树莓派搭建ROS Kinetic V1.6桌面版系统
1、ROS下载及安装
1、ROS下载及安装
1、ROS下载地址:/download/archive 下载对应版本的.iso⽂件
2、在VMware Workstation中---->创建新的虚拟机----> 典型---->稍后安装操作系统---->系统选择:其他(或Linux),版本:MS-DOS(或Linux内核.随便)---->选择位置,磁盘⼤⼩默认---->⾃定义硬件(添加⼀个⽹络适配器(桥接模式),内存(128M),选定iso⽂件)---->开机
3、开机后选择安装服务:按Q重启,按上下左右箭头可以移动光标,按空格进⾏确认选择与取消选择,按m是最⼩化安装,按a全部选择。
(全部安装)----->按i开始安装.
4、 Do you want to keep old configuration? [y/n]: n (是否保存⽼的配置,no)
Continue? [y/n]: y (数据将被擦出,yes)
5、安装完成,按回车重启
6、默认⽤户名:admin(⽆密码)。
教你如何安装ROS

备注:ROS 2.9.27 系列硬盘只支持IDE硬盘STAT SAS SICSI 等硬盘都不支持3X系列已上支持STAT硬盘1.第一放入光碟。
从光驱启动。
2.选择2安装ROS2.9.27。
等待30秒左右显现如下画面3.然后键盘按A 图如下4.在按键盘“I”图如下提示按Y确信,再按n不保留旧配置。
5.继续按Y不保留旧的配置6.提示是不是安装并自动格式化硬盘继续按键盘“Y”就开始安装系统了7.安装完成后提示按ENTER 回车从头启动系统从头启动系统上来输入默许账号admin密码为空会显现如以下图提示按Y观看ROS相关信息。
按N取消。
按N继续8.然后输入Internet pri 查看网卡。
看2快网卡识别到了没有。
9.上图可见。
已经成功识别到2快网卡了。
下面输入setup 进行安装。
10.然后继续按A 设置新的IP地址和网关。
11.继续按A 设定新的IP地址12.提示设置ether1网卡IP 假假想设置另外快网卡。
直接把ether1 改ether2 然后敲回车即可。
我进行第一块网卡配置。
图片如下13.提示输入新的IP地址和子网掩码。
输入内网IP地址和子网掩码。
例子内网网关伟子网掩码为那么输入14.会提示你设置网关地址。
由于内网ROS的IP确实是客户机的网管。
因此一样内网网管能够无需设置、按X 退出15.继续按X退出16. 然后继续用WINBOX治理器连接。
接下来的配置全在WINBOX里操作完成。
在IE阅读器上输入17.点击Download 下载WINBOX下载到本地并运行输入效劳器IP地址和默许账号admin 密码为空18.敲回车进行连接19.然后点击IP-address list20.点击+号进行IP配置输入电信或网通提供给你的IP地址和子网掩码电信提供的IP地址和子网掩码。
Interface 那里选ether2 是设置第二块网卡IP。
设置完成后点OK就行。
21. 接下来继续设置外网网关。
鼠标点击IP-ROUTES 点加号22.输入外网网关后点回车。
ROS安装教程范文

ROS安装教程范文一、ROS的安装环境1. Ubuntu系统:可以使用Ubuntu 14.04/16.04/18.04/20.04 版本;2. ROS版本:Melodic/Kinetic/Noetic;3. ROS软件仓库:支持ROS软件仓库的操作系统(如:debian/Ubuntu);4. ROS软件包:ROS提供的软件包,如rospy、roscpp、vision_opencv等。
二、ROS安装步骤1.添加ROS软件仓库:在安装ROS前,需要向Ubuntu添加ROS的软件仓库,命令如下:2. 添加ROS的安全key:添加完ROS的软件仓库之后,需要添加ROS的安全key,命令如下:3. 更新Ubuntu的软件包:为了确保安装ROS过程中不会出现错误,建议更新Ubuntu的软件包,命令如下:sudo apt-get update4.安装ROS环境:要安装ROS,需要首先安装ROS环境,命令如下:sudo apt-get install ros-version-desktop-full其中,version表示使用的ROS版本,例如要安装melodic版本,则version=melodic;desktop-full表示安装完整的ROS环境,包括ROS系统基础软件、开发工具以及ROS官方提供的标准软件包。
5.初始化ROS相关环境变量:在使用ROS之前,需要初始化ROS相关环境变量,命令如下:source /opt/ros/version/setup.bash其中,version表示使用的ROS版本(例如melodic),setup.bash 为ROS的设置文件。
6.安装ROS支持的软件包:安装完ROS环境后。
ros完整的使用流程
ROS完整的使用流程1. 简介ROS(Robot Operating System)是一个用于编写机器人软件的开源框架。
它提供了一系列的工具、库和协议,用于帮助开发者构建机器人应用程序。
本文将介绍ROS的完整使用流程。
2. 安装ROS首先,我们需要在开发环境中安装ROS。
ROS支持多个操作系统,包括Ubuntu、Debian、Fedora和Mac OS X等。
以下是安装ROS的基本步骤:•步骤1:选择合适的ROS版本,并按照官方文档提供的指引下载相应的安装包。
•步骤2:安装ROS核心组件。
根据操作系统类型和ROS版本的不同,选择合适的安装命令进行安装。
•步骤3:配置ROS环境。
ROS安装完成后,需要设置一些必要的环境变量,以便系统能够正常使用ROS。
3. 创建工作空间在使用ROS进行开发之前,我们需要创建一个工作空间(Workspace),用于存放ROS相关的项目和文件。
以下是创建工作空间的步骤:•步骤1:创建工作空间目录。
通过以下命令创建一个新的工作空间目录:mkdir -p ~/catkin_ws/src•步骤2:初始化工作空间。
使用以下命令初始化工作空间:cd ~/catkin_wscatkin_make•步骤3:设置工作空间环境。
每次启动新的终端时,需要设置工作空间的环境变量路径:source ~/catkin_ws/devel/setup.bash4. 构建ROS包ROS使用包(Package)的概念来组织和管理代码。
一个ROS包是一个目录,其中包含ROS节点、消息、服务和配置等文件。
以下是构建ROS包的步骤:•步骤1:进入工作空间的src目录,使用以下命令创建一个新的包:cd ~/catkin_ws/srccatkin_create_pkg my_package rospy std_msgs•步骤2:在包中添加源代码。
将编写的ROS节点脚本或其他源代码复制到包的src目录中。
•步骤3:构建包。
树莓派介绍及操作系统搭建

树莓派介绍及操作系统搭建树莓派是一种单板电脑,由英国的树莓派基金会开发。
它的目标是教育和学习计算机科学与编程。
树莓派具有小巧、低功耗、高性能和低价格等特点,广泛应用于教育、科研、创客和嵌入式系统等领域。
树莓派的硬件配置通常包括一块处理器单元、内存、存储器、输入输出接口等基本组成部分。
最常见的树莓派型号有树莓派3和树莓派4,其中树莓派4配置更高,可以支持更复杂的任务。
树莓派的操作系统可以选择多种,常用的有Raspbian、Ubuntu Mate、Kali Linux等。
以下是介绍如何在树莓派上搭建Raspbian操作系统的步骤:3.插入SD卡并连接设备。
将制作好的启动盘插入树莓派的SD卡槽中。
接下来,连接显示器、键盘和鼠标等外设,将树莓派与电源连接。
4.开机启动。
插入SD卡后,树莓派会自动识别并启动操作系统。
启动后,你可以通过显示器来查看树莓派的界面。
5.初始设置。
首次启动树莓派时,会弹出一个引导界面,你可以进行一些初始设置,例如更改密码、配置网络连接等。
6. 更新软件。
你可以通过终端输入命令sudo apt-get update,然后输入sudo apt-get upgrade来更新软件包。
7. 安装应用程序。
在Raspbian中,你可以使用apt-get命令来安装各种应用程序,例如PythonIDE、Scratch等。
以上是在树莓派上搭建Raspbian操作系统的基本步骤,具体操作可能会有些差异。
此外,树莓派也可以安装其他操作系统,例如Ubuntu Mate和Kali Linux等,只需要将对应的镜像文件写入SD卡即可。
树莓派的应用非常广泛,可以用来学习编程、做嵌入式开发、构建家庭媒体中心等。
它支持多种编程语言,包括Python、C++、Java等,非常适合编程初学者入门学习。
同时,树莓派还支持GPIO接口,可以连接各种外设进行创客项目的开发。
总的来说,树莓派是一种功能强大、成本低廉的单板电脑,可以在计算机科学教育和创客领域发挥重要作用。
ubuntu安装ros并换源适用于16.04和18.04
ubuntu安装ros并换源适⽤于16.04和18.04ROS安装在安装源部分需要区分版本,这⾥提供了16.04和18.04两个安装版本。
值得注意的是,这⾥仅实验了x86架构。
ubuntu 16.04这是ubuntu16.04版本的ros安装教程,不适⽤其他版本。
sudo vim /etc/apt/sources.list #修改镜像⽂件# 这⾥的内容是针对ubuntu16.04,其他版本不适⽤#将这⾥的所有信息直接复制粘贴即可,先删除原⽂件中的所有内容# 默认注释了源码镜像以提⾼ apt update 速度,如有需要可⾃⾏取消注释deb https:///ubuntu/ xenial main restricted universe multiverse# deb-src https:///ubuntu/ xenial main restricted universe multiversedeb https:///ubuntu/ xenial-updates main restricted universe multiverse# deb-src https:///ubuntu/ xenial-updates main restricted universe multiversedeb https:///ubuntu/ xenial-backports main restricted universe multiverse# deb-src https:///ubuntu/ xenial-backports main restricted universe multiversedeb https:///ubuntu/ xenial-security main restricted universe multiverse# deb-src https:///ubuntu/ xenial-security main restricted universe multiverse# 预发布软件源,不建议启⽤# deb https:///ubuntu/ xenial-proposed main restricted universe multiverse# deb-src https:///ubuntu/ xenial-proposed main restricted universe multiverse# 默认注释了源码仓库,如有需要可⾃⾏取消注释deb https:///ubuntu/ xenial main restricted universe multiverse# deb-src https:///ubuntu/ xenial main restricted universe multiversedeb https:///ubuntu/ xenial-updates main restricted universe multiverse# deb-src https:///ubuntu/ xenial-updates main restricted universe multiversedeb https:///ubuntu/ xenial-backports main restricted universe multiverse# deb-src https:///ubuntu/ xenial-backports main restricted universe multiversedeb https:///ubuntu/ xenial-security main restricted universe multiverse# deb-src https:///ubuntu/ xenial-security main restricted universe multiverse# 预发布软件源,不建议启⽤# deb https:///ubuntu/ xenial-proposed main restricted universe multiverse# deb-src https:///ubuntu/ xenial-proposed main restricted universe multiversesudo sh -c '. /etc/lsb-release && echo "deb /ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'sudo sh -c '. /etc/lsb-release && echo "deb https:///ros/ubuntu/ $DISTRIB_CODENAME main" >> /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt-get update && sudo apt upgradesudo apt-get install ros-kinetic-desktop-fullUbuntu 18.04# 这⾥的是18.04的镜像需要根据不同版本进⾏选择# 默认注释了源码镜像以提⾼ apt update 速度,如有需要可⾃⾏取消注释deb https:///ubuntu/ bionic main restricted universe multiverse# deb-src https:///ubuntu/ bionic main restricted universe multiversedeb https:///ubuntu/ bionic-updates main restricted universe multiverse# deb-src https:///ubuntu/ bionic-updates main restricted universe multiversedeb https:///ubuntu/ bionic-backports main restricted universe multiverse# deb-src https:///ubuntu/ bionic-backports main restricted universe multiversedeb https:///ubuntu/ bionic-security main restricted universe multiverse# deb-src https:///ubuntu/ bionic-security main restricted universe multiverse# 预发布软件源,不建议启⽤# deb https:///ubuntu/ bionic-proposed main restricted universe multiverse# deb-src https:///ubuntu/ bionic-proposed main restricted universe multiversesudo sh -c 'echo "deb https:///ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt updatesudo apt install ros-melodic-desktop-fullInitialize rosdep在这⼀步的update命令上可能会由于⽹络原因多次失败,重复命令即可,直到成功。
机器人操作系统ROS的安装与应用开发指南

机器人操作系统ROS 的安装与应用开发指南机器人操作系统(Robot Operating System,ROS) 是一个开源的、灵活的机器人软件平台,它被广泛应用于机器人研发领域。
ROS 提供了一系列的工具和库,帮助开发者构建机器人应用程序。
本文将为您介绍R OS 的安装方法和应用开发指南,帮助您快速入门ROS 的世界。
一、ROS 的安装方法1.确认操作系统:ROS 可以运行在多种操作系统上,包括Ubuntu、Debian、Fedora等。
确保您的操作系统版本符合ROS 的要求。
2.安装R OS: 您可以通过命令行或者G UI 的方式安装R OS 。
以Ubuntu 为例,可以使用以下命令安装ROS:1sudo apt-get updatesudo apt-get install ros-<distro>-desktop-full其中,<distro> 代表您所选择的ROS 版本,如Kinetic 、Melodic 等。
3.初始化R OS 环境:安装完成后,需要初始化ROS 环境。
可以通过以下命令完成初始化:source /opt/ros/<distro>/setup.bash4.配置ROS 工作空间:ROS 提供了工作空间(workspace) 的概念,方便用户组织和管理开发项目。
可以通过以下命令创建并配置工作空间:mkdir -p~/catkin_ws/srccd ~/catkin_ws/catkin_makesource devel/setup.bash\至此,R OS 的安装已经完成。
您可以通过运行命令r osversion -d`来验证R OS 版本。
二、R0S 应用开发指南1.创建R OS 程序包:在R OS 中,程序的基本单元是包(package)。
可以使用以下命令创建一个新的R OS 程序包:cd ~/catkin_ws/srccatkin_create_pkg <package_name>std_msgs rospy roscppV 1 V其中,<package_name> 代表您所创建的包的名称。
树莓派操作系统安装教程

树莓派操作系统安装教程第一章:树莓派介绍树莓派是一款小型的单板计算机,广泛应用于教育、物联网、嵌入式系统等领域。
它具有低功耗、体积小、价格便宜等特点,非常适合初学者和爱好者使用。
第二章:准备工作在安装树莓派操作系统之前,我们需要准备以下物品:1. 树莓派主板2. 电源适配器和Micro USB电源线3. TF卡(至少16GB)4. 读卡器5. HDMI线和显示器(可选)第三章:下载操作系统镜像在安装树莓派操作系统之前,我们需要下载对应的操作系统镜像文件。
树莓派官方网站提供了多个操作系统供选择,如Raspbian、Ubuntu Mate等。
根据自己的需求选择并下载相应的镜像文件。
第四章:制作启动盘制作启动盘的步骤如下:1. 使用读卡器将TF卡连接到电脑上。
2. 打开磁盘管理工具,格式化TF卡为FAT32文件系统。
3. 使用镜像烧录工具(如Win32 Disk Imager、Etcher等),选择下载的镜像文件,并将其烧录到TF卡中。
第五章:连接硬件设备将树莓派主板与显示器、键盘、鼠标等硬件设备连接起来。
树莓派主板上有多个USB接口、HDMI接口和网络接口,根据需要连接相应的设备。
第六章:启动树莓派将TF卡插入到树莓派主板的卡槽中,并连接电源适配器。
树莓派会自动启动,并在显示器上显示系统界面。
第七章:系统初始化首次启动树莓派时,需要进行一些系统初始化设置。
按照屏幕上的提示进行操作,设置密码、网络连接等信息。
第八章:系统更新初次安装的树莓派系统可能存在一些已修复的漏洞和bug,因此需要进行系统更新。
通过在命令行中输入"sudo apt-get update"和"sudo apt-get upgrade"命令,可以更新系统的软件包和组件。
第九章:安装必备软件根据个人需要,安装一些必要的软件,如编程开发工具、媒体播放器、办公软件等。
可以通过命令行或者应用商店进行安装。
树莓派的软件安装与系统更新

树莓派的软件安装与系统更新树莓派的Raspiberry PI OS是基于Debian系统(Ubuntu也是),采⽤的是apt(Advancd Packaging Tool)软件包管理器。
此外,最常⽤的还有红帽系统中的yum( Yellow dog Updater, Modified)软件包管理器。
1.更新软件源我们可以通过sudo nano /etc/apt/sources.list编辑树莓派的软件源。
其中被#注释掉的就是原本的官⽅软件源。
deb https:///raspbian/raspbian/ buster main contrib non-free rpideb-src https:///raspbian/raspbian/ buster main contrib non-free rpi#deb /raspbian/ buster main contrib non-free rpi# Uncomment line below then 'apt-get update' to enable 'apt-get source'#deb-src /raspbian/ buster main contrib non-free rpi树莓派更新软件源只需要运⾏sudo apt update,就完成更新软件源更新,通过运⾏apt list --upgradable来查看有哪些软件可以更新了,如果要升级所有软件只需运⾏sudo apt upgrade。
pi@raspberrypi4:~ $ sudo apt update获取:1 https:///raspbian/raspbian buster InRelease [15.0 kB]获取:2 https:///raspbian/raspbian buster/main Sources [11.3 MB]命中:3 http://pipplware.pplware.pt/pipplware/dists/buster/main/binary InRelease获取:4 https:///raspbian/raspbian buster/main armhf Packages [13.0 MB]已下载 24.4 MB,耗时 17秒 (1,428 kB/s)正在读取软件包列表... 完成正在分析软件包的依赖关系树正在读取状态信息... 完成有 43 个软件包可以升级。
树莓派的入门配置

树莓派新版-入门配置来源:网络 ?? 编辑:admin如果你有密集恐惧症则只需要看标题和字体加粗部分.有下划线的是网站都可以点开的.Linux系统分支有很多国内常用的分支主要是:1.Debian2.Redhat参考:GNU/Linux发行版历年分支进化图一览.目前桌面版Debian分支相比要做的好点,服务器端肯定是Redhat分支了,因为树莓派硬件是基于ARM的,所以在树莓派官网也有针对其的编译版.RASPBIAN 对应debianPIDORA 对应 Redhat下的Fedora分支好了废话不多说,正文开始.1.系统安装写入SD卡a)在官网下载?RASPBIAN?的镜像,点击前面的链接下载,最新版本有900多M,下载后解压文件.b)这里推荐使用Win32DiskImager这款软件来将树莓派系统写入到SD卡c)然后将SD卡插入树莓派,并且连接上网线和电源.2.使用 raspi-config工具配置树莓派a)查看ip正常情况下树莓派就可以启动了,但是现在还不知道他的IP,无法用ssh的方式进入系统,如果会用路由器查看ip的朋友就不是事,如果不会的可以使用Advanced IP scanner这款软件查看.b)系统配置知道IP了就可以进入系统配置了树莓派的默认账号是pi,默认密码是raspberry.SSH进入后输入?sudo raspi-config这个命令会弹出这个命令行配置界面1 Expand Filesystem扩展文件系统按回车即可.(将SD卡利用率最大化).2 Change User Password?改变默认pi用户的密码.3 Enable Boot to Desktop/Scratch启动时进入的环境选择? Console Text console, requiring login(default)? 启动时进入字符控制台,需要进行登录(默认项)? Desktop log in as user "pi" at the graphical desktop? 启动时进入LXDE图形界面的桌面? Scratch Start the Scratch programming environment upon boot? 启动时进入Scratch编程环境,进入后,可以点File->Exit退出,然后在退出过程中按Ctrl+C进入控制台。
树莓派安装ros

树莓派安装ros之前电脑安装过ros感觉还好,没成想这次在树莓派上安装费⽼劲了,出现了很多错误,装了卸,卸了装废了半天劲下⾯将⼀些安装的错误和问题做个总结⽅便以后的安装也希望给别⼈⼀个参考ros安装(对照⾃⼰的版本,我的是melodic)官⽅版本国内源下⾯两个都可以⽹络问题⽆线⽹络树莓派连接wifi的⽅法⾸先使⽤sudo iwconfig wlan0 up 启动⽆线⽹络:以太⽹这篇⽂章中介绍了使⽤电脑共享⽹络使树莓派联⽹的⽅式安装ros中的问题sudo ros init错误问题来⾃:错误类型1:解决办法1打开hosts⽂件sudo gedit /etc/hosts#在⽂件末尾添加151.101.84.133 #保存后退出再尝试解决办法2sudo c_rehash /etc/ssl/certssudo -E rosdep initrosdep updatereading in sources list data from /etc/ros/rosdep/sources.list.dERROR: unable to process source [https:///ros/rosdistro/master/rosdep/osx-homebrew.y aml]:<urlopen error _ssl.c:495: The handshake operation timed out> (https:///ros/rosdistro/ma ster/rosdep/osx-homebrew.yaml)Hit https:///ros/rosdistro/master/rosdep/base.yamlERROR: error loading sources list:The read operation timed outreading in sources list data from /etc/ros/rosdep/sources.list.dERROR: unable to process source [https:///ros/rosdistro/master/rosdep/osx-homebrew.y aml]:<urlopen error _ssl.c:495: The handshake operation timed out> (https:///ros/rosdistro/ma ster/rosdep/osx-homebrew.yaml)Hit https:///ros/rosdistro/master/rosdep/base.yamlERROR: error loading sources list:The read operation timed out运⾏:(⽹络换成⼿机热点,如果是time out,那就多尝试⼏次) 如果还是提⽰错误,请将源更更换为清华源,然后sudo apt update (请将⽹络换成⼿机热点) rosdep update出错sudo apt-get updatesudo apt-get install python-rosdep错误类型2:这个问题原因在于,20-default.list在你的系统中已经存在,删除掉:sudo rm /etc/ros/rosdep/sources.list.d/20-default.list再次尝试sudo rosdep initrosdep update问题可以尝试使⽤电脑/树莓派连接⼿机热点来rosdep update不⾏可以参考下⾯步骤,很有效来⾃:2021最新解决⽅法但近期,通过修改hosts⽂件解决rosdep update失败的⽅法也不太好⽤了,成功⼏率很低。
RaspbianLiteGuideGUI树莓派安装桌面

RaspbianLiteGuideGUI树莓派安装桌⾯第1部分 - 建⽴基础在这⼀部分,我们将专注于准备Raspbian Lite。
#sudo nano /etc/wpa_supplicant/wpa_supplicant.conf在⽂件中加⼊以下:4.1也可以使⽤树莓派来配置WI-FI4.1.1运⾏:#sudo raspi-config1. 选择2 Network Options.2.N2 WI-FI(选择后输⼊SSID密码就可以了。
)5.连接电视/显⽰器和键盘。
(此时⿏标是可选的。
)打开Pi。
Pi应该成功启动并出现登录提⽰。
6.登录Raspbian。
⽤户名是pi,密码是raspberry。
第2部分 - 更新系统到最新。
1.安装更新,如果提⽰确认请输⼊Y.#sudo apt-get update#sudo apt-get upgrade#sudo apt-get dist-upgrade2.运⾏完成后需要做⼀个清理。
#sudo apt-get clean第3部分 - 设定本地化。
1.⾸先们需安装中⽂的字体,不然会乱码。
sudo apt-get install ttf-wqy-zenhei ttf-wqy-microhei 安装⽂泉驿字体,若有中⽂字体则省略2 .使⽤配置本地地址: sudo raspi-config3. 选择第四项 locallisation Options4. I1 change locale5. zh_cn.UTF8 和UTF-8 zh_GBK 空格键选择后 tab键确认6. 再次选择zh_cn.UTF-86.重启 sudo reboot第4部分 - 开始安装桌⾯。
下⼀部分重点介绍如何在Raspbian Lite上安装GUI。
为了拥有GUI,我们需要以下4件事1.显⽰服务器2.桌⾯环境3.窗⼝管理器4.登录管理器1.打开你的Pi并登录。
我们将安装Xorg。
要执⾏此操作,请键⼊:sudo apt-get install --no-install-recommends xserver-xorg然后按Enter键。
ROS安装及配置教程11
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
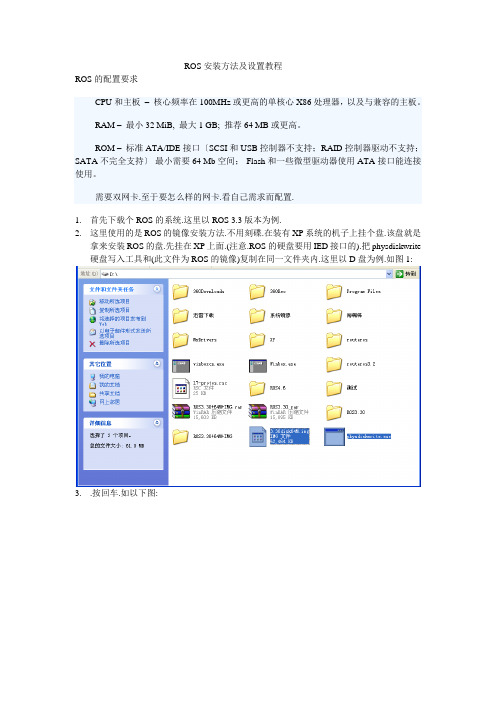
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
树莓派教学图文资料总汇,初次使用必看
树莓派资料目录树莓派电子硬件商城:视频:/raspberryV8.1树莓派版本厂商产地等基本知识 (4)二、操作之前的准备 (5)2.1警告和声明 (5)2.2相关必备配件 (5)2.3显示器和显示器接口 (6)2.4树莓派各个接口的认识 (7)2.5安全操作建议 (8)三、树莓派主板运行问题判断 (9)3.1、LED指示灯常见状态解答 (9)3.1.1、红灯常亮 (9)3.1.2、红灯、绿灯常亮 (9)3.1.3、红灯常亮,绿灯闪烁 (9)3.2、网口灯、以及发烫发热 (10)3.2.1、主板网口灯 (10)3.2.2、正常发热 (10)3.2.3、异常发热 (10)3.3、显示器常见问解决 (10)3.3.1、config分辨率配置问题 (10)3.3.2、HDMI转VGA兼容问题 (10)3.3.3、自身质量问题 (11)3.3.4、AV接口问题 (11)四、树莓派系统介绍下载 (12)4.1、常用系统: (12)4.2、其它系统: (12)4.3、必备的工具软件: (12)五、安装系统 (14)5.1、系统安装注意事项 (14)5.1.1、什么版本系统能用 (14)5.2、Raspbian系统安装 (14)5.2.1详细的系统安装过程 (14)5.2.2、TF/SD卡容量问题 (15)5.2.3、Config.txt分辨率的配置 (15)六、风扇与散热片的安装 (17)6.1、树莓派散热片安装 (17)6.2、树莓派小风扇的安装 (17)七、树莓派启动 (18)7.1、常用外设的安装 (18)7.1.1、外设安装 (18)7.1.2、开发外设安装 (18)7.2、树莓派上电开机 (18)八、系统的设置 (19)8.1、Raspi-config介绍8.2、Expand Filesystem TF卡扩展 (19)8.3、Change User Password改密码 (19)8.4、Boot Options开机自动进入桌面 (20)8.5、Wait for Network at Boot (20)8.6、Internationalisation Options语言、时区等 (21)8.6.1、Change locale语言设置 (21)8.6.2、change timezone时区设置 (22)8.6.3、Change Keyboard Layout键盘布局 (22)8.6.4、Change Wi-Fi Country (22)8.7、Enable Camera (23)8.8、Add to Rastrack (23)8.9、Overclock (23)8.10、Advanced Options杂项 (23)九、账号、密码、ROOT (24)十、必备的软件和环境的安装 (25)10.1、安装中文字库 (25)10.2、安装输入法 (25)10.5、其它命令 (25)十一、系统备份、还原与TF卡重做系统 (26)11.1、系统备份 (26)11.2、将TF卡恢复都空白卡状态 (26)11.3、系统还原 (26)十二、树莓派Linux内核编译 (27)12.1、树莓派所有的开源软件 (27)12.1.1、三组核心源码部分 (27)12.1.2、可以了解的源码 (27)12.2、源码下载与方法 (27)12.2.1、网页直接下载 (28)12.2.2、使用git下载源码 (28)12.3、编译、提取内核及其模块 (28)12.3.1、获取内核配置文件 (28)12.3.2、配置编译内核 (29)12.3.3、升级RPi的kernel、Firmware、lib (30)十三、搭建WEB服务器 (31)13.1、Apache+MySql+Php方式 (31)13.1.1、软件介绍 (31)13.1.2、Apache的安装 (31)13.1.3、mysql的安装 (31)13.1.4、安装PHP (32)13.1.5、测试 (32)13.2、nginx+php+sqlite方式(荐) (32)13.2.1、如何安装nginx web服务器 (32)13.2.2、如何启动nginx (32)13.2.3、PHP脚本支持 (33)13.2.4、安装php和sqlite (33)13.2.5、基本测试 (33)十四、CSI接口的摄像头使用方法 (35)14.1、摄像头CSI接口排线安装方法 (35)14.2、摄像头常用命令操作 (36)1.1、使用下列命令获取当前激活的设置: (37)树莓派电子硬件商城:视频:/raspberry一、树莓派版本,厂商,产地,等基本知识左为‘E诺盟’版本,右为‘RS’版本树莓派官方在全球指定了两个厂商来负责生产树莓派主板,分别是‘RS电子’和‘E诺盟电子’,这两个都是跨国的大型国际贸易公司。
基于树莓派的智能清洁垃圾桶的设计

2023年 / 第8期 物联网技术790 引 言随着社会的发展和科技的进步,环境和资源问题被大多数人所关注,垃圾分类也被提上日程;进一步地,各类智能垃圾桶随着智能科技的发展不断问世。
然而,许多家庭仍在使用传统的垃圾桶。
由于传统垃圾桶位置固定,垃圾桶距离远时扔垃圾不方便,还存在功能单一、无法分类等问题,不能明显提高人们的生活环境和质量,且不利于推动垃圾分类的实施[1-4]。
目前市面上的智能垃圾桶一般只具备单一的配置WiFi 或蓝牙功能,并不能完全从根本上解决原本就存在的问题。
本文所述的智能清洁垃圾桶结合家庭用户及服务行业需求解决了多个有关垃圾桶使用的问题,效率更高,功能更全,更便于实现家庭垃圾分类[5]。
1 总体方案设计本设计以性能强大、模块的拓展性强,以及通过USB串口可以连接多种模块进行操作的树莓派4B 作为系统的主控芯片。
树莓派上运行的ROS 主要作用于智能清洁垃圾桶的数据处理以及指令发布,机身连接着USB 摄像头、麦克风阵列、激光雷达、扬声器。
因为控制左右轮电机采用的是PID 算法,而PID 算法是一种实时性算法,采用严格的实时时钟驱动逻辑,作为上位机的大部分系统满足不了高时效性,所以采用STM32作为本设计的辅助控制芯片,负责指令动作的直接执行,直接驱动左右轮的运作,实现智能清洁垃圾桶的移动、清洁、旋转桶盖等功能[3]。
智能清洁垃圾桶总体由分类垃圾桶、清洁机器人和充电桩这3个部分组成,清洁机器人和分类垃圾桶采用可分离式结构设计,正常模式下作为移动式智能垃圾桶,当用户下达清洁指令后机身分离,清洁机器人脱离分类垃圾桶并记录当前位置执行清洁任务,执行完清洁任务后自动返回合体,并且该智能清洁垃圾桶可以通过手机APP 和电脑远程登录ROS 系统管理和控制。
总体方案设计如图1所示。
2 系统硬件设计系统硬件主要由控制模块、视觉分类模块、运动清洁模块、激光雷达模块、语言交互与声源定位模块组成。
树莓派4B 作为主控单元,通过串口与STM32F103C8T6驱动板通信,调节各个模块之间的运行。
树莓派使用手册

树莓派使用手册树莓派是一款迷你型单板电脑,被广泛应用于物联网、教育、嵌入式系统等领域。
本手册旨在为初学者介绍树莓派的基本使用方法和相关技巧,帮助读者快速上手树莓派。
1. 树莓派简介树莓派是由英国树莓派基金会开发的一款单板电脑,其设计初衷是为了促进学校的计算机科学教育。
树莓派具有小巧灵活、低功耗、价格亲民等特点,广受欢迎。
它搭载了Linux操作系统,并支持多种编程语言,可以实现从简单的网络浏览到复杂的物联网项目等各种应用。
2. 准备工作在开始使用树莓派之前,您需要准备以下材料:- 一台树莓派单板电脑- 一张MicroSD卡(用于安装操作系统和存储数据)- 一个MicroSD卡读卡器- 一根HDMI线(用于连接树莓派和显示器)- 一个USB键盘和鼠标- 一个电源适配器3. 安装操作系统树莓派的操作系统使用的是Raspbian,这是一款基于Linux的操作系统。
您可以通过以下步骤来安装Raspbian:1)将MicroSD卡插入电脑,并使用官方提供的SD Formatter工具将其格式化。
2)下载Raspbian系统映像文件,并使用官方提供的Balena Etcher工具将映像文件写入MicroSD卡中。
3)将MicroSD卡插入树莓派的MicroSD卡槽中,连接显示器、键盘和鼠标,并插入电源适配器启动树莓派。
4. 初次启动树莓派当树莓派启动后,您将看到Raspbian的桌面环境。
在初次使用之前,建议您进行一些基本设置,比如修改密码、设置无线网络等。
您可以点击桌面左上角的Raspberry Pi图标,选择相应的选项进行设置。
5. 使用树莓派树莓派提供了丰富的功能和应用,下面介绍几个常用的用途:- 简单的电脑:通过连接显示器、键盘和鼠标,您可以在树莓派上进行办公、上网等基本操作。
- 学习编程:树莓派支持多种编程语言,比如Python、C++等,您可以通过编写代码来学习编程知识。
- 搭建服务器:树莓派可以作为一个低功耗的服务器,您可以通过安装相应软件如Apache、MySQL等来搭建个人网站或者局域网服务。
ROS安装及配置教程
ROS安装及配置教程ROS(Robot Operating System)是一个开源机器人操作系统,它提供了一系列的工具和库以帮助开发者构建机器人应用程序。
本文将介绍ROS的安装和配置过程。
ROS支持多个操作系统,包括Ubuntu、Debian、Fedora等。
在本教程中,我们将使用最常用的Ubuntu系统进行演示。
第一步:安装Ubuntu首先,在您的计算机上安装Ubuntu操作系统。
ROS支持多个Ubuntu 版本,但在本教程中,我们将使用最新版本的Ubuntu 20.04 LTS作为示例。
第二步:添加ROS软件包仓库在安装ROS之前,我们需要将ROS软件包仓库添加到Ubuntu的软件源中。
打开终端并执行以下命令:``````第三步:添加ROS密钥运行以下命令以添加ROS密钥:```sudo apt install curl```第四步:安装ROS运行以下命令以安装ROS桌面完整版:```sudo apt updatesudo apt install ros-noetic-desktop-full```在这个例子中,我们使用的是ROS Noetic版本。
根据您的需求,您可以安装不同的ROS版本。
第五步:初始化ROS在安装完成后,我们需要初始化ROS环境。
打开终端并运行以下命令:```source /opt/ros/noetic/setup.bash```要使ROS环境变量在每次打开新终端时都自动加载,可以将上述命令添加到您的`.bashrc`文件中。
第六步:创建ROS工作空间在使用ROS之前,我们需要创建一个ROS工作空间。
ROS工作空间是您存放ROS代码和构建项目的地方。
首先,创建一个名为`catkin_ws`的目录,并进入该目录:```mkdir -p ~/catkin_ws/srccd ~/catkin_ws/```然后,初始化工作空间:```catkin_make```完成初始化后```source devel/setup.bash```第七步:安装ROS工具运行以下命令以安装常用的ROS工具:```sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential ```第八步:配置ROS最后,运行以下命令以更新ROS依赖项:```sudo rosdep initrosdep update```至此,ROS的安装和配置已经完成。
ROS安装及设置简易教程by锅片儿
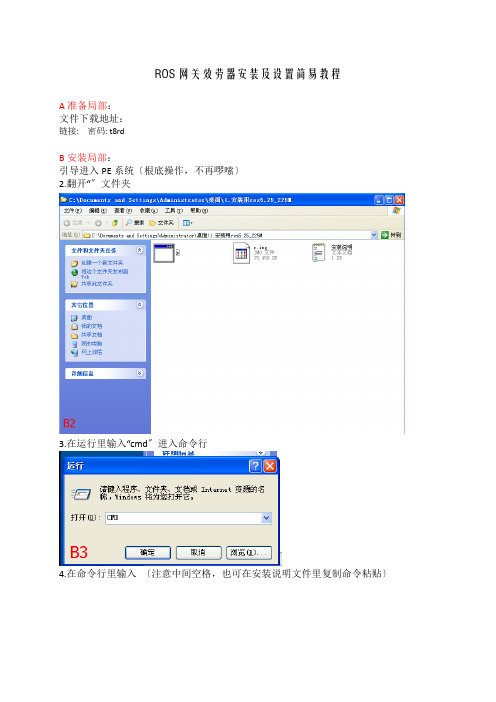
ROS网关效劳器安装及设置简易教程A准备局部:文件下载地址:链接: 密码: t8rdB安装局部:引导进入PE系统〔根底操作,不再啰嗦〕2.翻开“〞文件夹3.在运行里输入“cmd〞进入命令行4.在命令行里输入〔注意中间空格,也可在安装说明文件里复制命令粘贴〕5.选择需要安装到的磁盘。
其中0..1表示硬盘.〔如果只有1个盘显示0..0.〕这时要看清楚那块是要安装到的硬盘。
输入对应的序号后回车〔我这里要输入0〕。
6. 。
然后会把镜像写入硬盘,写入完了手动重启即可。
C配置局部:效劳器的一个网卡插到交换机,这个网卡当做效劳器的内网;找局域网中的另一台与这台效劳器在同一网络的任意电脑,运行文件中的winbox程序。
2.开场链接效劳器,点击…按钮3.之后选择MAC地址没有密码,直接点击链接5.点击Interfaces修改网络名称,可以把内网改为lan,外网改为wan以便区分,操作如图。
通常后边网络数据比拟大的是内网。
6.准备设置ip地址。
依次点击IP---Addresses7.设置外网IP。
以四中为例,“沁阳教育系统最新IP规划(参考)〞表中显示为10.0.20.9/30,设置时要在把IP最后一位+1,点击红色加号填入,然后下边选择wan网卡,点击OK。
8.设置内网IP。
表中显示,设置的时候直接使用该地址,/后的数字根据不同学校来确定,1个C的填入24,2个C的填入23,4个C的填入22。
再次点击红色加号,比方四中就要填入,然后下边选择lan网卡,点击OK。
9.设置外网网关。
依次点击IP---Routers,点击红色加号,在Gateway〔网关〕处填入表中的wan地址1.,点OK。
10.设置路由。
依次点击IP---Firewall----nat,点击红色加号,点击Action标签,下拉菜单项选择择masquerade,然后点击OK。
到此效劳器根本设置完成。
一步,插上外网网线,设置内部非效劳器电脑的本地连接属性。
ros最新安装教程(图文教程)

ros最新安装教程(图⽂教程)ros安装教程(图⽂教程)1、安装ROS除了⾃⼰学习和测试⽤ROS外,最好还是单独⽤⼀台机器,相信这也不⽤多说,安装的时候要注意的是硬盘⼀定要接在IDE0上⾯,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、⽤安装光盘启动后,如图1:/doc/e72a9f6148d7c1c708a14550.html图1选择i 进⼊安装界⾯选择需要安装的package,图2图 2 /doc/e72a9f6148d7c1c708a14550.html选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进⼊ROS是未注册的版本,如图4 图⽤光驱启动,在启动菜单按c破解,图5图5破解之后进⼊已经没有了未注册提⽰。
见图6图32、服务端配置/interface pri 能显⽰出你现在可⽤的⽹卡。
如图6 图/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内⽹IP,其中192.168.1.1/24添⾃⼰的内⽹IP ,设置成功没有提⽰,可以⽤pri查看见图7图73、winbox配置(所有配置都在这⾥进⾏)在局域⽹其他机器IE浏览器192.168.1.1 进⼊WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输⼊IP和⽤户名连接(图8)图8进⼊配置界⾯(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添⽹通和电信给的IP/⼦⽹掩码(不要和我的⼀样...),红*部分是⾃动添加的.图10图10(3)IP->ROUTE,+号添加默认的⽹关,默认⽹通就添⽹通⽹关,默认电信就添电信的⽹关,这⾥默认电信. 如图11,正常下⿊圈处11(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡⾥为masquerade.OK,现在可以通过电信上⽹了.图12图12在WINBOX中,NEW TERMINAL,输⼊import cnc完成.如图14 图14现在已经可以电信⽹通⾃动切换了.(6)只是切换也不太安全,⼀定要配制⼀下防⽕墙么,同5⼀样,上传防⽕墙的RSC⽂件到192.168.1.1,在NEW TERMINAL ⾥执⾏import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16⾄此,基本OK了.第⼀次写教程⽤了2个多⼩时呵呵..有什么不完整的地⽅欢迎⼤家补充,⼤家可以从本站下载ROS 2.9.6破解版。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
树莓派搭建ROS Kinetic V1.6桌面版系统
这次版本的镜像是基于官方raspbian buster系统来编译ROS软件包的,所以镜像可以在所有树莓派板子上运行,包括树莓派4B,3B+,3B等。
本次发布的镜像主要升级的内容如下:
1)新增编译17个软件包,目前系统中共编译有270个常用的ros软件包,使日常开发ROS更加方便,省去大家自行编译常用软件包。
2)所有ROS软件包源码都更新到官方最新版本进行编译,完整编译并解决所有编译、运行错误,共耗时22天时间。
3)安装了rplidar、ydlidar所有雷达型号的驱动程序,在树莓派中方便接上雷达使用。
4)安装了Visual Stdio Code IDE的社区编译版本Code-OSS,外观、使用方法跟VS Code IDE是一样的,这样方便大家编写、阅读代码。
5)树莓派buster系统的插件、软件更新到最新稳定板,Arduino IDE 更新到最新版本1.8.12。
6)解决move_base启动时异常的问题,现在系统可以进行完整的slam 建图、自动导航。
雷达测试
系统下载
该版本镜像目前为免费下载,可以体验使用。
但是只能开机使用6次。
如果第6次开机还没有进行激活码激活,那么ROS功能将无法使用,系统其他功能正常运行。
若感觉系统已经满足自己的需要,可以再购买激活码进行
激活。
若不激活那这样就跟树莓派官网上的最新普通树莓派系统是一样的了,可以当做一个普通的树莓派系统来使用。
对于旧版本的镜像是:一次下载可以永久使用,不需要使用激活码进行激活。
系统激活
经过测试发现当前版本的系统已经满足了自己的需要,那就可以选择激活系统来长期使用了。
我们准备了一个激活客户端程序,可以在home目录下发现名字为register_client的执行程序。
激活过程的各种操作,如下图所示:
注意事项
[1].该树莓派系统镜像,可以在树莓派全系列的所有板子上运行。
例如树莓派4B、树莓派3B+、3B等板子都是可以正常运行使用。
[2].系统启动后,默认的用户名是corvin,密码同corvin。
对于系统的root 用户,密码同corvin。
用户名密码可以根据需要自行修改。
[3].系统已经默认开启了22端口的ssh-server和5900端口的vnc-server,这样大家就可以很方便的ssh连接和vnc远程桌面连接了。
[4].该系统已经集成好语音板和IMU板的驱动,所以可以直接将语音板和IMU板插在树莓派上使用,非常的方便。
[5].该系统为官方最新raspbian buster arm32位系统,无法使用apt来安装ros相关软件包,若想安装其他ros软件包都需要使用对应源码进行编译安装。