三相无感无刷直流电动机驱动器IC A
PT2432 PT2432A 3 相无传感器无刷直流马达驱动器说明书
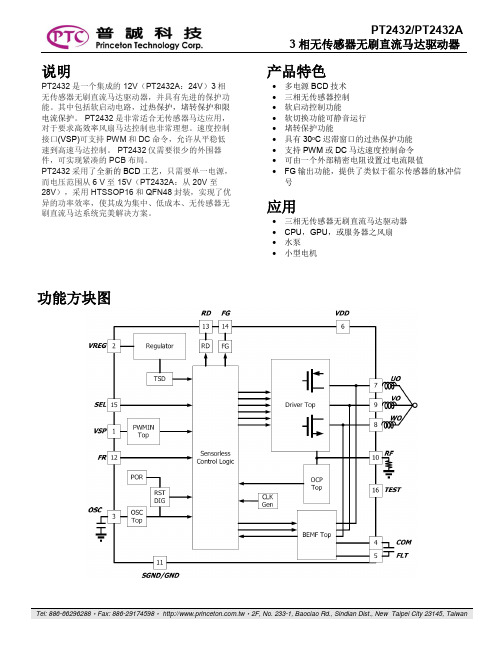
PT2432/PT2432A 3相无传感器无刷直流马达驱动器说明PT2432是一个集成的12V(PT2432A:24V)3相无传感器无刷直流马达驱动器,并具有先进的保护功能。
其中包括软启动电路,过热保护,堵转保护和限电流保护。
PT2432是非常适合无传感器马达应用,对于要求高效率风扇马达控制也非常理想。
速度控制接口(VSP)可支持PWM和DC命令,允许从平稳低速到高速马达控制。
PT2432仅需要很少的外围器件,可实现紧凑的PCB布局。
PT2432采用了全新的BCD工艺,只需要单一电源,而电压范围从6 V至 15V(PT2432A:从20V 至28V),采用HTSSOP16和QFN48封装,实现了优异的功率效率,使其成为集中、低成本、无传感器无刷直流马达系统完美解决方案。
产品特色∙多电源BCD技术∙三相无传感器控制∙软启动控制功能∙软切换功能可静音运行∙堵转保护功能∙具有30o C迟滞窗口的过热保护功能∙支持PWM或DC马达速度控制命令∙可由一个外部精密电阻设置过电流限值∙FG输出功能,提供了类似于霍尔传感器的脉冲信号应用∙三相无传感器无刷直流马达驱动器∙CPU,GPU,或服务器之风扇∙水泵∙小型电机功能方块图HTSSOP16应用电路应用电路组件值表Notes : 1. C2和C3是取决于马达类型.2. R1是取决于马达的应用.QFN48应用线路应用电路组件值表Notes : 1. C3和C4是取决于马达类型.2. R1和R2是取决于马达的应用.HTSSOP16引脚配置引脚说明QFN48引脚配置引脚说明功能說明电源PT2432提供一种内建电压稳压器,除了输出驱动级外,供电给模拟与数字电路区块。
驱动级的负载是马达线圈,呈现电感特性,当马达开始转动,会引导出大电流和尖峰电压。
需要一个合适的旁路电容,并尽可能的放置接近VDD引脚来减少这些尖峰。
此外,加入一个15V(PT2432A:28V)齐纳二极管将帮助抵御从马达反电动势(BEMF)电压。
直流无刷电机驱动器ATE33035(MC33035)使用说明
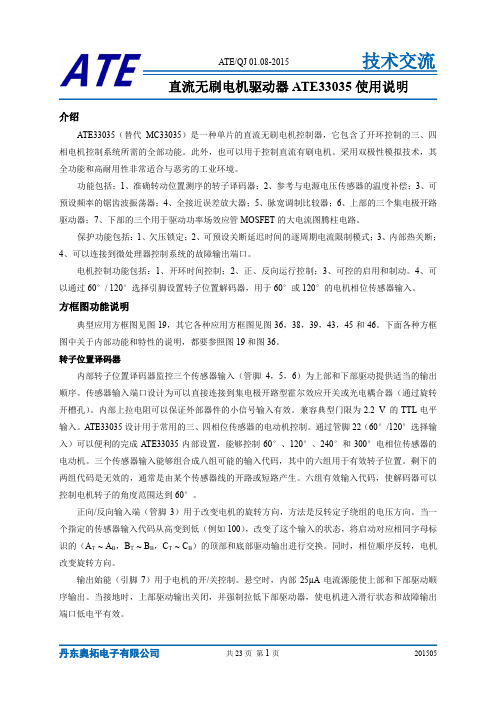
直流无刷电机驱动器ATE33035使用说明介绍ATE33035(替代MC33035)是一种单片的直流无刷电机控制器,它包含了开环控制的三、四相电机控制系统所需的全部功能。
此外,也可以用于控制直流有刷电机。
采用双极性模拟技术,其全功能和高耐用性非常适合与恶劣的工业环境。
功能包括:1、准确转动位置测序的转子译码器;2、参考与电源电压传感器的温度补偿;3、可预设频率的锯齿波振荡器;4、全接近误差放大器;5、脉宽调制比较器;6、上部的三个集电极开路驱动器;7、下部的三个用于驱动功率场效应管MOSFET的大电流图腾柱电路。
保护功能包括:1、欠压锁定;2、可预设关断延迟时间的逐周期电流限制模式;3、内部热关断;4、可以连接到微处理器控制系统的故障输出端口。
电机控制功能包括:1、开环时间控制;2、正、反向运行控制;3、可控的启用和制动。
4、可以通过60°/ 120°选择引脚设置转子位置解码器,用于60°或120°的电机相位传感器输入。
方框图功能说明典型应用方框图见图19,其它各种应用方框图见图36,38,39,43,45和46。
下面各种方框图中关于内部功能和特性的说明,都要参照图19和图36。
转子位置译码器内部转子位置译码器监控三个传感器输入(管脚4,5,6)为上部和下部驱动提供适当的输出顺序。
传感器输入端口设计为可以直接连接到集电极开路型霍尔效应开关或光电耦合器(通过旋转开槽孔)。
内部上拉电阻可以保证外部器件的小信号输入有效。
兼容典型门限为2.2 V 的TTL电平输入。
ATE33035设计用于常用的三、四相位传感器的电动机控制。
通过管脚22(60°/120°选择输入)可以便利的完成A TE33035内部设置,能够控制60°、120°、240°和300°电相位传感器的电动机。
三个传感器输入能够组合成八组可能的输入代码,其中的六组用于有效转子位置。
三相直流无刷电机工作原理
三相直流无刷电机工作原理
三相直流无刷电机是一种没有刷子和换向器的电机,采用电子换向技术来实现转子的换向和驱动。
其工作原理基于电磁感应和电子控制两个主要原理。
首先,三相直流无刷电机的转子上有若干个磁极,固定在定子的内部。
定子上则布置了三个相互平衡的绕组,分别称为A 相、B相和C相。
这三个绕组分别与电源连接,形成一个闭合的电路。
当通过A相绕组传入电流时,产生的磁场与转子上的磁极相互作用,使得转子受到电磁力的作用而开始转动。
接着,当转子旋转到某个位置时,A相绕组的电流就会被切断,而B相绕组的电流则开始流动。
由于转子上的磁极位置发生了变化,同样的,磁场与转子的磁极相互作用,进一步推动转子继续旋转。
这个过程将会不断重复,三个相互平衡的绕组依次通电,不断地产生电磁力,并将转子驱动到连续旋转的模式。
而这个过程的控制则是通过电子线路来实现的。
通过使用传感器来确定转子的位置,并将这些信号传输给电子线路。
电子线路会根据传感器信号来控制绕组的通电情况,实现适时的换向控制。
这样,转子就能按照预定的速度和方向进行旋转。
三相无刷直流电机工作原理的关键在于电子线路的准确控制和
换向的实现,可以通过电子线路中的逻辑门、触发器、半导体等元件来实现精确的换向控制,从而保证电机的稳定运行和高效性能。
三相直流无刷霍尔电机驱动器说明书
前言本款产品适合驱动持续工作电流在10A以下、额定电压范围在12V~40V之间的任何一款三相直流无刷霍尔电机。
具有免维护、长寿命、低速下总能保持最大转矩等优势。
本产品广泛应用于针织设备、医疗设备、食品机械、电动工具、园林机械、智能家居等电气自动化控制领域。
本手册阐述了该驱动器的的功能、安装、调试、维护、运行等方面的内容。
使用产品前,请认真阅读本手册并熟知本产品的安全注意事项。
在使用本款产品时,若有疑问,请仔细查阅产品说明书或致电我公司售后服务部,我们将竭诚为您服务。
安全注意事项警示标志:危险:表示该操作错误可能危及人身安全!注意:表示该操作错误可能导致设备损坏!注意事项:安装:防止灰尘、腐蚀性气体、导电物体、液体及易燃物侵入,并保持良好的散热条件。
接线:请由专业人员仔细阅读完使用说明之后进行接线作业;接线必须在电源断开的状态下进行,防止电击。
通电前:接通电源前检查并保证接线的准确无误;请确认输入电源与驱动器的额定工作电压及极性是否一致;通电中:驱动器接通电源后,请勿直接接触输出端子,有的端子上有高电压,非常危险;请确保在驱动器指示灯熄灭后再对驱动器的接线端子进行插拔;请勿对驱动器随意进行耐高压与绝缘性能试验;请勿将电磁接触器、电磁开关接到输出回路。
目录前言 (1)安全注意事项 (2)目录 (3)一.概述 (5)1.型号说明 (5)2.功能参数 (5)3.功能特点 (6)二.端口说明 (7)1.接口定义 (7)2.接线示意图 (8)3.安装尺寸 (9)三.功能与使用 (10)1.出厂说明 (10)2.操作步骤说明 (10)2.1外置电位器调速 (11)2.2外部电压调速 (11)2.3外部PWM信号调速 (11)2.4CAN总线控制 (11)3.功能端子说明 (12)3.1F/R端子:正反转功能 (12)3.2EN端子:使能功能 (12)3.3BRK端子:刹车抱死功能 (12)3.4SV端子:外部调速端子 (13)3.5PG端子:电机转速信号输出 (13)3.6ALM端子:报警输出 (13)3.7PWR/ALM:指示灯 (14)一.概述本款驱动器适用于对直流无刷有霍尔电机进行转速控制,其最大的优点是在低速时总能控制电机保持最大转矩。
JY01A无刷电机驱动IC
直流无刷电机驱动IC版本号:V1.0 日期:2013年5月28日一.特色:三.封装形态二.简介:● 军工品质,工作稳定● 用于有霍尔/无霍尔无刷电机驱动 ● 正/反转控制,软切换功能 ● 转速线性调节 ● 过流保护 ● 短路保护 ● 欠压保护● DSP 核H_PWM 驱动低噪音●JYKJ 特有技术,保证了在任何工况下电机都能正常运转● 有霍尔与无霍尔应用自动识别功能 ●外围电路简单,使用方便JY01A 是一款多功能的无刷电机驱动IC ,可用于有霍尔、无霍尔无刷电机驱动。
具备调速,正反转,过流保护,短路保护,欠压保护等功能,军工级品质,工作稳定,防干扰能力强等特点。
四.电气特性:(一)绝对最大额定值V DD………………………………………………………………………………相对于GND+5.5V 所有输入电压…………………………………………………………GND-0.5V—VDD+0.5V 所有吸入输出电流………………………………………………………… IOL/8mA,IOH/5mA 工作温度…………………………………………………………………………………-40℃~85℃储存温度…………………………………………………………………………………-50℃~125℃(二)直流特性符号符号描述最小值典型值最大值单位条件V DD电源 4.55 5.5V正常工作环境下V IL 输入IO低电平00.3V TTL电平V IH 输入IO高电平35 5.5V TTL电平IOL低电平吸入电流58mA TTL电平IOH高电平输出电流35mA TTL电平Vjd模拟输入电平05V模拟输入电平范围Ijd模拟输入电流100nA模拟输入电流值五.引脚功能参数六.应用方案○a有霍尔直流无刷电机应用方案○b无霍尔直流无刷电机应用方案注:●Ha,Hb,Hc输入端,内有上拉电阻,约30KΩ左右●电流检测回路,一般应用Ri =10K,Ci = 104P,电流采样电阻R选值参考 R =0.05/( W/V) 式中:0.05常数,W 电机功率,V 工作电压如:工作电压12V,电机功率 30W R =0.02( 20mΩ)●在无霍尔驱动中,反电动势信号经过L339处理后的相位不能搞错(MA—Ha;MB—Hb;MC—Hc)●驱动门电路,建议使用IR2101S做为驱动门,起到隔离与电平转换作用●VCC电源滤波电容 C,一般按 C = W/V*100 式中:C 单位 uF W电机功率 V工作电压 100常数如:工作电压12V 电机功率 10W 实际C = 83uF 按照滤波电容的选型原则,向上选用标称值 为100uF电容。
带霍尔传感器的三相无刷直流电机控制
带霍尔传感器的三相无刷直流电机控制无刷直流电动机(BLDC),也称为电子换向电动机(ECM、EC 电动机)或同步直流电动机,是由直流电通过逆变器或开关电源供电的同步电动机,该同步电动机会产生交流电流来驱动各相通过闭环控制器控制电机。
控制器向控制电机速度和扭矩的电机绕组提供电流脉冲。
与有刷电机相比,无刷电机的优势在于高功率重量比、高速度和电子控制。
无刷电机在计算机外围设备(磁盘驱动器、打印机)、手持电动工具以及从模型飞机到汽车的车辆等地方都有应用。
该项目描述了如何使用GreenPAK? 控制三相无刷直流电机。
下面我们描述了了解解决方案如何编程以创建直流电机控制所需的步骤。
但是,如果您只是想得到编程的结果,XZGreenPAK Designer 软件查看已经完成的GreenPAK Design 文件。
将GreenPAK 开发套件插入您的计算机,然后点击程序来设计设备。
构造和运行原理BLDC 电机的结构和操作与交流感应电机和有刷直流电机非常相似。
与所有其他电机一样,BLDC 电机也由转子和定子组成(图1)。
BLDC 电机定子由叠层钢制成,用于承载绕组。
定子中的绕组可以按两种模式排列-星形图案(Y) 或三角形图案(Δ)。
两种模式之间的主要区别在于Y 模式在低RPM 时提供高扭矩,而? 模式在低RPM 时提供低扭矩。
这是因为在? 配置中,一半的电压施加在未驱动的绕组上,从而增加了损耗,进而增加了效率和扭矩。
BLDC 电机使用电气循环进行控制。
一个电循环有 6 个状态。
基于霍尔传感器的电机换向序列如图 2 所示。
BLDC 电机运行的基本原理与有刷直流电机相同。
对于有刷直流电机,反馈是使用机械换向器和电刷实现的。
在BLDC 电机中,使用多个反馈传感器实现反馈。
Z常用的传感器是霍尔传感器和光学编码器。
在三相BLDC 中,齿(极)数是3 的倍数,磁铁数是2 的倍数。
根据磁铁和齿的数量,每个电机具有不同数量的齿槽效应(即磁吸力)转子和定子)每转步数。
电动工具方案--A4915
电动工具方案--A4915
功能概述
本产品提供了基于A4915方案的应用电路实例,具备以下功能特点(DEMO板上默认有27V 稳压管、2A的防反接二极管以及2A的限流电阻,请根据实际需要更换这些元件):
● 单电源5~50VDC供电
● 三相霍尔IC输入
● 120度方波驱动
● 6片50V60A功率N-MOSFET,TO-252封装,可提供超过200W的功率输出
方案特点
A4915是用于三相永磁无刷直流电机的控制芯片,外接三路霍尔IC检测转子位置,6片
N-MOSFET全桥驱动电路,具备多种参数调节和控制功能
● 超低待机功耗
● 高效同步整流
● 三霍尔IC输入
● 模拟电压调速
● PWM占空比调速
● 正反转
● 刹车
● 故障信号输出
● 可调死区时间
● 欠压保护
● 短路保护
● 过热保护
详情请点击下载。
三相全波无刷直流电机及其驱动方法基础
三相全波无刷直流电机及其驱动方法基础下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!三相全波无刷直流电机及其驱动方法基础引言随着电动化技术的发展,无刷直流电机及其驱动方法在各种应用中扮演着越来越重要的角色。
三相无刷直流电机驱动原理

三相无刷直流电机驱动原理一、引言三相无刷直流电机是一种广泛应用于工业和家电领域的电机,其驱动原理是通过电子器件实现电机转子的控制和驱动。
本文将从三相无刷直流电机的基本结构、工作原理以及驱动器件的选择和控制方法等方面进行介绍。
二、三相无刷直流电机的基本结构三相无刷直流电机由转子、定子和传感器组成。
转子是由永磁体组成,定子则由三组线圈(A、B、C相)和磁铁组成。
传感器用于检测转子位置,通常采用霍尔元件或光电传感器。
三、三相无刷直流电机的工作原理三相无刷直流电机通过交替激励定子线圈,产生磁场,使转子转动。
其工作原理可以简单描述为以下几个步骤:1. 传感器检测转子位置:传感器会实时检测转子的位置,并将检测结果反馈给控制器。
2. 控制器计算相应的电流:根据传感器反馈的转子位置信息,控制器会计算出相应的电流值,并将电流信号发送给电机驱动器。
3. 电机驱动器控制电流:电机驱动器根据控制器发送的电流信号,控制电流的大小和方向,使电机产生适当的转矩。
4. 电机转子运动:根据电机驱动器控制的电流信号,电机转子会按照一定的顺序和速度进行旋转。
5. 重复上述步骤:电机会不断地重复执行上述步骤,以保持转子的稳定转动。
四、三相无刷直流电机驱动器件的选择选择适合的驱动器件对于三相无刷直流电机的正常运行至关重要。
常用的驱动器件包括功率MOSFET、IGBT和功率集成电路等。
1. 功率MOSFET:功率MOSFET具有开关速度快、损耗小等特点,适合用于中低功率的电机驱动。
2. IGBT:IGBT具有较高的工作电压和工作温度范围,适合用于高功率电机驱动。
3. 功率集成电路:功率集成电路集成了多种功能和保护电路,能够提供更全面的电机驱动控制。
五、三相无刷直流电机的控制方法三相无刷直流电机的控制方法主要有霍尔传感器反馈控制和电动势反馈控制。
1. 霍尔传感器反馈控制:通过采集霍尔传感器检测的转子位置信息,实时调整电机驱动器的输出电流,以控制电机转速和转向。
3A双向直流电机(马达)驱动芯片 RZ7889D

RZ7889D
电特性( 除特殊说明外:Vcc = 6V,Ta = 25℃ )
参数
符号
条件
工作电压 待机电流
VOPR Is
Vcc = 9V Vi = 0
静态电流
Icc
Vcc = 6V V1 = 3V
负载开路
输出高电平 输出低电平 输入高电平
VHOUT VLOUT ViH
Vcc = 6V Io =3A Vcc = 6V Io = 3A
马达驱动电路
RZ7889D
电路简述 RZ7889D 是一款 DC 双向马达驱动电路,它适用于玩具等类的电机驱动、
自动阀门电机驱动、电磁门锁驱动等。它有两个逻辑输入端子用来控制电机前进、 后退及制动。该电路具有良好的抗干扰性,微小的待机电流、低的输出内阻,同 时,他还具有内置二极管能释放感性负载的反向冲击电流。
输入低电平
ViL
输入电流(2V)
Ii
Vcc = 6V Vi = 2V
输入电流(3V)
Ii
Vcc = 6V Vi = 3V
输出电流
Iout
DIP8 封装, 5,6,7,8 脚外要布
散热铜片(PCB 板铜片)
过热保护温度
Totp
最小 3.0
2
5.5 0.05 2.2
典型 --
4
5.7 0.12 3.5 0.5 70 100 3
M
OUTR
78
GND
马达驱动电路
应用测试样板图
RZ7889D
马达驱动电路
封装外形图
Package Type DIP8
RZ7889D
特点
z 微小的待机电流,小于 2uA。 z 工作电压范围宽 3.0V~15V.. z 有紧急停止功能 z 有过热保护功能 z 有过流嵌流及短路保护功能 z 封装外形为: DIP8
三相无刷直流电机驱动电路

三相无刷直流电机驱动电路三相无刷直流电机驱动电路是一种常用于工业和家电领域的电机驱动方案。
相比传统的有刷直流电机,无刷直流电机具有更高的效率、更低的噪音和更长的使用寿命。
本文将介绍三相无刷直流电机驱动电路的原理、特点以及应用领域。
一、无刷直流电机的原理无刷直流电机是一种基于电子换向技术的电机,其工作原理类似于传统的有刷直流电机。
无刷直流电机由转子、定子和电子换向器三部分组成。
转子是由永磁体组成的,定子则是由多相绕组组成的。
电子换向器根据转子位置和速度信息,通过控制电流的方向和大小,实现电机的高效运转。
三相无刷直流电机驱动电路主要由功率电子器件、驱动电路和控制器三部分组成。
功率电子器件通常采用IGBT(绝缘栅双极型晶体管)或MOSFET(金属氧化物半导体场效应晶体管),用于控制电流的通断和方向。
驱动电路负责产生适当的驱动信号,将控制器输出的信号转化为功率电子器件所需的控制信号。
控制器是电机控制系统的核心,负责根据转子位置和速度信息,产生适当的控制信号,并将其送至驱动电路。
三、三相无刷直流电机驱动电路的特点1. 高效率:无刷直流电机由于无需通过电刷和换向器,减少了能量损耗,提高了电机的效率。
在工业和家电领域,高效率是提高设备性能的关键因素之一。
2. 低噪音:无刷直流电机在工作过程中,没有机械接触和摩擦,因此噪音较低。
这使得无刷直流电机在一些对噪音要求较高的场合得到了广泛应用,比如家电领域的洗衣机和吸尘器等。
3. 高可靠性:由于无刷直流电机没有电刷和换向器等易损件,因此具有更长的使用寿命和更高的可靠性。
这使得无刷直流电机在一些对设备寿命要求较高的场合得到了广泛应用,比如工业自动化领域的机床和机械手等。
4. 精确控制:由于控制器可以根据转子位置和速度信息进行精确控制,因此无刷直流电机具有较好的速度和转矩响应特性。
这使得无刷直流电机在一些对运动控制要求较高的场合得到了广泛应用,比如机器人、无人机和电动汽车等。
直流无刷电机PWM驱动芯片设计

方面伺服电动机占优,但在电机效率,速度,稳定性,最高转速方面两者相差不大。
最主要的是无刷电动机价格优势很大,要便宜1/3。 表1-1无刷直流电动机与异步电动机主要特性比较【2】
无刷直流电动机
异步电动机
转速范围Jr/mini 转速比
80.4000 1:50
200.2400 1:20
最大输入电流(惯性负载)
reliable operation.The motor with Hall position sensor is popular in the market.Tllis sensor is cheap but inaccurate in targeting location.In order to improve the control capacity of this
iIl 1 0V.-o.35岬BCD technology.
Keywords:motor driver IC:; BLDCM;MSL—PWM;PWM mode
量曼曼iI
西南交通大学硕士研究生学位论文
1
.--
第一章 绪论
I.I研究背景与意义
I第皇曼1曼页曼曼
节能减排是当下紧峻的问题,电机及其拖动系统是工业耗能设备中的主要环节,
1.2国内外研究现状分析
电机驱动的研究,调制方式最先是方波PWM调制,又从方波三三导通方式变化 到一般的正弦波PWM调制(SPWM),在到SPWM中加入不同谐波分量的调制,这引 入许多侧重点不同的正弦PWM调制,如马鞍波PWM调制,开关损耗最小(minimum switch losses)PWM调制(MSL.PWM),发展到现在常用的空间矢量调制(SV】?WM)。 正弦PWM调制是从电源的角度出发生成可调频调压的正弦波电源,而SVPWM则是 从磁链的角度,通过开关管的不同导通组合生成8个基本的空间电压矢量,利用电压 矢量形成实际磁链矢量,并追踪电动机定子的理想磁链圆轨迹。这两类调制之间存在 一定的联系和转换。相对来说,SVPWM更能降低电机转矩脉动,并提高直流母线电 压的利用率和易于数字处理。控制系统由最早的比例一积分一微分控制器(PD),到现在 智能控制系统,如神经网络,模糊控制【5~。对各种方式下的转矩波动都有学者进行了 深入的分析研究。
三相全波线性驱动电机驱动IC(LB11685AV)说明书

LB11685AVMonolithic Digital IC3‐phase Sensor Less Motor DriverOverviewThe LB11685A V is a three-phase full-wave current-linear-drive motor driver IC. It adopts a sensor less control system without the use of a Hall Effect device. For quieter operation, the LB11685A V features a current soft switching circuit and be optimal for driving the cooling fan motors used in refrigerators, etc.Functions•Three-phase Full-wave Linear Drive (Hall Sensor-less Method)•Built-in Current Limiter Circuit•Built-in Three-phase Output V oltage Control Circuit•Built-in Motor Lock Protection Circuit•Motor Lock Protection Detection Output•FG Output Made by Back EMF•Built-in Thermal Shut Down Circuit•Beat Lock Prevention CircuitSpecificationsMAXIMUM RATINGS (T A = 25°C)Parameter Symbol Conditions Ratings Unit Maximum SupplyVoltageV CC max19V Input AppliedVoltageV IN max−0.3 to V CC + 0.3VMaximum Output Current I O max(Note1)1.2AAllowable Power Dissipation P d max Mounted ona board (Note2)1.05WOperatingTemperatureT opr−40 to +85°CStorageTemperatureT stg−55 to +150°CJunctionTemperatureT j max150°CStresses exceeding those listed in the Maximum Ratings table may damage the device. If any of these limits are exceeded, device functionality should not be assumed, damage may occur and reliability may be affected.1.The I O is a peak value of motor-current.2.Specified board: 76.1mm × 114.3mm × 1.6mm, glass epoxy board. CAUTION:Absolute maximum ratings represent the value which cannot be exceeded for any length of time.CAUTION:Even when the device is used within the range of absolutemaximum ratings, as a result of continuous usage under hightemperature, high current, high voltage, or drastic temperaturechange, the reliability of the IC may be degraded. Pleasecontact us for the further details.SSOP24JCASE 565ASSee detailed ordering and shipping information on page7 of this data sheet.ORDERING INFORMATIONXXXXX = Specific Device CodeY = YearM = MonthDDD = Additional Traceability DataXXXXXXXXXXYMDDDMARKING DIAGRAMPIN ASSIGNMENT24VOUT UOUT123WOUT (NC)222(NC) (NC)321(NC) PGND420RF MCOM519V CC (NC)618REG SGND717VOH FG816FC1RD915FC2 (NC)1014C2 V CO1113C1CX12RECOMMENDED OPERATING CONDITIONS (T A = 25°C)Symbol Parameter Conditions Ratings Unit V CC Recommended Supply Voltage12.0V V CC op Operating Supply Voltage 4.5 to 18.0V Functional operation above the stresses listed in the Recommended Operating Ranges is not implied. Extended exposure to stresses beyond the Recommended Operating Ranges limits may affect device reliability.ELECTRICAL CHARACTERISTICS (T C = 25°C unless otherwise noted)Symbol Parameter Conditions Min Typ Max UnitI CC Supply Current FC1 = FC2 = 0V51020mAVREG Internal Regulate Voltage 3.0 3.3 3.6V VOSOUR Output Voltage (Source)I O = 0.8A (Note5) 1.3 1.7V VOSINK Output Voltage (Sink)I O = 0.8A (Note5)0.5 1.3V VOLIM Current Limiter0.2680.3000.332V VINCOM MCOM PinCommon-input Voltage Range0V CC − 2VICOM+MCOM PinSource Current for HysteresisMCOM = 7V3080m AICOM−MCOM PinSink Current for HysteresisMCOM = 7V3080m ARTCOM MCOM PinHysteresis Current RatioRTCOM = ICOM+ / ICOM−0.6 1.4I VCO VCO Input Bias Current V CO = 2.3V0.2m Af VCO min VCO Oscillation Minimum Frequency V CO = 2.1V, CX = 0.015m FDesign target (Note4)930Hzf VCO max VCO Oscillation Maximum Frequency V CO = 2.7V, CX = 0.015m FDesign target (Note4)8.6kHzI CX CX Charge/Discharge Current V CO = 2.5V, CX = 1.6V70100140m AD VCX CX Hysteresis Voltage0.350.550.75IC1(2)+C1 (C2) Charge Current V CO = 2.5V, C1(2) = 1.3V122028m A IC1(2)−C1 (C2) Discharge Current V CO = 2.5V, C1(2) = 1.3V122028m A RTC1(2)C1 (C2) Charge/Discharge Current Ratio RTC1(2) = IC1(2)+ / IC1(2)−0.8 1.0 1.2RTCCHG C1/C2 Charge Current Ratio RTCCHG = IC1+ / IC2+0.8 1.0 1.2RTCDIS C1/C2 Discharge Current Ratio RTCDIS = IC1− / IC2−0.8 1.0 1.2VCW1(2)C1 (C2) Cramp Voltage Width 1.0 1.3 1.6V VFGL FG Output Low Level Voltage IFG = 3mA0.5V VRDL RD Output Low Level Voltage IRD = 3mA0.5VTTSD Thermal Shut Down Operating Temperature (Note3)Junction temperatureDesign target (Note4)150180°CD TTSD Thermal Shut Down Hysteresis Temperature(Note3)Junction temperatureDesign target (Note4)15°CProduct parametric performance is indicated in the Electrical Characteristics for the listed test conditions, unless otherwise noted. Product performance may not be indicated by the Electrical Characteristics if operated under different conditions.3.The thermal shut down circuit is built-in for protection from damage of IC. But its operation is out of T opr. Design thermal calculation at normaloperation.4.Design target value and no measurement is made.5.The I O is a peak value of motor-current.Figure 1. P d max − T A00.51.01.5−40−20020406080100Ambient Temperature, T A (5C)A l l o w a b l e P o w e r D i s s i p a t i o n ,P d m a x (W )BLOCK DIAGRAMFigure 2. Block DiagramPIN FUNCTION PIN FUNCTIONPIN FUNCTION (continued)APPLICATION CIRCUIT EXAMPLE * Each fixed number in the following Figure3, is the referential value.Figure 3. Application Circuit Example 1 m F V CCORDERING INFORMATIONDevice Package Wire Bond Shipping† (Qty / Packing) LB11685AV−TLM−H SSOP24J (275mil)(Pb-Free / Halogen Free)Au-wire2000 / Tape & ReelLB11685AV−W−AH SSOP24J (275mil)(Pb-Free / Halogen Free)Cu-wire2000 / Tape & Reel†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.DATE 31 OCT 2013NOTE:The measurements are not to guarantee but for reference only.*For additional information on our Pb −Free strategy and soldering details, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.XXXXX = Specific Device Code Y = Year M = MonthDDD = Additional Traceability Data GENERICMARKING DIAGRAM**This information is generic. Please refer to device data sheet for actual part marking.Pb −Free indicator, “G” or microdot “ G ”,may or may not be present.XXXXXXXXXX YMDDDMECHANICAL CASE OUTLINEPACKAGE DIMENSIONSON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.ON Semiconductor reserves the right to make changes without further notice to any products herein. ON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. ON Semiconductor does not convey any license under its patent rights nor theON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.ON Semiconductor owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of ON Semiconductor’s product/patent coverage may be accessed at ON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.PUBLICATION ORDERING INFORMATIONTECHNICAL SUPPORTNorth American Technical Support:Voice Mail: 1 800−282−9855 Toll Free USA/Canada Phone: 011 421 33 790 2910LITERATURE FULFILLMENT :Email Requests to:*******************ON Semiconductor Website: Europe, Middle East and Africa Technical Support:Phone: 00421 33 790 2910For additional information, please contact your local Sales RepresentativeMouser ElectronicsAuthorized DistributorClick to View Pricing, Inventory, Delivery & Lifecycle Information:O N Semiconductor:LB11685AV-TLM-H LB11685AV-MPB-H LB11685AV-W-AH。
直流无刷电机驱动器的接线规则
直流无刷电机驱动器的接线规则
直流无刷电机驱动器是一种用于控制直流无刷电机运转的设备。
它的接线规则非常关键,直接影响到电机的性能和稳定性。
以下是关于直流无刷电机驱动器的接线规则的一些重要事项。
1. 电源接线:直流无刷电机驱动器通常需要接入外部电源。
在接线时,需要确保电源的电压和电流能够满足电机和驱动器的要求。
一般情况下,电源的正极连接到驱动器的正极,负极连接到驱动器的负极。
2. 电机接线:直流无刷电机通常有三个线圈,分别为A、B、C相。
在接线时,需要将驱动器的A、B、C相输出分别连接到电机的A、
B、C相线圈上。
确保连接正确,以免影响电机的正常运转。
3. 编码器接线:有些直流无刷电机驱动器还配有编码器,用于提供反馈信号。
在接线时,需要将编码器的信号线连接到驱动器上相应的接口上。
这样可以实现对电机位置和速度的闭环控制。
4. 控制信号接线:直流无刷电机驱动器通常需要接收控制信号来控制电机的运转。
常见的控制信号有脉宽调制信号(PWM)和方向控制信号。
在接线时,需要将控制信号线连接到驱动器上相应的接口上。
5. 地线接线:为了保证系统的安全性和稳定性,需要将驱动器的地线连接到电源的地线上。
这样可以有效消除干扰和保护系统。
直流无刷电机驱动器的接线规则是确保各个信号线连接正确,并遵循电机和驱动器的要求。
正确的接线可以确保电机的正常运转和系统的稳定性。
在进行接线时,需要仔细阅读电机和驱动器的说明书,并遵循相应的接线规则。
这样可以保证系统的可靠性和性能。
三相无刷电机驱动器工作原理解析
三相无刷电机驱动器工作原理解析【文章主题:三相无刷电机驱动器工作原理解析】一、引言三相无刷电机驱动器是一种常用的电机驱动器,被广泛应用于各行各业。
了解其工作原理对于我们理解电机驱动技术的发展和应用具有重要意义。
本文将对三相无刷电机驱动器的工作原理进行深入解析,旨在帮助读者对该技术有更全面、深入的理解。
二、基本原理1. 无刷电机概述无刷电机是相对于传统的有刷电机而言的,其最大的特点是不需要刷子和整流器来实现转子的换向。
三相无刷电机由定子和转子组成,定子上的三个线圈按一定的间隔排列,转子上则包含多个磁极。
通过改变电流的方向和大小,可以使得转子在定子线圈的作用下转动,实现驱动效果。
2. 三相无刷电机驱动器组成三相无刷电机驱动器主要由功率电子器件、驱动电路和控制算法组成。
功率电子器件主要包括MOSFET、IGBT等,负责将输入的直流电压转换为三相交流电压;驱动电路用于控制功率电子器件的开关,使其按照预定的规律切换;控制算法则决定驱动器的工作模式和反馈控制策略。
三、工作原理解析1. 直流电压输入三相无刷电机驱动器通常采用直流电源作为输入源,输入电压经过滤波和变压等处理后,供给给驱动器使用。
通过控制输入电压的大小和方向,可以实现电机的转速控制和转向控制。
2. 电机的启动当电机刚开始运行时,需要通过特定的启动算法来使其转动。
常见的启动方法包括霍尔传感器启动和传感器空转启动。
霍尔传感器启动是通过检测转子位置来确定通电顺序,保证定子线圈与转子磁极之间始终保持一定的空间关系。
而传感器空转启动则是根据一定的规则和电机特性进行启动,提供适当的电流和占空比控制来实现。
3. 相依转子位置的换相在电机运行过程中,为了保证定子线圈与转子磁极之间的空间关系始终保持一致,需要根据转子位置来进行换相。
换相是通过控制驱动器中的功率开关,使相应的线圈通电,产生磁场与转子磁极相互作用,从而实现转子的持续转动。
4. 电机速度及转矩控制三相无刷电机驱动器可以通过改变驱动电流的大小和频率来实现对电机速度和转矩的控制。
常用无刷电机驱动芯片
常用无刷电机驱动芯片无刷电机驱动芯片是一种控制无刷电机运转的电子元件,具有体积小、功耗低、效率高等优点,在很多领域得到广泛应用。
下面介绍一些常用的无刷电机驱动芯片。
1. DRV8301:DRV8301是Texas Instruments(德州仪器)公司推出的一款常用的无刷电机驱动芯片,适用于功率较小的无刷直流电机驱动。
该芯片采用封装形式较小的QFP封装,具有集成化程度高、性能稳定等特点,能够提供高电流输出和多种保护功能,广泛应用于工业自动化、电动工具、电动车等领域。
2. L6234:L6234是STMicroelectronics(意法半导体)公司推出的一款无刷电机驱动芯片,采用封装形式较小的SOIC封装。
该芯片采用了独特的电流控制技术,具有工作稳定、抗干扰能力强等特点,适用于中小功率的无刷电机驱动。
3. MC33035:MC33035是ON Semiconductor(安森美半导体)公司推出的一款无刷电机驱动芯片,采用封装形式较小的PDIP封装。
该芯片具有内置了多种保护功能,包括过压、过流、过热等保护,可广泛应用于家用电器、电动工具、电动车等电机驱动领域。
4. LB1938FA:LB1938FA是SANYO(三洋)公司推出的一款无刷电机驱动芯片,采用封装形式较小的SOP封装。
该芯片具有集成化程度高、工作稳定等特点,适用于小功率的无刷电机驱动。
5. A4950:A4950是Allegro MicroSystems公司推出的一款无刷电机驱动芯片,采用封装形式较小的SOIC封装。
该芯片具有高电流输出能力、低功耗等特点,适用于高功率无刷电机驱动,广泛应用于电动工具、机器人、电动车等领域。
综上所述,无刷电机驱动芯片是控制无刷电机运转的电子元件,常用的无刷电机驱动芯片有DRV8301、L6234、MC33035、LB1938FA和A4950等。
这些芯片具有集成化程度高、性能稳定、功耗低、效率高等特点,适用于不同功率范围的无刷电机驱动需求,被广泛应用于工业自动化、家电、电动工具、电动车等领域。
三相无刷电机驱动器原理
三相无刷电机驱动器原理
三相无刷电机驱动器是一种常见的电机控制器,它可以控制步进电机或直流电机的速度和方向。
无刷电机驱动器主要由三个模块组成:功率模块、控制模块和传感器模块。
功率模块:功率模块是无刷电机驱动器的核心部分,它主要由电源、MOS管驱动电路和三相电机组成。
无刷电机驱动器使用MOS管控制三相电机的通断,从而实现电机的速度和方向的控制。
控制模块:控制模块主要用于控制电机的转速和方向,它主要包括信号处理器、比较器、逆变器等部分。
信号处理器将输入的指令转换为电机控制信号,比较器将电机输出的实际速度与设定速度进行比较,逆变器改变输入信号的频率和幅度,从而实现电机的速度调节。
传感器模块:传感器模块主要用于检测电机的转速和位置,它主要由霍尔元件和磁铁组成。
霍尔元件可以检测电机的磁场变化,从而确定电机转速和位置。
磁铁则用于产生磁场,供霍尔元件检测。
无刷电机驱动器的控制原理是:首先,控制模块将输入的指令转换为电机控制信号,然后传感器模块检测电机的转速和位置,将结果反馈给控制模块。
接着,控制模块将反馈信息与设定值进行比较,调整逆
变器的输出信号的频率和幅度,改变MOS管的通断状态,从而控制电机的速度和方向。
无刷电机驱动器具有响应速度快、控制精度高、效率高等优点,被广泛应用于工业自动化、家用电器等领域。
未来,随着新材料和技术的发展,无刷电机驱动器的性能和应用范围将得到进一步提升。
三相无刷直流电机原理和控制方法
主要内容一、几个术语解释(极对数、相数、电角度、电角频率、相电压、线电压、反电动势)二、无刷直流电机的运行原理(运行原理、数学模型)三、无刷直流电机的基本控制方法(各参数相互关系、换流过程与换流模式)四、车用无刷直流电机及其控制系统(基本控制、弱磁控制)•极对数():电机转子中N-S 极的对数,2,3,4,……•相数():电机绕组个数,3,6,12,……•电角度()/机械角度():•电角频率()/机械角频率():•电角频率与电机转速():•极(2p )槽(Z )配合:Z/2p•相电压:电机相绕组对电机中性点电压•线电压:电机两相绕组之间电压•反电动势:电机到拖时某一转速下对应电机线电压峰值e θΩe ωθp 2m n θθ⋅=p e Ω⋅=p eωp n e ω60=⎰=dt e e ωθ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙dU 1T 5T 3T 4T 6T 2T 1D 3D 5D 4D 6D 2D oa i bi c i ae be ce d C A BC无刷直流电机的组成♦无刷直流电机组成部分:电机本体、位置传感器、电子开关线路;♦电机本体在结构上与永磁同步电动机相似;♦电子开关线路由功率逻辑开关单元和位置传感器信号处理单元两部分组成;♦电子开关线路导通次序是与转子转角同步的,起机械换向器的换向作用。
+-ABCA ’B ’C ’1V 2V 3V 位置传感器无刷直流电机电子开关线路120度导通时转子位置与电流换相关系a) 0度(换相前)b) 0度(换相后)c) 60度(换相前)d) 60度(换相后)e) 120度(换相前)f) 120度(换相后)A'A B'BC'CC'B'A A B'CC'BA 'A B'C'A CB 'B'C A 'A C 'BB'C A 'A C'BA 'C Ba)b)c)d)e)f)rωrωrωrωrωrωsθsθo60o 60o 120o120HALL 状态与PWM 、三相反电势和三相相电流的对应关系a PWM bPWM cPWM aHall b Hall cHall tωt ωtω61T T 23T T 43T T 45T T 65T T 21T T 61T T a i b i ci tωt ωtω61T T 23T T 43T T 45T T 65T T 21T T 61T T a e be ce tωt ωtω101100110010011001101120无刷直流电机的电流和感应电动势具有以下特点:(1)感应电动势为三相对称的梯形波,其波顶宽为(2)电流为三相对称的方波;(3)梯形波反电势与方波电流在相位上严格同步。
三相无刷直流电机驱动电路

三相无刷直流电机驱动电路三相无刷直流电机驱动电路是一种常见的电机控制方式,它通过无刷直流电机控制器将三相交流电转换为直流电,从而驱动电机运行。
本文将介绍三相无刷直流电机驱动电路的原理和应用。
一、三相无刷直流电机驱动电路的原理三相无刷直流电机驱动电路主要包括功率电源、直流电机、无刷直流电机控制器和速度反馈装置等组成部分。
1. 功率电源:提供电机运行所需的电能,一般为交流电源。
2. 直流电机:三相无刷直流电机是一种特殊的电机类型,具有高效率、大功率密度和长寿命等优点,广泛应用于工业自动化领域。
3. 无刷直流电机控制器:是三相无刷直流电机驱动电路的核心部件,主要负责将交流电转换为直流电,并通过控制电流和电压的方式,实现电机的转速和转向控制。
4. 速度反馈装置:用于检测电机的转速和位置信息,并将反馈信号传输给无刷直流电机控制器,以实现闭环控制,提高电机的稳定性和精度。
三相无刷直流电机驱动电路的工作原理可以分为两个阶段:换向和电流控制。
1. 换向:在电机正常运行过程中,电机转子的位置需要根据三相交流电的信号进行换向。
无刷直流电机控制器通过检测转子位置信息,控制相应的功率晶体管开关,从而实现换向操作。
2. 电流控制:在换向之后,无刷直流电机控制器根据转子位置信息,通过PWM(脉宽调制)技术控制电流大小和方向,从而控制电机的转速和转向。
三、三相无刷直流电机驱动电路的应用三相无刷直流电机驱动电路具有广泛的应用前景,在许多领域都有着重要的作用。
1. 工业自动化:三相无刷直流电机驱动电路广泛应用于工业自动化生产线中,用于控制机械臂、输送带、风机等设备的运动。
2. 电动车辆:三相无刷直流电机驱动电路也被广泛应用于电动车辆中,用于控制车辆的动力系统,实现高效、环保的交通方式。
3. 家电产品:三相无刷直流电机驱动电路还可以应用于家电产品中,如洗衣机、冰箱、空调等,提高产品的性能和使用寿命。
4. 机器人技术:随着机器人技术的发展,三相无刷直流电机驱动电路也被广泛应用于机器人的关节驱动系统,实现机器人的灵活运动和高精度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相无感无刷直流电动机驱动器IC A
Allegro MicroSystems公司推出一款新型三相无感无刷直流电动机驱动器IC,以丰富其现有的无刷直流设备系列。
Allegro的新产品A4941可提供无感换相,具备较宽的电源电压范围,峰值输出电流为1.25 A,工作温度范围为-40°C至105°C,拥有带自动重启功能的锁检测,并采用旨在减少可闻噪声、带软开关的小型eTSSOP 封装。
这款新产品主要针对消费类大型家用电器和办公自动化市场,主要应用为冰箱和空气净化器的风扇应用。
电动机驱动器系统由3个半桥式NMOS输出、BEMF传感电路、自适应换相控制和状态定序器组成。
定序器决定哪个输出设备处于激活状态。
BEMF传感电路和自适应换相电路决定定序器何时进入下个状态。
3个半桥式输出由状态机控制,有6种可能的状态。
电动机BEMF在三态输出条件下进行状态感应。
BEMF传感电动机换相基于三态输出电压与电动机中心抽头电压的精确比较进行。
BEMF零交叉- 三态电动机绕组电压与中心抽头电压的交叉点- 可作为位置参考。
零交叉大致出现在一轮换相的中间时段。
启动时,由机载振荡器提供换相,以步进电动机,产生BEMF。
检测到合理BEMF 零交叉时,即已实现正常BEMF 感应换相。