《结构力学习题集》-矩阵位移法习题及答案(DOC).
结构力学课后习题解答:9矩阵位移法习题解答.docx

第9章矩阵位移法习题解答习题9.1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
()(2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。
()(3)单元刚度矩阵都具有对称性和奇异性。
()(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
()(5)结构刚度矩阵与单元的编号方式有关。
()(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
()【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错误。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1)矩阵位移法分析包含三个基本环节,其一是结构的,其二是分析,其三是分析。
(2)已知某单元的定位向量为[3 5 6 7 8 9]七则单元刚度系数炫应叠加到结构刚度矩阵的元素中去。
(3)将非结点荷载转换为等效结点荷载,等效的原则是。
(4)矩阵位移法中,在求解结点位移之前,主要工作是形成矩阵和_________________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为4=[. V2 ft]T=[0.8 0.3 0.5]T,单元①的始、末端结点码为3、2,单元定位向量为尸>=[0 0 0 3 4 5]T ,设单元与x轴之间的夹角为a =买,则2 尹> =O(6 )用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为F e =[7.5 -48 -70.9 -7.5 48 -121.09]T ,则该单元的轴力心=kN。
【解】(1)离散化,单元,整体;(2)灯8;(3)结点位移相等;(4)结构刚度,综合结点荷载;(5)[0 0 0 0.3 -0.8 0.5]。
(6)-7.5o离、空的值以及K ⑴中元素妍、愚、姒的值。
【解】各刚度系数的物理意义如习题解9.3图所示。
结构力学(9.14.1)--矩阵位移法习题2
5kN m
8m 8m
8m
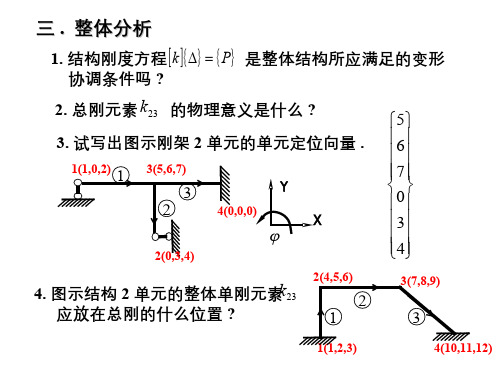
三 . 整体分析
12. 试求图示结构 ( 不计轴变 ) 的荷载列阵 ( 先处理法 ).
1(1,0,2) 2(1,0ቤተ መጻሕፍቲ ባይዱ3) 3(1,0,3)
X1
X2
4(0,0,0)
P
X
1
0
X
2
0
四 . 求杆端力
1. 连续梁在一般荷载作用下 , 单元杆端力由下式计算 . 是否正确 ?
6
48
4
2
1(0,0,0)
12
1 6
k
6
48
4(1,0,3)
3
2(0,0,0)
3
1
2
3
例 . 不计轴变 , 作弯矩图
已知 : 各杆长均为 12m, 线刚度均为 12
P 10kN, q 5kN / m
P 10kN, q 5kN / m
解 : 1 6 1 6
k
1
6
1
48 6
6 1
24
6
6
24
6
48
3(1,0,2)
2
1
1 6 1 6 1 0
k
1
6 1
48 6
6 1
24
2
0
63 1
6 24
EI
EI
EA 2l
2 2
l
l
三 . 整体分析
4(1,0,0)
5(1,0,0)
结构力学习题详解

第9章矩阵位移法典型题1. 用矩阵位移法计算图9.1a连续梁,并画M图,EI=常数。
图9.6解:(1)建立坐标系,对单元和结点编号如图9.6b,单元刚度矩阵单元定位向量λ①=(01)T,λ②=(12)T,λ③=(20)T(2)将各单元刚度矩阵中的元素按单元定位向量在K中对号入座,得整体刚度矩阵(3)连续梁的等效结点荷栽(4)将整体刚度矩阵K和等效结点荷载P代人基本方程(5)求杆端力并绘制弯矩图(图9.6c)。
2. 图9.2a结构,荷载只在(1),(3)杆上作用,已知(1),(3)杆在局部坐标系(杆件箭头方向)中的单元刚度矩阵均为(长度单位为m,角度单位为rad,力单位为kN)杆件(2)的轴向刚度为EA=1.5×l06kN,试形成结构的整体刚度矩阵。
图9.2解:(1)结构的结点位移编号及局部坐标方向(杆件箭头方向)见图9.1b。
(2)单元(1),(3)的局部与整体坐标方向一致,故其在整体坐标系中的单元刚度矩阵与局部坐标系中的相同。
(3)桁架单元(2)的刚度矩阵桁架单元只有轴向的杆端力和杆瑞位移,(3)定位向量单元(1):单元(2):单元(3):(4)整体刚度矩阵=3. 求图9.3a结构整体刚度矩阵。
各标EI相同,不考轴向变形。
图9.3解:(1)单元结点编号(图9.8b)(2)单元的定位向量(0051)T(0054)T(5354)T(5200)T (3)单元刚度矩阵(4)整体刚度矩阵第10章结构动力计算典型题1. 判断图10.1自由度的数量。
图10.12. 列出图10.2a结构的振动方程,并求出自振频率。
EI=常数。
图1解:挠度系数:质点m的水平位移y为由惯性力和动荷载共同作用引起:。
自振频率:3. 图10.3a简单桁架,在跨中的结点上有集中质量m。
若不考虑桁架自重,并假定各杆的EA相同,试求自振频率。
图10.3分析:结构对称,质量分布对称,所以质点m无水平位移,只有竖向位移,为单自由度体系。
龙驭球《结构力学》笔记和课后习题(含真题)详解(矩阵位移法)【圣才出品】

第9章 矩阵位移法9.1 复习笔记一、矩阵位移法的基本思路矩阵位移法又称为杆件结构的有限元法。
分析的两个基本步骤:(1)单元分析;(2)整体分析。
单元分析:建立杆端力与杆端位移间的刚度方程,形成单元刚度矩阵。
整体分析:将单元合成整体,按照刚度集成规则形成整体刚度矩阵,建立位移基本方程。
二、单元刚度矩阵(局部坐标系)进行单元分析,推导单元刚度方程和单元刚度矩阵。
单元刚度方程是指由单元杆端位移求单元杆端力的一组方程,可以用“”表示,由位移求力称为“正问题”。
相应的由力求位移称为“反问题”。
正问题的解是唯一的确定的,但是反问题则可能无解,如果有解也非唯一解。
当外部荷载为不平衡力系时,反问题无解;当外荷载为平衡力系时,反问题有解但是因为杆件除本身变形外还可有任意刚体位移,此时反问题的解不唯一。
本书暂不考虑反问题的求解。
1.一般单元图9-1所示为平面刚架中的一个等截面直杆单元.单元的两个端点采用局部编码1和2,由端点1到端点2的方向规定为杆轴的正方向,在图中用箭头标明。
F →∆e图9-1图中采用坐标系,其中轴与杆轴重合。
这坐标系称为单元坐标系或者局部坐标系。
字母、的上面都画了一横,作为局部坐标系的标志。
推导单元刚度方程时,有以下几点需要注意:重新规定正负号规则、讨论杆件单元的一般情况、采用矩阵表示形式。
在局部坐标系中,图9-2所示的位移、力分量方向为正方向。
图9-2杆件性质:长度l ,截面面积A ,截面惯性矩I ,弹性模量E ;杆端位移u 、v 、θ。
根据杆端位移可以推导出下面两组刚度方程:(9-1)x y x x y(9-2)将上述六个刚度方程列成矩阵形式:(9-3)其中就是局部坐标系下单元刚度矩阵,即为(9-4)2.单元刚度矩阵的性质 (1)单元刚度系数的意义e e ek F∆=eK代表单元杆端第j 个位移分量等于1时所引起的第i 个杆端力分量。
(2)是对称矩阵,即。
(3)一般单元的是奇异矩阵,即,因此不存在逆矩阵。
第9章 矩阵位移法 例题

第9章 矩阵位移法习 题9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。
题9-1图 9-2:求图示连续梁的整体刚度矩阵。
题9-2图9-3:求图示刚架的整体刚度矩阵。
(c )(e )题9-3图9-4:求图示组合结构的整体刚度矩阵。
题9-4图9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。
题9-5图9-6:求图示排架结构的整体刚度矩阵。
题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。
1kN/m题9-7图9-8:求图示结构的等效结点荷载,请利用结构的对称性。
题9-8图9-9:求图示结构的等效结点荷载。
题9-9图9-10:求出图示结构的荷载列阵。
题9-10图9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。
qq题9-11图9-12:求图示结构的荷载列阵,考虑轴向变形。
题9-12图9-13:求图示结构的荷载列阵。
题9-13图9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。
题9-14图10kN/mq9-15:请求出图示连续梁的整体刚度方程。
题9-15图9-16:求图示连续梁的整体刚度矩阵。
题9-16图9-17:图示结构温度发生了变化,请求出整体刚度方程。
杆件的EI 、EA 相同。
题9-17图9-18:图示结构温度发生了变化,请求出整体刚度方程。
题9-18图9-19:图示结构发生了支座移动,请画出结构的内力图。
00题9-19图9-20:已知图示梁B 点的B v 、B ϕ和C 点的C ϕ,请求出单元杆端力的列阵。
题9-20图9-21:求题9-3图示刚架的整体刚度矩阵,忽略轴向变形。
9-22:求题9-10图示结构的整体刚度矩阵,用后处理法编号。
9-23:求出梁的整体刚度方程,弹簧的刚度系数为k 。
题9-23图9-24:求出图示结构的整体刚度方程,忽略轴向变形,弹簧刚度系数为k 。
题9-24图L。
李廉锟《结构力学》(上册)配套题库【课后习题】(矩阵位移法)【圣才出品】
第10章矩阵位移法复习思考题1.矩阵位移法的基本思路是什么?答:矩阵位移法的基本思路:(1)单元分析单元分析是指将结构先分解为有限个较小的单元,即离散化,在较小的范围内分析单元的内力与位移之间的关系,建立单元刚度矩阵或单元柔度矩阵。
(2)整体分析整体分析将将单元分析中的各单元集合成原来的结构,要求各单元满足原结构的几何条件(包括支承条件、结点处的变形连续条件)和平衡条件,建立整个结构的刚度方程或柔度方程,以求解原结构的内力和位移。
(3)支承条件引入支承条件,修改结构原始刚度方程。
(4)求解解算结构刚度方程,求出结点位移,计算各单元杆端力。
2.试述矩阵位移法与传统位移法的异同。
答:矩阵位移法与传统位移法的异同点:(1)相同点传统位移法的基本原理,是以在小变形的基础的结构体系中,内力是可以叠加的,位移也是可以叠加的,而矩阵位移法是按传统位移法的基本原理运用矩阵计算内力和位移的方法。
因此矩阵位移法和传统位移法的基本原理在实质上是一致的。
(2)不同点①矩阵位移法中一般考虑杆件轴向变形的影响,传统位移法忽略杆件的轴向变形;②矩阵位移法一般在计算机上进行计算,可以解决大型复杂问题;传统位移法的计算手段一般是手算,只用来解决简单问题。
3.矩阵位移法中,杆端力、杆端位移和结点力、结点位移的正负号是如何规定的?答:杆端力沿局部坐标系的、的正方向为正,杆端弯矩逆时针为正;杆端位移的正负同杆端力和弯矩。
结点力沿整体坐标系x、y的正方向为正,结点力偶逆时针为正;结点位移的正负同结点力和力偶。
4.为何用矩阵位移法分析时,要建立两种坐标系?答:因为单元刚度矩阵是建立在杆件的局部坐标系上的,但对于整体结构,各单元的局部坐标系可能不尽相同,在研究结构的几何条件和平衡条件时,需要选定一个统一的坐标系即为整体坐标系,另外按局部坐标系建立的单元刚度矩阵可以通过坐标转换到整体坐标系中,从而得到整体坐标系中的单元刚度矩阵。
故建立两种坐标系使矩阵位移法的思路更清晰,物理意义更明确,且不会影响计算结果。
第8章矩阵位移法例题 结构力学

0
K
(2)
0
对
0 0.0142
称
0 0.060 0.3396
2.8285 0 0
2.8285
0 0.0142
0.060 0
0.0142
0
0.060
0.
1698
0
105
0.060
0.3396
4.列出整体坐标表示的单元刚度矩阵
单元(1)(3)的单元坐标和整体坐标一致,所以
4 0
0 4 0
l
1 ql
1 ql
2
2
p
1 pl 8
1 pl 8
l
l
2
2
1p
1p
2
2
第8章矩阵位移法
例题 2 (1)求各单元在局部坐标系中固端力向量
例题 2
第8章矩阵位移法
(2)将
转换成
单元①
单元②
例题 2
第8章矩阵位移法
(3)利用单元定位向量,将
中元素反号后叠加集成
第8章矩阵位移法
例题 3
图示桁架,已知结点位移列阵
0
0
0.04 0.12
0
0.04 0.12
K
(1)
K
(3)
0
0.48
0 4
0.12 0
0.24 0
105
对 称
0.04 0.12
0.48
单元(2)的单元坐标和整体坐标不一致,必须经过以下变换
第一种方法: 直接代入公式:
2 1 2i 2 BCx l2 Cy
(e)
K
1 2i (B l2 )CxC y
0
0
1
第8章矩阵位移法
9矩阵位移法习题.docx

第9章矩阵位移法习题解答习题9・1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
(T )(2)矩阵位移法棊木未知量的数冃与位移法棊木未知量的数冃总是相等的。
(|T*) F(3)单元刚度矩阵都具有对称性和奇界性。
(F )(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
(T )(5)结构刚度短阵与单元的编号方式冇关。
(F )(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
(F )【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错谋。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统-•编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1) ______________________________________________________________ 矩阵位移法分析包含三个基本环节,其一是结构的___________________________________ ,其二是_________ 分析,-其三是______ 分析。
(2)已知某单元©的定位向量为[3 5 6 7 8 9]丁,则单元刚度系数紜应叠加到结构刚度矩阵的元素—中去。
(3) ________________________________________________________________________ 将非结点荷载转换为等效结点荷载,等效的原则是____________________________________ o(4)矩阵位移法屮,在求解结点位移之前,主要工作是形成_____________________ 矩阵和_______________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为J2=[w2V2 ft]T=[O.S 0.3 0.5]丁,单元①的始、末端结点码为3、2,单元定位向量为= [0 0 0 3 4 5]T,设单元与兀轴之间的夹角为« = |,则(6 )用短阵位移法求得平面刚架某单元在单元坐标系中的杆端力为戸=[7.5 -48 -70.9 -7.5 48 -121.09]7,则该单元的轴力F* _______________________ k N。
矩阵位移法习题(1)
单元②: 0 0 0 F F ② 0 0 0
e ○
FE ②
2、整体坐标下单元等效结点荷载列向量 FEe
通过坐标转换,将局部坐标下单元等效结点荷载列向量 FEe 转换为整体坐标系下单元等效结点荷载
e e 列向量 FE ,并在整体坐标系下单元等效结点荷载列向量 FE 一侧标注单元定位向量。
F e F F Fe F F k e e
e
e
结构内力
e F e e 方法2: F F Tk e
通过单元定位向量
将结点位移转换为单元 的杆端位移
e
由单元刚度方程 求得整体坐标系下由杆端位移 引起的杆端力列向量
Fe k e e
坐标转换 整体坐标系下杆端位力向量转换为 局部坐标系下杆端力列向量
E=200*10^9; I=32*10^-5; A=1*10^-2; EA l L=[4,5]; For i=1:2 0 F1=E*A/L(i); 0 F2=12*E*I/L(i)^3; e k F3=6*E*I/L(i)^2; EA F4=4*E*I/L(i); l F5=2*E*I/L(i); 0 K1=[F1,0,0,-F1,0,0; 0,F2,F3,0,-F2,F3; 0 0,F3,F4,0,-F3,F5; -F1,0,0,F1,0,0; 0,-F2,-F3,0,F2,-F3; 0,F3,F5,0,-F3,F4]; end
1 2 3 0 4 0 单元定位向量 单元定位向量
4.937 9.456 4 10 33 . 45 126.355 单元②:
1 2 3 4
4.937 9.456 4 10 33 . 45 126.355
结构力学之矩阵位移法

第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解•基本未知量和基本结构的确定用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
•位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K•系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,l EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,l EI EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得81Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI •解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl •由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解•对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
《结构力学习题集》(下)-矩阵位移法习题及答案 (2)
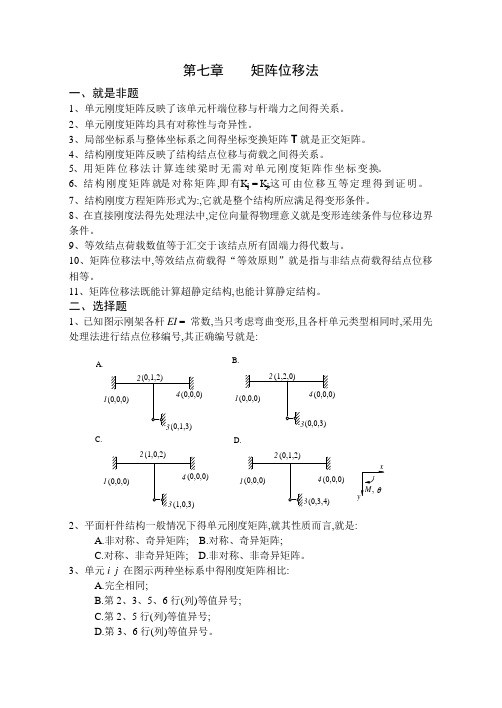
第七章 矩阵位移法一、就是非题1、单元刚度矩阵反映了该单元杆端位移与杆端力之间得关系。
2、单元刚度矩阵均具有对称性与奇异性。
3、局部坐标系与整体坐标系之间得坐标变换矩阵T 就是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间得关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 就是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:,它就是整个结构所应满足得变形条件。
8、在直接刚度法得先处理法中,定位向量得物理意义就是变形连续条件与位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力得代数与。
10、矩阵位移法中,等效结点荷载得“等效原则”就是指与非结点荷载得结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
二、选择题1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号就是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下得单元刚度矩阵,就其性质而言,就是:A.非对称、奇异矩阵;B.对称、奇异矩阵;C.对称、非奇异矩阵;D.非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中得刚度矩阵相比:A.完全相同;B.第2、3、5、6行(列)等值异号;C.第2、5行(列)等值异号;D.第3、6行(列)等值异号。
4、矩阵位移法中,结构得原始刚度方程就是表示下列两组量值之间得相互关系:A.杆端力与结点位移;B.杆端力与结点力;C.结点力与结点位移;D.结点位移与杆端力。
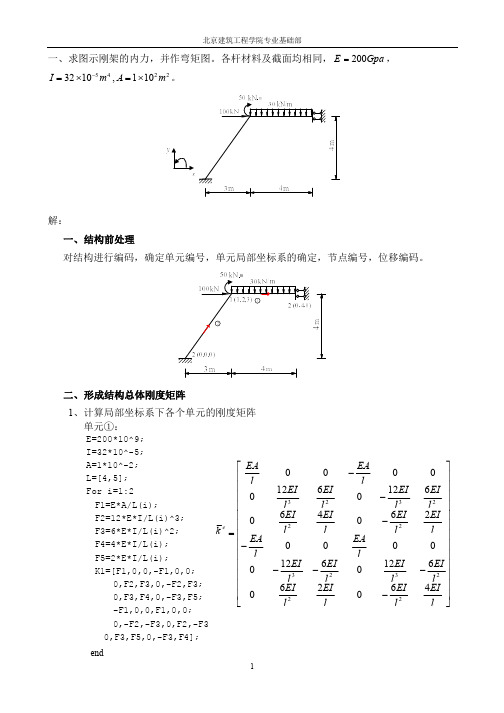
【精选】结构力学-矩阵位移法答案 doc资料
结构力学-矩阵位移法答案第七章 矩阵位移法(参考答案)四、1、[]K i i i i i i i i i =⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥4202224122223333(+) 4(+) 02、[]K i i i i i i i =⎡⎣⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥840012216612 0 对称,i EI l =/ 3、{}P ql ql ql ql =--⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪2222242524248//// 4、{}[]T ql ql pl pl M P 12/)12/8/()8/(22-+-+=5、42.8851.4090(kN m).M6、R ql B=↑067857.() 7、⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡3320392422821θθi i i i⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧39821121i θθ ()()⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧01249826221121M M M M8、[]K 2221636003600=⨯⎡⎣⎢⎤⎦⎥ 6104 9、[]K i l i l i l i i i i EI l =-⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥=366622/// 12 4对称,式中: 10、(0,0)(1,2)(0,3)(0,0)① ② ③{}P =--⋅-⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 5kN m 16kN m 211、{}[]T P 0 34 7-=12、 {}{}{}{}δδ①②①②=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=---⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪ , , , 005120512000525252525252525233l EI l EI F F 13、i K l EI i i K l EA k k l i K 4,/,12,/,/361333222====+=14、K EA l EI l K EI l K 223342151260=+==//,/,15、[][][][][][]K K K K K K 222222222421=++=①②③③,16、[][][][][][][][]K K K K K K K K =+++⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥22222112112222①③③③③②④17、[]⎥⎦⎤⎢⎣⎡=336lEI K18、(0,0,0)统一编码如图:① ② ③ (1,0,4)63(0,0,0)1(1,0,2)4(1,0,3)5(0,0,0)219、k k k k k k 221112212222①②②②②③++⎡⎣⎢⎢⎤⎦⎥⎥ 20、21、{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=2kN.m 12kN 2kN 3EP 22、{}P ql ql ql 2E 24=--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪//22223、P ql P ql P ql 1324224===-,/,[]4 0 4 0 0 46- 0 0 12223⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+=l EI l EI l EIl EI l EI l EA K []K =⨯⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥1061203003240300300424、{}P ql ql ql =-⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ ///222524225、P ql P ql P ql 45622212==-=/,/,/26、P p l P P ql P M P l q l 113341282812=-=--=-+,,27、P ql P ql P ql P 327891112220==-=-=/,/,/,28、{}[]P =---6 22 14 5 12 18T29、{}[]P =---4 10 4 0 6 4T30、{}P P P Pl 2 =--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪///2323431、(0,0,0)(1,4,3)(0,0,0)(1,2,3)1234 {}P =---⋅⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪38170kN kN kN m32、(1,0,2)(3,4,5)(0,6,0,)(0,0,0) {}P ql ql ql ql ql =--⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 01112238222//// 33、{}[]P T 40 -32 -14=34、{}P =--⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 10kN 10kN m 1035、{}TPl ql ql P P ⎥⎦⎤⎢⎣⎡+--=812,2,2,0,0236、{}[]∆=0 0 0 -0.1569 -0.2338 0.4232 0 0 0T,2336.02=②F37、F F 3603330333=⋅=-⋅.,.kN m kN m38、{}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧----=kN.m kN kN kN.m kN kN 1321726.193.19561.651726.193.19③F39、40、{}Fql ql ql ql ①分=⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 007902340020800575722....() 41、M 28925②=-.kN 42、123①②③ (0,0)(0,0)(0,1)(0,1)(2,3)(2,3)[]K EA l =⨯+-+---⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥24221111221111143、{}P =⎧⎨⎩⎫⎬⎭8kN 6kN 44、{}[]kN P T 40,30,20,10--=45、{}F①=-⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪1116011160..kN46、{}∆=(/())1EA ×[]T 1167.111- 137.680-01139.555- 00322.342 {}[]F①=-85581.kN 85.581kN T47、NP ①=3(压 力 )48、{}⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-=0505 kN kN ①F49、l EAlEI K +=3441245=K2134(1,2,3)(10,11,12)(7,8,9)(4,5,6)(4,5,0)①②③(7,8,0)50、(0,0,0)(0,0,0)(1,2,3)(0,0,0)(1,2,0)③①②1352451、K EA l K EI l EA l K EI l 4455366336412==+=/,//,/ 52、积分变换法求解定解问题为了说明傅氏变换法解非齐次方程特别简便,我们特举一强迫弦振动问题: 求解无限长弦的强迫振动方程的初值问题200(,), ()|() |()tt xx t t t u a u f x t x u x u x ϕψ==⎧-=-∞<<∞⎪=⎨⎪=⎩ 【解】 作傅氏变换[(,)](,), [(,)](,),[()](), [()]()u x t U t f x t F t x x ωωϕωψω===Φ=ψF F F F我们容易得到原定解问题可变换为下列常微分方程的问题222200(,)(,)(,)|(),(,)|(),t t t U a U t F t t U t U t ωωωωωωω==⎧∂+=⎪∂⎪⎨=Φ⎪⎪=ψ⎩上述问题的解为01()(,)(,)sin ()d ()cos()sin()t U t F a t at a t a a ωωωτωττωωωωωψ=-+Φ+⎰利用傅氏变换的性质有1 1[(,)](,)1[(,)](,)d i xx F t f x t F f ωωτξτξω--==⎰F F故得到()1i ()1[(,)](,)d i x a t a t x e F t f τωτωξτξω±--±-=⎰F i ()i ()1sin[()][]2i a t a t a t e e ωτωτωτ----=-代入得到()()01(,)[(,)d (,)d ]d 211 [()()]()d 22t x a t x a t x x x atx at u x t f f a x at x at a ττξτξξτξτϕϕψξξ+---+-=-+++-+⎰⎰⎰⎰即得()0()1(,)(,)d d 211 [()()]()d 22t x a t x a t x atx at u x t f ax at x at a ττξτξτϕϕψξξ+---+-=+++-+⎰⎰⎰例15.2 求解无限长细杆的热传导(无热源)问题200, (,0)|() t xx t u a u x t u x ϕ=⎧-=-∞<<∞>⎨=⎩【解】 作傅氏变换,[(,)](,)u x t U t ω=F [()]()x ϕω=ΦF 定解问题变换为22(,)0(,0)()U a U t U ωωωω'⎧+=⎨=Φ⎩ 常微分方程的初值问题的解是22(,)()a tU t e ωωω-=Φ 再进行逆傅里叶变换,22221i i i 1(,)[(,)]()d 2π1 [()d ]d 2πa t x a t x u x t U t e e e e e ωωωξωωωωωϕξξω∞---∞∞∞---∞-∞==Φ=⎰⎰⎰F交换积分次序得22i ()1(,)()[d ]d 2πa t x u x t e e ωωξϕξωξ∞∞---∞-∞=⎰⎰引用积分公式22224d e e eβσωβωσω∞--∞=⎰且令 i()x σβξ==- 以便利用积分公式,即得到天津大学专用纸学院专业班年级学号共 3 页第 1 页。
结构力学自测题(第八单元)矩阵位移法

q M
10kN/m 2EI 6m
y
l
y
M, x
l
七、图 a 所示结构,整体坐标见图 b,图中圆括号内数码为
结点定位向量(力和位移均按水平、 竖直、 转动方向顺序排列 )。求等效结点荷载列阵 PE 。(不考虑轴向变形)
于: A. 6 ; C.10 ;
20kN/m M1 1 Y1 2m 2 4m 3 y M, x
e
T K
e
。
(
)
二、选择题(将选中答案的字母填入括弧内) 1、已知图示刚架各杆 EI=常数,当只考虑弯曲变形,且各
杆单元类型相同时,采用先处理法进行结点位移编号,其正 确编号是:
是:
附:
EA l 0 0 EA l 0 0
0 12EI l 6 EI l 0 12EI l 6 EI l
2 3 2 3
0 6 EI
2
EA l 0 0 EA l 0 0
0 12EI l 6 EI l
2 3
l 4 EI l 0 6 EI l 2 EI l
(1,0,2) i 6m ② (0,0,0) 6m (a) y M, x (b) i ① (1,0,3)
1 3 1m 1m
y 5
M, x
十、试用矩阵位移法解图示连续梁,绘弯矩图。EI=已知常
数。
50 kN. m B EI 4m 20 kN C 2m D x M,
六、求图示结构的自由结点荷载列阵 P 。
A. 2(0,1,2) 1(0,0,0) 4(0,0,0) 3(0,1,3) C. 2(1,0,2) 1(0,0,0) 4(0,0,0) 3(1,0,3) 1(0,0,0) D. 2(0,1,2) 4(0,0,0) 1(0,0,0) B. 2(1,2,0) 4(0,0,0) 3(0,0,3) y M, x
结构力学习题集矩阵位移法习题及答案老八校
1文档收集于互联网,已整理,word 版本可编辑.第八章 矩阵位移法 – 老八校一、判断题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
10、矩阵位移法既能计算超静定结构,也能计算静定结构。
11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 二、计算题:12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
14、计算图示结构整体刚度矩阵的元素665544,,K K K 。
E 为常数。
15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。
,cos α=C ,sin α=S ,C C A ⋅= S S D S C B ⋅=⋅=,,各杆EA 相同。
2文档收集于互联网,已整理,word 版本可编辑.17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。
设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。
18、计算图示结构原始刚度矩阵的元素4544,K K 。
《结构力学习题集》(含答案)
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
aa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
qlll /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI = 常数 。
l/217、求图示刚架横梁中D点的竖向位移。
EI = 常数 。
18、求图示刚架中D 点的竖向位移。
E I = 常数 。
qll/219、求图示结构A、B两截面的相对转角,EI = 常数 。
l/23l/320、求图示结构A 、B 两点的相对水平位移,E I = 常数。
ll21、求图示结构B 点的竖向位移,EI = 常数。
《结构力学习题集》-矩阵位移法习题及答案

第八章 矩阵位移法一、判断题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
10、矩阵位移法既能计算超静定结构,也能计算静定结构。
11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.2134123412341234xy M , θ( )二、计算题:12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
123ll4ll5EI2EIEA(0,0,0)(0,0,1)(0,2,3)(0,0,0)(0,2,4)(0,0,0)xyM , θEI13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
l(0,0,1)(0,5,0)(2,3,4)l①②123xy M , θ14、计算图示结构整体刚度矩阵的元素665544,,K K K 。
E 为常数。
l l l1342A , I AA /222A I , 2A xyM , θ15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
习题课1 矩阵位移法(含答案作业)518706462
k44 k45 k46
k54 k55 k56
0 0 1 0 02
k64 k65 k66
0 k11 k12 k13
k16
0 k21 k22 k23
k26
[ ] = k 2 1 k31 k32 k33
k36
0
0
2 k61 k62 k63
k686
0 0 1 3 04
0 k11 k12 k13 k14 k15 k16 0 k21 k22 k23 k24 k25 k26
(0,0,0) (0,0,1) (0,0,2)
(0,0,0) (1,2,3) (0,0,4)
1
2
3
①
②
x③
y
((53,,60,,85) )5
4(3,0,4) (5,6,7)
④
(0,0,0) 6(0,0,0)
不考虑轴向变形 考虑轴向变形
7
(1) 不考虑轴向变形
0 0 0 0 01 0 0
0
[k ] 1= 0 0 1
(↑↓)
16
分别作上述两种情况下的弯矩图,如下图示。 据此容易得出含铰单元的刚度矩阵[K]。
3EIa2 a3 + b3 A
3EIab a3 + b3
B
3EIab a3 + b3 A
3EIb2 a3 + b3
B
3EIa
−3EIa
a3 + b3
a3 + b3
θ
e A
=1
a2
[k]e =
ab
3EIb
−3EIb
k k (2) (2) 63 66
0
0
00
k k k 5 (3) (3) (3) 41 42 43
结构力学自测题(第八单元)矩阵位移法
1kN 1kN 2 4 6 1m
17265 . 1.6408 0 1.2084 0.4007
T
五、图 a 所示结构(整体坐标见图 b),图中圆括号内数码为
结点定位向量(力和位移均按水平、 竖直、 转动方向顺序排列 )。求结构刚度矩阵 K 。(不考虑轴向变形)
A. 2(0,1,2) 1(0,0,0) 4(0,0,0) 3(0,1,3) C. 2(1,0,2) 1(0,0,0) 4(0,0,0) 3(1,0,3) 1(0,0,0) D. 2(0,1,2) 4(0,0,0) 1(0,0,0) B. 2(1,2,0) 4(0,0,0) 3(0,0,3) y M, x
14 kN/m ① ② x 6m (a) y M, (b) (1,0,3)
3 (b)
6
3m
3 、 图 示 梁 结 构 刚 度 矩 阵 的 主 元 素
K11 , K22
1 2 EI l EI l
。
2 y M, x
八、已知图示连续梁结点位移列阵 如下所示,试用矩阵
位移法求出杆件 23 的杆端弯矩并画出连续梁的弯矩图。 设q
是:
附:
EA l 0 0 EA l 0 0
0 12EI l 6 EI l 0 12EI l 6 EI l
2 3 2 3
0 6 EI
2
EA l 0 0 EA l 0 0
0 12EI l 6 EI l
2 3
l 4 EI l 0 6 EI l 2 EI l
2
0 12EI l 6 EI l
2 3
6 EI 2 l 2 EI l 0 6 EI 2 l 4 EI l