实验三 MATLAB图像处理基本操作及摄像机标定(DLT)
数字图像处理及MATLAB实现实验三——图像基本运算
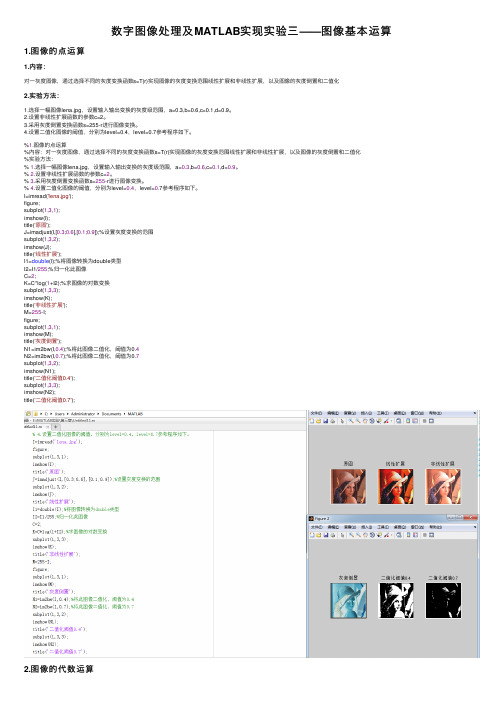
数字图像处理及MATLAB实现实验三——图像基本运算1.图像的点运算1.内容:对⼀灰度图像,通过选择不同的灰度变换函数s=T(r)实现图像的灰度变换范围线性扩展和⾮线性扩展,以及图像的灰度倒置和⼆值化2.实验⽅法:1.选择⼀幅图像lena.jpg,设置输⼊输出变换的灰度级范围,a=0.3,b=0.6,c=0.1,d=0.9。
2.设置⾮线性扩展函数的参数c=2。
3.采⽤灰度倒置变换函数s=255-r进⾏图像变换。
4.设置⼆值化图像的阈值,分别为level=0.4,level=0.7参考程序如下。
%1.图像的点运算%内容:对⼀灰度图像,通过选择不同的灰度变换函数s=T(r)实现图像的灰度变换范围线性扩展和⾮线性扩展,以及图像的灰度倒置和⼆值化%实验⽅法:% 1.选择⼀幅图像lena.jpg,设置输⼊输出变换的灰度级范围,a=0.3,b=0.6,c=0.1,d=0.9。
% 2.设置⾮线性扩展函数的参数c=2。
% 3.采⽤灰度倒置变换函数s=255-r进⾏图像变换。
% 4.设置⼆值化图像的阈值,分别为level=0.4,level=0.7参考程序如下。
I=imread('lena.jpg');figure;subplot(1,3,1);imshow(I);title('原图');J=imadjust(I,[0.3;0.6],[0.1;0.9]);%设置灰度变换的范围subplot(1,3,2);imshow(J);title('线性扩展');I1=double(I);%将图像转换为double类型I2=I1/255;%归⼀化此图像C=2;K=C*log(1+I2);%求图像的对数变换subplot(1,3,3);imshow(K);title('⾮线性扩展');M=255-I;figure;subplot(1,3,1);imshow(M);title('灰度倒置');N1=im2bw(I,0.4);%将此图像⼆值化,阈值为0.4N2=im2bw(I,0.7);%将此图像⼆值化,阈值为0.7subplot(1,3,2);imshow(N1);title('⼆值化阈值0.4');subplot(1,3,3);imshow(N2);title('⼆值化阈值0.7');2.图像的代数运算内容:采⽤正确的图像代数运算⽅法,分别实现图像图像叠加,混合图像的分离和图像的局部显⽰效果1.选取两幅⼤⼩⼀样的灰度图像iena.jpg和rice.jpg,将两幅图像进⾏加法运算,结果如图。
Matlab摄像机标定+畸变校正

Matlab摄像机标定+畸变校正博客转载⾃:本⽂⽬的在于记录如何使⽤MATLAB做摄像机标定,并通过opencv进⾏校正后的显⽰。
⾸先关于校正的基本知识通过OpenCV官⽹的介绍即可简单了解:对于摄像机我们所关⼼的主要参数为摄像机内参,以及⼏个畸变系数。
上⾯的连接中后半部分也给了如何标定,然⽽OpenCV⾃带的标定程序稍显繁琐。
因⽽在本⽂中我主推使⽤MATLAB的⼯具箱。
下⾯让我们开始标定过程。
标定板标定的最开始阶段最需要的肯定是标定板。
两种⽅法,直接从opencv官⽹上能下载到:⽅法⼆:逼格满满(MATLAB)J = (checkerboard(300,4,5)>0.5);figure, imshow(J);采集数据那么有了棋盘格之后⾃然是需要进⾏照⽚了。
不多说,直接上程序。
按q键即可保存图像,尽量把镜头的各个⾓度都覆盖好。
#include "opencv2/opencv.hpp"#include <string>#include <iostream>using namespace cv;using namespace std;int main(){VideoCapture inputVideo(0);//inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 320);//inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 240);if (!inputVideo.isOpened()){cout << "Could not open the input video " << endl;return -1;}Mat frame;string imgname;int f = 1;while (1) //Show the image captured in the window and repeat{inputVideo >> frame; // readif (frame.empty()) break; // check if at endimshow("Camera", frame);char key = waitKey(1);if (key == 27)break;if (key == 'q' || key == 'Q'){imgname = to_string(f++) + ".jpg";imwrite(imgname, frame);}}cout << "Finished writing" << endl;return0;}保存⼤约15到20张即可。
使用Matlab进行图像处理的基本步骤
使用Matlab进行图像处理的基本步骤引言:随着计算机技术的迅猛发展,图像处理技术在各个领域得到广泛应用。
而Matlab作为一种功能强大的数学软件,也被广泛应用于图像处理领域。
本文将介绍使用Matlab进行图像处理的基本步骤,以帮助读者更好地理解和运用这一工具。
一、图像的读取与显示在进行图像处理之前,我们首先需要将图像读入Matlab中。
Matlab提供了imread函数来读取图像,并将读取的图像存储为矩阵形式。
通过imshow函数,我们可以将读取的图像显示出来,以便进一步的处理。
二、图像的基本操作在图像处理过程中,我们通常需要对图像进行一些基本的操作,比如调整图像的大小、旋转图像、图像翻转等。
Matlab提供了一系列的函数来实现这些操作。
例如,imresize函数可以调整图像的大小;imrotate函数可以用来旋转图像;flipud和fliplr函数可以进行图像的垂直和水平翻转。
三、图像的滤波处理图像的滤波处理是图像处理中非常重要的一部分。
通过滤波处理,我们可以去噪、增强图像的细节、平滑图像等。
Matlab提供了一系列的滤波函数,比如均值滤波、中值滤波、高斯滤波等。
我们可以根据实际需求选择适合的滤波方法来对图像进行处理。
四、图像的灰度转换和二值化图像的灰度转换和二值化是图像处理中经常用到的技术。
通过对图像进行灰度转换,我们可以将彩色图像转换为灰度图像,这样可以降低图像处理的复杂性。
而通过对灰度图像进行二值化处理,我们可以将图像转换为黑白图像,以便进行一些特定的处理。
Matlab提供了rgb2gray函数来实现灰度转换,同时也提供了一系列的二值化函数,比如im2bw函数。
五、图像的特征提取在进行图像处理的过程中,我们经常需要从图像中提取一些特征信息,以便进行后续的分析。
Matlab提供了一系列的特征提取函数,比如corner函数可以用来检测图像的角点,regionprops函数可以用来分析图像的区域属性等。
相机标定方法 matlab

相机标定方法 matlab相机标定是计算机视觉中的重要部分之一,它是通过测量图像上的物体点和其在相机坐标系下对应的点坐标,来估算相机内部参数和外部参数的过程。
相机内部参数通常包括焦距、主点位置和畸变参数等,它们决定了图像中的物体大小和位置。
相机外部参数包括相机的旋转和平移参数,它们决定了物体在相机坐标系下的坐标。
在 MATLAB 中,相机标定是通过图像处理工具箱中的“camera calibration”函数实现的。
在执行相机标定之前,需要准备一组称为标定板的物体,并在不同位置和姿态下拍摄多个图像。
标定板可以是长方形或正方形的棋盘格,也可以是自定义形状的物体,但是必须有已知的三维坐标和相应的二维坐标对。
以下是一个基本的相机标定流程,详细介绍了如何使用 MATLAB 实现相机标定。
1. 准备标定板需要准备一个标定板。
标定板可以是一个黑白棋盘格或自定义形状的物体。
在这里,我们将使用一个 9x7 的黑白棋盘格。
2. 采集标定图像接下来,需要拍摄多个标定图像,并记录标定板在每个图像中的位置和姿态。
对于每个图像,需要至少拍摄 10 张,以确保图像的质量和特征的稳定性。
可以使用不同的相机设置,例如不同的焦距、光圈和曝光时间等,来捕捉标定板的不同姿态。
3. 读取图像和标定板角点在 MATLAB 中,可以使用“imageDatastore”函数读取标定图像并创建一个图像数据存储对象。
接下来,可以使用“detectCheckerboardPoints”函数来检测标定板上的角点。
这个函数会返回一个 Nx2 的矩阵,其中 N 是标定板上检测到的角点数。
4. 定义标定板上角点的空间坐标现在需要定义标定板上角点的空间坐标。
这些坐标可以使用“generateCheckerboardPoints”函数自动生成。
该函数会返回一个 Nx3 的矩阵,其中N 是标定板上的角点数,每一行代表一个角点的空间坐标。
5. 进行相机标定用于相机标定的主要函数是“cameraCalibration”函数。
实验三MATLAB图像处理基本操作及摄像机标定(DLT)
实验三 Matlab图像处理基本操作及摄像机标定(D L T)1、实验目的通过应用Matlab的图像处理基本函数,学习图像处理中的一些基础操作和处理。
理解摄像机标定(DLT)方法的原理,并利用程序实现摄像机内参数和外参数的估计。
2、实验内容:1)读取一幅图像并显示。
2)检查内存(数组)中的图像。
3)实现图像直方图均衡化。
4)读取图像中像素点的坐标值。
5)保存图像。
6)检查新生成文件的信息。
7)使用阈值操作将图像转换为二值图像。
8)根据RGB图像创建一幅灰度图像。
9)调节图像的对比度。
10)在同一个窗口内显示两幅图像。
11)掌握matlab命令及函数,获取标定块图像的特征点坐标。
12)根据摄像机标定(DLT)方法原理,编写Matlab程序,估计摄像机内参数和外参数。
3、实验要求:1)选取一幅图像,根据实验内容1)—10)给出结果。
2)根据给定的标定块图像及实验内容11),12)进行编程实验。
3)书写实验报告4、实验设备1)微机。
2)Matlab软件。
5、实验原理DLT变换:Abdal-Aziz和Karara于70年代初提出了直接线性变换像机定标的方法,他们从摄影测量学的角度深入的研究了像机图像和环境物体之间的关系,建立了像机成像几何的线性模型,这种线性模型参数的估计完全可以由线性方程的求解来实现。
直接线性变换是将像点和物点的成像几何关系在齐次坐标下写成透视投影矩阵的形式:其中 为图像坐标系下的点的齐次坐标, 为世界坐标系下的空间点的欧氏坐标, P 为3*4的透视投影矩阵, 为未知尺度因子。
消去S ,可以得到方程组:当已知N 个空间点和对应的图像上的点时,可以得到一个含有2*N 个方程的方程组:其中A 为(2N*12)的矩阵, L 为透视投影矩阵元素组成的向量:像机定标的任务就是寻找合适的L ,使得为 最小,即给出约束:L ‘为L 的前11个元素组成的向量, C 为A 前11列组成的矩阵, B 为A 前12列组成的向量。
Matlab数字图像处理实验指导书.

数字图像处理实验指导书赵泉华请各位同学在考试之前上交以下4个实验指导书实验一 MATLAB图像处理基本操作一、实验目的与要求1.熟悉及掌握在MATLAB 中能够处理哪些格式图像。
2.熟练掌握在MATLAB 中如何读取图像。
3.掌握如何利用MATLAB 来获取图像的大小、颜色、高度、宽度等等相关信息。
4.掌握如何在MATLAB 中按照指定要求存储一幅图像的方法。
5.图像间如何转化。
二、实验原理及知识点1、数字图像的表示和类别一幅图像可以被定义为一个二维函数f(x,y,其中x 和y 是空间(平面坐标,f 在任何坐标处(x,y处的振幅称为图像在该点的亮度。
灰度是用来表示黑白图像亮度的一个术语,而彩色图像是由单个二维图像组合形成的。
例如,在RGB 彩色系统中,一幅彩色图像是由三幅独立的分量图像(红、绿、蓝组成的。
因此,许多为黑白图像处理开发的技术适用于彩色图像处理,方法是分别处理三副独立的分量图像即可。
图像关于x 和y 坐标以及振幅连续。
要将这样的一幅图像转化为数字形式,就要求数字化坐标和振幅。
将坐标值数字化成为取样;将振幅数字化成为量化。
采样和量化的过程如图1所示。
因此,当f 的x 、y 分量和振幅都是有限且离散的量时,称该图像为数字图像。
作为MATLAB 基本数据类型的数值数组本身十分适于表达图像,矩阵的元素和图像的像素之间有着十分自然的对应关系。
图1 图像的采样和量化根据图像数据矩阵解释方法的不同,MA TLAB 把其处理为4类:亮度图像(Intensity images二值图像(Binary images索引图像(Indexed imagesRGB 图像(RGB images(1 亮度图像一幅亮度图像是一个数据矩阵,其归一化的取值表示亮度。
若亮度图像的像素都是uint8类或uint16类,则它们的整数值范围分别是[0,255]和[0,65536]。
若图像是double 类,则像素取值就是浮点数。
使用Matlab技术进行图像处理的基本步骤

使用Matlab技术进行图像处理的基本步骤使用Matlab进行图像处理的基本步骤在数字时代,图像处理成为了一个热门的话题,越来越多的人开始使用计算机进行图像处理。
在众多图像处理软件中,Matlab无疑是最受欢迎的之一。
它不仅提供了强大的图像处理功能,还提供了友好的用户界面,使得图像处理变得更加简单。
本文将介绍使用Matlab进行图像处理的基本步骤。
第一步:读入图像图像处理的第一步是读入待处理的图像。
Matlab提供了多种读取图像文件的函数,最常用的是imread函数。
其中,imread函数需要传入图像文件的路径作为参数,然后返回一个表示图像的矩阵。
例如,我们可以使用以下代码读入一张名为"image.jpg"的图像:```Matlabimage = imread('image.jpg');```第二步:显示图像读入图像后,我们通常需要将其显示在屏幕上,以便进一步的处理。
Matlab提供了imshow函数用于显示图像。
以下是显示图像的示例代码:```Matlabimshow(image);```通过调用imshow函数,Matlab会自动弹出一个窗口,将图像显示在其中。
第三步:图像预处理在进行进一步的图像处理之前,通常需要对图像进行一些预处理操作,以使后续处理更加准确。
常见的图像预处理操作包括灰度化、去噪和平滑等。
下面我们以灰度化为例进行说明。
灰度化是指将彩色图像转化为灰度图像,使得每个像素只有一个灰度值。
在Matlab中,我们可以使用rgb2gray函数将彩色图像转化为灰度图像。
以下是灰度化的示例代码:```Matlabgray_image = rgb2gray(image);```通过调用rgb2gray函数,我们可以将图像image转化为灰度图像,并保存在gray_image中。
第四步:图像处理经过预处理后,我们可以开始进行具体的图像处理操作。
Matlab提供了丰富的图像处理函数,涵盖了图像增强、图像滤波、边缘检测等多个领域。
Matlab中的图像配准和摄像机标定方法

Matlab中的图像配准和摄像机标定方法摄影和图像处理是现代科学技术中的重要组成部分。
无论是计算机视觉、机器人技术还是虚拟现实,图像配准和摄像机标定是其中不可或缺的环节。
本文将探讨Matlab中的图像配准和摄像机标定方法,并探讨它们的应用及意义。
图像配准是指通过空间变换将一个或多个图像对准,在同一坐标系下进行比较、融合或者进一步处理。
对于各种图像处理应用,如图像拼接、医学影像分析、人脸识别等都涉及到图像配准。
Matlab提供了一系列函数和工具箱来帮助用户进行图像配准。
图像配准的一个常见任务是图像拼接。
当存在多幅具有重叠区域的图像时,将它们无缝拼接成一幅大图像是很有意义的。
Matlab中的`imregister`函数可以实现图像的配准和拼接。
其原理是通过计算两幅图像之间的相似度来确定空间变换的参数。
具体来说,可以使用比较两图像之间的亮度、颜色、纹理等特征的方法来计算相似度,并通过优化方法寻找最佳的空间变换。
通过该函数,可以实现多幅图像的拼接,从而获得更大视野的图像。
图像拼接在地理信息系统、遥感等领域具有广泛的应用。
另一个重要的图像配准任务是医学影像分析。
在医学领域,常常需要对多幅不同时间、不同成像设备下的医学影像进行配准。
这种配准可以帮助医生实现精确的对比,从而提升诊断效果。
Matlab中的`imregtform`函数可以用于医学影像的配准。
该函数可以根据基准图像和待配准图像之间的特征点进行匹配,并计算出相应的空间变换矩阵。
这些变换矩阵可以用于将待配准图像变换到基准图像的坐标系下。
医学影像配准在疾病筛查、手术导航等方面具有重要的作用。
除了图像配准,摄像机标定也是计算机视觉领域中的关键问题。
摄像机标定是通过测量和计算相机的内外参数,来校正图像中的畸变,从而获得更加准确的图像信息。
Matlab提供了`cameraCalibrator`工具箱,可以帮助用户进行摄像机标定。
其原理是通过在标定板上放置一系列已知位置的标定点,并使用相机拍摄这些标定板,根据标定点的图像坐标和实际世界坐标的对应关系,计算摄像机的内外参数。
Matlab中的相机标定与三维重建方法
Matlab中的相机标定与三维重建方法相机标定和三维重建是计算机视觉领域中非常重要的技术,可以广泛应用于机器人导航、虚拟现实、增强现实等领域。
Matlab作为一种功能强大的科学计算软件,提供了丰富的图像处理和计算机视觉工具箱,可以方便地实现相机标定和三维重建。
1. 相机标定方法在进行相机标定之前,我们首先需要了解相机的内外参数。
相机的内参数包括焦距、主点坐标、像素大小等,而外参数则包括相机的位置和姿态。
标定的目的就是通过一组已知的特征点对相机的内外参数进行估计。
在Matlab中,可以使用相机标定工具箱进行相机标定。
这个工具箱提供了多种标定方法,包括基于平面模型的标定方法、基于球面模型的标定方法、基于立体标定方法等。
其中最常用的是基于平面模型的标定方法,即利用多个平面上的特征点进行标定。
在标定过程中,我们需要采集一系列的图像,对每张图像进行角点检测,并记录每个角点的像素坐标。
然后,通过最小二乘法或优化算法估计相机的内外参数。
在Matlab中,可以使用函数calibrateCamera来完成相机标定,该函数会自动计算相机的内外参数,并给出标定结果的评估指标。
2. 三维重建方法相机标定完成后,我们可以利用标定的结果对图像进行三维重建。
三维重建的目的是通过多个视角下的图像来恢复物体的三维形状和位置。
在Matlab中,可以使用视觉几何工具箱进行三维重建。
该工具箱提供了多种三维重建算法,包括三角剖分法、立体视觉法、稀疏点云法等。
其中最常用的是稀疏点云法,即通过对特征点进行匹配,估计它们在三维空间中的位置。
在三维重建过程中,我们首先需要对多个视角下的图像进行特征提取和匹配。
然后,通过三角测量或最小二乘法估计特征点在三维空间中的位置。
最后,可以使用点云可视化工具将估计的三维点云进行可视化。
3. 实例应用相机标定和三维重建在很多领域都有广泛的应用。
例如,在机器人导航中,我们可以利用相机标定和三维重建来估计机器人的位置和周围环境的三维形状,从而实现自主导航。
matlab图像处理基础实验,数字图像处理实验报告Matlab图像处理基础

matlab图像处理基础实验,数字图像处理实验报告Matlab图像处理基础《数字图像处理实验报告 Matlab图像处理基础》由会员分享,可在线阅读,更多相关《数字图像处理实验报告 Matlab图像处理基础(27页珍藏版)》请在⼈⼈⽂库⽹上搜索。
1、院系:计算机科学学院专业:计算机科学和技术年级: 2012级课程名称:数字图像处理组号:姓名(学号):指导教师:⾼志荣2015年5⽉25⽇学年2012年度班号1学号专业计算机科学和技术姓名实验名称Matlab图像处理的基础实验室204果实检查眼睛的和要拜托了⼀、实验⽬的:(熟悉Matlab开发环境(掌握Matlab中数字图像读取、显⽰、保存的基本⽅法的使⽤(3)把握不同种类的数字图像间的变换⽅法(4)加深空间分辨率和灰度分辨率对图像显⽰效果的影响(熟悉Matlab中的傅⽴叶变换(基于Matlab的数字图像程序设计⽅法⼆、实验内容:(在Matlab中使⽤imread函数读取1张RGB图像(从实验。
2、素材中任意选择),调查该图像的尺⼨、数据类型信息,将该图像转换为灰度图像并以bmp形式保存。
(使⽤imread函数读取1张灰度图像(从实验素材中任意选择),分别进⾏2个采样、4个采样和8个采样,以相同⼤⼩显⽰原图像和采样后的3张结果图像,⽐较空间分辨率对图像显⽰效果的影响。
(使⽤imread函数读取1张灰度图像(从实验素材中任意选择),分别以5、10、50的间隔将该灰度再次均匀量化,以相同⼤⼩显⽰原图像和再量化后的3张结果图像,⽐较灰度分辨率对图像显⽰效果的影响。
(4)读取⼀张灰度图像,对其进⾏快速傅⽴叶变换,在同⼀窗⼝中显⽰原始的空间区域图像和变换后的频域图像。
三、实验要求:(1)关于具体的。
3、实验内容,分别给出命令(或m⽂书)、输出结果、成因分析、经验总结。
(2)所有⽣成的图像或m⽂件,均须命名。
例如,图n :描述图像信息的*.m⽂件:描述⽂件信息。
相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)

相机标定简介与MatLab相机标定⼯具箱的使⽤(未涉及原理公式推导)⼀、相机标定的⽬的确定空间物体表⾯某点的三维⼏何位置与其在图像中对应点之间的相互关系,建⽴摄像机成像的⼏何模型,这些⼏何模型参数就是摄像机参数。
⼆、通⽤摄像机模型世界坐标系、摄像机坐标系和像平⾯坐标系都不重合。
同时考虑两个因素:(1)摄像机镜头的畸变误差,像平⾯上的成像位置与线性变换公式计算的透视变换投影结果有偏差;(2)计算机中图像坐标单位是存储器中离散像素的个数,所以像平⾯上的连续坐标还需取整转换。
摄像机参数l摄像机内部参数(Intrinsic Parameters)摄像机坐标和理想坐标系之间的关系图像坐标系、摄像机坐标系The list of internal parameters:Focal length(焦距): The focal length in pixels is stored in the 2x1 vector fc.Principal point(主点): The principal point coordinates are stored in the 2x1 vector cc.Skew coefficient (偏斜系数): The skew coefficient defining the angle between the x and y pixel axes is stored in thescalar alpha_c.Distortions (畸变): The image distortion coefficients (radial and tangential distortions) are stored in the 5x1 vector kc.l 摄像机外部参数 (Extrinsic Parameters)摄像机在世界坐标系⾥的位置和⽅向摄像机坐标系、世界坐标系主要包括:旋转矩阵 R 的9个参数和平移矩阵的3个参数。
matlab相机标定流程
matlab相机标定流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!相机标定是计算机视觉领域中重要的基础工作,其目的是通过一系列的数学过程估计相机的内参(内在参数)和外参(外在参数)。
matlab相机标定过程
matlab相机标定过程相机标定是计算机视觉领域中一项非常重要的技术。
它是指通过使用已知的特征点对相机进行标定,以便计算图像中某一点的真实位置。
在matlab中,相机标定的过程可以分为以下几个步骤:1. 特征点提取首先,我们需要在一组图片中提取出可以使用的特征点。
这些特征点通常是指具有稳定性和表征性等特点的点,例如边缘和角点等。
2. 特征点匹配在提取出特征点后,我们需要将这些特征点进行匹配。
我们可以使用一些特征匹配算法来实现这个过程,例如SIFT和SURF等算法。
3. 相机参数计算在完成了特征点匹配后,我们可以开始计算相机的内部参数和外部参数。
在matlab中,我们可以使用相机标定工具箱来实现这个过程。
该工具箱包含了多个相机标定模型,例如针孔模型、方位模型和宽角模型等。
4. 相机校正完成相机参数计算后,我们需要使用相机校正来优化相机的参数。
相机校正通常分为两种方法:单应性矩阵校正和直线校正。
在matlab中,我们可以使用相机标定工具箱中的cv.calibrateCamera2函数来实现相机校正。
5. 评估和验证最后,我们需要评估和验证相机标定的结果。
我们可以使用相机标定工具箱中的cv.evaluateCameraMatrix函数来评估相机的标定精度,并使用cv.undistort函数将输入图像与校正后的图像进行比较。
总结matlab中的相机标定过程可以帮助我们计算相机的内部参数和外部参数,以便计算图像中某一点的真实位置。
在执行相机标定时,我们需要完成特征点提取、特征点匹配、相机参数计算、相机校正以及评估和验证等几个步骤。
通过这些步骤,我们可以得出准确的相机标定结果,为后续的计算机视觉任务提供有力的支持。
MATLAB图像处理命令及图形基本操作实验报告

实验(一)常用MATLAB图像处理命令及图形基本操作
end
end
end
for i=1:m
for j=1:n
out(i,j,1)=R(i,j);
% imshow(out)
out(i,j,2)=G(i,j);
out(i,j,3)=B(i,j);
end
end
out=out/256;
figure(1),imshow(out)
%imshow(out)
size(out)
imwrite(out,'PseudoColor.tiff');
end
4、读入一幅RGB图像,变换为灰度图像和二值图像,并在同一个窗口内分成三个子窗口来分别显示RGB图像和灰度图像,注上文字标题。
RGB=imread('f:\1.jpg')
gray = rgb2gray(RGB)
I = im2bw(RGB,0.5)
subplot(3,1,1);imshow(a);title('原图像');
subplot(3,1,2);imshow(i);title('灰度图像');colormap(gray);
subplot(3,1,3);imshow(I);title('二值图像');
实验结果如图所示:
四、实验总结:
Imread 是读入文件的操作代码,subplot是将多个图画到一个平面上的工具本次实验在老师的带领下熟悉了matlab软件的具体操作
通过书写代码,操作程序实现了灰度图像转换为伪彩色图像;
通过书写代码实现了读入一幅RGB图像,并将其变换为灰度图像和二值图像,然后在同一个窗口中显示RGB图像和灰度图像。
使用Matlab进行标定与定位的技巧

使用Matlab进行标定与定位的技巧引言:随着计算机技术的不断进步,标定与定位在现代科学研究与工程应用中变得越来越重要。
而Matlab作为一种广泛应用于科学计算的工具,被广泛应用于标定与定位的研究与开发中。
本文将介绍使用Matlab进行标定与定位的技巧,包括标定理论和方法、定位算法与模型等。
一、标定理论与方法1.1 相机标定相机标定是进行摄像机内外参数确定和畸变纠正的过程。
在Matlab中,可以使用Camera Calibration Toolbox进行相机标定操作。
首先,需要准备一些用于标定的图像,这些图像中应包含已知参数(例如标定板大小和格点数)的标定板。
然后,在Matlab中加载图像数据,使用标定板图像来标定相机并求解相机内外参数。
1.2 IMU标定惯性测量单元(IMU)通常包括加速度计和陀螺仪等多种传感器。
IMU标定的目的是确定IMU的误差模型,以便在后续的定位中进行误差补偿。
在Matlab中,可以使用传感器标定和估计工具箱进行IMU标定操作。
首先,需要设计一套标定实验,包括旋转和加速度等多个运动过程。
然后,使用这些实验数据来标定IMU的误差模型。
二、定位算法与模型2.1 基于测距的定位基于测距的定位是通过测量到达定位节点的信号传播时间或信号强度等信息来实现的。
在Matlab中,可以使用距离测量数据进行多边定位或三边定位。
多边定位是通过测量到多个定位节点的距离信息来确定目标位置,可以使用最小二乘法等进行求解。
三边定位是通过测量到三个定位节点的距离信息来确定目标位置,可以使用三角测量法进行求解。
2.2 基于惯性导航的定位惯性导航是利用IMU等传感器测量物体的加速度和角速度等信息进行定位和导航的方法。
在Matlab中,可以使用十字光束法进行惯性导航定位。
首先,需要根据IMU数据求解出物体的位置、速度和姿态等信息。
然后,通过十字光束法计算出相对定位误差,从而实现精确定位。
2.3 基于地标的定位基于地标的定位是通过识别已知地标进行定位的方法。
matlab摄像机标定实验报告

摄像机标定实验报告一、实验任务使用工业摄像机拍摄9张标定图片,利用matlab中Camera Calibration Toolbox对摄像机进行标定。
二、实验原理针孔摄像机模型图1 摄像机针孔模型成像摄像机采集图像原理如图1。
物体上发出的光线投射到图像平面,仿佛所有的光线都经过针孔平面上的针孔点,垂直于针孔平面过针孔点的直线为光轴,从针孔到图像平面的距离就是焦距,在图中,摄像机焦距f,物体到摄像机的距离为Z,物体长S,物体在图像上的长度为s。
物体光线、光轴与物体之间组成相似三角形,得到这样的关系−s/f=S/Z。
图2 针孔模型图像平面一针孔点为中心旋转180°把图像平面以针孔点为中心旋转180°。
物体和图像在针孔平面的一边,仿佛所有光线从物体走到图像平面成像的对应点,最后汇集到一点,这个点定义为投影中心[33]。
图3-22中点O为投影中心。
在抽象的针孔模型中点P(X w,Y w,Z w)由通过投影中心O的光线投影到图像平面上,相应的图像点为p(x,y,f)。
成像芯片的中心通常不在光轴上,定义图像平面与光轴交点为主点o c坐标(c x,c y)。
f为透镜的物理焦距,定义f x为焦距长度与像素x轴方向长度的比,定义f y 为焦距长度与像素y轴方向长度的比。
可以得到x=f x(X wZ w)+c x(1)y=f y(Y wZ w)+c y(2)将坐标为(X,Y,Z)的物理点映射到投影平面上坐标为(x,y)的过程叫投影变换。
齐次坐标可以建立这种变换。
齐次坐标把维数为n投影空间的点表示成(n+1)维向量。
图像平面为二维投影空间,可用三维向量表示该平面上的点。
将摄像机参数f x、f y、c x、c y重新排列为一个3×3的矩阵,如M,该矩阵就是摄像机内部参数矩阵。
将物理世界中的点投射到摄像机上,用下式表示:p=MP,其中p=[x yw ],M=[f x0c x0f y c y001],P=[X wY wZ w](3)标定过程摄像机参数f x、f y、c x、c y、倾斜系数需要通过计算得到,这一过程为摄像机标定。
dlt标定法

DLT标定法1. 介绍DLT(Direct Linear Transform)标定法是一种用于摄像机标定的常用方法。
摄像机标定是指确定相机内外参数的过程,以便在图像中进行准确的测量和三维重构。
DLT标定法通过建立世界坐标系和图像坐标系之间的对应关系,来估计相机的内外参数。
在计算机视觉领域,摄像机标定是非常重要的基础工作,它广泛应用于计算机视觉、增强现实、虚拟现实等领域。
DLT标定法是其中最基础且常用的方法之一。
2. 标定原理DLT标定法基于投影几何原理,假设世界坐标系中的三维点P(x, y, z)通过相机投影变换得到图像平面上的二维点p(u, v)。
该变换可以表示为:s * [u v 1]ᵀ = H * [x y z 1]ᵀ其中,s为缩放因子,H为3x4的投影矩阵。
假设我们有n对已知的三维点P和对应的二维点p,我们可以将这些对应关系表示为:sᵢ * [uᵢ vᵢ 1]ᵀ = H * [xᵢ yᵢ zᵢ 1]ᵀ,i = 1, 2, ..., n将上述等式展开,可以得到:uᵢ = (h₁₁ * xᵢ + h₁₂ * yᵢ + h₁₃ * zᵢ + h₁₄) / (h₃₁ * xᵢ + h₃₂ * yᵢ + h₃₃ * zᵢ + h₃₄)vᵢ = (h₂₁ * xᵢ + h₂₂ * yᵢ + h₂₃ * zᵢ + h₂₄) / (h₃₁ * xᵢ + h₃₂ * yᵢ + h₃₃ * zᵢ + h₃₄)我们可以将上述公式整理成矩阵形式:⎡ u₁⎡ ⎡ x₁ y₁ z₁ 1 ⎡ ⎡ h₁₁/h₃₁ h₁₂/h₃₁ h₁₃/h₃₁ h₁₄/h₃₁⎡ ⎡ s⋅û⎡⎡ u₂ ⎡ ⎡ x₂ y₂ z₂ 1 ⎡ ⎡ h₂₁/h₃₂ h₂₂/h₃₂ h₂₃/h₃₂ h₂₄/h₃₂⎡ ⎡ s⋅v⎡⎡⎡ . ⎡ = ⎡ . . . . ⎡ * ⎡ . . . . ⎡ = ⎡ .⎡⎡ . ⎡ ⎡ . . . . ⎡ ⎡ . . . . ⎡ ⎡ .⎡⎡ u⎡ ⎡ ⎡ x⎡ y⎡ z⎡ 1 ⎡ ⎡ h⎡₁/h₃⎡ h⎡₂/h₃⎡ h⎡₃/h₃⎡ h⎡₄/h₃⎡⎡ ⎡ s⋅û⋅v⎡⦁hʲ₁₂/hʲ₁₁ + û² + v⎡²⦁hʲ₁₂²/hʲ₁₁² - hʲ₂₂ - hʲ₂₂²) / (hʲ₁₂ * v⎡ + hʲ₁₀ -û)其中,û和v⎡为归一化的图像坐标,s为缩放因子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三 MATLAB图像处理基本操作及摄像机标定(DLT) 实验三 Matlab图像处理基本操作及摄像机标定(DLT) (DLT)1、实验目的通过应用Matlab的图像处理基本函数,学习图像处理中的一些基础操作和处理。
理解摄像机标定(DLT)方法的原理,并利用程序实现摄像机内参数和外参数的估计。
2、实验内容:1) 读取一幅图像并显示。
2) 检查内存(数组)中的图像。
3) 实现图像直方图均衡化。
4) 读取图像中像素点的坐标值。
5) 保存图像。
6) 检查新生成文件的信息。
7) 使用阈值操作将图像转换为二值图像。
8) 根据RGB图像创建一幅灰度图像。
9) 调节图像的对比度。
10) 在同一个窗口内显示两幅图像。
11) 掌握matlab命令及函数,获取标定块图像的特征点坐标。
12) 根据摄像机标定(DLT)方法原理,编写Matlab程序,估计摄像机内参数和12) 外参数。
3、实验要求:1) 选取一幅图像,根据实验内容1)—10)给出结果。
2) 根据给定的标定块图像及实验内容11),12)进行编程实验。
3) 书写实验报告4、实验设备1) 微机。
2) Matlab软件。
5、实验原理DLT变换:Abdal-Aziz和Karara于70年代初提出了直接线性变换像机定标的方法,他们从摄影测量学的角度深入的研究了像机图像和环境物体之间的关系,建立了像机成像几何的线性模型,这种线性模型参数的估计完全可以由线性方程的求解来实现。
直接线性变换是将像点和物点的成像几何关系在齐次坐标下写成透视投影矩阵的形式:X,,wu,,,, Y,,w,,,svP 3,4,,,,Zw ,,1,,,,1,,为图像坐标系下的点的齐次坐标,为世界坐标系下的空其中,,,,u,v,1X,Y,Zwww间点的欧氏坐标, P为3*4的透视投影矩阵,为未知尺度因子。
消去S,可以得到方程组:pX,pY,pZ,p,puX,puY,puZ,pu,011w12w13w1431w32w33w34pX,pY,pZ,p,puX,puY,puZ,pu,021w22w23w1431w32w33w34当已知N个空间点和对应的图像上的点时,可以得到一个含有2*N个方程的方程组: AL,0其中A为(2N*12)的矩阵, L为透视投影矩阵元素组成的向量:T ,,p,p,p,p,p,p,p,p,p,p,p,p111213142122232431323334||AL||像机定标的任务就是寻找合适的L,使得为最小,即 min || AL || L给出约束: p,134'T,1T L,,(CC)CBL‘为L的前11个元素组成的向量, C为A前11列组成的矩阵, B为A前12列组成的向量。
6、程序代码I=imread ('DSCN0831.JPG');imshow(I);whosfigure,I1=rgb2gray(I);figure,imshow(I1)imhist(I1);I2=histeq(I1)figure,imshow(I2)figure,imhist(I2)a=imread('DSCN0831.JPG')imwrite(I1,'DSgray.jpg');imwrite(I2,'DSgrayeq.jpg');inf=imfinfo('DSCN0831.JPG') ?level=graythresh(I2);bw=im2bw(I2,level);figure,imshow(bw)whosI3=imadjust(I2,stretchlim(I2),[0 1]);figure,imshow(I3);a=imread('DSCN0831.JPG');b=imread('DSgray.jpg');subplot(1,2,1),imshow(a);subplot(1,2,2),imshow(b);clear;xpot=[];ypot=[];imshow('DSCN0831.JPG');hold on;n=input('Please input the number of pot:'); for i=1:n [x,y]=ginput(1);plot(x,y,'or');text(x+1,y+1,num2str(i));xpot=[xpot,x];ypot=[ypot,y];end[xpot;ypot][xw;yw;zw]a=[xw',yw',zw',ones([100 1]),zeros([1004]),(-1)*xpot'.*xw',(-1)*xpot'.*yw',(-1)*xpot'.*zw',-1*xpot';zeros([100 4]),xw',yw',zw',ones([100 1]),(-1)*ypot'.*xw',(-1)*ypot'.*yw',(-1)*ypot'.*zw',-1*ypot'];c=a(:,1:11);b=a(:,12);l=(-1)*(c'*c)^(-1)*c'*b7、运行结果, 图像信息:Filename: 'DSCN0831.JPG'FileModDate: '21-十月-2011 21:29:34'FileSize: 160501Format: 'jpg'FormatVersion: ''Width: 1024Height: 768BitDepth: 24ColorType: 'truecolor'FormatSignature: ''NumberOfSamples: 3CodingMethod: 'Huffman'CodingProcess: 'Sequential'Comment: {}ImageDescription: ' 'Make: 'NIKON 'Model: 'E990 'Orientation: 1XResolution: 300YResolution: 300 ResolutionUnit: 'Inch' Software: 'E990v1.0 ' DateTime: '0000:00:00 00:00:00 ' YCbCrPositioning: 'Co-sited' DigitalCamera: [1x1 struct], 检查内存中的图像:Name Size Bytes Class Attributes I 768x1024x3 2359296 uint8I1 768x1024 786432 uint8I2 768x1024 786432 uint8a 768x1024x3 2359296 uint8bw 768x1024 786432 logicalinf 1x1 12144 structlevel 1x1 8 double , 图像图一直方图图二均衡后的直方图图三调节对比度后的图像图四二进制图图五灰度图图六显示两幅图像图七标定图, 定块图像的特征点坐标Columns 1 through 9-0.0818 -0.3738 0.3232 0.8692 0.5916 0.1596 -0.5593 -1.1503 -0.91881.0132 1.2610 1.2829 0.8808 0.7317 0.8048 0.0446 0.3487 0.8531Columns 10 through 18-0.1365 -0.7079 -1.4787 -1.4430 -1.2126 -1.8520 -2.8819 -3.5305 -4.32890.4174 -0.1265 0.0022 0.5168 0.6806 1.8721 2.7697 3.0680 3.6265Columns 19 through 27-4.9902 -5.4902 -5.9902 -6.4902 -6.9672 -7.4556 -7.9556 -8.4556 -8.95564.1557 4.65575.1557 5.65576.1703 6.67037.1703 7.67038.1703Columns 28 through 364 -9.2702 -9.2702 -9.2702 -9.3865 -9.3796 -9.287-9.2702 -9.2759 -9.28178.7069 9.2727 9.7580 10.2580 10.7580 11.2580 11.7580 12.2654 12.7873Columns 37 through 45-9.2874 -9.2874 -9.2874 -9.2874 -9.2874 -9.2874 -9.2874 -9.2874 -9.287413.2946 13.7946 14.2946 14.7946 15.2946 15.7946 16.2946 16.794617.2946Columns 46 through 54-9.2874 -9.2874 -9.2874 -9.2874 -9.1319 -9.0801 -8.9706 -8.5455 -8.879617.7946 18.2946 18.7946 19.2946 19.2902 19.2317 19.0855 18.851618.2054Columns 55 through 63-9.1734 -9.7483 -9.6031 -9.2978 -8.8381 -8.7298 -9.0697 -9.6849 -10.213717.8297 18.0095 18.8896 18.8487 18.4320 17.8589 17.4174 16.917416.4247Columns 64 through 72-10.8174 -11.5421 -12.8646 -13.8704 -14.8589 -15.5248 -16.0467 -16.1262 -15.590416.0197 16.1221 16.4803 16.9262 17.7332 18.6382 19.6089 20.470020.4437Columns 73 through 81-15.1653 -15.1492 -15.6503 -16.4153 -16.9153 -16.4591 -15.9591 -15.5167 -16.559320.0855 19.7273 19.2712 19.3341 19.3633 19.3560 19.3560 19.3487 19.7727Columns 82 through 90-18.9315 -18.6146 -19.7033 -17.5651 -18.4268 -18.9672-20.3520 -20.8520 -20.372720.1776 19.8224 19.0665 18.3253 17.9905 17.841417.5636 17.5636 17.5636Columns 91 through 99-19.7402 -18.9061 -17.9349 -17.4706 -17.1377 -17.3796 -17.6734 -18.5132 -19.461417.5782 17.6294 17.9437 18.5285 19.6893 20.7478 21.7332 22.1849 22.3268Column 100-19.834722.1148ans =1.0e+003 *Columns 1 through 90.5020 0.5050 0.5065 0.5125 0.5080 0.5155 0.5125 0.5140 0.44800.7212 0.6492 0.5683 0.4797 0.3957 0.2982 0.2022 0.1047 0.6943Columns 10 through 180.4465 0.4465 0.4465 0.4465 0.4465 0.4465 0.4450 0.3880 0.33700.6178 0.5383 0.4557 0.3717 0.2832 0.1857 0.0957 0.0867 0.0837 Columns 19 through 270.2875 0.2455 0.2035 0.1705 0.1735 0.2065 0.2455 0.2890 0.3385 0.0747 0.0702 0.0627 0.0642 0.1332 0.1422 0.1482 0.1572 0.1662 Columns 28 through 360.3880 0.3910 0.3400 0.2935 0.2515 0.2110 0.1795 0.1780 0.2155 0.1797 0.2652 0.2532 0.2382 0.2292 0.2172 0.2082 0.2757 0.2892 Columns 37 through 450.2530 0.2950 0.3415 0.3910 0.3925 0.3415 0.2965 0.2560 0.2170 0.3027 0.3207 0.3357 0.3552 0.4347 0.4152 0.3957 0.3792 0.3582 Columns 46 through 540.1825 0.1885 0.2200 0.2590 0.2980 0.3445 0.3955 0.3940 0.3475 0.3447 0.4092 0.4302 0.4437 0.4662 0.4902 0.5112 0.5893 0.5623 Columns 55 through 630.3025 0.2635 0.2230 0.1900 0.2275 0.2680 0.3040 0.3475 0.3955 0.5367 0.5172 0.4962 0.4767 0.5577 0.5817 0.6042 0.6312 0.6597 Columns 64 through 720.5665 0.5725 0.5725 0.5740 0.5755 0.5800 0.5815 0.5860 0.6490 0.6943 0.6252 0.5473 0.4617 0.3762 0.2862 0.1932 0.0987 0.0927 Columns 73 through 810.6475 0.6430 0.6400 0.6370 0.6340 0.6280 0.6265 0.6820 0.6850 0.1827 0.2727 0.3627 0.4422 0.5232 0.5998 0.6687 0.6478 0.5757 Columns 82 through 900.6880 0.6940 0.6970 0.7015 0.7045 0.71351.1485 0.7285 0.73600.5037 0.4227 0.3447 0.2622 0.1767 0.0867 -0.2478 0.6222 0.5533 Columns 91 through 990.7390 0.7465 0.7495 0.7555 0.8065 0.8560 0.8350 0.8335 0.8455 0.4842 0.4122 0.3327 0.2517 0.2442 0.1587 0.3807 0.4452 0.3102 Column 1000.82150.5787, 转换为世界坐标ans =Columns 1 through 1760 60 60 60 100 100 100 100 100 120 140 140 140 140 140 140 140 0 0 0 0 0 0 0 0 0 0 0 0 20 20 20 20 6060 80 100 120 100 80 60 40 20 80 120 60 120 100 80 40 80 Columns 18 through 34140 140 140 140 140 140 140 140 20 20 20 20 60 60 60 60 6060 60 100 100 120 120 120 140 0 40 80 120 120 100 80 60 4060 40 60 120 120 100 60 40 140 140 140 140 140 140 140 140 140 Columns 35 through 50100 100 120 120 120 120 140 140 140 140 140100 80 60 40 2080 0 100 80 60 40 20 40 60 100 120 140 140 140 140 140140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140。