SUSAN检测算法概述
一种改进的SUSAN算子棋盘格角点亚像素检测算法
文 章 编 号 :0 62 7 (0 2 0 -0 40 10 - 5 2 1 ) 10 6 - 4 3
计 算 机 与 现 代 化 J U N IY I N A H A I A J U XA D I U S
第 17期 9
一
种 改进 的 S S N算子 棋 盘格 角 点亚像 素检 测算 法 UA
王 瑞 杨润泽 尹 晓春 罗志海 , , ,
(. 1 军械 工程 学院机械 制造教研 室, 河北 石 家庄 0 00 ; . 50 3 2 中国人 民解放军 60 7部 队, 67 山西 大同 07 4 ) 3 04 摘要 :U A S S N算子在检测 角点 时, 只以 U A S N区域面积的大小作 为判断准则 , 忽略 U A S N区域形 状的影响。 因此 , 该算 法 对棋盘格 标定板中的内角点与边缘点难以 区分。针对此 问题 , 文提 出在 S S N圆模板 内再 次采 用 S S N算子 来 实 本 UA UA 现时棋盘格标 定板 角点的有效检测。此外, 每个初定位 角点的局部邻域 内, 用二次曲面拟合法得到 角点的亚像素 坐 在 采 标。 实验证 明 , 所提 出的算法准确 、 有效、 适应性好 , 能为摄像机标定提供 亚像素精度的角点信 息。 关键词 : 棋盘格 ; U A S S N算子 ;角点检测;亚像 素
AN’ h p n d tci g fa ue p it .I’ i c l t it g ih t e c e s o r o r n d e p it fr te S AN ag ・ S s a e i ee t e t r on s t s df u t o d s n u s h h s b ad c me s a d e g o n s o h US o n i i l ih rtm.T e eo e a oh r U A cr u a s Sa d d w ti e S S i u a s v r o i e e t h rf r n t e S N i l rma k i d e i n t U AN cr l rma k t o ec me t sd f C.Mo e v r u . S c h h c o h ro e .s b p x lc od n tsc r e s ae c c l td w t u d c S r c i ig ie o r i ae o n r r a u ae i q a r U g e f t .E p rme tlr s h h w t a te p o o e g rtm a l h i H tn x e i n a e t s s o h t h r p s d a o h h r l i s h g rcs n a d c n p o i e r l be d t r ih p e iin c mea c l r t n ih p e ii n a rv d ei l aaf g — r cs a r ai ai . o a o h o b o Ke r s c e s o r y wo d : h sb ad;S S U AN p r tr o rd tci n u - ie o e ao ;c me ee t ;s b px l o
亚像素边缘检测算法
亚像素边缘检测算法刘伟;薛国新【摘要】针对传统边缘检测算法的定位精度低、对噪声敏感等缺点,提出了Susan-Zernike亚像素边缘检测方法.首先使用Susan边缘检测算法实现边缘粗定位,然后用Zernike算子实现边缘重定位.实验表明该算法能够很好地实现亚像素定位,且运行时间较短,效率较高.%The traditional edge detection algorithm is low precision and sensitive to noise. In view of this, Susan —Zernike subpixel edge detection method is put forward. First, Susan edge detection algorithm was used to determine coarse position of edge, and then to relocate edge with the Zernike operator. The experiment showed that the proposed algorithm well realized subpixel edge detection, ran faster and had higher efficiency.【期刊名称】《常州大学学报(自然科学版)》【年(卷),期】2012(024)004【总页数】5页(P53-57)【关键词】Susan边缘检测;Zernike矩;亚像素边缘;边缘检测【作者】刘伟;薛国新【作者单位】常州大学信息科学与工程学院,江苏常州213164;常州大学信息科学与工程学院,江苏常州213164【正文语种】中文【中图分类】TP391边缘是图像的一个基本特征,对边缘的检测一直是图像处理技术中非常重要的问题。
传统的边缘检测算子,通常对噪声比较敏感,且检测一般为像素级,精度较低。
susan角点检测原理

susan角点检测原理Susan角点检测原理什么是Susan角点检测Susan角点检测是一种用于计算机视觉和图像处理领域的角点检测算法。
它是由Smith和Brady于1997年提出的,并以其中一个作者的女儿Susan的名字命名。
Susan角点检测原理•Susan算法的目标是在图像中寻找具有角点特征的像素。
角点是在图像中突然变化的地方,它们通常表示物体的边缘、拐角或交叉点。
•Susan算法通过计算像素周围邻域内灰度值的变化来确定角点。
它将邻域内的像素按照灰度值与中心像素的差异进行分类,并分别计算差异值的均值和方差。
•对于邻域内的每个像素,如果它与中心像素的灰度值差异小于一定阈值,并且与邻域内其他像素的灰度值差异大于另一个阈值,则将其判定为角点。
•Susan算法的核心思想是通过差异值均值和方差来衡量像素的纹理信息。
纹理越丰富,差异值的方差越大,说明该像素可能是一个角点。
Susan算法的优点•Susan算法对图像的亮度变化和噪声具有鲁棒性,能够在不同条件下准确地检测角点。
•Susan算法的计算速度较快,适用于实时应用,不会导致显著的性能下降。
•Susan算法不依赖于特定的图像特征,能够适应不同类型的图像。
Susan算法的应用•Susan算法广泛应用于计算机视觉、模式识别、目标跟踪等领域,其角点检测能够提供有关图像中重要特征点的信息。
•Susan算法在图像配准、图像匹配、人脸识别等任务中发挥着重要作用,能够提高算法的鲁棒性和准确性。
•Susan算法也可用于图像压缩和图像增强领域,通过提取图像中的角点特征,可以实现对图像内容的表示和处理。
总结Susan角点检测算法通过计算像素周围邻域内灰度值的变化来确定角点。
它基于差异值的均值和方差来衡量像素的纹理信息,并能够在不同条件下准确地检测角点。
该算法具有鲁棒性、计算速度快,并广泛应用于计算机视觉和图像处理领域。
通过Susan角点检测,可以提取图像中的重要特征点,并用于不同的图像分析和处理任务。
基于自适应双阈值的SUSAN算法
第 3卷 8
第3 期
钟顺虹 ,何建农 :基于 自适应 双阈值 的 S AN算法 US 311 US N面积直方图 . . A
27 0
本文使 用模板 的是一个 7 7的正方形模板 ,如图 2所示 。实 x 验证 明,方形模 板检 测到 的特征 点精 度与近 似 圆模板 相差
不大 。
用对 图像求导 ,直接对 图像灰度进行操作保 证算法 的效率 ,
定位准确 , 多个 区域 的结点能精确检测 , 对 且具有积分特性 ,
抗噪声能力较强 。文献【】 S A 4在 US N边缘特征检测算法的基 础上 ,提 出决策边缘 特征检测算法 DS S N,该算法在检测 UA 边缘细 节特征 上比 S S N 算法有较 大改善 。文 献【】 析 UA 5分 SS U AN算法在进行边缘检测时的原理 和有效性 , 在此基础上 对 S S N 算法进行边缘检测精度的改进,使边缘提取更清 UA 晰准确 ,层次感分 明。文献【—】 出 自适应 阀值 的 S S 67提 U AN
ma i m u p e so x mu s p r s i n
DoI 1 . 6 /i n10 —4 82 1.30 9 : 03 9js . 03 2 .0 20 .6 9 .s 0
1 概述
传统 的边缘 检测算 子都建 立在边 缘灰 度不连 续的理 论 上 ,这些传统的边缘检测算子主要有 :R br o et s算子 ,S b l oe
大 的 图像 ,检 测效 果 不理 想 。而 最小 核值相 似 区(ma et S ls l U iau e m n si lt gN c u , U A 算法 , 由 nvle g e t s a n u l sS S N) S A mi i e 是 英 国牛津大学 的 S t 和 B ayJM 提 出的 ,该 方法 不 mi SM h rd
角点检测
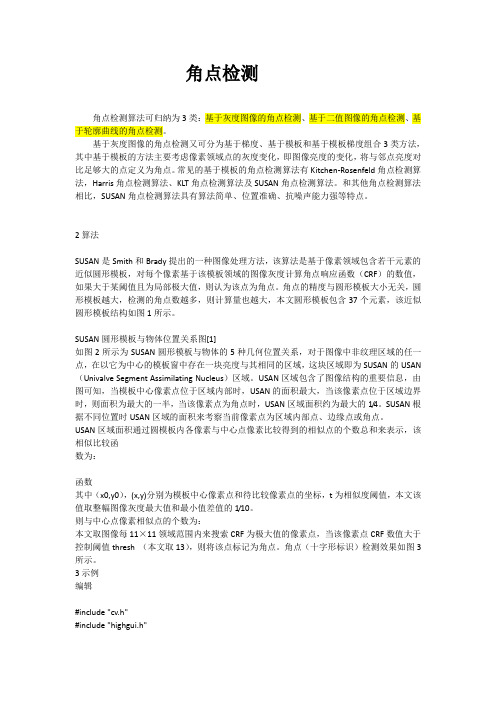
角点检测角点检测算法可归纳为3类:基于灰度图像的角点检测、基于二值图像的角点检测、基于轮廓曲线的角点检测。
基于灰度图像的角点检测又可分为基于梯度、基于模板和基于模板梯度组合3类方法,其中基于模板的方法主要考虑像素领域点的灰度变化,即图像亮度的变化,将与邻点亮度对比足够大的点定义为角点。
常见的基于模板的角点检测算法有Kitchen-Rosenfeld角点检测算法,Harris角点检测算法、KLT角点检测算法及SUSAN角点检测算法。
和其他角点检测算法相比,SUSAN角点检测算法具有算法简单、位置准确、抗噪声能力强等特点。
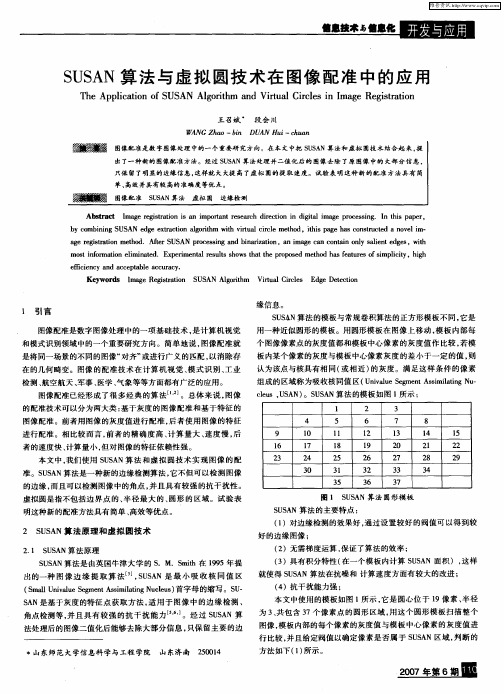
2算法SUSAN是Smith和Brady提出的一种图像处理方法,该算法是基于像素领域包含若干元素的近似圆形模板,对每个像素基于该模板领域的图像灰度计算角点响应函数(CRF)的数值,如果大于某阈值且为局部极大值,则认为该点为角点。
角点的精度与圆形模板大小无关,圆形模板越大,检测的角点数越多,则计算量也越大,本文圆形模板包含37个元素,该近似圆形模板结构如图1所示。
SUSAN圆形模板与物体位置关系图[1]如图2所示为SUSAN圆形模板与物体的5种几何位置关系,对于图像中非纹理区域的任一点,在以它为中心的模板窗中存在一块亮度与其相同的区域,这块区域即为SUSAN的USAN (Univalve Segment Assimilating Nucleus)区域。
USAN区域包含了图像结构的重要信息,由图可知,当模板中心像素点位于区域内部时,USAN的面积最大,当该像素点位于区域边界时,则面积为最大的一半,当该像素点为角点时,USAN区域面积约为最大的1/4。
SUSAN根据不同位置时USAN区域的面积来考察当前像素点为区域内部点、边缘点或角点。
USAN区域面积通过圆模板内各像素与中心点像素比较得到的相似点的个数总和来表示,该相似比较函数为:函数其中(x0,y0),(x,y)分别为模板中心像素点和待比较像素点的坐标,t为相似度阈值,本文该值取整幅图像灰度最大值和最小值差值的1/10。
SUSAN算法在快速图像匹配中的应用

应矩 阵 中提取 特 征 的多寡 ,g 小 ,所得 的特 征 点越 尖 ,提取 边缘 时 ,g 越 值
要大 些 ,一般 最大取 3 a/ 而对 于 实际有 噪声 影响 的图像 ,边 缘 的U A 抗噪 声干扰 能 力,在 利用U A值 进行 阈值 比较 时, S N
强 ,运算 速度 快 。 三 、S S 算 法在 快速 图像 匹配 中的应 用 U AN
I ■
S S U AN算法在快 速 图像 匹配 中 的应用
汪 熙 蒋晓瑜 姚 军 杜登崇
107) 0 0 2 ( 甲兵工程学院控制工程系 装 北京
[ 摘
要】 U A 算子 是一种基于 图像局部 灰度特征的算法 ,编程实现利用S S N SSN U A 算法 的实现 了快速 图像 匹配,并与常用的H r i 算子作 了对 比,结果表明 ,该算 ars
图像配 准是 图像 分析和 处 理的基 本 问题 ,从 图像 中提取 特征 点是 基于
点特 征影像 匹 配的 第一 步 ,在 计算机 视 觉 中,定 义 图像 中 出现局 部 曲率极
大值 的轮 廓 点 以及 两个 以上 边 界 的交 点为角 点 ,单 调背 景上 的孤 立 点等 。
UA 值 接近 最大 值 的四 分之 一 。在一 幅 图像 中搜 索 图像角 点 或边 缘点 ,就 SN
( ()x [,/o) 1 x :p IY (Y ) , el() XoJ c { x - ,] 一 }
其 中 ,(。Y y 模 核在 图像 中的坐 标 ,(, 为掩 模区 域其它 点 的 x ,。为掩 x ) 坐标。lx ) Ix , 。 (, (0Y )分别为点 (,)和(oY )的灰度值。阈值 f决 . y ,。 定了两 个 点相似 的最大 差异 。C 为输 出的 结果 。掩模 区域 的UA 值可 以 由式 S N
Harris与SUSAN原理及实验结果分析

Harris 与SUSAN 角点检测算法原理与实验结果分析一.Harris 算法原理Harris 角点检测算法的基本原理是取以目标像素点为中心的一个小窗口,计算窗口沿任何方向移动后的灰度变化,并用解析形式表达。
设以像素点(x,y)为中心的小窗口在X 方向上移动u ,y 方向上移动v ,Harris 给出了灰度变化度量的解析表达式:2,,|,|,,()(x y x y x u y v x y x y I I E w I I w u v o X Y ∂∂=-=++∂∂∑∑ (1.1)其中,,x y E 为窗口内的灰度变化度量;,x y w 为窗口函数,一般定义为222()/,x y x y w eσ+=;I 为图像灰度函数,略去无穷小项有: 222222,,[()()2]2x y x y x y x y E w u I v I uvI I Au Cuv Bv =++=++∑(1.2)将,x y E 化为二次型有: ,[]x y u E u v M v ⎡⎤=⎢⎥⎣⎦(1.3)M 为实对称矩阵: 2,2x y x x y x y y I I I M w I I I ∙⎤⎡=⎥⎢∙⎢⎥⎣⎦∑ (1.4)通过对角化处理得到: 11,200x y E R R λλ-⎛⎫= ⎪⎝⎭ (1.5)其中,R 为旋转因子,对角化处理后并不改变以u,v 为坐标参数的空间曲面的形状,其特征值反应了两个主轴方向的图像表面曲率。
当两个特征值均较小时,表明目标点附近区域为“平坦区域”;特征值一大一小时,表明特征点位于“边缘”上;只有当两个特征值均比较大时,沿任何方向的移动均将导致灰度的剧烈变化。
Harris 的角点响应函数(CRF)表达式由此而得到:2(,)det()(())CRF x y M k trace M =- (1.6) 其中:det(M)表示矩阵M 的行列式,trace(M)表示矩阵的迹。
当目标像素点的CRF 值大于给定的阈值时,该像素点即为角点。
SUSAN算法与虚拟圆技术在图像配准中的应用
■■ 技 术 与■ ■亿
S S N算 法 与 虚 拟 圆技 术在 图像 配 准 中的 应 用 UA
T e Ap lc to fS AN g rt m n ru lCice n I g g sr t n h p ia in o US Alo ih a d Vit a r l s i ma e Re itai o
王 召斌 段 会 川
ⅣG Zh o—b n DU N Hu —c u n a i A ha
图像 配 准是 数 字 图像 处理 中 的一 个 重 要 研 究 方 向 。 在 本 文 中把 S S N 算 法 和 虚 拟 圆 技 术 结 合 起 来 。 UA 提 出了一 种 新 的 图像 配 准 方 法 。 经 过 S s N算 法处 理 并 二 值 化 后 的 图 像 去 除 了原 图像 中的 大部 分 信 息 , UA 只保 留 了明 显 的边 缘 信 息 . 样 就 大 大提 高 了虚 拟 圆 的提 取 速 度 。试 验 表 明 这 种 新 的 配 准 方 法 具 有 简 这
和模式识别领域 中的一个重要研究 方向 。简单地说 , 图像配准就
是将 同一场景 的不 同的图像 “ 对齐” 或进行广义 的匹配 , 以消除存 在 的几何 畸变 。图像 的配 准技术 在计 算机视 觉 、 模式 识别 、 工业
认为该点与核具有相 同( 或相 近 ) 的灰度 。满足这样 条件 的像素
的配准技术可以分为两大类 : 于灰度 的图像配 准和基 于特 征的 基 图像配准 。前者用图像的灰度值进行配 准 , 者使用 图像 的特征 后
4
9 1 0
5
l 1
6
1 2
ቤተ መጻሕፍቲ ባይዱ
7
改进的SUSAN角点检测算法
改进的SUSAN角点检测算法作者:张映权,王琼华,李大海,张文涛来源:《现代电子技术》2009年第20期摘要:SUSAN角点检测算法以抗噪声性能强,运算速度快而被广泛运用于特征点的提取。
传统的SUSAN算法的灰度差阈值固定,不能有效去除伪角点,并且在大尺寸模板检测下耗时多。
针对这些问题,从模板尺寸对检测结果的影响出发,讨论不同尺寸模板的检测效果,从而提出一种变换模板提取特征点的方法。
采用一种自动选取阈值的方法实现了阈值的自动选取,使用能量分布法和像素投影法去除了伪角点。
结果显示,该方法缩短了检测时间,并且提高了检测准确度。
关键词:特征提取;SUSAN算法;能量分布;像素投影中图分类号:TP391文献标识码:A文章编号:1004-373X(2009)20-042-03Improved SUSAN Corner Detection AlgorithmZHANG Yingquan,WANG Qionghua,LI Dahai,ZHANG Wentao(School of Electronics and Information Engineering,Key Laboratory of Fundamental Synthetic Vision Graphics and Imagefor National Defense,Sichuan University,Chengdu,610065,China)Abstract:SUSAN corner detection algorithm is widely used in feature extraction for its good performance in noise resistance and fast calculation.The traditional SUSAN algorithm has a fixed brightness difference threshold and can′t eliminate the fake corner well.The traditional algorithm is time-consuming when large-size mask is used.Aiming at those problems,the relationship between mask size and detection results is discussed,and an algorithm using alternate mask is proposed.A method that can select the threshold automatically is adopted.The energy distribution and pixel projection methods are used to eliminate the fake corners.The experimental results show that this improved algorithm reduces the detection time and improves the detection accuracy.Keywords:feature extraction;SUSAN algorithm;energy distribution;pixel projection0 引言在计算机视觉和图像处理中角点还没有明确的数学定义,存在多种数学描述方法。
基于环形模板的SUSAN角点检测算法
文章编号 : l O O 9— 2 5 5 2 ( 2 0 1 4 ) O 1 — 0 0 3 1 — 0 4 中图分类号 : T P 3 9 1 . 4 1 文献标 识码 : A
基 于环 形模 板 的 S U S A N角点 检 测 算 法
唐坚 刚 ,任 琳2 ,林 新 ,李 春
e d g e p o i n t ,i n c a s e o f mi s s i n g c o me r ,t he n a d d i n g a d i s c r e t e r in g- t e mpl a t e r t o S US AN ’S c i r c l e t e mp l a t e,a n d a c c o di r n g t o t h e b ig r h t n e s s c h a n g e t i me s o f r t o di s t i n g u i s h t h e p o i n t i s c o me r o r n o t .Th e
( 1 .上海 医疗器械高等专科学 校 ,上海 2 0 0 0 9 3 ;2 .上海理工大学 ,上海 2 0 0 0 9 3 )
摘
要 :S U S A N算子 需要 不断地调 整 “ 相似 性 阈值 ” 才能获得 更好 的 角点 ,它 可 以检 测 X型 、Y
型和 T型 ,但 是 不能检 测 出特 殊 形状 和 复 杂形 状 的 角 点 。为 了克 服 这 些缺 点 ,文 中提 出 了一种 自适 应 阈值 的选择 方 法 ,使程 序 自动化 ,若 角点 的 U S A N 区域 与边缘 点的 U S A N 区域 相 同,则在 S U S A N 的模 板 中叠加 一个 离散 的环 状模 板 r ,根据模 板 r中的 亮度 变化 次数 来 区分待 测 点是 否是 角点 ,以免 遗 漏角点 。 实验 结果显 示改进 后 的 算 法不 仅 省 去手 动 调 整 阈值 , 大大提 高程 序运 行
susan边缘检测算法

susan边缘检测算法Susan边缘检测算法是一种常用的图像处理算法,它可以有效地检测出图像中的边缘信息。
本文将介绍Susan边缘检测算法的原理和应用,并分析其优缺点。
一、Susan边缘检测算法原理Susan边缘检测算法是由Smith和Brady于1997年提出的,它通过对图像中每个像素点的邻域进行比较,来确定该像素点是否为边缘点。
Susan算法以一个邻域模板为基础,模板的大小可以根据具体应用而定。
对于模板中的每个像素点,算法将计算其与邻域内其他像素点的差异程度,并根据差异的大小来判断该像素点是否为边缘点。
具体而言,Susan算法首先计算邻域内所有像素点与中心点的灰度差值,并将差值小于某个阈值的像素点标记为邻域点。
然后,算法根据邻域点的数量来判断中心点是否为边缘点。
如果邻域点的数量超过某个预设的阈值,那么中心点被认为是非边缘点;反之,如果邻域点的数量小于阈值,中心点被认为是边缘点。
二、Susan边缘检测算法应用Susan边缘检测算法在图像处理领域有广泛的应用。
它可以用于图像分割、目标识别、图像增强等方面。
1. 图像分割:Susan边缘检测算法可以将图像分割成不同的区域,从而实现对图像的分析和处理。
通过检测图像中的边缘信息,可以将图像中不同的物体或区域分离开来,为后续的图像处理提供基础。
2. 目标识别:Susan边缘检测算法可以帮助识别图像中的目标物体。
通过检测图像中物体的边缘信息,可以提取出物体的轮廓,从而实现对目标物体的识别和定位。
3. 图像增强:Susan边缘检测算法可以用于图像增强,提高图像的质量和清晰度。
通过检测图像中的边缘信息,可以增强图像的纹理和细节,使图像更加清晰和鲜明。
三、Susan边缘检测算法优缺点分析1. 优点:(1)Susan算法对噪声具有一定的鲁棒性,能够有效地抑制噪声对边缘检测的影响。
(2)Susan算法可以同时检测出边缘的内部和外部,不仅可以提取出边缘的轮廓,还可以获取边缘的纹理和细节信息。
基于曲波变换和Susan种子点生长的边缘检测算法
l
2
3
对 于每 个 J≥ J , 义在 频域 上 的窗 口 U , 。定 ,
4 9 l 6 2 3 l O l7 24 30
5 ll l 8 25 31 35
逼 近性 能上 要 优 于 三 角 基 ,但 是 小 波 变换 并 不 能
充 分 利 用 图 像 本 身 特 有 的 几 何 特 征 ,并 不 是 最 优 的 和 “ 稀 疏 ” 函 数 表 示 方 法 ,不 能 达 到 理 想 的 最 的 最 优逼 近 阶[. 5 j C n h 等 _ 提 出 了 一 种 适 合 分 析 具 有 曲 线 或 a ds 6
区 最 大 , 模 板 d 和 e所 示 ; 边 缘 处 US 如 在 AN 区
大 小 降 为 一 半 , 模 板 a所 示 ;而 在 角 点 附 近 如
US AN 区 变 得 更 小 , 模 板 c所 示 .由 此 可 根 据 如
US AN 区的大小 和矩 阵特 性 来 检 测 图像 边 缘及 角 点 等特 征 的位置 及方 向.
边缘 检测 算 法在 单 一 尺 度 上进 行 边 缘 检 测 时 不 可 能精 确地 检 测到 不 同尺度 空 间 中的所有 边缘 . 用 利
小 波 的 多 尺 度 特 性 , 低 分 辨 率 下 抑 制 噪 声 和 细 在 节 , 速 可靠 地识 别 边缘 ; 高 分辨 率下 精确 定位 , 快 在
文 章 编 号 :1 0 1 0 2 1 ) 30 8 5 0 0 l ( 0 1 0 — 3 60 9
基 于 曲波 变 换 和 S sn种 子 点生 长 的 边缘 检 测 算法 ua
基于改进SUSAN原则的小目标检测算法
mal z 正 @ c l e u c i : h ¨g ut d . n .
很微弱 , 极易淹没在强噪声背景 中, 使得弱小 目标的
维普资讯
第3 6卷 第 6期
20 0 6年 6月
激 光 与 红 外
I S R & I F A E N RARE D
Vo. 6。 . 1 3 No 6
J n ,0 6 u e20
文 章 编 号 :0 1 0 8 2 0 )60 0 - 10 - 7 (0 6 0 -5 40 5 4
能力 。
关键词 :U A S S N原则; 目 小 标检测 ; 自适应检测
中图分 类号 : P 5 T71 文献 标识 码 : A
Dee to g rt m fS l Ta g tBa e n I r v d S AN icp e tci n Al o i h o mal r e s d o mp o e US Prn il
1 引 言
的边缘和角点 , 而对 噪声不敏感 , 变成 只检测小 目
标, 而对噪声和 角点都不 敏感 的方法 , 从而使 S — U S N原则应用到红外小 目 的检测中 , A 标 取得 良好 的
检 测效 率 。
在红外预警系统中 , 为了尽早发现 目 , 标 使武器 系统有足够的反应时间, 要求在很远 的距离上探测 到 目 , 标和探测系统的相对位置越远 , 标对探 标 目 目 测 系统所成的张角越小 , 在探测器上 的成像面积越 小( 只有几个像素 的大小 ) , … 另一方面成像 系统内
一种改进的快速SUSAN角点检测算法
I p o e g rt m s d o US m r v d Al o ih Ba e n S AN r e t c in Co n r De e to
LI P n — u , i g ln , ih N e g y e LIL n —i g LICu - ua
p o e s n k s e ce c r v d r c s ,a d ma e f in y i o e . i mp
Ke r s: US lo tm ;c r e e e t n; atS S N l o t m y wo d S AN ag r i h o n rd tc i o f s U A ag r i h
o n sa e ma e c od n o t r e n p e e t i t r ce h n.an n ma i ls p r si n f n t n i s d t h o e p it r r k d a c r i gt ec tro r s n e e a t l.T e h i i d nh i o — x ma u pe so ci u e c o s u o s o
21 00年第 2期
文 章 编 号 :062 7 (0 0 0 - 6 - 10 -45 2 1 ) 20 60 0 3
计 算 机 与 现 代 化 JS A J U X A D I A IU N IY I N A HU
总第 14期 7
一
种 改进 的快速 S S N角 点 检测 算 法 UA
提 高。 关 键 词 :U A S S N算 法 ;角点 检 测 ; 速 S S N 算 法 快 A
中图分类号: P9 .l T 3 14
SUSAN算子的实现
S ������0 , ������0 = S ������0 , ������0 即为核同值区域面积。 (3) 阈值化得到初步的边缘响应 R ������0 , ������0 =
������ − S ������0 , ������0 S ������0 , ������0 < ������ 0 ������������������������
G 取 USAN 最大值的 1/2. USAN 值越小,角点的响应就越强。
四、 实验代码
BOOL CBmpProcessView::SUSAN(LPSTR lpDIBBits, LONG lWidth, LONG lHeight) { // 指向源图像的指针 LPSTR lpSrc;
// 指向缓存图像的指针 LPSTR lpDst; // 指向缓存 DIB 图像的指针 LPSTR lpNewDIBBits; HLOCAL hNewDIBBits; //循环变量 longi; long j; unsigned char pixel[37]; // 暂时分配内存,以保存新图像 hNewDIBBits = LocalAlloc(LHND, lWidth * lHeight); if (hNewDIBBits == NULL) { // 分配内存失败 return FALSE; } // 锁定内存 lpNewDIBBits = (char * )LocalLock(hNewDIBBits); // 初始化新分配的内存,设定初始值为 255 lpDst = (char *)lpNewDIBBits; memset(lpDst, (BYTE)255, lWidth * lHeight); PPointm_point; g_point.clear(); //使用水平方向的结构元素进行腐蚀 for(j = lHeight-4; j >2; j--) { for(i = 3;i <lWidth-3; i++) { //由于使用 7×7 的模板,为防止越界,所以不处理最下边和最右边的两 列像素 // 指向源图像第 j 行,第 i 个象素的指针 lpSrc = (char *)lpDIBBits + lWidth * j + i; // 指向目标图像第 j 行,第 i 个象素的指针 lpDst = (char *)lpNewDIBBits + lWidth * j + i;
基于改进SUSAN原则的小目标边缘检测算法

口的模板。 该模板包含 样可以获得较好效果
O ii cin l u i cl tutr Ee n o mnd et a r o M l- ae r c e l t S S u me t f Po e d g fh E t n t n l o  ̄rn e nA tm t na d o i i nn rc e i s teI E I e ai a C n e c uo a i n gs c J a t n o E nr o o o L t sl
了 种 S SN( m ls U i l em n A s it gN c u ) L A S a e n a e g et s m l i ul s 算 lt v u S i an e 法 SSN算法是一种基于图像灰度的算法,只基于对周边像素的 UA 灰度比较,完全不涉及梯度的运算,因此其抗噪声能力很强。 对叶片罔缘l的害虫进行边缘检测 ,当 f l 监测对象为蚜虫、瞒类 等微小昆 虫时,图像的边缘检测 目 标变的很微小, 使用传统的边缘 检测方法进行边缘检测,无法区分小目标和背景,而且抗噪能力很 差, 无法实现对害虫数量的统计。 为此, 提出了 一种基于改进 SSN UA 原 则的小 目标检测方法 。该方法对最小吸收 同值核区 (m ls S ae lt U i l g t i f g ul , n a e e me s m ii c u 简称 S S N) vuS nA s l n N e a s U A 原则进行了 重新定义, 使之原米j能检测目 { 标的边缘和角点, 而对噪声不敏感, 变成只榆测小目 而对噪声和角点都不敏感的方法, 标, 从而使 S ̄N L . 原则应用到叶片害虫等小目 标的检测中,取得良好的检测效率。
SUSAN算法
SUSAN 算法原理边缘检测的SUSAN 算法:该算法用一个预定义的掩板对图像中的每个象素点进行局部的运算操作,给出相应的边缘响应。
这个响应就作为输出得到图像的边缘。
实现模板有两种:(1) 圆形掩板,能覆盖37个象素点,半径是3.4个象素; (2) 3*3的方形掩板。
首先把掩板置于每个象素点上,并对掩板所覆盖的象素点依次与掩板中心所对应的象素点(称为核)进行比较,比较方法如下所示:其中,0r是核的象素点,r 是掩板中其他的象素点,()I r 是r点的亮度值,t 是亮度差的阈值(决定了特征最小对比度和最大可忽视的噪声值),c 是比较结果。
对掩板下的每个象素点进行如上运算后,总的n 计算如下:这个n 是USAN 的象素数目,即USAN 区域。
然后,n 与预先取定的几何中心g 比较,这个g 取为m ax 34n ,其中m ax n 是n 可以取得的最大值。
这样,初始边缘响应0()R r可用如下规则得到:从上式中可以看出,USAN 区域越小,边缘响应就越大。
当没有噪声的时候,几何阈值g 可以取为m ax n 。
为了最有效地抑制噪声,通过计算噪声响应的期望值,最终确定g 的值取为m ax 34n 。
该算法得出了很理想的结果,在实际测试中,我们用(4)式代替(1)式来计算c ,得到的结果更稳定,更准确。
由于在图像边缘地方,掩板的中心0r 和对应的USAN 区域质心r是不同点,所以根据这个特点,可以计算边缘的一些信息。
USAN 区域的质心r按(5)式计算:用00(,)x y 和(,)x y 分别表示掩板中心0r 和USAN 区域质心r的坐标位置,则有这样就可以计算出边缘的方向200200()()()()y y r d x x r -=-而00()()y y x x --的符号决定了对角线边缘的梯度的正负。
总的来说,SUSAN 边缘检测算法可归纳为依次对每个图像象素点做如下五个操作步骤:1. 把圆形掩板(或者3*3模板)的中心点对准该图像象素点。
SUSAN边缘检测算法性能分析与比较
SUSAN边缘检测算法性能分析与比较马桂珍;房宗良;姚宗中【摘要】介绍了一种基于灰度比较的边缘检测算法--SUSAN算法,讨论了该算法的模板和门限的选取方法,并用VC++编程实现了该算法.通过与传统边缘检测算法的比较,结果表明:由于该算法不涉及梯度的运算,因此对噪声图像的边缘检测效果优于传统的边缘检测算法.该算法适于含噪图像或低对比度灰度图像的边缘检测.【期刊名称】《现代电子技术》【年(卷),期】2007(030)008【总页数】3页(P189-191)【关键词】图像;边缘检测;算法;SUSAN【作者】马桂珍;房宗良;姚宗中【作者单位】防化指挥工程学院,北京,102205;防化指挥工程学院,北京,102205;防化指挥工程学院,北京,102205【正文语种】中文【中图分类】TP3111 引言边缘是图像最基本的特征,是图像分割的第一步。
经典的边缘检测方法如:Roberts,Sobel,Prewitt,Kirsch,Laplace等方法,基本都是对原始图像中象素的小邻域构造边缘检测算子,进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最后选取适当的阀值提取边界。
由于这些算法涉及梯度的运算,因此均存在对噪声敏感、计算量大等缺点。
在实践中,发现SUSAN算法只基于对周边象素的灰度比较,完全不涉及梯度的运算,因此其抗噪声能力很强,运算量也比较小。
并将SUSAN算法用于多类图像的边缘检测中,实验证明该算法非常适合含噪图像的边缘检测。
2 SUSAN边缘检测简介2.1 SUSAN特征检测原理如图1所示,用一个圆形模板在图像上移动,若模板内象素的灰度与模板中心象素(称为:核Nucleus)灰度的差值小于一定阀值,则认为该点与核具有相同(或相近)的灰度,由满足这样条件的象素组成的区域称为USAN(Univalue Segment Assimilating Nucleus)。
当圆形模板完全处在图像或背景中时,USAN区域面积最大(如图1中的a和b);当模板移向图像边缘时,USAN区域逐渐变小(如图1中c);当模板中心处于边缘时,USAN区域很小(如图1中的d) ;当模板中心处于角点时,USAN区域最小(如图1中的e)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SUSAN检测算法
检测算法概述
概述
概述
SUSAN算法是1997年英国牛津大学的Smith等人提出的一种处理灰度图像的方法。
探测算子的基本原理是:与每一图像点相关的局部区域具有相同的亮度。
下面介绍SUSAN角点检测准则。
1SUSAN算子
将位于圆形窗口模板中心等待检测的象素点称为核心点。
假设图像中无纹理存在,称与核心点具有一样的灰度值的区域为USAN(Univalue Segment Assimilting Nucleus)。
图(1)给出了USAN的三种典型形状:
图(1)
由图(1)可以清楚的看到,当核心点位于USAN区域内时,USAN区域面积最大;当核心点位于边 缘时,USAN区域相当于整个领域面积的一半;当核心点的USAN区域最小时,核心点是角点。
利用这个原理,Smith等人提出了最小核心值相似区域 (SUSAN,Smallest Univalue Segment Assimilating Nucleus )的角点检测算法。
SUSAN算子使用的是圆形模板进行角点检测,一般使用的模板的半径为3~4个像素,如图(2)所示。
图(2) SUSAN圆形模板
将模板中的各点亮度与核心点的亮度利用下面的函数进行比较,
(1)
在上式中 为图像中像素 的灰度值, t为灰度差别的阈值, 为模板中心的像素, 为其他的像素, C为比较函数。
模板中所有的像素都用这个函数进行比较,然后 计算 出函数C的和值n。
(2)
和值n就是USAN(univalue segment assimilating nucleus)区域的像素个数,就是USAN区域的面积,然后把这个面积和几何阈值进行比较,得到最后的响应函数:
(3)
上式中,R为响应函数,g为阈值,通常在探测角点时取值为1/2模板的像素个数,当采用7×7的模板时,g=37×1/2。
2SUSAN算子的改进算法
通常在实际的 应用 中,对于比较函数 我们通常采用下面的比较函数:
(4)
采用这个函数可以使比较函数具有更好的稳定性,当图像中的像素亮度值有很小的变化后,对于c 的取值不会产生很大的 影响 。
灰度差别阈值t能够体现出算法检测到的角点的最小对比度,同时该值也是忽略噪声的最大值。
它的大小决定了在不同的对比度图像中提取特征值的多少,因此,对于不同的对比度和噪声的图像,取值t应该不同,从而达到最好的提取效果。
问题分析及改进
及改进
3、问题分析
及改进
SUSAN检测方法是对噪声和图像的旋转具有鲁棒性的优秀的检测方法之一,但是它无法检测所有应该检测出的角点。
在一些情况下也会产生错误的检测,漏检和误检等问题都限制其应用。
1)去除伪角点
方法1:计算USAN区域的重心,然后计算重心与模板中心的距离,如果距离较小则不是正确的角点。
方法2:计算USAN区域的重心,判断该重心与模板中心的连线所经过的像素点是否都属于USAN区域,如是,则该模板中心点就是角点。
这个方法加强了USAN区域的一致性,在有些图像中尤其是有噪声的情况下是非常必要的。
2)非极大值抑制
在角点所在的位置附近区域,响应函数可能都具有较高的值,而只有在局部有最大值的位置才是角点的正确位置,所以需要进行非极大值抑制。
4 4 编程实现流程编程实现流程编程实现流程
1)使用圆形模板遍历图像;
2)使用式(1)或(4)相似比较函数对模板中各点计算相似度;
3)设置一个阈值,其值小于边缘检测的值,这里取g=n Max /2,;利用式(3)产生角点响应;
4)去除伪角点;
5)非极大值抑制。
2014-1-9。