STM32PWM控制舵机的main程序
stm32控制舵机程序
stm32控制舵机程序章节标题:基于STM32的舵机控制程序设计第一章:引言(约250字)1.1 研究背景控制舵机是机器人、无人机、航空模型等众多领域的关键技术之一。
而STM32系列的微控制器以其高性能、低功耗和丰富的外设资源被广泛应用于嵌入式控制系统。
本章主要介绍了舵机的作用及其在控制系统中的重要性,同时说明了选择STM32微控制器作为控制舵机的硬件平台的原因。
第二章:控制理论(约250字)2.1 舵机原理舵机是一种能够根据外部输入信号控制角度的电动执行器。
其通过接收PWM信号来确定输出位置和角度,通常在0至180度之间运动。
本章介绍了舵机的工作原理,包括PWM控制信号的作用、舵机内部的反馈控制电路等内容。
2.2 PID控制理论PID控制是一种常用的闭环控制方法,能够根据反馈信号调整输出信号,通过比较实际输出与期望输出的差异来实现控制。
本章详细介绍了PID控制的原理和算法,并提出了使用PID控制舵机的基本思路。
第三章:硬件设计(约250字)3.1 系统框架在舵机控制系统中,使用STM32微控制器作为控制芯片,通过引脚与舵机进行连接,实现对舵机的控制。
本章主要介绍了硬件设计的系统框架,包括STM32微控制器的选择、电源设计、信号输入输出设计等。
3.2 电路原理图本章详细描述了电路原理图设计,包括电源管理模块、驱动电路等详细设计内容。
同时对于舵机的接线方式和引脚定义进行了说明。
第四章:软件设计(约250字)4.1 程序流程本章介绍了在STM32上开发舵机控制程序的流程,包括初始化舵机控制模块、设置PWM输出引脚、编写控制算法等。
4.2 PID算法实现详细描述了如何在STM32上实现PID控制算法,包括参数调整、误差计算、控制输出计算等步骤。
同时,结合实际舵机控制需求,对PID控制算法进行优化。
4.3 实验验证通过实验验证了基于STM32的舵机控制程序的有效性和性能优势。
通过与传统控制方法进行对比,并分析实验数据,评估了该程序的稳定性和响应速度。
stm32 控制舵机
stm32 控制舵机章节一:引言(Introduction)在现代工业自动化系统中,舵机作为一种重要的执行器,被广泛应用于各个领域。
舵机能够提供精确的旋转运动,并可以通过调节控制信号的脉宽来改变输出角度。
在众多类型的舵机中,STM32控制舵机的方案成为了学术界和工程领域的热门研究课题。
本文将介绍STM32控制舵机的原理、实现方法以及应用实例。
章节二:STM32控制舵机的原理(Principle of STM32 Servo Control)2.1 舵机的工作原理舵机是一种具有闭环控制功能的电动执行器。
其工作原理是通过从控制器接收到的脉宽来指定输出角度,舵机根据脉宽的变化移动至相应位置,并通过内部的反馈系统达到准确的位置控制。
2.2 STM32的特性与控制原理STM32是一种强大的微控制器,具有高速、低功耗、丰富的外设接口等特点。
其通过PWM输出信号来控制舵机的转动。
PWM信号的占空比与舵机的角度成正比,通过调节占空比,可以实现对舵机角度的精确控制。
章节三:STM32控制舵机的实现方法(Implementation ofSTM32 Servo Control)3.1 硬件设计在STM32控制舵机的硬件设计中,需要配置定时器和IO口。
定时器用于产生PWM信号,IO口用于连接舵机控制线。
3.2 软件程序设计在STM32控制舵机的软件程序设计中,需要使用相关的库函数来配置定时器和IO口,并编写控制算法,实现对舵机的角度控制。
章节四:STM32控制舵机的应用实例(Application Example of STM32 Servo Control)4.1 智能小车方向控制在智能小车方向控制中,通过STM32控制舵机可以实现小车的转向功能,改变舵机的角度可以改变小车行驶的方向。
4.2 机械臂控制在机械臂控制中,通过STM32控制舵机可以实现机械臂的运动和抓取功能,通过控制不同舵机的角度,可以实现复杂的动作。
stm32舵机控制程序

stm32舵机控制程序章节一:引言引言部分首先介绍了舵机控制在工业和机器人领域的应用,以及其在实际生活中的普遍应用。
接着介绍了目前市场上使用最广泛的舵机控制器——STM32,以及对其进行控制的优势和挑战。
最后对本论文的研究目的和结构进行了概述。
章节二:背景知识与理论基础本章节主要介绍了舵机的基本原理和工作方式。
首先介绍了舵机的定义和分类,包括模拟舵机和数字舵机。
然后详细讲解了舵机的内部结构,包括电机、减速器、编码器等组成部分。
接着介绍了舵机控制的基本原理,包括PWM信号的生成和控制以及位置反馈的原理。
最后讲解了STM32的基本硬件结构和特点,为后续章节的程序设计做准备。
章节三:STM32舵机控制程序设计本章节详细介绍了STM32舵机控制程序的设计过程。
首先介绍了程序设计前的准备工作,包括硬件连接和配置,以及软件开发环境的搭建。
然后详细介绍了程序的主要模块,包括PWM输出模块、位置反馈模块和控制算法模块。
其中,PWM 输出模块负责生成合适的PWM信号以控制舵机的转向和角度;位置反馈模块负责读取舵机位置信息,以实现闭环控制;控制算法模块负责根据预设的目标角度和当前位置信息进行控制计算。
最后介绍了程序的测试和调试方法,并给出了一些实验结果。
章节四:实验结果和讨论本章节主要介绍了实验结果和对实验结果的讨论。
首先给出了实验中所使用的舵机的基本参数和实验条件。
然后给出了实验结果的定量数据和图表,并对实验结果进行了详细的分析和解读。
最后总结了本论文研究的主要成果和不足之处,并对未来可能的研究方向进行了展望。
总结:本论文通过对STM32舵机控制程序的设计和实验研究,初步实现了对舵机的准确控制。
实验结果表明,所设计的控制程序能够有效地控制舵机的转向和角度,并具有较好的控制精度和稳定性。
然而,由于实验条件的限制,本论文的研究结果还存在一定的局限性,需要进一步完善和扩展。
未来的研究可以考虑使用更高精度和更稳定的舵机进行控制,进一步提高控制精度和稳定性;同时还可以考虑将该控制程序应用于机器人等领域,以实现更丰富的运动控制功能。
STM32 输出PWM波程序
这是main.c 主程序//这是STM32F103ZE的一个模板//在PA8 PB13 产生一个互补的PWM波,频率为10KHz,占空比为1/5#include "stm32f10x.h"BitAction bbt=0; //定义一个位变量bbt,并清0u16 i;int main(void){u16 InitValue,Pre_Divide,ZKB;SystemInit(); //系统时钟初始化,调用该函数后,系统时钟为72M,函数原形在system_stm32f10x.c中GPIO_init();//****TIM1_PWM波1通道设置****************************************************************InitValue=7200; //初值1000Pre_Divide=1; //预分频1ZKB=1200; //占空比TIM1_PWM_1_init(InitValue,Pre_Divide,ZKB);//TIM1->CCR1=2400; //修改占空比//***************************************************************************** *********while(1){//}}这是sysinit.c 系统程序#include "stm32f10x.h"void GPIO_init(){GPIO_InitTypeDef GPIO_InitStructure; //声明端口结构,需要放在前面RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB,ENABLE);//开启相应端口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//***************端口A8,A9,A10是TIM1_PWM波的输出端***************************GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PWM波设为复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //端口频率可设为2,10,50 GPIO_Init(GPIOA, &GPIO_InitStructure); //启动A端口//***************************************************************************//**************端口B13,B14,B15是TIM1_PWM波的互补输出端**********************GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //端口频率可设为2,10,50 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //PWM波的复用推挽输出GPIO_Init(GPIOB,&GPIO_InitStructure); //启动B端口//***************************************************************************}//****TIM1_PWM波1通道初始化**********************************************************************void TIM1_PWM_1_init(u16 InitValue, u16 Pre_Divide, u16 CCR1_Val){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM_BDTRInitTypeDef TIM_BDTRInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);TIM_TimeBaseStructure.TIM_Period =InitValue;TIM_TimeBaseStructure.TIM_Prescaler =Pre_Divide-1;TIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Down;TIM_TimeBaseStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);TIM_ARRPreloadConfig(TIM1,ENABLE); //使能TIM1在ARR上的预装载寄存器TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;// 选择定时器模式TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //选择输出比较状态TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //选择互补输出比较状态TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //选择输出极性TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; //选择互补输出极性TIM_OCInitStructure.TIM_Pulse = CCR1_Val; //设置待装入捕获比较寄存器的脉冲值TIM_OC1Init(TIM1, &TIM_OCInitStructure);//捕获比较匹配器结构1通道赋值TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器//死区设置TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;//TIM1_OSSRState设置在运行模式下非工作状态选项TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;//TIM1_OSSIState设置在空闲模式下非工作状态选项(使能TIM1 OSSI状态)TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF; //TIM1_LOCKLevel设置了锁电平参数(不锁任何位)TIM_BDTRInitStructure.TIM_DeadTime = 0x90; //这里调整死区大小0-0xff,TIM1_DeadTIM1指定了输出打开和关闭状态之间的延时TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //TIM1_Break使能或者失能TIM1刹车输入(失能TIM1刹车输入)TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;//TIM1_BreakPolarity 设置TIM1刹车输入管脚极性(TIM1刹车输入管脚极性高)TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;//TIM1_AutomaticOutput使能或者失能自动输出功能(自动输出功能使能)TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);//(设置刹车特性,死区时间,锁电平,OSSI,OSSR状态和AOE(自动输出使能))TIM_Cmd(TIM1, ENABLE); //使能或者失能指定的TIM1TIM_CtrlPWMOutputs(TIM1, ENABLE); //使能或者失能TIM1外设的主输出}。
STM32PWM控制舵机的main程序

#include <stm32f10x.h> #include <stdio.h> #include <usart.h> #include <Nvic_Exit.h> #include <delay.h>#include <tft.h> #include <ov7670.h>#include<I2C.h> #include "stm32f10x_tim.h" #include "include.h"#include "Image.h" void RCC_Configuration(void); void GPIO_Configuration(void); void USART_Configuration(void); void NVIC_Configuration(void); void EXIT_configuration();void IO_Init(void);void Timer3_configuration();void Timer1_configuration();#define STRM 500 #define STRL 330 #define STRR 670 //#define STRE 1200 main(){RCC_Configuration();;// 系统时钟设置delay_init(72); // 延时初始化IO_Init();GPIO_Configuration();NVIC_Configuration();USART_Configuration();Timer3_configuration();Timer1_configuration();delay_ms(1000);TIM3->CCR2 = 504; // 电机初始化中间值GPIO_WriteBit( GPIOB,GPIO_Pin_0, 1);GPIO_WriteBit( GPIOB,GPIO_Pin_1, 1);// 灯亮delay_ms(1000); //等待4s,等待初始化完毕delay_ms(1000);delay_ms(1000);delay_ms(1000);TIM3->CCR2 = 560;// TIM3->CCR1 = 380; // 向右转delay_ms(1000);delay_ms(1000);// TIM3->CCR1 = 650;while(1){TIM3->CCR2 = 550;/*// TIM3->CCR1 = 380; // 向右转delay_ms(100);TIM3->CCR1= 504;delay_ms(100);// TIM3->CCR1 = 650;delay_ms(100);TIM3->CCR1= 504; TIM3->CCR1= 504; TIM3->CCR1= 504; TIM3->CCR1= 504;*/ void RCC_Configuration(void){SystemInit();// Enable GPIO clockRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC |RCC_APB2Periph_AFIO |RCC_APB2Periph_TIM1|RCC_APB2Periph_USART1,ENABLE);// Enable USART2 ClockRCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_TIM3,ENABLE);}void IO_Init(void){RCC->A PB2ENR|=1<<0;/开启辅助时钟RCC->A PB2ENR|=1<<2;/先使能外设 P ORTA 时钟 RCC->A PB2ENR|=1<<3;/先使能外设 P ORTB 时钟 RCC->A PB2ENR|=1<<4;/先使能外设 P ORTC 时钟GPIO C->CRL=0X88888888; //P ORTC 输入 GPIOC->CRH=0X33333333; GPIOC->ODR=0XFFFF;GP IOA->CRH=0X33333333; //P ORTA 上拉输出 GPIOA->CRL=0X33333333; GPIOA->ODR=0XFFFF;GPIOB->CRL=0X33333333; //PB0-7 上拉输出GPIOB->CRH=0X33333333; //PB8-15 上拉输出 GPIOA->ODR=0XFFFF;JTAG_Set(JTAG_SWD_DISABLE); //JTAG 功能禁止,复用 JTAG 端口}// 保持原有配置void GPIO_Configuration(void)// 摄像头 八位输入// 摄像头输出GPIO_InitTypeDef GPIO_InitStructure;CH1(PA8) CH4 (PA11) ****************************** GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11;// 复用推完输出//****** TIM3 CH1 ch2 (PA6 GPIO_InitStructure.GPIO_Pin pa7) ******************************= GPIO_Pin_6 | GPIO_Pin_7;= GPIO_Mode_AF_PP; // 复用推完输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_ModeGPIO_Init(GPIOA, &GPIO_InitStructure);//******* * 外部中断GPIO 初始化***************GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);/*设置USART1的Tx脚(PA.9)为第二功能推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA , &GPIO_InitStructure);/*设置USART1的Rx脚(P A.10)为浮空输入脚*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA , &GPIO_InitStructure);/**************************************************************************** ** */// 浮空输入//****** TIM1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);* 函数名* 函数描述* 输入参数*输出结果*返回值: USART_Configuration: 设置USART1: None: None :None保持原有配置*******************************************************************************void USART_Configuration(void){/* 定义USART初始化结构体USART_InitStructure */USART_InitTypeDef USART_InitStructure;/*波特率为9600bps8 位数据长度1 个停止位,无校验禁用硬件流控制禁止USART时钟时钟极性低在第 2 个边沿捕获数据最后一位数据的时钟脉冲不从SCLK 输出*/USART_ART_BaudRate = 9600;USART_ART_WordLength = USART_WordLength_8b; USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No ; USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1 , &USART_InitStructure);/* 使能USART1 */ USART_Cmd(USART1 ,ENABLE);}void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;// 中断默认参数// Configure the NVIC Preemption Priority BitsNVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//通道设置为串口 2 中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //中断占先等级 1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //中断响应优先级 1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);//********** 外部中断(PA0 PA4)***************************NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}void EXIT_configuration(){EXTI_InitTypeDef EXTI_InitStructure;EXTI_ClearITPendingBit(EXTI_Line0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); EXTI_InitStructure.EXTI_Line = EXTI_Line0;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure); EXTI_GenerateSWInterrupt(EXTI_Line0);//timer1 的通道 1 输出电机控制pwm pa8 void Timer1_configuration(){//TIM_DeInit(TIM1);TIM_TimeBaseInitTypeDef TIM1_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM1_TimeBaseStructure.TIM_Period = 7200-1;计数初值!@#$%A&*()~TIM1_TimeBaseStructure.TIM_Prescaler = 200;TIM1_TimeBaseStructure.TIM_ClockDivision = 0x0;TIM1_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//TIM1_TimeBaseStructure.TIM1_RepetitionCounter= 1000-1;// 0xFFFF;//0xF; 分频// 设置了周期计数器// 打开中断// 更新事件// 抢占优先级0// 响应优先级 1// 允许中断值;RCR向下计数器每次计数至0,会产生!@#$%A&*()~数器重新由RCR值(N)开始计数。
STM32f103 舵机控制程序

TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器2时钟
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap2_TIM2, ENABLE); //Timer3部分重映射 TIM2_CH2->PA1
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA
//初始化TIM2
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
基于STM32的舵机控制系统毕业设计论文

基于STM32的舵机控制系统摘要随着越来越多的高科技产品逐渐融入了日常生活中,舵机的控制系统发生了巨大的变化。
单片机、C语言等前沿学科的技术的日趋成熟与实用化,使得舵机的控制系统有了新的的研究方向与意义。
本文描述了一个由STM32微处理器、舵机、LCD 显示器、键盘等模块构成的,提供基于STM32的PWM信号舵机的控制系统。
该系统采用STM32微处理器为核心,在MDK的环境下进行编程,根据键盘的输入,使STM32产生周期性PWM信号,用此信号对舵机的速度及转角进行控制,并且通过LCD显示出数据。
结果表明该系统具有结构简单、工作可靠、精度高等特点.关键词:STM32微处理器;舵机系统;LCD显示;PWM信号AbstractAs well as the high-tech products gradually integrated into the daily life,servo control system has undergone tremendous changes.SCM and C language of the frontier disciplines such mature technology and practical,Make steering control system is a new research direction and meaning.This paper describes a STM32 microprocessors, steering, LCD display and keyboard, etc.Based on the STM32 servo control system of PWM signal,This system uses STM32 microprocessor as the core, MDK in the environment, according to the keyboard input programming, STM32 produce periodic PWM signal, with this signal to the velocity and Angle of steering gear control, and through the LCD display data. The features of the simple hardware, stable operation and high precision are incarnated in the proposed system.Keywords:STM32 microprocessors; Steering system; LCD display;pulse width modulation signal目录第1章绪论 (1)1.1 课题背景 (1)1.2 课题的研究展望 (2)课题任务及要求 (2)1.3 课题内容及安排 (3)第2章硬件设计 (4)2.1 STM32微处理单元 (4)2.2 舵机 (8)2.3 LCD显示器 (9)2.4 时钟电路的制作 (10)第3章软件设计 (12)3.1 STM32固件库简介 (12)3.2 软件的总体设计 (13)3.3 时钟初始化子程序 (14)3.4 I/O口初始化子程序 (17)3.5 PWM信号子程序 (17)3.6 A/D转换初始化子程序 (18)3.7 LCD显示子程序 (19)第4章系统调试 (21)4.1 调试方案 (21)4.1.1 硬件调试方案 (21)4.1.2 软件调试方案 (21)4.2 故障调试及解决方法 (22)4.3 联调结果 (22)结论 (26)社会经济效益分析 (27)参考文献 (28)致谢 (29)附录I 电路原理图 (30)附录Ⅱ程序清单 (35)第1章绪论舵机(servo motor),又名伺服电机,主要是由外壳、电路板、马达、减速齿轮和电位器构成。
2.STM32控制舵机方法
单片机控制舵机我们知道,舵机和步进电机,直流电机等都是感性负载,单片机的驱动电流较小,我们驱动直流电机,步进电机的时候都是用了驱动模块,也就是功率放大器件。
那驱动舵机时候是否需要呢?因为舵机内部集成了驱动电路,可以对我我们输入的PWM信号直接采样,所以,控制舵机的时候,用一个单片机的PWM引脚即可,这大大精简了电路设计。
1.舵机供电电压和电流要使舵机工作在额定功率下,电路方面需要满足舵机的要求,包括电流和电压,这个我们可以根据舵机的具体参数选择,比如某款舵机参数如下:*扭力:13kg/cm(at4.8V)15kg/cm(at6V)*速度:0.18sec/60度(at4.8V)0.15sec/60度(at6V)*工作电压:4.8V-6V根据以上信息,我们最好能够提供6V的电压,我们知道,设备的电流是由负载决定的。
比如舵机空载控制的时候一般电流是不大于400mA,但是带负载时候可能大于1A,然后我们设计机械臂的时候有5或者6个舵机,因为处于不同关节,所以实际使用中不会每个舵机都同时达到最大电流,那这里可以选择6V5A的电源。
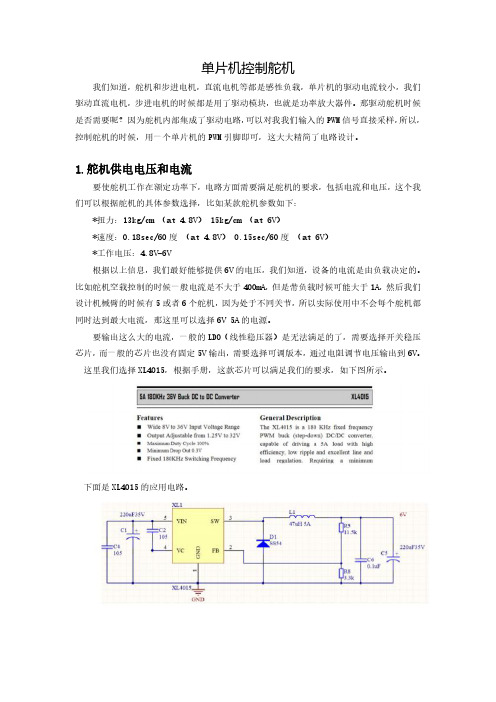
要输出这么大的电流,一般的LDO(线性稳压器)是无法满足的了,需要选择开关稳压芯片,而一般的芯片也没有固定5V输出,需要选择可调版本,通过电阻调节电压输出到6V。
这里我们选择XL4015,根据手册,这款芯片可以满足我们的要求,如下图所示。
下面是XL4015的应用电路。
2舵机的速度控制舵机的驱动是比较容易的,当我们使用了单片机控制的时候,通过输出50HZ(20ms 周期)的PWM,控制PWM的脉宽调节舵机的转角。
为了节约篇幅,较长的PWM初始化代码就不贴出来了,大家翻看程序即可。
前面章节有说明:舵机的转角和脉宽(高电平长度)存在一一对应关系,如果要控制舵机到某一角度,就改变输出的脉宽即可,比如从1ms到1.5ms,显然,很容易就实现了舵机位置控制,但是我们如何进行舵机速度控制呢?这里我们引入了PID算法,下面先看一下程序Velocity1=Position_PID1(Position1,Target1);Position1+=velocit1;TIM4->CCR1=Position1;其中我们使用Velocity1用于代表舵机的速度,这个值根据目标值和舵机的实际位置计算得到,然后通过累积的方法,赋值给相关寄存器作用到舵机。
STM32直流电机控制程序简明教程-

STM32直流电机控制程序简明教程-直流减速电机控制中,最常用的方法就是通过PWM来控制直流电机的转速。
在控制小车走直线的过程中,需要两者的转速一置(如果要走得很直,还需要在短时间内保证两者的行程大致相当,这可以用PID算法来控制,以后的文章中会专门叙述)。
因此,在检测到两者转速不一样时,需要动态调整其中一个或两个轮子的PWM的点空比(简单点的就以一个轮为基准,调整另外一个轮子即可;如果以一个固定的标准的话,需要调整两个轮子的PWM占空比)。
程序第一步:设置GPIO,略(输出PWM的管脚用Mode_AF_PP即可)程序第二步:设置定时器,(保证产生两路PWM即可,我用的是TIM4)voidTIM4_Configuration(void){TIM_TimeBaeInitTypeDefTIM_TimeBaeInitStructure;TIM_OCInitTyp eDefTIM_OCInitStructure;//时间基初始化TIM_TimeBaeInitStructure.TIM_Period=144;//18K/144=125Hz,这个是电机PWM的频率TIM_TimeBaeInitStructure.TIM_Precaler=4000;//72000000/4000=18KTIM_TimeBaeInitStructure.TIM_ClockDiviion=TIM_CKD_DIV1;TIM_TimeBaeInitStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaeInitStructure.TIM_RepetitionCounter=0某0000;TIM_TimeBaeInit(TIM4,&TIM_TimeBaeInitStructure);//输出比较模式设置,用于4路PWM输出TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM2;//输出PWMTIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;/ /使能正向通道TIM_OCInitStructure.TIM_OutputNState=TIM_OutputState_Diable;//失能反向通道TIM_OCInitStructure.TIM_Pule=PWM_L;//左轮DIR的占空比TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;//输出极性为低电平TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCPolarity_High;//互补输出极性为高电平TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Set;TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reet;TIM_OC1Init(TIM4,&TIM_OCInitStructure);//PWM_L初始化TIM_OC1PreloadConfig(TIM4,TIM_OCPreload_Diable);//改变点空比后,立即产生效应TIM_OCInitStructure.TIM_Pule=PWM_R;//左轮PWM的占空比TIM_OC2Init(TIM4,&TIM_OCInitStructure);//PWM_R初始化TIM_OC2PreloadConfig(TIM4,TIM_OCPreload_Diable);//改变点空比后,立即产生效应//使能定时器4TIM_Cmd(TIM4,ENABLE);TIM_CtrlPWMOutput(TIM4,ENABLE);}程序第三步:u16COUN1=0;u16COUN2=0;volatileu16Dit_L=0;//左轮行程脉冲数volatileu16Dit_R=0;//右轮行程脉冲数voidSyTick_Handler(void){COUN1=TIM1->CNT;//左轮在0.1秒里脉冲数COUN2=TIM2->CNT;//右轮在0.1秒里脉冲数Dit_L=Dit_L+COUN1;//左轮行程脉冲数Dit_R=Dit_R+COUN2;//右轮行程脉冲数if((COUN1-COUN2)>2){ eleif((COUN2-COUN1)>2){TIM_SetCounter(TIM1,0);TIM_SetCounter(TIM2,0);}2u16capture=0;e某ternvu16CCR1_Val;e某ternvu16CCR2_Val;e某ternvu16CCR3_Val;e某ternvu16CCR4_Val;voidTIM2_IRQHandler(void){/某TIM2_CH1togglingwithfrequency=183.1Hz某/if(TIM_GetITStatu(TIM2,TIM_IT_CC1)!=RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_CC1);capture=TIM_GetCaptur e1(TIM2);/某TIM2_CH2togglingwithfrequency=366.2Hz某/if(TIM_GetITStatu(TIM2,TIM_IT_CC2)!=RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_CC2);capture=TIM_GetCaptur e2(TIM2);/某TIM2_CH3togglingwithfrequency=732.4Hz某/if(TIM_GetITStatu(TIM2,TIM_IT_CC3)!=RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_CC3);capture=TIM_GetCaptur e3(TIM2);/某TIM2_CH4togglingwithfrequency=1464.8Hz某/if(TIM_GetITStatu(TIM2,TIM_IT_CC4)!=RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_CC4);capture=TIM_GetCaptur e4(TIM2);3}}4。
stm32舵机控制

stm32舵机控制章节一:引言---近年来,随着嵌入式系统技术的发展和应用的广泛推广,越来越多的设备和装置需要实现精确的运动控制功能。
舵机是一种常见的运动控制设备,能够精确控制电动机的转动角度,并在所需位置保持稳定。
本论文将详细介绍如何利用STM32芯片实现舵机的控制以及在实际应用中的意义。
章节二:STM32芯片概述---STM32系列是一种低功耗、高性能的单片机芯片,拥有丰富的外设资源和强大的计算能力,非常适合嵌入式系统的设计与开发。
STM32芯片通过内部的定时器和数字输出口来实现舵机的控制。
定时器可以实现精确的时间控制,数字输出口则可以通过PWM信号控制舵机的转动角度。
章节三:舵机控制的实现---1. 硬件连接:将舵机的信号线连接到STM32芯片的相应数字输出口。
2. 初始化定时器:在编程中,首先需要初始化定时器的工作模式和时钟频率,以确保定时器能够正常工作。
3. 配置PWM输出:将定时器的输出通道设置为PWM模式,并设置计数器的上下限值,以控制PWM信号的频率和占空比。
4. 控制舵机:通过修改定时器的比较值,可以改变PWM信号的占空比,从而控制舵机的转动角度。
在实际应用中,可以根据具体需求编写对应的控制算法,实现舵机的精确控制。
章节四:实际应用与展望---舵机控制技术在机器人、智能家居、无人机等领域具有广泛的应用前景。
利用STM32芯片实现舵机控制可以有效提高系统的稳定性和运动精度,实现更复杂的运动轨迹和动作控制。
未来,随着人工智能、物联网等技术的发展,舵机控制技术将会得到更广泛的应用,为我们的生活和工作带来更多便利和创新。
综上所述,舵机的控制对于实现精确的运动控制至关重要。
利用STM32芯片实现舵机的控制不仅能够提高系统的稳定性和运动精度,还具有广泛的应用前景。
通过进一步研究和开发,舵机控制技术将能够在更多领域发挥重要作用,为我们提供更多便利和创新。
章节三:舵机控制的实现---1. 硬件连接:将舵机的信号线连接到STM32芯片的相应数字输出口。
stm32控制舵机的程序
stm32控制舵机的程序第一章:引言在现代机械系统领域,舵机是一种常见的旋转执行器,经常用于控制机械装置的运动。
舵机通过接收控制信号来控制旋转角度,具有精准定位、快速响应和稳定性好的特点,因此在无人机、机器人、摄像头稳定器等领域广泛应用。
然而,要实现舵机的精确控制,需要使用专门的硬件电路和相应的控制算法。
本论文将介绍一种基于STM32单片机控制舵机的方法。
第二章:STM32舵机控制原理2.1 舵机的工作原理舵机是一种综合了伺服电机和反馈控制系统的特殊电机。
它由电机、位置反馈装置和控制电路组成。
当控制信号输入到控制电路中时,电机根据信号的宽度来确定要旋转的角度,位置反馈装置则用于检测电机的实际位置。
2.2 STM32控制舵机的原理STM32单片机是一类功能强大且易于使用的微控制器,具有高性能、低功耗和丰富的外设资源。
为了控制舵机,我们需要将STM32的IO口与舵机的控制信号线相连接,并在程序中通过设置IO口的高低电平来生成PWM(脉宽调制)信号,从而控制舵机的角度。
第三章:STM32舵机控制程序设计在本章中,我们将介绍具体的STM32舵机控制程序设计步骤。
3.1 硬件连接首先,需要将舵机的控制信号线连接至STM32单片机的某个IO口。
具体连接方式可以参考相关的舵机控制电路图。
3.2 建立工程使用Keil等开发工具,根据STM32型号建立一个新工程,并配置好相应的时钟和引脚设置。
3.3 编写程序在主函数中,需要先初始化IO口,并配置为输出模式。
然后编写一个循环,不断改变IO口的电平状态,以产生PWM信号。
根据舵机的角度范围(一般为0到180度),通过改变IO口电平的时间间隔和占空比,可以控制舵机旋转到相应的角度。
3.4 烧录程序最后,将生成的可执行程序烧录到STM32单片机中,然后连接电源即可运行舵机控制程序。
第四章:实验结果与分析为了验证上述STM32舵机控制程序的有效性,我们进行了一系列实验。
实验结果表明,通过控制不同的PWM信号,可以实现对舵机的精确控制,使其旋转到相应的角度。
单片机PWM舵机控制原理
单片机PWM舵机控制原理舵机的控制一般需要一个20ms 的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。
以180 度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0 度;1.0ms------------45 度;1.5ms------- -----90 度;2.0ms-----------135 度;2.5ms-----------180 度;如下图可形象地表示脉冲与角度关系#includeunsigned char count; //0.5ms 次数标识sbit pwm=P1; //信号输出sbit jia=P1;//角度增加按键sbit jan=P1 ; //角度减小按键char jd; //角度标识void delay(unsigned int i){unsigned int j,k;for(j=i;j>0;j--)for(k=125;k>0;k--);}void Time0_init() //定时器初始化{TMOD=0x01;IE=0x82;TH0=0xff;TL0=0x19; //12 晶振,0.25msTR0=1; //定时器开始}void Time0_int() interrupt 1 //中断程序{TH0=0xff;TL0=0x19;if(count pwm=1;elsepwm=0; //其余输出低电平count++;count=count%40; //时钟保持40 个count 即20ms }void keyscan() //按键扫描{if(jia==0) //角度增加键是否按下{delay(50); //按下延时,消抖if(jia==0){jd++; //角度标识加1count=0; //按键按下,则20ms 周期重新开始if(jd==50)jd=9; //已经是180°则保持while(jia==0); //等待按键放开}}if(jan==0) //角度减小键是否按下{delay(10);if(jd==0);{jd--; //角度标识减1count=0;if(jd==0)jd=1;while(jan==0);}}}void main(){jd=1;count=0;Time0_init();while(1){keyscan();// display();}}tips:感谢大家的阅读,本文由我司收集整编。
STM32f103PWM(用于电调)程序

GPIOA->CRL&=0XFFFFF0FF;//PA2清除之前的设置
GPIOA->CRL|=0X00000B00;//复用功能输出
GPIOA->CRL&=0XFFFF0FFF;//PA3清除之前的设置
GPIOA->CRL|=0X0000B000;//复用功能输出
#include "timer.h"
#include "led.h"
//定时器3中断服务程序
void TIM3_IRQHandler(void)
{
if(TIM3->SR&0X0001)//溢出中断
{
//LED1=!LED1;
}
TIM3->SR&=~(1<<0);//清除中断标志位
}
//通用定时器中断初始化
}
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
/********************************************************************************
本程序中共预设了八个通道的PWM输出,使用高级定时器1和通用定时器2
//后两位00表示输入状态;此时前两位00模拟输入;01浮空输入;10上拉/下拉输入;11保留
//后两位01/10/11分别表示10/20/50MHz的输出速度;此时前两位00通用推完输出;01通用开漏输出;10复用推挽;11复用开漏
GPIOA->CRL&=0XFFFFFF0F;//PA1清除之前的设置
舵机控制程序

舵机控制程序#include<reg52.h>#define uchar unsigned char #define uint unsigned intuint N,M; //N,M 为中断函数中的计数数uint X=15;sbit PWM=P1^2; //PWM输出脚sbit P36=P3^6; //按键1控制舵机转动sbit P37=P3^7; //按键2控制舵机转动,方向自己试试 bit ok;void delay(uchar a) //按键消抖延时函数{uchar x,y;for(x=100;x>0;x--)for(y=a;y>0;y--);}void duoji(void)interrupt 1 {TH0=(65536-100)/256; //0.1ms,时间可以自己调,TL0=(65536-100)%256;N++;M++;if (M>=200) // 0.1ms*200=20ms,前面时间调节后200要变懂,乘积为20ms 就行啦{PWM=1;ok=1;N=0;M=0;}/*这两个if语句(除了数值),不要随便改动,容易出错ok为标志位,只有上面if语句成立的情况下,下面语句才能执行,这样就保证不出错*/if (ok && (N>=X)){N=0;ok=0;PWM=0;}}void init(){TMOD=0x01;TH0=(65536-100)/256;TL0=(65536-100)%256;EA=1;ET0=1;TR0=1;PWM=0;}void keyscan(void) {if(P36==0) //调整脉冲宽度的设置变宽{delay(10);if(P36==0){while(!P36);X+=1;if(X<6){X=6;}}}if(P37==0) //调整脉冲宽度的设置变窄{delay(10);if(P37==0){while(!P37);X-=1;if(X>24){X=24;}}}}main() {init(); while(1) {keyscan(); }}说明。
1-实验一 PWM控制电机舵机

实验一 PWM控制电机舵机1.实验目的●掌握使用Flash Loader下载程序到单片机的方法。
●掌握STM32配置PWM的方法。
●掌握PWM控制电机舵机的工作原理2.实验内容了解定时器的基本概念和使用方法。
通过阅读STM32数据手册,熟悉STM32定时器的相关寄存器功能和配置。
编程实现定时器输出PWM波形功能。
学会适应Flash Loader来下载编译好的二进制可执行文件。
3. 预备知识●使用MDK4.14集成开发环境,编译和调试程序的基本过程。
● STM32应用程序的框架结构。
●定时器产生PWM的基本概念。
4. 实验设备及工具●硬件:博创智能车套件,PC机,USB转TTL串口线●软件:MDK4.14集成开发环境,USB转串口线驱动5. 实验原理及说明5.1 TIMER输出PWM基本概念脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
简单一点,就是对脉冲宽度的控制。
一般用来控制步进电机的速度等等。
STM32的定时器除了TIM6和TIM7之外,其他的定时器都可以用来产生PWM输出,其中高级定时器TIM1和TIM8可以同时产生7路的PWM输出,而通用定时器也能同时产生4路的PWM输出。
5.1.1 PWM输出模式STM32的PWM输出有两种模式,模式1和模式2,由TIMx_CCMRx寄存器中的OCxM 位确定的(“110”为模式1,“111”为模式2)。
模式1和模式2的区别如下:110:PWM模式1-在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
111:PWM模式2-在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
32路舵机控制器程序
32路舵机控制器程序第一章:绪论随着人工智能和机器人技术的快速发展,舵机控制器在机器人和自动化控制领域中起着至关重要的作用。
舵机是一种能够精确控制角度和位置的电机,广泛应用于机器人的运动控制和各种自动化设备中。
本章主要介绍论文的研究背景和意义、研究目的和内容、研究方法和技术路线以及论文的结构安排。
第二章:舵机控制器的原理与设计本章主要介绍舵机控制器的原理和设计要点。
首先,对舵机的基本原理进行介绍,包括舵机的结构组成、运动原理以及控制原理。
然后,对32路舵机控制器的设计目标和要求进行阐述,包括控制精度、稳定性、响应速度等方面的要求。
接下来,介绍舵机控制器的硬件设计,包括电源电路、控制电路、通信接口等。
最后,介绍舵机控制器的软件设计,包括驱动程序的编写、舵机控制算法的设计等方面内容。
第三章:32路舵机控制器的实验与仿真本章主要介绍对32路舵机控制器进行的实验和仿真结果。
首先,介绍实验的目的和设计,包括舵机控制器的性能测试和功能验证。
然后,介绍实验过程和实验数据的采集方式。
接着,展示实验结果和数据分析,包括舵机控制器的性能指标,如控制精度、稳定性、响应速度等方面的评价。
最后,对实验和仿真结果进行讨论和分析,并提出改进措施和优化方案。
第四章:总结与展望本章主要对论文进行总结与展望。
首先,对本论文的研究内容、结果和创新点进行总结。
然后,对该舵机控制器的优点和不足进行讨论,提出改进和优化的建议。
接着,对舵机控制器领域的发展趋势进行展望,并提出未来的研究方向和重点。
最后,对本论文的贡献进行总结,并对读者提出一些建议和启示。
通过以上四个章节的论文撰写,可以全面系统地介绍32路舵机控制器的原理、设计、实验和性能评估,并对未来发展进行展望,为舵机控制器的研究和应用提供一定的参考和指导。
第一章:绪论随着人工智能和机器人技术的快速发展,舵机控制器在机器人和自动化控制领域中起着至关重要的作用。
舵机是一种能够精确控制角度和位置的电机,广泛应用于机器人的运动控制和各种自动化设备中。
stm32控制舵机
stm32控制舵机章节一:引言(200字)随着科技的不断进步,舵机在机器人技术、无人机和模型控制等领域中扮演着重要的角色。
舵机作为一种能够精确控制角度位置的电机,被广泛应用于各种机械系统中。
然而,如何有效地控制舵机的角度位置一直是一个挑战。
本论文将介绍如何使用STM32微控制器来控制舵机,并详细讨论了实现舵机控制的方法和步骤。
章节二:STM32舵机控制的原理与方法(300字)舵机控制系统主要由两部分组成:信号生成部分和舵机控制部分。
信号生成部分通过发送脉冲宽度调制(PWM)信号来控制舵机,而舵机控制部分通过接收并解码PWM信号来控制舵机的角度位置。
在STM32控制舵机之前,需要先了解PWM信号的工作原理,即通过调整脉冲宽度来控制电机的角度位置。
然后,使用STM32的定时器模块来生成PWM信号,通过配置定时器的计数值和比较值,可以实现不同占空比的PWM信号。
接下来,将生成的PWM信号通过IO口连接到舵机控制部分,舵机控制部分通过解码PWM信号来控制舵机的角度位置。
章节三:STM32舵机控制系统的设计与实现(300字)在实际应用中,舵机控制系统需要考虑实时性、精确性和可靠性。
为了实现这些要求,需要进行系统设计和软件编程的工作。
首先,设计一个合适的系统架构,包括STM32微控制器、舵机控制电路和外部输入设备等。
然后,进行软件编程,包括配置STM32的定时器模块、设置PWM信号的频率和占空比、配置IO口和编写解码PWM信号的代码等。
最后,进行系统调试和性能测试,通过验证系统是否能够实现精确的角度位置控制,以及满足实时性和可靠性的要求。
章节四:实验结果与讨论(200字)在本章节中,将介绍实验结果和对实验结果的讨论。
为了验证STM32控制舵机的效果,进行了一系列实验,包括不同角度位置的控制、响应速度的测试以及系统的实时性和可靠性。
实验结果表明,使用STM32微控制器可以有效控制舵机的角度位置,并且具有很高的精确性和实时性。
STM32USART控制PWM波输出(2)

Main,c#include "stm32f10x.h"#include "string.h"/***********************************************************************外设时钟使能************************************************************************/void RCC_Configuration(void){/* 使能外设时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC |RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);}/****************************************************************************** *全部用到的引脚将在在配置******************************************************************************* /void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/* Configure Pb.8-11 as output push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOC, &GPIO_InitStructure);/* 配置串口1引脚*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);}/****************************************************************************** *全部中断在此配置******************************************************************************* /void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;/* Configure the NVIC Preemption Priority Bits */NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);/* Enable the USART1 Interrupt */NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority =0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器}void EXTI_Configuration(void){EXTI_InitTypeDef EXTI_InitStructure;GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource1);GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource2);GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource3);GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource4);EXTI_ClearITPendingBit(EXTI_Line0);EXTI_ClearITPendingBit(EXTI_Line1);EXTI_ClearITPendingBit(EXTI_Line2);EXTI_ClearITPendingBit(EXTI_Line3);EXTI_ClearITPendingBit(EXTI_Line4);EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1 | EXTI_Line2 | EXTI_Line3 | EXTI_Line4;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);}///***************************************************************************** **//// 外部中断在此配置////***************************************************************************** **///void EXTI_Configuration(void)//{// EXTI_InitTypeDef EXTI_InitStructure;// GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource8); // S4中断// GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource9);// GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource10);// GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource11);// EXTI_ClearITPendingBit(EXTI_Line8);// EXTI_ClearITPendingBit(EXTI_Line9);// EXTI_ClearITPendingBit(EXTI_Line10);// EXTI_ClearITPendingBit(EXTI_Line11);// EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;// EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;// EXTI_InitStructure.EXTI_Line=EXTI_Line8|EXTI_Line9|EXTI_Line10|EXTI_Line11;// EXTI_InitStructure.EXTI_LineCmd = ENABLE;// EXTI_Init(&EXTI_InitStructure);//}///****************************************************************************** *初始化时钟晶振72MHZ******************************************************************************* /void SysClock_Init(void){ErrorStatus HSEStartUpStatus;RCC_DeInit();RCC_HSEConfig(RCC_HSE_ON);HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);FLASH_SetLatency(FLASH_Latency_2);RCC_HCLKConfig(RCC_SYSCLK_Div1);RCC_PCLK2Config(RCC_HCLK_Div1);RCC_PCLK1Config(RCC_HCLK_Div2);RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);RCC_PLLCmd(ENABLE);while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){;}RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);while(RCC_GetSYSCLKSource() != 0x08){;}}}/*****************************************************************USART1 初始化baud 波特率*****************************************************************/void USART1_Init(unsigned int baud){USART_InitTypeDef USART_InitStructure;USART_ART_BaudRate = baud; //信息传输速率USART_ART_WordLength = USART_WordLength_8b; //在一个帧中传输或者接收到的数据位数USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_Cmd(USART1, ENABLE);}/*****************************************************************从USART1 发送一个字节*****************************************************************/void USART1_SendByte(unsigned char temp){USART_SendData(USART1, temp);while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);}/***************************************************************** 从USART1 发送字符串*****************************************************************/ void USART1_Printf(char *pch){while(*pch != '\0'){USART1_SendByte(*(unsigned char *)pch);pch++;}}/******************************************** 延时程序ms*****************************************/void Delay(unsigned short time){unsigned short i, j;for(; time > 0; time--){for(j = 0; j < 10; j++){for(i = 0; i < 1000; i++);}}}/*******************************************************MAIN 函数*******************************************************/int main(void){SysClock_Init(); // 初始化系统时钟72MHZRCC_Configuration(); // 使能外设GPIO_Configuration(); // 配置引脚NVIC_Configuration(); // 配置中断USART1_Init(9600); // 配置串口1,波特率9600EXTI_Configuration();USART1_Printf("");while(1){;}// return(0);}STM32f10x_it.c/******************************************************************************** * @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c* @author MCD Application Team* @version V3.4.0* @date 10/15/2010* @brief Main Interrupt Service Routines.* This file provides template for all exceptions handler and* peripherals interrupt service routine.****************************************************************************** * @copy** THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONL Y AIMS AT PROVIDING CUSTOMERS* WITH CODING INFORMA TION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SA VE* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.** <h2><center>© COPYRIGHT 2010 STMicroelectronics</center></h2>*//* Includes ------------------------------------------------------------------*/#include "stm32f10x_it.h"/** @addtogroup STM32F10x_StdPeriph_Template* @{*//* Private typedef -----------------------------------------------------------*//* Private define ------------------------------------------------------------*//* Private macro -------------------------------------------------------------*//* Private variables ---------------------------------------------------------*//* Private function prototypes -----------------------------------------------*//* Private functions ---------------------------------------------------------*//****************************************************************************** //* Cortex-M3 Processor Exceptions Handlers *//****************************************************************************** //*** @brief This function handles NMI exception.* @param None* @retval None*/void NMI_Handler(void){}/*** @brief This function handles Hard Fault exception.* @param None* @retval None*/void HardFault_Handler(void){/* Go to infinite loop when Hard Fault exception occurs */while (1){}}/*** @brief This function handles Memory Manage exception.* @param None* @retval None*/void MemManage_Handler(void){/* Go to infinite loop when Memory Manage exception occurs */ while (1){}}/*** @brief This function handles Bus Fault exception.* @param None* @retval None*/void BusFault_Handler(void){/* Go to infinite loop when Bus Fault exception occurs */while (1){}}/*** @brief This function handles Usage Fault exception.* @param None* @retval None*/void UsageFault_Handler(void){/* Go to infinite loop when Usage Fault exception occurs */ while (1){}}/*** @brief This function handles SVCall exception.* @param None* @retval None*/void SVC_Handler(void){}/*** @brief This function handles Debug Monitor exception.* @param None* @retval None*/void DebugMon_Handler(void){}/*** @brief This function handles PendSVC exception.* @param None* @retval None*/void PendSV_Handler(void){}extern USART1_Printf(char *pch);// extern EXTI0_IRQHandler(void);// extern EXTI1_IRQHandler(void);// extern EXTI2_IRQHandler(void);//extern EXTI3_IRQHandler(void);// extern EXTI4_IRQHandler(void);/*** @brief This function handles SysTick Handler.* @param None* @retval None*/void SysTick_Handler(void){}extern Delay(unsigned short time);/****************************************************************************** ** Function Name : USART1_IRQHandler* Description : This function handles USART1 global interrupt request.* Input : None* Output : None* Return : None******************************************************************************* /extern void USART1_SendByte(unsigned char temp); // 声明外部函数void USART1_IRQHandler(void){if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET){ // 如果是串口接收中断USART1_SendByte(USART_ReceiveData(USART1)); // 将接收到的字节发送出去}}void EXTI0_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line0) != RESET){Delay(200);EXTI_ClearITPendingBit(EXTI_Line0);USART1_Printf("ff\n");}}void EXTI1_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line1) != RESET){Delay(200);EXTI_ClearITPendingBit(EXTI_Line1);USART1_Printf("ff\n");}}void EXTI2_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line2) != RESET){Delay(200);EXTI_ClearITPendingBit(EXTI_Line2);USART1_Printf("ff\n");}}void EXTI3_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line3) != RESET){Delay(200);EXTI_ClearITPendingBit(EXTI_Line3);USART1_Printf("ff\n");}}void EXTI4_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line4) != RESET) {Delay(100);EXTI_ClearITPendingBit(EXTI_Line4);USART1_Printf("ff\n");}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include <stm32f10x.h>#include <stdio.h>#include <usart.h>#include <Nvic_Exit.h>#include <delay.h>#include <tft.h>#include <ov7670.h>#include<I2C.h>#include "stm32f10x_tim.h"#include "include.h"#include "Image.h"void RCC_Configuration(void);void GPIO_Configuration(void);void USART_Configuration(void);void NVIC_Configuration(void);void EXIT_configuration();void IO_Init(void);void Timer3_configuration();void Timer1_configuration();#define STRM 500#define STRL 330#define STRR 670//#define STRE 1200main(){RCC_Configuration();;//系统时钟设置delay_init(72);//延时初始化IO_Init();GPIO_Configuration();NVIC_Configuration();USART_Configuration();Timer3_configuration();Timer1_configuration();delay_ms(1000);TIM3->CCR2 = 504;// 电机初始化中间值GPIO_WriteBit( GPIOB,GPIO_Pin_0, 1);//灯亮GPIO_WriteBit( GPIOB,GPIO_Pin_1, 1);delay_ms(1000); //等待4s,等待初始化完毕delay_ms(1000);delay_ms(1000);delay_ms(1000);TIM3->CCR2 = 560;// TIM3->CCR1 = 380; //向右转delay_ms(1000);delay_ms(1000);// TIM3->CCR1 = 650;while(1){TIM3->CCR2 = 550;/*// TIM3->CCR1 = 380; //向右转delay_ms(100);TIM3->CCR1= 504;delay_ms(100);// TIM3->CCR1 = 650;delay_ms(100);TIM3->CCR1= 504; TIM3->CCR1= 504; TIM3->CCR1= 504; TIM3->CCR1= 504; */}}void RCC_Configuration(void){SystemInit();// Enable GPIO clockRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO|RCC_APB2Periph_TIM1|RCC_APB2Periph_USART1,ENABLE);// Enable USART2 ClockRCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_TIM3,ENABLE);}void IO_Init(void){RCC->APB2ENR|=1<<0;//开启辅助时钟RCC->APB2ENR|=1<<2;//先使能外设PORTA时钟RCC->APB2ENR|=1<<3;//先使能外设PORTB时钟RCC->APB2ENR|=1<<4;//先使能外设PORTC时钟GPIOC->CRL=0X88888888; //PORTC 输入//摄像头八位输入GPIOC->CRH=0X33333333;GPIOC->ODR=0XFFFF;GPIOA->CRH=0X33333333; //PORTA上拉输出//摄像头输出GPIOA->CRL=0X33333333;GPIOA->ODR=0XFFFF;GPIOB->CRL=0X33333333; //PB0-7 上拉输出GPIOB->CRH=0X33333333; //PB8-15 上拉输出GPIOA->ODR=0XFFFF;JTAG_Set(JTAG_SWD_DISABLE);//JTAG功能禁止,复用JTAG端口}//保持原有配置void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;//****** TIM1 CH1(PA8) CH4 (PA11) ******************************GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推完输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//****** TIM3 CH1 ch2 (PA6 pa7) ******************************GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推完输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//******** 外部中断GPIO 初始化***************GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_4;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);/* 设置USART1的Tx脚(PA.9)为第二功能推挽输出模式*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA , &GPIO_InitStructure);/* 设置USART1的Rx脚(PA.10)为浮空输入脚*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA , &GPIO_InitStructure);}/****************************************************************************** ** 函数名: USART_Configuration保持原有配置* 函数描述: 设置USART1* 输入参数: None* 输出结果: None* 返回值: None******************************************************************************* /void USART_Configuration(void){/* 定义USART初始化结构体USART_InitStructure */USART_InitTypeDef USART_InitStructure;/**波特率为9600bps*8位数据长度*1个停止位,无校验*禁用硬件流控制*禁止USART时钟*时钟极性低*在第2个边沿捕获数据*最后一位数据的时钟脉冲不从SCLK 输出*/USART_ART_BaudRate = 9600;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No ;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1 , &USART_InitStructure);/* 使能USART1 */USART_Cmd(USART1 , ENABLE);}void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;//中断默认参数// Configure the NVIC Preemption Priority BitsNVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//通道设置为串口2中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //中断占先等级1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //中断响应优先级1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //打开中断NVIC_Init(&NVIC_InitStructure);//********** 外部中断(PA0 PA4)****************************************NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //更新事件NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //允许中断NVIC_Init(&NVIC_InitStructure);}void EXIT_configuration(){EXTI_InitTypeDef EXTI_InitStructure;EXTI_ClearITPendingBit(EXTI_Line0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);EXTI_InitStructure.EXTI_Line = EXTI_Line0;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);EXTI_GenerateSWInterrupt(EXTI_Line0);}//timer1 的通道1 输出电机控制pwm pa8void Timer1_configuration(){//TIM_DeInit(TIM1);TIM_TimeBaseInitTypeDef TIM1_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM1_TimeBaseStructure.TIM_Period = 7200-1; // 0xFFFF; 计数初值!@#$%^&*()~TIM1_TimeBaseStructure.TIM_Prescaler = 200; //0xF; 分频TIM1_TimeBaseStructure.TIM_ClockDivision = 0x0;TIM1_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//TIM1_TimeBaseStructure.TIM1_RepetitionCounter= 1000-1; //设置了周期计数器值;RCR向下计数器每次计数至0,会产生!@#$%^&*()~//一个更新事件且计数器重新由RCR值(N)开始计数。