防抖设计总结
增量式编码器抗抖动设计.doc

}
P1IE |= BIT0 + BIT1; P1IES &= ~(BIT0 + BIT1); }
float Get_Angle( ) { float angle; angle = Counter/25000*360; return angle; } #pragma vector=PORT1_VECTOR __interrupt void Port1_Interrupt(void)
被避免的。
图 2 编码器产生抖动示意图 编码器受外界干扰产生抖动时其输出波形如图 3 所示。
图 3 编码器抖动时输出波形 当然我们使用软件的方法也是可以把这种抖动干扰去除掉,但其浪费控制器 很大一部分软件资源(要求处理器响应速度异常的高),这就会给我们的软件设 计带来非常大的麻烦,本人已使用软件实现了设计要求,在性能方面不是很好, 一般干扰处理是没有问题,对于一些高频率的抖动干扰,软件响应还是不能够及 时,这里不讨论。这里我们借助一些逻辑硬件对编码器输出信号进行处理。其原 理如图 4 所示。
图 4 编码器去抖动硬件原理图
其设计的基本思想是,对编码器在没有抖动时的输出波形立为标准标准波 形,如图 1 所示波形,将编码器输出的波形与标准波形进行比对,如果其对应的 逻辑都相同,则认为是正常输出,否则确定为干扰,编码器输出为低电平。下面 以正旋运动时其对原理进行详细分析。当编码器正旋输出时(图 1 所示)当 A 相的上升沿到来时 B 相输出为低电平,B 相上升沿到来时 A 相输出高电平,A 相下降沿到来时 B 相输出为高电平,当 B 相下降沿到来时 A 相输出低电平,也 就是说在一个脉冲输出周期中,在 A、B 相的边沿到来时,令 A、B 输出结果为 1,其顺序为B!-A-B-A!,如果能判定出这几个信息则输出信号可以确定 为正常输出,否则判定为抖动输出。我们以图 5 中的波形结合图 4 中的硬件原理 进行分析,设触发器初始值为 1。图 5 中通过AB相的波形,我们很容易判定, 该编码器为正旋运动,正常输出2个脉冲,B相中的其余脉冲都为抖动造成。这 里用‘+’表示信号上升沿,‘-’表示信号下降沿。以 A+作为一个检测比对周期 的开始,以 B-作为检测周期的结束,共在 4 个边沿出将输出信号与标准波形进 行判定和比对。A+时 B 为 0,U6A 触发器(触发器的传递函数为 Q=D,Q!=D!) FQ1=Q!=B!=1,则可认为这个点的波形是正确的,B+时 A 为 1,U1A 触发器 FQ2=Q=A=1,此处波形也符合标准波形,A-时 B 为 1,U6B 触发器 FQ3=Q=B=1, 该点符合标准波形,B-时 A 为 1,U1B 触发器 FQ4=Q!=A=0,此处波形不符合
防抖动算法 -回复
防抖动算法-回复防抖动算法是一种常用于信号处理和控制系统中的技术,它的作用是减少输入信号的噪声或抖动,以提高系统的稳定性和可靠性。
本文将以防抖动算法为主题,分别介绍防抖动算法的原理、应用场景、实现方法和效果评估等方面内容。
一、防抖动算法的原理防抖动算法的原理是基于输入信号的频率和振幅特征进行分析,通过对信号进行采样和滤波处理,来减少信号中的噪声或抖动。
具体来说,防抖动算法的处理流程如下:1. 信号采样:通过传感器或输入设备对信号进行采样,得到离散的信号序列。
2. 信号滤波:对采样得到的信号序列进行滤波处理,去除高频噪声或抖动成分。
3. 信号持续时间判断:根据信号的持续时间和幅值变化程度来确定信号是否属于噪声或抖动。
4. 抖动判定阈值:设置一个合适的阈值来判断信号是否超过了噪声或抖动的限制范围。
5. 信号响应:根据信号的判断结果,作出相应的控制或响应动作。
二、防抖动算法的应用场景防抖动算法在很多领域都有广泛的应用,下面列举几个常见的应用场景。
1. 机械控制系统:在机械控制系统中,如机械臂的运动控制或机器人的导航控制,防抖动算法可以有效降低由于传感器噪声或机械震动引起的系统误差。
2. 电子设备:在电子设备中,如手机、平板电脑等触摸屏的操作,防抖动算法可以提高用户体验,减少误操作。
3. 通信系统:在无线通信系统中,如无线传感器网络或移动通信网络,防抖动算法可以提高信号的可靠性和抗干扰能力。
4. 视频图像处理:在视频图像处理中,如图像稳定、图像去抖动等应用场景。
三、防抖动算法的实现方法防抖动算法的实现方法主要包括滤波器的选择和参数设置、阈值的确定以及响应动作的设计等。
1. 滤波器选择和参数设置:选择适当的滤波器进行信号滤波,常用的滤波器有低通滤波器、中通滤波器和带通滤波器等。
参数的设置需要根据信号的特征和系统的需求进行调整。
2. 阈值的确定:根据信号的特征和系统的需求,设置合适的阈值来判断信号是否超过了抖动或噪声的限制范围。
单片机如何防抖的设置方法

单片机如何防抖的设置方法
单片机防抖的设置方法有以下几种:
1. 硬件防抖:通过外部电路来进行防抖,常见的方式是使用RC电路或者电容滤波器来消除按键的抖动。
这种方法简单易行,但需要额外的硬件电路支持。
2. 软件防抖:通过编写软件程序来实现防抖功能。
常见的方法是使用延时函数,在按键按下后延时一段时间再进行处理,如果在延时期间按键状态没有发生变化,则认为按键有效。
这种方法相对简单,但可能会引入一定的延迟。
3. 硬件与软件结合防抖:可以同时使用硬件和软件的方式来实现防抖。
例如,使用硬件电路进行初步的滤波,然后在软件中再进行一次判断,确保按键状态的稳定。
需要注意的是,防抖的设置方法需要根据具体的单片机和应用场景来确定,不同的单片机可能有不同的实现方法。
同时,防抖的设置也需要根据实际需求来调整,过长的延时可能会导致按键响应不灵敏,而过短的延时可能会引入抖动。
因此,在设置防抖时需要进行一定的实验和调试。
来自防抖的力量——数码单反DC防抖技术分析

襞县ife14随着数码单反相机的价格日渐走低.其在市场的普及速度越来越快,玩家对于相机和镜头的要求也是越来越高。
1994年尼赢推出了第一款具有减震系统(VR)技术的旁轴相机Zoom—Touch105VR,1995年佳能公司推出世界上第一枚带有图像稳定器的镜头EOS75—300mm/4—56IS,其中lS就是我们习惯上提到的“防抖系统”。
到目前为止,能够在数码单反相机上实现|坊抖功能的方式有两种.一种是镜头防抖,另外一种是机身防抖。
佳能和尼康都以光学镜头防抖动的方式来达成矫正抖动的目的,各自的第二代防抖动技术.都宣称可bl让安全快门速度降低3—4级。
而机身内建防抖功能目前被广泛推崇,包括索尼、宾得、三星和奥林巴斯在内的厂商,已经将其在低端人门级机型中普厦,它是通过感光元件的晃动来自动矫正光轴.可以让每支镜头部获得防抖动性能,更具有性价比。
下文我们将逐一给大家介绍各品牌镜头或者机身的防抖技术。
尼庸MR镍头防抖VR全称VibrationReduction.它是利用光学镜片偏移式原理来矫正手振,整个系统由检测部分、补偿振动镜片组和驱动控制部分等组成.并依靠补偿振动镜片的浮动来矫正因为手撮而引起的影像模糊。
从成像质量上看.虽然镜头内的补偿振动镜片组是以动态为前提而设计的,但图像中心的品质依然是非常高超的。
由于尼康VR减震技术运用镜片浮动原理束纠正光轴偏移,因此不仅减震模块体积较大,而且价格昂贵,措载了VR减震技术的单反镜头价格普遍不菲,而且基本都是定焦微距离、长焦以及超长焦镜头。
一开始尼康VR防抖技术主要被运用在军事、天文观测、体育赛事等领域,并非普通>自费者可以享受的.不过到了2006年,尼康也逐渐将其应用在中端的P系列数码相机上面。
VR防抖技术虽然比较成熟。
但面对市场上其他品牌的防抖技术已经没有什么优势。
所以在2006年初,尼康又再接再厉,推出了VRII防抖系统,根据官方资料显示.可以迭到相当于4档半快门速度。
前端防抖动逻辑-概述说明以及解释

前端防抖动逻辑-概述说明以及解释1.引言1.1 概述概述部分内容:前端防抖动逻辑是一种常见的前端技术,用于限制事件触发的频率。
在用户与页面进行交互时,特别是在一些频繁触发的事件(如滚动、搜索输入等)中,如果没有适当的控制,可能会导致页面性能下降、用户体验差等问题。
为了解决这个问题,前端防抖动逻辑应运而生。
通过该逻辑,可以在事件触发后延时处理,当在指定的时间间隔内再次触发该事件时,前一个事件会被取消,只有最后一次事件被执行。
这样可以有效减少不必要的重复计算和请求,提高页面的性能与响应速度。
本文将深入探讨前端防抖动逻辑的原理和实现方式,并重点强调其在前端开发中的重要性。
通过学习和理解前端防抖动逻辑,开发者可以更好地优化和提升前端应用的性能和用户体验。
同时,我们还将介绍一些常见的防抖动逻辑的应用场景,并提供了一些实际的代码示例来帮助读者更好地理解和应用该技术。
通过本文的阅读,读者将能够掌握前端防抖动逻辑的基本原理和实现方式,并能够根据具体的业务场景和需求,灵活地运用该技术来提高前端应用的质量和性能。
在前端开发中,了解和掌握这样的技术将为开发者带来更多的优势和机会,也将为用户提供更好的使用体验。
1.2 文章结构文章结构部分的内容:文章结构主要包括引言、正文和结论三个部分。
在引言部分,我们将对前端防抖动逻辑进行概述,介绍文章的结构和目的。
在正文部分,我们将深入探讨前端防抖动逻辑的定义和原理,并举例说明其应用场景和效果。
在结论部分,我们将总结前端防抖动逻辑的重要性,并分享一些实现前端防抖动逻辑的方法和技巧。
通过本文的阅读,读者将会对前端防抖动逻辑有更深入的了解,进一步提升前端开发的效率和用户体验。
1.3 目的本文的目的是介绍和解释前端防抖动逻辑的概念和原理。
通过深入探讨该逻辑的重要性和实现方法,旨在帮助读者更好地理解和应用前端防抖动逻辑,提升前端开发的效率和用户体验。
在当前的Web开发中,前端页面中的交互越来越多,用户的操作往往会触发频繁的事件,比如点击、滚动、拖动等等。
遥信防抖动设计方案
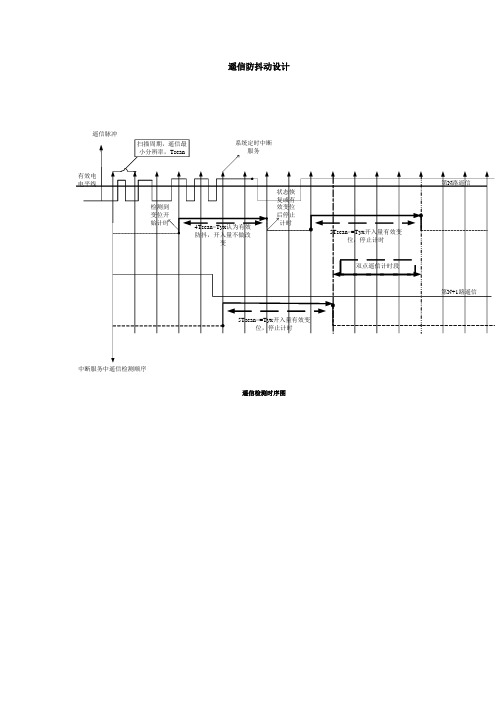
遥信防抖动设计中断服务中遥信检测顺序遥信检测时序图遥信检测软件流程图遥信检测注意事项:1:遥信检测必须对位变量检测,当遥信数目较多时,应采用单点顺序检测并各个遥信独立建立计时计数器计时;2:为有效防抖,遥信分辨率时间,也就是遥测循环检测终端时间不可大于遥信防抖动时间。
典型错误案例1:不是对单个位变量检测//遥信检测建立标志位+电池检测void check_yx ( void ){if ( switchin1.all != ( *KRReg ) ) {if ( switchin_flag == 0 ) {switchin_flag = 1;switchin_time = 0;KRBIT.all = ( *KRReg );}} else {switchin_flag = 0;switchin_time = 0;}}//遥信记录处理+电池检测void save_yx ( void ){uint16 i;if ( switchin_flag == 1 ) {if ( ( switchin_time * 1 ) >= TerPara.yx_filter_time ) {//switchin1.all=KRBIT.all;// KRBIT.all = yx_chang(switchin1.all);if ( switchin1.bit.KR1 != KRBIT.bit.KR1 || switchin1.bit.KR2 != KRBIT.bit.KR2 ) {if ( switchin1.bit.KR1 != KRBIT.bit.KR1 ) {switchin.bit.KR1 = ~switchin.bit.KR1;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR1;produce_soe_event ( NULL, 1, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR2 != KRBIT.bit.KR2 ) {switchin.bit.KR2 = ~switchin.bit.KR2;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR2;produce_soe_event ( NULL, 2, DISP_Z , POP_EVENT_SOE );}if ( switchin.bit.KR1 == 1 && switchin.bit.KR2 == 0 ) {//断路器1合produce_soe_event ( NULL, 0x002C, DISP_TIME , POP_EVENT_SOE );} else if ( switchin.bit.KR1 == 0 && switchin.bit.KR2 == 1 ) {//断路器1分produce_soe_event ( NULL, 0x002D, DISP_TIME ,POP_EVENT_SOE );} else {//断路器1位置异常produce_soe_event ( NULL, 0x002E, DISP_TIME , POP_EVENT_SOE );}}if ( switchin1.bit.KR3 != KRBIT.bit.KR3 ) {switchin.bit.KR3 = ~switchin.bit.KR3;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR3;produce_soe_event ( NULL, 3, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR4 != KRBIT.bit.KR4 ) {switchin.bit.KR4 = ~switchin.bit.KR4;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR4;produce_soe_event ( NULL, 4, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR5 != KRBIT.bit.KR5 ) {switchin.bit.KR5 = ~switchin.bit.KR5;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR5;produce_soe_event ( NULL, 5, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR6 != KRBIT.bit.KR6 ) {switchin.bit.KR6 = ~switchin.bit.KR6;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR6;produce_soe_event ( NULL, 6, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR7 != KRBIT.bit.KR7 ) {switchin.bit.KR7 = ~switchin.bit.KR7;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR7;produce_soe_event ( NULL, 7, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR8 != KRBIT.bit.KR8 ) {switchin.bit.KR8 = ~switchin.bit.KR8;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR8;produce_soe_event ( NULL, 8, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR9 != KRBIT.bit.KR9 || switchin1.bit.KR10 !=KRBIT.bit.KR10 ) {if ( switchin1.bit.KR9 != KRBIT.bit.KR9 ) {switchin.bit.KR9 = ~switchin.bit.KR9;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR9;produce_soe_event ( NULL, 9, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR10 != KRBIT.bit.KR10 ) {switchin.bit.KR10 = ~switchin.bit.KR10;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR10;produce_soe_event ( NULL, 10, DISP_Z , POP_EVENT_SOE );}if ( switchin.bit.KR9 == 1 && switchin.bit.KR10 == 0 ) {//断路器2合produce_soe_event ( NULL, 0x002F, DISP_TIME , POP_EVENT_SOE );} else if ( switchin.bit.KR9 == 0 && switchin.bit.KR10 == 1 ) {//断路器2分produce_soe_event ( NULL, 0x0030, DISP_TIME , POP_EVENT_SOE );} else {//断路器2位置异常produce_soe_event ( NULL, 0x0031, DISP_TIME , POP_EVENT_SOE );}}if ( switchin1.bit.KR11 != KRBIT.bit.KR11 ) {switchin.bit.KR11 = ~switchin.bit.KR11;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR11;produce_soe_event ( NULL, 11, DISP_Z, POP_EVENT_SOE );}if ( switchin1.bit.KR12 != KRBIT.bit.KR12 ) {switchin.bit.KR12 = ~switchin.bit.KR12;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR12;produce_soe_event ( NULL, 12, DISP_Z , POP_EVENT_SOE );}if ( switchin1.bit.KR13 != KRBIT.bit.KR13 ) {switchin.bit.KR13 = ~switchin.bit.KR13;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR13;produce_soe_event ( NULL, 13, DISP_Z, POP_EVENT_SOE );}if ( switchin1.bit.KR14 != KRBIT.bit.KR14 ) {switchin.bit.KR14 = ~switchin.bit.KR14;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR14;produce_soe_event ( NULL, 14, DISP_Z , POP_EVENT_SOE );if ( switchin.bit.KR14 == 0 ) {lose_power_flag = 1;shut_power_time = 0;produce_soedv ( 0x3a, DISP_Z, POP_DV_SOE );//装置故障记录-电池失压if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30back_up_keyfuncindex = keyfuncindex;back_up_flag = 1;}// keyfuncindex = 18;// numkey = 1;//soe_disp_flag = 1;BATTERY_OPEN;//电池失压报警灯点亮} else {lose_power_flag = 0;shut_power_time = 0;produce_soedv ( 0x37, DISP_Z, POP_DV_SOE );//装置故障记录-电池恢复// if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30// back_up_keyfuncindex = keyfuncindex;// back_up_flag = 1;// }//keyfuncindex = 18;//numkey = 1;//soe_disp_flag = 1;BATTERY_CLOSE;//电池失压报警灯灭}}if ( switchin1.bit.KR15 != KRBIT.bit.KR15 ) {switchin.bit.KR15 = ~switchin.bit.KR15;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR15;produce_soe_event ( NULL, 15, DISP_Z, POP_EVENT_SOE );if ( switchin.bit.KR15 == 0 ) {produce_soedv ( 0x3b, DISP_Z , POP_DV_SOE );//装置故障记录-电源故障// if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30// back_up_keyfuncindex = keyfuncindex;// back_up_flag = 1;// }//keyfuncindex = 18;//numkey = 1;//soe_disp_flag = 1;} else {produce_soedv ( 0x38, DISP_Z , POP_DV_SOE );//装置故障记录-电源恢复// if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30// back_up_keyfuncindex = keyfuncindex;// back_up_flag = 1;// }//keyfuncindex = 18;//numkey = 1;//soe_disp_flag = 1;}}if ( switchin1.bit.KR16 != KRBIT.bit.KR16 ) {switchin.bit.KR16 = ~switchin.bit.KR16;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR16;produce_soe_event ( NULL, 16, DISP_Z, POP_EVENT_SOE );if ( switchin.bit.KR16 == 0 ) {produce_soedv ( 0x3c, DISP_Z, POP_DV_SOE );//装置故障记录-主交流失电// if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30// back_up_keyfuncindex = keyfuncindex;/// back_up_flag = 1;//}// keyfuncindex = 18;// numkey = 1;// soe_disp_flag = 1;AC_OPEN; //主交流报警灯点亮} else {produce_soedv ( 0x39, DISP_Z, POP_DV_SOE );//装置故障记录-主交流恢复// if ( back_up_flag == 0 ) {//当前界面索引号,在历史记录中返回时可以返回当前界面modify by zf 2011.3.30// back_up_keyfuncindex = keyfuncindex;// back_up_flag = 1;// }// keyfuncindex = 18;// numkey = 1;// soe_disp_flag = 1;AC_CLOSE; //主交流报警灯灭}}switchin1 = KRBIT;switchin_flag = 0;switchin_time = 0;for ( i = 0;i < 16;i++ ) {if ( switchin.all && ( 0x001 << i ) ) {( SortYxTable[i].pdata ) = 0x0001;} else( SortYxTable[i].pdata ) = 0;}}}}修改后://遥信检测建立标志位+电池检测void check_yx ( void ){unsigned int i;for( i = 0;i < 16; i++){if ( ( switchin1.all & (0x0001<<i) ) != ( ( *KRReg ) & (0x0001 << i) ) ) {if ( switchin_flag[i] == 0 ) {switchin_flag[i] = 1;switchin_time[i] = 0;//KRBIT.all |= ( ( *KRReg ) & ( 0x0001 << i ) );}} else {switchin_flag[i] = 0;switchin_time[i]= 0;}}for ( i = 0;i < 16; i++){if(switchin_flag[i]==1){if ( switchin_time[i]>= TerPara.yx_filter_time){if( ((switchin1.all) & (0x0001<<i))!=0){//为1switchin1.all &= (~(0x0001 << i ) );}else{//为0switchin1.all |= (0x0001 << i );}if( ((switchin.all) & (0x0001<<i))!=0){//为1switchin.all &= (~(0x0001 << i ) );//值0}else{//为0switchin.all |= (0x0001 << i );//值1}if(i==13){if ( switchin.bit.KR14 == 0 ) {lose_power_flag = 1;shut_power_time = 0;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR14;produce_soedv ( 0x3A, DISP_TIME, POP_DV_SOE );//装置故障记录-电池失压BATTERY_OPEN;//电池失压报警灯点亮} else {lose_power_flag = 0;shut_power_time = 0;SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR14;produce_soedv ( 0x37, DISP_TIME, POP_DV_SOE );//装置故障记录-电池恢复BATTERY_CLOSE;//电池失压报警灯灭}}if(i==14){if ( switchin.bit.KR15 == 0 ) {SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR15;produce_soedv ( 0x3b, DISP_TIME , POP_DV_SOE );//装置故障记录-电源故障} else {SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR15;produce_soedv ( 0x38, DISP_TIME , POP_DV_SOE );//装置故障记录-电源恢复}}if(i==15){if ( switchin.bit.KR16 == 1 ) {//modify by zf 2011.5.21SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR16;produce_soedv ( 0x3c, DISP_TIME, POP_DV_SOE );//装置故障记录- 主交流失电AC_OPEN; //主交流失电报警灯亮} else {SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = switchin.bit.KR16;produce_soedv ( 0x39, DISP_TIME, POP_DV_SOE );//装置故障记录- 主交流恢复AC_CLOSE; //主交流报警灯灭}}if(switchin.all & (0x0001<<i)){SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = 1;}else{SoeBuffer.SoeData[SoeBuffer.SoeCnt].status = 0;}produce_soe_event ( NULL, i+1, DISP_Z , POP_EVENT_SOE );if ( switchin.all && ( 0x0001 << i ) ) {( SortYxTable[i].pdata ) = 0x0001;} else{( SortYxTable[i].pdata ) = 0;}switchin_flag[i] = 0;switchin_time[i] = 0;}}}couple_yx();}void couple_yx (void){static unsigned int breaker_new[2];unsigned int i,j,k;for(i=0;i<2;i++){//breaker_new[i]= SortYxTable[i + i * 8].pdata + SortYxTable[i + 1+ i * 8].pdata * 2 ;if(i==0)breaker_new[0]=switchin.bit.KR1 + switchin.bit.KR2 * 2 ;if(i==1)breaker_new[1]=switchin.bit.KR9 + switchin.bit.KR10* 2 ;if(breaker_state[i]!=breaker_new[i]){for(k=0;k<4;k++){if(breaker_new[i]== k ){if(breaker_flag[i][k]==0){breaker_flag[i][k] = 1;breaker_time[i][k] = 0;}}else{breaker_flag[i][k] = 0;breaker_time[i][k] = 0;}}}}for(i=0; i<2; i++){for(j=0;j<4;j++){if(breaker_time[i][j]>=2000){breaker_state[i]=breaker_new[i];switch(j){case BREAKER_NC1:breaker_flag[i][BREAKER_NC1] = 0;breaker_time[i][BREAKER_NC1] = 0;produce_soe_event ( NULL, 0x002E + i * 3, DISP_TIME , POP_EVENT_SOE );//异常break;case BREAKER_CUT:breaker_flag[i][BREAKER_CUT] = 0;breaker_time[i][BREAKER_CUT] = 0;produce_soe_event ( NULL, 0x002D + i * 3, DISP_TIME , POP_EVENT_SOE );//分break;case BREAKER_CLOS:breaker_flag[i][BREAKER_CLOS] = 0;breaker_time[i][BREAKER_CLOS] = 0;produce_soe_event ( NULL, 0x002C + i * 3, DISP_TIME , POP_EVENT_SOE );//合break;case BREAKER_NC2:breaker_flag[i][BREAKER_NC2] = 0;breaker_time[i][BREAKER_NC2] = 0;produce_soe_event ( NULL, 0x002E + i * 3, DISP_TIME ,POP_EVENT_SOE );//异常break;default:break;}}}}}典型错误案例2:头尾检测/*void check_di(void){uint8 i,*p;Handle_di();for (i=0;i<48 ;i++ ){if (TimerWobble[i]!=0){TimerWobble[i]++;if (TimerWobble[i]>=TerPara.yx_filter_time){TimerWobble[i]=0;if (Yx_temp[i]!=Yx[i]){#if DEBUG>0out_put("yxc");#endifYx[i]=Yx_temp[i];p=(uint8 *)&Yx[i];produce_soe(p);}}}else{if (Yx_temp[i]!=Yx[i]){TimerWobble[i]++;}}}}*/修改后:void check_di(void){uint8 i,*p;Handle_di();for (i=0;i<48 ;i++ ){if (Yx_temp[i]!=Yx[i]){TimerWobble[i]++;if (TimerWobble[i]>=TerPara.yx_filter_time){TimerWobble[i]=0;#if DEBUG>0out_put("yxc");#endifYx[i]=Yx_temp[i];Yx_temp_gz[i] = Yx_temp[i];p=(uint8 *)&Yx[i];produce_soe(p);}}else{TimerWobble[i] = 0;}}}。
提升视频稳定度 Final Cut Pro画面防抖技巧
提升视频稳定度:Final Cut Pro画面防抖技巧拍摄稳定的视频是每个视觉创作者的追求之一。
然而,即使使用最先进的摄像设备,有时仍然难以避免摄像机晃动或图像抖动的问题。
这就是为什么Final Cut Pro是一个强大的工具,它提供了一些画面防抖技巧,可以有效地解决这个问题。
1.剪切修剪在Final Cut Pro中,使用剪切修剪工具可以通过修剪和裁剪视频镜头来减少图像抖动。
选择要修剪的镜头并使用修剪工具将其裁剪到所需的长度。
这样可以去除镜头开始和结束时的抖动。
2.运动模糊运动模糊是一种有效的方法,可以在视频中创造出一种平滑的效果,并减少图像的抖动。
在Final Cut Pro中,选择要应用运动模糊的镜头,在“效果”选项卡中找到“运动模糊”并将其拖动到时间线上的镜头上。
调整模糊的强度以达到所需的效果。
3.稳定器效果Final Cut Pro中的稳定器效果是一种专门用于减少视频抖动的工具。
在“效果”选项卡中,找到“稳定器”并将其拖动到需要修复的镜头上。
稳定器会分析图像并尝试自动修复抖动。
可以根据需要调整稳定器的参数,以获得最佳效果。
4.关键帧调整关键帧调整是一种在Final Cut Pro中使用的高级技巧,可以进一步改善图像的抖动。
选择要调整的镜头,并在“视频”选项卡中选择“关键帧调整”。
在时间线上选择一个关键帧,并使用调节工具微调图像的位置和旋转,直到抖动减少。
可以添加多个关键帧以进行更精细的调整。
5.调整图像稳定性Final Cut Pro提供了一些图像稳定性的参数调整选项,可用于进一步改善画面的稳定性。
在“视频”选项卡中,找到图像稳定性选项并进行微调。
可以调整抖动的解析度、最大平滑度和透视校正等参数,以获得最佳的图像稳定效果。
总结起来,Final Cut Pro是一个功能强大的视频编辑软件,拥有一些优秀的画面防抖技巧,可以提升视频的稳定度。
剪切修剪、运动模糊、稳定器效果、关键帧调整和图像稳定性调整,都是减少图像抖动的有效方法。
相机防抖技巧

相机防抖技巧相机防抖技巧是摄影中常用的一项技术,它能有效降低由手部颤抖或镜头晃动引起的模糊照片。
今天,我将与大家分享几种实用的相机防抖技巧,帮助你拍摄更清晰、更稳定的照片。
1. 使用稳定的拍摄姿势一个稳定的拍摄姿势是防抖的基础。
双手握紧相机,将肘部紧靠身体,双腿稍微分开,使身体形成一个稳定的三角支撑。
当按下快门时,尽量保持身体静止,避免颤抖带来的影响。
2. 调整快门速度快门速度直接影响到照片的清晰度。
当你手持相机时,一般快门速度应该不低于焦距的倒数。
例如,使用50mm镜头时,快门速度应该设置为1/50秒或更快。
如果你使用较长焦距的镜头,快门速度应该相应地更快一些。
3. 使用稳定器或防抖模式许多现代相机都配备了内置的稳定器或防抖模式。
这些功能能够通过调节相机的震动来降低模糊照片的风险。
根据你使用的相机品牌和型号,你可以在设置菜单中寻找相应的功能,并根据需要进行调整。
4. 选择合适的镜头镜头的稳定性也是防抖的重要因素。
一般来说,带有光学防抖功能的镜头相对更稳定,能够提供更清晰的照片。
当你选择镜头时,可以考虑这个因素并咨询专业人士的建议。
5. 使用快门线或远程控制器在一些特殊情况下,手动按下快门可能会引起微小的相机晃动。
为了避免这种情况,你可以使用快门线或远程控制器来远程触发快门,从而消除手部触摸相机的可能性。
6. 利用支撑物在某些场景中,你可以利用支撑物来提高拍摄的稳定性。
例如,你可以将相机放在三脚架上,或者寻找一个稳固的表面将相机放置在上面。
这样可以最大限度地减少相机晃动的影响。
总结:相机防抖技巧在摄影中起着重要的作用,它能够帮助摄影爱好者拍摄到更清晰、更稳定的照片。
通过使用稳定的拍摄姿势、适当调整快门速度、使用相机自带的稳定器或防抖模式、选择稳定的镜头、使用快门线或远程控制器以及利用支撑物,我们能够有效降低由手部颤抖或镜头晃动引起的模糊照片的风险。
希望这些相机防抖技巧对你在摄影过程中有所帮助,让你拍摄到更出色的作品!。
防抖动算法 -回复

防抖动算法-回复防抖动算法是一种常见的优化策略,用于处理那些频繁触发的事件,例如窗口大小变化、鼠标移动等。
本文将详细介绍防抖动算法的概念、原理以及其实现方式。
1. 什么是防抖动算法?防抖动(Debounce)算法是一种提高程序性能的技术手段。
在实际开发中,我们会遇到一些高频触发的事件,如窗口大小改变、键盘输入等。
这些事件可能会引发不必要的计算或网络请求,导致性能下降。
防抖动算法就是用来解决这个问题的,它能确保在一个时间段内只执行一次操作。
2. 防抖动算法的原理是什么?防抖动算法的基本思想是:当事件被触发时,不立即执行相关操作,而是等待一段时间(称为“延迟时间”)。
如果在这段时间内,事件再次被触发,就重新开始计时。
只有当事件在一段连续的时间内没有被触发,才执行相关的操作。
这种做法有两个好处:- 减少不必要的计算和网络请求- 提高用户体验,避免页面闪烁3. 如何实现防抖动算法?防抖动算法的实现主要分为两种方式:同步版和异步版。
(1)同步版同步版的防抖动算法是最基础的版本,其核心思想是在每次事件触发时,设置一个定时器,在规定时间内清除之前的定时器并重新计时。
如果在这段时间内没有再次触发事件,就执行相关的操作。
以下是JavaScript实现的例子:javascriptfunction debounce(func, delay) {let timer = null;return function() {if (timer) clearTimeout(timer);timer = setTimeout(() => {func.apply(this, arguments);}, delay);}}在这个例子中,我们定义了一个函数`debounce`,接受两个参数:需要防抖动的函数`func`和延迟时间`delay`。
然后返回一个新的函数,这个函数内部会先检查是否存在定时器,如果有就清除。
然后重新设置定时器,在`delay`时间后执行`func`。
利用防抖技术消除抖动
利用防抖技术消除抖动防抖技术是一种常用的信号处理技术,用于消除因为机械振动或者其他干扰原因引起的抖动。
在许多领域,如机械工程、电子仪器等,抖动都是一个普遍存在的问题,对系统的精度和可靠性都会带来负面的影响。
利用防抖技术可以有效地减少抖动,从而提高系统的性能和可靠性。
一、什么是抖动抖动是指在测量、检测或者控制的过程中出现的不稳定现象。
抖动可以以不同的形式表现,如信号波动、机械部件震动等。
抖动常常由于外部干扰、传感器噪声或者系统不稳定性引起。
在一些对精度要求较高的应用中,抖动会导致测量错误、控制偏差等问题。
二、什么是防抖技术防抖技术是一种用于减少抖动影响的信号处理技术。
常见的防抖技术包括软件防抖和硬件防抖两种形式。
1. 软件防抖软件防抖是通过对信号进行滤波和处理来消除抖动。
常用的软件防抖方法包括中值滤波、均值滤波、滑动平均滤波等。
这些方法可以降低信号中的高频振荡成分,从而减少抖动。
2. 硬件防抖硬件防抖是通过在传感器、机械部件等实体硬件上进行设计和优化,来减少抖动。
常见的硬件防抖方法包括减震设计、机械补偿装置、传感器选择等。
硬件防抖通过改进物理结构和工艺,降低系统的敏感度和干扰程度,减少抖动的产生。
三、应用领域防抖技术在许多领域都有广泛的应用,包括但不限于以下几个方面:1. 机械工程在机械工程中,抖动是一个常见的问题。
例如,机械零件之间的间隙、摩擦带来的振动都会导致抖动。
利用防抖技术可以改善机械系统的精度和可靠性,减少零件磨损和故障率。
2. 电子仪器在电子仪器中,信号传感器常常受到抖动的干扰。
例如,摄像机拍摄的图像可能因为手部抖动而模糊,导航设备的定位精度可能受到振动的影响。
应用防抖技术可以提高图像的清晰度和定位的准确性。
3. 汽车电子在汽车电子系统中,防抖技术也是一个重要的应用领域。
例如,在车辆制动系统中,防抖技术可以减少因为路面不平或者制动器件松动而引起的抖动,提高制动效果和行车安全性。
四、总结利用防抖技术可以有效地减少抖动问题,提高系统的性能和可靠性。
opencv防抖实践及代码解析笔记

opencv防抖实践及代码解析笔记一、OpenCV防抖实践笔记:在图像处理中,防抖是一种常见的技术,可以通过平滑图像中的噪声或震动,使得图像更加清晰和稳定。
OpenCV是一个强大的开源计算机视觉库,提供了许多图像处理和计算机视觉算法。
本文将介绍OpenCV中防抖的实践及代码解析。
在OpenCV中,可以通过一些图像处理技术实现防抖,常用的方法包括平均滤波、中值滤波、高斯滤波等。
这些滤波算法能够有效地去除图像中的噪声,提升图像的质量和稳定性。
一种常用的防抖方法是平均滤波。
平均滤波是指将图像中的每个像素与其周围像素的平均值进行替换,从而实现去噪的目的。
在OpenCV中,可以使用cv2.blur函数实现平均滤波。
下面是一个简单的代码示例:```pythonimport cv2import numpy as np# 读取图像image = cv2.imread('image.jpg')# 平均滤波averaged = cv2.blur(image, (5, 5))# 显示结果cv2.imshow('Original', image)cv2.imshow('Averaged', averaged)cv2.waitKey(0)cv2.destroyAllWindows()```上述代码中,首先使用cv2.imread函数加载图像,然后使用cv2.blur函数对图像进行平均滤波。
其中,第二个参数(5, 5)表示滤波器的尺寸,即对每个像素周围5x5的区域进行平均。
最后,使用cv2.imshow函数显示原始图像和防抖后的图像。
除了平均滤波,中值滤波也是一种常用的防抖方法。
中值滤波是指将图像中每个像素的值替换为该像素周围邻域像素的中值,从而实现去除离群值和噪声的目的。
在OpenCV中,可以使用cv2.medianBlur函数实现中值滤波。
下面是一个简单的代码示例:```pythonimport cv2import numpy as np# 读取图像image = cv2.imread('image.jpg')# 中值滤波median = cv2.medianBlur(image, 5)# 显示结果cv2.imshow('Original', image)cv2.imshow('Median', median)cv2.waitKey(0)cv2.destroyAllWindows()```上述代码中,使用cv2.medianBlur函数对图像进行中值滤波。
5_按键防抖动电路设计

一、实验电路图、状态图、流程图、程序代码、仿真代码、仿真波形图(可以只写出核心功能代码,代码要有注释)
设计思路:
在第一个状态时,等待按键按下,一旦有按键按下(按键下降沿到来),便跳转到第二个状态,抖动滤除状态。
在第二个状态,有检测到高电平(上升沿),就会被认为是毛刺,进而返回第一个状态继续等待下降沿。
等毛刺被滤除后(计数满)则进入按下稳定状态。
在按下稳定状态,等待释放(上升沿),同按键按下的状态,再次滤除释放按键的抖动。
等抖动滤除后,恢复到第一个状态。
状态转移图:
程序代码:
译码器模块:
Modelsim测试代码:
Modelsim功能仿真波形图:。
按键功能实验报告总结(3篇)

第1篇一、实验背景按键作为电子设备中常见的输入装置,其功能丰富,应用广泛。
本实验旨在通过设计和实现一系列按键功能,加深对按键工作原理的理解,并提高电子设计实践能力。
二、实验目的1. 掌握按键的基本原理和电路设计方法。
2. 熟悉按键在不同应用场景下的功能实现。
3. 培养电子设计实践能力,提高问题解决能力。
三、实验内容1. 实验器材:51单片机最小核心电路、按键、LED灯、电阻、电容、面包板等。
2. 实验内容:(1)单按键控制LED灯闪烁(2)按键控制LED灯点亮与熄灭(3)按键控制LED灯亮度调节(4)按键实现数字时钟调整(5)按键实现多功能计数器(6)按键实现密码输入与验证四、实验步骤1. 根据实验要求,设计电路图,并选择合适的元器件。
2. 使用面包板搭建实验电路,包括单片机、按键、LED灯、电阻、电容等。
3. 编写程序,实现按键功能。
4. 对程序进行调试,确保按键功能正常。
5. 实验完成后,撰写实验报告。
五、实验结果与分析1. 单按键控制LED灯闪烁实验结果:按下按键,LED灯闪烁;松开按键,LED灯停止闪烁。
分析:本实验通过单片机定时器实现LED灯的闪烁。
当按键按下时,定时器开始计时;当定时器达到设定时间后,LED灯点亮;定时器继续计时,当达到设定时间后,LED灯熄灭。
如此循环,实现LED灯的闪烁。
2. 按键控制LED灯点亮与熄灭实验结果:按下按键,LED灯点亮;再次按下按键,LED灯熄灭。
分析:本实验通过单片机的I/O口控制LED灯的点亮与熄灭。
当按键按下时,单片机将I/O口置为高电平,LED灯点亮;当按键再次按下时,单片机将I/O口置为低电平,LED灯熄灭。
3. 按键控制LED灯亮度调节实验结果:按下按键,LED灯亮度逐渐增加;松开按键,LED灯亮度保持不变。
分析:本实验通过单片机的PWM(脉宽调制)功能实现LED灯亮度的调节。
当按键按下时,单片机调整PWM占空比,使LED灯亮度逐渐增加;松开按键后,PWM占空比保持不变,LED灯亮度保持不变。
防抖动算法 -回复
防抖动算法-回复防抖动算法(debounce algorithm)被广泛应用于计算机科学和工程领域,用于解决诸如用户界面交互、传感器数据处理等方面的问题。
该算法通过限制触发的频率,能够减少不必要的计算或操作,从而提高系统性能和用户体验。
本文将详细介绍防抖动算法的原理、实现方式以及应用场景,并通过示例代码进行解析。
一、原理防抖动算法的原理非常简单,它的核心思想是抑制触发事件的连续性。
当一个事件触发时,算法会设置一个定时器,在指定的时间间隔内,如果有连续的事件触发,则忽略前面的事件,只执行最后一次触发的事件。
具体来说,防抖动算法的工作流程如下:1. 设定一个时间间隔threshold,表示触发事件的最小间隔时间。
2. 当事件触发时,检查定时器是否已经设置。
若定时器已经设置,则取消之前的定时器。
3. 设置一个新的定时器,在threshold时间后触发事件。
若在threshold 时间内发生了其他的事件触发,重复第2步。
4. 当定时器触发时,执行事件逻辑。
通过以上步骤,防抖动算法可以有效地减少事件的触发次数,从而达到减少计算和操作的目的。
二、实现方式防抖动算法可以基于事件监听实现,也可以基于函数调用实现。
下面以JavaScript语言为例,分别介绍两种实现方式。
1. 基于事件监听的实现方式:javascriptfunction debounce(callback, threshold) {let timer;return function() {const args = arguments;clearTimeout(timer);timer = setTimeout(() => {callback.apply(this, args);}, threshold);};}使用示例const handleKeyPress = debounce(function(event) {console.log(event.key);}, 300);document.addEventListener('keypress', handleKeyPress);2. 基于函数调用的实现方式:javascriptfunction debounce(func, threshold) {let timer;return function() {const context = this;const args = arguments;function delayed() {func.apply(context, args);timer = null;}clearTimeout(timer);timer = setTimeout(delayed, threshold);};}使用示例function handleKeyPress(event) {console.log(event.key);}const debouncedHandleKeyPress = debounce(handleKeyPress, 300);document.addEventListener('keypress', debouncedHandleKeyPress);以上示例中,我们定义了一个名为debounce的函数,它接受一个回调函数和一个时间间隔threshold作为参数,返回一个新的函数。
AE中的画面稳定技巧与防抖效果应用
AE中的画面稳定技巧与防抖效果应用随着摄影和视频技术的不断发展,人们对于画面稳定性的要求也越来越高。
毕竟,谁都不想看到晃动不停、模糊不清的照片或视频。
在此背景下,Adobe After Effects(简称AE)等一系列的图像处理软件为我们提供了很多解决方案,其中包括画面稳定技巧和防抖效果的应用。
本文将详细介绍AE中的画面稳定技巧和防抖效果应用的步骤及方法。
一、画面稳定技巧1. 分析画面稳定性的需求在应用画面稳定技巧之前,首先需要明确画面稳定的需求。
是希望整个画面都保持稳定,还是只需将特定部分稳定。
具体需求将影响后续的操作步骤和效果选择。
2. 导入素材并创建合成将需要处理的素材导入AE,并在项目面板中右键点击创建新合成。
设置分辨率、帧速率和时长等参数,创建一个新的合成。
3. 运用稳定器效果在编辑区域中选中合成图层,在导航栏中选择"动画"-"稳定"-"可编辑的稳定器"。
在稳定器面板中,点击"分析",AE会自动分析画面的晃动情况。
4. 选择稳定效果根据前面分析的结果,可以在稳定器面板中选择合适的稳定效果。
如果是整个画面稳定,可以选择"全部稳定";如果只需稳定特定区域,可以选择"仅限于"并选择感兴趣区域。
5. 调整参数和观察结果通过调整稳定器面板中的参数,观察画面稳定效果。
常见的参数包括平滑度、应用比例等。
根据实际需求,进行适当的调整,直到达到满意的效果。
二、防抖效果应用1. 导入素材并创建合成同样地,先将需要处理的素材导入AE,并在项目面板中创建新合成。
2. 运用防抖效果在编辑区域中选中合成图层,在导航栏中选择"效果"-"视频效果"-"稳定图像"。
AE会自动应用一个初始的防抖效果。
3. 调整参数和观察结果通过调整防抖效果面板中的参数,观察画面的稳定效果。
前端的防抖节流和函数实现

前端的防抖节流和函数实现1.引言1.1 概述概述防抖和节流是前端开发中常用的优化技术,用于处理频繁触发的事件和函数。
在现代的网页应用中,用户的交互越来越多,包括点击、滚动、输入等操作都会触发相应的事件和函数。
然而,频繁触发事件和函数可能导致性能问题,影响用户的体验和网页的流畅度。
为了解决频繁触发带来的性能问题,防抖和节流技术应运而生。
二者均通过控制函数的执行频率来降低性能消耗,优化用户体验。
具体而言,防抖技术会在事件触发后延迟一定时间执行函数,若在延迟期间再次触发事件,会重新计时延迟。
而节流技术则会固定间隔时间执行函数,无论触发事件的频率有多高。
通过这样的处理方式,能够在不影响功能的前提下,减少函数的执行次数,提升页面的响应速度和流畅度。
本文将深入探讨防抖和节流的概念、作用以及实现方法。
在防抖部分,我们将介绍防抖的概念和作用,并详细讲解几种常见的防抖实现方式。
在节流部分,我们将介绍节流的概念和作用,并介绍几种常用的节流实现方法。
此外,本文还将研究函数的实现方式,包括函数的定义和特点,以及常见的函数实现方式。
通过学习本文,读者能够深入了解防抖和节流的原理和优点,掌握不同场景下的实现方法,并理解函数的定义和实现方式。
同时,我们也将探讨防抖节流技术在前端开发中的意义和应用,帮助读者更好地应用于实际的项目中,提升用户体验和网页性能。
在结论部分,我们将对防抖节流的优点进行总结,并讨论其在前端开发中的具体应用场景。
希望本文能够为读者提供有关前端防抖节流和函数实现的全面指导,帮助读者在实际项目中优化事件和函数处理,提升用户体验。
1.2文章结构1.2 文章结构本文将围绕前端的防抖和节流以及函数实现展开,主要分为以下几个部分:1. 引言:首先会对整篇文章进行引言介绍,包括对防抖和节流的概述、文章结构和目的的说明。
2. 正文:主要分为三个部分,分别是防抖、节流和函数实现。
每个部分都会深入介绍对应的概念、作用以及实现方法。
实现镜头稳定和防抖效果的Final Cut Pro技巧

实现镜头稳定和防抖效果的Final Cut Pro技巧Final Cut Pro是一款功能强大的视频编辑软件,为用户提供了多种工具和技巧来改善视频的质量和外观。
其中一个重要的技巧是实现镜头稳定和防抖效果。
在本篇文章中,我们将讨论如何使用Final Cut Pro 来实现这一效果。
镜头稳定是指通过减少镜头抖动来使视频看起来更稳定和平滑。
在实际拍摄中,由于手持相机或其他不稳定的因素,可能会出现镜头抖动的问题。
Final Cut Pro提供了内置的镜头稳定工具,使我们能够轻松解决这个问题。
首先,导入你想要编辑的视频素材到Final Cut Pro中。
然后,选择你想要应用镜头稳定效果的视频片段,并将其拖放到时间轴上。
接下来,选中片段,并在顶部的工具栏中选择“修复”选项卡。
在修复选项卡中,你将找到“镜头稳定器”工具。
点击它,并选择“分析并修复全部”选项。
Final Cut Pro将自动分析选定片段中的镜头抖动,并应用适当的稳定效果。
你可以通过调整“强度”滑块来控制镜头稳定的程度。
一般来说,增加强度会更好地减少抖动,但也可能导致画面出现某些畸变。
因此,建议你在应用稳定效果之后进行预览,以确保画面质量符合你的需求和期望。
另外,Final Cut Pro还提供了进一步优化镜头稳定效果的选项。
你可以通过点击“高级设置”按钮来访问这些选项。
在高级设置中,你可以调整像素偏移、镜头角度和缩放参数,以进一步细化稳定效果。
根据具体情况,你可能需要尝试不同的参数值来获得最佳的结果。
除了镜头稳定,Final Cut Pro还提供了防抖效果。
防抖是指在后期制作中通过软件处理来减少视频中的抖动。
虽然它不能完全替代镜头稳定,但在某些情况下,它可以有效减少视频中的抖动。
在Final Cut Pro中,应用防抖效果非常简单。
选择你想要应用防抖效果的视频片段,并在顶部的工具栏中选择“视频修复”选项卡。
在视频修复选项卡中,你将找到“防抖”工具。
说说防抖和节流的原理区别和应用
防抖和节流的原理区别和应用防抖的原理防抖是一种常用的前端性能优化技术,主要用于减少频繁触发的事件的执行次数。
当一个事件被连续触发多次时,防抖技术可以确保只有最后一次触发事件才会被执行。
防抖的原理是通过设置一个定时器,在事件触发后延迟一定时间执行事件处理函数。
如果在延迟时间内再次触发了该事件,就会清除前一个定时器,重新设置一个新的定时器。
如果在延迟时间内没有再次触发该事件,那么定时器会到期,执行事件处理函数。
防抖的目的是避免频繁触发事件导致不必要的资源浪费。
例如,在输入框中实时搜索时,如果用户连续输入多个字符,可以通过防抖技术来减少搜索请求的发送次数,提升搜索性能。
节流的原理与防抖相似,节流也是一种常用的前端性能优化技术,用于控制连续触发的事件的执行频率。
不同于防抖,节流技术会根据一定时间间隔执行事件处理函数,而不管事件是否还在持续触发。
节流的原理是通过设置一个定时间隔,在事件触发后立即执行事件处理函数,并在指定的时间间隔内禁止再次触发该事件。
只有等到时间间隔过去后,才能再次触发该事件。
节流的目的是控制事件的执行频率,避免过多的事件处理函数被执行。
例如,在窗口滚动或页面 resize 事件中,可以使用节流技术来限制事件处理函数的执行频率,减少不必要的处理。
防抖和节流的应用场景•防抖的应用场景:–输入框实时搜索:防止用户连续输入时频繁发送搜索请求,只在用户输入停止后一段时间再发送请求,减轻服务器压力。
–按钮点击避免重复提交:防止用户短时间内多次点击提交按钮导致数据异常或重复提交,只在最后一次点击后才执行提交操作。
–窗口调整事件:防止窗口调整期间连续触发 resize 事件,只在调整结束后执行相应的处理逻辑。
•节流的应用场景:–窗口滚动事件:减少频繁触发的滚动事件的处理次数,提升性能。
–页面 resize 事件:在窗口调整过程中,节流事件处理函数的执行,避免过多的 DOM 操作。
–鼠标移动事件:缩减连续触发的鼠标移动事件的处理频率,减少不必要的计算和渲染。
解析光学防抖技术 算法及控制器性能突破为关键
解析光学防抖技术算法及控制器性能突破为关键研究机构开发出具有最佳补偿效果的手抖动信号估测算法,以及运算负载低且易实作的模糊逻辑(Fuzzy Logic)控制器,可大幅提高手机镜头模块稳定度,并改善音圈马达的磁滞效应,将有助光学防抖技术扩大渗透手机市场。
光学防抖分两种技术图1 为具光学防抖功能之微型相机模块。
防手抖系统最具代表的技术为电子防手抖(Electronic Image Stabilizer, EIS)与光学防抖技术。
其中,电子防手抖技术利用图像处理的方式来防止影像模糊,电子防手抖效果取决于算法的设计与效率,系统不须增加额外的硬件,适合微型化设计,但通常必须牺牲影像的分辨率(或影像大小),此为其主要缺点。
图1影像传感器与光学防抖模块光学防抖技术又区分为传感器防手抖(Sensor-shift Optical Image Stabilization)与镜头防手抖(Lens-shift Optical Image Stabilization)两种(图2),光学防抖系统利用光学镜组(Lens)或影像传感器(Image Sensor)的移动来补偿使用者的手抖动,故不会牺牲影像的分辨率,大幅提升产品附加价值。
图2光学式防手抖系统示意图;(A)影像传感器移动之光学防抖系统;(B)镜头移动之光学防抖系统。
手抖动信号估测技术光学防抖技术需要额外致动器设计,因此主要关键技术包括控制器设计与用户手部振动信号估测器设计。
手抖动信号估测器算法,是利用智能手机搭载的MEMS 惯性传感器感测使用者拍摄时手部产生的晃动信号,经由闭回路控制系统驱动微型相机模块内部精密音圈马达驱动,以补偿使用者手部产生的晃动,避免拍摄影像产生模糊。
手抖动信号估测器包括惯性传感器(多轴陀螺仪及加速度计)与惯性传感信号处理算法设计。
工研院南分院已投入惯性信号估测技术开发多年,并成功运用于行人/行车惯性导航、光学防抖系统中,有相当丰硕的成果。
手抖动信号估测器利用陀螺仪组件感测到手抖动信号后,经由数字信号处理及积分运算后可得到颤抖角度信号,经实验量测分析后,。
防抖手柄的设计及控制研究

防抖手柄的设计及控制研究作为一名游戏爱好者,我们有时需要在游戏中精准、快速地操作手柄以获得最佳游戏体验,但是常常会遇到手柄晃动、反应迟缓、指令滞后等问题。
这些问题的根源在于手柄的防抖设计不够优良,导致操作不能达到理想状态。
因此,在本文中,我们将探讨防抖手柄的设计及控制研究,为游戏爱好者创造更佳的游戏体验。
1. 防抖手柄设计的可行性手柄防抖设计虽然不是一个常见的需求,但是在现代游戏市场中确实需要这样一种设计。
首先,手柄防抖设计可以防止手握手柄时手部震动的影响,从而精准、快速地操作游戏。
其次,手柄防抖设计也可以使手柄的使用寿命更长,避免由于震动而导致手柄内部零部件损坏,减少维修或更换的成本,为用户节省资金。
2. 防抖手柄的设计方案针对手柄防抖设计,我们可以从以下方面入手:1)选取优质的材料手柄的外壳和内部零部件应该选取质量优良的材料,以保证手柄的稳定性和耐用性。
同时,材料的选择也会影响到手柄的重量、形状以及手感等使用体验。
2)使用减震材料减震材料可以有效地吸收震动,降低手部震动对操作的影响。
在手柄设计中添加一层减震材料,可以大大提高手柄的防抖能力。
3)加入防抖芯片为了进一步提高手柄的反应速度和精准度,可以在手柄内部加入一些电路芯片,这些芯片能够对震动进行调控和处理,保证手柄的稳定性和可靠性。
例如,可以使用数字信号处理器 (DSP) 或复杂的算法,来进行实时降噪和滤波处理。
3. 防抖手柄的控制研究除了设计手柄防抖解决方案,还需要在手柄的控制器上加入相应的控制策略来实现防抖。
以下是几种实现手柄防抖控制的常用方法:1)软件滤波软件滤波是防抖手柄最常用的控制策略之一。
它通过设计一些算法,将手柄中的不稳定数据进行滤波处理,从而保证指令的精准度和稳定性。
常见的滤波算法包括低通滤波、中通滤波、高通滤波等等,它们的实现方式不同,但都可以有效地降低手部震动带来的影响。
2)硬件滤波硬件滤波是利用硬件电路的特性来实现滤波功能,与软件滤波相比,它具有更高的实时性和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光学防抖系统由传感器、微处理器、补偿镜片控制组、驱动控制部分组成,镜头内传感器将检测到的镜头抖动及位移信号
传至微处理器计算需要补偿的位移量,然后通过补偿镜片组根据镜头抖动方向及位移量加以补偿,从而有效克服因相机振动
产生的影像模糊。
优:补正效果好;
劣:对于「上下」移动防抖有效,但「左右」摇晃似乎不太行!技术复杂,防抖镜头价格昂贵。
3.机身防振橡胶
D-EIS
Hitachi
宽荧幕电子防振
感光器(CCD/CMOS)防抖技术(机身防抖)
CCD防抖是将感光元器件CCD(或CMOS)放在一个可移动支架上来通过传感器感知相机抖动,由微处理器计算相应移
动量并驱动CCD进行相应移动以达到防抖目的。
优:补正效果好,所有匹配镜头都能实现防抖功能;
劣:技术复杂,价格较贵。由于对应高精度结构要求使得相应的制造有一定难度并增加了机身成本。
厂家
技术
级数
技术缩写
Canon
Image Stabilizer
3
IS
Nikon
Vibration Reduction
3
VR
Leica
Mega Optical Image Stabilizer
MEGA OIS
Sigma
Optical Stabilizer
2
OS
电子式防抖技术
电子防抖通过提高感光度(HighISO)来提高快门速度(减低曝光时间),使快门速度超过安全快门来避免抖动。这种方法变化了快门速度,不仅能改善相机方面的抖动,也能对移动的物体进行更好的捕捉。
优:技术比较简单,价格便宜;
劣:噪音的增加对画质有较大影响,降低了CCD利用率,牺牲了CCD的Pixel值;其次,对静态图像的帮助不大。
厂家
技术
级数
技术缩写
Nikon
Best-Shot Selhot
Panasonic
Dual Digital Electronic Image Stabilization
厂家
技术
级数
技术缩写
Minolta
Anti-Shake
3
AS
数码(DV/DC)产品防抖技术:
Others :
1.纯机械性弹簧系统来稳定影响(CarlZeiss20x60s Stabilizer)
2.平稳光学防抖系统(Sony PJ760E):与以往的光学防抖有所不同,并不是单纯通过镜头组内镜片的移动完成防抖。而是在机身内壁安装了由两个电动马达组成的机械结构,镜头组悬挂在机械结构中。移动或者长焦拍摄的时候,镜头组通过电动马达的调节与镜片之间的补偿共同完成防抖操作。