车载CAN总线数据采集和ECU标定系统
汽车ECU标定系统CAN驱动模块的实现_冯辉宗
技术创新中文核心期刊《微计算机信息》(嵌入式与SOC)2008年第24卷第4-2期360元/年邮局订阅号:82-946《现场总线技术应用200例》汽车电子汽车ECU标定系统CAN驱动模块的实现CANDriverRealizationofAutomobileECUCalibrationSystem(重庆邮电大学汽车电子与嵌入式系统研究所)冯辉宗张彧蒋建春陈培然FENGHui-zongZHANGYuJIANGJian-chunCHENPei-ran摘要:针对汽车ECU标定系统对通信速度、可靠性要求比较高的特点,提出了一种基于环形缓冲区的CAN驱动模块。
该驱动模块利用一个环形缓冲区作为收发消息的中介,能够很好的解决由于CAN通信速度较快,而产生的通信中断、数据丢失等问题。
经过反复多次的调试,驱动模块在标定系统中运行稳定可靠。
关键词:标定;CAN总线;环形缓冲区中图分类号:TP311.5文献标识码:BAbstract:nviewofAutomobileECUCalibrationSystem’shighdemandoncommunicationspeedandreliability,thispaperproposedaCANdrivermoduebasedonringbuffer.Thisdrivermoduleusesaringbufferasaintermediumthatthemessagesendorget.Itsolvestheproblemofcommunicationterminated,messagelostasaresultofhighcommunicationspeed.Withdebuggingmanytimes,CANmodulerunwellinAutomobileECUCalibrationSystem.KeyWords:Calibration;CANBus;RingBuffer文章编号:1008-0570(2008)04-2-0248-031前言标定是指根据整车的各种性能要求(如动力性、经济性、排放及辅助功能等),来调整、优化和确定整车上各ECU(如发动机、AT等各子系统ECU)控制参数的控制算法。
商用车车载ECU电子数据标定
商用车车载ECU电子数据标定杨京鸿;刘发丽【摘要】本文从ECU电子数据的构成、ECU电子数据匹配标定的原理着手,阐述了一种针对商用车车载ECU电子数据标定的设计、生产、售后智能化集成以及一套在生产线上实现工业化的方法.对ECU电子数据进行模块化拆分,对模块化数据与整车配置建立关联关系的从而配置化车辆ECU电子数据文件;采用EPI标定硬件完成总成及整车在生产环节ECU电子数据标定的过程自动化;搭建企业内部的车辆EOL电子数据平台实现ECU电子数据的智能化管理,具有条码扫描、输入和测试等功能确保ECU电子数据批量标定过程准确无误.【期刊名称】《汽车科技》【年(卷),期】2015(000)006【总页数】6页(P22-27)【关键词】车载ECU;数据标定;模块化;自动化;智能化【作者】杨京鸿;刘发丽【作者单位】东风商用车有限公司,十堰442001;东风商用车有限公司,十堰442001【正文语种】中文【中图分类】U469.051 前言车载ECU的功用是根据其内存的程序和数据对各种传感器输入的信号进行处理、判断、运算,然后向执行器输出指令。
ECU内部的控制策略是固定的,数千个运行代码组成电控功能ECU程序,但其包含的数千个自由参数是可调的,程序运行中需要读取ECU内存数据,车型配置的不同,对相应的参数进行调试优化,实现功能跳转,使得整车通过各种排放法规并满足各种驾驶性能指标。
例如可通过配置发动机MAP,调整和优化电控系统的运行参数(如发动机转数)等使发动机在最佳状态下工作,通过修改驾驶踏板曲线数据实现运动模式和普通模式的切换等等。
这一过程设计被称之为ECU匹配标定。
匹配标定是一个复杂的系统工程。
ECU由硬件、软件、电子数据组成,ECU电子数据被分类并存放在不同的区域,分类的方法由用户和ECU开发商共同来定义。
用户也可以对不同区域的数据设置不同的访问权限,以提高ECU电子数据的安全性。
ECU电子数据区包括零部件或车辆信息配置区域、动力参数区、排放参数区、故障诊断区等。
CAN总线简介(2024版)

驱动系统的高速CAN
• 驱动系统CAN主要连接对象是发动机控制器 (ECU)、ABS控制器、安全气囊控制器、 组合仪表等等,它们的基本特征相同,都是 控制与汽车行驶直接相关的系统。
倍。这种传统布线方法不能适应汽车的发展。CAN总线可有效减少线束,节省空间。
例如某车门-后视镜、摇窗机、门锁控制等的传统布线需要20-30 根,应用总线 CAN 则
只需要 2 根。(3)关联控制在一定事故下,需要对各ECU进行关联控制,而这是传统
汽车控制方法难以完成的表1 汽车部分电控单元数据发送、接受情况
• (5)直接通信距离最远可达10km(速率5Kbps以下)。
• (6)通信速率最高可达1MB/s(此时距离最长40m)。
• (7)节点数实际可达110个。
• (8)采用短帧结构,每一帧的有效字节数为8个。
• (9)每帧信息都有CRC校验及其他检错措施,数据出错 率极低。
• (10)通信介质可采用双绞线,同轴电缆和光导纤维,一 般采用廉价的双绞线即可,无特殊要求。
可靠性高:传输故障(不论是由内部还是外部引起 的)应能准确识别出来 使用方便:如果某一控制单元出现故障,其余系统 应尽可能保持原有功能,以便进行信息交换 数据密度大:所有控制单元在任一瞬时的信息状态 均相同,这样就使得两控制单元之间不会有数据偏 差。如果系统的某一处有故障,那么总线上所有连 接的元件都会得到通知。 数据传输快:连成网络的各元件之间的数据交换速 率必须很快,这样才能满足实时要求。
• (2)网络上的节点(信息)可分成不同的优先级,可以满 足不同的实时要求。
基于CAN总线的汽车ECU刷写方案蔡晓辉

基于CAN总线的汽车ECU刷写方案蔡晓辉发布时间:2021-09-09T02:57:48.609Z 来源:《中国科技人才》2021年第17期作者:蔡晓辉[导读] 随着汽车制造业和电子信息技术的迅猛发展,汽车ECU的功能日益丰富,汽车ECU刷写成为了汽车ECU的一个必备功能。
广西金奔腾车联网科技有限公司广西贵港 537100摘要:随着汽车制造业和电子信息技术的迅猛发展,汽车ECU的功能日益丰富,汽车ECU刷写成为了汽车ECU的一个必备功能。
针对汽车ECU的特点,提出一个基于CAN总线的汽车ECU刷写方案,介绍汽车ECU刷写的实现方法。
该设计不仅方便汽车行业研发人员开发和测试,还对汽车的升级与维护都有至关重要的作用。
关键字:汽车ECU CAN总线 UDS协议诊断服务前言半导体技术的不断进步,MCU内部集成的逻辑功能外设越来越多,存储器也越来越大。
消费者对于汽车节能型、舒适性、互联性、安全性的要求越来越高,更大大加速了汽车电子技术的发展,使得汽车具备了通信、办公和娱乐等丰富功能[1-3]。
为了适配各式各样的汽车,汽车ECU应用功能变得越来越丰富,这也使得汽车ECU的生产变得复杂。
为了匹配车辆的性能和车辆相应模块的功能,在开发车辆电子控制单元的过程中,需要经常调校参数以及更新软件。
传统方法需要将单个零件从整车上拆卸,并通过端口调试进行更新,这样会增加工作量并容易造成整车的损坏。
为了解决传统方法的繁琐问题,提出了一个基于CAN总线的汽车ECU刷写系统,并介绍汽车ECU刷写实现的方法。
1 相关概念1.1 BootLoader功能BootLoader是驻留在ECU非易失性存储器中的一段程序加载代码,每次ECU复位后,都会运行BootLoader[4]。
它会检查是否有来自通信总线的远程程序加载请求,如果有,则进入BootLoader模式,建立与程序下载端的总线通信并接收通信总线下载的应用程序、解析其地址和数据代码,运行NVM(非易失性存储器)驱动程序,将其编程到NVM中,并校验其完整性,从而完成应用程序更新。
ccp标定协议的daq详解
ccp标定协议的daq详解CCP标定协议的DAQ详解CCP(CAN Calibration Protocol)标定协议是一种用于汽车电子控制单元(ECU)标定和诊断的通信协议。
CCP协议通过数据采集器(DAQ)与ECU进行通信,实现参数的标定和监测。
本文将详细解释CCP标定协议中的数据采集器(DAQ)的工作原理和功能。
一、数据采集器(DAQ)的概述数据采集器(DAQ)是CCP标定协议中的重要组成部分,它负责与ECU进行通信,并将数据传输给标定工具进行处理。
数据采集器通常由硬件和软件两部分组成,硬件部分负责与ECU进行物理连接,而软件部分则负责控制数据的采集和传输。
二、数据采集器(DAQ)的工作原理1. 连接与通信:数据采集器通过物理接口(如CAN总线)与ECU进行连接。
一旦建立连接,数据采集器将发送请求命令给ECU,并接收ECU返回的响应数据。
数据采集器和ECU之间的通信遵循CCP协议规定的通信流程和数据格式。
2. 数据采集和传输:数据采集器在与ECU通信的过程中,会周期性地采集ECU内部的参数值,并将其保存在缓冲区中。
采集的数据可以是传感器的实时数据、ECU内部寄存器的数值等。
数据采集器还可以根据标定工具的要求,对特定的参数进行单点采集或连续采集。
3. 数据处理和传输:数据采集器将采集到的数据传输给标定工具进行处理。
传输方式可以是通过USB、以太网等物理接口,也可以通过无线方式进行传输。
传输的数据格式通常是CCP协议规定的格式,标定工具可以解析这些数据,并进行相应的处理和显示。
三、数据采集器(DAQ)的功能1. 参数标定:数据采集器可以通过CCP协议与ECU进行双向通信,实现对ECU内部参数的标定。
标定过程中,数据采集器向ECU发送标定命令,ECU根据命令执行相应的操作,并将标定结果返回给数据采集器。
标定工具可以通过数据采集器显示和修改参数的值,以达到优化ECU性能的目的。
2. 参数监测:数据采集器可以实时采集ECU内部的参数数值,并将其显示在标定工具的界面上。
ECU标定
汽车ECU 标定系统CCP 软件的实现摘要:CCP 协议是一种CAN 总线标定匹配协议。
本文简单介绍该协议的基本原理,以及一种基于该协议的汽车ECU 标定系统的实现方法。
最后,结合MC9S12DP256 芯片以及μC/OS-II操作系统,详细讨论了此标定系统的CCP 软件实现方法。
1 前言标定是指根据整车的各种性能要求(如动力性、经济性、排放及辅助功能等),来调整、优化和确定整车上各ECU(包括发动机和各子系统 ECU)的运行及控制参数的控制算法。
通过标定系统,能够很方便的读取 ECU 中的标定变量数据到标定平台,并可以对这些数据进行编辑修改,编辑后的数据又可以写入 ECU,从而达到修改 ECU 中标定参数的目的。
功能完善且灵活方便的标定软件对整个汽车ECU 控制系统的开发起到事半功倍的效果。
目前,一般的标定系统都是采用基于串行口的点对点的通信方式,这种通信方式具有很大的局限性,而且通信协议都不一样。
在这个ECU 系统中,将采用 CAN 总线的通信方式和CCP(CAN Calibration Protocol)协议。
2 CCP 协议简介1996 年6 月,欧洲ASAP 项目组发布了现行的2.0 版,它采用CAN 2.0B(11 位或29位ID)进行MCS(measurement and calibration system)与ECU 之间的通信[1]。
该协议具有通用性强,适用范围广的特点,无论对8 位低速带CAN 的控制器,还是32 位高速带CAN 的控制器,均可满足工作要求。
基于CCP 协议的ECU 标定采用主-从通信方式,主设备通过CAN 总线与多个从设备相连,其中主设备是测量标定系统MCS(Measurement CalibrationSystem),从设备是需要标定的ECU。
根据CCP 协议,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从机之间所有的数据传递均由主机控制,从机执行主机命令后返回包含命令响应值或错误代码等信息的报文。
CAN总线
前言20世纪90年代以来,汽车上由电子控制单元(ECU)控制的部件数量越来越多,例如:电子燃油喷射装置、防抱死制动装置、自动变速器、空气悬架等。
随着集成电路和单片机在汽车上的广泛应用,汽车上的ECU数量越来越多。
因此,一种新的概念—汽车控制局域网络CAN(Controller Area Network)的概念也就应运而生了。
CAN最早是由德国BOSCH公司为解决现代汽车机件中的控制模块与测试仪器之间的数据交换而开发的一种数据通信方式,CAN总线为汽车上各种电子设备、控制模块、测量仪器等提供了统一数据交换渠道,将是汽车电子技术发展的一个里程碑。
根据ISO(国际标准化组织)定义的通信协议,将世界各国不同的汽车生产厂商制定符合自身需要的各种专用总线统一到J1939通信协议上来,J1939协议是目前在大型汽车中应用最广泛的协议,它是美国SAE(Society of AutomotiveEngineer)组织维护和推广的。
目前北京公交使用车辆的欧Ⅲ、欧Ⅳ排放的发动机和自动变速箱的电控模块都遵循J1939通讯协议。
CAN总线应用在汽车上有很多优点:(1)数据共享(2)简化车身布线(3)取代以继电器为主体的常规逻辑电路(4)数据稳定可靠(5)有故障诊断和自动恢复能力(6)硬件方案的软件化实现(7)配置参数灵活。
在现代汽车设计中,CAN 已经成为必采用的技术。
学习、掌握、应用汽车局域网将会是今后汽车电控的关键技术。
下面是对CAN总线知识的一点肤浅理解,由于水平有限,没能全面地介绍各位所需的内容,其中内容有不妥之处,敬请各位批评指正。
CAN总线的概念和作用什么是CAN总线CAN全称为“Controller Area Network” ,即控制器局域网。
是国际上广泛应用的现场总线之一。
CAN总线是为解决现代汽车中众多电控模块(ECU)之间的数据交换而开发的一种串行数据总线。
名词解释:数据总线—数据总线是模块(ECU)之间运行数据的公共通道,它将各个功能部件的ECU连在一起,大量的数据信息和控制信息在总线上流动,实现各功能部件的ECU之间的信息交换。
汽车can总线工作原理及测量方法详解

汽车can总线工作原理及测量方法详解CAN总线的总体结构CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。
CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。
CB311CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构1、CAN控制器CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。
CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。
它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。
同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。
两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。
通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。
CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。
汽车ECU 标定系统CCP
汽车ECU 标定系统CCP 软件的实现关键字:CCP 协议CAN 总线标定系统摘要:CCP 协议是一种CAN 总线标定匹配协议。
本文简单介绍该协议的基本原理,以及一种基于该协议的汽车ECU 标定系统的实现方法。
最后,结合MC9S12DP256 芯片以及μC/OS-II操作系统,详细讨论了此标定系统的CCP 软件实现方法。
1 前言标定是指根据整车的各种性能要求(如动力性、经济性、排放及辅助功能等),来调整、优化和确定整车上各ECU(包括发动机和各子系统ECU)的运行及控制参数的控制算法。
通过标定系统,能够很方便的读取ECU 中的标定变量数据到标定平台,并可以对这些数据进行编辑修改,编辑后的数据又可以写入ECU,从而达到修改ECU 中标定参数的目的。
功能完善且灵活方便的标定软件对整个汽车ECU 控制系统的开发起到事半功倍的效果。
目前,一般的标定系统都是采用基于串行口的点对点的通信方式,这种通信方式具有很大的局限性,而且通信协议都不一样。
在这个ECU 系统中,将采用CAN 总线的通信方式和CCP(CAN Calibration Protocol)协议。
2 CCP 协议简介1996 年6 月,欧洲ASAP 项目组发布了现行的2.0 版,它采用CAN 2.0B(11 位或29位ID)进行MCS(measurement and calibration system)与ECU 之间的通信[1]。
该协议具有通用性强,适用范围广的特点,无论对8 位低速带CAN 的控制器,还是32 位高速带CAN 的控制器,均可满足工作要求。
基于CCP 协议的ECU 标定采用主-从通信方式,主设备通过CAN 总线与多个从设备相连,其中主设备是测量标定系统MCS(Measurement CalibrationSystem),从设备是需要标定的ECU。
根据CCP 协议,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从机之间所有的数据传递均由主机控制,从机执行主机命令后返回包含命令响应值或错误代码等信息的报文。
基于XCP协议的ECU标定

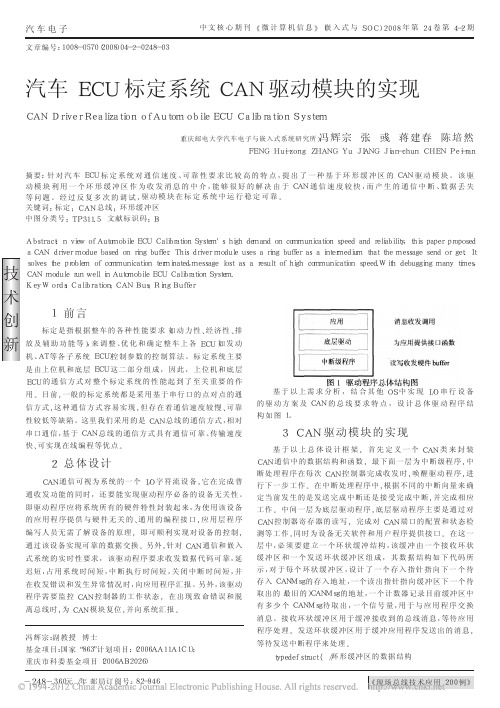
标定工具一般运行在 PC 机上,能够通过上下位机
之间的通信介质与发动机 ECU 实现数据信息交互,它
主要实现的模块及功能如图 6 所示。
算 ,再 由 ECU 把 计 算 结 果 以 控 制 信 号 的 形 式 发 送 至
CAN 总线网络上,由 CAN 总线把计算结果发送给 PC
标定工具,对传感器输出的数据进行实时采集和存储。
的灵活性和可扩展性。
为参数下载和在线编程两个阶段。
2.3 CAN 驱动通信
2.5 A2L 解析
在基于标定协议的测量与标定系统中,采用 XCP
数据包进行上位机与下位机之间的实际数据通信,XCP
数据包可以通过 CAN 数据包进行传输。在整个测量与
ASAM MCD-2MC 标准是一种对 ECU 中参数信息
监测 CAN 通信状态。通过手动编写包含命令码和数据
包,封装到 CAN 数据帧中发送到 ECU。在接收到 ECU
含了 ECU 中所有参数及其相关逻辑关系的文本文件,
是尽量保证各功能单元模块化、层次化,降低各功能模
被广泛应用于测量与标定系统中。A2L 文件是一份包
参数的读取、修改和保存等功能。标定系统的设计原则
采用规范化的方式描述参数信息,在 A2L 文件中,参数
块间的耦合度,方便后续对软件的升级和针对不同平台
数、总线参数、通信参数设置、硬件信息以及其他系统环
境参数等。在标定工作过程中,可通过标定工具对系统
Copyright©博看网. All Rights Reserved.
配套应用
参数进行配置,以实现对整个系统的管理和调节。所有
可配置的内容都可以被读取、保存并重新载入使用,以
实现系统的运行灵活性。
电控发动机ECU标定系统
电控发动机ECU标定系统摘要:汽车作为一种重要的交通工具,对社会生产力的提高和人们生活水平的改善起了重要的作用。
目前,许多国家都将汽车工业作为国民经济的支柱产业,随着汽车工业高速发展,这使得世界汽车保有量急剧增加。
基于 CAN 总线通讯的发动机电子控制单元标定系统。
标定系统包括标定系统软件、通信模块、待标定发动机电子控制单元和被测发动机,采用多主结构 CAN-bus 数据通信方式。
实现了上位机的标定表格设计,表格数据的整理,标准协议与自定义协议的转换接口的设计,基于协议的数据传输、在线烧录、采集、控制与诊断等功能。
关键词:电控发动机;标定;电子控制为了实现对发动机不同工况下的有效和良好的控制,必须对发动机电控单元进行匹配标定以确定各控制参数。
根据发动机不同的工作状态,对发动机基本点火提前角和喷射脉宽等进行MAP标定,向电控单元发出控制命令,按照在线修改的控制策略和一控制数据实施控制,是发动机电控系统中最高层控制软件。
某一型号发动机 ECU 内部有固定的控制算法和数千个可调的自由参数,对于不同的车型这些参数都需要通过发动机匹配标定进行优化,使得整车达到各种排放与驾驶性能指标。
依靠标定系统可以测量 ECU 内部的 MAP 以及动态实时数据,调整、优化和确定电控系统的运行参数、控制参数和各控制数学模型,来对ECU 中的参数进行全局优化,并最终确定这些参数的最佳值。
一、发动机标定的概念标定是根据发动机及整车的各项性能要求,如动力性、经济性、排放等,调整、优化和确定电控系统软件的运行参数(发动机转速、冷却水温)、控制参数(喷油脉宽、喷油提前角、点火提前角、EGR阀开度等)和各控制数学模型的整个过程。
一个制成的电控系统在匹配任何一种形式的发动机时,其软件中的控制程序和数学模型以及硬件模式基本确定,能不能使匹配的发动机在动力性、经济性和排放诸方面发挥最佳水平,将取决于能否获得软件中的最佳标定参数。
这一取得最佳标定参数的过程,就是匹配标定上作的主要任务,称之为标定。
发动机ECU匹配标定

发动机ECU匹配标定基本概述ECU部门的控制策略是固定的,但它包含的数千个自由参数是可调的。
针对不同的发动机和不同的车型,需要对这些参数进行调试和优化,使整车能够通过各种排放法规,满足各种驾驶性能指标。
这个调整过程称为发动机匹配校准。
匹配校准是一项复杂的系统工程。
包括台架测试、受控环境实验室测试、基于数学模型的标定计算、排放测试、功能验证测试等。
ECU标定系统的主要类型有:1)ATI V ISION CCP标定系统;2)ATI VISION M6校准系统; 3) ETAS INCA CCP校准系统;4)ETAS INCA ETK标定系统等。
但无论哪种标定系统都离不开软软件和硬件支持。
目前我司提供的软件平台主要有:ATI VISION、ETAS INCA,RA DiagRA MCD。
这三个软件各有特点,但都包含项目管理管理、校准、数据分析、校准比较等功能。
同时,我公司也为广大客户服务提供丰富的硬件支持模块:Therme-Scan SMB/CAN温度采集模块,Dual-Scan SMB/CAN温度模拟信号混合采集模块,AD-Scan SMB/CAN模拟信号数据采集模块,Thermo-Scan Minimcdule CAN温度采集微模块模块,AD-Scan Minimodul CAN 微型模拟信号数据采集工具,ATI EDAQ模块数据采集模块、朗达测量仪、博世宽量程氧传感器、IGTM-2000点火时间测试仪、SmartTach万能转速测试仪等。
此外,基于我们丰富的软硬件资源,我们还将构建完整的ECU匹配和校准平台根据客户的不同需求。
发动机ECU快速开发平台-NO-Hooks TechnologyNO-Hooks OnTarget 是最新的美国专利技术。
本产品是一款主要用于ECU策略软件开发和标定的软件工具。
该产品功能强大、价格低廉,并且不需要额外的硬件。
用户可以先使用 SimulinkR 建立新的控制策略开发和标定,EOBD(OBD II)开发、标定和功能验证,为车辆设置一定的工作状态或进行一定的重复测试。
车载CAN总线数据采集和ECU标定系统
U B, S T S U B— O—C N双 向数据 传输 。该 系统 同时具有 C N总线和 U B通信 的优 点 , A A S 具有 良好 的通信性 能 , 灵活的连接 特性 以及 高的 可靠性 , 可适用 于很 多场合 的数据 采集和标定。文 中以其在混合 动力 汽车 网络 中的应 用为例 , 阐述 了 系统
的 总 体 设 计 思 想及 其 层 次 结 构 , 给 出 系统 软 、 件 的 具 体 设 计 方案 。 并 硬 关 键 词 : A U B;aV E ; I IA; 据 采 集 和 标 定 。 C N; S L b IW N —V S 数
中图分类号 :P 3 T 36
文献标识码 : A
f r fr te r a i t n o e CAN. US US TO. AN t — y d t r n miso . h y tm a p cf AN b s a d US om o h e l a i ft z o h TO. B. B. C wowa a a t s si n T e s s a e h sse ic C u n B i c mmu iai n a v n a e fh g — e o a c o o n c t d a t g so i h p r r n e c mmu iai n n lx be c n e t i , i h r l b l y c n b p l d t n o fm n c t s a d f i l o n c i t h g ei i t , a e a p i o ma y o e vy a i e
汽车ECU标定系统CCP软件的实现
汽车ECU标定系统CCP软件的实现摘要:本文介绍了发动机测试系统的功能要求,合理的设计参数,仿真优化分析,PXI总线通信方法的使用和控制原理,基于PXI总线的发动机ECU测试系统的硬件和软件,性能,通用方法并讨论了汽车发动机ECU硬件和软件测试系统的性能要求。
关键词:汽车;ECU标定系统;CCP软件1前言控制算法包括ECU的操作和控制参数(包括发动机和每个子系统ECU)。
通过校准系统,可以将来自ECU校准变量的数据轻松读取到校准平台,并且可以编辑数据的修改。
编辑并写入ECU的数据,以修改ECU的校准参数。
完整的功能和灵活的校准软件对整个电子控制系统的发展具有重要影响。
通用校准系统采用基于串口的点对点通信方式,具有很大的局限性和不同的通信协议。
在这个ECU系统中,采用了CAN总线通信模式和CCP协议。
2汽车电子ECU测试系统设计方案2.1测试系统的功能要求近年来,与汽车制造和电子技术相结合的ECU测试系统已被广泛应用于汽车电子行业。
ECU测试系统采用最先进的电子计算技术,它具有身份识别、防盗、保护等功能。
确保系统设计一体化,体积小巧,品质优良,为汽车用户提供最佳的驾乘体验。
汽车点火系统的ECU测试技术,起动发动机,离合器控制起着重要的控制作用。
它不仅用于发动机,还用于汽车防抱死制动系统,车辆电子系统和其他车辆操作单元。
这有利于及时检查或修理汽车零部件。
不仅使用车的时间最长,而且对车主的人身安全,驾驶舒适度也有一定的帮助。
电子ECU技术不仅要求整个电子系统的高质量,还要求硬件,软件以及它们之间的关系和合作。
多次校正ECU技术是一项不可或缺的工作,每个阶段的工作细节也是必不可少的。
每个部件的生产过程和成品的功能测试也应该经过多次的仔细测试。
基于ECU在测试系统中的技术步骤,应采用专业编程,测试其可行性和有效性,并在实践中做好测试系统的监控和保证。
输出是自动和智能测试输入的基本功能,这也是汽车电子技术的发展趋势和未来。
ccp协议使用

ccp协议使用一、数据读取与测量CCP协议(CAN Calibration Protocol)主要用于汽车行业的标定和诊断。
它提供了一种标准化的方式来读取和测量ECU(Engine Control Unit)中的数据。
通过使用CCP协议,工程师可以获取发动机、变速器和其他汽车系统的实时数据,从而进行精确的测量和标定。
这些数据可以帮助工程师优化车辆性能,提高燃油经济性,并解决任何潜在的故障。
二、ECU系统处理在汽车中,ECU是控制各种系统(如发动机、变速器、刹车系统等)的关键组件。
CCP协议允许工程师直接与ECU进行通信,以读取和修改其内部的数据和配置。
这使得工程师能够更加精确地控制和调整ECU的行为,以满足特定的性能要求或解决特定的故障。
三、通信方式CCP协议基于CAN总线通信,这是一种广泛用于汽车行业的通信协议。
通过使用CAN总线,CCP协议可以在汽车内部的各种ECU之间进行高速、实时的数据传输。
这使得工程师可以从任何支持CCP协议的设备上远程访问和控制ECU。
四、系统结构CCP协议的系统结构相对简单。
它主要包括以下几个部分:1.硬件接口:用于连接CAN总线和ECU的硬件设备。
2.软件工具:用于读取、写入和测量ECU数据的软件应用程序。
3.数据传输协议:定义了如何通过CAN总线传输数据的规则和格式。
4.诊断和标定协议:定义了如何通过CCP协议对ECU进行诊断和标定的规则和格式。
五、应用领域由于CCP协议在汽车行业中广泛使用,因此其应用领域非常广泛。
以下是一些常见的应用领域:1.发动机标定:工程师可以使用CCP协议来读取和测量发动机的实时数据,然后使用这些数据来优化发动机的性能。
2.故障诊断:通过使用CCP协议,工程师可以诊断和解决汽车中的各种故障,从而提高车辆的可靠性和耐久性。
3.研发和测试:在汽车研发和测试阶段,工程师可以使用CCP协议来验证新设计的性能和功能。
车联网中基于CAN总线的数据采集研究
车联网中基于CAN总线的数据采集研究近年来,随着手机、电脑、智能家居等智能化设备的广泛普及,人们的生活越来越依赖于这些智能化技术。
而在交通领域,车联网技术的应用也越来越广泛,它不仅可以提高车辆的安全性能,还可以优化车辆的性能,提升驾驶体验。
而在车联网技术中,数据采集是其中的重要环节之一。
本文将重点研究车联网中基于CAN总线的数据采集方法。
一、CAN总线简介CAN(Controller Area Network)总线是一种工业领域中常用的串行通讯总线,其主要用于实时通讯和控制系统间的数据传输,具有高可靠性、安全性和实时性的特点。
CAN总线在车联网技术中的应用非常广泛,被广泛应用于车载控制系统、故障诊断系统、车辆网络通讯等方面。
CAN总线的数据传输方式是基于广播方式,也就是说每一个节点都会发送一个消息,而这个消息会被所有其他节点接收。
在CAN总线中,数据被称为消息,每一个消息都有一个标识符,标识符用于区分不同的消息。
同时,CAN总线具有优先级的概念,更高优先级的消息会被优先处理。
二、基于CAN总线的数据采集方法在车联网技术中,数据采集是非常重要的环节之一,它涉及到车辆性能的监测、故障诊断、车辆安全等方面。
而在基于CAN总线的数据采集中,需要实现两个步骤:消息的接收和消息的解析。
1. 消息的接收在CAN总线中,每一个节点都可以发送消息,而每一个节点也可以接收消息。
在基于CAN总线的数据采集中,一个节点通常会作为接收器。
接收器会监听CAN 总线上的消息,当有消息到来时,接收器会接收并保存这个消息。
在消息接收的过程中,需要进行一些消息的过滤,以便只接收需要的消息。
这通常通过设置过滤器来实现。
过滤器可以根据不同的标识符对消息进行过滤,只接收需要的消息,而忽略其他无关的消息。
2. 消息的解析在CAN总线中,消息的解析需要识别消息的标识符和数据。
而在车联网技术中,通常需要解析的数据包括车辆的速度、转速、油耗、温度等信息。
汽车综合性能检测过程中CAN通信网络的使用方法

汽车综合性能检测过程中CAN通信网络的使用方法CAN通信网络是现代汽车中常用的一种通信协议,它能够实现车辆各个电子控制单元(ECU)之间的信息交换和通信。
在汽车综合性能检测过程中,CAN通信网络的使用方法非常重要。
本文将详细介绍CAN通信网络的使用方法。
一、CAN通信网络的基本原理和特点1. 基本原理:CAN通信网络采用的是分布式控制的通信方式,即各个ECU之间可以相互通信,而无需通过中央处理器进行调度。
CAN通信网络采用的是总线结构,即所有ECU通过同一根总线进行通信。
2. 特点:CAN通信网络具有高可靠性、高带宽、低成本等特点。
它能够实现高速、实时的数据传输,并能够在发生错误时自动纠正,保证数据的准确性和可靠性。
1. 搭建CAN网络:在进行汽车综合性能检测之前,需要根据实际情况搭建CAN网络。
一般来说,CAN网络由一个主控ECU和多个从控ECU组成,主控ECU负责控制整个网络的通信流程,而从控ECU则负责接收和发送数据。
2. 确定通信参数:在搭建CAN网络之后,需要确定CAN通信的一些参数,如波特率、帧格式等。
波特率是指CAN通信网络中数据传输的速率,通常用bps来表示,一般情况下,波特率越高,数据传输速度越快,但对硬件的要求也越高。
帧格式是指CAN通信中数据的传输格式,主要有标准帧和扩展帧两种,其中扩展帧可以传输更多的数据。
3. 编写CAN接口程序:在进行汽车综合性能检测时,需要根据实际需求编写CAN接口程序,用于控制CAN通信的开始、停止、发送和接收等操作。
一般来说,CAN接口程序可以使用C语言进行编写,并通过调用CAN相关的API函数来完成相应的操作。
4. 进行数据传输:在CAN通信网络正常工作之后,可以进行数据的传输。
在汽车综合性能检测中,可以通过CAN通信网络实时地获取汽车各个部件的工作状态,如发动机转速、车速、油耗等,并将这些数据保存到相应的文件中,以供后续分析和处理。
5. 故障诊断和排除:在进行汽车综合性能检测过程中,可能会出现通信故障或其他问题。
基于CAN总线的XCP标定协议研究

基于CAN总线的XCP标定协议研究CAN总线是一种常用的数据通信协议,广泛应用于汽车电子系统中。
XCP(Measurement and Calibration Protocol)是一种基于CAN总线的标定协议,用于汽车电子系统的在线标定和诊断。
首先,XCP协议为汽车电子系统提供了一种快速、高效的标定和诊断方法。
在汽车电子系统的开发和生产过程中,需要对各种传感器、执行器以及控制算法进行标定和调试。
传统的标定方法需要通过人工操作,耗时且效率低下。
而使用XCP协议,可以直接通过CAN总线与ECU (Electronic Control Unit)通信,实现远程标定和调试,大大提高了工作效率。
其次,XCP协议具备高度的灵活性和可扩展性。
XCP协议定义了一系列的消息格式和命令,包括数据采集、标定参数读写、执行算法操作等。
通过这些命令,可以灵活地对ECU进行控制。
同时,XCP协议支持插件机制,可以根据需要添加新的特性和命令,使得协议可以适应不同的应用场景和需求。
另外,XCP协议具备较高的数据传输速率和稳定性。
CAN总线具有较高的传输速率和抗干扰能力,能够保证数据的可靠传输。
而XCP协议在CAN总线上基于UDP/IP协议栈实现数据的传输,可以实现更高的数据传输速率和更低的延迟,适用于实时性要求较高的标定和调试场景。
此外,XCP协议还具有良好的兼容性。
XCP协议定义了通信接口和命令格式,使得不同厂家的设备和工具可以进行互操作。
这样,开发人员可以选择适合自己的标定工具和设备,并且可以灵活地切换和组合使用,提高了开发效率和便利性。
总之,基于CAN总线的XCP标定协议在汽车电子系统的标定和诊断中具有重要的作用。
它通过提供快速、高效的远程标定和调试方法、灵活可扩展的命令和插件机制、高速稳定的数据传输以及良好的兼容性,帮助开发人员实现对汽车电子系统的高效开发和优化。
未来,随着汽车电子系统的不断发展和应用的拓展,XCP协议将发挥越来越重要的作用。
ecu标定流程

ECU标定流程
一、标定前准备
1.确定标定目标
(1)确认需要标定的参数
(2)设定标定的目标数值
2.准备工具和设备
(1)确保标定软件及硬件准备就绪(2)连接ECU至标定设备
二、读取原始数据
1.连接至车辆ECU
(1)确认连接正确
(2)读取ECU原始数据
2.导出数据文件
(1)将原始数据导出至标定工具(2)确认数据完整性
三、参数调整
1.根据标定目标调整参数
(1)调整燃油喷射量
(2)调整点火提前角度
2.进行多次反复调整
(1)进行参数微调
(2)反复测试并记录结果
四、验证与优化
1.验证调整效果
(1)进行实际行驶测试
(2)检查参数表现
2.优化参数
(1)根据测试结果再次调整参数(2)确保性能与效率达到最佳状态
五、写入新参数
1.确认最终参数
(1)确认标定结果符合要求
(2)确定最终调整参数
2.写入新参数至ECU
(1)将最终参数写入ECU内存(2)确认写入成功。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
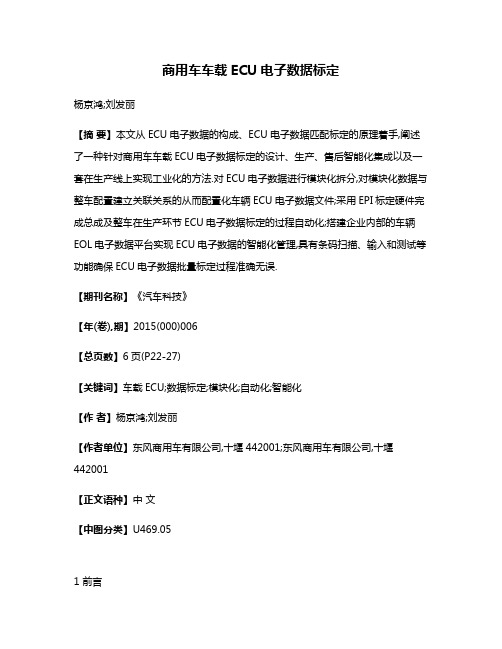
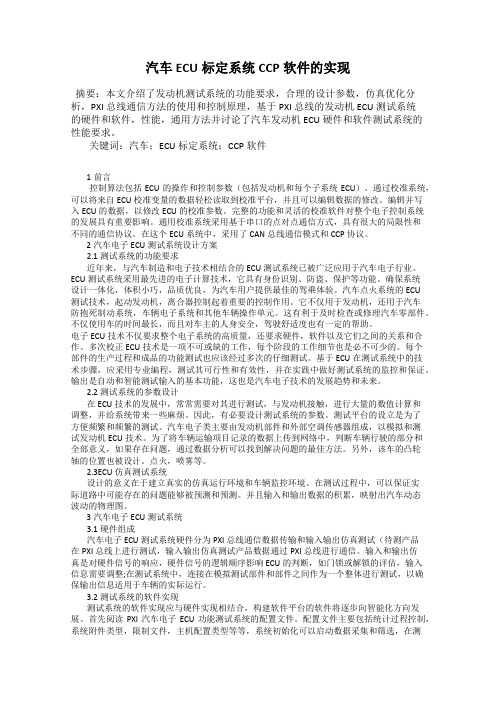
数据处理与m “”1””l
l,7—、
!~
I,
。:<。。I
cAN通信与设备 配置响应模块
c镒线t、I【r錾蠢嚣 摊熊▲潞参 l…Ⅲ’_■’
- I
L二:j苫。已,、 口’"”
●■
I
■
I
I
I
l
l
l l l
上位机UsB驱动模块
瑚瑚仁:●
下位机L'sB 通信响应模块
l
I
usB总线.!
l l
物理雀 …撼’lL一一一-气壤磊…一·
现有的CAN总线数据采集和标定设备,是将CAN信号收 发芯片封装成CAN通信卡,CAN通信卡再通过PCI、PCMCIA 等总线接口与计算机连接,在计算机端设计监控和标定界面, 实现与CAN总线的通信和ECU标定。这些设备都是采用通用 型设计,软件较复杂,集成度高,在用于具体的监控项目时需要 进行复杂的二次开发,因此灵活性不好,难以深入地进行CAN 总线性能测试与分析。针对这些产品的不足,利用USB高速的 通信性能和灵活的连接特性代替传统总线接口作为CAN设备 与计算机相连接的总线接口,这将不仅保证了通信的性能,又
2010往 第2期
仪表技术与传感器
Instrument Technique and Sensor
2010 No.2
车载CAN总线数据采集和ECU标定系统
吴艳,王丽芳,廖承林
(中国科学院电工研究所,北京100190)
摘要:介绍了一种基于USB接口的CAN总线数据采集和ECU标定系统,该系统采用了摩托罗拉16位单片机
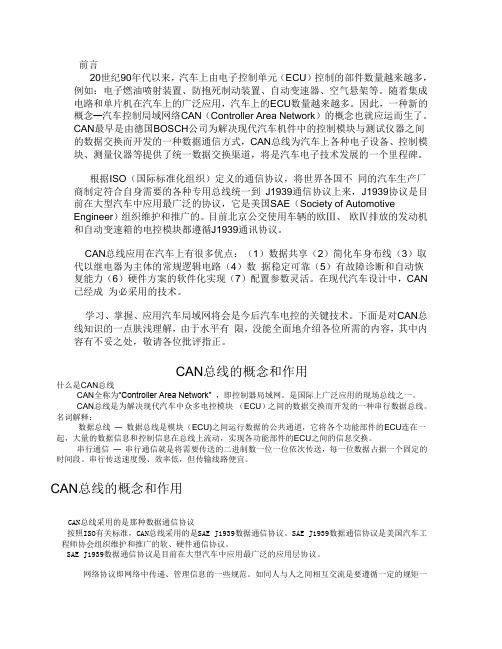
该系统的软件由上位机软件和下位机软件2部分构成。 上位机作为系统的控制器,用于控制下位机CAN总线数据采 集,实现用户端的数据处理和显示;进行快速的数据标定和配 置,并将控制命令通过USB接口发送到下位机。
如图3所示,从逻辑上来讲,上下位机可以看成USB主机 和USB设备,不同的功能部件对应不同的USB端点通信方式。 USB主机对设备的枚举,依赖于USB控制端点0;CAN信号数 据采集则依赖于USB中断端点1(用于缓存区查询)和批量端
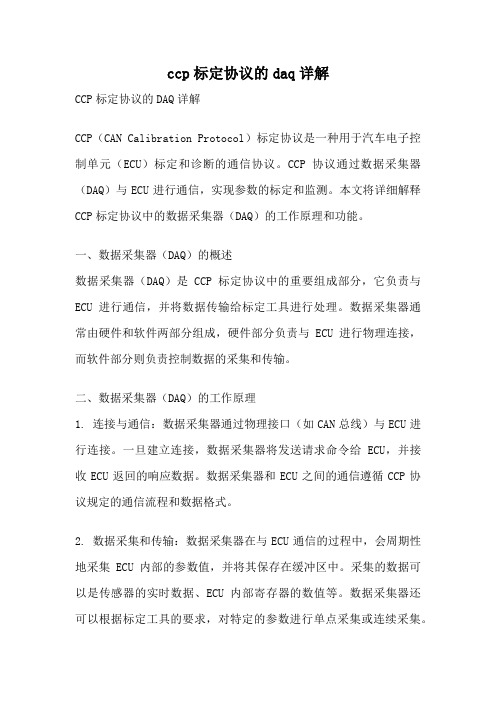
上位机控制系统
I USB接口l
◆+。一一一
USB接口I:lIjsB接口I!
下位机执行系统;
l!
Do.
3I
儿
电 池 管 理 系 统
CAN接口愀’AN接口Il
1
一一
’
。
1 一I
C
蟮 U 12I CAN网络 组
动
合
机 控
篓
制
系
笪
统
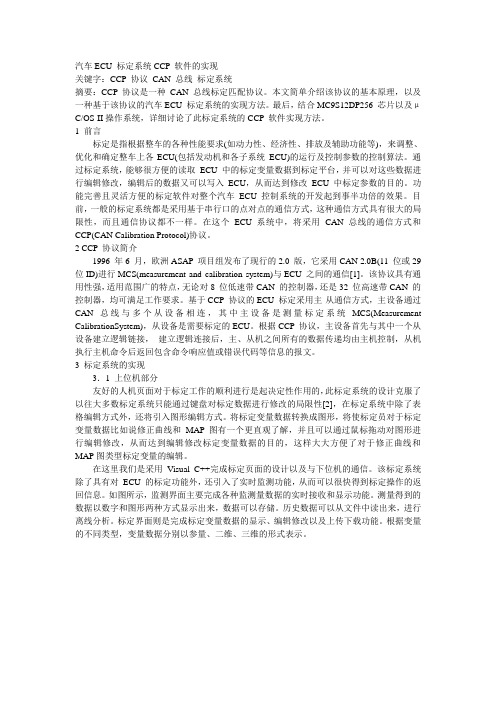
图2系统整体结构框图
2系统硬件电路设计 下位机是系统的执行器,系统硬件设计主要指下位机的硬
在进行协议转换时,需要解决CAN标识符转换问题,需将 MSCAN格式的32位标识符与29位CAN协议扩展标识符按照 下面的算法进行转换。
第2期
吴艳等:车载CAN总线数据采集和ECU标定系统
59
Idr32=(unsigned long)(((Idr29&0xFFF_x0000)>>3)I ((Idr29&0x0007FFFF)>>1)10):
件设计。该系统采用Freeseale的MC9S12DP256单片机作为核 心处理器,这款单片机自带CAN处理模块,具有较高的总线速 度和丰富的外部接121[31;电源电路,晶振电路,复位电路,BDM 调试电路为单片机的主要外围电路,系统的功能接口电路为 CAN总线接口和USB接口,采用82C250 CAN收发芯片设计 CAN信号收发电路;PDIUSBDl2作为USB接121芯片,该芯片支 持最高传输速度12 Mbps的USBl.1标准,内部集成了许多特 性,包括SofiConnetTM、GoodLinkTM、可编程时钟输出、低频晶振 和终止寄存器集合,芯片本身时钟频率最高可达48 MHz,完全 满足CAN通信时的速度要求H J。 3系统软件体系结构
MC9S12DP256,USB接口芯片PDIUSBDl2和CAN接口芯片82C250,并借助LabVIEW软件开发平台实现了CAN—TO—
USB,USB—To—CAN双向数据传输。该系统同时具有CAN总线和USB通信的优点,具有良好的通信性能,灵活的连接
特性以及高的可靠性,可适用于很多场合的数据采集和标定。文中以其在混合动力汽车网络中的应用为例,阐述了系统
收稿B期:2009—06—02收修改稿日期:2009—10—10
万方数据
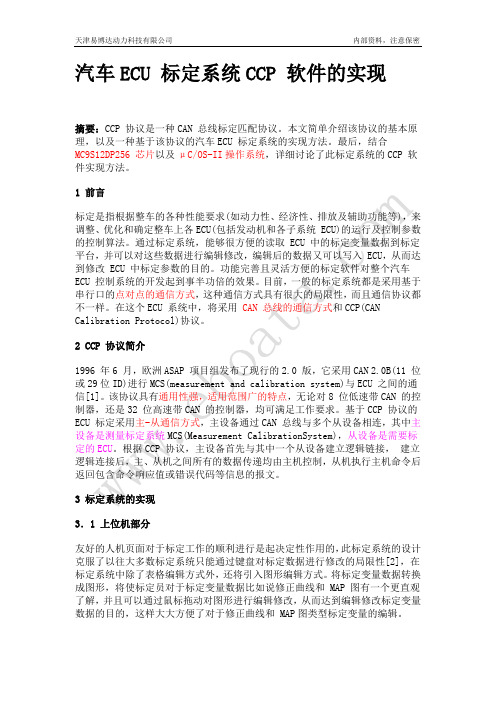
图1系统功有结构图
58
Instrument Technique and Sensor
Feb.20lO
应的软件实现,下位机功能模块的实现需要设计相应的硬件电 路,并设计其中的控制程序。底层的2个模块实际上是USB通 信接口,它用于完成上位机(USB主机)到下位机(USB设备) 端的通信,上层的2个模块是系统的功能模块,用于系统设定 功能的实现。
WU Yan,WANG Li—fang,LIAO Cheng—lin (Institute of Electrical Engineering,Chinese Academy of Sciences,&ijing 100190,China)
Abstract:A CAN bus data acquisition and calibration system based OH USB interface W88 introduced.The system adopted 16- bit microprocessor MC9S12DP256,USB interface chip PDIUSBDI 2 and CAN interface chip 82C250 and LabVIEW software plat- form for the realization of the CAN.TO.USB.USB.TO.CAN two-way data transmission.The system has specific CAN bus and USB communication advantages of high—performance communications and flexible connectivity,hish reliability,can be applied to many occasions of the data acquisition and calibration.Using the system in network of hybrid electric vebicle ag an example,the paper de- scribed the overall design of the system,and presented ideological hierarchy,and also the designing process of the software and
同理,在将上位机通过USB传输得到的消息传到CAN总
线上时,须将上述数据格式转换成CAN消息的数据格式,即将 32位的标识符转换成29位标准标识符。图5为MSCAN接收
数据块格式,转换算法如下:
Id29=(unsigned long)((((Id32&OxlFFc0000)“3)I
Ox00180000)I(((Idr32&O)舢3FFFF),“1)I
软件开发变得高效而灵活。
上位机的软件结构图如图6所示,从左到右依次是上位机
软件执行过程中的3个部分:初始化,定时中断循环和程序关
闭部分。在初始化阶段,程序将功能实现层程序中的关键变量
和参数设置为默认值,并打开USB设备。定时中断部分是上位
机软件功能实现的主要部分,该模块产生定时中断,每次中断
中定时执行3个任务——接收和处理CAN上行数据,查询和执
下位机软件设计即单片机嵌入式程序设计,用于控制单片 机实现CAN总线通信和USB通信,响应上位机的配置命令等; 在程序设计时,遵循了分层设计思想;采用了模块化设计方法, 设计了功能实现层和USB通信响应层2个模块。其中单片机 主程序的流程图如图4所示,单片机上电后,先初始化单片机 的相关模块和PDIUSBDl2芯片,初始化正常完成后,开全局中 断;程序主循环中单片机前台等待CAN接收中断和PDIUS- BDl2中断;CAN数据采集,PDIUSBDl2通信均在中断处理程序 中完成。中断处理机制可以使CAN通信和USB通信不受单片 机主循环执行状态的影响,随时在中断处理函数中得到响应, 从根本上保证了通信响应的实时性。
的总体设计思想及其层次结构,并给出系统软、硬件的具体设计方案。
关键词:CAN;USB;LabVIEW;NI—VISA;数据采集和标定。
中图分类号:TP336
文献标识码:A
文章编号:1002—1841(2010)02—0057—03
In-Vehicle CAN Data Acquisition and Calibration System
行标定配置操作以及总线错误查询操作。程序退出部分则确
பைடு நூலகம்
保正确地结束功能实现层的定时循环,关闭USB设备,并释放
相关的资源。图中的虚线将上位机软件划分为USB设备驱动
程序以及功能实现层程序两层。需要注意的是,这种划分只是
hardware.
Key words:CAN;USB;LabVIEW;NI—VISA;data acquisition and calibration
0引言 随着CAN总线在汽车控制系统中的大规模应用,整车几
乎全部的控制和状态信息都依赖CAN总线传输。通过采集和 分析CAN总线上的信号,便町得到各个子系统的运行状态和 各个部件的实时参数,这使得数据采集系统的设计变的简单灵 活¨1。ECU(Electronic Control Unit,电子控制单元)标定则是汽 车设计过程中一项重要的工作,研究人员可根据控制对象和控 制要求修改ECU内部的控制参数以达到较好的控制效果;基于 CAN总线的ECU标定工具是把标定命令通过CAN总线传输给 ECU,ECU根据命令调用相应的标定处理程序来实现标定过 程,这种方式提高了标定效率和标定操作的可靠性口J。