直流伺服电机控制实验指导书
“直流伺服电机的建模与性能分析” 实验指导书 - 开放型实验管理系统

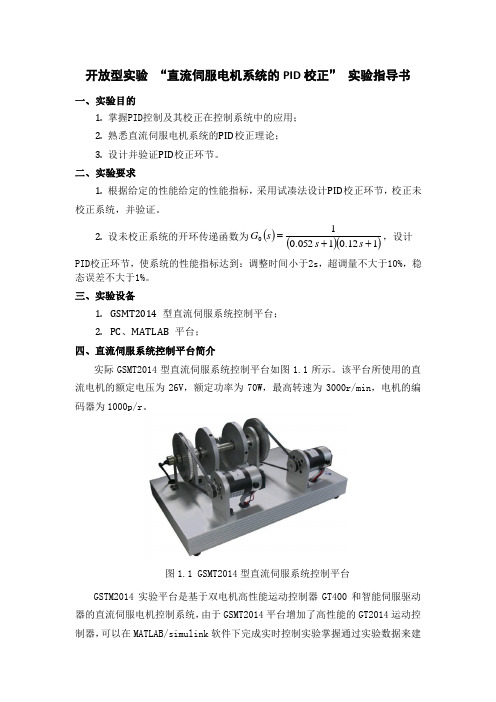
开放型实验“直流伺服电机的建模与性能分析”实验指导书一、实验目的1. 了解机理法、实验法建模的基本步骤;2. 会用实验法建立直流伺服电机的数学模型;3. 掌握控制系统稳定性分析的基本方法;二、实验要求1. 采用实验法建立直流伺服电机的数学模型;2. 分析直流伺服电机的稳定性,并在MATLAB 中仿真验证;三、实验设备1. GSMT2014 型直流伺服系统控制平台;2. PC、MATLAB 平台;四、直流伺服系统控制平台简介实际GSMT2014型直流伺服系统控制平台如图1.1所示。
该平台所使用的直流电机的额定电压为26V,额定功率为70W,最高转速为3000r/min,电机的编码器为1000p/r。
图1.1 GSMT2014型直流伺服系统控制平台GSTM2014实验平台是基于双电机高性能运动控制器GT400和智能伺服驱动器的直流伺服电机控制系统,由于GSMT2014平台增加了高性能的GT2014运动控制器,可以在MATLAB/simulink软件下完成实时控制实验掌握通过实验数据来建立系统的数学模型的实验方法,以及现代控制理论的状态反馈法。
五、实验原理系统的建模方法主要分为机理法和实验法。
1.机理法建立直流伺服电机数学模型采用机理法建立系统模型,需要深入理解系统内部的各个部分之间的关系,可以通过简化模型原理图得出,直流伺服电机的简化模型原理图如图1.2所示。
图1.2 直流电机的等效电路a U ——定义为电枢电压(伏特)b U ——定义为反电动势(伏特)a I ——定义为电枢电流(安倍)a R ——定义为电枢电阻(欧姆)a L ——定义为电枢电感(亨利)m T ——定义为电机产生的转矩(牛顿·米)c T ——定义为系统的干扰力矩(牛顿·米)m J ——定义为负载的等效转动惯量(千克·米²)结合直流伺服机的等效电路模型可以得出:(1)电枢电压方程: dt t di La t i a a )()(R t U -t U a b a +=)()((1-1) (2)电动机的转矩:a m kI T =(1-2) 式中:k ——电动机的转矩常数(3)电动机的反电动势:n b w K =b U(1-3) 式中:b K ——反电动势常数(4)转矩平衡方程: c m T dt d J +=22m T θ(1-4)当改变电动机的电枢电压时,根据(1-1)、(1-2)、(1-3)、(1-4)式可以得出直流电动机的动态微分方程为: c f a c e T K U K t n dtt dn dt t n d -=++)()()(m 22m τττ (1-5) 其中:ετ——电磁时间常数; f K ——机械特性斜率;m τ——机械时间常数; c K ——转速常数;)(t n ——电机转速。
DJSY1直流电动机实验指导书.docx
实验一直流电机实验一、实验冃的1、学习电机实验的基本要求与安全操作注意事项。
2、认识在直流电机实验屮所用的电机、仪表、变阻器等组件及使用方法。
3、熟悉他励电动机(即并励电动机按他励方式)的接线、起动、改变电机转向与调速的方法。
二、预习要点1、如何止确选择使用仪器仪表。
特別是电压表电流表的量程。
2、直流电动机起动时,为什么在屯枢回路中需耍串接起动变阻器?不串接会产生什么严重后果?3、直流电动机起动时,励磁冋路串接的变阻器应调至什么位置?为什么?若励磁冋路断开造成失磁吋,会产生什么严重后果?4、直流电动机调速及改变转向的方法。
三、实验项目1、了解DD01电源控制屏中的电枢电源、励磁电源、宜流电机、变阻器、多量程直流电压表、电流表及直流电动机的使用方法。
2、用伏安法测直流电动机和直流发电机的电枢绕组的冷态电阻。
3、直流他励电动机的起动、调速及改变转向。
四、实验设备1、实验设备2、控制屏上挂件排列顺序:D31、D42、D4k D5R D31、D44(为便于接线)五、实验内容1、 熟悉实验装置根据实验指导老师的介绍,熟悉所用电机及电气技术实验装置各面板布置及使用方法, 掌握电机实验的基本方法,掌握安全操作和注意事项。
2、 直流仪表、转速表和变阻器的选择直流仪表、转速表量程是根据电机的额定值和实验屮可能达到的最大值来选择,变阻器 根据实验要求来选用,并按电流的大小选择串联、并联或串并联的接法。
(1)电压量程的选择电压表的量程应大丁•被测电路电压的最大值。
如测量电动机两端为220V 的直流电压,选用直 流电压表为1000V 量程档。
(2)电流量程的选择因为直流电动机的电枢电流较大,因此应选用较大 量程的表。
盲流并励电动机的电枢电额定电流为1.2A, 测量电枢电流的电表A?可选用有5A 量程档的直流电流 表,同样测功机的电枢回路电流表凡也选用有5A 量程 档的直流电流表;额定励磁电流小于0.16A,电流表Ai 选用200mA 量程档。
直流伺服电机实验报告材料

实验六 直流伺服电机实验一、实验设备及仪器 被测电机铭牌参数:P N =185W ,U N =220V ,I N =1.1A , 使用设备规格(编号):1.MEL 系列电机系统教学实验台主控制屏(MEL-I 、MEL-IIA 、B ); 2.电机导轨及测功机、转速转矩测量(MEL-13); 3.直流并励电动机M03(作直流伺服电机);4.220V 直流可调稳压电源(位于实验台主控制屏的下部); 5.三相可调电阻900Ω(MEL-03); 6.三相可调电阻90Ω(MEL-04);7.直流电压、毫安、安培表(MEL-06);二、实验目的1.通过实验测出直流伺服电动机的参数r a 、e κ、T κ。
2.掌握直流伺服电动机的机械特性和调节特性的测量方法。
三、实验项目1.用伏安法测出直流伺服电动机的电枢绕组电阻r a 。
2.保持U f=U fN=220V,分别测取U a =220V及U a=110V的机械特性n=f(T)。
3.保持U f=U fN=220V,分别测取T2=0.8N.m及T2=0的调节特性n=f(Ua)。
4.测直流伺服电动机的机电时间常数。
四、实验说明及操作步骤1.用伏安法测电枢的直流电阻Ra取三次测量的平均值作为实际冷态电阻值Ra=3132a a a R R R ++。
表中Ra=(R a1+R a2+R a3)/3; R aref =Ra*a ref θ++235235(3)计算基准工作温度时的电枢电阻由实验测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温。
按下式换算到基准工作温度时的电枢绕组电阻值:R aref =Raaref θθ++235235式中R aref ——换算到基准工作温度时电枢绕组电阻。
(Ω) R a ——电枢绕组的实际冷态电阻。
(Ω)θref ——基准工作温度,对于E 级绝缘为75℃。
θa ——实际冷态时电枢绕组的温度。
(℃)2.测直流伺服电动机的机械特性I S:电流源,位于MEL-13,由“转矩设定”电位器进行调节。
直流伺服电机实验报告_3

直流电机的特性测试一、实验要求在实验台上测试直流电机机械特性、工作特性、调速特性(空载)和动态特性, 其中测试机械特性时分别测试电压、电流、转速和扭矩四个参数, 根据测试结果拟合转速—转矩特性(机械特性), 并以X轴为电流, 拟合电流—电压特性、电流—转速特性、电流—转矩特性, 绘制电机输入功率、输出功率和效率曲线, 即绘制电机综合特性曲线。
然后在空载情况下测试电机的调速特性, 即最低稳定转速和额定电压下的最高转速, 即调速特性;最后测试不同负载和不同转速阶跃下电机的动态特性。
二、实验原理图三、实验操作步骤1.测量直流电机的机械特性和动态特性①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压和电枢电流信号引出, 分别接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定每个通道的测量范围。
②系统上电。
③用计算机给定电机的电枢电压信号, 逐渐增加负载(顺时针转动负载旋钮), 选择记录下此过程中的20组数据, 每组数据包括测量电枢电压、测量电枢电流、电机转速和电磁转矩值。
④计算机停止给定电机的电枢电压信号, 系统电源关闭。
2.测量直流电机的调速特性本实验要求测量的是空载下的调速特性, 测量额定电压下的最高转速和最低稳定转速。
步骤如下:①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压信号引出, 接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定通道的测量范围。
②利用式(1-7)计算电机额定电压(3V)对应的测量电压值, 为5.16V。
电机实际电压=(前面板测量电压-0.76)*2.75-0.1③系统上电。
④不断改变计算机输出的电机电压信号, 直至测量电压信号的值为5.16V。
记录下此时的转速值, 即为额定电压下的最高稳定转速。
⑤不断减小计算机输出地电机电压信号, 观察转速逐渐减小和稳定的情况, 记录下最低稳定转速值。
直流电机伺服系统实验报告
直流电机伺服系统实验报告目录直流电机伺服系统实验报告 (1)实验一、MATLAB仿真实验 (2)1.直流电机的阶跃响应 (2)2.直流电机的速度闭环控制 (2)3.直流电机的位置闭环控制 (7)实验二、直流电机调速系统 (11)1.反馈增益调节 (12)2.抗扰动能力对比 (12)3.比例调节下的特性测试与控制参数优化 (13)4.比例积分调节下的特性测试与控制参数优化 (15)5.测试速度环的速度误差系数(选做) (18)6.思考题 (19)实验三、直流电机位置伺服系统 (20)1.测试位置环的速度误差系数 (20)2.位置环采用比例控制器时的特性 (20)3.位置环采用PI 控制器时的动态特性 (23)4.测试工作台位移与输入电压的静特性 (24)5.思考题 (24)实验总结 (27)实验一、 MATLAB 仿真实验1.直流电机的阶跃响应如下图,对直流电机输入一个阶跃信号,画出阶跃响应曲线,指出主导极点。
利用Simulink 仿真搭建模型:实验结果 阶跃响应曲线两个极点是1210,10000s s =-=-,其中主导极点是110s =-。
2. 直流电机的速度闭环控制如下图,用测速发电机检测直流电机转速,用控制器Gc(s)控制加到电机电枢上的电压。
(1)假设()100c G s =,用Matlab 画出控制系统开环Bode 图,计算增益剪切频率、相位裕量、相位剪切频率、增益裕量:当()100c G s =时,改为单位负反馈,开环传递函数:100()(0.11)(0.0011)(0.00011)G s s s s =+++绘制系统开环Bode 图:利用margin 函数,得到:增益剪切频率784.3434/c rad s ω=,相位裕量48.1370γ=,相位剪切频率3179.7/rad s πω-=,增益裕量11.1214g K =。
(2)通过分析Bode 图,选择合适的常数P K 作为()c G s ,使闭环阶跃响应的最大超调量在0~5%之间:超调量(%)100(1sin )5p M γ≈--,降低最大超调量需要适当提高相位裕量γ,反解得到γ的取值为:64.2°<γ<71.8°这就需要减小p K (但是快速性将降低,稳态误差将增大)。
直流伺服调速系统实验报告
师范学院实验报告学院:专业:班级:成绩:姓名:学号:组别:组员:实验地点:实验日期:指导教师签名:实验(1)项目名称:直流电机智能伺服控制器基本控制实验1.实验项目名称直流电机智能伺服控制器基本控制实验2.实验目的和要求熟悉智能伺服运动控制器的原理和使用方法,掌握基本的电机控制原理,电流环,速度环和位置环的参数调节3.实验原理伺服系统在机电设备中具有重要的地位,高性能的伺服系统可以提供灵活、方便、准确、快速的驱动。
随着技术的进步和整个工业的不断发展,伺服驱动技术也取得了极大的进步,伺服系统已进入全数字化的时代。
智能伺服运动控制器的总体结构如下图所示;Motion Studio是智能伺服控制器的开发环境,是一款基于Windows环境的高性能可视化软件,用于开发包含有Technosoft智能伺服驱动的运动解决方案,它容许您配置一个运动系统,包括运动系统元素定义和控制器参数测定,利用高级集成工具设计运动程序,它可以自动生成TML代码,深层代码开发工具容许进一步的编辑和直接编译、连接、产生执行代码并送到IPM驱动器,最后,先进的图形显示工具:如数据记录、控制按钮和TML变量观测可用于系统的运动。
其界面如下图所示:根据电机参数,在下图所示的界面中设置参数:设置电流环,速度环和位置环各参数:在设置速度环和位置环参数后,对系统进行“Tune&Test”实验,改变参数,直到可以达到满意的控制效果。
4.主要仪器设备直流伺服系统控制平台、控制计算机5.实验内容及步骤(1)参照智能伺服控制器用户手册,熟悉其结构和原理(2)掌握智能伺服控制器和计算机通讯的原理和方法,掌握编码器信号采集,电位器信号采集和电机控制的基本方法。
(3)熟悉Motion Studio的使用。
6.实验数据记录和处理(1)测试出的电机电压值是多少?(2)测试出电机和负载总的转动惯量是多少?7. 问题与讨论(1)电机的转动方向是通过测试什么信号得到的?(2)测试电机的速度环时显示的波形是什么曲线?请简单画出波形图。
项目二 直流伺服电机控制实验
《电力拖动与电力系统创新实验》
电机专业方向创新实验
实验报告
电气工程及其自动化实验中心
实验项目:项目二 直流伺服电机控制实验
姓名:吴朋
学号:1120610812
时间:2015.10.14
成绩:
项目二 直流伺服电机控制实验
一、实验目的
1、掌握直流伺服电机开环回路的电压控制原理,测试响应波形,用比较近似方法确定开环特性参数。
2、掌握直流伺服电机闭环回路的速度和位置控制原理,测试响应波形,用比较近似方法确定闭环特性参数。
3、掌握直流伺服电机加减速、正弦波和可编程波的位置控制原理,测试响应波形,用比较近似方法确定闭环特性参数。
二、实验项目
1、开环回路的电压控制
2、闭环回路的速度控制
3、闭环回路的位置控制
4、加减速的位置控制
5、正弦波的位置控制
6、可编程波的位置控制
三、实验内容
1、开环回路的电压控制
Kamp加倍,速度57,加倍
频率加倍,转停转停频率加倍
负载率增大“转停”的“转”的时间比例变大2、闭环回路的速度控制
4、加减速的位置控制
6、可编程波的位置控制
四、实验心得
本实验了解了直流伺服电机的控制种类及基本方法,但是对于理论知识认识并不是非常深刻,需要在课后时间自学相关知识,才能更好的掌握。
控制电机实验指导书(1)
控制电机实验指导书目录一、概述 (3)二、实验地点 (3)三、实验项目 (3)实验一直流无刷电机实验 (4)实验二直线电机实验 (7)实验三(一)力矩式自整角机实验 (10)实验三(二)控制式自整角机参数的测定 (12)实验五正余弦旋转变压器实验 (15)三、教学参考书 (19)一、概述本课程是自动化等相关专业的专业选修课。
通过本课程的学习,使学生掌握各种控制电机的结构、工作原理以及运行特性,在自动控制系统和其它场合能够使用的各种控制电机,使学生初步具备选用各种控制电机的能力,并为毕业后从事专业工作打下坚实的基础。
二、实验地点1212 控制电机实验室1206电机实验室三、实验项目实验一直流无刷电机实验实验二直线电机实验实验三、自整角机实验实验四正余弦旋转变压器实验实验一直流无刷电机实验(一)实验目的1.通过实验测定直流无刷电机的主要技术参数。
2.掌握直流无刷电机的工作原理和运行特性。
(二)实验仪器设备及器材1.电机系统教学实验台主控制屏2.NMEL-27A 直流无刷电机及其控制系统3.双踪示波器(自备)(三)实验内容1.计算直流无刷电机的给定转速比,以及绘制给定转速曲线。
2.测定直流无刷电机紧急制动时间3.测定直流无刷电机自动停车时间(四)实验要求1、预习及思考1)直流无刷电机的工作原理和运行特性。
2)直流无刷电机的主要技术指标。
2、实验过程中的注意事项直流无刷电机的参考电源Vcc和地Gnd我们为了学生方便观测,都已经把该端点引到了面板上,学生使用的时候,千万注意不能将两者短接,否则造成设备损坏。
3、实验报告数据处理要求1)描述直流无刷电机的工作原理。
2)计算直流无刷电机的给定转速比,以及绘制给定转速曲线。
3)比较直流无刷电机紧急制动T1和自由停车T2的时间差,思考两者之间的区别,以及在实际当中的应用范围。
4、撰写实验报告(五)实验步骤1.实验装置各接线端子功能说明(1)6脚F/R:与(5脚GND)一起控制电机的正反转,相连时反转,断开时为正转。
“直流伺服电机系统的PID校正” 实验指导书 - 开放型实验管理系统
开放型实验 “直流伺服电机系统的PID 校正” 实验指导书一、实验目的1. 掌握PID 控制及其校正在控制系统中的应用;2. 熟悉直流伺服电机系统的PID 校正理论;3. 设计并验证PID 校正环节。
二、实验要求1. 根据给定的性能给定的性能指标,采用试凑法设计PID 校正环节,校正未校正系统,并验证。
2. 设未校正系统的开环传递函数为()()()112.01052.010++=s s s G ,设计PID 校正环节,使系统的性能指标达到:调整时间小于2s ,超调量不大于10%,稳态误差不大于1%。
三、实验设备1. GSMT2014 型直流伺服系统控制平台;2. PC 、MATLAB 平台; 四、直流伺服系统控制平台简介实际GSMT2014型直流伺服系统控制平台如图1.1所示。
该平台所使用的直流电机的额定电压为26V ,额定功率为70W ,最高转速为3000r/min ,电机的编码器为1000p/r 。
图1.1 GSMT2014型直流伺服系统控制平台GSTM2014实验平台是基于双电机高性能运动控制器GT400和智能伺服驱动器的直流伺服电机控制系统,由于GSMT2014平台增加了高性能的GT2014运动控制器,可以在MATLAB/simulink 软件下完成实时控制实验掌握通过实验数据来建立系统的数学模型的实验方法,以及现代控制理论的状态反馈法。
五、实验原理1.PID 简介在工业生产过程控制中,常用的基本调节规律有:P ,PI ,PD 和PID 控制。
加入PID 控制后,控制系统如图1.2所示。
图1.2 加入PID 控制器的系统框图1)P 控制器控制器的输出()t u 与误差作用信号()t e 的关系为 ()()t e K t u p =拉普拉斯变换量的形式为 ()()()()11-==pK s E s U s G式中,p K 为比例增益。
在相同的偏差下,p K 越大,输出也越大,因此p K 是衡量比例作用强弱的参数。
实验三 伺服控制系统综合实验20101207
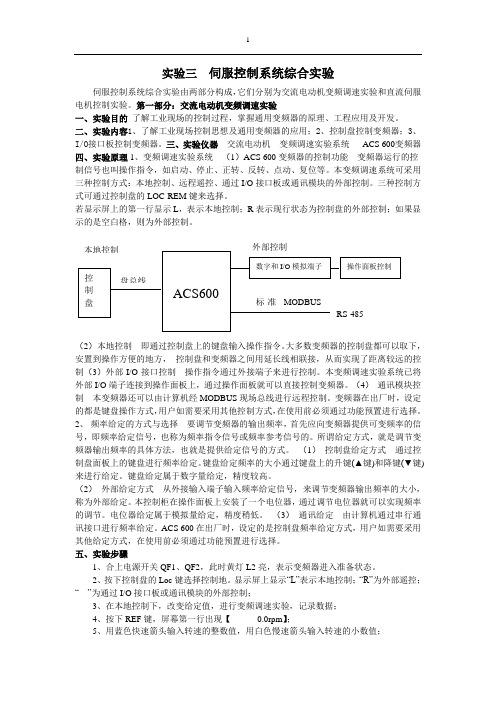
实验三伺服控制系统综合实验伺服控制系统综合实验由两部分构成,它们分别为交流电动机变频调速实验和直流伺服电机控制实验。
第一部分:交流电动机变频调速实验一、实验目的了解工业现场的控制过程,掌握通用变频器的原理、工程应用及开发。
二、实验内容1、了解工业现场控制思想及通用变频器的应用;2、控制盘控制变频器;3、I/O接口板控制变频器。
三、实验仪器交流电动机变频调速实验系统ACS 600变频器四、实验原理1、变频调速实验系统(1)ACS 600变频器的控制功能变频器运行的控制信号也叫操作指令,如启动、停止、正转、反转、点动、复位等。
本变频调速系统可采用三种控制方式:本地控制、远程遥控、通过I/O接口板或通讯模块的外部控制。
三种控制方式可通过控制盘的LOC·REM键来选择。
若显示屏上的第一行显示L,表示本地控制;R表示现行状态为控制盘的外部控制;如果显示的是空白格,则为外部控制。
(2)本地控制即通过控制盘上的键盘输入操作指令。
大多数变频器的控制盘都可以取下,安置到操作方便的地方,控制盘和变频器之间用延长线相联接,从而实现了距离较远的控制(3)外部I/O接口控制操作指令通过外接端子来进行控制。
本变频调速实验系统已将外部I/O端子连接到操作面板上,通过操作面板就可以直接控制变频器。
(4)通讯模块控制本变频器还可以由计算机经MODBUS现场总线进行远程控制。
变频器在出厂时,设定的都是键盘操作方式,用户如需要采用其他控制方式,在使用前必须通过功能预置进行选择。
2、频率给定的方式与选择要调节变频器的输出频率,首先应向变频器提供可变频率的信号,即频率给定信号,也称为频率指令信号或频率参考信号的。
所谓给定方式,就是调节变频器输出频率的具体方法,也就是提供给定信号的方式。
(1)控制盘给定方式通过控制盘面板上的键盘进行频率给定。
键盘给定频率的大小通过键盘上的升键(▲键)和降键(▼键)来进行给定。
键盘给定属于数字量给定,精度较高。
先进控制实验(直流伺服系统PID控制)
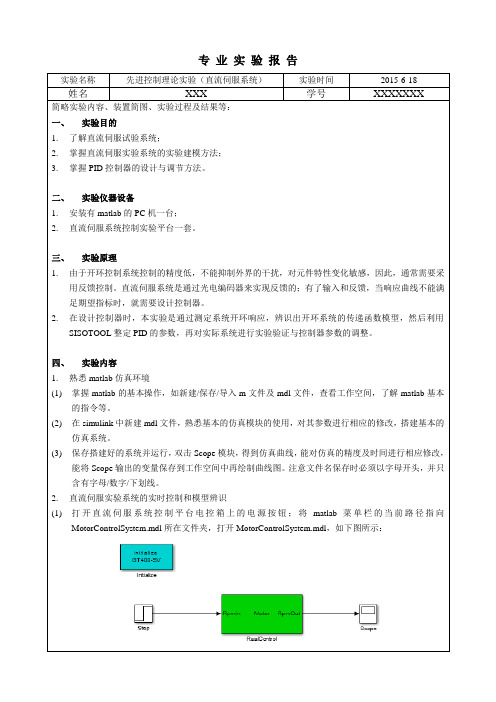
(1)建立控制系统,由于电机最高转速3000rpm,因此,阶跃信号不可太大或太小,以1000~2000rpm为宜,本实验取2000rpm。
(2)依次编译、连接、运行程序,电机开始转动,任其运行10s左右,然后停止程序;
(3)打开示波器,观察加入2000rpm的阶跃信号时直流伺服电机转速响应曲线,测量并记录超调量 ,峰值时间 ,调节时间 ,填入实验记录表中。
(2)用matlab系统辨识工具箱得二阶辨识模型的传递函数为: 。
接下来控制器的设计采用的是二阶的辨识模型。
2.PID参数整定
在SISO Design Tool界面中通过拖拽添加的零极点与增益大小,观察单位阶跃输入闭环响应曲线与开环系统的bode图,寻找到合适的P、I、D参数。
如图1为选取合适补偿器的参数,对应的SISO设计界面图以及单位阶跃响应分别如图2和图3所示。
3进一步加深了对控制理论的理解,熟悉了PID各参数对系统性能的影响,学到了PID参数整定的方法与技巧;
4在将Simulink中的实验数据导入到matlab工作空间并绘制图形的过程中,发现示波器输出数据为两列,第一列为时间,第二列为对应的转速,因此绘图语句为“plot(out(:,1),out(:,2))”,其中“out”为示波器输出值存于工作空间的变量名。
因为PID的形式为: ,所以,由图1补偿器的选取可确定PID的参数为: 、 、 。
图1选取合适补偿器的参数
图2选取合适补偿器参数的SISO界面图图3加补偿器后的阶跃响应曲线
3.PID控制效果检验
将设计好的PID控制器参数设定到闭环系统中,阶跃信号取2000rpm,依次编译、连接、运行程序。图4为加控制器与否的闭环响应曲线对比图,其中下面那根曲线为加控制器前的,上面那根为加PID控制器后的响应曲线;图5为辨识模型与实际系统的闭环响应曲线对比图,其中平滑的为辨识模型的闭环响应曲线,带毛刺的为实际系统的闭环响应曲线;实验结果记录表如下表1所示。
直流伺服电机实验报告
直流伺服电机实验报告直流伺服电机实验报告引言:直流伺服电机是一种常见的电动机类型,广泛应用于工业自动化、机械控制和航空航天等领域。
本实验旨在通过对直流伺服电机的测试和分析,了解其性能特点和控制原理。
一、实验目的本实验的主要目的是:1. 理解直流伺服电机的基本原理和工作方式;2. 测试直流伺服电机的性能参数,如转速、转矩和响应时间等;3. 掌握直流伺服电机的控制方法,如位置控制和速度控制。
二、实验装置与步骤1. 实验装置:本实验使用的实验装置包括直流伺服电机、电源、电压表、电流表、转速表和控制器等。
2. 实验步骤:(1)接线:按照实验装置的接线图连接电源、电机和测量仪器。
(2)电机参数测量:通过改变电压和电流的大小,测量直流伺服电机的转速和转矩特性。
(3)控制方法测试:使用控制器对直流伺服电机进行位置控制和速度控制,观察并记录控制效果。
三、实验结果与分析1. 电机参数测量结果:通过改变电压和电流的大小,测量了直流伺服电机在不同工作条件下的转速和转矩。
结果显示,随着电压和电流的增加,电机的转速和转矩也随之增加。
这说明直流伺服电机的性能受电压和电流的影响较大。
2. 控制方法测试结果:通过控制器对直流伺服电机进行位置控制和速度控制,观察了电机的响应时间和控制效果。
结果显示,直流伺服电机对位置控制和速度控制的响应时间较短,控制效果较好。
这说明直流伺服电机具有较高的控制精度和灵敏度。
四、实验结论通过本实验,我们对直流伺服电机的性能特点和控制原理有了更深入的了解。
实验结果表明,直流伺服电机具有较高的转速和转矩,且对位置控制和速度控制具有较好的响应性能。
这使得直流伺服电机在工业自动化和机械控制领域有着广泛的应用前景。
五、实验心得通过本次实验,我深入学习了直流伺服电机的工作原理和控制方法。
在实验过程中,我不仅掌握了实验装置的使用方法,还学会了如何测量和分析电机的性能参数。
这对我今后从事相关领域的研究和工作具有重要意义。
控制电机实验指导书
控制电机实验指导书机电工程学院自动化系2011年9月实验1 直流伺服电动机实验一、实验目的1.分析学握直流伺服电动机的运行原理。
2.拿握直流伺服电动机调节特性的测量方式。
二、实验方式和内容1.起动电动机,维持电动机输出转矩T=(),调节直流伺服电动机电枢电压(注:单方向调节控制屏上旋钮),直到n=1000r/min,测取直流伺服电动机的调节特性n=F(Ua)。
2.记录7-8组数据于表1中。
3.用坐标纸画出调节特性。
1三、实验注意事项1 •注意用电安全,所有实验需通过实验指导教师检査线路后方可合闸。
2•签到分两次进行,实验结束后应到签处处签到方可离开。
离开前应归还电表、实验指导书、工具等实验用具。
不得半途离开实验课堂。
3.不得高吉喧哗,听音乐。
4.如出现实验事故,应尺时断开电源,其他问题请参阅学生实验准则。
四、预习报告内容(占30分)1、实验名称、实验目的、实验原理和实验线路;2、主要仪器设备、名称、规格、数量及实验室编号;3、原始记录表格,估计算、特殊注意事项。
实验2 测速发电机实验一、实验目的1.通过实验加深对直流测速发电机工作特性的了解。
2.拿握直流发电机大体特性的测定方式。
二、实验方式和内容1•直流测速发电机的安装,将直流测速发电机(28CY09)与永磁直流驱动电机的细轴端连接,驱动电机的另一端与测功机轴连接。
将机箱控制面板的直流可调电源(()〜220V)接在驱动电机的电枢两头。
2•先将旋钮调至输出电压为零,再开电源,逐渐调节电压,驱动电机开始转动,带动直流测速发电机转动,用万用表的直流电压档,测试测速发电机的空载输岀电压特性。
3.测试空载输出电压特性时,测速机两头断开,不接电阻。
通过电压调转速,使转速别离为20()转/分、400转/分、……、1400转/分。
别离测出不同转速的空载电压,填入下表。
4.用坐标纸画出特性曲线。
表1数据表三、实验注感事项1 •注意用电安全,所有实验需通过实验指导教师检査线路后方可合闸。
直流伺服电动机实验报告2

淄博职业技术学院控制电机实验报告XX学院___年级XX班姓名________学号_________同组人__________实验日期________年_____月____日温度________ 湿度________实验二直流伺服电动机电磁力矩系数测量一、实验目的1、通过实验测出直流伺服电动机的参数ra、Ke、KT。
2、掌握直流伺服电动机的机械特性二、实验项目1、测直流伺服电动机的电枢电压、电流、力矩测量。
三、实验方法1、实验设备:7 光电转速表 12、测取直流伺服电动机的电磁力矩系数图4.1.2 直流伺服电动机接线图(1) 按实验指导书图示接线,图中R f1选用D42上1800Ω阻值,R1选用D42上900Ω与900并联共450Ω阻值采用分压器接法,S2选用D51,A1、A2选用两只D31上200mA档。
(2) 把R f1、R1调至最小,R L调至最大,开关S2打开,涡流测功机不加载。
先接通励磁电源,再接通电枢电源并调至220V,电机运行后把R1调至最大。
(3) 调节涡流测功机给定调节旋钮,给直流伺服电机加载。
同时调节直流伺服电机的励磁电阻R f1使电机达到n N=1600r/min,Ia=0.8A,U=U N=220V,此时电机的励磁电流即额定励磁电流。
(4) 保持此额定励磁电流不变,调节涡流测功机的给定调节旋钮逐渐减载,从额定负载到空载范围内测取将n、I a、T数据记录于表1-2中。
=220VNn(r/min) 1600I a(A) 0.8T(N.m) 62(数据在数值的基础上进行浮动即可)见课本P132Tem=Kt*i参数可见P211或者本页后(5) 调节电枢电压为U=110V ,保持I f =I fN 不变,调节涡流测功机的给定调节旋钮,使I a =0.8A ,再减小伺服电机的负载,一直到空载,其间记录7~8组数据于表1-4中。
四、实验报告1、由实验数据求得电机参数:R aref 、K e 、K TR aref ——直流伺服电动机的电枢电阻 ——电势常数——转矩常数 五、实验心得六、思考题1、若直流伺服电动机正(反)转速有差别,试分析其原因?(1)“零飘”,零点不是绝对零点,要调节零飘点,接近于0位置,正反转就基本一致了 (2)因为可控硅制造工艺和参数问题,实际上反转跟正传的电流环并不一致e T aNe KK n U K π300==。
伺服电机直流实验报告(3篇)
第1篇一、实验目的1. 了解伺服电机的工作原理及性能特点。
2. 掌握伺服电机的驱动与控制方法。
3. 通过实验验证伺服电机在直流电源下的运行特性。
二、实验原理伺服电机是一种用于自动控制系统中执行机械运动的电机,其特点是能够精确控制转速、位置和转矩。
直流伺服电机主要由永磁转子、电枢绕组和电刷等部分组成。
当给电枢绕组施加直流电压时,转子在磁场中受力产生转矩,从而使电机旋转。
三、实验设备1. 伺服电机2. 直流电源3. 电机驱动器4. 电流表、电压表5. 万用表6. 电脑及伺服电机控制软件四、实验步骤1. 连接电路:将伺服电机、直流电源、电机驱动器、电流表、电压表等设备按照实验电路图连接好。
2. 启动电机:打开直流电源,观察电机是否能够正常启动。
3. 测量电机参数:使用电流表、电压表和万用表测量电机的电流、电压和电阻等参数。
4. 调整电机转速:通过改变直流电源的输出电压,观察电机转速的变化,记录不同电压下的转速。
5. 控制电机位置:使用伺服电机控制软件,控制电机旋转到指定位置,并记录旋转角度。
6. 测量转矩:在电机旋转过程中,使用扭矩传感器测量电机输出的转矩,记录不同转速下的转矩。
7. 分析实验数据:根据实验数据,分析电机在不同工作条件下的性能特点。
五、实验结果与分析1. 电机启动:实验中,电机在接通直流电源后能够顺利启动。
2. 电机参数测量:通过测量,得到电机在空载和负载条件下的电流、电压和电阻等参数,为后续分析提供依据。
3. 电机转速:实验结果表明,电机转速与直流电源输出电压成正比,当电压升高时,电机转速也随之升高。
4. 电机位置:通过伺服电机控制软件,能够精确控制电机旋转到指定位置,且旋转角度稳定。
5. 电机转矩:实验结果表明,电机转矩与转速成反比,当转速升高时,电机转矩降低。
六、实验结论1. 直流伺服电机能够实现精确控制转速、位置和转矩。
2. 电机转速与直流电源输出电压成正比,转矩与转速成反比。
直流伺服电机实验报告

Uf=UfN=220V Ua=UN=220V
T(N·m)
1.13
1.00
0.90
0.80
0.70
0.60
n(r/min)
1603
1619
1628
1635
16426
0.87
0.77
0.68
1.用伏安法测电枢的直流电阻Ra
接线原理图见图6-11。
U:可调直流稳压电源。
R:1800Ω磁场调节电阻(MEL-03)。
V:直流电压表(MEL-06)。
A:直流安培表(MEL-06)
M:直流电机电枢
(1)经检查接线无误后,逆时针调节磁场调节电阻R使至最大。直流电压表量程选为300V档,直流安培表量程选为2A档。
Ia(A)
0.78
0.77
0.78
0.78
0.77
0.77
使电动机和测功机脱开,仍保持If=IfN,在电机空载状态,调节直流稳压电源(或R1阻值),使Ua从UN逐渐减小,记录电动机的n、Ua、Ia并填入表6-5中。
Uf=UfN=220V T=0N・m
n(r/min)
1758
1596
1434
1355
1273
根据以下理论知识:
调节特性在图像中表现为一簇斜线,始动电压Ua0= ,根据实验图像可得随着负载的增大,从原点到始动电压点出现“死区”的现象。
分析:实验所得到的数据与理论相对应,很好的证明了理论假设。
5.实验感想
取三次测量的平均值作为实际冷态电阻值Ra= 。
室温20℃
序号
UM(V)
Ia(A)
机电传动及控制_直流调速控制_试验指导书
“直流电机调速控制仿真试验”指导书一、实验目的:在Matlab环境中进行闭环直流电机控制系统搭建,通过改变模型参数,对比仿真结果变化,从而体会直流电机调速控制的基本工作原理。
二、实验准备:2.1 直流电机调速的基本原理什么是调速?要求电机按照给定转速信号对负载进行回转驱动,在此过程中应尽可能减小负载对转动速度的影响。
(他励直流电机)电机转速的调节机制,改变电机电枢两端的电压,实现电机转速的变化。
其过程描述如下:电枢电压升高-> 电枢回路中电流升高-> 系统驱动扭矩增大、加速->感生电动势增加-> 电流减小, 达到新的转速平衡点是否有其他调速方式?通过调节电枢回路中的电流进行电机转速调节。
三、实验要求:下图为带速度和电流闭环直流电机调速系统,请分析其工作原理,并搭建相应仿真电路进行仿真计算和数据说明。
图1 直流电机速度、电流闭环模型示意图四、思考题4.1 试将图中速度控制器(Speed Controller)配置为比例和比例积分环节两种情况,比对电机实际速度和设定速度之间的差异现象,并分析其原因。
4.2 试说明图中D1二极管的作用,并采用仿真方法进行验证。
附录:A.部分元件所在Matlab Simulink库中的位置1)DC machine 在simpowersystems下一级machines中2)GTO和D1二极管在simpowersystems下一级Power Electronice中3)Vd电压测量模块在simpowersystems下一级measurements中4)VDC280V和Vr240V在simpowersystems下一级Electrical sources中5)ls电感在simpowersystems下一级elements中6)Scope在simulink下一级sinks中7)PI模块在simpowersystems下一级extra library下一级discrete control blocks中8)demux在simpowersystems下一级machines中9)延长单元1/Z在simulink下一级discrete中10)速度给定单元在simulink下一级sources中11)电流环滞环控制器在simulink下一级Discontinuities中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
速度试运行模式系统接线方式:
速度试运行模式参数一览
参数代码
参数名称
功能简介
P-4
电机控制模式
选择速度试运行控制模式。(设定值:4)
五、实验步骤:
1.将NMEL-30-YJ-A直流伺服挂箱与伺服电机相连接。UVW三相一一对应;连接航空插座线。
2.确认接线无误后,上电。
3.设置参数Pn-4为4(速度试运行模式)
附录
如果电机与伺服驱动器参数不匹配,显示屏上会报ERR.3的错误。解决方法:重新下载参数。操作步骤如下:
此软件附带在光盘中,为博美德伺服软件。伺服配一根与PC机通信的通信线,如图所示:
接线完成后,上电,打开软件,界面如下所示:
点击COM选择与电脑连接的COM口(COM1/COM2/COM3/COM4中选一个),选择后弹出对话框内容为与伺服连接成功。表示已通信上。
2.确认接线无误后,上电。
3.设置Pn-4为2(设置运行模式为位置控制模式)
4.设置Pn-52为0(设定伺服驱动器接收指令脉冲的类型为指令/方向脉冲型指令)
5.设置Pn-53为0 (设定为0时,电机按方向指令运行;设定为1时,电机按与方向指令相反的方向运行)
6.设置PN48=1000 ; PN49=2048(此2参数为电子齿轮比)当脉冲频率达到100kHz时,电机转速达到3000转/分钟
6.PN-20设定模拟量指令方向。默认为0
7.设置PN34和PN35可设定加减速时间。默认为0
8.PN27为2.设定转矩指令类型为模拟量。
9.根据需要设置PN15设置模拟量指令增益。即电压与转矩的比例关系。
该参数用于设定模拟量电压与转矩指令的比例关系,电压范围为-10V~+10V。
设定增益值=(最大电压值/最大转矩百分比) 10。缺省值为100,即输入10V电压产生100%的额定转矩。
4.保存当前的参数设置,然后重启。保存参数操作流程如下:
注意事项:如果不保存或备份参数列表,驱动器断电后参数将丢失。
5.打开伺服使能。
方法:通过接通信号SRV_ON或者设置参数Pn-8为100000.
6.进入速度试运行。步骤如下图:
实验二
一、实验目的
通过本实验熟悉伺服驱动器参数设置基本操作方法,了解电机运行原理。
3.设置Pn4为3
4.设置Pn41的值,即点动模式下电机的运行速度。默认值为1500.
5.保存当前的参数设置,然后重启。操作流程如下:
注意事项:如果不保存或备份参数列表,驱动器断电后参数将丢失。
6.打开伺服使能。
方法:通过接通信号SRV_ON或者设置参数Pn-8为1ቤተ መጻሕፍቲ ባይዱ0000.
7.进入点动(JOG)模式运行。方法:
SM42-003-35DCB编码器分辨率为4096
P49=20; P48=10
VD100=100kHz SPD=2930
VD100=50kHz SPD=1465
P49=2048; P48=1000
VD100=100kHz SPD=3000
VD100=50kHz SPD=1500
7.保存当前的参数设置,然后重启。操作流程如下:
3.设置PN-4为1(设置控制模式为速度-转矩控制模式)
4.设置PN-40为1(设置接收速度指令类型为模拟量)
5.设置PN-18的值,根据需要设置。模拟量指令增益,即模拟量电压与电机转速的比例关系。
设定增益值=(最大电压值/最大转速指令) 30000
缺省值为100,即输入10V电压产生3000rpm转速
图3-1位置模式标准接线图
(一)PLC控制
脉冲由CPU224晶体管主机发出,脉冲类型为PNP,故接线方式如下
实验步骤:
1.将NMEL-30-YJ-A直流伺服挂箱与伺服电机相连接。UVW三相一一对应;连接航空插座线。
2.确认接线无误后,上电。
3.设置Pn-4为2(设置运行模式为位置控制模式)
4.设置Pn-52为0(设定伺服驱动器接收指令脉冲的类型为指令/方向脉冲型指令)
5.设置Pn-53为0 (设定为0时,电机按方向指令运行;设定为1时,电机按与方向指令相反的方向运行)
6.设置PN48=1000 ; PN49=2048(此2参数为电子齿轮比)当脉冲频率达到100kHz时,电机转速达到3000转/分钟
SM42-003-35DCB编码器分辨率为4096
P49=20; P48=10
第二步:点击File选择Parameters Download选项,弹出选择需要下载的参数文件,选择“20130823.par”文件,点击确定,进行参数下载。下载完成后重启伺服驱动器。继续进行实验。
此软件与参数文件会附在光盘中。
直流伺服控制系统实验
实验一速度试运行2
实验二点动控制运行5
实验三位置控制模式实验8
实验四转速、转矩控制实验13
附录关于参数16
实验一
一、实验目的
通过本实验熟悉伺服驱动器参数设置基本操作方法,了解电机运行原理。
二、实验器件
挂箱NMEL-30-YJ-A以及直流伺服电机一只
三、关于速度试运行:
内部指令控制,无需接收上位机指令
12.电机按照脉冲给定的速度运行。
(二)挂箱脉冲控制
脉冲由NMEL-30-YJ-A挂箱左下部分产生,该脉冲类型为NPN,故接线方式如下
注:由于挂箱上脉冲发生器部分电压为5V,故无需接上图的限流电阻。
实验步骤:
1.将NMEL-30-YJ-A直流伺服挂箱与伺服电机相连接。UVW三相一一对应;连接航空插座线。
10.保存当前的参数设置,然后重启。操作流程如下:
注意事项:如果不保存或备份参数列表,驱动器断电后参数将丢失。
11.断电情况下进行接线,接入模拟量。如果是转速控制,-10V~+10V加在 两个端子上;如果是转矩控制,模拟量加在 之间。AGND端子接地
12.确认接线无误后,上电,打开伺服使能。
13.发送模拟量,使电机运转起来。
8.接线。
按如下图进行接线。脉冲给定可以是挂箱上两路脉冲,也可以是上位机发出的脉冲。
如果PLC发脉冲,按如下接线:
9.检查接线无误后再次上电。
10.下载程序到PLC.在程序监控中将VD100赋值,然后按启动(I0.0启动信号)。
11.打开伺服使能。
方法:通过接通信号Servo_En或者设置参数Pn-8为100000.
注意事项:如果不保存或备份参数列表,驱动器断电后参数将丢失。
8.接线。
按如下图进行接线
9.检查接线无误后再次上电。
10.打开伺服使能。
方法:通过接通信号Servo_En或者设置参数Pn-8为100000.
11.电机按照脉冲给定的速度运行。
实验
一、实验目的
通过本实验了解直流伺服转速/转矩控制基本原理,掌握控制的方法
二、实验器件
挂箱NMEL-30-YJ-A以及直流伺服电机一只
三、关于点动控制运行
内部指令控制,无需接收上位机指令
四、实验内容
点动控制系统接线方式
图2-1点动(JOG)控制模式标准接线图
点动(JOG)控制模式参数一览
参数代码
参数名称
功能简介
P-4
电机控制模式
选择点动控制模式。(设定值:3)
P-8
上位机接口低6位端子取反控制
进入菜单
实验三
一、实验目的
通过本了解直流伺服位置控制基本原理,掌握通过PLC发出脉冲对直流伺服进行位置控制的方法
二、实验器件
挂箱NMEL-30-YJ-A以及直流伺服电机一只;挂箱GDJ-CPU-S-C-EH-YJ-A
三、关于位置控制:
PLC指令脉冲输入:指令/方向脉冲
四、实验内容
位置模式标准接线图:
VD100=100kHz SPD=2930
VD100=50kHz SPD=1465
P49=2048; P48=1000
VD100=100kHz SPD=3000
VD100=50kHz SPD=1500
7.保存当前的参数设置,然后重启。操作流程如下:
注意事项:如果不保存或备份参数列表,驱动器断电后参数将丢失。
可对信号进行取反操作,打开伺服时能,节省外部接线。(设定值:100000)
P-41
JOG模式速度设置
设置JOG模式下电机的运行速度,默认值为1500,单位为rpm。
五、实验步骤:
1.将NMEL-30-YJ-A直流伺服挂箱与伺服电机相连接。UVW三相一一对应;连接航空插座线。
2.确认接线无误后,上电。
二、实验器件
挂箱NMEL-30-YJ-A以及直流伺服电机一只
三、关于位置控制:
±10V模拟量输入,可控制转速和转矩
四、实验内容
速度-转矩模式接线图
图4-1速度-转矩模式标准接线图
四、实验步骤:
1.将NMEL-30-YJ-A直流伺服挂箱与伺服电机相连接。UVW三相一一对应;连接航空插座线。
2.确认接线无误后,上电。