导航系统-区域导航概要
汽车导航系统的使用指南

汽车导航系统的使用指南随着科技的不断进步,汽车导航系统已经成为现代车辆中不可或缺的一部分。
它不仅能够为我们提供准确的导航信息,还能帮助我们规划最佳路线、避免拥堵和迷路。
然而,对于一些不熟悉导航系统的人来说,使用起来可能会有些困难。
在本文中,我们将为您提供一份汽车导航系统的使用指南,帮助您更好地利用这一便利工具。
首先,让我们了解一下汽车导航系统的基本功能。
一般来说,导航系统可以提供三种导航方式:地图导航、语音导航和实景导航。
地图导航是最常见的一种方式,它会在屏幕上显示地图,并标注出您的当前位置和目的地。
语音导航则通过语音提示告诉您应该往哪个方向前进,转弯等。
实景导航则结合了地图和语音,通过显示实景图像来引导您前进。
您可以根据自己的喜好选择适合自己的导航方式。
接下来,我们来了解一下如何设置导航目的地。
一般来说,导航系统提供两种设置目的地的方式:手动输入和语音输入。
手动输入是最常见的方式,您只需要在屏幕上输入目的地的地址或者名称即可。
而语音输入则更加方便,您只需要按下语音按钮,然后说出目的地的名称或者地址,系统会自动识别并导航。
无论您选择哪种方式,确保输入的地址准确无误,以免导航系统给出错误的路线。
在导航过程中,您可能会遇到一些交通状况,比如拥堵或者事故。
好在导航系统可以帮助您避开这些问题。
一般来说,导航系统会实时更新交通信息,并根据情况调整路线。
如果您遇到了拥堵,系统会提供替代路线供您选择。
此外,一些高级导航系统还可以提前预警您即将遇到的交通问题,帮助您及时规避。
除了基本功能外,现代汽车导航系统还提供了一些实用的附加功能。
比如,您可以在导航系统中搜索附近的加油站、餐厅、酒店等地点,并直接导航过去。
此外,一些导航系统还可以与您的手机或者智能手表等设备连接,实现更多的功能,比如接听电话、播放音乐等。
您可以根据自己的需求选择适合自己的导航系统。
最后,我们来谈谈如何正确使用导航系统。
首先,确保您在行车前设置好目的地,并熟悉导航系统的基本操作。
导航概述

测绘与国土信息工程系
地面无线电导航技术
无线电导航测角系统
振幅式导航系统:利用无线电波直线传播的特性 ,将运载体上的环形方向性天线转到使接收的信 号幅值为最小的位置,从而测出电台航向。
相位式导航系统:利用地面导航台发射迅速旋转 的方向图,根据运载体不同位置接收到的无线电 信号的不同相位来判定地面导航台相对飞机的方 位角。
利用等高度圆和等方位线确定位置
测绘与国土信息工程系
双星定位方法
只要用六分仪(一种光学仪器) 测得某恒星的高度角,再根据天 文年历及时钟查出该时刻恒星星 下点的位置,就能在地图上作出 一个等高圆。用同样的方法观测 另外一颗恒星可得到第二个等高 圆。两个圆有两个交点,一个是 舰船的真实位置,另一个是虚假 位置。根据舰船在测量时刻以前 的航迹或借助第三个等高圆,就 可排除虚假位置,确定真实位置 。
陆标导航技术
(l) 一标方位距离法:根据测定的至一个岸标的距离和方位来 确定船位,如用雷达测距离,用方位分罗经测岸标方位。过岸标 的等方位线与以岸标为圆心的等距离线(圆)的交点就是船位, 见图(a)。 (2) 二标方位法:根据测定出的至两个岸标的方位确定船位。 过两个岸标的两条等方位线的交点即为船位,见图(b)。
测绘与国土信息工程系
地面无线电导航技术
台站识别方面:不同台站采用不同的频率、时间 和编码来相互区分。如:频分制应用于台卡和塔 康等导航系统;时分制应用于微波着陆系统;码 分制应用于卫星导航系统,奥米伽导航系统混合 应用时分-频分制,用多频进行巷识别,用时间 区分台站。
测绘与国土信息工程系
地面无线电导航技术
测绘与国土信息工程系
导航设备的工作状态
四大全球卫星导航系统简介教学提纲
四大全球卫星导航系统简介四大全球卫星导航系统简介目前有四大全球卫星导航系统,其中包括: 美国的全球卫星定位系统GPS、俄罗斯GLONASS卫星导航系统、中国的北斗卫星导航系统、欧洲“伽利略”卫星导航系统。
一、美国的全球卫星定位系统GPS1、简介:GPS 是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。
GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。
GPS系统由28颗地球同步卫星组成(4颗为备用星),均匀地分布在距离地球20000公里高空的6个轨道面上。
这些卫星与地面支撑系统组成网络,每隔1-3秒向全球用户播报一次其位置(经纬度)、速度、高度和时间信息,能使地球上任何地方的用户在任何时候都能利用GPS接收机同时收到至少4颗卫星的位置信息,应用差分定位原理计算确定自己的位置,精度约为10米。
2、特点:(1)全球、全天候工作。
(2)定位精度高。
单机定位精度优于10m,采用差分定位,精度可达厘米级和毫米级。
(3)功能多,应用广。
(4)高效率、操作简便、应用广泛。
二、俄罗斯GLONASS卫星导航系统1、简介:“格洛纳斯GLONASS”是俄语中“全球卫星导航系统GLOBAL NAVIGATION SATELLITE SYSTE”的缩写。
GLONASS的正式组网比GPS还早,这也是美国加快GPS建设的重要原因之一。
不过苏联的解体让格洛纳斯受到很大影响,正常运行卫星数量大减,甚至无法为为俄罗斯本土提供全面导航服务,更不要说和GPS竞争。
到了21世纪初随着俄罗斯经济的好转,格洛纳斯也开始恢复元气。
GLONASS的工作卫星有21颗,分布在3个轨道平面上,同时有三颗备份星。
这三个轨道平面两两相隔120度,同平面内的卫星之间相隔45度。
每颗卫星都在19100千米高、64.8度倾角的轨道上运行。
每颗卫星需要11小时15分钟完成一个轨道周期,精度约为10米。
卫星导航系统概述
L频段
S频段:授权 服务信号
北斗导航卫星的服务
服务方式 开放 授权 差分 短报文
服务区域 全球 区域 区域 区域
服务指标 定位精度 10m 更高性能 定位精度 1m 120 个汉字
卫星导航系统
北斗卫星导航系统 GPS 卫星定位系统 GLONASS 卫星导航系统 欧洲新一代卫星导航系统——GLAILEO
GPS卫星系统定位信号
频率为1575.42MHz的L1载波 频率为1227.60HMz的L2载波 它们的频率分别是基本频率10.23MHz的
154倍和120倍,它们的波长分别19.03cm 和24.42cm。
GPS卫星系统的服务
GPS提供标准定位服务(SPS) 精确定位服务(PPS)两种。
全球卫星导航系统概述
姓名:王军 学号:QS13024
全球卫星导航系统
北斗卫星导航系统
GPS 卫星定位系统 GLONASS 卫星导航系统 欧洲新一代卫星导航系统——GLAILEO
北斗卫星系统简介
北斗卫星导航系统﹝BeiDou(COMPASS) Navigation Satellite System﹞是中国正在实 施的自主发展、独立运行的全球卫星导航系 统。
被动式 50 16 低 2
Galileo 欧盟
30
3 i =56° 23616 L1F/L1P/E6C/ E6P/E5A/E5B
被动式 10 1 高 >=3
四大系统参数和性能比较
北斗卫星导航系统是中国自主建设、独立运行, 并与世界其他卫星导航系统兼容共用的全球卫 星导航系统,可在全球范围内全天候、全天时 为各类用户提供高精度高可靠的定位、导航、 授时服务,并兼短报文通信能力。
格洛纳斯系统使用频分多址(FDMA)的方式, 每颗格洛纳斯卫星广播两种信号,L1和L2 信号。具体地说,频率分别为 L1=1602+0.5625*k(MHz)和 L2=1246+0.4375*k(MHz),其中k为1~24 为每颗卫星的频率编号,同一颗卫星满足 L1/L2=9/7。
11.区域导航讲解

基本RNAV
❖航迹跟踪精度: RNP4
❖航道宽度: 10NM
❖对应的导航设 备:公布距离 小于100NM以 内的VOR/VOR 或VOR/DME台 网
精密RNAV
❖RNP1 ❖航道宽度:4NM ❖对应的导航设备:
GNSS、INS
❖ 区域导航航路
固定航路
❖在该区域内永久的区域导航航路,只能由具备区 域导航能力的飞机做RNAV运行。如L888航路, 三亚飞行责任区RNP10航路,京沪平行航路
§2 区域导航的基本工作原理
❖ 基本原理:
VOR/DME
飞行数据 存储单元
自动数据 输入单元
DME/DME
GNSS/INS
导航数据
TAS ห้องสมุดไป่ตู้LT
空中数据
导航计算机单元
选定和编排飞行计划 修改飞行计划 计算大圆航线期望航迹 在地理坐标上定位 导航计算,输出导航参数
MH
控制显示
单元
普通仪表
电子移动式 航图显示
导航方式:导航方法,同时涉及航路及空域结构 台基导航设备:VOR、DME、GNSS 机载自主导航设备:INS、IRS 任意希望的路径(定位方法):
❖ 航路点(waypoint,地理坐标) ❖ 航线坐标(飞机相对与计划飞行航线的位置)
区域导航与传统导航的对比分析
项目
传统导航
区域导航
航路结构 导航设施 机载设备 定位 导航计算
RNAV按照飞行计划转换到航线坐标,计 算出向前方航路点的已飞距离或待飞距 离及航迹偏离;所有计算在大圆航线上 计算
❖ 区域导航精度要求
RNP (Required Navigation Performance): 对于在规定的空域内运行所需要的导航性能 的描述。RNP类型根据航空器至少由95%的 时间内预计能达到的导航性能精度的数值来 确定。
区域导航(RNAV)和所需导航性能(RNP)介绍和区别

区域导航(RNAV)和所需导航性能(RNP)介绍和区别区域导航RNAV空中交通史上的首批航路是沿地面台点设计的,在作出向、背台飞行的区别和台点的频率、航路宽度、飞行高度的规定后,飞机按设计的航路飞行,管制员按该航路计划实施管制。
由于当时还没有机载计算组件,飞机按逐台导航方法飞行。
随着VOR/DME成功地运用于导航和机载计算设备,出现了RNAV概念并得以初步应用。
RNAV被确认为一种导航方法,即允许飞机在相关导航设施的信号覆盖范围内,或在机载自主导航设备能力限度内,或在两者配合下沿所需的航路飞行。
这也正是目前陆基航行系统条件下RNAV航路设计的特点。
虽然可依靠机载计算组件作用,在导航台的覆盖范围内设计一条比较短捷航路,但仍按地面是否有导航台来设计航路。
陆基系统的RNAV航路可缩短航线距离,但飞行航路仍受到地面导航台的限制。
卫星导航系统的应用,从根本上解决了由于地面建台困难而导致空域不能充分利用的问题。
星基系统以其实时、高精度等特性使飞机在飞行过程中能够连续准确地定位。
在空域允许情况下,依靠星基系统的多功能性,或与FMC的配合,飞机容易实现任意两点间的直线飞行,或者最大限度地选择一条便捷航路。
一般来说利用卫星导航,飞行航路不再受地面建台与否的限制,实现了真正意义上航路设计的任意性。
因而卫星导航技术的应用使RNAV充分体现了随机导航的思想。
发展区域导航是为了提供更多的侧向自由度,从而有更多的能完全使用的可用空域。
该导航方式允许航空器不飞经某些导航设施,它有以下三种基本应用:1.在任何给定的起降点之间自主选择航线,以减少飞行距离、提高空间利用率;2.航空器可在终端区范围内的各种期望的起降航径上飞行,以加速空中交通流量;3.在某些机场允许航空器进行RNAV进近(如GPS进近落地),而无需那些机场的ILS。
区域导航介绍ppt课件

8 RNAV运行培训, 2006年11月
现代飞机实际使用的RNAV 飞行方法
依靠飞行管理系统(FMS) – 飞行路线和飞行程序储存在导航数据 库中; – FMS自动识别下一个有效航路点 ; – 选择最合适的导航源进行定位 ; – 向自动驾驶仪提供飞向下一个航路点 的信息,也可以提供飞行指引仪信息。
REQUIRED ACCUR ESTIMATED
2.1NM HIGH 0.16NM
GPS PRIMARY
15
• 使用RNP 0.3的技术 • LNAV 航迹 • VNAV剖面 • RF-TF 航段 • 复飞考虑一发失效 的超障能力
RNAV/RNP Rwy 26
(参照FAA AC 120-29a)
RNP 0.3 nm
16 RNAV运行培训, 2006年11月
实施背景
航空运输交通量发展迅速,空域容量需 要增加
边远地区的导航设施缺乏 一些机场地形复杂 越来越多的飞机具有RNAV能力
17 RNAV运行培训, 2006年11月
实施RNAV的可行性
具备RNP/RNAV的航空器
100% 90% 80% 70% 60% 50% 40% 30% 20% 10% 0%
区域导航飞行程序介绍
厦门航空有限公司
1 RNAV运行培训, 2006年11月
内容
1.一般介绍 基本概念 背景和运行优点 国内外的发展情况 飞行程序设计 数据库编码
2. 天津和北京的区域导航飞行程序
3. 实施规定
2 RNAV运行培训, 2006年11月
一般介绍
3 RNAV运行培训, 2006年11月
根据欧洲航行安全组织(EURCONTROL)的计划 时间表,到2010年,欧盟地区所有终端区的进 近程序都将强制性地使用RNAV/RNP。
导航系统简介

导航系统导航是指把飞机、导弹、宇宙飞行器、舰船等运动体从一个地方(如出发点)引导到目的地的过程。
导航系统的主要用途就是引导飞机沿着预定航线飞到预定地点,并能随时给出飞机准确的即时位置。
在军事上,导航系统还要配合其他系统完成武器投放、侦察、巡逻、反潜、预警和救援等任务。
早期的飞机主要依靠目视导航。
从20世纪20年代开始发展仪表导航,依靠磁罗盘、时钟、空速表和人工推算,确定飞机即时位置。
30年代出现了利用中波无线电台导航的无线电罗盘。
40年代开始研制甚高频伏尔(VOR)导航系统和仪表着陆系统(ILS)。
50年代惯性系统和多普勒雷达系统相继用于飞机导航。
作用距离达2000km的罗兰C无线导航系统于60年代初投入使用。
为满足军事上的需要,以后又相继研制出作用距离达10000km的奥米伽超远程导航系统和近程战术空中导航系统“塔康”(TACAN),70年代以后卫星导航系统问世,其中最著名的有美国的GPS和前苏联的GLONASS。
按照工作原理的不同,目前实际应用的飞机导航方法有下列几种:仪表导航、无线电导航、卫星导航、惯性导航、图像匹配导航、天文导航以及组合导航。
其中的仪表导航是利用飞机上的简单仪表(如空速表、磁罗盘、航向陀螺仪和时钟等)所提供的数据,通过人工计算或自动计算得出各种导航参数。
下面介绍除了仪表导航外的其他导航方式。
无线电导航系统无线电导航系统借助于无线电波的发射和接收,利用地面上设置的无线电导航台和飞机上的相应设备对飞机进行定位,测定飞机相对于导航台的方位、距离等参数,以确定飞行器的位置、速度、航迹等导航参数。
无线电导航很少受气候条件的限制,作用距离远、精度高、设备简单可靠,所以是飞机导航的主要技术手段之一。
尤其在夜间或复杂气象条件下,要保证飞行器的安全着陆,无线电导航设备更是必不可少的导航工具。
无线电导航系统按所测定的导航参数可分为:测向系统,如无线电罗盘和甚高频全向无线电信标(VOR)系统;测距系统,如无线电高度表和测距设备(DME);测距差系统,即双曲线无线电导航系统,如罗兰C和奥米伽导航系统;测角距系统,如战术空中导航(TACAN)和VOR/DME系统;测速系统,如多普勒雷达。
GPS全球卫星定位导航系统简介

GPS全球卫星定位导航系统GPS全球卫星定位导航系统(Global Positioning System-GPS)是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
经近10年我国测绘等部门的使用表明,GPS以全天候、高精度、自动化、高效益等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科,从而给测绘领域带来一场深刻的技术革命。
随着全球定位系统的不断改进,硬、软件的不断完善,应用领域正在不断地开拓,目前已遍及国民经济各种部门,并开始逐步深入人们的日常生活。
GPS系统的特点:1、全球,全天候工作:能为用户提供连续,实时的三维位置,三维速度和精密时间。
不受天气的影响。
2、定位精度高:单机定位精度优于10米,采用差分定位,精度可达厘米级和毫米级。
3、功能多,应用广:随着人们对GPS认识的加深,GPS不仅在测量,导航,测速,测时等方面得到更广泛的应用,而且其应用领域不断扩大。
GPS发展在卫星定位系统出现之前,远程导航与定位主要用无线导航系统。
1、无线电导航系统●罗兰--C:工作在100KHZ,由三个地面导航台组成,导航工作区域2000KM,一般精度200-300M。
● Omega(奥米茄):工作在十几千赫。
由八个地面导航台组成,可覆盖全球。
精度几英里。
●多卜勒系统:利用多卜勒频移原理,通过测量其频移得到运动物参数(地速和偏流角),推算出飞行器位置,属自备式航位推算系统。
误差随航程增加而累加。
缺点:覆盖的工作区域小;电波传播受大气影响;定位精度不高。
2、卫星定位系统最早的卫星定位系统是美国的子午仪系统(Transit),1958年研制,64年正式投入使用。
由于该系统卫星数目较小(5-6颗),运行高度较低(平均1000KM),从地面站观测到卫星的时间隔较长(平均1.5h),因而它无法提供连续的实时三维导航,而且精度较低。
汽车定位导航系统

共享出行
共享汽车、网约车等新兴出行方 式将借助汽车定位导航系统实现 高效路线规划和车辆调度。
对交通行业的影响与变革
01
提升交通安全
精确的定位和导航信息有助于减少交通事故的发生,提高道路安全水平。
02
缓解交通拥堵
智能化的导航和路线规划有助于优化交通流,缓解城市拥堵问题。
03
推动交通行业创新发展
汽车定位导航系统的技术进步将促使交通行业在出行方式、服务模式等
智能交通系统的应用能够提高道路通行效率,减少交通拥堵和事故风险,提升城市 交通运行的整体效能。
共享出行服务的应用
共享出行服务通过互联网平台整合闲置车辆资源,提 供出行服务给用户,如共享单车、共享汽车等。
汽车定位导航系统在共享出行服务中起到关键作用, 通过实时定位和导航功能,帮助用户找到可用车辆、
规划出行路线、实现智能停车等功能。
商务出行
对于商务出行,汽车定位导航 系统可以提供准确的定位和导 航服务,确保商务活动的顺利
进行。
汽车定位导航系统技
02
术
定位技术
全球定位系统(GPS)
混合定位
利用卫星信号来确定车辆的位置、速 度和时间。
结合GPS和惯性导航等多种技术,以 提高定位精度和可靠性。
惯性导航
通过陀螺仪和加速度计等传感器来测 量车辆的角速度和加速度,从而推算 出车辆的位置和姿态。
3
高精度地图
高精度地图的绘制与更新技术将进一步发展,提 升地图的准确性和实时性,为车辆提供更加准确 的导航指引。
应用领域拓展
自动驾驶
汽车定位导航系统将成为自动驾 驶技术的关键组成部分,为无人 驾驶车辆提供精确的位置信息和 导航服务。
全球卫星导航系统概述
全球卫星导航系统概述介绍:全球导航卫星系统(GNSS),也称为全球导航卫星系统,是一种空间无线电导航和定位系统,为用户提供地球上任何位置或近地空间的全天候3D坐标,速度和时间信息。
它是一个虚拟概念,通常代表在太空轨道上运行的所有卫星导航系统的总称,并且没有统一的规划标准。
全球卫星导航系统目前包括GPS全球卫星导航,北斗卫星导航,GLONASS卫星导航和伽利略卫星导航系统以及其他导航系统。
其中,美国GPS系统(Global Positioning System)是全世界最早部署实施的卫星导航系统,也是目前世界领先的卫星导航系统。
现在,日本的QZSS准天顶卫星系统,印度的IRNSS区域导航卫星系统和其他区域导航系统也已经开始建立。
北斗卫星导航系统和GLONASS现在在亚洲开放民用的使用权,尤其是北斗卫星系统,在民用领域的应用发展速度越发加快。
卫星导航系统广泛用于航空,导航,通信,人员跟踪,消费娱乐,测绘,定时,车辆监控和管理,车辆导航和信息服务。
其发展趋势是为用户的实时应用提供高精度的服务。
卫星导航定位已成为衡量综合国力和世界科技发展水平的重要指标之一。
借助卫星导航技术,人类可以进一步了解和改造世界。
只有大力发展北斗卫星导航系统,才可以完成中国大国崛起的目的,确保实现中华民族的伟大复兴。
GPS导航系统:GPS导航系统是美国陆军,海军和空军在20世纪70年代联合开发的卫星导航系统。
经过20多年的研究和实验,花费了300亿美元。
早在1994年3月就已经基本形成了以24颗GPS卫星,全球覆盖率达98%的标准。
该空间由18颗卫星和3颗主动备用卫星组成,均匀分布在距离地面20200km的6个轨道平面上。
它可以在世界任何地方实现,可以随时同时观察4颗以上的卫星。
其地面控制系统由监测站,主站和地面天线组成。
主控制站位于美国科罗拉多州的斯普林菲尔德。
它收集卫星传输信息并计算卫星日历,相对距离和大气校正数据。
用户设备包括捕获和跟踪卫星的操作,测量伪距的变化率和接收天线与卫星的距离。
卫星导航系统概述
GPS系统产生
进入二十世纪以后,随着科学技术水平的不 断提高人类逐渐发明/发现了许多新的定位 方法:
– 惯性导航技术(Inertial Navigation) – 地基电子导航系统(Ground-based Radionavigation System)(其中最著名的有 Loran C/D、Omega、VOR/DME Tacan等) – 空基电子导航系统(Space-based Radionavigation System)
俄罗斯(前苏联)
系统构成
卫星星座 地面控制部分 用户设备
GLONASS satellite
• GLONASS与GPS的比较
卫星导航定位系统——GLONASS
卫星运行状况
– 从1982年10月12日发射第一颗GLONASS卫星起, 至1995年12月14日共发射了73颗卫星。 – 由于卫星寿命过短,加之俄罗斯前一段时间经 济状况欠佳,无法及时补充新卫星,故该系统 不能维持正常工作。 – 到目前为止(2006年3月20日),GLONASS系统 共有17颗卫星在轨。其中有11颗卫星处于工作 状态,2颗备用,4颗已过期而停止使用。俄罗 斯计划到2007年使GLONASS系统的工作卫星数 量至少达到18颗,开始发挥导航定位功能
卫星导航定位系统——Galileo
伽俐略(Galileo)卫星导航定位系统
2002年3月24日欧盟决定研制组建自己的民用 卫星导航定位系统—— Galileo系统。 Galileo卫星星座将由27颗工作卫星和3颗备用卫 星组成,这30颗卫星将均匀分布在3个轨道平面 上,卫星高度为23616km,轨道倾角为56°。 Galileo系统是一种多功能的卫星导航定位系统, 具有公开服务、安全服务、商业服务和政府服 务等功能,但只有前两种服务是自由公开的, 后两种服务则需经过批准后才能使用。
导航系统清单
导航系统清单1. 导航系统是什么?导航系统是一种用于指导和帮助人们在未知区域或陌生环境中确定位置、规划路线并到达目的地的工具。
它可以通过使用地图、卫星导航、定位技术等各种方式来提供有效的导航服务。
2. 导航系统的重要性导航系统在现代社会中扮演着重要的角色。
它们被广泛使用于各种领域,包括个人导航、汽车导航、航空导航、海洋导航等。
导航系统帮助人们更加便捷地找到目的地,并缩短了旅行时间。
此外,导航系统还可以提供实时的交通信息、路况状况等,帮助人们避开拥堵区域,提高出行效率。
3. 导航系统的组成部分一个完整的导航系统通常由以下几个组成部分构成:3.1 地图数据地图数据是导航系统的基础。
它包括道路信息、建筑物、地标等,通常以数字化形式储存在导航系统的存储介质中。
地图数据的准确性和及时性对于导航系统的功能至关重要。
3.2 定位技术导航系统需要通过定位技术来确定用户的当前位置。
常用的定位技术包括全球卫星定位系统(GPS)、惯性导航系统(INS)等。
这些技术可以通过接收卫星信号或者使用传感器来获取用户的位置信息。
3.3 路径规划算法路径规划算法是导航系统中的关键部分。
它能够根据起点和终点之间的距离、道路条件、交通状况等因素,找到最优的路线。
常见的路径规划算法包括最短路径算法、最快路径算法等。
3.4 语音提示和显示界面导航系统通过语音提示和显示界面向用户提供导航信息。
语音提示可以帮助司机和行人更加方便地接受指导,显示界面则可以提供更加直观明了的导航信息。
4. 导航系统的发展趋势随着科技的不断进步,导航系统也在不断发展创新。
以下是导航系统的一些发展趋势:4.1 个性化导航导航系统将趋向于提供个性化的导航服务,根据用户的喜好和需求,为其提供定制化的导航方案。
4.2 增强现实导航增强现实导航将结合虚拟现实技术,为用户提供更加直观的导航体验。
通过显示虚拟导航线、实时路况等信息,帮助用户更加准确地导航。
4.3 智能交通导航导航系统将与智能交通系统相结合,实现实时的交通信息共享和路况监测。
全球定位系统导航系统概述说明书

2IntroductionSystem OverviewThe navigation system receives signals from the global positioning system (GPS), a network of 24 satellites in orbit around the earth. By receiving signals from several of these satellites,the navigation system can determine the latitude, longitude, and elevation of your vehicle.In addition, a gyroscopic yaw sensor and a vehicle speed sensor in your vehicle keep track of the direction and speed of travel at all times.The navigation system applies this location, direction, and speedinformation to the maps and calculates a route to the destination you enter. As you drive to that destination, the system provides map and voice guidance.The navigation system is easy to use.The locations of many places ofbusiness and entertainment are already entered in the system. You can select any of them as a destination by pressing only one or two of the controls.There are several ways to enter adestination, such as by point of interest (POI), by address, by phone number,and by selecting it from the map. The at a later date. The system also allows you to store a home address to simplify returning home from your destination.As you drive, the navigation system provides visual and audio drivinginstructions so you do not have to take your eyes off the road. Theseinstructions are provided in advance of the actual driving maneuver so you have time to slow down and change lanes if necessary.Read this manual thoroughly so you are familiar with all of the navigationsystem’s features. Afterwards, keep this manual in the glove box of your vehicle so you can refer to it at any time.highly-sophisticated location system that uses satellites and a map database to show you whereyou are and to help guide you to adesired destination.This navigation system is alast 20 destinations are saved for reuseIntroductionImportant Safety Information The navigation system can distract your attention from the road if you focus on the screen or operate the system’s controls while driving.Enter as much information as possible into the system before you begin driving, or when the vehicle is stopped. Then, as you drive, listen to the audio instructions.While driving, do not look at the screen or operate the system controls for more than a second or so at a time, and only after deciding you can do so safely. Pull to the side of the road if you need more time to look at the screen or operate the controls.The navigation system is designed to provide route information to help you reach your destination. However, this route guidance may sometimes conflict with current road conditions such as street closures, road construction, detours, and out-of-date map data. Additionally, the system itself has certain limitations (see page 71). Therefore, you must verify the audio and visual route information provided by the system by carefully observing the roadway, signs and signals, etc. If you are unsure, proceed with caution. Always use your own good judgment,and obey traffic laws while driving.Map OverviewYour navigation system has two kinds of streets: verified and unverified. The differences between the two types of streets are contrasted in the following chart.“Unverified” Road3Introduction。
第15章导航系统知识讲解
由于飞机的速度和位置是由测得的加速度经过积分而得 到的,因此必须知道初始条件,如初始速度和位置。在静 基座(地面)情况下,初始速度为零,初始位置为当地的经、 纬度。
第十五章 导航系统
2.特点
第十五章 导航系统
一、惯性导航 1.基本工作原理
惯性导航系统利用惯性敏感元件(陀螺仪和加速度计) 通过测量飞机相对于惯性空间的线性加速度和角加速度,在 给定运动初始条件下,由计算机计算出飞机的经纬度位置、 航迹、航向、姿态、升降速度和地速等信息,并将这些信息 传送给飞行仪表系统、飞行管理系统和自动飞行系统。 而实现的远程自主式导航方法。
第十五章 导航系统
第十五章 导航系统
惯性基准组件IRU (2个)-导航计算; 方式选择组件MSU( 1个)-提供系统方式选择功能; 惯性系统显示组件ISDU(1个)-提供操作者与系统之间的联
系;
数模转换器DAA(2个)-将接收到的数字输入信号转换成模
拟信号输出。
第十五章 导航系统
(1)惯性基准组件-IRU
第十五章 导航系统
校准惯导: 1.IRS进入导航方式前先 输入飞机当前位置。 通常用FMC的MCDU输 入; 也可以用惯导组件的键 盘输入。 2.校准惯导 校准期间飞机必须保持静 止。 正常校准:10分钟 快速校准:30秒
A320
第十五章 导航系统
(3)惯性系统显示组件
惯性系统显示组件(ISDU)提供机组与IRU之间的联 系,主要用来做数据输入、系统状态通告、导航信息选 择显示。
第十五章 导航系统
第十五章 导航系统
显示选择:控制左、右显示窗上导航数据的显示: TK/GS——真航迹角/地速; PPOS——飞机当前位置的纬、经度; WIND——风速和真风向; HDG/STS——真航向/状态; TEST——提供测试信号给选择的IRU; BRT——调节显示窗的亮度。
导航系统-区域导航

5nm(95%的飞行时间) 航道中心线 5nm(95%的飞行时间)
2014年7月31日
导航系统
16
导航系统--区域导航 4.2
用于航路、终端区
RNAV类型 RNAV 2
95%飞行时间偏离航道中线距离小于±2nm GPS,DME/DME,DME/DME/IRU
美国RNAV type B,用于Q航路和T航路
不需要机载性能监视与告警
1nm(95%的飞行时间) 航道中心线 1nm(95%的飞行时间)
2014年7月31日
导航系统
18
10nm(95%的飞行时间) 航道中心线 10nm(95%的飞行时间)
2014年7月31日
导航系统
14
导航系统--区域导航 4.2
RNAV10的应用
RNAV类型
RNAV 10(RNP 10)
北太平洋和中东太平洋航路 欧洲-南美航路 秘鲁-智利航路 澳大利亚,亚洲,中东和欧洲连接航路 非洲-陆上航路
不需要机载性能监视与告警
2nm(95%的飞行时间) 航道中心线 2nm(95%的飞行时间)
2014年7月31日
导航系统
17
导航系统--区域导航 4.2
用于航路、终端区
RNAV类型 RNAV 1
95%飞行时间偏离航道中线距离小于±1nm GPS,DME/DME,DME/DME/IRU 欧洲PRNAV,美国RNAV type A。目前还没有基于陆上航路的 RNAV1应用
区域导航(Area Navigation)又称随机导航(Random Navigation) 传统导航方法是从一个导航台飞向另一个导航台,其定位方法是 定出飞机相对于导航台的位置。 新一代机载导航系统具备不依赖于逐台导航而在任意两个航路点 之间精确飞行的能力。到20世纪80年代初期,航空电子技术已 经发展到能够实现区域导航的程度。
第1章导航系统概述
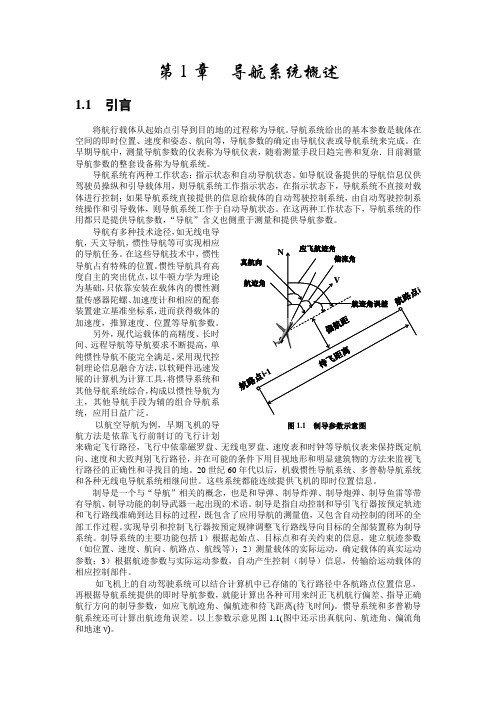
第1章 导航系统概述1.1 引言将航行载体从起始点引导到目的地的过程称为导航。
导航系统给出的基本参数是载体在空间的即时位置、速度和姿态、航向等,导航参数的确定由导航仪表或导航系统来完成。
在早期导航中,测量导航参数的仪表称为导航仪表,随着测量手段日趋完善和复杂.目前测量导航参数的整套设备称为导航系统。
导航系统有两种工作状态:指示状态和自动导航状态。
如导航设备提供的导航信息仅供驾驶员操纵和引导载体用,则导航系统工作指示状态,在指示状态下,导航系统不直接对载体进行控制;如果导航系统直接提供的信息给载体的自动驾驶控制系统,由自动驾驶控制系统操作和引导载体,则导航系统工作于自动导航状态。
在这两种工作状态下,导航系统的作用都只是提供导航参数,“导航”含义也侧重于测量和提供导航参数。
导航有多种技术途径,如无线电导航,天文导航,惯性导航等可实现相应的导航任务。
在这些导航技术中,惯性导航占有特殊的位置。
惯性导航具有高度自主的突出优点,以牛顿力学为理论为基础,只依靠安装在载体内的惯性测量传感器陀螺、加速度计和相应的配套装置建立基准坐标系,进而获得载体的加速度,推算速度、位置等导航参数。
另外,现代运载体的高精度、长时间、远程导航等导航要求不断提高,单纯惯性导航不能完全满足,采用现代控制理论信息融合方法,以软硬件迅速发展的计算机为计算工具,将惯导系统和其他导航系统综合,构成以惯性导航为主,其他导航手段为辅的组合导航系统,应用日益广泛。
以航空导航为例,早期飞机的导航方法是依靠飞行前制订的飞行计划来确定飞行路径,飞行中依靠磁罗盘、无线电罗盘、速度表和时钟等导航仪表来保持既定航向、速度和大致判别飞行路径,并在可能的条件下用目视地形和明显建筑物的方法来监视飞行路径的正确性和寻找目的地。
20世纪60年代以后,机载惯性导航系统、多普勒导航系统和各种无线电导航系统相继问世。
这些系统都能连续提供飞机的即时位置信息。
制导是一个与“导航”相关的概念,也是和导弹、制导炸弹、制导炮弹、制导鱼雷等带有导航、制导功能的制导武器一起出现的术语。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随机航路:非公布航路,在指定的随机RNAV区域内由飞行计划 自行确定的航路。
终端区航路:包括RNAV标准到达程序、RNAV进近程序、 RNAV标准离场程序、RNAV等待程序等。
2018年7月25日
导航系统
6
导航系统--区域导航
RNAV实现方法—VOR/DME
N
1
VOR/DME
2 2
1
GPS 接收机 (xu,yu,zu)
2018年7月25日
导航系统
9
导航系统--区域导航
RNAV实现方法—卫星导航
卫星2 (x2,y2,z2) 卫星3 (x3,y3,z3)
1 xu y1 yu z1 zu
2 2
双套或三套设备,提高精度,提 高可靠性 绝对法、地理坐标,并转换到航 线坐标大圆航线上计算
定位计算
2018年7月25日
导航系统
5
导航系统--区域导航
RNAV航路
固定航路:在该区域内公布的永久性的RNAV航路,包括某些航 路上由于缺乏信号源(陆基导航台)作航迹制导,只能由具备 RNAV能力的飞机作RNAV运行,还包括某些高空航路。 偶用航路:在该区域内公布的短期性的RNAV航路,只在遇到不 寻常的、发生于短期(时、日、季节)通知的临时需要所选用。
2
DME 2
3
(x2,y2,z2)
DME 3 (x3,y3,z3)
1
x1 xu
2
2
y1 yu z1 zu
2
2
2
x2 xu x3 xu
y2 yu z2 zu
2
2
(xu,yu,zu)
3
2
卫星1
2 d
(x1,y1,z1)
3d 4d
2 d
x2 xu y2 yu z2 zu
2 2
2
1 d
3 d
4 d
x3 xu y3 yu z3 zu
2018年7月25日
导航系统
2
导航系统--区域导航
RNAV定义
2018年7月25日
导航系统
3
导航系统--区域导航
区域导航概念
ICAO的“附件11”中对区域导航的定义是:区域导航 是一种导航方法,允许飞机在台基导航设备的基准台 覆盖范围内或在自主导航设备能力限度内,或两者配 合下按任何希望的飞行路径运行。
RNAV对机载系统的要求主要是对机载导航计算机的要求
应能在飞行前根据引进的航路点选定或编排飞行计划,还可以在 飞行中修改飞行计划。
计算大圆航线上的应飞航迹。
实现飞机在地理坐标上的定位。
连续实时在本航段(飞离航路点和前方航路点之间的大圆线段) 上实现航线坐标上的导航计算,输出主要导航参数(已飞或待飞 距离,侧向偏离)及其导出参数,如待飞时间或预计到达时间、 地速、航迹角、航迹误差、应飞航迹角等。
RNAV首先是一种导航方法
传统导航:算出飞机相对导航台位置实施导航 区域导航:算出飞机绝对位置实施导航
任何希望的飞行路线:在管制区域内可以自行任意定义航路 点,并以航路点的连续为航路。
2018年7月25日 导航系统 4
导航系统--区域导航
传统导航和区域导航的区别
项目
航路结构
传统导航
2018年7月25日
导航系统
12
导航系统--区域导航
RNAV类型
RNAV-10 RNAV-5 RNAV-2 RNAV-1
2018年7月25日
导航系统
13
导航系统--区域导航 RNAV 10(RNP 10)
用于海洋、边远地区 95%飞行时间偏离航道中线距离小于±10nm 不需要任何地面导航设施 两套远程导航系统(IRS/FMS、INS、GNSS) 不需要机载性能监视与告警
电台—电台构成逐台飞行,从 一个台飞向下一个台 NDB-ADF、VOR、DME 无线电导航接收机
区域导航
航路点—航路点构成逐点飞行, 也可跳过航路点飞行
VOR / DME、DME/DME、 INS、GNSS
依赖的导航设施
机载设备组成
导航传感器+RNAV计算机(包 括导航数据库)
机载设备配置
单套或双套设备,中等精度, 中等可靠性 相对法,相对于电台本地平面 上计算
区域导航(Area Navigation)又称随机导航(Random Navigation) 传统导航方法是从一个导航台飞向另一个导航台,其定位方法是 定出飞机相对于导航台的位置。 新一代机载导航系统具备不依赖于逐台导航而在任意两个航路点 之间精确飞行的能力。到20世纪80年代初期,航空电子技术已 经发展到能够实现区域导航的程度。
2 2
2
GPS 接收机 (xu,yu,zu)
x4 xu y4 yu z4 zu
2 2
2
(xu,yu,zu)
2018年7月25日
导航系统
10
导航系统--区域导航
RNAV实现方法—惯性导航
2018年7月25日
导航系统
11
导航系统--区域导航
RNAV对机载系统的要求
2018年7月25日
2
y3 yu z3 zu
2
2
导航系统
8
导航系统--区域导航
RNAV实现方法—卫星导航
卫星2 (x2,y2,z2) 卫星3 (x3,y3,z3)
卫星1
卫星4 (x4,y4,z4)
2 d
(x1,y1,z1)
3d 4d
1 d
N
N WPT
3
3
3 1 2 212 cos(2 1 )
3 2 arcsin
1 sin( 2 1 ) 3
7
2018年7月25日
导航系统
导航系统--区域导航
RNAV实现方法—DME/DME
(xu,yu,zu)
1
DME 1 (x1,y1,z1)
导航系统--区域导航
导航系统课程内容 传统导航
仪表导航 无线电导航
区域导航
简单区域导航(DME/DME、DME/VOR) 卫星导航 惯性导航
所需导航性能
RNP参数
基于性能的导航(PBN)
2018年7月25日 导航系统 1
导航系统--区域导航
区域导航概念
区域导航的概念