三关节机械臂设计
三自由度机械臂毕业设计

三自由度机械臂毕业设计摘要三自由度机械臂是一种常见的机器人结构,具有广泛的应用领域。
本文基于毕业设计的要求,对三自由度机械臂的设计与实现进行了探讨,包括机械结构设计、电控系统设计以及仿真测试等内容。
通过本文的研究,可以为相关领域的机械臂设计提供一定的参考和借鉴。
关键词:三自由度机械臂;机械结构设计;电控系统设计;仿真测试一、引言随着现代工业的发展,机械臂作为一种重要的智能装备,已经得到了广泛的应用。
特别是在自动化生产线、物流仓储系统、医疗和服务机器人等领域,机械臂可以实现高效的操作和灵活的生产。
对机械臂的设计与实现具有重要的理论和实际意义。
三自由度机械臂是一种典型的机械臂结构,在许多应用场合中都能够发挥重要作用。
本文将以三自由度机械臂为研究对象,通过对其机械结构设计、电控系统设计以及仿真测试的探讨,来完成一份关于三自由度机械臂的毕业设计。
二、机械结构设计1. 机械臂的型号确定需要确定三自由度机械臂的型号和结构设计。
在设计过程中,需考虑机械臂的负载能力、工作范围和精度等参数。
通过对市场上已有的机械臂产品进行调研和比较,选择一款适合要求的机械臂型号作为设计的基础。
2. 机械结构的参数设计在确定机械臂型号后,需要对机械结构的参数进行设计。
包括机械臂的长度、关节结构、材料选择等。
需要考虑机械臂的刚度和稳定性,以及对机械结构进行强度和刚度分析,保证机械臂能够满足设计要求。
三、电控系统设计1. 电机和传动系统的选型根据机械臂的参数设计,选择合适的电机和传动系统。
需要考虑电机的功率、转速和控制方式,以及传动系统的精度和可靠性。
2. 控制系统的设计设计机械臂的控制系统,包括控制算法、传感器选择和控制器设计等。
通过对电控系统的设计,实现机械臂的轨迹规划、位置控制和力控制等功能。
四、仿真测试通过建立机械臂的仿真模型,对机械结构设计和电控系统设计进行验证和测试。
利用仿真软件,模拟机械臂的运动和控制过程,评估机械臂的性能和稳定性。
机械臂控制系统的设计
机械臂控制系统的设计1 引言近年来;随着制造业在我国的高速发展;工业机器人技术也得到了迅速的发展..根据负载的大小可以将机械臂分为大型、中型、小型三类..大型机械臂主要用于搬运、码垛、装配等负载较重的场合;中小型机械臂主要用于焊接、喷漆、检测等负载较小的场合..随着国外工业机器人技术的不断发展;尤其是一些中小型机器人;它们具有体积小、质量轻、精度高、控制可靠的特点;甚至研发出更为轻巧的控制箱;可以在工作区域随时移动;这样大大方便了工作人员的操作..在工业机器人的应用中最常见的是六自由度的机械臂..它是由6个独立的旋转关节串联形成的一种工业机器人;每个关节都有各自独立的控制系统..2机械臂硬件系统设计2.1 机械臂构型的选择要使机器臂的抓持器能够以准确的位置和姿态移动到给定点;这就要求机器人具有一定数量的自由度..机器臂的自由度是设计的关键参数;其数目应该与所要完成的任务相匹配..为了使安装在双轮自平衡机器人上的机械臂能够具有完善的功能;能够完成复杂的任务;将其自由度数目定为6个;这样抓持器就可以达到空间中的任意位姿;并且不会出现冗余问题..在确定自由度后;就可以合理的布置各关节来分配这些自由度了..由于计算数值解远比封闭解费时;数值解很难用于实时控制;这样;后3个关节就确定了末端执行器的姿态;而前3个关节确定腕关节原点的位置..采用这种方法设计的机械臂可以认为是由定位结构及其后面串联的定向结构或手腕组成的..这样设计出来的机器人都具有封闭解..另外;定位结构都采用简单结构连杆转角为0或90°的形式;连杆长度可以不同;但是连杆偏距都为0;这样的结构会使推倒逆解时计算简单..定位机构是涉及形式主要有以下几种:SCARA型机械臂;直角坐标型机械臂;圆柱坐标型机械臂;极坐标型机械臂;关节坐标型机械臂等..SCARA机械臂是平面关节型;不能满足本文对机械臂周边3维空间任意抓取的要求;直角坐标型机械臂投影面积较大;工作空间小;极坐标方式需要线性移动;机械臂如需较大的工作空间;则臂长较长;和其他类型相比关节型机械臂在其工作空间内干涉是最小的;是一种较为优良的结构..所以初步确定本文机械臂构型为关节型..2.2臂杆长度的确定机械臂的臂杆设计如表2-1所示:表2-1 机械臂臂杆长度臂体名称大臂L1 小臂L2 机械手长度mm 550 500 1502.3 机械臂结构设计2.3.1 关节结构方案为了便于机械臂关节的模块化涉及和简化结构;本设计使用电机直接连接减速器;减速器连接臂体连接结构..图2-1是关节结构动力传递方案..图2-1 关节结构动力传递方案使用这种联接方式因中间零件少;故形变量与回程间隙都较小;且能保持较高的结构刚度..2.4 关键部件的选型2.4.1 关节负载的估算各关节的动态参数是驱动元件的选择和关节传动零件选择的重要依据..由机器人动力学相关知识可知完整的机器人动力学方程为:式中一般使用静力学方法和动力学方法计算机器人的动力参数;速度较低的机械;在运行过程中;惯性引起的动载荷较小;一般使用静力学方法;忽略C和F的影响..而对于运行速度较高机械;其动载荷也较大;即C项的影响较大;甚至超过静载荷;且粘滞摩擦也较大;同时考虑静载荷和动载荷;需使用动力学计算..本文的设计要求是一款可以安装在全向移动平台上的轻型机械臂;对关节的旋转速度要求不高;因此估算机械臂力矩时采用静力学方法..图2-2 机械臂受力简图估计关节力矩之前;首先假设每个关节的重力作用集中在中心;将连杆的重量均分于各关节;机械臂受力简图如图 2-2 所示;使用静力学方法计算关节所受力矩的最大值..六自由度机械臂三维静态仿真图如图2-3所示:图2-3 三维静态仿真图2.4.2 关节驱动系统电机的选型机械臂的驱动系统;有三种基本类型;即电动驱动、液压驱动和气动驱动;也可以根据需要组合成为复合式的驱动系统..1 电机驱动目前机械臂上使用最多的一种驱动方式是电动驱动;它利用各种电机产生的力和力矩;直接或通过机械传动装置来驱动执行机构..这类系统效率比液压驱动和气动驱动系统高;且电源方便;所以在机器人中得到了广泛的应用..2 液压驱动液压驱动的主要优点是功率密度大..液压缸也可直接作为臂体的一部分;因而结构紧凑;刚性好..由于液压油液的不可压缩性;系统的固有频率较高;快速响应好;可实现频繁平稳的变速和换向..液压系统易于实现过载保护;动作平稳、耐冲击、耐振动、防爆性好..3 气动驱动气动驱动系统通常由气缸、气阀、气罐和空压机组成;其特点是气源方便、结构简单、造价较低、维修方便..与液压驱动系统相比;同体积条件下功率较小;也难以进行速度控制;多用于中、小负荷且精度要求不高的机器人控制系统中..综上;本设计决定使用电动驱动方式为机械臂提供动力;步进电机为驱动电机..2.4.3驱动系统减速器的选型结合上文;本文将使用步进电机为驱动电机为机械臂提供动力;结合各关节受力和机械臂关节传动机构组合方式;应在驱动电机和机械臂关节间安装减速器做扭矩适配;降低输出轴的速度;增大输出扭矩..一般行星齿轮减速器、蜗轮蜗杆减速器、谐波减速器、齿轮减速器等可以和步进电机适配..1、行星齿轮减速器行星齿轮减速器通常由一个或者多个外部齿轮围绕着一个中心齿轮旋转;就像行星绕着太阳公转一样..在工作状态中多个行星齿轮协同工作;因而承载能力大;属纯扭矩传动;工作平稳..单级行星齿轮减速器的减速比一般较小;需要增加减速比时只需增加行星轮系的级数即可;而整体体积变化较小..2、蜗轮蜗杆减速器蜗轮蜗杆减速器的传动比大;一般为 10-80;也可以达到 80 以上..此外;蜗轮蜗杆减速器机械结构紧凑、热交换性能好、工作平稳、噪声小、具备机械自锁能力;安全性高..3、谐波减速器波发生器;柔轮;刚轮是谐波减速器的三大部分;谐波齿轮减速器传动结构简单;减速比高;同时啮合的齿数多;运行平稳、传动承载力大;齿侧间隙小;传动精度高;传动误差只有普通圆柱齿轮传动的 1/4 左右;传动空程小;适用于反向转动;在机器人领域有着广泛应用..但对柔轮材料有较高的强度要求;工艺复杂..4、齿轮减速器圆柱齿轮减速机构为定传动比齿轮机构;其传动准确;平稳高效;传动功率范围和速度范围大;广泛用于各种仪器仪表中;但其制造和安装精度要求高;高减速比时结构较为复杂;体积一般较大..综上;初步去确定使用谐波齿轮减速器;减速比大;传动精度高;体积小巧;输入轴与输出轴轴线重合;可很方便地与步进电机组合安装成为机械臂关节的一部分;同时便于机械臂的模块化设计..本文将采用 Harmonic Drive CSF-mini 系列组合型谐波减速器;其中腰关节采用型号为 CSF-14-100-2XH-F;肘关节俯仰和肘关节旋转采用 CSF-11-100-2XHF;腕俯仰采用 CSF-8-100-2XH-F..2.4.4电机驱动器的选型虽然步进电机广泛地应用于各行各业;但步进电机并不能像普通的直流电机那样通过控制输入的等效电压就可以驱动和调速..它必须利用电子电路;将直流电变成分时多相时序控制电流;用这种电流为步进电机供电;步进电机才能正常工作..常见的有单片机 I/O 直接控制;步进电机驱动芯片、运动控制卡..1、单片机 I/O 直接控制方式使用单片机内部的锁存器、计数/定时器;和并行 I/O 接口;可以实现对步进电机的控制;脉冲环形分配器的功能由单片机系统实现完成;通过软件中断方式实现步进电机的变速控制;改变通电顺序则可改变转向..2、步进电机专用驱动芯片步进电机专用驱动芯片一般集成度较高;外围电路简单;一般有 ENABLE、STEP 和 DIR 三个输入端;ENABLE 为使能端;使能有效时方可驱动步进电机;STEP 为脉冲输入;输入一个脉冲;即可驱动步进电机产生微动;DIR 为方向 ;改变 DIR 逻辑电平即可换向..3、运动控制卡驱动控制通过计算机可直接控制步进电机;运动控制卡是专用于步进电机控制的 PC 插卡;是应对复杂系统的控制而出现的;一般可同时控制十几台甚至几十台步进电机的运动;一般价格很高..综上;本设计将使用步进电机专用驱动芯片来驱动步进电机..其中肩关节和肘关节俯仰有自锁需求;使用东芝 THB7128 3A 128 高细分步进电机专用驱动芯片驱动;其他轴选用 A4988 微步驱动器..2.4.5传感器的选型本文将使用步进电机和谐波齿轮减速器为机械臂提供动力;步进电机只需要通控制驱动脉冲的数量;即可简单实现较高精度的定位;并使工作物在精确地停在目标位置..步进电机以细分后的步距角为基本单位进行定位..以两相电机为例;其步距角为1.8°;使用 1/16 细分方式进行驱动;那么每给驱动器一个脉冲步进电机转子旋转的角度为角度=1.8°1/16=0.1125°;转子旋转一周需要脉冲数为360°/0.1125°=3200;需要旋转到其他任意角度的计算方式与上式相同..本文使用限位开关的型号为 Omron 微动开关 SS-5 摆杆型限位开关..2.4.6下位机的选型对于机器臂控制;需要对多台电机进行联动控制..为了实现多台电机之间的通信和控制;必须建立一套数据通信系统来完成主计算机与各运动控制单元间的数据交换..基于现场总线的分布式控制技术能够解决这些问题..但常见的分布式控制系统又有 USB 总线;SERCOS总线;RS-485 总线和 CAN 总线等这几种..本设计将采用RS-485 总线来实现机械臂的分布式控制..本设计选用了TI公司的2000系列 DSP TMS320LF2407 作为控制单元..其时钟频率可达 40MHz;具有高速的处理能力;片内资源丰富;特别是它特有两个内置事件管理器模块EVA、EVB..通过JTAG 接口可以方便的对 DSP 进行全速的在系统调试仿真..TMS320LF2407 的电源电压为 3.3V;正常下作电流为 80m A 左右;抗干扰能力较强..关节控制器硬件电路关节控制器是以 DSP 芯片为核心;芯片本身及其外围电路的性能直接决定了系统的性能..故芯片的选择及其外围电路的设计;也就显得十分的重要..下面将通过单个模块电路的方式分别介绍控制器硬件电路..(1)电源电路通过开关电源;接入B0505LS模块产生稳定的的5V 电压作为TPS7333芯片的供电电压;管脚8做为2407 的上电复位信号..管角 5;6 通过滤波电容输出作为 2407 的供电电压3.3V..如图2-5..图2-4 电源电路(2)时钟电路TMS320LF2407 的时钟源可以来自外部有源晶振也可以用晶体;利用内部振荡器..一般经常使用外部时钟输入;因为使用外部时钟时;时钟的精度高、信号比较稳定;外部时钟电路和锁相环电路如图 2-6 所示..图2-5 时钟电路(3)JTAG 接口电路仿真接口电路如图2-7所示.目标层次的TI调试标准使用5个标准的IEEE1149.1JTAG信号TRST、TCK、TMS、TDI、TDO和两个TI扩展口EMU0、EMU1..JTAG 目标器件通过专用的仿真端口支持仿真;此端口由仿真器直接访问并提供仿真功能..JTAG 接口电路为仿真器与微机的接口电路;便于系统进行在线调试..图2-6 JTAG电路(4)外接SRAM电路TMS320LF2407最多可寻址64K的外部程序空间和64K的外部数据空间..由于控制算法的需要;本系统需扩充外部 RAM..TMS320LF2407片内的 Flash可用作程序存储器;但在开发阶段使用 Flash 作为程序存储器极为不便;因为每一次程序的修改都需要对 Flash 进行清除、擦除和编程操作;而且进行CCS 调试时只能设置硬件断点;故从调试的角度考虑;应扩充程序 RAM..这里用的是CY7C1021V33芯片;它是64K16bit的SRAM;存取时间为15ns;故不需要插入等待周期;可保证系统全速运行..图 2-8 为外接 SRAM 扩展电路图..图2-7 SRAM扩展电路图(5)编码器处理电路增量式编码器信号处理电路如图2-9所示..图 2-8 增量式编码器信号处理电路(6)霍尔接近开关电路本设计选用 A31443E 常开型霍尔接近开关..其接法如图 2-10;提供电压为5V;由于输出采用了集电极开路门;必须通过 10K 的上拉电阻接到 5V 电源上..当磁源的某一极与霍尔传感器的距离达到一定范围以内时;输出低电平;否则输出高电平;不需要外接放大电路..一套关节控制器将采用 3 支霍尔接近开关..HALL1、HALL2 分别固定在关节控制器运动的极限位置;其信号通过 IOPE5、IOPE6 不断查询..HALL3 用于绝对零位检测;采用中断的方式..图2-9 霍尔接近开关的接法2.5 机械臂的模块化设计机械臂的大小臂体和关节在整个机械臂中具有高度的相似性;同时机械臂是机电一体化的典型;其主体结构和联接结构都有一定的复杂性;而采用模块化设计思想;可以一定程度上简化设计流程;只需对不同的应用对象进行少量修改便可完成组合适配..2.5.1 旋转关节的设计机械臂的基本单元有旋转关节和俯仰关节;其结构具有相似性;本文重点介绍旋转关节的设计..旋转关节包含有电机、减速器、编码器、制动器以及其他附件;本文使用步进电机直连谐波减速器的驱动方式;使用限位微动开关确定机械臂初始定位零点;以计步进电机已发脉冲数为关节相对旋转角度参考;是一个开环的运动控制系统;动力传递链路为:电机--波发生器--柔轮--刚轮—输出轴..机械臂的旋转关节模块在运行过程中会受到来自机械臂末端的弯矩;因此需要对输出轴做轴向和径向卸荷;减少输出轴的负载;保证系统的刚度;延长使用寿命..一般来说;一根轴需要两个支点;每个支点由一个或一个以上的轴承组成;每组轴承间有以下三种常用的配置方法..1、双支点各单向固定这种轴承配置常用两个反向安装的圆锥滚子轴承或角接触球轴承;两个轴承各限制轴向一个方向的轴向移动..这种配置方式轴向移动限制比较精确、也便于调整轴承的预紧程度..另外深沟球轴承也可用于双支点各单向固定;通过调整外壳与轴承端盖端面的厚度来补偿轴的受热伸长;因而这种配置方式不适合需要对轴做精确轴向定位的场合..2、一支点双向固定;另一端支点游动对于热伸长量较大的轴;这种轴一般跨距较大且工作温度较高;应该采用一支点双向固定;另一支点游动的支撑结构..其双向固定端需要使用能承受双向轴向载荷的轴承;内外圈都需要固定..3、两端游动支撑对于人字齿轮轴;由于本身具有相互间的轴向限位作用;其中只需保证一根轴与机座有相对固定的轴向位置;另一根轴上的两个轴承必须游动;防止人字齿轮卡死或两侧受力不均匀..本文将采用一支点双向固定;另一端支点游动的方式组合成卸荷轴承组;其中双向固定端使用深沟球轴承;游动端使用滚针轴承..其中腰关节使用型号为 HRB 61809-2Z、SKF HK5020;肘关节旋转使用型号为 HRB 61806-2Z、SKF HK3512..2.5.2 旋转关节的设计各运动轴基于模块化设计;设计时已考虑各运动轴的联接;使用简单的金属板件便能将各运动轴连接可靠;并具有一定的刚度..本文各运动轴均为法兰端面输出;与金属板材间通过螺钉联接固定;依靠金属板与法兰端面的摩擦力传递扭矩到金属板材..图 2-11 为肩关节联接金属板材机械加工工程图:图2-10 肩关节联接金属板2.5.3 抓手的设计一款通用型的机械臂应该具有抓取多种物体的能力;也为某一目标物体专门设计一款抓手;因而在设计机械臂臂体与机械抓手时;需要设计一个合理的联接结构;以便机械抓手能够快速更换..机械抓手在抓取物体时需要保持一定的夹持力;本文将使用舵机为机械手爪提供动力;舵机在旋转到位后能持续提供一定的扭矩以保持夹持状态..使用舵机型号为 TowerPro MG945 全金属齿舵机;表2-5舵机型号及相关参数图2-12 为和机械抓手配合的臂体联接结构..同理只要末端执行器设计为可与该联接结构配合;即可实现更换;以完成对不同物体的抓取任务..图2-11 机械臂执行器联接结构3机械臂软件系统设计整个机械臂控制系统软件包括主计算机监控软件和各关节控制器软件..主计算机接收目标位姿数据;完成路径规划算法..另外;主计算机要实时读取关节控制器的反馈数据;记录机械臂的当前位姿;并显示在屏幕上..不仅直线运动、点到点运动、复位动作的完成需要主计算机监控软件协调;而且像各关节绝对位置的确定过程、各关节运动范围是否越界也必须由主计算机实时参与;及时做出决策..主计算机还要提供给用户友好的人机交互界面;方便于用户输入各种命令;存储设置好的参数;允许数据以表格或者曲线等形式导出..3.1 关节控制器软件设计3.1.1 PID控制算法关节控制器TMS320LF2407来实现;完成电机的位置环控制和速度环控制;如图3-1所示..位置环的控制周期设为2ms;速度环的控制周期也设为2ms..由于采用了速度环;系统的动态性性能可以得到显着提高..两个闭环都采用积分分离PD控制;根据实际调试情况;可以对控制律进行适当的化简..零位霍尔接近开关在系统上电时用于较粗略的确定电机的绝对位置;再结合增量编码器的Z通道的信号;就可以较精确的确定出电机的绝对位置..主计算机路径规划求得的目标位置;应该换算成增量码盘的脉冲数后;再发给关节控制器..关节控制器利用它和从增量编码器实际测得的脉冲数进行比较;利用积分分离PID算法求解位置环的控制量..3.1.2 关节控制器程序流程主程序的流程图如3-2所示:图3-1 主程序流程图寄存器初始化操作主要包括:设置CPUCLK为外部晶振的2倍频;即16MHZ;设置串口通讯波特率为:38.4kbPs;设置定时器/计数器相关寄存器;设置QEP 电路单元相关寄存器;设置中断控制寄存器等等..串口数据接收中断服务程序流程图如3-3所示..在中断服务程序中;读取数据接收寄存器中的数据;存入数据接收区;而并不作任何进一步分析和处理..数据接收区是内存中暂时存放数据的区域;当存满一条完整指令信息后;由主程序分析和处理..图 3-2 串口数据接收中断服务程序流程图控制周期2ms定时中断服务程序的流程见图3-4..定时器/计数器3为位置环和速度环控制周期定时2ms;每3ms进入定时中断服务程序一次;读取位置反馈值和速度反馈值;进行积分分离PID运算;最后输出给DA转换成模拟量..每一个插补周期50ms;主计算机向关节控制器发送一次运动规划后的目标位置..该目标位置是以增量编码器信号四倍频后的脉冲数为单位;以前一次的目标位置作为脉冲计数的零点;因此;关节控制器在读取新的目标位置后;也应该以前一次的目标位置作为新的增量码盘脉冲计数零点;测量实际的电机位置;与新的目标位置比较、运算..主计算机根据需要可以查询当前电机运行的实际位置;关节控制器返回的位置则是关节角的绝对位置;单位是0.1度..图3-3 控制周期定时中断服务服务程序流程图4 结束语本文提出了一套机械臂结构方案..硬件上;对机械臂的构型、臂杆长度、电机、驱动器、减速器、传感器和主控制器进行了选型..并且对机械臂进行了模块化设计;其中包括旋转关节的设计、连接件的设计和抓手的设计..软件方面设计了DSP关节控制器;实现了电机位置和速度闭环控制..基于RS485总线和DSP 的分布式控制体系结构;具有高速、稳定、可靠、易于维护等优点;适合于六自由度机械臂的实时控制..5 参考文献1 王罗罗. 机械臂的结构设计及控制研究D. 哈尔滨工业大学; 2009.2 招绍坤. 轻型机械臂模块化设计与运动控制的研究 D. 哈尔滨工业大学; 2010.3 王再明. 轻型臂电控系统的研究D. 哈尔滨工业大学; 2007.4 方红根;杨军. 基于模块化关节轻型机械臂的研制J. 上海电气技术; 2011.5 濮良贵. 机械设计M. 北京:高等教育出版社;2012:186-273.6 李世其; 刘洋; 朱文革 ;刘燕; 贾阳. 多关节轻型机械臂的设计研究J. 航天器工程; 2009.7 刘宝志. 步进电机的精确控制方法研究D. 山东大学; 2010.8 雷凯. 步进电机细分驱动技术的研究D. 苏州大学; 2003.。
机械设计中的机械手臂设计
机械设计中的机械手臂设计机械手臂是一种由多个关节连接而成的机械结构,具有类似人臂的灵活度和自主操作能力。
在机械设计领域中,机械手臂的设计是一项重要的任务,对于提升生产效率和实现自动化生产具有至关重要的作用。
本文将就机械设计中的机械手臂设计进行探讨和分析。
一、机械手臂的基本组成机械手臂一般由五个主要组成部分构成,包括机械结构、驱动系统、传感器、控制系统和终端执行器。
机械结构是机械手臂的主体部分,决定了机械手臂的运动能力和灵活度,其设计需要考虑到机械手臂的工作范围、负载能力和运动速度等因素。
驱动系统是机械手臂实现运动的关键部件,通常包括电机、减速器和传动装置等。
传感器用于感知环境中的信息,如力、力矩、位置和姿态等。
控制系统用于控制机械手臂的运动和操作,通常由计算机和控制算法组成。
终端执行器是机械手臂的工作部分,根据具体应用可以为夹具、吸盘或者工具等。
二、机械手臂的运动学分析机械手臂的运动学分析是机械设计中的重要环节之一,通过对机械手臂的位姿和轨迹进行描述,确定机械手臂的关节角度和终端位置。
在机械手臂的运动学分析中,通常会采用数学方法和仿真工具进行分析和求解。
数学方法包括解析法和数值法两种,解析法适用于简单的机械手臂结构,可以通过几何关系和三角函数等确定机械手臂的位姿和轨迹;数值法适用于复杂的机械手臂结构,通过数值计算和迭代求解,得到机械手臂的关节角度和终端位置。
仿真工具包括MATLAB、SolidWorks和ADAMS等,通过建立机械手臂的数学模型,进行仿真和优化,得到机械手臂的运动学性能和工作空间等参数。
三、机械手臂的动力学分析机械手臂的动力学分析是机械设计中的关键环节之一,通过对机械手臂的加速度、力矩和惯性等进行分析,确定机械手臂的运动特性和工作能力。
在机械手臂的动力学分析中,需要考虑到机械手臂的惯性、摩擦、重力和外部载荷等因素。
通过建立机械手臂的动力学模型,可以求解机械手臂的加速度和力矩,进而评估机械手臂的运动性能和负载能力。
三关节机械臂设计
三关节机械臂设计首先,我们需要对三关节机械臂的结构进行设计。
通常,三关节机械臂由底座、第一臂、第二臂和末端执行器组成。
每个关节由电机驱动,可以分别实现关节的旋转运动。
底座是机械臂的基础支撑,第一臂与底座连接并负责垂直方向的运动,第二臂与第一臂相连并负责水平方向的运动,最后的末端执行器通过第二臂连接,用于具体的任务操作。
接下来,我们需要进行三关节机械臂的动力学分析。
在机械臂运动过程中,需要考虑各个关节的速度、加速度和力矩等参数。
通过对机械臂的分析,可以确定合适的电机参数和机械结构参数。
同时,还需要考虑机械臂的负载能力和运动精度等因素,确保机械臂在工作过程中的稳定性和精确性。
最后,针对三关节机械臂的控制策略进行设计。
机械臂的控制通常包括位置控制和力控制两种方式。
对于位置控制,可以利用逆运动学方法将末端目标位置转换为各个关节的角度值,并通过控制单元对电机进行控制,实现机械臂的位置调节。
对于力控制,可以通过对机械臂的力矩分析,设计合适的控制算法,实现机械臂对外界力的响应和力的调节。
在实际应用中,三关节机械臂有着广泛的应用。
例如,在工业生产中,可以利用机械臂完成装配、搬运和焊接等工作;在医疗领域,可以应用于手术机器人和康复机器人等设备;在军事领域,可以用于无人遥控机器人等。
因此,对于三关节机械臂的设计和优化具有重要的研究意义和实际应用价值。
综上所述,本文对三关节机械臂的设计进行了详细的探讨,包括结构设计、动力学分析和控制策略等方面。
通过对机械臂的设计和优化,可以实现机械臂在三维空间内的灵活操作,满足不同领域的应用需求。
三关节机械臂设计
三关节机械臂设计机械结构设计是三关节机械臂设计的基础,主要包括机械臂的主体结构和关节结构的设计。
机械臂的主体结构通常采用刚性材料,如铝合金或钢材,以确保机械臂能够承受较大的负荷和惯性力。
关节结构的设计通常采用轴承或滑动副,以确保关节能够顺畅地运动,同时也要考虑到对关节的驱动力矩要求。
电控系统设计是使机械臂能够准确、稳定地执行指令的关键。
电控系统主要包括电机驱动器、传感器和控制器。
电机驱动器用于控制关节的运动,其中包括电机控制器和功率放大器。
传感器用于检测机械臂的位置和姿态,常用的传感器包括编码器、惯性传感器和力传感器。
控制器是电控系统的核心,通过读取传感器数据和计算控制命令来控制机械臂的运动,通常采用微处理器或单片机作为控制器。
运动学分析是研究机械臂在空间中的运动规律的重要一环。
通过运动学分析,可以确定机械臂运动时的关节角度和末端执行器的位置和姿态。
常用的运动学分析方法包括正运动学和逆运动学。
正运动学用于计算机械臂末端执行器在给定关节角度下的位置和姿态,逆运动学用于计算给定目标位置和姿态下,机械臂各个关节的角度。
控制算法设计是实现机械臂自动控制的关键。
控制算法主要根据机械臂的运动学模型和控制需求来设计。
常用的控制算法包括PID控制、模糊控制和神经网络控制等。
PID控制是一种传统的控制算法,通过调节比例、积分和微分参数来控制机械臂的运动。
模糊控制是一种基于模糊逻辑的控制算法,通过建立模糊规则来实现对机械臂的控制。
神经网络控制利用人工神经网络来建立机械臂的控制模型,实现对机械臂的精确控制。
总之,三关节机械臂设计涉及机械结构设计、电控系统设计、运动学分析和控制算法设计等多个方面,需要综合考虑机械臂的负荷、运动范围和控制需求等因素,以实现机械臂的准确、稳定和高效运动。
三自由度机械臂毕业设计

三自由度机械臂毕业设计三自由度机械臂是机器人领域中常见的一种机械结构,它通常由三根旋转自由度的关节组成,能够在三维空间内完成灵活的运动和操作。
毕业设计是大学生在毕业前完成的重要学术项目,通过设计、研究和实践,提升学生的综合能力和创新意识。
本文将结合三自由度机械臂的特点,探讨其毕业设计的内容和要点,帮助读者更好地完成相关的学术项目。
一、研究背景与意义三自由度机械臂是工业自动化和机器人领域的核心组成部分,具有重要的应用价值和研究意义。
其在装配作业、物料搬运、焊接加工等方面有着广泛的应用,可以提高生产效率、降低生产成本、改善工作环境等。
对三自由度机械臂的设计、控制、优化等方面的研究具有重要的理论和实际意义。
二、毕业设计的内容和要点1. 三自由度机械臂的结构设计毕业设计的第一要点是对三自由度机械臂的结构进行设计。
包括机械臂的关节形式、长度比例、连接方式等方面的设计,需要考虑机械结构的稳定性、承载能力、运动灵活性等因素,确保机械臂能够满足特定的工作要求。
2. 机械臂运动学分析与建模运动学分析是机械臂设计的重要环节,通过对机械臂的结构和运动特性进行分析,建立数学模型描述机械臂的运动规律。
还需要进行正解和逆解的研究,分析机械臂末端执行器的位置和姿态与关节变量之间的关系,为后续的控制设计奠定基础。
3. 机械臂运动控制系统设计毕业设计的另一个重要内容是机械臂的运动控制系统设计。
包括运动控制算法的选择、控制器硬件的选型、传感器系统的构建等方面,需要考虑控制精度、动态响应性能、抗干扰能力等指标,并将其应用到具体的机械臂应用场景中。
4. 机械臂的性能测试与分析毕业设计的最后一个要点是对设计的三自由度机械臂进行性能测试与分析。
通过实验验证机械臂的运动性能、控制精度以及系统的稳定性,进而对设计方案进行总结和改进,为未来的实际应用提供参考依据。
三、结语三自由度机械臂毕业设计旨在培养学生的实际动手能力和工程实践能力,通过对机械臂设计、控制的研究,提升学生的科研能力和工程实践水平。
三自由度机械臂毕业设计
三自由度机械臂毕业设计毕业设计题目:三自由度机械臂设计与控制一、设计背景三自由度机械臂是工业机器人中常见的一种结构,通常由三个关节驱动器构成,可以实现在三个方向上的运动。
该设计旨在研究三自由度机械臂的结构设计和控制算法,提高其运动精度和稳定性,以满足工业生产中对机器人精准操作的需求。
二、设计内容1.机械结构设计:根据机械臂的工作范围和负载要求,设计合适的机械结构,包括三个关节的连杆长度、角度范围等,确保机械臂能够在工作空间内自由灵活地运动,并能承受所需的负载。
2.关节驱动器选择:选择合适的关节驱动器,比如伺服电机、步进电机等,确保驱动器能够提供足够的转矩和精确的控制,以实现机械臂的精准运动。
3.控制系统设计:设计相应的控制系统,包括运动规划、轨迹跟踪、碰撞检测等算法,实现机械臂在各种工作场景下的自动化操作。
同时,考虑到三自由度机械臂的运动学模型,设计合理的控制策略,提高机械臂的运动精度和稳定性。
4.系统集成和调试:将机械结构、关节驱动器和控制系统进行集成,通过实验验证机械臂的性能和稳定性,调试控制算法,不断优化设计方案,使机械臂达到预期的工作效果。
三、设计目标1.实现三自由度机械臂在三维空间内的高精度运动,能够完成各种复杂的工作任务。
2.提高机械臂的运动速度和稳定性,减少运动过程中的振动和误差,提高工作效率。
3.实现机械臂与外部环境的智能交互,通过传感器实时监测工作环境,避免碰撞和危险情况的发生。
4.设计简洁高效的控制系统,具有良好的实时性和可靠性,便于操作和维护。
四、预期成果通过以上设计内容和目标,预期能够完成一台具有高精度运动和稳定性的三自由度机械臂原型机,并实现其在工业生产中的应用。
同时,可以得到相关的技术研究成果,为工业机器人领域的发展贡献一份力量。
五、结语三自由度机械臂的设计与控制是一个具有挑战性和重要性的课题,需要多方面的知识和技能综合运用。
希望通过本次毕业设计,能够全面学习和掌握机械臂设计与控制的相关知识,提升自己在工程领域的实践能力和创新能力,为未来的科研和工作打下坚实的基础。
机械臂设计制作报告范本
机械臂设计制作报告范本1.引言1.1 概述概述部分:机械臂是一种用于执行各种任务的自动化装置,其设计和制作不仅需要考虑到力学结构和控制系统的设计,还需要考虑到适用于不同场景和任务的灵活性和可靠性。
本报告将介绍机械臂的设计和制作过程,从设计需求到最终的制作过程,通过详细的介绍和分析,展现出一个完整的设计制作过程,以期能够对机械臂设计和制作感兴趣的读者有所帮助。
1.2文章结构文章结构部分内容如下:文章结构部分旨在介绍本文的整体结构和各个部分的内容安排。
本报告共分为引言、正文和结论三个部分。
在引言部分,将对机械臂设计制作的概述进行说明,同时介绍文章的结构和目的。
接着,正文部分将详细阐述设计需求、设计方案和制作过程,包括各个环节的具体细节和步骤。
最后,在结论部分,将对本次机械臂设计制作的成果和经验进行总结,并展望未来可能的发展方向和改进空间。
整个文章结构清晰明了,内容丰富全面,希望能够为读者提供有益的参考和指导。
1.3 目的本报告的目的是对机械臂的设计与制作过程进行系统性的总结和归纳,为未来的机械臂设计与制作提供参考和借鉴。
通过对设计需求、设计方案、制作过程的详细描述和分析,希望能够总结出一套科学、实用的设计制作方法,为机械臂的研究与应用提供可行性的参考,促进机械臂领域的进步与发展。
同时,通过对成果总结、经验总结和展望未来的讨论,可以为相关领域的研究人员提供借鉴和启示,促进行业内的交流和合作,推动机械臂技术的不断创新和提升。
2.正文2.1 设计需求设计需求部分的内容应该包括对机械臂的任务需求和技术需求的详细描述。
任务需求包括机械臂需要完成的具体任务,比如物料搬运、装配操作等;技术需求包括对机械臂的性能参数和技术指标的要求,比如工作载荷、工作范围、精度等。
同时还需要考虑设计需求的实际应用场景和环境,比如是否需要防尘防水功能,是否需要考虑安全性等方面的需求。
在设计需求部分还应该详细说明机械臂的使用对象和使用场景,为后续的设计方案和制作过程提供清晰的指导。
关节型机器人腕部结构设计(全套,CAD有图)

1前言1.1机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。
可分固定式和移动式两类。
1.1.2驱动单元它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。
1.1.3控制装置它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。
1.1.4人工智能系统它由两部分组成,一部分是感觉系统,另一部分为决策-规划智能系统。
机器人技术实训机械臂的制作

机器人技术实训——机械臂的制作
目录
设计思路
设计思路 1. 本次机械臂采用三个舵机控制,分别控制机械臂的三个关节。每个舵机的位置由 Arduino控制,通过PWM信号控制舵机的角度,从而控制机械臂的运动 2. 机械臂的设计采用三个关节,分别为基座、肘部和手部,每个关节的运动范围由舵机 的角度范围决定。根据机械臂的设计和舵机的规格参数,计算出舵机的初始角度和运动范 围,并编写相应的控制代码。可以使用Arduino的Servo库来控制舵机的运动,也可以手动 编写PWM信号控制舵机的角度。3 3. 编写Arduino程序。根据机械臂的设计和电路连接,编写Arduino程序,实现机械臂的 动作控制和传感器反馈。可以使用Arduino的PWM输出控制电机的速度和方向,使用传感器 实现机械臂的自动化控制和反馈 机械臂的设计和编写程序需要具备一定的机械设计和电路设计能力,同时需要掌握 Arduino编程和基本的电子知识。在制作过程中,要注意安全,避免电路短路和机械部件 的损坏
NEXT
-
Thank You
感谢你的观看
XXXXXX
THANK YOU
三轴机械臂机械结构

三轴机械臂机械结构
第一个关节是基座关节,它连接着机械臂和工作台。
基座关节通常是固定的,不会移动,它提供了机械臂的稳定支撑。
第二个关节是臂关节,它连接着基座关节和第三个关节。
臂关节通常具有较大的运动范围,可以水平和垂直方向上旋转。
这使得机械臂能够在三个维度上进行移动和定位。
第三个关节是手腕关节,它连接着臂关节和工具终端。
手腕关节通常具有较小的运动范围,但是可以实现更具精确的运动和定位。
工具终端可以根据具体的应用需求来选择,例如夹具、吸盘等。
三轴机械臂的机械结构设计必须考虑到多个因素,包括强度、刚度和精度。
由于机械臂需要承受较大的负荷并进行高速运动,所以机械结构必须具有足够的强度。
另外,机械臂在完成任务时需要保持稳定,所以机械结构还必须具有足够的刚度。
此外,机械臂还需要具有较高的精度,以实现精确的定位和操作。
为了满足这些要求,三轴机械臂的机械结构通常由坚固的金属材料构成,如铝合金或钢材。
这些材料具有较高的强度和刚度,可以承受较大的负荷并提供稳定的支撑。
此外,机械臂的驱动系统也是机械结构的重要组成部分。
驱动系统通常由电动机、减速器和编码器组成。
电动机提供动力,减速器用于减速和增加扭矩,编码器用于测量关节的位置和速度。
总之,三轴机械臂的机械结构是一种灵活、多功能且高性能的设计。
它可以用于许多工业应用,如装配线、仓储和物流等。
随着技术的不断进步,机械臂的机械结构将不断优化和改进,以满足不断变化的需求。
三自由度机械臂设计

三自由度机械臂设计1. 引言机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业自动化、医疗手术、空间探索等领域。
本文将介绍三自由度机械臂的设计原理、结构和控制方法。
2. 三自由度机械臂的定义三自由度机械臂是指具有三个独立运动自由度的机械臂。
它通常由底座、臂1、臂2和末端执行器组成。
臂1和臂2之间通过转动关节连接,末端执行器可以在三维空间内执行各种任务。
3. 三自由度机械臂的结构三自由度机械臂的结构通常采用串联结构,即每个关节依次连接在一起。
关节通常采用旋转关节或者滑动关节,以实现臂的运动。
三自由度机械臂的底座是固定不动的,通过第一个关节与臂1连接。
臂1和臂2之间通过第二个关节连接,第二个关节使得臂2能够绕臂1旋转。
第三个关节连接在臂2的末端,用于连接末端执行器。
4. 三自由度机械臂的运动学分析三自由度机械臂的运动学分析是研究机械臂末端位置和姿态的方法。
通过运动学分析,可以确定机械臂各关节的运动范围和工作空间。
三自由度机械臂的运动学方程可以通过解析方法或者数值方法求解。
解析方法通常基于几何关系和三角函数的运算,可以得到精确的解析解。
数值方法通常通过迭代计算,可以得到近似解。
5. 三自由度机械臂的动力学分析三自由度机械臂的动力学分析是研究机械臂受力和运动响应的方法。
通过动力学分析,可以确定机械臂的运动惯性、关节力矩和末端执行器的力矩。
三自由度机械臂的动力学方程可以通过拉格朗日方程或牛顿-欧拉方程求解。
这些方程描述了机械臂的运动学和动力学关系,可以用于控制机械臂的运动。
6. 三自由度机械臂的控制方法三自由度机械臂的控制方法包括位置控制、速度控制和力控制。
位置控制是控制机械臂末端位置的方法,速度控制是控制机械臂关节速度的方法,力控制是控制机械臂末端力的方法。
位置控制通常采用PID控制器或者模糊控制器。
PID控制器通过比较实际位置和期望位置的差异,调整关节角度以使机械臂末端达到期望位置。
模糊控制器通过模糊逻辑和规则库,根据实际位置和期望位置的差异调整关节角度。
多自由度机械臂的设计以及运动仿真
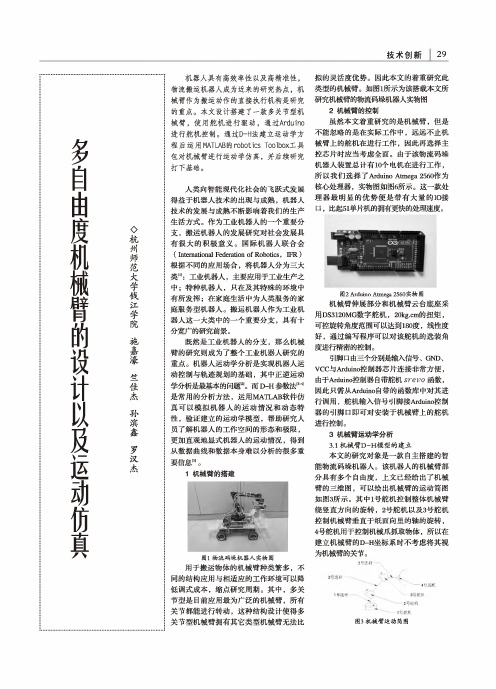
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
多自由度关节式机械手的结构设计
目录1前言 (1)1.1 设计题目的背景及目的 (1)1.2 概述 (1)1.3. 机械手发展简史 (2)1.5 机械手应用概况 (3)1.6 发展趋势 (4)2 工业机械手设计概述 (5)2.1机械手设计目的及意义 (5)2.2 本次机械手的设计内容 (5)3 设计要求及方案论证 (6)4总体设计及分析 (8)4.1 系统原理介绍 (8)4.2 系统结构论述 (9)4.2.1机械手结构设计的特点 (10)5机械手各部分设计及计算 (10)5.1驱动系统的选择 (10)5.2 机械手基座部分设计 (12)5.2.1机械手基座结构的设计原则 (12)5.2.2 基座部分的设计计算 (13)5.2.3计算传动装置的运动和动力参数 (16)5.2.4主要传动尺寸的确定 (16)5.3 机械手手臂部分设计及计算 (23)5.3.1机械手手臂结构设计的原则: (23)5.3.2机械手手腕部分设计及其计算 (32)6 直接示教轻动化设计 (36)7 总结 (37)参考文献 (38)谢辞 (39)1前言1.1 设计题目的背景及目的机器人是近30年来发展起来的一种高科技自动化生产设备。
机械手是机器人的一个重要分支。
它的特点是可通过变成完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境完成作业的能力。
本设计完成了多自由度关节式机械手的运动方案设计和驱动方式选择,并对机座,手臂及末端执行器等机械装置进行了结构设计。
本次设计的内容是多自由度关节式机械手的结构设计,属于工业机械手机械部分设计,本次设计的机械手属于专业机械手,主要附属于某一主机,如自动机床或生产线上,用以解决机床的上下料及工件的传输等任务,动作比较单一,只能完成某些特定的任务。
1.2 概述机器人是一种人类很早就梦想制造的、具有仿生性且处处听命于人的自动化机器,它可以帮助人类完成很多危险、繁重、重复的体力劳动或者进入各种服务领域。
三自由度搬运机械手机构设计
三自由度搬运机械手机构设计搬运机械手机构设计-三自由度机械手臂一、引言随着科技的发展,机器人在工业生产、物流等领域发挥着越来越重要的作用。
机械手臂作为机器人的重要组成部分,具有广泛的应用前景。
本文将介绍一种三自由度搬运机械手机构的设计。
二、设计目标本设计的目标是设计一种具备三个自由度的搬运机械手臂,能够实现灵活的运动,达到高效搬运的目的。
具体要求如下:1.三自由度:机械手臂具备三个关节,分别可以实现水平旋转、垂直旋转和前后伸缩的运动。
2.高承载能力:机械手臂需要具备足够的承载能力,能够稳定搬运重物。
3.灵活性:机械手臂需要具备足够的灵活性,能够适应不同的工作环境和搬运任务。
4.可控性:机械手臂需要具备良好的控制性能,能够通过外部控制实现精确的运动。
三、设计方案基于上述设计目标,我们提出以下设计方案:1.结构设计:机械手臂由三个关节组成,分别为水平旋转关节、垂直旋转关节和前后伸缩关节。
其中,水平旋转关节和垂直旋转关节采用舵机作为驱动装置,前后伸缩关节采用滑轨设计。
这种结构设计既能满足机械手臂的运动需求,又能够实现紧凑的机械结构。
2.材料选择:机械手臂的主要材料选择应考虑强度和重量的平衡。
我们可以采用铝合金作为机械手臂的主要材料,既能够满足强度要求,又能够降低自身的重量。
3.控制系统设计:机械手臂的控制系统应具备良好的控制性能,能够通过外部控制实现精确的运动。
我们可以采用嵌入式控制系统,通过编程控制机械手臂的运动,并且可以与其他设备进行数据交互,实现智能化的控制。
4.承载能力设计:机械手臂的承载能力需要根据实际应用需求进行设计。
我们可以根据机械手臂的结构和材料选择,进行力学分析和仿真,来确定机械手臂的承载能力。
四、设计步骤1.结构设计:设计机械手臂的结构,确定关节类型和数量,并确定机械手臂的整体尺寸。
2.材料选择:根据机械手臂的要求和预算限制,选择合适的材料,并确定机械手臂的材料规格。
3.控制系统设计:根据机械手臂的运动要求,设计控制系统的硬件和软件部分,并确定控制系统的接口和通信方式。
三自由度机械臂毕业设计

三自由度机械臂毕业设计
三自由度机械臂是一种用于完成复杂任务的机械装置。
其由三个关节连接的三段杆件组成,每个关节可实现旋转或者转动,使得机械臂能够在三轴上作运动。
三自由度机械臂的毕业设计可以从以下几个方面展开:
1. 控制算法设计:设计一个合适的控制算法,通过传感器获取机械臂的位置和姿态信息,并根据任务需求控制各个关节的运动,实现机械臂的精确控制。
2. 机械结构设计:根据机械臂的工作环境和任务要求,设计机械臂的结构和关节连接方式,使得机械臂能够承受工作负荷并保持稳定运行。
3. 运动规划:设计一个合适的运动规划算法,根据任务需求生成机械臂的轨迹,使得机械臂能够以最短路径或者最小能量消耗完成任务。
4. 通信和控制界面设计:设计一个用户友好的控制界面,通过与用户的交互实现机械臂的远程控制和监控。
5. 实验验证和性能评估:根据设计要求,制作样机并进行实际测试,验证设计的合理性和性能指标,并进行性能评估和分析。
以上是一些可能的设计方向,根据自己的兴趣和实际情况选择适合自己的方向进行深入研究。
希望对你的毕业设计有所帮助。
三自由度机械臂 几何解法

三自由度机械臂几何解法三自由度机械臂是一种具有三个旋转自由度的机械系统。
它由三个旋转关节连接的一系列刚性杆件组成。
在操作中,机械臂可以通过控制每个关节的角度来完成各种任务,如抓取、搬运、装配等。
几何解法是一种通过关节角度和机械结构参数来推导出机械臂末端位置和姿态的方法。
几何解法通常基于欧拉角、旋转矩阵或四元数等数学模型,通过运用正逆运动学的方法来实现。
在三自由度机械臂中,每个关节的旋转可以由一个角度表示。
假设第一个关节的旋转角度为θ1,第二个关节的旋转角度为θ2,第三个关节的旋转角度为θ3。
为了计算机械臂末端的位置和姿态,我们首先需要定义机械臂的坐标系。
在三自由度机械臂中,一般采用笛卡尔坐标系。
我们假设机械臂的基座位于坐标系的原点O,三个关节的旋转轴分别为x、y和z轴。
末端执行器的位置用(x,y,z)来表示,姿态可以用旋转矩阵或欧拉角来表示。
首先,我们需要计算第一个关节的转动矩阵。
转动矩阵表示一个坐标系相对于另一个坐标系的旋转关系。
假设第一个关节的旋转轴为z 轴,转动角度为θ1,则第一个关节的转动矩阵可以表示为:R1 = [cos(θ1), -sin(θ1), 0;sin(θ1), cos(θ1), 0;0, 0, 1]接下来,我们需要计算第二个关节的转动矩阵。
假设第二个关节相对于第一个关节的旋转轴为y轴,转动角度为θ2,则第二个关节的转动矩阵可以表示为:R2 = [ cos(θ2), 0, sin(θ2);0, 1, 0;-sin(θ2), 0, cos(θ2)]最后,我们需要计算第三个关节的转动矩阵。
假设第三个关节相对于第二个关节的旋转轴为y轴,转动角度为θ3,则第三个关节的转动矩阵可以表示为:R3 = [ cos(θ3), 0, sin(θ3);0, 1, 0;-sin(θ3), 0, cos(θ3)]通过将这三个转动矩阵依次相乘,我们可以得到机械臂的整体转动矩阵R。
即:R = R1 * R2 * R3接下来,我们需要计算机械臂的位移矩阵D。
多关节通用机械臂设计
摘要摘要随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。
因此对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。
本文作者在搜集了国内外机器人相关资料的基础上,选择了国内外各生产厂商的机械臂作为参考,设计了一款拥有5个自由度的机械臂。
该机械臂由多个系统组成,包括机电系统,液压系统和传动系统。
本人绘制了机械臂的相关原理图和零件图。
本机械臂的特点是传动简单,维护方便,可用于工业生产当中各种物件的搬运,用途广泛。
关键词工业机器人;多关节机械臂;5自由度;液压系统燕山大学本科生毕业设计(论文)AbstractWith the development of modern science and technology, robot technology has become more and more attention, in today's increasingly modernized industrial production, the use of robots is becoming more and more popular. So for the robot technology research has become more and more urgent, especially for industrial robots. Robot at home and abroad in this article the author collected the relevant data, on the basis of domestic and foreign various manufacturers of mechanical arm as the reference, design a model with five degrees of freedom mechanical arm. The mechanical arm is composed of several systems, including mechanical and electrical system, hydraulic system and transmission system. I draw the related principle of mechanical arm and part drawing. Transmission characteristics of this manipulator is simple, maintenance is convenient, can be used in the industrial production of a variety of objects carrying, wide range of uses.Keywords industrial robot;Multi-joint robotic arm;5 degrees of freedom;The hydraulic system目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.1.1机械臂的发展 (3)1.1.2 国内外机器人研究现状 (5)1.1.3机械臂技术的要素 (7)1.1.4研究主要成果 (8)1.1.5发展趋势 (10)1.1.6 工业机器人研究意义 (10)1.2本章小结 (11)第2章机械臂总体方案设计 (12)2.1机器人机械设计的特点 (12)2.1.1 与机器人有关的概念 (13)2.1.2机器人学的基本术语 (15)2.1.3机器人的规格 (15)2.1.4机器人的分类 (16)2.2设计方案 (17)2.2.1方案要求 (17)2.2.2方案的功能设计与分析 (18)2.3本章小结 (19)第3章机械臂总体结构设计 (20)3.1腰部回转总体结构设计 (20)3.2大臂回转结构设计 (21)3.3小臂回转机构设计 (22)3.4大臂及其内部总体结构的布局 (22)3.5本章小结 (23)第4章机械臂液压缸尺寸设计 (24)4.1回转缸尺寸设计与校核 (24)4.1.1回转缸转动时所需的驱动力矩 (24)4.1.2回转缸的尺寸及其校核 (25)4.2伸缩缸设计 (27)4.2.1导向装置 (27)4.2.2伸缩缸的尺寸设计及校核 (27)4.3本章小结 (28)结论 (29)参考文献 (30)致谢 (31)附录1开题报告 (32)附录2文献综述 (38)附录3外文翻译 (44)第1章绪论1.1 课题背景工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。
三自由度机械手设计

三自由度机械手设计机械手是一种用于代替人手完成各种复杂或危险操作的机械装置。
三自由度机械手是指具有三个独立自由度的机械手。
在机械手设计中,三自由度机械手是较为简单且常见的一种类型。
三自由度机械手通常由机械臂和手爪组成,其中机械臂负责定位和移动,手爪负责抓取和放置物体。
机械臂由三个关节连接起来,每个关节都可以独立控制。
这意味着机械臂可以在三个轴上进行旋转和伸缩,从而实现空间中的定位和移动。
1.功能需求:首先需要明确机械手的功能需求,例如需要抓取什么类型的物体以及进行什么样的操作。
不同的功能需求会对机械手的结构和控制系统产生影响。
2.结构设计:机械手的结构设计包括关节、连接杆和运动范围等方面。
关节可以使用电机或气动缸等驱动装置实现,连接杆需要具有足够的强度和刚性。
运动范围的设计需要考虑机械手需要移动到的位置和空间,以及机械手的工作环境。
3.控制系统设计:机械手的控制系统包括传感器、运动控制器和驱动装置等。
传感器用于获取机械手当前的位置和姿态信息,运动控制器用于计算并控制机械手的运动轨迹,驱动装置用于实际驱动机械手的运动。
4.安全性设计:机械手操作时需要考虑其安全性。
例如,在操作过程中需要设置足够的安全间距,以避免机械手发生碰撞。
此外,机械手还可以通过使用力传感器和视觉系统等技术,实现对工作环境和物体的感知和识别,以提高操作的安全性和精确性。
在实际应用中,三自由度机械手广泛用于工业生产线上的自动化操作。
它可以完成物体的抓取、搬运、装配等任务,提高生产效率和质量。
同时,由于其结构相对简单,成本相对较低,因此也被广泛应用于教育和研究领域。
总而言之,三自由度机械手是一种常见的机械手类型,在设计中需要考虑功能需求、结构设计、控制系统设计和安全性设计等方面。
它在提高生产效率和质量方面具有重要的应用价值,并且具有较低的成本,因此在工业、教育和研究等领域广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南京工业大学学士学位论文三关节机械臂及其控制系统设计摘要随着科技的不断进步,机械臂特别是仿人型机械臂的发展非常迅速。
其在人们的日常生活,生产中开始扮演着不可或缺的角色。
本文呈现的是一种仿人型机械臂,其主要特点在与多样化,简单化,直觉化的人机交互方式。
将以往复杂的主从式操作,诸如摇杆控制等,转化为简单的触摸屏操作,同时辅佐以双目机器视觉,还可以实现通过人的手势来控制机械臂动作,实现了直觉化的控制。
为了能高效稳定地控制机械臂,本设计使用了双控制系统协同作业:下位控制系统使用嵌入式系统—ARM 微处理器(S3C2440 芯片)—实现机械臂的基本动作的控制封装,包括定位算法以及运动控制等;上位控制系统是在PC 上实现的,控制软件使用VC++ 6.0 编写,主要实现机器视觉的相关运算,并将运算结果通过串口通信,传递给下位系统—ARM 微处理器,并最终转换成机械臂的动作。
整个设计过程包含了底层的驱动硬件设计:舵机的选型与控制;机械结构设计:结构设计,负载校核;控制系统电路设计;上位,下位软件的编写:舵机的控制方式—PWM 脉宽调制,点定位算法,轨迹控制算法,机器视觉算法;还编写了3 维软件进行仿真:三维的投影算法,及贴面,光照,面的排序算法;并最终制作成实物进行演示,在末端装上笔之后,能够进行简单的书写。
关键字:触摸屏机器视觉嵌入式系统运动控制AbstractThree joint mechanical arm and its control system designAbstractAs technology advances, mechanical arm especially humanoid type of mechanical arm is developing fast. This paper presents a humanoid type of mechanical arm.Its main characteristics is multiple ,simple, intuitive man-machine interactive way.Touch screen control and machine version are introduced covering for complex operation ,such as joystick control. Mechanical arm is control by daily gestures which makes it much easier to use a mechanical arm.In order to control the mechanical arm stabily, this design uses the dual control system under coordinated assignments: one control system uses embedded system – ARM microprocessor (S3C2440 chip) - realizing the basic mechanical arm movement control encapsulation, including localization algorithm and motion control, etc.;Upper control system is on the PC platform, using vc + + 6.0 for software, realizing machine vision calculation, and will transmit results through serial communication, to lower level system -the ARM microprocessor, leading to mechanical arm movementsThe whole design process contains rock-bottom drive hardware design: steering gear selection and control; Mechanica l structure design structure design, load checking; Control system circuit design; Superior position software: steering gear -- PWM pulse width modulation, point positioning algorithm, trajectory control algorithm, machine vision algorithms; And finally make physical for demonstration realizing writing with pen loaded.Key words: Touch screen;Machine version;embedded systems南京工业大学学士学位论文目录摘要 (Ⅰ)Abstract (Ⅱ)第 1 章绪论 (1)1.1题目提出的意义 (1)1.2国内外发展现状 (1)第 2 章方案的确定与比较分析 (4)2.1机械手机械系统的比较与选择 (5)2.2机械手驱动系统的比较与选择 (7)第 3 章电机的选择与设计计算 (10)3.1主要技术参数的确定 (10)3.2各关节电机的选择计算 (10)3.2.1大臂旋转电机的选择......................................113.2.2小臂旋转电机的选择......................................123.2.3腰部旋转电机的选择......................................13第 4 章机械部件的设计与校核 (15)4.1轴的设计与校核 (15)4.1.1大臂旋转轴的设计........................................154.1.2大臂轴的强度校核........................................154.2键的选择与强度的校核 (18)4.3轴承寿命的校核 (20)4.4联轴器的选择与圆锥销的校核 (21)4.4.1联轴器的选择............................................214.4.2联轴器圆锥销的校核......................................22目录第 5 章控制系统介绍与选择 (23)5.1单片机最小系统................................................235.1.18051 单片机介绍..........................................245.1.2复位电路................................................255.1.3振荡电路................................................265.2 串行接口电路 (27)5.3传感器 (27)5.3.1传感器的选型............................................275.3.2硬件电路的设计..........................................295.4电动机的控制 (29)5.4.1 L298N 电机驱动芯片简介...................................305.4.2硬件电路图..............................................30 结语................................................................32 参考文献33致谢........................................................35南京工业大学学士学位论文第 1 章绪论1.1题目提出的意义鉴于我国机械臂仿生技术以及控制方式较西方国家落后,目前自主研发的机械臂在使用方便性以及精度上都不尽如人意。
在市场上也很难占有一席之地。
为了打破西方国家在这一领域,特别是高端领域的垄断,让更多的国人开始关注自主研发的机械臂,对于仿人形机械臂及其控制系统的研究还是有深远意义的。
1.2国内外发展现状我国工业机器人起步于20 世纪70 年代初,大致可分为3 个阶段:70 年代的萌芽期,80 年代的开发期,90 年代的实用化期。
国外机械臂的发展已经进入了一个比较高端的地步了,各种智能机械臂,仿生机械臂层出不穷:①.美国研制的利用神经电信号控机械臂美国研制出一种利用神经传输过程中的电信号,将其作为动作输入,来以一种极为简单直接的方式来控制机械臂,是人类第一次利用大脑来控制机械臂,这种方式极大的提高了人类对于机械臂的操作性【1】。
②.德国FESTO 公司制作的仿象鼻机械臂该机械臂模仿象鼻运动原理,以三排并联的气动肌腱为硬件基础制作的机械臂。
能够进行一些复杂的动作,这是以往的关节式机械臂所望尘莫及的。
③.我国机械臂发展也十分迅速,多自由度机械臂层出不穷我国机械臂研究虽然起步较晚,但是发展速度很快,多自由度机械臂层出不穷,对于机械臂的横向研究做得还是不错的。
其中北京航空航天大学大学在机械臂及机械手的发展中作出着较大的贡献【2】。
机械手的迅速发展是由于它的积极作用正日益为人们所认识;其一、它能部分代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工作的传送和装卸;其三,它能操作必要的机具进行焊接和装配。
从而大大的改善工人的劳动条件,显著的提高劳动生产率,加快实现工业生产机械化和自动化的步伐。
因而,受到各先进工业国家的重视,投入大量的人工物力加以研究和应用。
尤其在高温、高压、粉压、噪第 1 章绪论音以及带有放射性的污染的场合,应用得更为广泛。
在我国,近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视【3】。
国外发展现状:专用机械手经过几十年的发展,如今已进入了以通用机械手为标志的时代。
机械手可以应用于更加多的场合,从而节约了不少的开发以及设计的成本。