是交替进行的。 一次 360 度的旋转就有上千的脉冲信号被发射和接收。
雷达原理复习PPT课件
1、已知某雷达最大作用距离为150Km,雷达天线的高度为10m,距雷达60Km处有一高度为 100m的目标,问:此时雷达是否可以观察到此目标? Rs=4.1*(+)=4.1*13.16=53.956km 则Rmax=min(Rs,Rmax)=min(53.956,150)-53.956km 因53.956<60,则雷达不能观察到此目标 2、已知某雷达无衰减时的最大作用距离为100Km,问当单程传播衰减为0.4dB/Km时,则雷 达的实际最大作用距离是多少? 有衰减时最用距离计算图,读图知答案 3、在目标尺寸比雷达工作波长大很多的情况下,要降低云雨回波对雷达测距性能的影响, 应降低还是提高雷达的工作频率? 要降低云雨回波时对雷达测距性能的影响,应降低雷达的工作频率,为了提高工作波长, 即要降低f,可减小云雨回波的影响,而又不会明显减小正常雷达目标的截面积。
6
7
• 4、什么是相参积累和非相参积累,并说明二者对检测因子的影响。
• 相参积累:信号在中频积累时要求信号见有严格的相位关系
• 非相参积累:由于信号在包络检波后失去了相位信息而只保留下幅度信息,因而检波后积累就不需要信号间 有严格的相位关系。
• 对非相参积累:M个等幅脉冲积累后对检波因子Do的影响是:
• 接收机的灵敏度体现接收机的接收微弱信号的能力
• 灵敏度的物理意义:表示接收机可接收到最小可测信号功率的能力
• 动态范围:体现接收机的抗过载性能
• 噪声系数:体现接收机的噪声性能
雷达原理--第3章--yzd
Cn a L0 M
2 4/3
2
• L0是湍流外尺度;M是水平折射率的垂 直梯度;a为一无量纲常数
大气的镜式反射
• 当大气中折射率水平分布比较均匀,而 垂直方向存在很大梯度结构时,会引起 雷达波的反射,这种反射称为费涅尔反 射,也称作部分反射或镜式反射 • 对于两侧具有一定差值的过渡层而言, 层越薄,或者波长越长,反射系数也就 越大
等效反射率因子
• 等效反射率因子气象雷达方程保持瑞 利散射的简单形式
2
m 1 Ze Z 10 5 2 m 2
4 2 6
Mi
球形干冰粒对雷达波的散射
• 瑞利散射:水滴 100 散射是同半径冰 粒散射的五倍 • 米散射: 10 大冰球粒子的雷 达截面甚至比同 体积水球大10倍, 1 大冰雹时回波特 别强
3.2cm
0.1
3.4 晴空回波的散射和反射机制
湍流大气对雷达波的散射
• 不同尺度的湍流块相当于具有不同间距 的空间衍射光栅,而不同间距的衍射光 栅对于不同的散射角上的散射能量有明 显的贡献,也即恰巧可以在该方向上形 成衍射的“亮点” • 湍流大气对雷达波的反射率:
0.39c
2 1 / 3 n
多普勒频移 vs 径向速度/波长
频率稳定度
• 频率稳定度:Δf/f • 长期频率稳定度: 几小时[/天/月/年],公共频率源系统, 如卫星。 • 短期频率稳定度: 小于1S时间内的Δf/f,雷达中要求 Δf/f=10-9~10-12。
速度分辨率
• 速度分辨率: 频率不定度造成的速度不可分辨范围 • 测速分辨率 vs 频率稳定度
K 15.7 10 km
• 等效地球半径 Rm 0
《雷达基本工作原理》PPT课件-2024鲜版

雷达抗干扰与隐身技术探讨
2024/3/27
15
常见干扰类型及抗干扰措施
有源干扰
通过发射与雷达信号相似的干扰信号,使雷达难以区分目标回 波和干扰信号。
无源干扰
利用反射、散射等方式,使雷达信号偏离目标或产生虚假目标。
2024/3/27
16
常见干扰类型及抗干扰措施
01
02
03
信号处理技术
采用先进的信号处理技术, 如脉冲压缩、动目标检测 等,提高雷达抗干扰能力。
2024/3/27
36
《雷达基本工作原理》PPT课件
$number{ 01}
2024/3/27
1
目 录
• 雷达概述 • 雷达基本组成与工作原理 • 雷达探测目标与定位技术 • 雷达抗干扰与隐身技术探讨 • 新型雷达技术发展趋势展望 • 总结回顾与课程安排建议
2024/3/27
2
01 雷达概述
2024/3/27
3
雷达定义与发展历程
03
通过发射宽带信号和接收回波信号,实现距离向 高分辨率。
25
合成孔径雷达(SAR)成像原理及优势分析
• 结合数字信号处理技术,对回波信号进行聚焦处理,得到 目标的高分辨率图像。
2024/3/27
26
合成孔径雷达(SAR)成像原理及优势分析
1 2
高分辨率 SAR成像技术可获得米级甚至厘米级的高分辨率 图像。
学术期刊
01
推荐学生阅读《雷达科学与技术》、《电子与信息学报》等学
术期刊,了解雷达领域的最新研究进展。
网络课程
02
推荐学生参加中国大学MOOC、网易云课堂等网络平台上的雷
达相关课程,拓宽知识面。
雷达一些基本原理PPT课件
1弧度=57度= 1000毫弧度 1毫弧度=0.057度
8
注意:关于真北的概念及三北方向*
我国通用的标准方向有真子午线方向、 磁子午线方向和坐标纵轴方向,简称 为真北方向、磁北方向和轴北方向, 即三北方向。
南宁 0°50‘ 湛江 0°44’ 海口 0°29‘ 拉萨 0°21’ 珠穆朗玛 0°19‘西沙群岛0°10‘曾母暗沙 0°24‘(东) 南沙群岛 0°35’(东) 乌鲁木齐 2°44'(东) 东沙群岛 1°05‘
15
三、测速原理
当目标相对于RD运动后,出现△fD(回 波相对于发射ft 的频率偏移),此时, 目标相对于RD的径向速度为:
VR
1
2
fD
式中
VR——目标与雷达的相对(径向)速度 0
(m/s)
λ ——RD工作波长(m) fd ——双程多普勒频率(Hz)
v
地平线 D
在海上, 速度单位俗称为“节 ”(1Kn), 即1 n mile / h
16
两个概念:多普勒频移与径向速度
1、多普勒频移:当目标物与雷达之间存在相对运 动时,接收到回偏移,这个频 率偏移在物理学上称之为多普勒频移
1.真子午线方向: 通过地球表面某点的真子午线的切线方向 ,称为该点的真子午线方向,即真北方向。 它是通过天文测量或用陀螺经纬仪测定的。
9
2.磁子午线方向:
通过地球表面某点的磁子午线的切线方向称为 该点的磁子午线方向,即磁北方向。它是用罗 盘仪测定的,磁针在地球磁场的作用下自由静 止时所指的方向即为磁子午线方向。
1
南京理工大学雷达原理课件3-4章(6in1彩色)

2013年
第1章 绪论
• 噪声系数
3.2 接收机的噪声系数和灵敏度
– 定义1:因存在内部热噪声,接收机(前端)的输 出SNR 低于 输入SNR 的倍数,或
– 定义2:接收机的输出额定噪声功率 高于 无噪 “理想接收机”的输出额定噪声功率的倍数
F = Si / Ni = No > 1 So / N o NiGa
– 级联电路的总噪声系数为
F0
=
F1
+
F2 − 1 G1
+
F3 − 1 G1G2
+L+
Fn − 1 G1G2 LGn−1
• 接收机总噪声系数F0↓,要求各级Fi↓ 且 Gi↑
• 接收机总噪声系数F0 主要取决于最前几级的内 部噪声,级数越靠前,影响越大
– 接收机第一级:低噪声 高增益 高频放大器
南京理工大学电光学院电子工程系 许志勇
2013年
第1章 绪论
3.1 雷达接收机的组成和重要质量指标
• 微电子化和模块化结构
– 有源相控阵雷达通常需要几十至几千路、幅相一 致性要求很严格的接收机通道,需采用微电子化 和模块化的接收机结构(性能一致性要求)
– 优选方案
• 采用单片集成电路,包括微波单片集成模块 (MMIC)、 中频单片集成模块(IMIC)和专 用集成电路(ASIC)
2013年
第1章 绪论
3.1 雷达接收机的组成和重要质量指标
• 中频的选择和滤波特性
– 中频的选择与发射波形特性、 接收机工作带宽以 及现有的高频和中频部件的性能有关
– 较高的中频适于宽频带工作的接收机
– 中频滤波特性是减小接收机噪声的关键参数,其 带宽过大或过窄都将降低接收机信噪比,前者引 入过多噪声,后者会有信号能量损失
雷达系统工作原理详解

雷达系统工作原理详解雷达(Radar)是一种利用电磁波进行探测和测距、测速的技术。
它在军事、航空、航海、气象等领域有着广泛的应用。
雷达系统工作原理的详解需要从雷达信号的发射、接收、处理以及相关参数的计算等方面进行说明。
一、雷达信号的发射雷达系统通过发射器产生一定频率和功率的电磁信号。
这些信号经过调制和放大后,通过天线辐射出去。
在雷达系统中,常用的发射方式有连续波、脉冲波和调频连续波等。
这些发射方式在不同的应用场景下有不同的优劣。
二、雷达信号的接收当雷达信号与目标相交时,目标周围的物体会散射回一部分信号。
雷达系统的接收器将接收到的信号经过放大和滤波等处理后,送入雷达信号处理系统进行后续的分析和计算。
雷达接收信号的质量直接影响到后续处理的准确性和可靠性。
三、雷达信号的处理雷达信号处理是雷达系统中非常重要的环节。
在接收到信号后,雷达信号处理系统对信号进行解调、滤波、增益控制和目标特征提取等操作,以获取目标的位置、速度、方位等信息。
这些操作包括了数字信号处理、自适应波形设计和信号重建等技术。
四、雷达参数的计算雷达系统通过测量信号的往返时间、多普勒频移等参数,计算得到目标的位置、速度和方位等信息。
根据测量原理的不同,雷达系统分为无源雷达和有源雷达。
无源雷达主要利用接收到的信号特性来计算目标的信息,而有源雷达则需要发送一定的信号后,通过信号的回波来计算目标信息。
总结:雷达系统工作原理的详解包括了信号的发射、接收、处理以及相关参数的计算等方面。
通过这些环节的操作,雷达系统可以准确地感知目标的位置、速度和方位等信息。
随着科技的发展,雷达系统在军事、航空、航海、气象等领域的应用将会不断地扩展和改进。
雷达第三章讲解

空气密度和湿度
– Rain rate
降雨率
– Fog/cloud water content
雾/云的含水量
– Index of refraction
折射率
• Earth’s surface – Surface material (water vs land) – Surface roughness (waves, mountains) – Earth’s curvature
地表 表面物质(水与土地) 表面粗糙度(水波,山)
地球曲率
Atmospheric Attenuation at Sea Level 海平面的大气衰减
Radar power absorbed by water vapor and oxygen 水蒸气和氧气吸收雷达能量
Attenuation is a loss of power characterized by L in radar range equation 雷达距离方程中L代表功率 的衰减
• Atmospheric refraction 大气折射
Interference Basics 干扰的基础
• Two waves can interfere constructively or destructively 两个波可以建设性或破坏性的干扰
• Resulting field strength depends only on relative amplitude 产生的磁场强度只取决于相对振
超折射
的影响
管道 4 / 3地球半径
管道对目标检测的影响
表面无管
发现目标 没有看到目标
表面有 管
管道延伸低空探测范围,但可以 引起在雷达覆盖面的意想不到的孔
雷达原理及系统复习(课堂PPT)

• 测角的方法:相位法,振幅法。
利用相位响应进行测角
.
利用振幅响应进行测角
40
• 相位法测角原理
利用多个天线所接收到的回波信号间的相位差测角
实现方法:将两天线收到的高频信号与同一本振差 频后在中频上比相。
.
Hale Waihona Puke 41• 测角误差与多值性问题
测角误差
当 ,此时 , 可能超出2π, 解决方法 三天线测角
实际读数
.
13
雷达发射机的任务和基本组成
• 任务 产生大功率的特定调制的电磁振荡即射频信号
• 组成
单级振荡式 大功率电磁振荡产生与调制在一个器件中同时完成 主振放大式 先产生小功率的CW 振荡,再分多级调制和放大
.
14
雷达发射机的性能指标
• 输出功率
输出信号功率
平均功率 峰值功率
单位时间内发出的功率能量Pav ,脉冲重复周 期内的输出平均功率。
v
vr
R ctr 2
fd
2vr
vr vcos
.
10
雷达的工作频率
f =c /λ
只要是通过辐射电磁能量,利用从目标反射回来的回波 对目标探测和定位,都属于雷达系统的工作范畴。
常用雷达工作频率范围:220MHz~35GHz 天波超视距雷达(OTHR):4MHz~5MHz 地波超视距雷达:2MHz 毫米波雷达:94GHz 雷达频段划分和对应频率-- 书P7,表1.1
虚警概率一定时,发现概率Pd才随信噪比的增加 而增加,因此检测系统要求虚警保持一个恒定的 值;但随着噪声电压的变化,其包络振幅的概率 密度可能会发生变化,导致一定门限值的虚警概 率Pfa发生变化,从而使得在给定信噪比下得不到 所需的发现概率。所以,噪声电平变化时,系统 门限电平应相应变化以获得恒虚警。
导航雷达第三章雷达设备发射机双工器天线
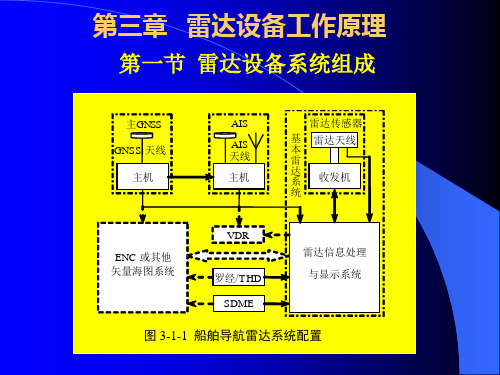
6、信息处理与显示系统(显示器):
对接收系统输出的视频回波进行处理,去除各种干扰,将目标 回波按目标的实际距离和方位显示在荧光屏上,并配有测量系统供 随时测量,获得需要的避碰和导航信息。
7、雷达电源:把船电变成雷达所需的中频交流电。
400 ~ 2000 Hz
触发 脉冲
t
发射 脉冲
雷达信号 基本处理流程
1.作用:产生大功率超高频微波振荡(正弦波)
2.组成:阴极和灯丝、阳极、输出耦合系统、磁铁
作用空间 阳极 输出环1)灯丝加6.3 V交流电压,加热阴极使其发射电子 2)阳阴极间加高压电场:阳极接地,阴极加万伏高压
3)必须加永久恒定强磁场 4)输出负载阻抗匹配,保证功率和频率稳定
t Δt
回波 脉冲 HL 扫描线 EBL 雷达屏幕
t
图3-1-3 雷达信号流程
第二节
雷达 电源
雷达发射系统
特高压 至天线
发 射开关 延 时开关 安全开关 定时器 调制器 磁控管 双工器
发射系统
量程选择 脉宽选择 至显示系统 至接收系统 其他输出
至接收系统
图3-2-1 雷达发射系统
雷达磁控管振荡器
雷达发射系统主要技术指标
(一)工作波段
表 3-2-1 雷达工作波段
波段名称 S(或 3 cm) X(或 10 cm) 波长范围(cm) 10.34~9.70 3.23~3.16 频率范围(GHz) 2.9~3.1 9.3~9.5
X波段:测距精度高;S波段:抗干扰能力强,作用距离远。
根据SOLAS公约,所有不论尺度大小的客船和介于 300~3 000 GT的船舶,必须至少安装一部3 cm雷达;3 000 GT 及以上船舶,必须安装第二部10 cm雷达,或在主管机关认可 下,安装第二部3 cm雷达。
雷达原理第三章
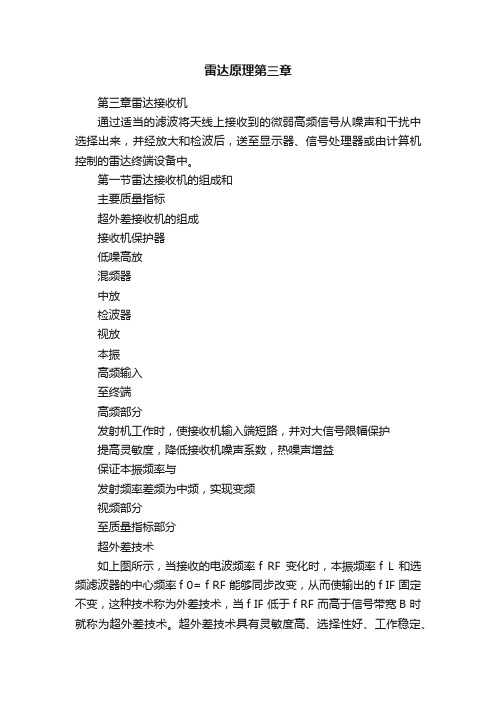
雷达原理第三章第三章雷达接收机通过适当的滤波将天线上接收到的微弱高频信号从噪声和干扰中选择出来,并经放大和检波后,送至显示器、信号处理器或由计算机控制的雷达终端设备中。
第一节雷达接收机的组成和主要质量指标超外差接收机的组成接收机保护器低噪高放混频器中放检波器视放本振高频输入至终端高频部分发射机工作时,使接收机输入端短路,并对大信号限幅保护提高灵敏度,降低接收机噪声系数,热噪声增益保证本振频率与发射频率差频为中频,实现变频视频部分至质量指标部分超外差技术如上图所示,当接收的电波频率f RF 变化时,本振频率f L 和选频滤波器的中心频率f 0= f RF 能够同步改变,从而使输出的f IF 固定不变,这种技术称为外差技术,当f IF 低于f RF 而高于信号带宽B 时就称为超外差技术。
超外差技术具有灵敏度高、选择性好、工作稳定、中频部分可标准化等优点。
选频滤波混频器本振滤波解调滤波无线电波解调输出f Lf IFf RF返回框图高频部分:(1)T/R 及保护器:发射机工作时,使接收机输入端短路,并对大信号限幅保护。
(2)低噪声高放:提高灵敏度,降低接收机噪声系数,热噪声增益。
(3)Mixer ,LD ,AFC :保证本振频率与发射频率差频为中频,实现变频。
返回框图中频部分及AGC:(1)匹配滤波:(2)AGC:auto gain control.视频部分:(1)检波:包络检波,同步(频)检波(正交两路),相位检波。
(2)放大:线性放大,对数放大,动态范围。
返回框图主要质量指标1.灵敏度:S imin,用最小可检测信号功率S imin表示,检测灵敏度,给定虚警概率P fa,达到指定检测概率P d 时的输入端的信号功率:通常所需接收机gain= 120 ~ 160 dB,S imin=-120~-140dbw 主要由中频完成。
2. 工作频带宽度:指瞬时工作频率范围,频率捷变雷达要求的接收机工作频带宽度为10~20% 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G
S o : GSi
N o : G ( N i N amp )
等效噪声温度
Si / N i F S0 / N 0
Si / N i (GSi ) / G ( N i N amp )
N i N amp Ni
1
Tamp Tin
Tin 290k
接收机中的几种主要附属电路 3、时间增益控制(灵敏度时间控制STC)
目的:防止近程杂波引起的中频放大器过载
使偏置电压随时间的变化而变化
4、AFC (自动频率控制)
速调管振荡器所决定的本地振荡频率 fL 混频 本机振荡器
fi Ei
fs
中放 AFC电路
输出
判断与额定中频的偏差
现代接收机的共性要求: 宽频带、低噪声、大动态、高稳定 数字化
信号载频功率的比值
fc
fm
f
针对分布型分量的频谱纯度(dB/Hz):分布性频谱的每单位频带上
的单边带功率与载频功率的比值
L ( f m ) 10 lg
B 带宽内的单边带功率
载频功率
10 lg( B)
(dB/Hz)
典型要求: -80 dB
波形的产生
主要针对线性调频信号 模拟产生方法 有源法
1 So (t ) 2
Si ( ) H ( )e jt d
激励信号的选择标准: 使扩展后的信号满足线性调频的要求
Wave candidate
f dr sin t 2 cos 0 t Si (t ) f dr 2 t
波形的产生
a) 平衡时
1, 0
s (t ) e j 2f it
( f fi )
f
b) 不平衡时
j ( 2f it ) j ( 2f it ) 1 j 2f it j 2f i t s (t ) e e e e 2 2 1 1 j 2f i t j (1 e )e (1 e j )e j 2f it 2 2
x(t ) A cos2ft (t )
f (t ) f1 f dr t t 0 nTr , nTr , n 0,1,2,3,
A t f f1 f2
B
D B 1
脉冲压缩比
t
LFM: 大时宽带宽信 号,解决了普通信号 中大占空比与距离分 辨率间的矛盾。发射 峰值功率小。其最大 优点在于抗多普勒平 移干扰。
N o N 'G2 ( F2 1)G2 N i S /N F i i S0 / N 0 Si N o S i G1G2 N i
T amp ( F 1 ) T in
1 F1G1G2 N i ( F2 1)G2 N i G1G2 Ni
F1G1G2 ( F2 1)G2 G1G2 F2 1 F1 G1
常用雷达发射机
根据平台划分 地面雷达发射机 发射功率高 窄带:高增益和高功率的速调管 宽带:行波管放大器 复合式发射机、全固态发射机 舰载雷达发射机 与地面雷达发射机相似
常用雷达发射机
机载雷达发射机 发射功率:
几千瓦 ~几十千瓦 (峰值) 几百瓦 ~几千瓦 (平均值)
通常采用行波管放大器 星载雷达发射机 通常采用体积小、重量轻的行波管放大器 固态微波晶体管放大器
优于
脉冲雷达发射机效率
通常峰值功率越高、占空比越小,效率越低
效率比较:
速调管、行波管发射机 磁控管、前向波放大管发射机 分布式全固态发射机
+ ++ +++
发射机的主要指标 4、信号形式
脉冲宽度: ps, ns ~ ms a) 固定载波的矩形脉冲调制信号
0.9A
0.1A
上升沿
下降沿
4、信号形式
b) 线性调频信号(LFM)
副主峰比(dB) -20lgN
- 6.0 -9.5 -12.0 -14.0 -16.9 -20.8 -22.3
其它的信号形式
LFM和PSK复合信号
FSK & PSK
OFDM & PSK
5、信号的稳定度
5、信号的稳定度
不对称性和随机性
针对离散型分量的频谱纯度(dB/Hz):该离散分量的单边带功率与
目的:使目标信号输出维持稳定
输出
中放
检波 LPF
视放 峰值检波器
2、IAGC(瞬时自动增益控制)
目的:防止信号太强,使干扰电压衰减,而维持目标信号的增益 放大器
输出
关键:迅速建立控制电压 为了不影响目标信号强度
i n i
控制 电路
检波器
i : n :
控制电路的时间常数 干扰持续时间
主振放大式
优点:频率稳定度高、可以形成复杂波形、相位相参、适于频率捷变 缺点: 结构复杂,效率低
高性能发射机的要求
发射信号必须是相参的 发射信号脉间必须是高稳定的 具备发射多种复杂波形的能力 抗干扰的能力 采用宽带发射机(>10%) 捷变频工作方式
发射机的主要指标 1、工作频率(频段)、带宽
镜像点-fi 的信号的模值
1 1 j Ai 1 e 1 2 cos 2 2 2
Ai ) I/Q正交鉴相器对系统动态或改善因子的限制: 20 lg( Ad
接收机的噪声分析
目的: 获得级联系统的噪声系数
Si / N i
Si / N i S0 / N 0
F, G, Bn
雷达接收机的主要性能指标(续)
b) 不平衡时
1 1 j 2f i t j s (t ) (1 e )e (1 e j )e j 2f i t 2 2
fi 点的信号的模值
1 1 j Ad 1 e 1 2 cos 2 2 2
雷达接收机的主要性能指标(续) 3、稳定性 短期稳定性(ms)和长期稳定性 频率源的稳定性和频谱纯度 幅度和相位的稳定性: 常温稳定性、宽温稳定性、振荡 常温稳定性、宽频带常温稳定性 4、动态范围和接收机的增益
Smin
S max
So G Si
雷达接收机的主要性能指标(续) 5、抗干扰能力
JATS(Jamming Analysis and Transmission Selection): 杂波分析和发射
利用压控振荡器(VCO)产生调频波,控制电压按所需的 调频规律变化 VCO: Voltage Controlled Oscillator 压控振荡器称为调频器,用以产生调频信号
波形的产生
无源法
So ( )
Si ( )
关键: 展宽滤波器的设计
波形的产生
无源法
So ( ) Si ( ) H ( )
So / N o
噪声系数
F
噪声系数的大小与信号功率无关
接收机的功率增益
G N0 GN i
So Si
理想情况
F
F 1
N 0 GN i
F 1
放大器不能放大信噪比!
信号和噪声放大了G倍, 但没有引入新的噪声
等效噪声模型
Si / N i
F, G, Bn
So / N o
理想放大器
Si / N i
发射机的主要指标 2、输出功率
峰值功率、平均功率、占空比
发射信号
Tr
Pt Pave Tr
D
Tr
占空比 or 雷达工作比
功率: 几毫瓦 ~ 几太瓦
发射机的主要指标 3、发射机的效率
定义: 发射机输出高频功率 发射机输入功率(供电,包括冷却用电)
连续波雷达发射机效率: 20~30%
射频隐身的关键
4、信号形式
相位编码 码字的随机性对信号进行扩频,降低了单位频带内的信号能 量,提高了距离和多普勒分辨。 二相码: 180 dg. 四相码: 90 dg.
(5位巴克码信号)
4、信号形式
相位编码
巴克码 码元长度
2 3 4 5 7 11 13
码元
+ -, + + +++ + - +, + + + +++-+ +++--++++---+--++++++--++-+-+
第二部分 雷达接收机
基本组成: 接收前端、中频接收机、频率源 雷达接收系统框图
天
线
雷达接收机(超外差式) 超外差的定义: 接收机利用一个或多个本振和混频器将 接收到的回波变换成中频
现 代 雷 达 接 收 机 框 图
AGC电路
AFC控制电路
AGC: Automatic gain control
AFC: Automatic frequency control
Tamp ( F 1)Tin
级联形式下的噪声系数
N i kT0 Bn
F1 , G1 , Bn
' S N ' F1 N i Si
F2 , G 2 , Bn
N'
No
Si / N i F1 ' S / N'
N ' F1G1 N i
No :
G2 ( N ' N amp )
Recalling
雷达频率源的实现方法 现代的频率源:宽频带、高稳定、能产生复杂波形 1、直接合成频率源 用稳定的晶振作为参考频率源 特点: 频率转换速度快(<10 us)、稳定可靠 输出相位噪声基底低 体积大、成本高 2、间接合成频率源 锁相频率合成器PLL (phase-locked loop ) 组成: 高稳晶振参考源、鉴相器 压控振荡器(VCO)、低通滤波器(LPF) 特点: 电路简单、原理复杂