51单片机控制步进电机程序及硬件电路图
51单片机驱动步进电机的方法(详解)

51单片机驱动步进电机的方法默认分类2007-08-27 09:06 阅读6456 评论15 字号:大大中中小小在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************************;*************************步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号转动的速度和脉冲的频率成正比; 本步进电机步进角为7.5度. 一圈360 度, 需要48 个脉冲完成;---------------------------------------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转7.5 度);----------------------------------------------------------------------------------;----------------------------正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转3 圈共144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对A 的判断,当A = 0 时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END51单片机控制四相步进电机拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
[整理]51单片机驱动步进电机电路及程序(1)
![[整理]51单片机驱动步进电机电路及程序(1)](https://img.taocdn.com/s3/m/6aaae6432af90242a995e516.png)
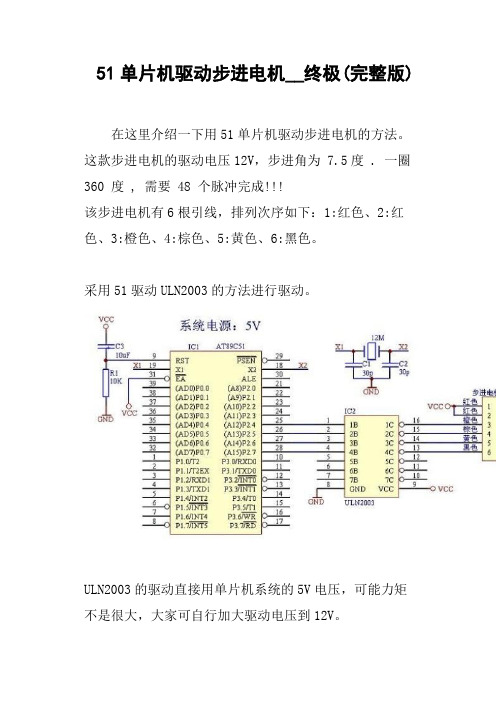
在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、 5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************** *************;**************************** 步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;---------------------------- 正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------ MOV R3,#144 反转一圈共 144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
51单片机按键控制步进电机加减速及正反转
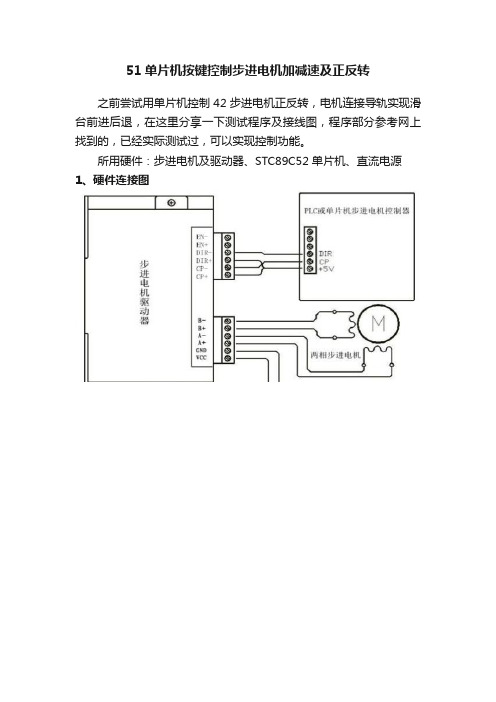
51单片机按键控制步进电机加减速及正反转之前尝试用单片机控制42步进电机正反转,电机连接导轨实现滑台前进后退,在这里分享一下测试程序及接线图,程序部分参考网上找到的,已经实际测试过,可以实现控制功能。
所用硬件:步进电机及驱动器、STC89C52单片机、直流电源1、硬件连接图•注意:上图为共阳极接法,实际连接参考总体线路连接。
•驱动器信号端定义:PUL+:脉冲信号输入正。
( CP+ )PUL-:脉冲信号输入负。
( CP- )DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
•电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
•电源连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.•总体线路连接输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
输入信号接口有两种接法,可根据需要采用共阳极接法或共阴极接法。
在这里我采用的是共阴极接法:分别将PUL-,DIR-,EN-连接到控制系统的地端(接入单片机地端);脉冲输入信号通过PUL+接入单片机(代码中给的P2^6脚),方向信号通过DIR+接入单片机(代码中给的P2^4脚),使能信号通过EN+接入(不接也可,代码中未接,置空)。
按键连接见代码,分别用5个按键控制电机启动、反转、加速、减速、正反转。
注意:接线时请断开电源,电机接线需注意不要错相,相内相间短路,以免损坏驱动器。
2、代码1.#include<reg51.h>2.#define MotorTabNum 53.unsigned char T0_NUM;4.sbit K1 = P3^5; // 启动5.sbit K2 = P3^4; // 反转6.sbit K3 = P3^3; // 加速7.sbit K4 = P3^2; // 减速8.sbit K5 = P3^1; //正反转9.10.sbit FX = P2^4; // 方向11.//sbit MotorEn = P2^5; // 使能12.sbit CLK = P2^6; // 脉冲13.14.inttable[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40};15.16.unsigned char g_MotorSt = 0; //17.unsigned char g_MotorDir = 0; //18.unsigned char MotorTab[7] = {12, 10, 8, 6, 4, 2,1};19.20.signed char g_MotorNum = 0;21.22.void delayms(xms);23.void mDelay(unsigned int DelayTime);24.void T0_Init();25.26.void KeyScan(void);27.28.29.30.void main(void)31.{32.T0_Init();33.// MotorEn = 0; //34.FX = 0;35.while(1)36.{37.KeyScan(); //38.}39.40.41.}42.43.void T0_Init()44.{45.TMOD = 0x01;46.TH0 = (65535-100)/256; // 1ms47.TL0 = (65535-100)%256;48.EA = 1;49.ET0 = 1;50.// TR0 = 1;51.52.}53.54.void T0_time() interrupt 155.{56.// TR0 = 0;57.TH0 = (65535-100)/256;58.TL0 = (65535-100)%256;59.T0_NUM++;60.if(T0_NUM >= MotorTab[g_MotorNum]) //61.{62.T0_NUM = 0;63.CLK=CLK^0x01; //64.}65.// TR0 = 1;66.}67.68.69.//--------------------------70.void KeyScan(void)71.{72.if(K1 == 0)73.{74.delayms(10);75.if(K1 == 0)76.{77.g_MotorSt = g_MotorSt ^ 0x01;78.// MotorEn ^= 1;79.TR0 = 1;80.FX ^= 0; //反转81.}82.}83.84.if(K2 == 0)85.{86.delayms(10); //正转87.if(K2 == 0)88.{89.g_MotorDir = g_MotorDir ^ 0x01;90.FX ^= 1; //加速91.}92.}93.94.if(K3 == 0) //95.{96.delayms(5); //加速97.if(K3 == 0)98.{99.g_MotorNum++;100.if(g_MotorNum > MotorTabNum) 101.g_MotorNum = MotorTabNum; 102.}103.}105.if(K4 == 0) //106.{107.delayms(5); // 减速108.if(K4 == 0)109.{110.g_MotorNum--;111.if(g_MotorNum < 0)112.g_MotorNum = 0;113.}114.}115.116.if(K5 == 0) //117.{118.delayms(10); // 正反转119.if(K5 == 0)120.{121.g_MotorSt = g_MotorSt ^ 0x01; 122.g_MotorDir = g_MotorDir ^ 0x01; 123.MotorEn ^= 1;124.TR0 = 1;125.while(1)126.{127.FX ^= 1; //128.delayms(90000);129.FX ^= 0; //130.delayms(90000);131.}132.}133.}135.136.void delayms(xms)//延时137.{138.unsigned int x,y;139.for(x=xms;x>0;x--)140.for(y=110;y>0;y--);141.}3、常见问题解答•控制信号高于5v一定要串联电阻,否则可能会烧坏驱动器控制接口电路。
(整理)51单片机控制步进电机入门级教程及程.

AJMPKEY
环境影响的经济损益分析,也称环境影响的经济评价,即估算某一项目、规划或政策所引起的环境影响的经济价值,并将环境影响的经济价值纳入项目、规划或政策的经济费用效益分析中去,以判断这些环境影响对该项目:规划或政策的可行性会产生多大的影响。对负面的环境影响估算出的是环境费用,对正面的环境影响估算出的是环境效益。
RET
TAB1:DB02H,06H,04H,0CH
DB08H,09H,01H,03H;正转模型资料
END
JNBP0.1,NEG
SJMPWAIT
JUST:JBP0.1,NEG;首次按键处理
POS:MOVA,R4;正转9度
MOVCA,@A+DPTR
MOVP1,A
ACALLDELAY
INCR4
AJMPKEY
NEG:MOVR4,#6;反转9度
MOVA,R4
MOVCA,@A+DPTR
MOVP1,A
ACALLDELAY
CJNER4,#255,LOOPF;是结束标志
填报内容包括四个表:MOVR4,#7
1.规划环境影响评价的报审LOOPF:DECR4
51单片机实现步进电机控制
摘要8051单片机控制步进电机进行简单的转速控制,包括启停变换转速控制等。
利用利用单片机实验箱以模拟电压提供电机转速设定值,使用并行模数转换芯片ADC0809 进行电压信号的采集和数据处理转换得到速度给定的数字量,通过单片机的P1 口控制步进电机的控制端,使其按一定的控制方式进行转动。
调节步进电机转速,使其与给定值相当,最后,利用ZLG7290模块驱动LED数码管显示速度设定值。
通过这个单片机控制系统的设计来掌握A/D转换的原理,了解步进电机的工作原理,掌握它的转速控制方式和调速方法,并且掌握LED显示原理和ZLG7290模块的使用方法,用LED数码管显示模数转换的结果,设计电路的硬件接线图和实现上述要求的程序。
最后实现通过改变模拟电压就可以改变步进电机的转速控制,并且在LED 数码管上显示步进电机的转速这一功能。
关键词:51单片机调速步进电机LED显示绪论在进行51单片机的学习和实验过程中曾利用51单片机对步进电机进行过简单的控制,包括利用单片机试验箱对步进电机进行转角控制,方向控制等。
即按照设定的转动角度步进电机进行动作,来实现步进电机的实时控制,通过设定的方向来实现步进电机的方向反转控制等,并利用利用ZLG7290模块驱动LED数码管显示步进电机的设定值与步进电机实际所转过过的角度,同时显示步进电机的旋转方向等。
这次所进行的步进电机转速控制系统是对步进电机的另一种控制,即实现步进电机的转速控制而不是单单的转动角度控制,并且是通过模拟量输入来时时的控制步进电机的转速。
并且通过数码管来显示出所设定的步进电机的转速。
第一章系统程序及分析1.1对步进电机控制系统的设计要求进行设计,主程序程序如下:#include<reg51.h>#include"VIIC_C51.h"#include"zlg7290.h"sbit PA=P1^0;sbit PB=P1^1;sbit PC=P1^2;sbit PD=P1^3;sbit SDA=P1^7;sbit SCL=P1^6;sbit RST=P1^4;sbit KEY_INT=P1^5;unsigned char xdata *port;unsigned char count,count1=0,c[3],n;/*****************ADC0809*******************************************/int1()interrupt 2{count=*port;*port=0;}/*******************************************************************//*****************延迟函数*****************************************/delay(unsigned int t){unsigned int i;for(i=0;i<t;i++){TMOD=0X11;TH0=-500/256;TL0=-500%256;TR0=1;while(TF0!=1);TF0=0;}}/*****************脉冲函数********************************************/ time1()interrupt 3{if(count==0X00)count1=4;TH1=-3*1000000/(256*count);TL1=-3*1000000%(256*count);switch(count1){ case 0:{PA=1;PB=1;PC=0;PD=0;}break;case 1:{PA=0;PB=1;PC=1;PD=0;}break;case 2:{PA=0;PB=0;PC=1;PD=1;}break;case 3:{PA=1;PB=0;PC=0;PD=1;}break;default:{PA=0;PB=0;PC=0;PD=0;}}count1++;if(count1>=4){count1=0;}}/************************主函数*******************************************/ main(){ RST=0;delay(1);RST=1;delay(10);port=0x7ff8;EA=1;ET1=1;ET0=1;TMOD=0X11;TH1=-100000/256;TL1=-100000%256;TR1=1;EX1=1;IT1=1;*port=0;while(1){c[0]=count/100;c[1]=count%100/10;c[2]=count%10;for(n=0;n<3;n++)ZLG7290_SendCmd(0x60+(2-n),c[n]);}}1.2程序分析:程序的开头包含了3个头文件,第一个头文件<reg51.h>中对所有的特殊功能寄存器进行了SFR定义,只要引用了<reg51.h> 就可以直接引用特殊功能寄存器名。
单片机课程设计-正反转可控的步进电机

正反转可控的步进电机1 引言本课程设计目的是为了进一步掌握单片机系统,加强对系统设计和应用能力的培养而开设的综合设计训练环节。
本系统用51单片机和ULN2003A电机驱动芯片并加入控制按钮来实现步进电机的正、反转控制。
2 设计方案及原理步进电机可以对旋转角度和转动速度进行高精度的控制。
作为控制执行部件,广泛应用于自动控制和精密仪器等领域。
例如在仪器仪表、机床设备以及计算机的外围设备中(如打印机和绘图仪),常有对精确的、可控制的回转源的需要。
在这种情况下,使用步进电机最为理想。
2.1 步进电机控制步进电机两个相邻磁极之间的夹角为60°,线圈绕过相对的两个磁极构成一相。
此外各磁极上还有5个分布均匀的锯形小齿。
电机转子上没有绕组。
当某相绕组通电时,响应的两个磁极就分别形成N-S极,产生磁场,并与转子形成磁路。
如果这是定子的小齿与转子的小齿没有对齐,则在磁场的作用下,转子将转动一定的角度,使转子齿与定子齿对齐,从而使步进电机向前“走”一步。
如果通过单片机按顺序给绕组施加有序的脉冲电流,就可以控制电机的转动,从而进行了数字到角度的转换。
转动的角度大小与施加的脉冲数成正比,转动的速度与脉冲频率成正比,而转动方向则与脉冲的顺序有关。
2.2 步进电机驱动方式步进电机常用的驱动方式是全电压驱动,即在电机移步与锁步时都加载额定电压。
为防止电机过流及改善驱动特性需加限流电阻。
由于步进电机锁步时,限流电阻要消耗掉大量的功率。
因此,限流电阻要有较大功率容量,并且开关管也要有较高的负载能力。
步进电机也可以使用软件方法,即使用单片机实现,这样不但简化了电路,同时降低了成本。
使用单片机以软件方式驱动步进电机,不但可以通过编程方法在一定范围之内自由的设定步进电机的转速,往返转动的角度以及转动次数等;还可以方便灵活的控制步进电机的运行状态,以满足不同用户的需求。
因此常把单片机步进电机控制电路称之为可编程步进电机控制驱动器。
51单片机原理图

2.3 51单片机增强型学习系统各组成部份原理图及功能简介2.3.1 共阴极数码管动态扫描控制图2.2 51单片机增强型学习系统的四位共阴极数码管动态扫描硬件连接原理图AT89S51单片机P0口是一组8位漏极开路型双向I/O 口,也即地址/数据总线复用口。
作为输出口用时,每位能驱动8个TTL 逻辑门电路,对端口写“1”可作为高阻抗输入端用。
在访问外部数据存储器或程序存储器时,这组口线分时转换地址(低8位)和数据总线复用,在访问期间激活内部上拉电阻。
在Flash 编程时,P0口接收指令字节,而在程序校验时,输出指令字节,校验时,要求外接上接电阻。
AT89S51单片机P2口是一个带有内部上拉电阻的8位双向I/O 口,P2的输出缓冲级可驱动(吸收或输出电流)4个TTL 逻辑门电路。
对端口写“1”,通过内部的上拉电阻把端口拉到高电平,此时可作输入口,作输入口使用时,因为内部存在上拉电阻,某个引脚被外部信号拉低时会输出一个电流。
在访问外部程序存储器或16位地址的外部数据存储器(例如执行MOVX @DPTR 指令)时,P2口送出高8位地址数据。
在访问8位地址的外部数据存储器(如执行MOVX @Ri 指令)时,P2口线上的内容(也即特殊功能寄存器SFR 区中P2寄存器的内容),在整个访问期间不改变。
Flash 编程或校验时,P2亦接收高位地址和其它控制信号。
在上面的硬件连接原理图里,我们用到的是P0和P2口控制四位数码管显示的。
四位数码管显示的方式是动态扫描显示,动态扫描显示是单片机中应用最为广泛的一种显示方式之一。
其接口电路如上图是把所有显示器的8个笔划段a-h同名端连在一起由单51单片机增强型学习系统片机的P0.0~P0.7控制,而每一个数码管的公共极(阴极)是各自独立地受单片机P2.7~P2.4控制。
CPU向字段输出口P0口送出字形码时,所有数码管接收到相同的字形码,但究竟是那个数码管亮则取决于P2.7~P2.4的输入结果,所以我们就可以自行决定何时显示哪一位了。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
51单片机驱动步进电机电路及程序
相绕组通断,P1.1控制B相,P1.2
控制C相。
2021/8/5
13
以A相控制为例:
当 P1 . 0 输 出 为 1 , 发 光管不发光,因此光敏二极 管截止,使担负驱动任务的 达林顿管导通。A相绕组通电。
相反,当P1.0=0→发 光管发光→光敏管导通→达 林顿管截止→A相绕组不通 电。
2021/8/5
2021/8/511 NhomakorabeaSUB: SETB P3.0
SETB P3.0 ;保证输出高电平的时间>5μs
SETB P3.0
CLR P3.0
;变为低电平
MOV R7,30H
LOOP: NOP
;软件延时程序:
NOP
;基本延时(10μs×时间常数)
NOP
DJNZ R7,LOOP
RET
※时间常数事先可装入30H单元,改变30H单元的内容就可改
所以按照 A→AB→B→BC→C→CA→A
的顺序控制,电机将按顺时针方向旋转, 每步转动1.5°,即步距角=1.5°,
由于要经过6步才走完一个齿距 (6×1.5°=9°),所以叫三相六拍。
2021/8/5
7
如果要使步进电机反转,只要按
A→AC→C→CB→B→BA
顺序通电就行了。
结论:从上面两种运行方式可看出,错齿是促使步
进电机旋转的根本原因,当某相通电,相应的齿对
齐,迫使电机旋转一个步距角,未通电的各相的齿
出现了新的错位。改变通电的顺序和通电的相数,
可组合出其它的运行方式。
讨论:三项三拍和三项六拍运行方式,哪种定位
2021更/8/5精确?
8
三、步进电机有如下特点:
❖ 给步进脉冲电机就转,不给步进脉冲电机就不转; ❖ 步进脉冲频率高,步进电机转得快;步进脉冲频率
51单片机驱动步进电机__终极完整版
51单片机驱动步进电机__终极(完整版)在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;************************************************ ******************************;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲 START: MOVR0,#00H START1: MOV P2,#00H MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 START MOV P2,ALCALL DELAY INC R0DJNZ R3,START1MOV P2,#00H LCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲 START2:MOV P2,#00H MOV R0,#05 START3: MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0DJNZ R3,START3 MOV P2,#00HLCALL DELAY1 LJMP MAINDELAY: MOV R7,#40 步进电机的转速 M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:DB 30H,60H,0C0H,90H 正转表 DB 00 正转结束DB 30H,90H,0C0H,60H 反转表 DB 00 反转结束 END 51单片机控制四相步进电机拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为 360/(4×5)=18度。
51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)

51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)自己写的,不规范还望包含,keil和protues文件单片机源程序如下:1.#include <reg52.h>2.3.#define uchar unsigned char4.#define uint unsigned int5.uint speed = 100; //初始转速6.uint max = 200; //最慢转速7.uint min = 20; //最快转速8.9.sbit swich = P2^0; //总开关10.sbit dir = P2^1; //电机旋转方向11.sbit le1=P2^6;12.sbit le2=P2^7;13.sbit speedadd=P3^2;14.sbit speedsub=P3^3;15.16.unsigned char uca_MotorStep[]={0x01,0x03,0x02,0x06, 0x04,0x0C,0x08,0x09}; //励磁电流数组。
17.18.19.uchar leddata[]={20.21.0x3F, //"0"22.0x06, //"1"23.0x5B, //"2"24.0x4F, //"3"25.0x66, //"4"26.0x6D, //"5"27.0x7D, //"6"28.0x07, //"7"29.0x7F, //"8"30.0x6F, //"9"31.0x40, //"-"32.0x00, //熄灭33.};34.35.36.void delay1ms(void) //误差 0us37.{38.unsigned char a,b,c;39.for(c=1;c>0;c--)40.for(b=142;b>0;b--)41.for(a=2;a>0;a--);42.}43.44.void delay(uint x ) //多功能毫秒延时45.{46.uint i;47.for(i=0;i<x;i++)48.{49.delay1ms();50.}51.}52.53.54.55.void display(void)56.{57.if(swich==1)58.{59.P0= leddata[11];60.delay(1);61.le2=1;62.le1=1;63.delay(1);64.le2=0;65.le1=0;66.67.}68.else69.{70.if(dir==1)71.{72.P0= leddata[11];73.delay(1);74.le2=1;75.delay(1);76.le2=0;77.}78.else79.{80.P0 =leddata[10];81.delay(1);82.le2=1;83.delay(1);84.le2=0;85.}86.87.P0=leddata[9-(speed-20)/20];88.delay(30);89.le1=1;90.delay(5);91.le1=0;92.93.}94.}95.96.97.void Init_INT0()98.{99.EX0=1; //开启外部中断 0100.IT0=1; //设置成低电平触发,1为下降沿触发101.EX1=1; //开启外部中断 1102.IT1=1; //设置成低电平触发,1为下降沿触发103.EA=1; //开启总中断104.}105.106.void Interrupt0_handler() interrupt 0107.{108.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰109.delay(20); //同样是为了消除抖动而产生新的中断110.if(speed>min)111.{speed=speed-20;} //限制最快转速112.else113.{speed=min;}114.while(speedadd==0);115.EA=1; //恢复中断116.}117.118.119.void Interrupt1_handler() interrupt 2120.{121.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰122.delay(20); //同样是为了消除抖动而产生新的中断123.if(speed<max)124.{speed=speed+20;}125.else126.{speed=max;} //限制最慢转速127.while(speedsub==0);128.EA=1; //恢复中断130.131.void main()132.{133.int i; //初始化134.dir=1;135.le1=0;136.le2=0;137.138.139.start:140.if(swich==0)141.{Init_INT0();} //总开关开启,初始化中断,开始转动142.else143.{display(); goto start; }144.145.146.if(dir==1)147.seq:148.{149.while(1)150.{151.display();152.for (i=0; i<8; i++)153.{154.P1 = uca_MotorStep[i]; //取数据155.delay(speed); //调节转速156.}157.if(dir==0) //是否换向159.delay(5); // 换向延时160.goto oppo; //换向161.}162.if(swich==1) //总开关运行中关闭163.goto start; //等待开启164.165.}166.167.}168.else169.oppo:。
51单片机驱动步进电机电路及程序
51单片机驱动步进电机电路及程序(总4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--51单片机驱动步进电机电路及程序在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为度 . 一圈 360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;*********************************************************************************;********** ******************步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz ;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为度 . 一圈 360 度 , 需要 48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应; B组线圈对应; C组线圈对应; D组线圈对应; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转度);----------------------------------------------------------------------------------;----------------------------正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2 MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
(整理)51单片机驱动步进电机电路及程序1.

在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、 5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************** *************;**************************** 步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;---------------------------- 正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
51单片机控制步进电机程序及硬件电路图

#include <AT89X51.h>static unsigned int count; //计数static int step_index; //步进索引数,值为0-7static bit turn; //步进电机转动方向static bit stop_flag; //步进电机停止标志static int speedlevel; //步进电机转速参数,数值越大速度越慢,最小值为1,速度最快static int spcount; //步进电机转速参数计数void delay(unsigned int endcount); //延时函数,延时为endcount*0.5毫秒void gorun(); //步进电机控制步进函数void main(void){count = 0;step_index = 0;spcount = 0;stop_flag = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFE;TL0 = 0x0C; //设定时每隔0.5ms中断一次TR0 = 1; //开始计数turn = 0;speedlevel = 2;delay(10000);speedlevel = 1;do{speedlevel = 2;delay(10000);speedlevel = 1;delay(10000);stop_flag=1;delay(10000);stop_flag=0;}while(1);}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFE;TL0=0x0C; //设定时每隔0.5ms中断一次count++;spcount--;if(spcount<=0){spcount = speedlevel;gorun();}}void delay(unsigned int endcount) {count=0;do{}while(count<endcount);}void gorun(){ if (stop_flag==1){P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;return;}switch(step_index){case 0: //0P1_0 = 1;P1_1 = 0;P1_2 = 0;P1_3 = 0; break; case 1: //0、1 P1_0 = 1;P1_1 = 1;P1_2 = 0;P1_3 = 0; break; case 2: //1P1_0 = 0;P1_1 = 1;P1_2 = 0;P1_3 = 0; break; case 3: //1、2 P1_0 = 0;P1_1 = 1;P1_2 = 1;P1_3 = 0;break; case 4: //2 P1_0 = 0;P1_1 = 0;P1_2 = 1;P1_3 = 0; break; case 5: //2、3 P1_0 = 0;P1_1 = 0;P1_2 = 1;P1_3 = 1; break; case 6: //3P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 1; break; case 7: //3、0 P1_0 = 1;P1_1 = 0;P1_2 = 0;P1_3 = 1;}if (turn==0){step_index++; if (step_index>7)step_index=0; }else{step_index--;if (step_index<0)step_index=7; }}。
51单片机控制步进电机
设计方案与原理1 设计方案设计一个51单片机四相步进电机控制系统要求系统具有如下功能:(1)由I/O口产生的时序方波作为电机控制信号;(2)信号经过驱动芯片驱动电机的运转;(3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。
2 设计原理步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。
步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。
从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。
四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。
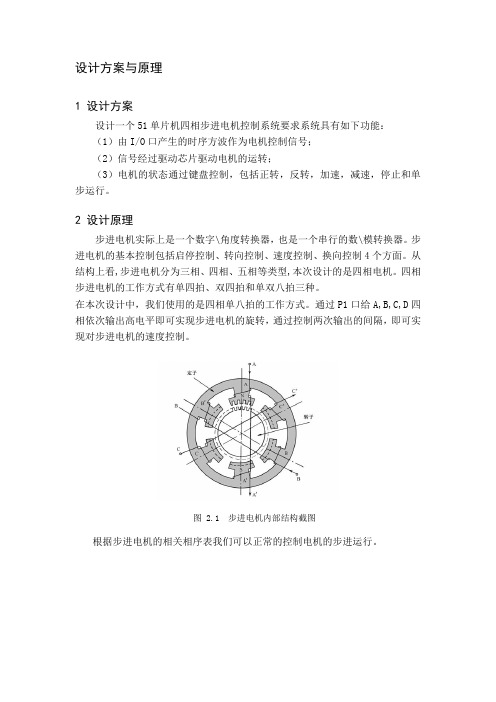
在本次设计中,我们使用的是四相单八拍的工作方式。
通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。
图 2.1 步进电机内部结构截图根据步进电机的相关相序表我们可以正常的控制电机的步进运行。
3 硬件设计根据设计要求和设计原理,我们可以绘制出基本的功能方框图,以便之后我们连接实际电路时的方便和可靠。
用键盘控制具体的功能模块,这样更能直观方便的控制整体的系统,使其达到我们预期的操作效果。
图3.1中简单描述了整个单片机系统的控制模式和控制流程,包括通过时钟电路和键盘电路,来控制ULN2003驱动电机动作。
图表图 3.1 硬件电路功能方框图4 电路原理图4.C程序代码#include <reg52.h>#define KeyPort P3#define DataPort P0 //定义数据端口程序中遇到DataPort 则用P0 替换sbit LATCH1=P2^2;//定义锁存使能端口段锁存sbit LATCH2=P2^3;// 位锁存unsigned char code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9unsigned char code dofly_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码unsigned char TempData[8]; //存储显示值的全局变量sbit A1=P1^0; //定义步进电机连接端口sbit B1=P1^1;sbit C1=P1^2;sbit D1=P1^3;#define Coil_AB1 {A1=1;B1=1;C1=0;D1=0;}//AB相通电,其他相断电#define Coil_BC1 {A1=0;B1=1;C1=1;D1=0;}//BC相通电,其他相断电#define Coil_CD1 {A1=0;B1=0;C1=1;D1=1;}//CD相通电,其他相断电#define Coil_DA1 {A1=1;B1=0;C1=0;D1=1;}//DA相通电,其他相断电#define Coil_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电#define Coil_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电#define Coil_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电#define Coil_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电#define Coil_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电unsigned char Speed=1;bit StopFlag;void Display(unsigned char FirstBit,unsigned char Num);void Init_Timer0(void);unsigned char KeyScan(void);/*------------------------------------------------uS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下 T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t)while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}/*------------------------------------------------主函数------------------------------------------------*/ main(){unsigned int i=512;//旋转一周时间unsigned int n=0;unsigned char num,vo,v;Init_Timer0();Coil_OFF;while(1) //正向{num=KeyScan(); //循环调用按键扫描if(num==1)//第一个按键,速度等级增加{if(Speed<15)Speed=Speed+2;}if(num==2)//第二个按键,速度等级减小{if(Speed>1)Speed=Speed-2;}if(num==3)//第三个按键,电机停转{Coil_OFFStopFlag=1;}if(num==4)//第四个按键,电机启动{StopFlag=0;TR0=1;}if(num==5)//第五个按键,电机反转{TR0=0;TR1=1;}if(num==6)//第六个按键,电机正传{TR0=1;TR1=0;}vo=(0.25*(20-Speed)*64*32)/1000;v=60/vo;TempData[0]=dofly_DuanMa[v/10]; //分解显示信息,如要显示68,则68/10=6 68%10=8TempData[1]=dofly_DuanMa[v%10];}}/*------------------------------------------------显示函数,用于动态扫描数码管输入参数 FirstBit 表示需要显示的第一位,如赋值2表示从第三个数码管开始显示如输入0表示从第一个显示。
51单片机控制步进电机硬件图及C语言编程
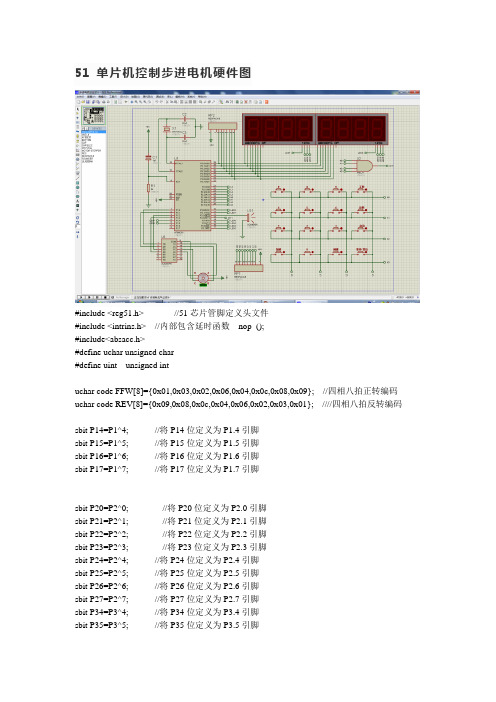
51单片机控制步进电机硬件图#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数_nop_();#include<absacc.h>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍正转编码uchar code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; ////四相八拍反转编码sbit P14=P1^4; //将P14位定义为P1.4引脚sbit P15=P1^5; //将P15位定义为P1.5引脚sbit P16=P1^6; //将P16位定义为P1.6引脚sbit P17=P1^7; //将P17位定义为P1.7引脚sbit P20=P2^0; //将P20位定义为P2.0引脚sbit P21=P2^1; //将P21位定义为P2.1引脚sbit P22=P2^2; //将P22位定义为P2.2引脚sbit P23=P2^3; //将P23位定义为P2.3引脚sbit P24=P2^4; //将P24位定义为P2.4引脚sbit P25=P2^5; //将P25位定义为P2.5引脚sbit P26=P2^6; //将P26位定义为P2.6引脚sbit P27=P2^7; //将P27位定义为P2.7引脚sbit P34=P3^4; //将P34位定义为P3.4引脚sbit P35=P3^5; //将P35位定义为P3.5引脚sbit P36=P3^6; //将P36位定义为P3.6引脚sbit P37=P3^7; //将P37位定义为P3.7引脚sbit P30=P3^0; //将P30位定义为P3.0引脚sbit P31=P3^1; //将P31位定义为P3.1引脚sbit BEEP=P3^2; // 蜂鸣器bit on=0;bit off=1; //运行与停止标志bit zdirection=0; //方向标志bit fdirection=0; //方向标志uchar h,l,k; //定义行键值//定义列键值uchar idata count[3]; //0-9数值储存unsigned char code Tab[ ]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //数字0~9的段码uchar keyval=0; //定义变量储存按键值uchar dat=0; //按键值uint run_i=0;uchar count_i=0;uint run=0; //需要运行的步数uint drun=0; //当前运行的步数bit flag;uint x=60;uint y=60;uint z=0;/* uint k=0; //调速按键次*//**************************************************************/ void led_delay1(void){unsigned char j;for(j=0;j<52;j++);}void beep(){uchar j;for (j=0;j<200;j++){led_delay1();BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/**************************************************************函数功能:数码管动态扫描延时**************************************************************/void led_delay(void){unsigned char j;for(j=0;j<200;j++);}/**************************************************************/**************************************************************函数功能:软件延时去抖动子程序**************************************************************/void delay20ms(void){unsigned char i,j;for(i=0;i<70;i++)for(j=0;j<60;j++);}void display(uint run){ //显示设点步数P31=1; //点亮数码管DS6P30=0;P34=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((run/100)!=0){ P0=Tab[run/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P30=1;P31=0;P34=0;P36=0;P37=0;P14=0;P15=0;if(((run%100/10)==0)&&(run/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();} //点亮数码管DS5else{ P0=Tab[run%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P37=1; //点亮数码管DS4P30=0;P34=0;P35=0;P36=0;P31=0;P14=0;P15=0;if((run/10==0)&&(run%100/10==0)&&(run%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[run%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}/*********************************************************************/void ddisplay(uint drun){ //显示运行步数P36=1; //点亮数码管DS3P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if((drun/100)!=0){P0=Tab[drun/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P35=1; //点亮数码管DS2P30=0;P34=0;P31=0;P36=0;P37=0;P14=0;P15=0;if(((drun%100/10)==0)&&(drun/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();}//点亮数码管DS5else{ P0=Tab[drun%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P34=1; //点亮数码管DS1P30=0;P31=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((drun/10==0)&&(drun%100/10==0)&&(drun%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[drun%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}void dddisplay(){ P15=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P14=0;if((fdirection==1)&&(on==1)){P0=0xbf; led_delay(); led_delay(); }P0=0xff;P14=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if(y==60){P0=0x08;led_delay(); led_delay();}if(y==50){P0=0x03; led_delay(); led_delay(); }if(y==40){P0=0x46; led_delay(); led_delay();}if(y==30){P0=0x21 ;led_delay(); led_delay();}if(y==20){P0=0x86; led_delay(); led_delay(); }if(y==10){P0=0x8e; led_delay(); led_delay();}P0=0xff;}/************************************************************** 函数功能:主函数**************************************************************/ void main(void){ x=60;P14=0;P15=0;P16=0;P17=0;EA=1;EX1=1; //允许使用外中断IT1=1; //选择负跳变来触发外中断PT0=1;ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式1TH0=0xec; //定时器T0的高8位赋初值TL0=0x78; //定时器T0的低8位赋初值TR0=1;P30=1; //启动定时器T0P34=1;P35=1;P36=1;P37=1;P31=1;P2=0xf0;while(1){if(flag){P2=0x0f; h=P2&0x0f; //所有行线置为高电平"1",所有列线置为低电平"0",并把值给hif((P2&0x0f)!=0x0f) //行线中有一位为低电平"0",说明有键按下delay20ms(); //延时一段时间、软件消抖else {keyval=16;}if(h!=0x0f) //确实有键按下{h=P2&0x0f; //读取行值P2=0xf0; //反转电位l=P2&0xf0; //读取列值k=h+l; //行列相加,为键位值if(k==0x7e) keyval=12;if(k==0x7d) keyval=0;if(k==0x7b) keyval=13;if(k==0x77) keyval=15;if(k==0xbe) keyval=1;if(k==0xbd) keyval=2;if(k==0xbb) keyval=3;if(k==0xb7) keyval=14; //键位与设定对应if(k==0xde) keyval=4;if(k==0xdd) keyval=5;if(k==0xdb) keyval=6;if(k==0xd7) keyval=11;if(k==0xee) keyval=7;if(k==0xed) keyval=8;if(k==0xeb) keyval=9;if(k==0xe7) keyval=10;}else keyval=16;dat=keyval;if((dat==10)&&(run!=0)) //正转键按下{zdirection=1; //方向标志fdirection=0;on=1; //运行与停止标志off=0;}if((dat==11)&&(run!=0)) //反转键按下{fdirection=1; //方向标志zdirection=0;on=1; //运行与停止标志off=0;}if(dat==12) //加速键{if(y==10) y=10;else y=y-10;}if(dat==13) //减速键{if(y==60) y=y;else y=y+10;}if((dat==14)&&(run!=0)) //开始键按下{ if(z==1) {on=1;}elseon=1;off=0;z=0;if((zdirection==0)&&(fdirection==0)){zdirection=1;}}if(dat==15) { z++;on=0; } //停止键按下一次if((on==0)&&(z==2)) //停止键按下二次{count[0]=0; //显示清零count[1]=0;count[2]=0;drun=0; run=0;z=0;on=0;off=1; //运行与停止标志}if((dat>=0)&&(dat<=9)&&(on==0)&&(off==1)){count[count_i]=dat;if(count[0]!=0){count_i++;}if((count_i==3)&&(on==0)&(off==1)){count_i=0;}if((count_i==0)&&(on==0)&(off==1)){ if(count[0]==0)run=0;else run=count[0]*100+count[1]*10+count[2];}if((count_i==1)&&(on==0)&(off==1)){run=count[0];}if((count_i==2)&&(on==0)&(off==1)){run=count[0]*10+count[1];}}if((dat==0)&&(on==1)){off=1;}if(dat==16);flag=0;}/*if(run!=0){*/ddisplay(drun);dddisplay();display(run);/*} */ //调用按键值的数码管显示子程序if((run==drun)&&run!=0){on=0;off=1;beep();drun=0; run=0;count[0]=0; //显示清零count[1]=0;count[2]=0;count_i=0;}}}/**************************************************************外部中断键盘扫描键值保存在dat中******************************************************************************* ************/void Interrupt1() interrupt 2 using 3{flag=1;}/*************************************************************************/ void Interrupt2() interrupt 1 using 1{ TR0=0;EX1=1;TH0=0xec;TL0=0x78;x--;if(x==0){if((zdirection==1)&&(fdirection==0)&&(on==1)&&(off==0)){P1=FFW[run_i];fdirection=0;led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((zdirection==0)&&(fdirection==1)&&(on==1)&&(off==0)){P1=REV[run_i];led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时zdirection=0;drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((on==0)&&(off=1))P1=0x00; x=y;}TR0=1;}。
STC增强型51单片机利用PWM脉冲控制4个57步进电机的编程方法

IAP15W4K58S4单片机利用PWM脉冲控制4个步进电机的编程方法最近购入一块IAP15W4K58S4(图1)的STC单片机的最小系统,然后用它控制步进电机,步进电机驱动器为基于TB6600的MicroStep Driver(图2)驱动器。
为了能控制该驱动器,利用现有的单片机系统控制驱动器。
连接电路原理图如图3所示,图中Vcc=5V.图1 IAP15W4K58S4单片机最小系统图2 步进电机驱动器使IAP15W4K58S4单片机能够控制步进电机,首先需要产生PWM脉冲,本例子产生频率为1KHz,占空比为50%的脉冲,P2.1、P2.2、P2.3、P3.7口输出4路PWM脉冲。
生产PWM脉冲,单片机涉及到的寄存器(不考虑PWM中断)有P_SW2(端口配置寄存器)、PWMCFG(PWM配置寄存器,初始电平高低)、PWMCKS(PWM时钟选择寄存器)、由PWMCH(高7位)和PWMCL(低8位)组成的15位PWM计数器、由PWM n T1H、PWM n T1L和PWM n T2H、PWM n T2L组成的PWM脉冲翻转计数器(其中PWM n T1H、PWM n T1L组成第一次翻转15位计数器,其中PWM n T2H、PWM n T2L组成第二次翻转15位计数器,n取值范围为2、3、4、5、6、7)、PWM n CR(PWM n的控制寄存器,设置输出管脚选择和中断使能控制,n取值范围为2、3、4、5、6、7)和PWMCR(PWM控制寄存器,用于开启各个端口和PWM模块开关,该寄存器最后设置)。
由于生成PWM,需将I/O 口配置为准双向口或强推挽模式,所以还需配置P m M0和P m M1寄存器,m取值范围为0~3。
以上寄存器各个位配置可参考该单片机的数据手册,本项目的例程参考STC官方例程基础进行修改,如后文所述。
IAP15W4K58S4单片机的特殊功能寄存器区中要使用扩展的特殊功能寄存器需要配置P_SW2的bit7位,将其(bit7)置1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include <AT89X51.h>
static unsigned int count; //计数
static int step_index; //步进索引数,值为0-7
static bit turn; //步进电机转动方向
static bit stop_flag; //步进电机停止标志
static int speedlevel; //步进电机转速参数,数值越大速度越慢,最小值为1,速度最快
static int spcount; //步进电机转速参数计数
void delay(unsigned int endcount); //延时函数,延时为endcount*0.5毫秒
void gorun(); //步进电机控制步进函数
void main(void)
{
count = 0;
step_index = 0;
spcount = 0;
stop_flag = 0;
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
EA = 1; //允许CPU中断
TMOD = 0x11; //设定时器0和1为16位模式1
ET0 = 1; //定时器0中断允许
TL0 = 0x0C; //设定时每隔0.5ms中断一次 TR0 = 1; //开始计数
turn = 0;
speedlevel = 2;
delay(10000);
speedlevel = 1;
do{
speedlevel = 2;
delay(10000);
speedlevel = 1;
delay(10000);
stop_flag=1;
delay(10000);
stop_flag=0;
}while(1);
}
//定时器0中断处理
void timeint(void) interrupt 1
{
TH0=0xFE;
TL0=0x0C; //设定时每隔0.5ms中断一次 count++;
spcount--;
if(spcount<=0)
{
spcount = speedlevel;
gorun();
}
}
void delay(unsigned int endcount)
{
count=0;
do{}while(count<endcount);
}
void gorun()
{ if (stop_flag==1)
{
P1_0 = 0;
P1_2 = 0;
P1_3 = 0;
return;
}
switch(step_index) {
case 0: //0
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
break;
case 1: //0、1
P1_0 = 1;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break;
case 2: //1
P1_0 = 0;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break;
case 3: //1、2
P1_0 = 0;
P1_1 = 1;
P1_2 = 1;
P1_3 = 0;
break;
case 4: //2
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 0;
break;
case 5: //2、3
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 1;
break;
case 6: //3
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
break;
case 7: //3、0
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
}
if (turn==0)
{
step_index++;
if (step_index>7) step_index=0; }
else
{
step_index--;
if (step_index<0) step_index=7; }
}。