360度舵机控制角度的pwm值
详细的舵机控制原理资料
目录一.舵机PWM信号介绍 (1)1.PWM信号的定义 (1)2.PWM信号控制精度制定 (2)二.单舵机拖动及调速算法 (3)1.舵机为随动机构 (3)(1)HG14-M舵机的位置控制方法 (3)(2)HG14-M舵机的运动协议 (4)2.目标规划系统的特征 (5)(1)舵机的追随特性 (5)(2)舵机ω值测定 (6)(3)舵机ω值计算 (6)(4)采用双摆试验验证 (6)3.DA V的定义 (7)4.DIV的定义 (7)5.单舵机调速算法 (8)(1)舵机转动时的极限下降沿PWM脉宽 (8)三.8舵机联动单周期PWM指令算法 (10)1.控制要求 (10)2.注意事项 (10)3.8路PWM信号发生算法解析 (11)4.N排序子程序RAM的制定 (12)5.N差子程序解析 (13)6.关于扫尾问题 (14)(1)提出扫尾的概念 (14)(2)扫尾值的计算 (14)一.舵机PWM信号介绍1.PWM信号的定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
目前,北京汉库的HG14-M舵机可能是这个过渡时期的产物,它采用传统的PWM协议,优缺点一目了然。
优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM格式。
但是它是一款数字型的舵机,其对PWM信号的要求较低:(1)不用随时接收指令,减少CPU的疲劳程度;(2)可以位置自锁、位置跟踪,这方面超越了普通的步进电机;图1-1其PWM格式注意的几个要点:(1)上升沿最少为0.5mS,为0.5mS---2.5mS之间;(2)HG14-M数字舵机下降沿时间没要求,目前采用0.5Ms就行;也就是说PWM波形可以是一个周期1mS的标准方波;(3)HG0680为塑料齿轮模拟舵机,其要求连续供给PWM信号;它也可以输入一个周期为1mS的标准方波,这时表现出来的跟随性能很好、很紧密。
关于51单片机控制舵机(减速电机类似)的详解

sfr CCAPM0=0xDA;//PCA 模块 0 的工作模式寄存器
//--------------------------------------//7 1 0 //- ECMn CAPPn CAPNn MATn T0Gn PWMn ECCFn 6 5 4 3 2
//--------------------------------------//ECOMn:使能比较器, 1 时使能比较器 功能 //CAPPn:正捕获,1 时使能上升沿捕 获 //CAPNn:负捕获,1 时使能下降沿捕 获 //MATn:匹配:1 时,PCA 计数器的值与
//---------------------------------------------//ECF:PCA 计数溢出中断使能:1 时, 使能 寄存器 CCON CF 位的中断。0 时禁止该功能。
sfr CL=0xE9;//CL 和 CH 为正在自由递增计数的 16 位 PCA 定时器的值。
sfr CH=0xF9; /***PWM0 相关特殊功能寄存器***/ sfr CCAP0L=0xEA;//PCA 模块 0 的捕捉/比较寄存器低 8 位 sfr CCAP0H=0xFA;//PCA 模块 0 的捕捉/比较寄存器高 8 位
//-------------------------------//CIDL:计数阵列空闲控制,0 时,空闲 模式下 PCA 计数器继续工作;1 时空闲模式 PCA 停止工作。
//--------------------------------------------//CPS2 CPS1 CPS0: PCA 计数脉冲选择 //000:系统时钟,FOSC/12 //001:系统时钟,FOSC/2 //010:定时器 0 的溢出,可实现可调频 率 PWM 输出
单片机舵机角度控制

单片机舵机角度控制章节一:绪论近年来,随着科技的发展和应用领域的不断扩大,单片机成为了现代电子技术领域中不可或缺的一部分。
单片机舵机角度控制作为其中一个重要的应用,广泛应用于机器人、航模等领域。
本文旨在探讨单片机舵机角度控制的原理和实现方法,以及相关的优化方案。
章节二:单片机舵机角度控制的原理2.1 舵机的基本原理舵机是一种用来控制角度的驱动器件,它内部包含电机、减速机构和位置反馈装置。
其工作原理是通过控制电机的旋转方向和速度来调整舵机的输出角度。
2.2 单片机舵机控制的原理单片机作为舵机控制的核心部件,可以通过PWM信号来控制舵机的转动角度。
通过控制PWM信号的占空比,可以控制电机的转速,从而实现对舵机角度的精确控制。
章节三:单片机舵机角度控制的实现方法3.1 硬件设计舵机角度控制的硬件设计包括舵机的连接方式和电源电路的设计。
选择合适的舵机连接方式可以减少电源负载和电源干扰,提高舵机的响应速度和精度。
3.2 软件设计单片机舵机角度控制的软件设计包括舵机控制程序的编写和舵机角度的校正算法。
舵机控制程序主要负责控制PWM信号的产生,并根据需要调整舵机的角度;舵机角度的校正算法则是为了保证舵机能够精确控制到指定的角度。
章节四:单片机舵机角度控制的优化方案4.1 控制算法优化针对舵机在转动过程中的非线性特性和稳定性问题,可以采用PID控制算法进行优化。
PID控制算法通过对误差、偏差和积分项的综合计算,实现对舵机角度控制的精确调整和快速响应。
4.2 硬件优化通过选用高精度的舵机和高性能的电源电路,可以提高舵机的控制精度和响应速度。
另外,合理设计电路板布局和降低信号干扰也是硬件优化的关键。
总结:本文首先介绍了单片机舵机角度控制的原理,包括舵机的基本原理和单片机控制舵机的原理。
然后详细讨论了单片机舵机角度控制的实现方法,包括硬件设计和软件设计。
最后,针对单片机舵机角度控制存在的问题和局限性,提出了优化方案,包括控制算法优化和硬件优化。
舵机角度控制原理

舵机角度控制原理
舵机是一种常见的电机驱动装置,用于控制物体的角度位置。
它由电机、减速装置和反馈控制系统组成,通过控制电机的旋转方向和速度,以实现对舵机输出角度的控制。
舵机的控制原理主要包括以下几个方面:
1. PWM信号控制:舵机通常使用PWM(脉宽调制)信号进
行控制。
PWM信号的高电平时间决定了舵机输出角度的位置,通常情况下,1ms的高电平时间代表舵机输出角度为0度,
2ms的高电平时间代表舵机输出角度为180度。
控制系统通过
改变PWM信号的高电平时间,可以实现对舵机输出角度的控制。
2. 位置反馈:舵机一般都内置了位置反馈装置,通常采用电位器或编码器来实现。
通过位置反馈装置,控制系统可以实时监测舵机的输出角度,从而提供给反馈控制系统进行比较和调整。
这样可以保证舵机输出角度的准确性和稳定性。
3. PID控制算法:PID控制算法是一种常用的控制算法,用于
实现舵机输出角度的精确控制。
PID控制算法根据当前输出角
度与目标输出角度之间的差异,计算出一个控制量,用于调节舵机的电机驱动电压或电流。
PID控制算法可以根据具体应用
的需求进行调优,以实现良好的控制性能。
总结起来,舵机角度控制的原理主要是通过PWM信号控制舵
机的输出角度,借助位置反馈装置实现对输出角度的实时监测
和调整,使用PID控制算法对舵机的驱动电压或电流进行调节,以实现精确且稳定的角度控制。
舵机的角度控制

计算机控制实验报告题目:舵机的角度控制院(系):电子工程与自动化学院专业:智能科学与技术学生姓名:学号:指导教师:赵学军2016年7月02日一、实验题目舵机的角度控制二、实验内容在PROTEUS软件下用MOTOR-PWMSERVO作为控制对象,单片机发送PWM信号给舵机实现转角控制,4*4键盘给定,参数LCD显示;三、实验要求1、根据给定题目设计Proteus仿真原理图;2、根据给定题目设计有关的C语言源程序,并编译成可执行文件;3、在Proteus仿真界面下运行程序实现给定的功能四、实验设计(一)实验思路1.14*4矩阵键盘概述1.2舵机的基本概述舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置;五、具体设计思路例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。
用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
五、心得体会本次实验中,通过实际动手自己设计并实现在PROTEUS软件下用MOTOR-PWMSERVO作为控制对象,单片机发送PWM信号给舵机实现转角控制,4*4键盘给定,参数LCD显示,不仅加深了我对计算机控制课程理论知识的理解,同时也进一步认识到了计算机的广泛应用。
航模pwm信号的脉宽
航模pwm信号的脉宽
航模PWM信号的脉宽是控制航模飞行的重要参数。
在航模飞行中,PWM信号的脉宽通常用来控制舵机的转动角度或电调的电机转速。
脉宽的变化可以精确地调节飞行器的动作,使其实现各种飞行动作和姿态控制。
航模PWM信号的脉宽一般以微秒(μs)为单位,通常在1000μs到2000μs之间变化。
在这个范围内,脉宽越大,舵机转动的角度或电机的转速就越高。
脉宽为1000μs时,舵机或电机通常处于最小角度或最低转速状态;脉宽为2000μs时,舵机或电机通常处于最大角度或最高转速状态。
通过改变PWM信号的脉宽,我们可以控制航模的各个部件,实现航模的起飞、降落、转弯、爬升等各种动作。
例如,当我们将PWM 信号的脉宽设为1500μs时,舵机或电机通常处于中间位置,航模保持平飞状态;当脉宽增大到1700μs时,舵机或电机会相应地增加转动角度或转速,航模开始向左转弯;当脉宽减小到1300μs时,舵机或电机会相应地减小转动角度或转速,航模开始向右转弯。
航模PWM信号的脉宽可以通过遥控器或飞控系统进行调节。
遥控器通常具有油门、方向和俯仰等控制杆,通过操纵这些控制杆,我们可以改变遥控器发送的PWM信号的脉宽,从而实现对航模的控制。
飞控系统则是一种集成了传感器和处理器的智能控制系统,可以根据飞行器的姿态和环境信息,自动调节PWM信号的脉宽,实
现自稳、定点、自动返航等飞行模式。
总结起来,航模PWM信号的脉宽是控制航模飞行的关键参数,通过改变脉宽的大小,我们可以实现航模的各种飞行动作和姿态控制。
这一技术的应用不仅在航模飞行中具有重要意义,还在其他领域如机器人控制、自动驾驶等方面有广泛的应用前景。
舵机控制pwm

舵机控制pwm第一章:引言(200字左右)舵机是一种常见的电子设备,它被广泛应用于工业自动化、机器人技术、航空航天等领域。
舵机的核心是PWM(脉宽调制)信号控制技术,通过调节PWM信号的占空比来控制舵机的角度位置。
本论文将重点介绍舵机控制中的PWM信号生成原理和控制算法,并深入分析其应用领域和优势。
第二章:PWM信号生成原理(300字左右)PWM信号是指固定频率和变化占空比的方波信号,它的占空比决定了舵机的角度位置。
PWM信号的生成基于定时器的工作原理,通过不断计数和比较产生特定占空比的脉冲信号。
定时器的计数周期固定,根据所设定的比较值来确定高电平的持续时间,从而控制舵机的旋转角度。
Pulse Width Modulation技术的优势在于能够精确控制舵机位置,并具有速度快、响应高、功耗低等特点。
第三章:舵机控制算法(300字左右)舵机控制算法主要分为位置控制和速度控制两种。
位置控制通过设定目标位置和当前位置的误差,利用PID(比例、积分、微分)控制算法来调节PWM信号的占空比,使舵机迅速达到目标位置并保持稳定。
速度控制则通过设定目标速度和当前速度之间的误差,根据系统的动态特性利用传统PID或者自适应控制算法来调节PWM信号的占空比,实现舵机的平滑运动。
这些控制算法需要根据具体应用需求进行优化和调整,以达到最佳控制效果。
第四章:舵机控制应用与未来发展方向(200字左右)舵机控制技术广泛应用于机器人、工业自动化、航空航天等领域。
在机器人领域,舵机可用于机器人臂、腿部关节的控制,实现多自由度的运动。
在工业自动化应用中,舵机可用于控制机械臂的旋转和伸缩操作。
航空航天领域也常用舵机来控制飞行器的舵和尾翼等部件。
未来,随着自动化技术的不断发展,舵机控制将更加智能化和精确化,并可能融合更多新的技术,如人工智能、机器学习等,进一步拓展舵机在各个领域的应用范围。
第四章:舵机控制应用与未来发展方向(续)(1000字左右)4.1 机器人应用舵机在机器人领域有着广泛的应用,机器人的各个关节可以通过舵机控制实现灵活的运动。
舵机数据资料

五、PCA9685测量值 pulse_width
角度 实际值 计算值
190 2.59 2.59
180 2.48 2.48
135 2.0 1.985
90 1.49 1.49
45 1.0 0.995
date=4096*((angle*11)+500)/20000 #进行四舍五入运算 date=int(4096*((angle*11)+500)/(20000)+0.5)
pwm.set_pwm(channel, 0, date)
二、SG90厂家给出的技术数据:
尺寸:21.5mmX11.8mmX22.7mm
重量:9克 (1kg=1公斤=2斤)
无负载速度:0.12秒/60度(4.8V) 0.002s/度
堵转扭矩:1.2-1.4公斤/厘米(4.8V)
使用温度:-30~~+60摄氏度
死区设定:7us (7MHZ)
工作电压:4.8V-6V
date/4096=pulse_width/20 ->有上pulse_width的计算结果得date=4096*( ((angle*11)+500)/1000 )/20 -->int date=4096((angle*11)+500)/20000;
def set_servo_angle(channel, angle): #输入角度转换成12^精度的数值
-10 0.39 0.39
4、舵机控制系统工作稳定,PWM占空比 (0.5~2.5ms 的正脉冲宽度)和舵机的转角(-90°~90°)线性度较好
舵机的控制需要一个20ms左右的时基脉冲(1/0.020s=50HZ),该脉冲的高电平部分为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是:
舵机测试报告
舵机测试报告经过这段时间对舵机的测试,我现在将测试舵机的一些成果和心得记录下来。
以下未必是舵机可能出现的所有问题,但已经可以对实验室现有的舵机进行充分利用。
一、舵机的原理控制信号由接受通道进入调制芯片,获得直流偏置电压。
它内部含有一个基准电路,产生周期为20ms,宽度为1.5ms的基准电压,将获得的直流偏置电压与电位器的电压比较,获得电压输出。
最后电压差的正负输出到电机驱动芯片,决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压为0,电机停止转动。
以180°角度舵机为例,舵机的控制需要制作20ms周期的时基脉冲,用以和舵机内部基准电压作比较,该脉冲的高电平部分一般为0.5ms到2.5ms范围内的角度控制脉冲部分。
以1.5ms为0°标定,即0.5ms为-90°,1.0ms为-45°,1.5ms为0°,2ms为45°,2.5ms 为90°。
但实际舵机大部分并非180°范围,这里使用180°范围是为了方便举例,建议实际使用时角度控制为0°范围正负60°内,即120°范围内使用舵机。
很多舵机的位置等级有1024个,如果舵机的有效角度范围为180°,其控制的角度精度可以达到180°/1024约为0.18°,即要求的脉宽控制精度为2000/1024us约2us。
由于单片机采用定时器中断模拟PWM信号输出,单片机无法达到2us的控制精度,本报告采用两种单片机,控制角度精度为别达到9°和0.9°,稍后会有介绍二、舵机控制PWM脉宽调制值的设定设所选单片机的晶振频率为fosc,AT89S52单片机机的T=12/fosc,定时器中断采用方式2,8位自动重装定时器,定位100us 中断一次,初值等于100/T。
在定时器中断服务程序中使用两个全局变量,一个变量控制高电平时间,一个变量控制低电平时间,两个变量的和为20*1000/100=200,控制PWM脉宽即控制这两个变量的值。
舵机控制方式
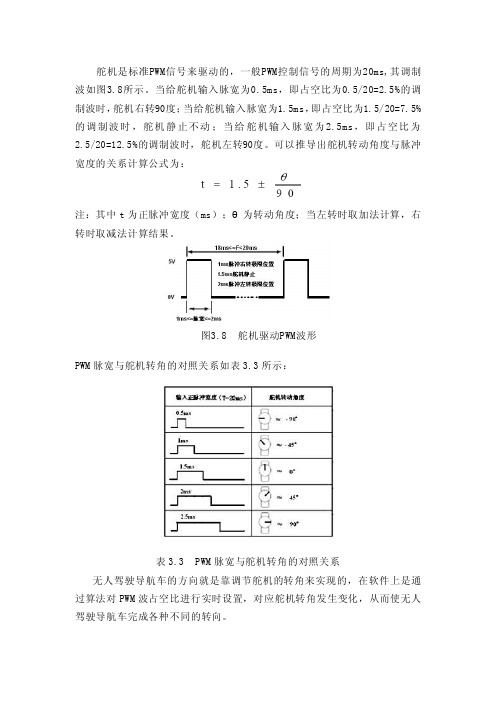
舵机是标准PWM信号来驱动的,一般PWM控制信号的周期为20ms,其调制波如图3.8所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。
可以推导出舵机转动角度与脉冲宽度的关系计算公式为:
注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。
图3.8 舵机驱动PWM波形
PWM脉宽与舵机转角的对照关系如表3.3所示:
表3.3 PWM脉宽与舵机转角的对照关系
无人驾驶导航车的方向就是靠调节舵机的转角来实现的,在软件上是通过算法对PWM波占空比进行实时设置,对应舵机转角发生变化,从而使无人驾驶导航车完成各种不同的转向。
单片机PWM舵机控制原理
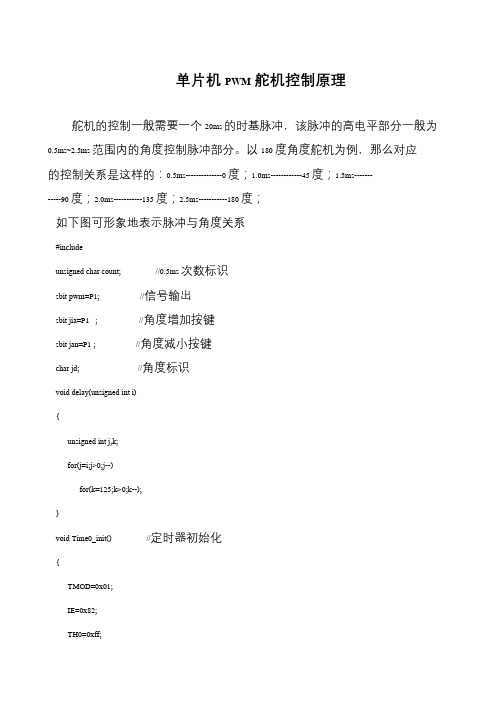
单片机PWM舵机控制原理舵机的控制一般需要一个20ms 的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。
以180 度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0 度;1.0ms------------45 度;1.5ms------- -----90 度;2.0ms-----------135 度;2.5ms-----------180 度;如下图可形象地表示脉冲与角度关系#includeunsigned char count; //0.5ms 次数标识sbit pwm=P1; //信号输出sbit jia=P1;//角度增加按键sbit jan=P1 ; //角度减小按键char jd; //角度标识void delay(unsigned int i){unsigned int j,k;for(j=i;j>0;j--)for(k=125;k>0;k--);}void Time0_init() //定时器初始化{TMOD=0x01;IE=0x82;TH0=0xff;TL0=0x19; //12 晶振,0.25msTR0=1; //定时器开始}void Time0_int() interrupt 1 //中断程序{TH0=0xff;TL0=0x19;if(count pwm=1;elsepwm=0; //其余输出低电平count++;count=count%40; //时钟保持40 个count 即20ms }void keyscan() //按键扫描{if(jia==0) //角度增加键是否按下{delay(50); //按下延时,消抖if(jia==0){jd++; //角度标识加1count=0; //按键按下,则20ms 周期重新开始if(jd==50)jd=9; //已经是180°则保持while(jia==0); //等待按键放开}}if(jan==0) //角度减小键是否按下{delay(10);if(jd==0);{jd--; //角度标识减1count=0;if(jd==0)jd=1;while(jan==0);}}}void main(){jd=1;count=0;Time0_init();while(1){keyscan();// display();}}tips:感谢大家的阅读,本文由我司收集整编。
舵机测试报告
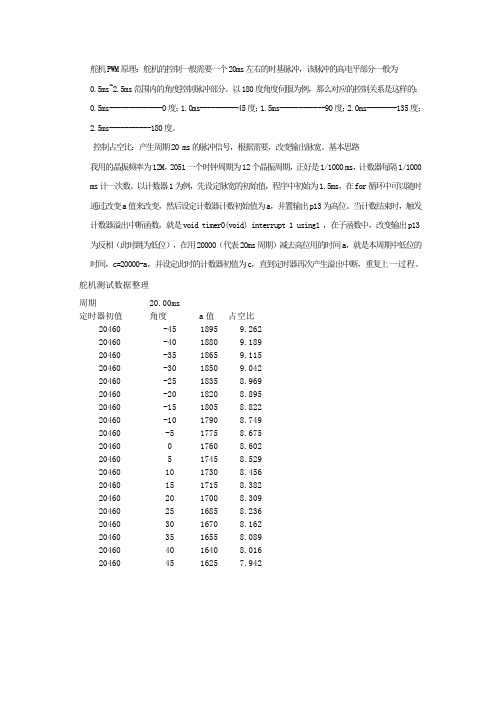
舵机PWM原理:舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms----------45度;1.5ms------------90度;2.0ms--------135度;2.5ms-----------180度。
控制占空比:产生周期20 ms的脉冲信号,根据需要,改变输出脉宽。
基本思路我用的晶振频率为12M,2051一个时钟周期为12个晶振周期,正好是1/1000 ms,计数器每隔1/1000 ms计一次数。
以计数器1为例,先设定脉宽的初始值,程序中初始为1.5ms,在for循环中可以随时通过改变a值来改变,然后设定计数器计数初始值为a,并置输出p13为高位。
当计数结束时,触发计数器溢出中断函数,就是void timer0(void) interrupt 1 using1 ,在子函数中,改变输出p13为反相(此时跳为低位),在用20000(代表20ms周期)减去高位用的时间a,就是本周期中低位的时间,c=20000-a,并设定此时的计数器初值为c,直到定时器再次产生溢出中断,重复上一过程。
舵机测试数据整理周期20.00ms定时器初值角度a值占空比20460 -45 1895 9.26220460 -40 1880 9.18920460 -35 1865 9.11520460 -30 1850 9.04220460 -25 1835 8.96920460 -20 1820 8.89520460 -15 1805 8.82220460 -10 1790 8.74920460 -5 1775 8.67520460 0 1760 8.60220460 5 1745 8.52920460 10 1730 8.45620460 15 1715 8.38220460 20 1700 8.30920460 25 1685 8.23620460 30 1670 8.16220460 35 1655 8.08920460 40 1640 8.01620460 45 1625 7.942角度是从-45度到+45度之间19个数值。
舵机注意点

舵机的调节角度为0—180度,脉宽调节范围是:0.5-2.5ms
360度连续旋转舵机:
信号端只要输入一个50HZ的方波信号,然后控制信号周期的高电平脉冲持续的时间就可以控制速度和正反转及停转。一个高电平脉冲持续的时间对应一个速度。高电平为1毫秒~1.5毫秒时,舵机正秒时舵机停转),高电平为1.5毫秒~2毫秒时舵机反转(1.5毫秒时舵机停转,越接近2毫秒反转的速度越快,2毫秒时以最快的速度反转)。
高电平脉冲的时间0.5ms的话,舵机转到0度,1ms -45度 1.5ms--90度 2ms--135度2.5ms-180度,只能在0.5~2.5ms之间调节,转动0到180度任意角度,你只要控制PWM波的高电平占空比就要可以达到自己想要的转动角度。
红色的就是电源正极。。白色或者橙色是信号级,,黑色或者棕色的,是负极电源
舵机pwm控制原理
舵机PWM控制原理
PWM(Pulse Width Modulation)控制是一种通过控制脉冲宽度来控制输出信号的技术。
对于舵机而言,PWM控制可以通过控制舵机的电流来控制舵机的位置和速度。
舵机的PWM控制原理如下:
1. 舵机接收PWM信号,其中高电平表示舵机需要保持静止,低电平表示舵机需要转动。
2. 舵机根据接收到的PWM信号,通过内部电路将低电平信号转换为舵机转动的电流,而高电平信号则被忽略。
3. 舵机根据接收到的PWM信号的周期和占空比来计算舵机的转动角度和速度。
4. 舵机通过内部的位置反馈系统来检测舵机的位置和速度,并根据反馈信号来调整舵机的转动角度和速度。
舵机的PWM控制可以通过调整PWM信号的占空比来控制舵机的转动角度和速度。
占空比越大,舵机转动的角度和速度就越大;占空比越小,舵机转动的角度和速度就越小。
通过调整PWM信号的占空比,可以实现对舵机的精确控制。
舵机控制说明

舵机的分类按照舵机的转动角度分有180度舵机和360度舵机。
180度舵机只能在0度到180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度。
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。
关于PWM信号在3.4节将会介绍。
3.2 舵机的内部结构一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)。
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线。
其中电源线为舵机提供6V到7V左右电压的电源。
3.3 舵机的工作原理在舵机上电后,舵机的控制电路会记录由位置反馈电位计反馈的当前位置,当信号线接收到PWM信号时会比较当前位置和此PWM信号控制所要转到得位置,如果相同舵机不转,如果不同,控制芯片会比较出两者的差值,这个差值决定转动的方向和角度。
3.4 舵机的控制协议对舵机转动的控制是通过PWM信号控制的。
PWM是脉宽调制信号的英文缩写,其特点在于它的上升沿与下降沿的时间宽度或者上升沿占整个周期的比例(占空比)。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
本书介绍的舵机控制协议是北京汉库公司出品的舵机所采用的协议 ,市场上一些其他厂商(包括有些日本厂商)生产的舵机也采用这种协议。
如果你采用的是其它厂商的舵机,最好先参考下他们的DATA手册或者产品说明之类的技术文档。
前面说过舵机分180度和360度,它们的应用场合不一样,工作方式不一样,自然控制的协议也不一样。
360度舵机控制方法
360度舵机控制方法Chapter 1: IntroductionIntroduction:In recent years, 360-degree servos have gained significant popularity in the field of robotics due to their ability to achieve full rotational movement. Unlike traditional servos that offer limited rotational range, 360-degree servos provide a complete revolution, allowing for enhanced mobility and versatility in various applications. This paper aims to explore and discuss methods of controlling 360-degree servos effectively.Chapter 2: Overview of 360-degree Servo2.1 Operating Principle:A 360-degree servo consists of a motor, position feedback mechanism, electronic control circuitry, and gears. The motor rotates the servo's shaft, which is then transmitted to the output shaft through a set of gears. The feedback mechanism ensures accurate positioning by sensing the output shaft's position and feeding it back to the control circuitry.2.2 Control Modes:360-degree servos can be controlled in two modes: position control and continuous rotation control. In position control mode, the servo moves to a specific angle and holds that position until a new command is given. Continuous rotation control mode allows the servo to rotate continuously in either direction, enabling it to act as a wheel or drive mechanism.Chapter 3: Methods for Controlling 360-degree Servos3.1 Pulse-Width Modulation (PWM):One commonly used method to control 360-degree servos is through pulse-width modulation (PWM). PWM generates a series of pulses with varying pulse widths, where the servo interprets the pulse width as a specific position. For example, a 1.5 ms pulse might correspond to the servo being at its neutral position, whereas a 1.0 ms pulse might indicate full anti-clockwise rotation, and a 2.0 ms pulse might indicate full clockwise rotation.3.2 Microcontroller-Based Control:Microcontrollers provide a versatile platform for controlling 360-degree servos. They can generate PWM signals based on the desired position, allowing for precise and programmable control. Additionally, microcontrollers can interface with other sensors or input devices, enabling more advanced control mechanisms such as closed-loop control or autonomous operation.3.3 Control Algorithms:Various control algorithms can be utilized to achieve accurate and smooth control of 360-degree servos. Proportional-Integral-Derivative (PID) control is a classic algorithm used for position control. By comparing the desired position with the actual position and adjusting the servo's input voltage accordingly, PID control minimizes the error between the desired and actual positions. Other algorithms, such as fuzzy logic control or neural networks, can also be explored for more advanced control applications.Chapter 4: ConclusionIn conclusion, this paper provides an overview of 360-degree servos and discusses different methods for controlling them effectively. PWM and microcontroller-based control are commonly employed techniques, while PID control algorithmsoffer precise position control. However, this field remains open for further research and exploration, including the development of more sophisticated control algorithms and advanced applicationsfor 360-degree servo control. With their enhanced mobility and versatility, 360-degree servos are expected to continue playing a crucial role in the field of robotics.好的,下面是一篇大约1000字的相关内容:人类对于艺术的追求是一种深深根植于我们灵魂深处的本能。
最新AX-12数字舵机工作原理

整理的AX-12 资料控制原理程序:时间仓促。
弄的不是很整齐,有什么问题,请直接联系我!~~概述:Dynamixel系列机器人驱动器是一个很流行模块化的驱动器,其由齿轮减速器、精密直流电机和具有串联功能的电路板分别单一封装组成。
尽管它体积小巧紧凑,但它可以产生很大扭矩,加上高品质材料制造并具有一定的强度,可以抵御一定外部冲击。
它具有检测内部温度功能,例如改变内部温度和供电电压。
AX-12+数字伺服电机不像一般的R/C微伺服电机(舵机)使用PWM(脉冲宽度调制)控制,其需要使用CM-5 Dynamixel AX12+伺服电机专用控制器控制。
当用做关节电机时,可以旋转0~300°;当用作轮子驱动时,可以选择360°连续旋转模式。
更重要的是AX-12+提供了高达16kg·cm的扭矩,是一般数字舵机的2倍。
下面是AX-12舵机的主要技术参数:AX-12+规格参数:1.重量:55g2.齿轮减速比:1/2543.扭矩:12kg·cm(7V);16.5kg·cm(10V)4.速度:0.269秒/60度(7V);0.196秒/60度(10V)5.最小分辨率:0.35°6.最大运行角度:300°(有位置控制);360°连续旋转(无位置控制)7.电压:7V~10V (推荐供电:9.6V)8.最大电流:900mA9.工作温度:-5 ~ +85℃10.控制信号:数字信号11.通讯协议:半双工异步串行通信12.通讯设置:(数据位8、停止位1、无奇偶效验)13.Link 方式:TTL-Daisy总线14.ID数:254ID (0~253)15.通讯速率:7343bps ~ 1 Mbps16.反馈:位置、温度、负载、电压17.材质:工业塑料18.报警功能:当内部温度、扭矩、供电电压超过额定范围时,电机主动反馈实时情况。
此种紧急状况,电机会闪动LED指示灯或停止输出扭矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
360度舵机控制角度的pwm值
摘要:
1.360 度舵机的特点和控制方法
2.PWM 值的概念和作用
3.如何通过PWM 值控制360 度舵机的角度
4.实例代码说明
正文:
一、360 度舵机的特点和控制方法
360 度舵机是一种可以旋转360 度的舵机,它通常用于机器人、无人机等领域。
与常见的180 度舵机相比,360 度舵机可以提供更多的旋转范围。
然而,360 度舵机不能像180 度舵机那样控制角度,它只能控制方向和速度。
二、PWM 值的概念和作用
PWM(Pulse Width Modulation)值,即脉冲宽度调制值,是一种用来控制舵机旋转速度和方向的方法。
PWM 值是一种占空比,它表示脉冲信号中高电平所占的时间比例。
在360 度舵机控制中,通过改变PWM 值的大小,可以控制舵机的旋转速度和方向。
三、如何通过PWM 值控制360 度舵机的角度
要通过PWM 值控制360 度舵机的角度,需要使用一个单片机或微控制器来生成和输出PWM 信号。
以下是一个简单的示例,说明如何使用Arduino 单片机控制360 度舵机的旋转角度:
1.首先,需要安装Arduino 的servo 库,该库提供了用于控制舵机的函
数。
在Arduino IDE 中,选择“工具”>“管理库”,搜索“servo”,然后安装。
2.上传以下代码到Arduino 板:
```c
#include <Servo.h>
// 创建一个Servo 对象,用于控制舵机
Servo servo;
void setup() {
// 初始化servo 对象,将引脚9 连接到舵机
servo.attach(9);
}
void loop() {
// 设置舵机的角度
servo.write(180);
delay(1000);
// 设置舵机的角度
servo.write(0);
delay(1000);
}
```
这段代码首先引入了Servo 库,然后创建了一个名为servo 的对象。
在setup() 函数中,初始化servo 对象,并将引脚9 连接到舵机。
在loop()
函数中,使用servo.write() 函数设置舵机的角度,并通过delay() 函数延迟一段时间后,再次设置舵机的角度。
四、实例代码说明
在上述示例代码中,我们使用servo.write() 函数设置舵机的角度。
该函数接受一个角度值作为参数,将舵机旋转到指定的角度。
在这个例子中,我们将舵机旋转到0 度和180 度。
当然,你可以根据需要设置其他角度值。
此外,还可以使用其他库和方法来控制360 度舵机,例如使用PID 控制、模糊控制等。