Bullet中最近点距离算法
点到曲线的最短距离公式拉格朗日

标题:深度解析:点到曲线的最短距离公式拉格朗日在数学问题中,求解点到曲线的最短距离是一个非常经典的问题。
而其中用到的最短距离公式与拉格朗日乘数法紧密相关。
本文将深入探讨这一问题,从简单到复杂,逐步解析点到曲线的最短距离公式,并结合拉格朗日乘数法,带您领略这一数学奥妙。
一、点到曲线的距离概念我们首先来理解一下点到曲线的距离概念。
假设有一条曲线C,以及平面上的一个点P(x0, y0),我们希望求解这个点到曲线C的最短距离。
为了方便起见,我们将曲线C表示为函数形式y=f(x),那么点P到曲线C的距离可以表示为d(x)=(x-x0)^2+(f(x)-y0)^2的开方。
二、最短距离公式的推导接下来,我们将通过数学推导来得出点到曲线的最短距离公式。
我们希望最小化距离函数d(x),因此需要求解d(x)的极值点。
根据极值点的性质,我们知道极值点的导数为0。
对d(x)求导可得d'(x)=0,进而得出f'(x)*(f(x)-y0)+(x-x0)=0。
这是一个方程,我们可以通过求解这个方程来得到最短距离的点。
三、拉格朗日乘数法的应用当我们面对多个约束条件进行最优化时,拉格朗日乘数法就能够派上用场。
在点到曲线的最短距离求解中,我们有一个显而易见的约束条件,那就是点P的坐标(x0, y0)必须在曲线C上。
我们可以建立拉格朗日函数L(x, y, λ)=d^2(x)-λ(g(x, y)), 其中λ为拉格朗日乘数,g(x, y)=0为约束条件。
通过对L(x, y, λ)进行偏导数运算,我们可以得出极值点的方程组,进而求解出最短距离的点。
四、结合实例分析为了更好地理解点到曲线的最短距离公式和拉格朗日乘数法,我们来看一个具体的例子。
假设曲线C为y=x^2,点P为(1, 2)。
我们可以按照上述方法,首先求出距离函数d(x),再求出极值点的方程,最后应用拉格朗日乘数法来求解。
通过计算,我们得出最短距离的点为(1, 1)。
unity 点到线段最近的点

在Unity中,要找到一个点到线段的最短距离,你可以使用一些基本的几何知识。
假设你有一个线段,由两个点A和B定义,然后你有一个点P,你想找到P到线段AB的最近点。
首先,我们需要计算线段AB的中点M。
中点M的坐标是(A.x + B.x) / 2 和(A.y + B.y) / 2。
然后,我们需要计算向量AP和向量BM。
向量AP的坐标是P.x - A.x 和P.y - A.y,向量BM的坐标是M.x - B.x 和M.y - B.y。
接下来,我们需要计算向量AP和向量BM的点乘(dot product)。
如果点乘的结果是正的,那么P点在AB线段的同一侧,最近点就是M。
如果点乘的结果是负的,那么P点在AB线段的两侧,我们需要进一步计算。
如果点乘的结果是负的,我们需要计算向量AP和向量BM的叉乘(cross product)。
叉乘的结果是一个向量,其长度等于两向量的模长之积乘以sin(θ),其中θ是两向量之间的夹角。
叉乘向量的方向与两向量形成的平面垂直,指向右方(在大多数坐标系统中)。
如果叉乘的结果是正的,那么最近点在B和M之间,我们可以通过计算BM和BP的比例来找到具体的位置。
如果叉乘的结果是负的,那么最近点在A和M之间,我们可以通过计算AM和AP的比例来找到具体的位置。
最近邻点法

最近邻点法最近邻点法是一种常用的数据挖掘算法,它可以用于分类、回归和聚类等任务。
该算法的核心思想是找到与目标数据点最近的已知数据点,并将其标记为同一类别或进行相似度计算。
在本文中,我们将介绍最近邻点法的原理、应用和优缺点。
最近邻点法的原理是基于距离度量的,即通过计算数据点之间的距离来确定它们之间的相似度。
在分类任务中,我们需要将未知数据点分配到已知类别中的某一类。
为了实现这一目标,我们需要首先计算未知数据点与已知数据点之间的距离,然后找到距离最近的已知数据点,并将其类别标记为未知数据点的类别。
在回归任务中,我们需要预测未知数据点的数值,这可以通过计算最近邻点的平均值或加权平均值来实现。
在聚类任务中,我们需要将数据点分组成不同的簇,这可以通过将最近邻点分配到同一簇中来实现。
最近邻点法的应用非常广泛,它可以用于图像识别、语音识别、推荐系统、医学诊断等领域。
例如,在图像识别中,我们可以将图像中的每个像素点看作一个数据点,并使用最近邻点法来识别图像中的物体。
在推荐系统中,我们可以将用户的历史行为看作已知数据点,并使用最近邻点法来推荐相似的产品或服务。
最近邻点法的优点是简单易懂、易于实现,并且可以处理高维数据。
然而,它也存在一些缺点。
首先,它对噪声和异常值非常敏感,这可能导致错误的分类或预测结果。
其次,它需要存储所有的已知数据点,这会占用大量的内存空间。
最后,它的计算复杂度较高,特别是在处理大规模数据时,计算时间会非常长。
最近邻点法是一种简单而有效的数据挖掘算法,它可以用于分类、回归和聚类等任务。
在实际应用中,我们需要根据具体情况选择合适的距离度量方法和算法参数,以获得最佳的分类或预测结果。
Python中的最短路径算法详解
Python中的最短路径算法详解Python是一门高效的编程语言,其强大的算法库包含了许多经典的算法,比如最短路径算法。
最短路径算法是图论中的一个经典问题,它的目的是在图中寻找从一个指定顶点到另一个指定顶点的最短路径,即边权重之和最小的路径。
最短路径算法有很多种,其中比较常见的有Dijkstra算法、Bellman-Ford算法和Floyd算法。
接下来我将分别介绍这3种算法的原理和Python实现。
1. Dijkstra算法Dijkstra算法是最短路径算法中比较经典的一种,它采用贪心策略,通过每次选取当前离源点最近的节点来不断扩展路径,直至到达终点。
它的基本思路如下:步骤1:定义源点s到其它节点的距离数组dist[],每当找到一条从源点可以到达的路径,就比较这条路径的长度和已知的最短路径长度,如果路径更短,就替换当前的最短路径长度,并更新终点节点的前一个节点。
步骤2:标记源点s为已经访问过的节点,将该节点入队,并在队列中取出此时距离源点最近的节点v。
步骤3:对所有与节点v相邻的节点w,计算出新的距离dist[s][w],如果dist[s][w]小于已知的最短距离,就更新最短距离,并将节点w加入队列中。
步骤4:重复步骤2和步骤3,直到队列为空。
Dijkstra算法的时间复杂度为O(n^2),其中n为节点数,因此它适用于稠密图。
下面是Python中Dijkstra算法的代码实现:```pythonimport heapqdef dijkstra(graph, start):#初始距离和前驱节点dist = {start: 0}previous = {start: None}#所有未确定最短距离的节点放入堆中heap = [(0, start)]heapq.heapify(heap)while heap:(d, u) = heapq.heappop(heap)#如果已经处理过该节点,则直接跳过if u in dist and d > dist[u]:continuefor v, w in graph[u].items():#计算新的距离newdist = dist[u] + w#如果新距离比原距离更小,则更新距离和前驱节点if v not in dist or newdist < dist[v]:dist[v] = newdistprevious[v] = uheapq.heappush(heap, (newdist, v))return (dist, previous)#测试graph = {'A': {"B": 2, "D": 4},'B': {"C": 3, "D": 1},'C': {"D": 1, "E": 5},'D': {"E": 1},'E': {}}dist, prev = dijkstra(graph, 'A')print(dist) # {'A': 0, 'B': 2, 'D': 3, 'C': 5, 'E': 4}print(prev) # {'A': None, 'B': 'A', 'D': 'B', 'C': 'B', 'E': 'D'}```2. Bellman-Ford算法Bellman-Ford算法是一种适用于有向图的单源最短路径算法,它可以处理有负权边的情况,但是不能处理负环的情况。
坐标计算最近距离计算公式

坐标计算最近距离计算公式在计算机科学和数学领域中,我们经常需要计算两个点之间的距离。
而当这些点的坐标在平面或者三维空间中给出时,我们可以使用最近距离计算公式来进行计算。
这种公式很常见,也是计算几何学和数据挖掘领域的基础知识之一。
1. 平面坐标系中的最近距离计算公式在平面坐标系中,最近距离计算公式可以用来计算两个点之间的欧几里德距离。
假设点A的坐标为 (x1, y1),点B的坐标为 (x2, y2),那么这两个点之间的最近距离可以通过以下公式来计算:距离= √((x1 - x2)^2 + (y1 - y2)^2)这个公式是基于勾股定理推导出来的,它描述了两个点之间的直线距离。
通过将坐标差的平方相加并计算平方根,我们可以得到两个点之间的欧几里德距离。
2. 三维空间中的最近距离计算公式在三维空间中,最近距离计算公式可以用来计算两个点之间的欧几里德距离。
假设点A的坐标为 (x1, y1, z1),点B的坐标为 (x2, y2, z2),那么这两个点之间的最近距离可以通过以下公式来计算:距离= √((x1 - x2)^2 + (y1 - y2)^2 + (z1 - z2)^2)这个公式和平面坐标系中的计算公式非常类似,只是在三维空间中需要考虑坐标的第三个分量。
3. 应用举例最近距离计算公式在很多领域都有广泛的应用,例如:•地理信息系统(GIS):用于计算两个地理坐标点之间的距离,以便进行地理空间分析和路径规划。
•图像处理:用于计算图像中两个像素点之间的距离,以便进行图像分割和目标检测。
•数据挖掘和机器学习:用于计算数据集中样本之间的距离,以便进行聚类分析和异常检测。
这些只是最近距离计算公式的一些应用举例,它在实际问题中的应用非常广泛。
4. 总结在计算机科学和数学领域中,坐标计算最近距离计算公式是非常重要的基础知识。
通过计算两个点之间的欧几里德距离,我们可以获得它们之间的直线距离。
这种公式在平面坐标系和三维空间中都有应用,并且在众多领域中发挥着重要的作用。
计算多边形内部的点到多边形边框的最近距离
一、概述多边形(polygon)是几何学中的一个重要概念,指的是一个由连续的直线段所组成的闭合图形。
计算多边形内部的点到多边形边框的最近距离是一个经典的几何学问题,其在计算机图形学、地理信息系统等领域有着重要的应用。
本文将对这一问题进行深入探讨,并给出相应的算法和实现方法。
二、问题描述多边形内部的点到多边形边框的最近距离,是指对于给定的一个多边形和一个点,要求计算该点到多边形边框的最近距离。
这个问题的解决不仅需要考虑几何学的原理,还需要结合计算机算法的设计和实现。
因为多边形的形状和尺寸多种多样,所以对于不同的多边形,需要采用不同的算法来计算其内部点到边框的最近距离。
三、问题分析1. 几何学角度:从几何学的角度来看,对于任意一个多边形和一个点,可以使用点到线段的距离公式来计算点到多边形边框的最近距离。
这涉及到点、直线、线段等几何学概念的运用。
2. 算法设计:基于几何学的原理,需要设计相应的算法来实现点到多边形边框最近距离的计算。
不同的多边形可能需要不同的算法来处理,如凸多边形和凹多边形可能要采用不同的算法。
3. 实现方法:在计算机程序中,需要将设计好的算法转化为具体的代码实现。
这涉及到数据结构、算法复杂度等计算机科学的知识。
四、相关工作在计算多边形内部点到边框的最近距离方面,已经有不少学者做出了相关的研究工作。
他们提出了一些经典的算法和方法,如距离场法、边界扩展法、分段线性逼近法等。
这些方法在一定范围内都能解决多边形内部点到边框的最近距离问题,并且在某些场景下有着较好的效果。
五、解决方案1. 距离场法:这种方法利用距离场的概念,将多边形边框上的点扩展成一组网格,然后利用距离场的计算方式,可以轻松得到多边形边框上的点到多边形内部任意一点的最近距离。
2. 边界扩展法:该方法通过对多边形边框进行扩展,将多边形的内部和外部划分为不同的区域,然后通过对每个区域进行扫描,可以得到多边形内部点到边框的最近距离。
bullet2.74chinese

Bullet物理引擎中文文档英文文档正在更新中详情查看Wiki和论坛()© 2009 Erwin CoumansAll Rights Reserved.翻译:五行谦饼Email:cqw1022@目录1. 简介 (4)1.1. 类库描述 (4)1.2. 2.74版新添加的元素 (4)1.3. 计划 (4)1.4. 主要特性 (4)1.5. 联系和支持 (4)2. 快速入门 (4)3. 类库概述 (5)3.1. 简介 (5)3.2. 软件设计 (5)3.3. 刚体物理管线 (5)3.4. 整体概貌 (6)3.5. 基本数据类型和数学类库 (6)3.6. 内存管理、分配和容器 (7)3.7. 时间和性能分析 (8)3.8. 调试画图 (8)4. Bullet的碰撞检测 (8)4.1. 碰撞检测 (8)4.2. 碰撞图形 (9)4.3. 凸原始图元 (10)4.4. 复合图形 (10)4.5. 凸核图形 (10)4.6. 凹三角网格 (10)4.7. 凸分解 (10)4.8. 高度场 (10)4.9. Buttle的静态平面(btStaticPlane)图形 (10)4.10. 碰撞图形缩放 (10)4.11. 碰撞边框 (10)5. 碰撞过滤(选择碰撞) (11)5.1. 用掩码来过滤碰撞 (11)5.2. 用初测阶段的回调过滤器来过滤碰撞 (12)5.3. 用细测阶段的NearCallBack来过滤碰撞 (13)5.4. 从btCollisionDispatcher派生你自己的类 (13)6. 刚体动力学 (13)6.1. 简介 (13)6.2. 静态、动态和运动学上的刚体 (13)6.3. 质心在虚拟世界中的变换 (14)6.4. 什么是运动状态(MotionStates) (14)6.5. 插值 (14)6.6. 如何使用MothonStates (14)6.7. DefaultMotionState介绍 (15)6.8. Ogre3D的MotionState示例 (15)6.9. 运动体 (16)6.10. 仿真帧和插值帧 (16)7. 约束 (17)7.1. 点对点约束 (17)7.2. 铰链约束 (17)7.3. 滑动约束 (18)7.4. 锥扭约束 (18)7.5. 通用6自由度约束 (18)8.1. Action接口 (19)8.2. 车辆投射 (19)8.3. 角色控制器 (19)9. 软体动力学 (19)9.1. 简介 (19)9.2. 从三角网格创建软体 (19)9.3. 碰撞集群 (20)9.4. 给软体添加作用力 (20)9.5. 软体约束 (20)1.简介1.1.类库描述Bullet物理引擎是开源的,专业的集刚体、软体和碰撞检测于一身的动力学类库。
给定平面上的n个点,求距离最近的两个点的距离。c语言
给定平面上的n个点,求距离最近的两个点的距离。
c语言给定平面上的n个点,我们需要找到距离最近的两个点之间的距离。
这是一个常见的计算几何问题,在计算机科学中有很多有效的算法可以解决这个问题。
在本文中,我们将使用C语言来实现一个简单但有效的算法来求解这个问题。
首先,我们需要定义一个点的结构体来表示平面上的点。
点结构体可以包含两个成员变量,分别表示x和y坐标。
cstruct point {double x;double y;};接下来,我们需要实现一个计算两点之间距离的函数。
根据欧几里得距离公式,两点之间的距离可以通过下列公式计算得出:cdouble distance(struct point p1, struct point p2) {double dx = p1.x - p2.x;double dy = p1.y - p2.y;return sqrt(dx * dx + dy * dy);}现在我们已经有了计算距离的函数,接下来我们将介绍一种简单但有效的算法来找到距离最近的两个点。
我们首先需要将所有的点按照x坐标进行排序。
使用快速排序算法可以很高效地实现这一步。
cvoid quickSort(struct point arr[], int low, int high) {if (low < high) {int pivot = partition(arr, low, high);quickSort(arr, low, pivot - 1);quickSort(arr, pivot + 1, high);}}int partition(struct point arr[], int low, int high) {struct point pivot = arr[high];int i = (low - 1);for (int j = low; j <= high - 1; j++) {if (arr[j].x <= pivot.x) {i++;swap(&arr[i], &arr[j]);}}swap(&arr[i + 1], &arr[high]);return (i + 1);}void swap(struct point* a, struct point* b) {struct point temp = *a;*a = *b;*b = temp;}在完成排序之后,我们可以使用分治算法来找到最近的两个点。
最近点对算法
最近点对算法1. 简介最近点对算法(Closest Pair Algorithm)是一种用于找到平面上最近的两个点的算法。
该算法可以在给定一组点的情况下,找到距离最近的两个点,并计算出它们之间的距离。
最近点对问题在计算几何学、图像处理、数据挖掘等领域中具有广泛应用。
例如,在地理信息系统中,可以使用最近点对算法来查找距离最近的两个地理位置;在机器视觉中,可以使用该算法来寻找图像中距离最接近的两个特征点。
2. 算法思想最近点对算法采用分治策略,将问题划分为多个子问题,并通过递归求解子问题来得到整体解。
其基本思想可以概括为以下步骤:1.将所有点按照横坐标进行排序。
2.将排序后的点集平均划分为左右两部分,分别称为P_left和P_right。
3.分别在P_left和P_right中递归求解最近点对。
4.在左右两部分求得的最近点对中,选择距离更小的那一对作为候选解。
5.在区间[P_left[-1].x, P_right[0].x]内,查找可能的更近点对。
6.比较候选解与新找到的更近点对,选择距离更小的那一对作为最终解。
3. 算法实现3.1 数据结构在实现最近点对算法时,需要定义合适的数据结构来表示点。
常见的表示方法是使用二维数组或类对象。
以下是使用类对象来表示点的示例代码:class Point:def __init__(self, x, y):self.x = xself.y = y3.2 算法步骤3.2.1 排序首先,将所有点按照横坐标进行排序。
可以使用快速排序或归并排序等算法来实现排序功能。
def sort_points(points):# 使用快速排序按照横坐标进行排序# ...3.2.2 分治求解将排序后的点集平均划分为左右两部分,并递归求解最近点对。
def closest_pair(points):n = len(points)# 如果点集中只有两个点,则直接返回这两个点和它们之间的距离if n == 2:return points, distance(points[0], points[1])# 如果点集中只有三个点,则直接计算出最近点对if n == 3:d1 = distance(points[0], points[1])d2 = distance(points[0], points[2])d3 = distance(points[1], points[2])if d1 <= d2 and d1 <= d3:return [points[0], points[1]], d1elif d2 <= d1 and d2 <= d3:return [points[0], points[2]], d2else:return [points[1], points[2]], d3# 将点集平均划分为左右两部分mid = n // 2P_left = points[:mid]P_right = points[mid:]# 分别在左右两部分递归求解最近点对closest_pair_left = closest_pair(P_left)closest_pair_right = closest_pair(P_right)# 在左右两部分求得的最近点对中,选择距离更小的那一对作为候选解if closest_pair_left[1] < closest_pair_right[1]:min_pair, min_distance = closest_pair_leftelse:min_pair, min_distance = closest_pair_right3.2.3 查找更近点对在区间[P_left[-1].x, P_right[0].x]内,查找可能的更近点对。
点到曲线的最短距离公式
点到曲线的最短距离公式在数学中,点到曲线的最短距离可以通过计算点到曲线上某一点的垂直距离来实现。
首先,我们需要确定曲线的方程,然后找到曲线上离点最近的点。
接下来,我们可以计算点到该点的距离,这个距离就是点到曲线的最短距离。
对于平面曲线,我们可以用曲线的方程来表示它。
例如,对于一条抛物线,可以用二次方程来表示。
假设我们有一个点P(x, y),我们想要计算它到抛物线y = ax^2 + bx + c的最短距离。
为了简化计算,我们可以将问题转化为求解点P到曲线上某一点Q的最短距离。
为了找到离点P最近的点Q,我们可以通过计算点P到曲线的切线与曲线的交点来实现。
切线是曲线上某一点的切线,它与曲线相切于该点。
我们可以通过求解切线与曲线的交点来找到离点P最近的点Q。
然后,我们可以计算点P到点Q的距离,这个距离就是点P 到抛物线的最短距离。
对于三维空间中的曲线,我们可以用参数方程来表示。
参数方程是将曲线上的点表示为参数的函数。
例如,对于一条螺旋线,可以用参数方程x = a cos(t), y = a sin(t), z = bt来表示,其中a和b是常数。
在三维空间中计算点到曲线的最短距离更加复杂,因为我们需要考虑曲线的方向和曲线的曲率。
一种常用的方法是通过计算点到曲线切线的垂直距离来近似计算点到曲线的最短距离。
我们可以通过求解点P到曲线上某一点Q的向量投影来找到离点P最近的点Q。
然后,我们可以计算点P到点Q的距离,这个距离就是点P到曲线的最短距离的一个近似值。
除了上述方法,还有其他一些数值方法可以用来计算点到曲线的最短距离。
例如,我们可以使用迭代算法来逼近最短距离。
这种方法在计算机图形学中经常使用,它通过不断迭代来逼近点到曲线的最短距离。
点到曲线的最短距离是一个重要的数学问题,它在实际应用中有着广泛的应用。
通过计算点到曲线上某一点的垂直距离,我们可以找到离点最近的点,并计算出点到曲线的最短距离。
无论是在几何学、物理学还是工程学中,点到曲线的最短距离都有着重要的应用。
求两组点之间的最近点对实验总结
求两组点之间的最近点对实验总结在计算几何学和算法设计中,求两组点之间的最近点对是一个重要且常见的问题。
在这篇文章中,我将从简到繁地探讨这个主题,深入分析求解最近点对的算法,并进行实验总结,以便读者能更深入地理解这一概念。
一、什么是最近点对问题?最近点对问题是指在一个平面上给定n个点,要求在这些点中找到距离最近的两个点。
这个问题在实际中有着广泛的应用,比如计算机视觉中的物体识别、无人驾驶车辆的障碍物检测等都涉及到最近点对的计算。
设计高效的算法来解决最近点对问题具有重要意义。
二、最近点对的暴力解法最简单的方法是通过遍历所有点对,计算它们之间的距离,并找到最小值。
这种暴力解法的时间复杂度为O(n^2),空间复杂度为O(1),虽然简单易懂,但对于大规模的数据集来说效率较低。
三、分治法解决最近点对问题分治法是解决最近点对问题的常见方法,其基本思想是将点集分成两个子集,分别求解最近点对,然后再找出整个点集的最近点对。
在这个过程中需要用到分治、筛选和合并三个步骤。
具体算法流程如下:1. 将点集按照x坐标排序,找到中间线将点集分成左右两个子集。
2. 递归求解左右子集的最近点对。
3. 筛选出距离中线距离小于当前最近距离的点,将它们按照y坐标排序。
4. 在筛选后的点集中,以每个点为中心,向上下各取6个点。
5. 计算这些点之间的距离,更新最近距离。
6. 合并左右子集的结果,得到最终的最近点对。
使用分治法解决最近点对问题的时间复杂度为O(nlogn),效率较高,适用于大规模数据集。
四、实验总结及个人观点在进行最近点对的实验过程中,我发现分治法在处理大规模数据集时具有明显的优势,其算法设计合理、程序实现简单高效。
对于中等规模的数据集,暴力解法也能够得到较好的结果,但对于大规模数据集来说效率明显低于分治法。
我个人认为在解决最近点对问题时,应优先考虑使用分治法,并且可以根据数据规模选择不同的算法来达到更高的效率。
总结来说,求两组点之间的最近点对是一个重要且常见的问题,在实际应用中具有广泛的意义。
excel bullet point 格式
excel bullet point 格式Excel是一款广泛使用的电子表格软件,特别是在商业和财务领域。
在Excel中,我们可以使用bullets(子点)来高亮显示列表或任务的关键点。
列表可以包含文本、数字、图标和其他Excel对象。
在本文中,我们将详细讨论Excel bullet point格式,包括如何添加、编辑、删除、格式化和自定义bullets。
如何添加bullet points在Excel中添加bullets很容易。
你只需要遵循以下步骤:1.选择您要添加bullet point的单元格(单元格可能包含文本、数字或其他内容)。
2.点击右键,选择“格式单元格”选项卡。
3.在“数字”选项卡中,选择“文本”。
4.在“文本”对话框中,选择“带有bullet的列表”。
5.在弹出的对话框中,你可以选择想要的bullet类型,例如实心圆、空心圆、方框等。
6.点击“确定”按钮,bullet points就会出现在所选单元格中。
如何编辑bullet points一旦你添加了bullet points,你可以对它们进行编辑。
以下是一些编辑bullet points的方法:1.改变bullet的大小和颜色:你可以选择bullet并更改它的字体大小和颜色,在“字体”选项卡下,你可以设置大小、颜色、字体等。
2.更改文本的缩进:当你添加bullet points时,文本可能会紧贴着bullet。
你可以更改文本的缩进,以使文本距离bullet更远,在“对齐”选项卡下,你可以将文本缩进到任意距离。
3.更改bullet的间距:你可以使用“间距”选项来调整bullet之间的距离。
如何删除bullet points如果你想删除bullet points,想必你也可以很容易地实现,具体步骤如下:1.在要删除的单元格中,选择bullet points。
2.按下“Delete”键或右键单击选择“删除”选项。
3.如果你要删除整个列表,可以选择“整个单元格列表”选项。
快速近似最近邻算法

快速近似最近邻算法最近邻算法(Nearest Neighbor Algorithm)是一种常用的机器学习算法,用于分类和回归问题。
它的基本思想是找到与目标样本最接近的训练样本,并将其标签作为目标样本的预测结果。
但是,当训练集非常大时,最近邻算法的计算复杂度会变得非常高,这就需要使用快速近似最近邻算法来提高算法的效率。
快速近似最近邻算法(Approximate Nearest Neighbor Algorithm)通过牺牲一定的精确性来换取更高的计算效率。
它的核心思想是利用数据结构或近似算法来降低搜索空间,从而减少计算量。
下面介绍几种常用的快速近似最近邻算法。
1. 局部敏感哈希(Locality Sensitive Hashing,简称LSH)是一种常用的快速近似最近邻算法。
它的基本原理是将高维数据映射到低维空间,通过哈希函数将相似的数据映射到相同的桶中,从而加快相似度搜索的速度。
LSH算法可以在保证一定的查询精度的同时,大大减少计算量,适用于大规模数据集的近似最近邻搜索。
2. 近似最近邻树(Approximate Nearest Neighbor Tree,简称ANN Tree)是一种基于树结构的快速近似最近邻算法。
它通过构建一棵多层的树结构,将训练样本划分到不同的叶节点中,并记录每个叶节点的中心点。
在查询时,通过比较查询样本与每个叶节点中心点的距离,可以快速确定查询样本的搜索路径,从而提高搜索效率。
3. 近似最近邻图(Approximate Nearest Neighbor Graph,简称ANN Graph)是一种基于图结构的快速近似最近邻算法。
它通过构建一个图结构来表示训练样本之间的相似度关系,从而实现最近邻的快速搜索。
在构建ANN图时,可以使用不同的近似算法,如k-means算法或最大最小平均聚类算法,来降低计算复杂度。
4. 近似最近邻线性搜索(Approximate Nearest Neighbor Linear Search)是一种简单但有效的快速近似最近邻算法。
点云间距计算算法
点云间距计算算法全文共四篇示例,供读者参考第一篇示例:点云是由大量的离散点组成的三维数据集合,通常用来表示物体表面的形状和结构。
在许多领域,如机器人导航、三维重建、虚拟现实等,点云数据都扮演着重要的角色。
点云数据通常密集且混乱,需要一些算法来计算点云之间的距离,以便更好地分析和处理这些数据。
点云间距计算算法是指计算点云数据中各个点之间的距离的方法。
在实际应用中,点云数据通常包含大量的点,因此需要高效的算法来计算这些点之间的距离。
常用的点云间距计算算法有最近点计算算法、K最近邻算法、RANSAC算法等。
最近点计算算法是最简单的点云间距计算算法之一,它通过计算每个点与其最近的邻居点之间的距离来获取点云数据的局部结构信息。
该算法的计算复杂度为O(n^2),其中n为点云数据的点的数量。
虽然最近点计算算法简单高效,但在处理大规模点云数据时性能有限。
RANSAC算法是一种基于随机采样的点云间距计算算法,它通过随机选择一组点来拟合模型,并计算其他点到该模型的距离,然后根据距离阈值筛选出符合条件的点。
RANSAC算法在点云配准、平面拟合等方面有着广泛的应用,但在处理大规模点云数据时性能较差。
除了上述算法外,还有一些基于机器学习的点云间距计算算法,如基于深度学习的点云特征学习、点云配对等。
这些算法通过学习点云数据的特征表示,实现更高效、更准确的点云间距计算。
虽然这些算法在处理大规模点云数据时性能较好,但需要大量的标注数据和计算资源。
在实际应用中,选择合适的点云间距计算算法需要根据具体场景和需求来决定。
在处理大规模点云数据时,可以选择K最近邻算法等高效算法;在需要对点云数据进行进一步分析和处理时,可以选择基于机器学习的算法。
研究和开发更高效的点云间距计算算法,将有助于提高点云数据的处理效率和质量,推动点云技术在各个领域的发展和应用。
【字数不足,继续】总结而言,点云间距计算算法在点云数据处理中起着至关重要的作用。
选择合适的点云间距计算算法可以更好地分析和处理点云数据,实现更高效、更精确的结果。
icp迭代最近点原理
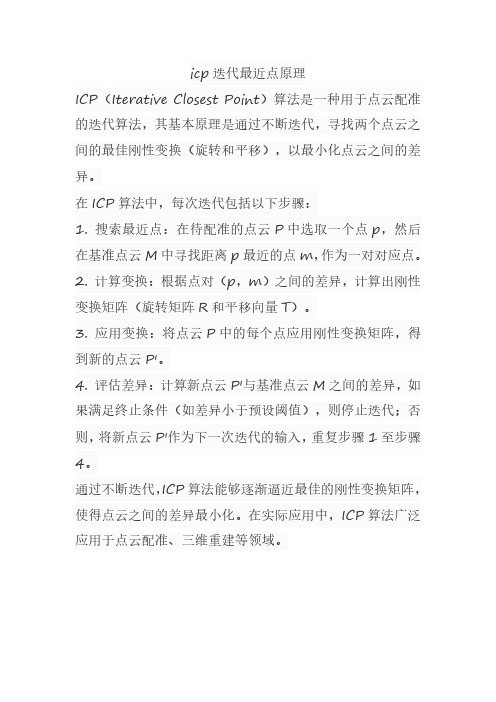
icp迭代最近点原理
ICP(Iterative Closest Point)算法是一种用于点云配准的迭代算法,其基本原理是通过不断迭代,寻找两个点云之间的最佳刚性变换(旋转和平移),以最小化点云之间的差异。
在ICP算法中,每次迭代包括以下步骤:
1.搜索最近点:在待配准的点云P中选取一个点p,然后在基准点云M中寻找距离p最近的点m,作为一对对应点。
2.计算变换:根据点对(p,m)之间的差异,计算出刚性变换矩阵(旋转矩阵R和平移向量T)。
3.应用变换:将点云P中的每个点应用刚性变换矩阵,得到新的点云P'。
4.评估差异:计算新点云P'与基准点云M之间的差异,如果满足终止条件(如差异小于预设阈值),则停止迭代;否则,将新点云P'作为下一次迭代的输入,重复步骤1至步骤4。
通过不断迭代,ICP算法能够逐渐逼近最佳的刚性变换矩阵,使得点云之间的差异最小化。
在实际应用中,ICP算法广泛应用于点云配准、三维重建等领域。
二分法计算点集最近的两个点及距离
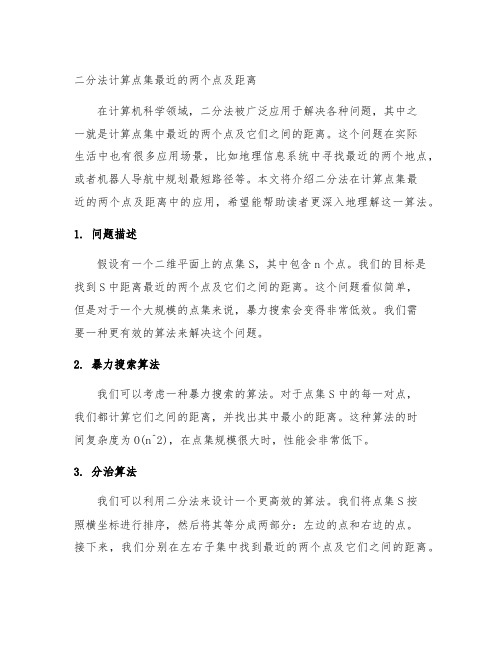
二分法计算点集最近的两个点及距离在计算机科学领域,二分法被广泛应用于解决各种问题,其中之一就是计算点集中最近的两个点及它们之间的距离。
这个问题在实际生活中也有很多应用场景,比如地理信息系统中寻找最近的两个地点,或者机器人导航中规划最短路径等。
本文将介绍二分法在计算点集最近的两个点及距离中的应用,希望能帮助读者更深入地理解这一算法。
1. 问题描述假设有一个二维平面上的点集S,其中包含n个点。
我们的目标是找到S中距离最近的两个点及它们之间的距离。
这个问题看似简单,但是对于一个大规模的点集来说,暴力搜索会变得非常低效。
我们需要一种更有效的算法来解决这个问题。
2. 暴力搜索算法我们可以考虑一种暴力搜索的算法。
对于点集S中的每一对点,我们都计算它们之间的距离,并找出其中最小的距离。
这种算法的时间复杂度为O(n^2),在点集规模很大时,性能会非常低下。
3. 分治算法我们可以利用二分法来设计一个更高效的算法。
我们将点集S按照横坐标进行排序,然后将其等分成两部分:左边的点和右边的点。
接下来,我们分别在左右子集中找到最近的两个点及它们之间的距离。
假设左右子集中最近的两个点分别为p1和p2,我们分别计算它们之间的距离为d。
那么,我们需要计算跨越左右两个子集的最近距离。
4. 跨越子集的最近距离我们将以中线为界限的一个带状区域定义为可能存在最近点对的区域。
在这个带状区域内,任意两点之间的距离都不会超过d。
我们只需要考虑在带状区域内的点对。
并且我们可以利用这个性质来优化查找过程。
5. 算法实现# 伪代码def closestPair(S):if len(S) < 2:return NoneS.sort(key=lambda x: x[0]) # 按照横坐标排序return closestPairRec(S, 0, len(S)-1)def closestPairRec(S, low, high):if high - low <= 3:return bruteForce(S[low:high+1]) # 暴力搜索mid = (low + high) // 2leftPair = closestPairRec(S, low, mid) # 左子集最近点对rightPair = closestPairRec(S, mid+1, high) # 右子集最近点对d = min(leftPair[1], rightPair[1])midStrip = [point for point in S[low:high] if abs(point[0] - S[mid][0]) < d] # 带状区域内的点return min(leftPair, rightPair, closestSplitPair(midStrip, d)) # 返回最近点对def closestSplitPair(S, d):S.sort(key=lambda x: x[1]) # 按照纵坐标排序bestPair = (None, float('inf'))for i in range(len(S)):for j in range(i+1, len(S)):if S[j][1] - S[i][1] > d:breakdistance = euclideanDistance(S[i], S[j])if distance < bestPair[1]:bestPair = (S[i], S[j], distance)return bestPair6. 总结与回顾通过上述算法,我们可以在O(nlogn)的时间复杂度内找到点集中最近的两个点及它们之间的距禞。
unity 点到线段的最短距离
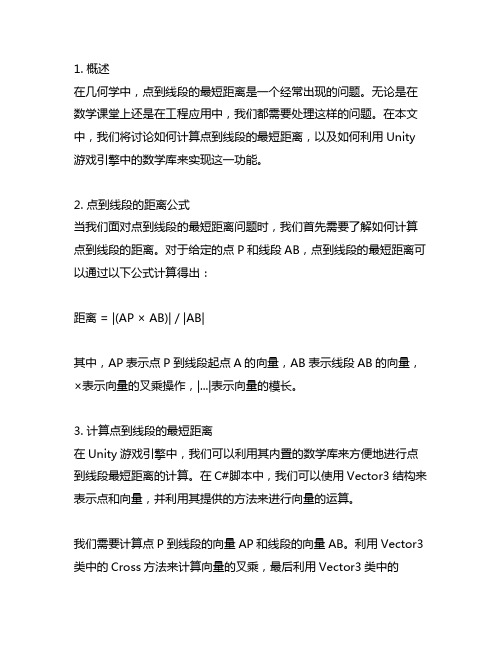
1. 概述在几何学中,点到线段的最短距离是一个经常出现的问题。
无论是在数学课堂上还是在工程应用中,我们都需要处理这样的问题。
在本文中,我们将讨论如何计算点到线段的最短距离,以及如何利用Unity 游戏引擎中的数学库来实现这一功能。
2. 点到线段的距离公式当我们面对点到线段的最短距离问题时,我们首先需要了解如何计算点到线段的距离。
对于给定的点P和线段AB,点到线段的最短距离可以通过以下公式计算得出:距离= |(AP × AB)| / |AB|其中,AP表示点P到线段起点A的向量,AB表示线段AB的向量,×表示向量的叉乘操作,|...|表示向量的模长。
3. 计算点到线段的最短距离在Unity游戏引擎中,我们可以利用其内置的数学库来方便地进行点到线段最短距离的计算。
在C#脚本中,我们可以使用Vector3结构来表示点和向量,并利用其提供的方法来进行向量的运算。
我们需要计算点P到线段的向量AP和线段的向量AB。
利用Vector3类中的Cross方法来计算向量的叉乘,最后利用Vector3类中的magnitude方法来计算向量的模长。
通过这些操作,我们可以在Unity中轻松地实现点到线段最短距离的计算。
4. 示例代码下面给出一个在Unity中实现点到线段最短距离计算的示例代码:```csharpusing UnityEngine;public class PointToSegmentDistance : MonoBehaviour {public Transform pointP;public Transform pointA;public Transform pointB;void Start(){Vector3 AP = pointP.position - pointA.position;Vector3 AB = pointB.position - pointA.position;float distance = Vector3.Cross(AP, AB).magnitude / AB.magnitude;Debug.Log("The shortest distance from point P to segment AB is: " + distance);}}```在这段示例代码中,我们首先获取点P和线段AB的Transform组件,并通过其position属性来获取它们的位置向量。
qt最近邻算法
qt最近邻算法
Qt是一种用于开发GUI应用程序的跨平台C++库。
最近邻算法(Nearest Neighbor Algorithm)是一种常见的分类或回归算法,它基于数据点之间的距离来决定最近邻。
在Qt中实现最近邻算法,通常需要以下步骤:
1. 数据准备:首先,你需要有一组数据,可以是二维或更高维度的。
这些数据通常存储在数组或列表中。
2. 计算距离:对于给定的输入数据点,你需要计算它与已知数据点之间的距离。
常用的距离度量标准包括欧氏距离和曼哈顿距离。
3. 找到最近邻:基于计算出的距离,选择距离最小的数据点作为最近邻。
4. 应用算法:根据最近邻的类别或值,进行分类或回归预测。
5. Qt界面实现:在Qt中,你可以使用QTableWidget或QTableView来显示数据,并使用QPushButton或其他控件来触发算法的执行。
6. 结果展示:将算法的结果展示在界面上,例如在QTableWidget中更新相应的单元格。
需要注意的是,Qt主要用于GUI开发,而不是专门用于机器学习或数据处理。
因此,实现复杂的机器学习算法可能需要结合其他库或工具,例如使用
Python的Scikit-learn库来实现最近邻算法,并通过Qt的Python绑定(如PyQt或PySide)来集成到Qt应用程序中。
如果你希望在Qt应用程序中实现机器学习功能,建议查看专门为机器学习设计的Qt绑定或框架,如MLTK(Machine Learning Toolkit)。
离线最近的点 公式

离线最近的点公式
离线最近点公式是一种通过预处理以提高查询速度的算法,它可以在二维平面上快速找到输入点集中的某一点与目标点最近的距离和位置。
该算法的核心思想是将二维平面划分成多个小区域,并对每个小区域预处理出其中最近的点,在查询时只需查找目标点所在的小区域和周边的若干个小区域,找出其中最近的点。
离线最近点公式的具体实现方法有很多种,常用的包括 KD 树、四叉树和 R 树等数据结构。
无论使用哪种方法,其复杂度均为
O(logn),非常适用于需要实时查询距离的应用场景,例如地图导航、虚拟现实游戏等。
总之,离线最近点公式是一种高效、可靠的算法,可以快速计算出输入点集中任意两点之间的距离,对于涉及到大量点集计算距离的场景具有很大的实际意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Bullet中最近点距离算法在Bullet中,通过类btVoronoiSimplexSolve实现了1到4个顶点的单纯形到原点的距离计算,该类可以在GJK算法中调用,用以代替Johnson distance algorithm[我们前篇文章原点到四面体的距离,实际上就是介绍该算法]算法。
本文我们研究bullet中如何实现该类以及该类的用法。
首先我们看看顶点在btVoronoiSimplexSolve中是什么存储的:用到了三个变量:btVector3 m_simplexVectorW[VORONOI_SIMPLEX_MAX_VERTS];btVector3 m_simplexPointsP[VORONOI_SIMPLEX_MAX_VERTS];btVector3 m_simplexPointsQ[VORONOI_SIMPLEX_MAX_VERTS];m_simplexVectorW中存放的是单纯形的顶点,m_simplexVectorP,m_simplexVectorQ中存放的是两个物体中和单纯形顶点m_simplexVectorW相对应的顶点,注意,这儿单纯形表示是明可夫斯基差形状中的单纯形,所以m_simplexVectorP,m_simplexVectorQ就是表示两个物体中的顶点,并且m_simplexVectorP -m_simplexVectorQ = m_simplexVectorW。
(都是世界坐标系中的值)该类中计算机单纯形到原点距离通过函数closest计算,该函数又调用函数updateClosestVectorAndPoints具体实施。
下面我看看updateClosestVectorAndPoints中的代码:1、一个顶点的单纯形1case1://一个顶点2{3m_cachedP1 = m_simplexPointsP[0];4m_cachedP2 = m_simplexPointsQ[0];5m_cachedV = m_cachedP1-m_cachedP2; //== m_simplexVe ctorW[0]6m_cachedBC.reset();7m_cachedBC.setBarycentricCoordinates(btScalar(1.),b tScalar(0.),btScalar(0.),btScalar(0.)); //只使用了第一个顶点8m_cachedValidClosest = m_cachedBC.isValid();9break;10};单纯形是一个顶点的情况下,直接返回m_simplexVectorW(m_simplexVectorP - m_simplexVectorQ)顶点坐标。
单纯形到原点的距离放在向量m_cachedV中。
2、两个顶点的单纯形1case2://两个顶点2{3//closest point origin from line segment4const btVector3& from = m_simplexVectorW[0];5const btVector3& to = m_simplexVectorW[1];6btVector3 nearest;78btVector3 p (btScalar(0.),btScalar(0.),btScalar (0.));9btVector3 diff = p - from;1btVector3 v = to - from;11btScalar t = v.dot(diff);1213if (t >0) {14btScalar dotVV = v.dot(v);15if (t < dotVV) {16t /= dotVV;17diff -= t*v;1 8m_cachedBC.m_edVertexA = true;1 9m_cachedBC.m_edVertexB = true;20} else {21t =1;22diff -= v;23//reduce to 1 point2 4m_cachedBC.m_edVertexB = true;2}26} else27{28t =0;29//reduce to 1 point3 0m_cachedBC.m_edVertexA =tru e;31}32m_cachedBC.setBarycentricCoordinates(1-t,t);33nearest = from + t*v;343 5m_cachedP1 = m_simplexPointsP[0] + t * (m_simpl exPointsP[1] - m_simplexPointsP[0]);3 6m_cachedP2 = m_simplexPointsQ[0] + t * (m_simpl exPointsQ[1] - m_simplexPointsQ[0]);37m_cachedV = m_cachedP1 - m_cachedP2;383 9reduceVertices(m_cachedBC.m_usedVertices); //移去没有用的顶点,对最近点没有贡献。
这个在求两个物体最近距离时候要用到,没用的点从单纯形中去掉41m_cachedValidClosest = m_cachedBC.isValid();42break;43}44两个顶点的单纯形就是求原点到线段的距离。
如图1所示,在a的情况下,返回t点,在b的情况下返回to点,在c的情况下返回from。
【bullet 代码,原来挺乱的】m_cachedBC.setBarycentricCoordinates(1-t,t),设置最近点的重心坐标。
图1 原点到线段的距离3、三个顶点的单纯形求空间点到空间三角形最近距离(以及三角形上的最近距离点)的算法主要在函数closestPtPointTriangle中。
例如对于顶点a,如果原点位于它的Voronoi区域,则a点就是三角形到原点的最近距离。
代码如下:1 // Check if P in vertex region outside A2 btVector3 ab = b - a;3 btVector3 ac = c - a;4 btVector3 ap = p - a;5 btScalar d1 = ab.dot(ap);6 btScalar d2 = ac.dot(ap);7 if (d1 <= btScalar(0.0) && d2 <= btScalar(0.0))8 {9 result.m_closestPointOnSimplex = a;10 result.m_edVertexA =true;11 result.setBarycentricCoordinates(1,0,0);12 return true;// a; // barycentric coordinates (1,0,0)13 }接下来判断P是否在b点的Voronoi区域(代码省略),然后判断线段p是否在ab的Voronoi区域,代码如下:1 // Check if P in edge region of AB, if so return projection ofP onto AB2 btScalar vc = d1*d4 - d3*d2;3 //=(p-a).(((p-a)x(p-b))x(c-a)4 if (vc <= btScalar(0.0) && d1 >= btScalar(0.0) && d3 <= btScalar(0.0)) {5 btScalar v = d1 / (d1 - d3);6 result.m_closestPointOnSimplex = a + v * ab;7 result.m_edVertexA =true;8 result.m_edVertexB =true;9 result.setBarycentricCoordinates(1-v,v,0);10return true;11//return a + v * ab; // barycentric coordinates (1-v,v,0)12}注意:d1*d4-d3*d2 = (c-a).(((b-a)x(p-b))x(p-a)接下来是点c,线段ac,bc,代码类似,不再贴出来。
如果以上的测试都为false,则P 点位于三角形内。
4、四个顶点的单纯形主要通过函数closestPtPointTetrahedron计算最短距离。
在该函数中,考虑到了四面体退化的问题,就是四个点在一个平面上,此时没有求最短距离,否则的话,分别对四个平面求到原点最短距离,求出其中最短的距离即为结果。
因为代码比较长,这儿就不贴出来了。
/s/blog_61feffe10100mxnx.html。