程序编写和调试环境简介
python idle的使用和简单程序设计

python idle的使用和简单程序设计Python Idle是一个功能强大的Python编程集成开发环境(IDE)。
它可以帮助初学者轻松地编写、运行和调试Python代码。
在本文中,我们将介绍Python Idle 的基本功能,以及如何使用它进行简单的程序设计。
一、安装Python Idle要开始使用Python Idle,首先需要安装它。
你可以从Python官方网站下载并安装最新版本的Python。
在安装过程中,确保选中“Idle”和“Python for data science and machine learning”选项。
安装完成后,你可以从开始菜单找到并运行Python Idle。
二、启动Python Idle启动Python Idle后,你将看到一个类似于文本编辑器的界面。
在顶部,你会看到四个主要的菜单:文件(File)、编辑(Edit)、运行(Run)和调试(Debug)。
1. 文件(File)菜单:用于创建、打开和保存文件,以及退出Python Idle。
2. 编辑(Edit)菜单:用于复制、剪切、粘贴和撤销/重做操作。
3. 运行(Run)菜单:用于运行当前打开的文件中的Python代码。
4. 调试(Debug)菜单:用于设置断点、单步执行代码和查看变量值等调试功能。
三、编写简单程序现在,让我们创建一个简单的Python程序来练习编程。
在Python Idle中,你可以通过以下步骤编写和运行程序:1. 在编辑器中输入以下代码:```pythonprint("Hello, World!")```2. 按下F5键或选择运行(Run)>运行当前文件(Run Current File)。
你将在底部的工作区看到输出的“Hello, World!”。
四、调试程序Python Idle还提供了调试功能,可以帮助你更好地理解代码的执行过程。
以下是如何使用调试功能的步骤:1. 在代码中选择一个位置,点击调试(Debug)>开始调试(Start Debugging)。
信息学奥赛中Linux环境程序编写、调试及测评简易教程.pdf
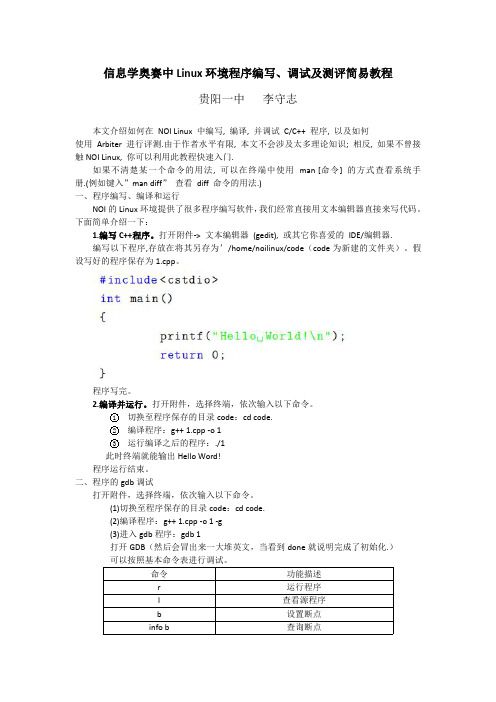
信息学奥赛中Linux环境程序编写、调试及测评简易教程贵阳一中李守志本文介绍如何在NOI Linux中编写,编译,并调试C/C++程序,以及如何使用Arbiter进行评测.由于作者水平有限,本文不会涉及太多理论知识;相反,如果不曾接触NOI Linux,你可以利用此教程快速入门.如果不清楚某一个命令的用法,可以在终端中使用man[命令]的方式查看系统手册.(例如键入”man diff”查看diff命令的用法.)一、程序编写、编译和运行NOI的Linux环境提供了很多程序编写软件,我们经常直接用文本编辑器直接来写代码。
下面简单介绍一下:1.编写C++程序。
打开附件->文本编辑器(gedit),或其它你喜爱的IDE/编辑器.编写以下程序,存放在将其另存为’/home/noilinux/code(code为新建的文件夹)。
假设写好的程序保存为1.cpp。
程序写完。
2.编译并运行。
打开附件,选择终端,依次输入以下命令。
1切换至程序保存的目录code:cd code.2编译程序:g++1.cpp-o13运行编译之后的程序:./1此时终端就能输出Hello Word!程序运行结束。
二、程序的gdb调试打开附件,选择终端,依次输入以下命令。
(1)切换至程序保存的目录code:cd code.(2)编译程序:g++1.cpp-o1-g(3)进入gdb程序:gdb1打开GDB(然后会冒出来一大堆英文,当看到done就说明完成了初始化.)可以按照基本命令表进行调试。
命令功能描述r运行程序l查看源程序b设置断点info b查询断点watch a观察变量a的值(变量可以换成表达式)clear4删除断点4delet删除所有断点n单步调试c继续运行程序p a输出变量a的值bt查看当前函数调用栈的所有信息f打印当前栈的信息set var b修改变量b的值jump n跳转到第n行代码q退出这里调试东西太多,不能细讲,大家可以网上搜索一下相关资料,边看边联系,很快就熟悉了。
VisualStudio开发环境介绍

• 项目文件含有对应项目所包含的文件的一个列表以及它们的跟踪 信息
• 项目通常包含多个项
2.5 集成环境演示
• 创建解决方案 • 添加控件和编写代码 • 编译和运行程序 • 代码分析
2.5.1 创建解决方案
• 选择【文件】|【新建】|【空白解决方案】命令,打 开【新建项目】对话框
• 变量 • 常量
– const 类型标识符 变量名=表达式;
3.3 简单数据类型
• 数值类型
– 整型
• 有符号 sbyte short
• 无符号 byte
ushort
– 浮点型 float double
– 小数型 decimal
• 字符类型
– 字符型 char
– 字符串型 string
• 布尔类型
VisualStudio开发环境 介绍
概述
• .NET Framework框架 • Visual Studio .Net集成开发环境(IDE) • 程序设计语言 C# • .NET 相关知识 • 学会开发:
– Windows窗体应用程序 – Web应用程序
1.1 Visual Studio .Net 架构
– 语句块 { … } – 空语句 “;” – 表达式语句 x=a+b; – 条件选择语句 – 循环语句 – 跳转语句 – 异常处理语句 – using语句 (类似于include和import)
3.5 C#常用语句
• using用法 • (1)引用命名空间 using Namespace;
(2)创建命名空间别名 using alias = namespace | type; (3)强制资源清理 • 清理非托管资源,不受GC控制的资源。Using结束后会隐式的调用 Disposable方法。 using (Class1 c = new Class1()) { }//清理非托管不受GC控制的资源 但是当对象使用using关键字的时候,必须实现IDisposable接口。其实 using的使用和try-catch-finaly中,在finaly代码域调用Disposable方 法效果一样。注意Using不能使用多个不同的类
C语言程序编写和调试环境简介

3.6 头文件和链接器命令文件示例 1、头文件 定义LF240X DSP内部寄存器的地址分配
2、链接器命令文件 链接器对命令文件名的大小写是敏感的,空格和空 行是没有 意义的,但可以用做定界符.MEMORY和 SECTIONS是链接命令. MEMORY:标示实际存在的目标系统中可被使用 的存储器范围,每个存储器范围都有名字、起始地 址和长度。其中PAGE0规定程序存储器,PAGE1规定 数据存储器。
可见访问DSP数据空间地址不需要对要访问的单元预先定 义,利用指针直接访问就可以了.
3.4 系统初始化
C程序开始运行时,必须首先初始化C运行环境,这是 通过c_int0函数完成的,这个函数在运行支持库 (rts,runtime-support library)中。连接器会将这个函 数的入口地址放置在复位中断向量处,使其可以在初始化 时被调用。 c_int0函数进行以下工作以建立C运行环境: •为系统堆栈产生.stack块,并初始化堆栈指针。 •从.cinit块将初始化数据拷贝到.bss块中相应的变量。 •调用main函数,开始运行C程序。 用户可以对c_int0函数进行修改,修改后的函数必须 完成以上任务。
第三章 C语言程序编写和 调试环境简介
DSP软件开发平台主要包括DSP代码生成过程中所必需的C编 译器,汇编器和链接器.
C编译器:将C语言源代码程序自动地编译成DSP汇编语言源 代码程序. 汇编器:将汇编语言源代码文件汇编成机器语言COFF目标文 件.
链接器:把汇编生成的可重定位的COFF目标模块和目标库文 件组合成一个可执行的COFF目标模块
SECTIONS:规定在存储器内何处放置输出段,即定义逻辑 段与目标存储器的对应关系。 已初始化的段: .cinit:标号标识部分存放已明确初始化的全局变量 和静态变量Page 0 .switch :标号标识部分存放对于大型的switch语句 的跳转表Page 0 .const:标号标识部分存放已明确初始化的字符串常 量、全局常量和静态常量Page 1 .text:标号标识部分存放可执行代码和浮点数常量
第1章genesis2000 自动化程序编写和运行环境

本章内容主要介绍genesis自动化程序编写运行环境:首先对genesis2000软件进行简单的介绍;而后介绍genesis2000自动化程序的开发方式和开发语言;最后介绍自动化程序在软件中的接口。
1.1、 genesis2000软件简介:Genesis2000软件是由Orbotech与Valor的合资公司—Frontline公司开发的CAM系统,其目的是为实工程现制前自动化,为CAM处理提供最佳解决方案,由于该软件拥有很强大的功能,很多PCB生产公司都已使用它为CAM 制前服务,笔者认为该软件有以下几方面的优点:1)令人喜欢的操作界面genesis2000软件界面设计人性化,操作简单,易学。
2)用ODB++格式,使用ODB++格式有以下三个优点:(1):使设计和制造之间数据交换最优化。
(2):目前唯一性的可扩充的结构。
(3):更精确的数据描述。
3)强大的操作辅助指令genesis2000软件的操作辅助指令可以简化很多复杂的工作,很简单的操作就可以达到我们想要的目的。
4)大的分析和优化功能genesis2000软件的Analysis和DFM功能在精密度要求越来越高的PCB行业显得极为重要,它自动进行精密的分析和优化,而用手动操作根本不可能实现。
5)自动化程序开发genesis2000软件的自动化程序可以让我们任何有规律的操作,有迹可寻的设定变成自动化,大大节省制作时间和减少人为误操作。
6)不断的围绕用户升级genesis2000软件不断围绕用户的需求进行开发新的实用的功能,笔者在使用的几年间,genesis2000开发了很多新的功能。
1.2:genesis2000软件自动化程序开发方式和语言:1.2.1genesis2000软件自动化程序的编写方式可分为以下三种:1)scripts2)hooks3)forms and flows1.2.2genesis2000软件自动化程序编写语言genesis2000软件自动化程序编写语言可以用多种语言进行实现:如SH、CSH、BSH、KSH、TCL/TK、PERL/TK,等等,本书主要介绍CSH,和PERL/TK两种比较常用的编写语言。
工业机器人编程技术的使用方法与调试策略

工业机器人编程技术的使用方法与调试策略工业机器人是一种能够自动执行各种任务的机器人系统,广泛应用于生产线、仓储物流等领域。
在实际使用中,工业机器人的编程技术和调试策略起着至关重要的作用。
本文将针对这两个方面进行详细介绍和讨论,帮助读者更好地掌握工业机器人的使用技巧和优化调试方法。
一、工业机器人编程技术的使用方法1. 确定任务需求:在开始编程之前,首先需要明确机器人要执行的任务需求。
这包括任务的种类、要求的运动轨迹、精度和速度等要素。
只有明确了任务需求,才能更有针对性地进行编程。
2. 选择编程语言和环境:工业机器人的编程语言有多种选择,如RAPID、Karel、RoboGuide等。
根据个人的熟悉程度和机器人的具体型号,选择一种合适的编程语言和开发环境。
同时,熟悉所选择的编程语言的语法和功能,能够更高效地进行编程。
3. 编写程序逻辑:根据任务需求,编写机器人的程序逻辑。
一般来说,程序包括初始化、运动控制、传感器数据处理等多个部分。
在编写过程中,可以根据具体需求使用条件语句、循环语句等控制结构,实现不同的运动逻辑。
4. 运动规划和轨迹生成:根据任务需求和机器人的运动能力,进行运动规划和轨迹生成。
这一过程需要结合机器人的运动学和动力学模型,确保机器人在执行任务时能够达到预期的位置、姿态和速度等要求。
5. 编程调试和优化:在编写完成后,进行编程调试和优化。
这包括机器人的仿真和实际运行测试,检查程序是否能够顺利执行,并根据实际情况进行调整和优化。
同时,注重编程的可读性和可维护性,方便后续的修改和维护工作。
二、工业机器人编程调试策略1. 调试环境的准备:在进行编程调试之前,需要准备好适当的调试环境。
包括拥有完整的机器人操作手册和编程手册,保证有足够的测试样本和测试工件,以及测试工具和设备的准备等。
在调试环境中,可以更好地模拟实际的工作情况,帮助发现问题和解决难题。
2. 分步调试:在进行编程调试时,应该采取分步调试的策略。
软件系统运维技术中开发环境和生产环境的区别

软件系统运维技术中开发环境和生产环境的区别在软件系统运维技术中,开发环境和生产环境是两个重要的概念。
开发环境是指软件开发人员用来编写、调试和测试代码的环境,而生产环境则是部署和运行实际生产应用程序的环境。
这两个环境在配置、功能和目的上存在一些明显的区别。
首先,开发环境的主要目的是为开发人员提供一个便于编写和调试代码的环境。
因此,在开发环境中,开发人员可以通过调试工具、日志记录和其他辅助工具来追踪和修复代码中的错误。
此外,开发环境通常会提供许多开发人员友好的特性,如自动补全、代码重构、实时错误检查等,以提高开发效率。
开发环境还可以容忍低效或不规范的代码,因为主要关注功能的实现而不是性能和稳定性。
相比之下,生产环境的主要目标是确保应用程序在真实的用户环境中稳定运行。
因此,在生产环境中,稳定性、性能和安全性是最重要的考虑因素。
为了实现这些目标,开发人员通常会使用编译、优化和压缩等技术来提高应用程序的性能。
此外,生产环境还会采取一系列安全措施,如访问控制、防火墙和数据备份,以保护应用程序和用户数据的安全。
另一个区别是硬件和软件配置。
开发环境通常使用较低配置的硬件和通用软件,以降低成本和提高开发人员的灵活性。
部署在开发环境中的应用程序通常只有少数用户访问,不需要处理大量的并发请求。
相比之下,生产环境通常需要更高配置的硬件和专业的软件来支持大规模并发访问、数据库管理和负载均衡等需求。
此外,开发环境和生产环境在数据上的处理方式也存在一些区别。
在开发环境中,开发人员通常使用虚拟数据、模拟数据或假数据来测试应用程序的功能。
这样可以避免对真实数据的修改或丢失可能造成的影响。
而在生产环境中,应用程序需要与真实的、大规模的数据集一起工作,因此必须进行独立的严格测试,以确保数据的完整性和正确性。
最后一个区别是变更管理的策略。
在开发环境中,开发人员通常可以轻松地进行代码变更、测试和回滚操作,以便进行快速迭代和开发。
而在生产环境中,对代码和配置的变更必须经过严格的审批和测试,以避免由于错误的变更引入的潜在问题。
熟悉汇编语言调试环境报告

班级:信1101-1班姓名:付亚飞学号:20112860实验一:熟悉汇编语言调试环境一、实验目的熟悉汇编语言调试环境,初步掌握如何编写和调试一个简单的汇编语言程序。
二、实验内容编写一个汇编程序,该程序完成在屏幕上输出字符的功能。
调试该程序,并输出显示结果。
本实验是考查学生对汇编的开发环境的熟练应用程度。
学生要会编写汇编的源程序,在DOS 环境下汇编源程序,链接源程序和执行程序。
三、实验分析这个程序最基本的要求是在屏幕上输出字符的功能,我想实现的是输入一个字符串然后在屏幕上输出,输入和输出要实现换行。
strrn db 0ah, 0dh, ‘$’实现了换行的功能。
四、实验代码DATAS SEGMENTstring db 10h,50 dup('?')strrn db 0ah, 0dh, '$'DATAS ENDSSTACKS SEGMENTSTACKS ENDSCODES SEGMENTASSUME CS:CODES,DS:DATAS,SS:STACKSSTART:MOV AX,DATASMOV DS,AXlea dx,stringmov ah,0ahint 21Hlea dx,strrnmov ah,09Hint 21Hmov bl,string+1mov bh,0mov byte ptr [string + 2 + bx], '$'mov ah,09hlea dx, string + 2int 21hmov ah,4chint 21hCODES ENDSEND START程序截图:五、实验总结本次实验不是很难,我参考了书本上的例题,然后自己有加入一些其他的功能,实现了输入和输出的功能。
自己这个学期刚接触汇编语言,所以我会认真的学习这门课程,通过实践编程来提高自己的能力。
idea简介及使用

idea简介及使用
Idea是一款Java开发环境,被广泛应用于Java编程。
它是一款由JetBrains公司开发的IDE,具有强大的代码编辑和调试功能,可以帮助开发人员更高效地开发Java应用程序。
Idea的主要特点是:智能代码编辑、自动代码提示、代码重构、代码分析、版本控制以及各种其他的高级功能。
这些功能是Idea的关键,它们可以帮助开发人员更加高效地编写代码,同时也可以降低代码出错的风险。
Idea的使用非常简单,只需要下载并安装Idea,然后创建一个新项目并开始编写代码即可。
Idea提供了许多模板和示例代码,可以帮助开发人员更快地开始编写代码。
此外,Idea还提供了丰富的文档和教程,可以帮助开发人员更好地了解和掌握Idea的各种功能。
除了Java开发之外,Idea还可以用于其他编程语言的开发,例如Kotlin、Scala、Python等。
这些语言都有着不同的特点和用途,但Idea可以提供各种适用于这些语言的开发工具和插件,使得开发人员可以更加轻松地使用Idea进行开发。
Idea是一款非常强大的开发环境,它可以帮助开发人员更高效地编写代码,同时也可以提供各种高级功能和工具,使得开发过程更加容易和愉快。
如果你是一名Java开发人员或者对其他编程语言也感兴趣,那么Idea绝对值得一试。
熟悉emu8086汇编语言调试环境实验报告

熟悉emu8086汇编语言调试环境实验报告=======================1. 实验目的-------本次实验的主要目的是熟悉并掌握emu8086汇编语言调试环境的使用,了解汇编语言的基本原理和编程方法,提升对计算机硬件和程序运行的理解。
2. 实验原理-------emu8086是一款用于学习和实验的8086微处理器模拟器。
它提供了一个集成开发环境(IDE),可以在此环境中编写、编译、调试和运行8086汇编语言程序。
3. 实验步骤-------以下是我们进行实验的具体步骤:步骤一:安装emu8086模拟器。
从官方网站下载并安装emu8086模拟器,确保正确安装并能够正常运行。
步骤二:打开模拟器并创建一个新项目。
在模拟器的IDE中,选择“文件”->“新建”->“项目”,然后为项目命名并选择存储位置。
步骤三:编写汇编语言程序。
在项目中创建一个新的汇编文件,使用8086汇编语言编写一个简单的程序。
例如,可以编写一个程序来输出“Hello, World!”到屏幕上。
步骤四:编译程序。
在模拟器的IDE中,选择“编译”->“编译全部”,将汇编文件编译成机器码。
步骤五:运行程序。
在模拟器的IDE中,选择“运行”->“运行”,或者直接按下F9键,来运行程序。
步骤六:调试程序。
如果程序运行出现问题,可以使用emu8086的调试功能来查找和修复错误。
在模拟器的IDE中,选择“调试”->“开始调试”,然后使用调试工具来检查程序的状态、寄存器和内存。
4. 实验结果-------通过本次实验,我们成功地编写、编译、运行并调试了一个简单的8086汇编语言程序。
我们实现了在屏幕上输出“Hello, World!”的目标,并且深入了解了emu8086模拟器的使用方法和8086汇编语言的编程技巧。
5. 实验分析-------通过本次实验,我们深入了解了8086汇编语言的编程方法和计算机硬件的基本原理。
PLC编程语言和开发环境的介绍
PLC编程语言和开发环境的介绍PLC(Programmable Logic Controller,可编程逻辑控制器),是一种专用于工业自动化控制系统的设备。
在现代工业控制系统中,PLC 起到了至关重要的作用,广泛应用于制造业、能源行业、交通运输等领域。
为了实现对PLC的编程和控制,人们需要掌握PLC编程语言和相应的开发环境。
一、PLC编程语言的种类PLC编程语言是一种专用的程序设计语言,用于编写PLC控制系统的逻辑操作。
常见的PLC编程语言主要有以下几种:1. 梯形图(Ladder Diagram,LD)梯形图是最常用的PLC编程语言,其核心思想源于传统的电路图设计。
梯形图通过多个水平的并排线段和垂直的电源线分支组成,可以方便地表示逻辑关系、循环和并行操作。
2. 功能块图(Function Block Diagram,FBD)功能块图是一种基于图形符号和连线的PLC编程语言。
它将复杂的逻辑操作分解为不同的功能块,每个功能块代表特定的功能或操作,通过连线连接不同的功能块实现数据传递和逻辑控制。
3. 指令列表(Instruction List,IL)指令列表是一种基于文本的PLC编程语言,类似于常见的高级编程语言。
程序员通过编写一系列的指令和函数来实现逻辑操作,程序执行时按照指令的顺序逐步执行。
4. 顺序功能图(Sequential Function Chart,SFC)顺序功能图是一种基于状态转换的PLC编程语言,主要用于描述系统运行状态和各种操作的执行顺序。
通过定义状态和条件,以及状态之间的转换关系,实现系统的有序控制。
二、PLC开发环境的特点PLC开发环境是程序员用来编写、调试和测试PLC程序的工具。
不同的PLC厂商提供了各自的开发环境,但整体上具有以下几个共同的特点:1. 编程界面直观友好PLC开发环境的界面通常采用直观友好的图形化设计,使得程序员可以直观地展示和编辑PLC程序的各个部分。
通过拖拽、配置参数等方式,实现对PLC设备的灵活配置。
汇编语言程序设计的实验环境及上机步骤

汇编语言程序设计的实验环境及上机步骤一、实验环境汇编语言程序设计的实验环境如下:1.硬件环境微型计算机(Intel x86系列CPU)一台2.软件环境⏹Windows98/2000/XP操作系统⏹任意一种文本编辑器(EDIT、NOTEPAD(记事本)、UltraEDIT等)⏹汇编程序(MASM.EXE或TASM.EXE)⏹连接程序(LINK.EXE或TLINK.EXE)⏹调试程序(DEBUG.EXE或TD.EXE)文本编辑器建议使用EDIT或NOTEPAD,汇编程序建议使用MASM.EXE,连接程序建议使用LINK.EXE,调试程序建议使用TD.EXE。
二、上机实验步骤注:以下步骤适用于除汇编语言程序设计的实验一到实验四外的所有实验(实验一到实验四仅使用TD.EXE)。
1.确定源程序的存放目录建议源程序存放的目录名为ASM(或MASM),并放在C盘或D盘的根目录下。
如果没有创建过此目录,请用如下方法创建:通过Windows的资源管理器找到C盘的根目录,在C盘的根目录窗口中点击右键,在弹出的菜单中选择“新建”→“文件夹”,并把新建的文件夹命名为ASM。
请把MASM.EXE、LINK.EXE、DENUG.EXE和TD.EXE都拷贝到此目录中。
2.建立ASM源程序建立ASM源程序可以使用EDIT或NOTEPAD(记事本)文本编辑器。
下面的例子说明了用EDIT文本编辑器来建立ASM源程序的步骤(假定要建立的源程序名为HELLO.ASM),用NOTEPAD(记事本)建立ASM源程序的步骤与此类似。
在Windows中点击桌面左下角的“开始”按钮→选择“运行”→在弹出的窗口中输入“ C:\ASM\HELLO.ASM”,屏幕上出现EDIT的编辑窗口,如图1所示。
图1 文本编辑器EDIT的编辑窗口窗口标题行显示了EDIT程序的完整路径名。
紧接着标题行下面的是菜单行,窗口最下面一行是提示行。
菜单可以用Alt键激活,然后用方向键选择菜单项,也可以直接用Alt-F打开File文件菜单,用Alt-E打开Edit编辑菜单,等等。
Tesla GPU 集群服务器使用手册
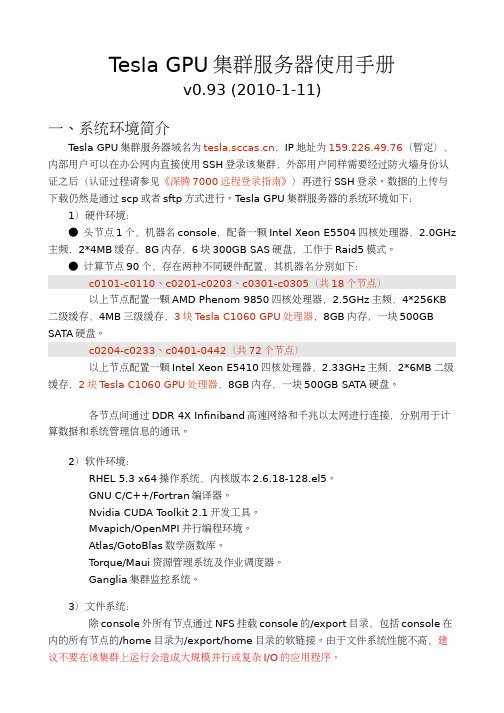
T esla GPU集群服务器使用手册v0.93 (2010-1-11)一、系统环境简介T esla GPU集群服务器域名为,IP地址为159.226.49.76(暂定),内部用户可以在办公网内直接使用SSH登录该集群,外部用户同样需要经过防火墙身份认证之后(认证过程请参见《深腾7000远程登录指南》)再进行SSH登录。
数据的上传与下载仍然是通过scp或者sftp方式进行。
T esla GPU集群服务器的系统环境如下: 1)硬件环境:● 头节点1个,机器名console,配备一颗Intel Xeon E5504四核处理器,2.0GHz 主频,2*4MB缓存,8G内存,6块300GB SAS硬盘,工作于Raid5模式。
● 计算节点90个,存在两种不同硬件配置,其机器名分别如下:c0101-c0110、c0201-c0203、c0301-c0305(共18个节点)以上节点配置一颗AMD Phenom 9850四核处理器,2.5GHz主频,4*256KB 二级缓存,4MB三级缓存,3块T esla C1060 GPU处理器,8GB内存,一块500GB SATA硬盘。
c0204-c0233、c0401-0442(共72个节点)以上节点配置一颗Intel Xeon E5410四核处理器,2.33GHz主频,2*6MB二级缓存,2块T esla C1060 GPU处理器,8GB内存,一块500GB SATA硬盘。
各节点间通过DDR 4X Infiniband高速网络和千兆以太网进行连接,分别用于计算数据和系统管理信息的通讯。
2)软件环境:RHEL 5.3 x64操作系统,内核版本2.6.18-128.el5。
GNU C/C++/Fortran编译器。
Nvidia CUDA T oolkit 2.1开发工具。
Mvapich/OpenMPI并行编程环境。
Atlas/GotoBlas数学函数库。
T orque/Maui资源管理系统及作业调度器。
VisualC集成开发环境

VisualC集成开发环境VisualC是微软推出的一套集成开发环境(IDE),用于开发基于Windows平台的应用程序。
它提供了一整套工具和功能,使开发人员能够轻松地编写、调试和部署各种类型的应用程序。
在本文中,我们将详细介绍VisualC集成开发环境的功能、特点和使用方法。
功能和特点VisualC集成开发环境具有许多强大的功能和特点,使其成为开发Windows应用程序的理想选择。
以下是其主要功能和特点:1.代码编辑器:VisualC内置了强大的代码编辑器,支持语法高亮、代码折叠、自动补全等功能,使开发人员可以更高效地编写代码。
2.调试器:VisualC提供了强大的调试器,支持逐步调试、观察变量值、设置断点等功能,帮助开发人员找出和修复代码中的问题。
3.项目管理:VisualC支持创建和管理项目,包括控制台应用程序、Windows桌面应用程序、库项目等,使开发人员可以轻松组织和管理代码。
4.GUI设计器:VisualC提供了GUI设计器,支持可视化设计界面,使开发人员可以直观地设计用户界面,并生成相应的代码。
5.集成开发环境:VisualC集成了多种开发工具和组件,包括编译器、链接器、资源编辑器等,使开发人员可以在同一个界面内完成整个开发过程。
6.扩展性:VisualC支持丰富的扩展插件,开发人员可以根据自己的需求安装和使用各种扩展,扩展VisualC的功能和特性。
7.跨平台:VisualC不仅支持Windows开发,还可以用于开发跨平台的应用程序,包括移动应用程序、Web应用程序等。
使用方法安装VisualC集成开发环境要使用VisualC集成开发环境,首先需要下载并安装Visual Studio。
可以从微软官方网站上下载Visual Studio的安装程序,并根据提示逐步安装。
创建项目在打开Visual Studio后,可以选择新建项目,选择项目类型(如控制台应用程序、Windows桌面应用程序等)以及项目名称和保存路径,然后点击“确定”按钮,即可创建一个新项目。
机器人控制器的程序编写说明书

机器人控制器的程序编写说明书一、概述本说明书旨在为操作人员提供机器人控制器程序编写的具体指导。
本程序适用于机器人控制系统,用于编写控制程序以实现机器人的运动、操作和功能控制。
二、编写环境搭建1. 硬件设备准备在开始编写机器人控制器程序之前,需要确保以下硬件设备齐全并连接正常:- 控制器主机:保证控制器主机的电源供应和网络连接正常- 机器人设备:将机器人设备正确连接到控制器主机上2. 软件环境准备为了编写机器人控制器程序,需要进行以下软件环境的搭建:- 控制器软件:安装最新版本的机器人控制器软件,并确保软件与控制器主机兼容- 开发环境:根据机器人控制器软件的要求,安装相应的开发环境,如IDE、编译器等三、控制器程序编写步骤1. 确定机器人运动和功能需求在编写机器人控制器程序之前,首先需要明确机器人的运动和功能需求。
这包括机器人的轨迹规划、动作序列、传感器数据处理等。
2. 编写控制程序代码根据机器人的需求,在控制器软件中编写相应的控制程序代码。
以下是一些编程技巧和注意事项:- 使用合适的编程语言:选择适合的编程语言来编写机器人控制器程序,如C++、Python等,确保语言的兼容性和性能要求。
- 模块化编程:将程序拆分为多个模块,每个模块负责不同的功能,提高代码的可读性和可维护性。
- 错误处理和异常处理:确保程序具备错误处理和异常处理机制,防止因程序错误导致机器人运行异常或危险情况的发生。
- 考虑性能优化:在编写控制程序时,考虑代码的性能优化,以提高机器人运行的效率和响应速度。
3. 调试和测试在编写完控制程序后,进行调试和测试以验证程序的正确性和稳定性。
可以通过以下步骤进行:- 单元测试:逐个测试程序中的模块和函数,确保其能够按照预期工作。
- 整体测试:将所有模块组合起来进行整体测试,验证机器人能够正常运行,并检查是否需要进行进一步的优化和调整。
4. 文档编写完成控制程序编写和测试后,编写详细的文档来记录程序的功能、接口、使用方法等信息。
程序编写说明书

程序编写说明书一、概述程序编写说明书是指对某一软件或程序进行编写时所需要遵循的规范和步骤的详尽解释。
本文将为您提供一份程序编写说明书的范例,以便您在编写程序时能够有一个清晰的指导。
二、环境准备在编写程序之前,需要确保您已经安装了以下环境和工具:1. 操作系统:请使用操作系统(如Windows、Linux等)的最新版本,确保系统的稳定性和兼容性。
2. 开发工具:为了编写程序,您需要选择一种适合您的开发语言的集成开发环境(IDE),比如Java可以选择Eclipse、Python可以选择PyCharm等。
3. 软件依赖:如果您的程序需要使用到其他软件库或框架,需要提前安装和配置好相关的依赖项。
三、需求分析在编写程序之前,应该充分了解和分析软件的需求,包括功能需求和非功能需求。
在这个阶段,您应该对需求进行梳理,并制定一个详细的规格说明书。
四、设计在进行程序设计时,应该遵循以下步骤:1. 划分模块:根据需求将程序划分为不同的模块,每个模块负责完成特定的功能。
2. 设计数据结构:根据需求和模块功能,设计合适的数据结构,以便存储和处理数据。
3. 设计算法:通过分析需求,确定每个功能的算法步骤,并进行详细的设计。
五、编码实现在进行编码实现时,需要注意以下几点:1. 使用有意义的变量和函数名:变量和函数名应该具有描述性,以增强代码的可读性和可维护性。
2. 代码缩进和格式化:为了代码的可读性,应该采用一致的缩进和格式化规范,遵循团队或项目的编码规范。
3. 错误处理和异常处理:合理处理可能出现的错误和异常情况,避免程序崩溃或不正常运行。
4. 注释和文档:在代码中添加必要的注释,以便他人理解和维护代码。
同时,编写文档说明程序的使用方法和功能。
六、测试与调试在编写程序完成后,应该进行充分的测试和调试,以保证程序的质量和正确性。
1. 单元测试:对每个模块进行单元测试,保证每个模块的功能正确。
2. 集成测试:将各个模块进行集成测试,确保模块之间的协调和配合。
JNI开发与调试流程

JNI开发与调试流程JNI(Java Native Interface)是一种允许Java应用程序与其他编程语言(如C++、C等)进行交互的技术。
开发和调试JNI需要遵循一定的流程,下面是一个关于JNI开发与调试流程的详细介绍。
一、JNI开发流程:1. 确定接口:首先确定需要在Java应用程序和C/C++代码之间建立的接口。
要确定接口的数据类型、方法参数、方法名称和返回值类型等。
2. 编写Java代码:在Java应用程序中编写调用JNI接口的Java代码,包括声明native方法和使用System.loadLibrary(加载动态链接库。
3. 编写C/C++代码:在C/C++环境中编写实现JNI接口的C/C++代码,实现Java代码中声明的native方法。
这些C/C++代码需要与操作系统和编译器兼容。
4. 生成动态链接库:将C/C++代码编译成动态链接库,以供Java应用程序调用。
具体的编译过程会因操作系统和编译器而有所不同。
5. 测试与调试:通过调用Java应用程序来测试JNI接口的正确性和性能。
可以使用调试器等工具来定位和修复问题。
二、JNI调试流程:1. 准备调试环境:在开发JNI之前,首先需要准备好调试环境。
这包括安装并配置Java JDK、C/C++编译器和调试器等。
2.设置调试参数:在调试过程中,需要设置一些调试参数,例如设置断点、参数传递、环境变量等。
这样可以更方便地跟踪和调试代码。
3. 启动调试器:使用调试器启动Java应用程序,并指定要调试的JNI代码。
调试器会在Java代码和C/C++代码之间切换,方便跟踪代码执行流程。
4.设置断点:在需要调试的代码行上设置断点,以便在程序执行到该行时暂停程序的执行,可以逐行查看代码执行情况。
5.单步调试:在断点处暂停后,使用调试器提供的单步调试功能,可以逐行查看代码的执行情况,包括变量的值、函数的返回值等。
6.观察变量:在调试过程中,可以观察和监视变量的值,以便查找代码中的错误或问题。
VisualC集成开发环境

VisualC集成开发环境Visual C++是微软公司为开发Windows操作系统应用程序而推出的一种集成开发环境(IDE)。
它为开发者提供了一套完整的工具和功能,使他们能够高效地创建、调试和部署C++应用程序。
下面将详细介绍Visual C++集成开发环境。
Visual C++集成开发环境提供了丰富的功能和工具,使开发者能够在一个统一的界面下完成整个应用程序的开发过程。
它包括代码编辑器、调试器、编译器、资源编辑器等核心工具,以及代码生成器、库管理器、性能分析器等辅助工具。
通过这些工具,开发者可以方便地编写代码、调试程序、管理项目,并且进行性能优化。
首先,Visual C++的代码编辑器提供了丰富的功能,如语法高亮、自动完成、代码折叠等,使开发者能够更加高效地编写代码。
并且,它还支持多种编程语言,如C++、C#、等,可以方便地进行跨语言开发。
另外,它还提供了代码重构功能,可以帮助开发者重构代码、改进程序的结构,提高代码质量。
其次,Visual C++的调试器是其强大的功能之一。
它提供了多种调试工具和选项,如断点、单步执行、变量监视等,使开发者能够方便地调试程序。
并且,它还支持远程调试,可以在远程计算机上进行程序调试,方便开发者在多个环境中进行开发和测试。
此外,Visual C++还具有强大的编译器,可以将C++代码编译为可执行文件,并且支持多种编译选项,如优化、调试信息等。
开发者可以根据项目需求选择不同的编译选项,以获得最佳的代码性能和可调试性能。
Visual C++还包含了丰富的库和工具集,开发者可以方便地使用这些库和工具集来加快开发速度。
其中一些库包括MFC、ATL、STL等,可以帮助开发者快速构建Windows应用程序。
另外,它还提供了一套资源编辑器,使开发者能够方便地编辑和管理程序的资源,如图像、音频等。
除了以上核心功能和工具,Visual C++还提供了一系列辅助工具,如代码生成器、库管理器、性能分析器等,方便开发者进行代码生成、库管理和性能优化。
派森软件包自带的集成开发环境
派森软件包自带的集成开发环境派森软件包(Python Software Package)是一个用于开发Python程序的集成开发环境(Integrated Development Environment,简称IDE)。
派森软件包自带的IDE提供了丰富的功能和工具,使得开发者可以更加高效地编写、调试和运行Python代码。
一、派森软件包自带的集成开发环境简介派森软件包自带的集成开发环境是一个名为IDLE(Integrated Development and Learning Environment)的工具。
它是一个轻量级的IDE,专门为Python语言设计和优化。
IDLE提供了一系列功能和工具,方便开发者进行代码编辑、调试和运行。
二、IDLE的主要特点和功能1. 代码编辑器:IDLE提供了一个简单易用的代码编辑器,支持语法高亮显示、自动缩进等功能。
开发者可以在编辑器中编写Python代码,并实时查看代码的变化。
2. 交互式解释器:IDLE内置了一个交互式解释器,可以直接执行Python代码并查看结果。
这个解释器类似于命令行界面,但提供了更友好的用户界面和操作方式。
3. 调试器:IDLE还集成了一个调试器,可以帮助开发者找出代码中的错误并进行调试。
调试器支持设置断点、逐行执行代码、查看变量值等功能,大大提高了代码调试的效率。
4. 自动补全:IDLE具有自动补全功能,可以根据已输入的字符自动提示可能的代码补全选项。
这个功能可以减少开发者的输入工作量,并避免拼写错误。
5. 代码片段管理:IDLE提供了一个代码片段管理器,可以方便地保存和管理常用的代码片段。
开发者可以在需要时快速插入这些代码片段,提高编码效率。
6. 文档浏览器:IDLE内置了Python官方文档的浏览器,可以方便地查阅Python语言和标准库的相关文档。
这个功能对于学习和理解Python语法和库函数非常有帮助。
7. 扩展性:IDLE是一个开放式的IDE,允许开发者通过插件扩展其功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有效的4个属性包括:
R 表示存储器可以读出;
W 表示存储器可以写入;
X 表示存储器含有可执行代码;
I 表示存储器可以初始化。
origin
表示存储器范围的起始地址。
length 表示存储器范围的长度。
13
DSP芯片技术及应用
SECTIONS伪指令的一般语法
SECTIONS
{ name :[property,property,property,…] name :[property,property,property,…] name :[property,property,property,…]
1
DSP芯片技术及应用
定义段的伪指令
定义段的伪指令:把汇编语句程序的各部分与适当 的段联系起来。
(1).asect 创建具有绝对地址的初始化命名段。包含代码或
数据。在绝对段内,用户可以使用.label伪指令来定义可重定位
标号。
(2).bss 为未初始化的变量。在.bss段内保留存储器空间。
(3).sect 定义初始化命名段并把后续代码或数据与该段相
}
以name(名字)开始的段的规格说明定义了一个输 出段。
在段名之后是特性列表,定义段的内容以及它们是
怎样被分配的,特性可以用逗号来分开.
14
DSP芯片技术及应用
段可能具有的特性:
(1)装载位置:规定段将被装载在存储器内何处; (2)运行位置:定义段将在存储器内何处运行; (3)输入段:定义组成输出段的输入段; (4)段类型:定义特定段类型的标志; (5)填充值:定义用于填充未初始化空位的数值。
定义的符号。
6
DSP芯片技术及应用
第4章 程序编写和调试环境简介
2. 3种基本的文件
源程序: 汇编语言文件:后缀为.asm,C混编 .c
头文件:后缀为.h, 包含以字符定义的一些寄存器 命令文件:后缀为.cmd,实现对程序存储器和数据存 储器空间的分配。(一般写好后不再改动) 命令文件中常用的伪指令有:MEMORY 和 SECTIONS。
初始化常数的伪指令
(1).byte:将一个或多个8位的数值置入当前段连续 的字中。除了每个数值的宽度限制为8位以外, 与.word类似。 (2).int和.word:将2个或多个16位值置入当前段 的连续字中。
(3).long和.blong:将32位数值置入当前段连续两 个字中,先存放低位字。
.blong:保证目标不会跨越数据页的边界。
10
DSP芯片技术及应用
命令文件 .CMD
命令文件名的后缀为.CMD,命令文件实现对程序存储 器空间和数据存储器空间的分配。
文件常用的伪指令有MEMORY和SECTIONS伪指令。
MEMORY :用来标示实际存在目标系统中且可被 使用的存储器范围,每个存储器范围具有名字,起 始地址和长度。
SECTIONS :描述输入段怎样被组合到输出段内; 在可执行程序内定义输出段;规定在存储器内何处放 置输出段;允许重命名输出段。
19
DSP芯片技术及应用
各类仿真器品牌及接口类型
20
DS
22
DSP芯片技术及应用
23
DSP芯片技术及应用
24
DSP芯片技术及应用
25
DSP芯片技术及应用
26
DSP芯片技术及应用
27
DSP芯片技术及应用
作业
根据如下的存储空间配置,编写一个*.CMD文件,并在本文件中 对.text, .vectors(有自定义的中断向量段),.bss段定位。 其 中,.bss定位在B2区)
11
DSP芯片技术及应用
Memory伪指令的一般语法
MEMORY
{ PAGE0: namel[(attr)]: origin=constant ,length=constant; PAGEn: namen[(attr)]: origin=constant ,length=constant;
}
PAGE 标示存储器空间。用户可以规定多达255数
15
DSP芯片技术及应用
命令文件实现 对程序存储器空间 和数据存储器空间 的分配
MEMORY指 明目标系统中可被 使用的存储器范围
SECTIONS主 要标明输出段在存 储器中的一般位置
16
DSP芯片技术及应用
4.2 调试环境代码编译器CC
17
DSP芯片技术及应用
18
DSP芯片技术及应用
采用传统的电路仿真方法很难实现可靠的仿真
据页。
PAGE0规定程序存储器,PAGE1规定数据存储器。
name
命名存储器范围。存储器可以是1至8个字
符。在不同页上的存储器范围可以具有相同的名字,
但是在一页之内所有的存储器范围必须具有唯一的名
字12 且必须不重叠。
DSP芯片技术及应用
attr
规定与已命名范围有关的1~4个属性。
未规定属性的存储器具有所有4个属性。
其中可定义常用的 (部分)寄存器、宏、 用户自定义的变量等
头文件的使用使软 件编程的灵活性和程序 的可读性大大提高
9
DSP芯片技术及应用
P95页 头文件
混编中寄存器都是以指针方式进行寻址
volatile 告诉编译器变量是随时可能发生变化的,每次使
用它的时候必须从i的地址中读取,因而编译器生成的可执 行码会重新读取数据. 而优化做法是,由于编译器发现两次读数据的代码之间的 代码没有对i进行过操作,它会自动用上次读的数据。而不 是重新读。这样以来,如果i是一个寄存器变量或者表示一 个端口数据就容易出错,所以说volatile可以保证对特殊地 址的稳定访问,不会出错。
联系。用.sect定义的段可包含代码或数据。
(4).text 标示.text段内代码部分。.text段通常包含可执行
代码。
(5).usect 在 未 初 始 化 命 名 段 内 保 留 空 间 。 .usect 伪 指 令
和.bss伪指令相类似,但是它允许用户与段.bss分开保留空间。
2
DSP芯片技术及应用
28
DSP芯片技术及应用
中读入源语句。
当汇编器完成从copy(复制)或者include(包含)
文件内读入源语句时,恢复从当前文件读源语句。
(2).def:识别在当前模块中定义且可以被其它模
块使用的符号。
(3).global:声明外部符号。
.global伪指令对于已定义符号起.def的作用,对于未
定义符号起.ref的作用。
(4).ref:识别在当前模块中使用但在其它模块中
(2).label:定义一个特定的标号,表示当前段的 装载地址。当段在一个地址处装载但在另一个地址 处运行时,该指令特别有用。
(3).version:告诉汇编器该代码是属于哪一种处 理器。.version伪指令必须出现在指令之前,否则将 出错。
5
DSP芯片技术及应用
引用其它文件的伪指令
(1).copy和.include:告诉汇编器开始从其它文件
第4章 程序编写和调试环境简介
4.1 程序的编写
TMS320LF240x DSP提供两种编程语言:汇编语 言和C/C++语言
下面的介绍以汇编语言为主
进入程序调试之前要求有3种格式的文件:头文件、 汇编语言文件和命令文件
1. 常用的几个汇编伪指令 * 定义段的伪指令: .sect .bss .text等 * 初始化常数的伪指令:.word .int .byte 等 * 引用其他文件的伪指令: .copy .include .global .def .ref 等
3
DSP芯片技术及应用
汇编时(Assembly-Time)符号伪指令
.set和.equ:把常量值赋予符号。
类C的结构定义使用户能把类似的元素组合在 一起,然后把元素偏移量(offest)的计算留 给汇编器。
4
DSP芯片技术及应用
其他伪指令
(1).end:终止汇编。它是一个程序的最后一条源 语句。此伪指令与文件结束符具有同样的效果。
7
DSP芯片技术及应用
寄存器头文件F2407_C.H
F2407_C.H头文件中定义DSP系统用到的一些寄存 器映射地址。用户用到的常量和用户自定义的寄存 器都在头文件中定义,头文件名的后缀为.H。 寄存器头文件可以从其他文件或相关资料中复制, 或复制后根据需要进行修改。
8
DSP芯片技术及应用
左图为纯汇编使用 的头文件 F2407REGS.H的片断。