单片机控制交通灯
用单片机控制交通灯源程序代码及流程图

用单片机控制交通灯传统的交通灯控制电路一般由数字电路构成,电路复杂、体积大、成本高。
采用单片机控制交通灯不但可以解决上述问题,而且还具有时间显示功能,非常方便。
下面介绍一种用单片机控制交通灯的方法。
一、硬件硬件电路如附图。
AT89C2051的P1.7~P1.5和P1.3~P1.1直接驱动红、黄、绿灯,利用单片机的串口和二片74LS164串/并转换移位寄存器实现时间显示,七段数码管为共阴管,硬件电路极为简单。
二、软件交通灯有红、黄、绿三种。
红灯亮,停止通行;绿灯亮,允许通行;黄灯亮,作过渡。
红灯亮60秒,绿灯亮55秒,黄灯亮5秒。
每组灯的亮暗状态以2分钟为周期循环,故程序采用主、子程序方式,循环结构。
另外,为了简化电路,红、黄、绿灯采用低电平点亮。
源程序清单如下:ORG0000HSTART:MOVDRTR,#TABMOVSCON,#00HMOVP1,#6CH;点亮红、绿灯MOVR0,#0;R0清零LEFT:INCR0CJNER0,#55,LP0;R0<55,转LP0MOVP1,#6AH;R0=55,点亮红、黄灯LJMPLP1LP0:CJNER0,#60,LP1;R0<60,转LP1MOVP1,#0C6H;R0=60,点亮绿、红灯LJMPRIGHTLP1:LCALLDBDBLCALLDISPLJMPLEFT;20H为1,转LEFTRIGHT:DECR0CJNER0,#5,LP2;R0>0,转LP2MOVP1,#0A6H;R0=5,点亮黄、红灯LJMPLP3LP2:CJNER0,#0,LP3MOVP1,#6CH;R0=0,点亮红、绿灯LJMPLEFTLP3:LCALLDBDBLCALLDISPLJMPRIGHTDBDB:MOVA,R0MOVB,#10DIVABMOVR1,AMOVR2,BRETDISP:MOVA,R2MOVCA,@A+DPTRMOVSBUF,AJNBTI,$;查TI位CLRTIMOVA,R1MOVCA,@A+DPTRMOVSBUF,AJNBT1,$CLRTILCALLDEALYRETDELAY:MOVR3,#09HK1:MOVR4,#100K2:MOVR5,#250K3:DJNZR5,K3DJNZR4,K2KJNZR3,K1RETTAB:DB3FH,06H,5BHDB4FH,66HDB6DH,7DH,07HDB7FH,6FH三.实验电路及连线四.实验说明1.因为本实验是交通灯控制实验,所以要先了解实际交通灯的变化规律。
基于单片机的交通信号灯的控制系统设计

基于单片机的交通信号灯的控制系统设计交通信号灯是城市交通管理中非常重要的一部分,它通过灯光信号来指示道路上车辆和行人的行动。
基于单片机的交通信号灯控制系统可以实现对交通信号的自动控制,并能根据实际交通情况和时间变化进行灵活调整,提高道路交通的效率和安全性。
1.系统设计需求分析:
-实现红、黄、绿三种信号灯的循环显示,时间可设定;
-根据实际交通情况和时间变化,动态调整红、黄、绿三种信号灯的显示时间;
-配备感应器,检测行人和车辆的存在,根据情况自动调整信号灯时间。
2.系统硬件设计:
-选择合适的单片机,如AT89C52;
-使用LED灯作为信号灯显示器件;
-选择适当的传感器,如红外传感器用于检测行人,光敏电阻用于检测车辆;
-选择适当的电路板进行连接。
3.系统软件设计:
-编写单片机的控制程序,实现红、黄、绿三种信号灯的循环显示;
-设定初始的信号灯显示时间;
-利用定时器和中断控制程序,实现对信号灯显示时间的控制,可以根据设定的时间进行调整;
-设定感应器的检测程序,当检测到行人或车辆时,调整信号灯显示时间。
4.系统工作流程:
(1)初始化系统,设定初始的信号灯显示时间;
(2)通过定时器和中断控制程序实现循环显示红绿黄信号灯;
(3)检测行人和车辆的存在,根据情况调整信号灯显示时间;
(4)循环执行步骤2和步骤3,实现自动控制交通信号灯。
5.系统优化方案:
-根据实际交通数据和研究结果,优化信号灯显示时间;
-利用流量监测技术,实时监测道路交通情况,进一步优化信号灯的控制策略;
-可以加入数据通信模块,将采集到的交通数据上传到中央交通管理系统,实现更智能化的交通信号灯控制。
8单片机交通灯远程控制系统设计和制作

8单片机交通灯远程控制系统设计和制作单片机交通灯远程控制系统是一种利用单片机技术和无线通信技术实现对交通灯的远程控制的系统。
本文将详细介绍该系统的设计和制作。
设计思路:1.系统整体架构:系统由交通灯控制器、无线通信模块、远程控制终端和交通灯组成。
其中,交通灯控制器通过单片机控制交通灯的开关,无线通信模块负责和远程控制终端建立连接并传输控制指令。
2.硬件设计:a.交通灯控制器:使用单片机作为控制核心,通过IO口输出控制信号控制交通灯的亮灭。
可以使用基于AVR、STM32等单片机的开发板。
b.无线通信模块:选择一种合适的无线通信模块,如WiFi模块、蓝牙模块或者射频模块,用于和远程控制终端进行通信。
c.远程控制终端:可以是一台电脑、智能手机或者单片机终端设备。
通过用户界面发送控制指令给交通灯控制器。
3.软件设计:a.单片机控制程序:编写单片机上的控制程序,根据接收到的命令控制交通灯的亮灭状态。
可以使用C语言或者汇编语言编写。
b.无线通信程序:编写无线通信模块上的程序,用于建立和维持与远程控制终端的通信连接,并将接收到的控制指令传送给单片机控制程序。
c.远程控制终端程序:编写远程控制终端上的程序,用于发送控制指令给交通灯控制器。
可以选择适合的编程语言和界面设计工具。
4.制作过程:a.制作交通灯控制器:根据设计思路,选择合适的单片机和开发板,连接交通灯,并编写控制程序,完成交通灯控制器的制作。
b.制作无线通信模块:选择合适的无线通信模块,根据其提供的开发文档进行接线和程序编写,完成无线通信模块的制作。
c.制作远程控制终端:根据设计要求,制作远程控制终端,安装相应程序,并实现与交通灯控制器的通信。
d.进行整体测试:将交通灯控制器、无线通信模块和远程控制终端进行连接,测试系统的功能是否正常,并对系统进行调试和优化。
5.系统功能:a.远程控制交通灯的亮灭状态:用户可以通过远程控制终端向交通灯控制器发送控制指令,实现对交通灯的开关操作。
单片机控制交通灯

单片机控制交通灯要实现单片机控制交通灯,首先需要了解交通灯的工作原理和控制方式。
一般的交通灯控制有三种状态:红灯、黄灯和绿灯。
红灯表示停车,黄灯表示准备停车或准备起步,绿灯表示行驶。
下面是一个基本的单片机控制交通灯的程序示例:```c#include<reg52.h>//定义LED端口sbit redLight = P1^0;sbit yellowLight = P1^1; sbit greenLight = P1^2;//定义延时时间#define delayTime 1000void delay(unsigned int ms){ unsigned int i,j;for(i=ms;i>0;i--)for(j=110;j>0;j--);}void init(){//清零redLight = 0;yellowLight = 0;greenLight = 0;}void mn(){init(); //初始化while(1){//红灯redLight = 1;yellowLight = 0; greenLight = 0; delay(delayTime);//黄灯redLight = 0;yellowLight = 1; greenLight = 0; delay(delayTime);//绿灯redLight = 0;yellowLight = 0; greenLight = 1; delay(delayTime); }}```上面的代码使用了8051单片机的开发环境,通过定义三个LED端口,分别控制红、黄、绿三种交通灯的状态。
通过设置不同的IO口状态来控制交通灯的亮灭。
在`init()`函数中,先将所有LED端口设置为低电平,即熄灭状态。
在`mn()`函数中,使用循环控制交通灯额亮灭状态。
先点亮红灯,延时一段时间后熄灭。
然后点亮黄灯,延时一段时间后熄灭。
最后点亮绿灯,延时一段时间后停止。
单片机控制交通灯
单片机控制交通灯标题:单片机控制交通灯交通信号灯作为城市交通管理的重要组成部分,通过控制红绿灯的变化来引导车辆和行人的通行,起到维护交通秩序、提高交通效率的作用。
在现代城市中,越来越多的交通信号灯采用了单片机技术来进行控制,本文将介绍单片机控制交通灯的原理和实现方法。
一、交通灯控制原理交通信号灯一般采用红、黄、绿三种颜色,分别表示停止、警告和通行。
在单片机控制下,交通信号灯的控制可以通过三个IO口实现。
其中,一个IO口控制红灯,一个IO口控制黄灯,一个IO口控制绿灯。
通过控制这三个IO口的高低电平状态,可以实现交通灯的变化。
二、单片机控制交通灯的实现方法为了实现交通灯的自动切换,可以使用定时器中断和状态机两种方法。
1. 定时器中断方法定时器中断方法是通过设置一个定时器,在规定的时间间隔内触发中断,从而实现交通灯的切换。
具体实现步骤如下:(1)初始化定时器:设置定时器的工作模式和计数值,使其在固定时间内触发一次中断。
(2)设置中断优先级:为了确保定时器中断能够正常执行,需要设置中断优先级。
(3)编写中断服务函数:中断服务函数中通过改变IO口的电平状态,来控制交通灯的切换。
2. 状态机方法状态机方法是通过一个状态机来记录当前交通灯的状态,并根据一定的规则不断切换状态,实现交通灯的自动切换。
具体实现步骤如下:(1)定义状态枚举:定义一个枚举类型,用于表示交通灯的不同状态,例如红灯、黄灯、绿灯。
(2)初始化状态机:将状态机的初始状态设置为红灯。
(3)编写状态切换规则:根据交通灯的切换规则,编写代码来实现状态的切换。
(4)控制交通灯:根据状态机的当前状态,通过改变IO口的电平状态,来控制交通灯的切换。
三、单片机控制交通灯的优势相比传统的交通灯控制方法,单片机控制交通灯具有以下几个优势:1. 精确控制:单片机具有较高的计算精度和处理能力,可以精确控制交通灯的时间和变化方式。
2. 灵活性:通过编程修改程序和参数,可以很容易地调整交通灯的控制策略,适应不同的交通状况。
单片机控制交通灯(内含程序和实物图)
摘要随着经济发展,汽车数量急剧增加,城市道路日渐拥挤,交通拥塞已成为一个国际性的问题。
因此,设计可靠、安全、便捷的多功能交通灯控制系统有极大的现实必要性。
根据交通灯在实际控制中的特点,结合单片机的控制功能,提出了一种用单片机自动控制交通灯的简易方法。
设计中包括硬件电路的设计和程序设计两大步骤,对单片机学习中的几个重要内容都有涉足。
单片机的应用正在不断深入,单片机可以用来仿真各个系统。
在自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。
十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。
那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。
交通信号灯控制方式很多。
本系统采用单片机STC89C52为中心器件来设计交通灯控制器,实现了通过P1口设置红、绿灯燃亮时间的功能;红绿灯循环点亮,倒计时剩5秒时黄灯闪烁警示(交通灯信号通过P1口输出,显示时间通过P0口输出至双位数码管)。
本系统设计周期短、可靠性高、实用性强、操作简单、维护方便、扩展功能强。
关键词:单片机交通灯数码管Microcontroller to control traffic lights Abstract: With economic development, a sharp increase in the number of cars, increasingly crowded city roads, traffic congestion has become an international problem. Therefore, the design of reliable, safe, convenient and versatile traffic light control system of great practical necessity.According to the characteristics of the traffic lights in the actual control, combined with the microcontroller control functions, and easy with Auto Control traffic lights. The design includes two steps of the hardware circuit design and programming have to get involved in several important single-chip learning.The application of microcontroller is the deepening of the Microcontroller can be used to simulate systems. In the automatic control of microcomputer application system, the Microcontroller is often used as a core component to use only Microcontroller knowledge is not enough, but also according to the specific hardware architecture hardware and software, to be improved.Crossroads shuttle vehicles, pedestrians bustling Dealers lane, walkways, and orderly. Rely on to achieve this orderly order? Rely on automatic command system of traffic lights. Traffic signal control. The system uses the Microcontroller STC89C52-centric devices to design the traffic signal controller to achieve a set of red, green light to kindle through the P1 port function of time; traffic light cycle lights, countdown 5 seconds left flashing yellow warning (traffic light signals through the P1 the output port, and displays the time through the P0 port output to double-digit LED). The system design cycle, high reliability, practical, simple operation, easy maintenance, strong extensions.Key words:microcontroller traffic light digital tub目录第1章前言 (1)1.1交通灯发展概述 (1)1.2 课题背景及意义 (2)1.3课题任务及主要实现内容 (3)1.4 原理分析 (4)1.4.1交通灯显示时序的理论分析 (4)1.4.2 交通灯显示的理论分析 (5)第2章设计方案分析 (6)2.1 单片机与外围接口部件 (6)2.2 倒计时显示界面 (7)2.3 交通灯 (7)第3章硬件系统设计 (8)3.1 单片机的选择 (8)3.2 硬件电路实现 (11)3.2.1 最小系统设计 (11)3.2.2 显示设计 (13)3.2.3 发光二极管模拟红绿灯 (15)3.2.4 按键模块 (16)第4章软件电路设计 (17)4.1 软件编译环境测试 (17)4.1.1 C语言介绍 (17)4.1.2 Keil uVision4介绍 (17)4.2软件总体设计 (17)第5章电路检测 (21)结论 (24)致谢 (25)参考文献 (26)附录: (27)源程序: (29)第1章前言单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。
单片机控制交通灯的硬件设计

单片机控制交通灯的硬件设计随着城市化进程的加速,交通问题越来越成为人们的焦点。
交通灯控制系统在城市交通管理中发挥着至关重要的作用。
传统的交通灯控制系统通常采用模拟电路或继电器实现,但这些方法具有可靠性低、维护成本高等缺点。
近年来,单片机技术的快速发展为交通灯控制系统的设计提供了新的解决方案。
本文将介绍如何使用单片机控制交通灯的硬件设计。
信号灯的种类:至少包括红、绿、黄三种信号灯,每种信号灯具有不同的控制周期。
信号灯的数量:根据实际交通需求,确定所需信号灯的数量。
控制方式:支持手动和自动两种控制方式,手动控制用于特殊情况下的人工干预,自动控制用于日常交通流量管理。
故障检测与报警:具备故障检测功能,当信号灯出现故障时,能够及时发出报警提示。
在硬件设计中,首先需要选择合适的单片机型号。
根据交通灯控制系统的需求,单片机应具备以下特点:a.具有足够的I/O端口,以连接所需的信号灯和其它外设;b.具有可编程定时器/计数器,以实现信号灯的定时控制;c.具有串行通信接口,以实现与上位机或其他设备的通信;d.具有看门狗功能,以确保系统运行的稳定性。
单片机控制交通灯的硬件电路主要由以下几部分组成:a.单片机主控模块:负责整个系统的定时控制、信号灯控制、故障检测等核心功能。
b.信号灯模块:包括红、绿、黄三种信号灯,每种信号灯由相应的LED灯珠和驱动电路组成。
c.按键模块:实现手动控制功能,包括开关按钮和分时段调节按钮。
d.故障检测模块:负责对信号灯故障进行检测,当故障发生时,通过报警器发出报警提示。
e.电源模块:为整个系统提供稳定可靠的电源。
在单片机控制交通灯的硬件设计中,需要实现以下接口方式:a.单片机与信号灯之间的接口:采用光电耦合器实现单片机与信号灯之间的电气隔离,以确保系统的稳定性。
b.单片机与按键之间的接口:按键采用机械触点式,与单片机之间通过触点连接。
c.单片机与故障检测模块之间的接口:采用模拟电压或电流的方式,将故障信息传递给单片机。
基于单片机的智能交通灯控制系统设计与实现

基于单片机的智能交通灯控制系统设计与实现智能交通灯控制系统是一个基于单片机技术的交通管理系统,通过智能化的控制算法和传感器设备来实现交通信号的自动控制,提高交通效率和安全性。
下面将详细介绍智能交通灯控制系统的设计与实现。
首先,智能交通灯控制系统需要使用一种合适的单片机进行控制。
在选择单片机时,需要考虑处理性能、输入输出接口的数量和类型,以及对实时性的要求。
一般来说,常用的单片机有STM32、Arduino等。
在本设计中,我们选择了STM32作为控制器。
其次,智能交通灯控制系统需要使用多个传感器设备来感知各个方向上的交通情况。
常用的传感器包括车辆识别感应器、红外线传感器和摄像头等。
这些传感器可以通过GPIO和串口等接口与单片机进行连接,并通过单片机的开发板上电路来提供供电和信号转换。
接下来,智能交通灯控制系统需要设计一个合适的算法来根据传感器的输入数据进行交通灯的控制。
在设计算法时,需要考虑各个方向上的交通情况、优先级和交通流量等因素。
一个常见的算法是基于信号配时的方式,通过设置不同的绿灯时间来实现交通流量的优化。
此外,智能交通灯控制系统还需要具备良好的用户界面,方便交通管理员进行参数设置和监控。
可以使用LCD屏幕显示当前的交通灯状态和交通流量等信息,通过按键和旋钮等输入设备进行操作。
在实现智能交通灯控制系统的过程中,需要进行软件和硬件的开发。
软件开发涵盖了单片机程序的编写,包括传感器数据的采集和处理、交通灯状态的控制和显示等。
硬件开发涵盖了电路的设计和制作,包括传感器的接口电路、电源管理电路和输入输出控制电路等。
最后,在实现智能交通灯控制系统后,需要进行测试和调试。
通过对系统进行功能测试和性能测试,检验系统的稳定性和可靠性。
在实际应用中,还需要考虑交通流量的变化和高峰时段的处理,以及与其他系统的接口和数据交互。
综上所述,基于单片机的智能交通灯控制系统设计与实现需要考虑单片机的选择、传感器设备的使用、控制算法的设计、用户界面的设计、软件和硬件开发等环节。
基于单片机交通灯智能控制系统

03 交通灯控制系统 设计
系统需求分析
功能需求
交通灯控制系统应具备对交通 路口的车辆和行人进行指挥的 功能,同时具有实时性、可靠
性和智能性。
性能指标
系统的性能指标应包括反应时间、 稳定性、耐用性和维护性等。
用户需求
用户应能够方便地设置交通灯的亮 灭时间,同时系统应具备自动调整 功能以适应不同的交通状况。
交通流量的变化等。
因此,研究一种基于单片机的智 能交通信号灯控制系统,具有非 常重要的理论意义和实践价值。
研究内容与方法
研究内容
本课题主要研究一种基于单片机的智能交通信号灯控制系统,通过实时检测交通流量和车辆速度等参数,动态调 整信号灯的灯光时序和配时方案,提高交通效率,减少交通拥堵。
研究方法
采用理论分析和实验验证相结合的方法,首先进行需求分析和系统设计,然后进行硬件选型和软件开发,最后进 行实验测试和效果评估。具体的研究方法包括硬件电路设计、单片机程序设计、交通流量和车辆速度检测算法研 究、系统调试与测试等。
系统架构
采用模块化设计方法,将 系统划分为各个功能模块 ,如主控模块、检测模块 、显示模块等。
算法设计
根据需求,设计合理的控 制算法和调度策略,如模 糊控制、神经网络等。
04 系统功能与实现
交通灯控制功能
定时控制
根据预设的时序,控制交 通灯的灯光显示,实现定 时切换。
感应控制
通过红外感应器检测车辆 和行人的流量,根据需求 自动调整交通灯的灯光时 序。
测试结果与分析
测试数据
通过专业仪器和设备收集交通灯智能控制系统的 各项指标数据。
结果分析
对收集到的数据进行详细分析,包括平均等待时 间、通行效率等,以评估系统的实际表现。
基于单片机控制交通灯设计
基于单片机控制的交通灯设计摘要:交通信号灯控制方式很多。
本设计主要分为五大模块输入控制电路、时钟控制电路、片内外程序切换控制、显示电路。
关键字:at89c51 led显示交通灯一、交通灯简介假设一个十字路口为东西南北走向。
初始状态0为东西南北灯都熄灭。
然后转状态1东西绿灯通车,南北红灯。
过一段时间转状态2,东西绿灯闪几次转亮黄灯,延时几秒,南北仍然红灯。
再转状态3,南北绿灯通车,东西红灯。
过一段时间转状态4,南北绿灯闪几次转亮黄灯,延时几秒,南北仍然红灯。
最后循环至状态1。
利用单片机的定时器定时,令十字路口的红绿灯交替点亮和熄灭,并且用led数码管显示时间。
用十二个发光二极管燃灭,模拟交通灯管理。
二、工程设计(一)、控制方案的确定交通灯控制系统的原理主要由控制器、定时器、译码器和秒脉冲信号发生器等部分组成。
秒脉冲发生器是该系统中定时器和控制器的标准时钟信号源,译码器输出两组信号灯的控制信号,经驱动电路后驱动信号灯工作,控制器是系统的主要部分,由它控制定时器和译码器的工作。
(二)、硬件部分(1)、交通灯控制系统的硬件设计:交通灯控制系统的硬件设计包括:存储器的扩展(62256),i/o口的扩展(8255),地址的锁存(74ls373或74ls273),还有反向器(7407)。
数据缓冲器,i/o控制逻辑,控制和定时寄存器及定时与控制电路,扫描计数器,回复缓冲器,fifo /传感器ram及其状态寄存器,显示ram及显示地址寄存器等组成。
(2)、硬件结构:由存储器,8051系列单片机,交通指示灯等组合。
(3)、交通灯控制系统的原理框图(如图1所示)。
1.定时器定时器由与系统秒脉冲(由时钟脉冲产生器提供)同步的计数器构成,要求计数器在状态信号st作用下,首先清零,然后在时钟脉冲上升沿作用下,计数器从零开始进行增1计数,向控制器提供模5的定时信号ty和模25的定时信号tl。
2.控制器控制器是交通管理的核心,它应该能够按照交通管理规则控制信号灯工作状态的转换。
单片机自动控制交通灯及时间显示资料
单片机自动控制交通灯及时间显示资料单片机自动控制交通灯及时间显示资料交通灯作为城市道路交通管理的重要组成部分,扮演着指导车辆和行人通行的重要角色。
然而,传统的交通信号灯通常采用定时控制方式,忽略了车流量、路况以及行人等复杂的因素,导致往往出现交通拥堵和事故等问题。
单片机技术的出现,为交通信号灯的控制问题提供了解决方案。
本文主要介绍单片机自动控制交通灯及时间显示的资料。
一、单片机自动控制交通灯的原理单片机自动控制交通灯的理论核心是基于交通流量、车速、路况和行人等各种信息,通过单片机控制交通信号灯,主动调节灯光的亮暗程度(或显示时间),提高指示车辆和行人安全通行的效率。
其主要实现过程分为以下三个步骤:1. 采集各种交通数据,包括声光信号、视频数据、车辆和行人的人流量以及环境温度等信息,通过传感器将这些信息转换成数字信号。
2. 针对采集到的数字信号,主控单片机利用内部硬件计算器对这些数据进行计算、分析和处理,并根据处理结果控制一个或多个红、黄、绿灯等交通控制装置。
3. 在单片机的控制下,交通信号灯可以实现红、黄、绿不同颜色的交替闪烁,以实现交通流量的控制,确保道路安全和畅通。
二、单片机自动控制交通灯的实现方案单片机自动控制交通灯的具体实现方案可以根据具体的应用场景进行调整,但原理和大致步骤是相同的。
一般来说,使用单片机自动控制交通灯需要以下硬件设备:1. 主程序控制芯片:一般情况下,可以选择单片机当做控制芯片,如MSP430、STM32等,具备高性能、强韧性、大容量ROM存储等特点。
2. 采集传感器:通过采集环境温度、光照、声音等信息,实时获取道路流量、车速、车辆方向等交通信息。
常用的传感器包括温度传感器、光照传感器、响应传感器、磁敏传感器等。
3. 交通信号灯控制电路:为了实现交通灯的控制,在主程序控制芯片的控制下,需要通过控制电路对交通信号灯进行开关控制。
控制电路可以采用普通的模拟切换电路或数字控制电路,目的在于将单片机输出的控制信号转化为交通灯的各个状态中的电压和电流。
用单片机实现交通灯的控制

用单片机实现交通灯的控制1 系统设计1.1系统设计要求(1)正常情况下,A、B道(A、B道交叉组成十字路口,A是主道,B 是支道)轮流放行,A 道放行60s(其中5s 用于警告),B 道放行30s(其中5s 用于警告)。
(2)一道有车而另一道无车(用按键开关s1、s2 模拟)时,使有车车道放行。
(3)有紧急车辆通过(用按键开关so模拟)时,A、B均为红灯。
1.2系统硬件电路实现(见图1)1.3软件设计(1)软件设计任务:主程序采用查询方式定时,由R2寄存器确定调用0.5s 延时子程序的次数,从而获得交通灯的各种时间。
子程序采用定时器1 方式1 ,查询式定时,定时器定时50ms,R3 寄存器确定50ms循环10次,从而获取0.5s的延时时间。
一道有车另一道无车的中断服务程序首先要保护现场,因需用到延时子程序和P1 口,帮需保护的寄存器有R3、P1、THI 和TL1,保护现场时还需关中断,以防止高优先级中断(紧急车辆通过所产生的中断)出现时导致程序混乱。
然后,开中断,由软件查询P3.0 和P3.1 口.判别哪一道有车,再根据查询情况执行相应的服务。
待交通灯信号出现后,保持5s 的延时,然后关中断,恢复现场,再开中断,返回主程序。
紧急车辆出现时的中断服务程序也需要保护现场,但无需关中断(因其为高优先级中断) ,然后执行相应的服务,待交通灯信号出现后延时20s,确保紧急车辆通过,然后恢复现场,返回主程序。
(2) 源程序设计ORG 0000HAJMP MAINORG 0003HAJMP AAOORG 0013HAJMP AA1ORG0100HMAIN:SETB PXOMOV TCO,N#00HMOV TMO,D#10HMOV IE,#85HDISP:MOV P1,#0F3HMOV R,2 #6EHDISPl :ACALL DELAYDJNZ R2,DISP1 MOV R,2 #06H WARN:l CPL P1.2 ACALLDELAY DJNZ R2,WARN1 MOV Pl,#0F5H MOV R,2 #04HYEL1:ACALL DELAY DJNZ R2,YEL1 MOV P1,#0DEH MOV R,2 #32H DISP2:ACALL DELAY DJNZ R2,DlSP2 MOV R,2#06H WARN:2 CPL P1.5 ACALL DELAY DJNZ R2,WARN2 MOV P1,#0EEH MOV R,2 #04H YEL2:ACALL DELAY DJNZ R2,YEL2 AJMP DISPAA0:PUSH P1PUSH 03HPUSH TH1PUSH TL1MOV P1,#0F6HMOV R,5 #28HDELAY:O ACALL DELAYDJNZ R5,DELAYOPOP TL1POP TH1POP 03HPOP P1RETIAA1:CLR EAPUSH P1PUSH 03HPUSH TH1PUSH TL1SETB EAJNB P3.0 ,BPMOV P1,#0F3HSJMP DELAY1BP:JNB P3.1 ,EXIT MOV P1,#ODEH DELAY:1 MOV R,6 #OAH NEXT:ACALL DELAY DJNZ R6,NEXT EXIT:CLR EAPOP TL1POP TH1POP 03HPOP P1 SETB EARETIDELAY:MOV R3,#0AH MOV TH,1 #3CHMOV TL1,#0BOHSETB TR1LP1:JBC TF1,LP2SJMP LP1LP2:MOV TH,1 #3CH MOV TL1.#OBOH DJNZ R3,LP1RETEND2 结束语用单片机控制的交通灯控制系统比模拟电路有明显优势,即不用对电路有大改动就可以适应新的工作条件,升级也很方便,只需对CPU重新刷写一次程序就可以了。
单片机课程设计示例(交通灯控制)

第四章单片机课程设计示例(交通灯控制)4.1 课题设计内容对基于单片机的交通灯控制系统进行设计。
所设计的系统功能为:以MCS-51系列单片机作为控制核心,在东西南北四个方向设置左拐、右拐、直行及行人4种通行指示灯,用计时器显示路口通行转换剩余时间。
在出现紧急情况时,可以由交警手动实现全路口车辆禁行而行人通行状态,在特种车辆如119、120通过路口时,系统可自动转为特种车辆放行,其他车辆禁止通行状态。
4.2 设计方案论证根据设计内容要求,提出了如下三种方案:方案一:采用40脚、片内带8kB Flash ROM的AT89S52单片机作为控制核心,采用四组高亮红绿双色二极管作为东西南北四个路口的通行指示灯,采用四组3位LED数码管作为四个路口的通行倒计时显示器,LED显示采用动态扫描方式,以节省端口数。
方案一结构框图如图4-1所示,按照这种结构设计,单片机端口资源刚好满足要求。
复位晶振RSTX1 X2特种车辆检测INT1手动自动/控制转换P3.7AT89S52组)南北通行灯(2组)东西通行灯(2显示位LED3列扫描驱动口P1口P2口P0口P3图4-1 方案一:采用LED动态扫描的交通灯控制系统结构框图方案二:采用20脚、片内带2kB Flash ROM的AT89C2051单片机作为控制器,左拐、右拐、直行及行人4种通行指示采用16×16点阵双色LED发光管,通行倒计时显示也采用16×16点阵LED发光管。
LED点阵的列驱动采用74LS595,以实现串行端口扩展,行译码采用4/16译码器74LS154,74LS154生成16条行选通信号线,每条行线上需要较大的驱动电流,选用大功率三极管作为驱动管。
方案二结构框图如图4-2所示,方案三:采用AT89C2051单片机作为控制器,左拐、右拐、直行、行人通行指示及通行倒计时指示采用单块LCD液晶点阵显示器。
三种方案的特点比较如下:方案一具有电路简单,设计方便,显示亮度高,耗RXD TXD 列驱动器LS59574LED 双色显示点阵)7(个每个路口行译码器154LS 74口I/O AT89C2051......行驱动器...图4-2 方案二:采用16×16点阵LED 发光管设计的交通灯控制系统结构框图电较少,可靠性高等特点;方案二的图案显示逼真,单片机占用端口资源少,缺点是需要大量的硬件,电路复杂,耗电量大,不太适合于模型制作;方案三设计占用单片机的端口最少,硬件也少,耗电也最少,虽然显示图案也很精美,但由于亮度太暗,晚上还得开背光灯,不够实用。
基于单片机交通灯的控制
基于单片机交通灯的控制交通灯是城市交通中最常见和最重要的控制信号装置,用于指示道路交通的正常通行、减缓交通流量、指挥交通等作用,是保障城市道路交通安全和畅通的必要措施。
随着单片机技术的快速发展,基于单片机交通灯的控制方案已经被广泛应用于城市交通管理中。
本文将详细介绍基于单片机交通灯的控制的相关知识。
一、单片机交通灯的控制原理单片机交通灯的控制原理分为两个部分:信号控制和定时控制。
信号控制:信号控制是交通灯控制的重点,在交通灯控制中有三组信号灯,分别是红灯、黄灯和绿灯。
红灯指示交通信号禁止通行,黄灯指示交通信号即将变为红色,警示车辆停车或减速,绿灯指示交通信号可以通行。
在信号控制中,单片机通过数字信号输出口控制红灯、黄灯、绿灯的点亮和熄灭顺序,实现交通道路的正常通行。
定时控制:定时控制是交通灯控制的关键,通过定时控制可以确保交通信号灯按规定时间间隔依次点亮和熄灭。
在单片机控制系统中,通过定时器和定时中断方式来实现交通灯控制的定时功能。
二、单片机交通灯的控制系统单片机交通灯的控制系统由下列四个部分组成:单片机系统、信号控制器、信号灯组和电源系统。
1、单片机系统:在单片机控制系统中,单片机是主控制器,控制信号控制器和信号灯组的运行。
单片机需要通过编程控制信号控制器和信号灯组的照明和熄灭。
2、信号控制器:信号控制器是指用于控制信号灯的电路,其接收单片机发出的命令来控制交通信号灯的点亮和熄灭,实现交通信号灯的正常运行。
3、信号灯组:信号灯组是指在交通灯控制中的红灯、黄灯和绿灯,其通过灯罩和信号控制器形成成品交通灯,用于指示车辆和行人的行驶或行走指导,保障道路交通的安全畅通。
4、电源系统:电源系统包括直流电源和备用电源,其为交通灯控制系统提供稳定、安全、有效的电能,保障交通信号灯的正常运转。
三、单片机交通灯的控制程序单片机交通灯控制程序主要分为三个部分:定时程序、信号控制程序和主程序。
1、定时程序:定时程序主要用于实现交通灯控制的时间间隔,通过定时器和定时中断方式实现控制,控制红灯、黄灯和绿灯的运行。
单片机实例--交通灯信号控制(DOC)

按住ctrl并鼠标单击这里学习更多优质的单片机视频课程实例A 交通灯信号控制本章在交通灯信号控制设计中,综合利用了单片机的定时器功能和多种中断功能。
A.1 采用定时器延时功能说明:利用单片机内的定时器功能进行延时,使接在P1.5引脚上的LED点亮后连续亮10s再熄灭,熄灭3s后再被点亮,不断循环。
A.1.1 硬件设计图A.1 实验电路║14 51单片机开发入门与典型实例(第2版)单片机实验电路的左侧部分为单片机最小系统电路:5V直流电源、单片机时钟电路和自动复位电路。
右侧P1端口中P1.5引脚接有LED用作程序功能显示。
A.1.2 程序设计1.工作原理(1)首先设置定时器工作模式。
TMOD = 0x01; /*设定T0为模式1 */(2)设置定时器初始值。
当定时器定时时间为50ms时,其初始值如下。
TH0 = -(50000/256); /*定时初始值为50000 */TL0 = -(50000%256);(3)启动定时器。
TR0 = 1;(4)检测定时器溢出标志TF0。
while(TF0! = 1); /* TF0为1则表示定时时间到了*/每次定时时间为50 ms,定时20次延时的时间为1s。
2.程序C51语言编写的使用定时器延时源程序JT 21-1.c代码如下:01 #include <AT89X51.H> /*头文件*/02 void delay50ms(unsigned int i); /*声明延时函数delay50ms() */03 /* ----------------- 主函数 -----------------*/04 main( ) /*主函数*/05 {06 TMOD = 0x01; /*设定T0为模式1 */07 for(; ;) /*无限循环*/08 {09 P1 = 0xdf; /*输出*/10 delay50ms(200); /*调用延时函数,延时10s */11 P1 = 0xff; /*输出*/12 delay50ms(60); /*调用延时函数,延时3s */13 }14 }15 /* ----------------- 延时函数 ----------------- */16 void delay50ms(unsigned int i) /*延时时间为50ms i */17 {18 TR0 = 1; /*启动定时器*/实例A 交通灯信号控制15║19 while(i! = 0) /*执行i次循环*/20 {21 TH0 = -(50000/256); /*定时器初始值50000 */22 TL0 = -(50000%256);23 while(TF0! = 1); /*等待计数终了*/24 TF0 = 0; /*清除TF0 */25 i--; /*循环数-1 */26 }27 TR0 = 0; /*关闭定时器*/28 }A.1.3 代码详解01:头文件。
基于单片机的智能交通灯

基于单片机的智能交通灯简介智能交通灯是利用单片机等技术来实现的交通灯控制系统。
传统的交通灯系统通常使用固定的时间间隔控制红绿灯的切换,但这种方式无法根据实际交通状况进行调整,导致交通堵塞和浪费资源。
而基于单片机的智能交通灯系统可以根据实时交通情况智能地调整信号灯的切换时间,以提高交通效率和优化交通流。
系统组成基于单片机的智能交通灯系统主要由以下几个组成部分构成:1.单片机控制板2.光电传感器3.红绿灯信号灯4.交通流量检测器单片机控制板单片机控制板是智能交通灯系统的核心部件,它负责接收传感器信号,并根据预设的算法来控制交通灯的切换。
可以选择使用多种单片机,如Arduino、树莓派等。
光电传感器光电传感器是用来检测车辆或行人是否经过的传感器。
它通常由发射器和接收器组成,发射器发出光束,当有物体遮挡光束时,接收器会收到反射的光信号,从而触发传感器的输出信号。
红绿灯信号灯红绿灯信号灯是交通灯系统中至关重要的部分。
它通过红、黄、绿三种颜色的灯光提示交通参与者知道何时停车和何时通行。
交通流量检测器交通流量检测器用于检测交通流量,可以使用多种技术实现,例如使用车辆传感器或摄像头进行车辆计数。
工作原理1.系统启动后,单片机控制板开始运行,并初始化各个传感器和灯光。
2.光电传感器不断监测道路上交通流量的情况,并将检测到的信号传输给单片机控制板。
3.单片机控制板根据接收到的交通流量信号和预设的算法来判断是否需要进行红绿灯的切换。
4.单片机控制板控制红绿灯信号灯按照规定的时间间隔进行切换,并向交通参与者显示相应的信号。
5.交通流量检测器不断监测交通流量的变化,并将检测结果传输给单片机控制板。
6.单片机控制板根据接收到的交通流量变化情况,动态调整红绿灯的切换时间,以适应实时交通状况。
功能特点1.实时监测道路上的交通流量,避免交通堵塞。
2.动态调整信号灯的切换时间,优化交通流。
3.提供良好的交通参与者体验,减少等待时间。
单片机交通信号灯控制系统

目录单片机交通信号灯控制系统设计 (1)一、设计目的与意义 (1)二、设计内容和要求 (1)三、常见交通信号灯系统概述: (1)四、系统硬件设计方案 (2)五、原理图设计 (2)1、硬件设计框图: (2)2、最小系统原理图: (2)3、电源电路: (3)4、交通灯电路图: (3)5、倒计时显示电路: (4)6、拨码开关电路: (5)7、整个系统的电路图: (6)六、软件设计方案 (6)七、程序及注释 (7)八、设计心得 (10)单片机交通信号灯控制系统设计一、设计目的与意义1、通过用51单片机控制交通灯的课程设计,熟练51单片机的编程方法。
2、通过本课程的设计,进一步掌握I/O接口设计和常用程序设计技术,掌握单片机控制系统的设计的一般方法,能根据系统设计要求,完成应用系统的硬件和软件设计。
3、通过本课程设计将理论用于实践,提高动手能力。
二、设计内容和要求交通灯控制系统控制东西、南北两个方向信号灯,每个方向设置两组红绿灯,红灯禁止通行,绿灯允许通行。
每个方向的通行时间各由两位LED数码显示,通行时间可设置,绿灯向红灯转换前绿灯闪烁三次共3秒钟,红灯向绿灯过渡时不闪烁。
系统上电时的初始状态为东西、南北两个方向均为红灯,持续2秒后为东西方向绿灯,南北方向红灯,之后以定时方式控制两个方向的汽车轮流通行。
三、常见交通信号灯系统概述:交通信号灯是交通信号中的重要组成部分,是道路交通的基本语言。
交通信号灯由红灯(表示禁止通行)、绿灯(表示允许通行)、黄灯(表示警示)组成。
绿灯信号是准许通行信号。
按《交通安全法实施条例》规定:绿灯亮时,准许车辆、行人通行,但转弯的车辆不准妨碍被放行的直行车辆和行人通行。
红灯信号是绝对禁止通行信号。
红灯亮时,禁止车辆通行。
右转弯车辆在不妨碍被放行的车辆和行人通行的情况下,可以通行。
红灯信号是带有强制意义的禁行信号,遇此信号时,被禁行车辆须停在停止线以外,被禁行的行人须在人行道边等候放行;机动车等候放行时,不准熄火,不准开车门,各种车辆驾驶员不准离开车辆;自行车左转弯不准推车从路口外边绕行,直行不准用右转弯方法绕行。
单片机控制的交通灯设计

单片机控制的交通灯设计
一、引言
交通灯是控制交通流量的有效途径,它能有效减少交通拥堵,提高交
通安全。
现代交通灯基本要求有简单的控制逻辑,因此可以利用单片机来
控制交通灯。
单片机控制的交通灯由单片机、绿灯、黄灯、红灯和控制电
路等组成,可以根据设定的定时、定周期等各种状态开关控制,从而有效
控制交通流量,提高交通安全。
本文重点介绍了单片机控制的交通灯原理、构成、工作原理和应用,为实现对交通灯的自动化控制提供依据。
二、单片机控制的交通灯原理
单片机控制的交通灯是以单片机为核心,由绿灯、黄灯和红灯这三个
部件为标志牌,以及智能控制电路为辅助构成的一套交通灯系统。
其原理
简单说来,就是将一定的信号变成一定的控制信号来控制交通灯的开关信号,以达到自动化控制的效果。
三、单片机控制的交通灯构成
单片机控制的交通灯由单片机、绿灯、黄灯、红灯和控制电路等组成。
单片机作为核心,用于接收输入信号,并将信号转换为相应的控制信号;
绿灯、黄灯和红灯分别为标志牌,用以指示车辆前行、慢行或停止;控制
电路用于控制绿黄红灯的亮灭,实现整套交通灯的控制。
四、单片机控制的交通灯工作原理。
C51单片机的交通灯控制系统.
基于C51单片机的交通灯控制系统1、实验方案论证:进行十字路口的交通信号灯控制电路设计,画出电路原理图及实验电路图,进行软件编程、以及使用说明文档的建立等一整套工作任务。
进行十字路口的交通信号灯控制程序设计,提交一个符合上述功能要求的十字路口的交通信号灯控制系统设计。
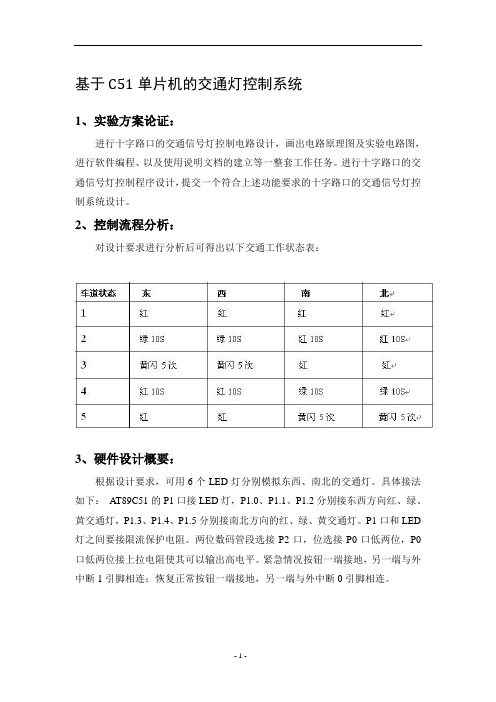
2、控制流程分析:对设计要求进行分析后可得出以下交通工作状态表:3、硬件设计概要:根据设计要求,可用6个LED灯分别模拟东西、南北的交通灯。
具体接法如下:AT89C51的P1口接LED灯,P1.0、P1.1、P1.2分别接东西方向红、绿、黄交通灯,P1.3、P1.4、P1.5分别接南北方向的红、绿、黄交通灯。
P1口和LED 灯之间要接限流保护电阻。
两位数码管段选接P2口,位选接P0口低两位,P0口低两位接上拉电阻使其可以输出高电平。
紧急情况按钮一端接地,另一端与外中断1引脚相连;恢复正常按钮一端接地,另一端与外中断0引脚相连。
三、原理图设计1、LED显示部分电路设计:把单片机AT89C51的P1口作为红黄绿灯显示部分,用6个LED灯分别模拟东西、南北的交通灯。
P1.0、P1.1、P1.2各通过一个300Ω的限流保护电阻接东西方向的红、绿、黄LED灯;P1.3、P1.4、P1.5各通过一个300Ω的限流保护电阻接南北方向的红、绿、黄LED灯。
LED灯的一端接电源,另一端经电阻接P1口,因此当P1口引脚输出低电平时LED灯发光,即此方案采取低电平驱动方式。
具体电路如下:2、紧急情况处理电路设计:紧急情况按钮一端接地,另一端与外中断1引脚相连;恢复正常按钮一端接地,另一端与外中断0引脚相连。
在程序设计时,我会将其设置为下降沿触发方式。
具体电路如下:3、数字显示电路设计:选用共阴极两位数码管。
两位数码管A~G引脚各通过一个300Ω的限流保护电阻分别接P2.0~P2.6,位选1引脚和2引脚分别接P0.0口低两位,P0口低两位接5kΩ的上拉电阻使其可以输出高电平。
单片机控制十字路口交通灯

设计题目:十字路口交通灯控制2一、要求1、通过LED控制四个路口的红黄绿灯的变化。
2、绿灯表示通行,红灯表示停止,黄灯表示等待。
3、每次绿灯变红灯时黄灯先亮五秒,此时另外干道上的红灯不变。
4、每次变化时绿灯闪烁五次。
二、分析课程设计采用实验室的单片机作为主控来实现十字路口交通灯的变化规律,十字路口的红绿灯交替变化,用双色发光二级管来模拟交通灯变化,使用定时器/计数器0作为定时器,从P1和P3口输出。
三、设计1、硬件设计(包括设计方案及说明、完整的硬件连接图等)(1)因为本实验是交通灯控制实验,所以要先了解交通灯的变化规律。
假设一个十字路口为东西和南北方向,初始状态是状态0(各个路口都是红灯);首先是状态1(东路口通车,其他路口红灯);过一段时间装入状态2(东路口绿灯闪几次转黄灯亮,延时几秒,其他路口仍然红灯);再转入状态3(南路口绿灯亮,其他路口红灯亮);过一段时间转入状态4(南路口绿灯闪几次转黄灯亮,延时几秒,其他路口仍然红灯);再转入状态5(西路口绿灯亮,其他路口红灯亮);过一段时间转入状态6(西路口绿灯闪几次转黄灯亮,延时几秒,其他路口仍然红灯);再转入状态7(北路口绿灯亮,其他路口红灯亮);过一段时间转入状态8(北路口绿灯闪几次转黄灯亮,延时几秒,其他路口仍然红灯);最后循环至状态1。
(2)各用一组红黄绿色LED分别表示东南西北方向。
(3)由定时器来产生通车延时时间,时间间隔为5s。
(4)用软件延时方法产生“闪”延时时间。
说明:用CPU的P1口和P3口输出控制信号,控制12个LED灯(红、黄、绿),模拟交通灯的管理。
各个输出口对应的IOP1.0·····LED00P1.1·····LED01 P1.2·····LED02 P1.3·····LED03 P1.4·····LED04 P1.5·····LED05 P1.6·····LED06 P1.7·····LED07 P3.2·····LED08 P3.3·····LED09 P3.4·····LED10 P3.5·····LED112、软件编程(包括流程图、完整的汇编源程序及其注释) 程序流程图如图1所示:程序如下:#include<reg52.h>sfr light_address_1=0x90;sfr light_address_2=0xB0;sbit red_e=P1^0;sbit yellow_e=P1^1;sbit green_e=P1^2;sbit red_s=P1^3;sbit yellow_s=P1^4;sbit green_s=P1^5;sbit red_w=P1^6;sbit yellow_w=P1^7;sbit green_w=P3^2;sbit red_n=P3^3;sbit yellow_n=P3^4;sbit green_n=P3^5;bit light_up=0;bit light_down=1;unsigned char light_down_all=0xff; unsigned char count=0;void delay_MS(unsigned char data0); void Init_timer0(void);void light_state1();void light_state2();void light_state3();void light_state4();void light_state5();void light_state6();void light_state7();void light_state8();void main(){Init_timer0();while(1){light_address_1=light_down_all;light_address_2=light_down_all;light_state1();light_address_1=light_down_all;light_address_2=light_down_all;light_state2();light_address_1=light_down_all;light_address_2=light_down_all;light_state3();light_address_1=light_down_all;light_address_2=light_down_all;light_state4();light_address_1=light_down_all;light_address_2=light_down_all;light_state5();light_address_1=light_down_all;light_address_2=light_down_all;light_state6();light_address_1=light_down_all;light_address_2=light_down_all;light_state7();light_address_1=light_down_all;light_address_2=light_down_all;light_state8();}}void light_state1() //东路口绿灯亮,其他路口红灯亮{ red_s=light_up;red_w=light_up;red_n=light_up;green_e=light_up;count=0;while(count<100){ }}void light_state2() //东路口绿灯闪几次转黄灯亮,延时几秒,其他路口红灯任然亮{unsigned char j;red_s=light_up;red_w=light_up;red_n=light_up;for(j=0;j<5;j++){green_e=light_up;delay_MS(500);green_e=light_down;delay_MS(500);}yellow_e=light_up;count=0;while(count<20){ }}void light_state3() //南路口绿灯亮,其他路口红灯亮{green_s=light_up;red_e=light_up;red_w=light_up;red_n=light_up;count=0;while(count<100){ }}void light_state4() //南路口绿灯闪几次转黄灯亮,延时几秒,其他路口红灯亮{unsigned char j;red_e=light_up;red_w=light_up;red_n=light_up;for(j=0;j<5;j++){green_s=light_up;delay_MS(500);green_s=light_down;delay_MS(500);}yellow_s=light_up;count=0;while(count<20){ }}void light_state5() //西路口绿灯亮,其他路口红灯亮{red_e=light_up;red_s=light_up;red_n=light_up;green_w=light_up;count=0;while(count<100){ }}void light_state6() //西路口绿灯闪几次转黄灯亮,其他路口红灯{unsigned char j;red_e=light_up;red_s=light_up;red_n=light_up;for(j=0;j<5;j++){green_w=light_up;delay_MS(500);green_w=light_down;delay_MS(500);}yellow_w=light_up;count=0;while(count<20){ }}void light_state7() //北路口绿灯亮,其他路口红灯亮{red_e=light_up;red_s=light_up;red_w=light_up;green_n=light_up;count=0;while(count<100){ }}void light_state8() //北路口绿灯闪几次转黄灯亮,其他路口红灯亮{unsigned char j;red_e=light_up;red_s=light_up;red_w=light_up;for(j=0;j<5;j++){green_n=light_up;delay_MS(500);green_n=light_down;delay_MS(500);}yellow_n=light_up;count=0;while(count<20){ }}void delay_MS(unsigned char data0){unsigned char i,j;for(i=0;i<data0;i++)for(j=0;j<120;j++);}void Init_timer0(void){TMOD=0x01;TH0=0x3c;TL0=0xb0;EA=1;ET0=1;TR0=1;}void Timer0_int() interrupt 1{count++;TH0=0x3c;TL0=0xb0;}3、调试说明在实验室将程序输入电脑进行编译,连接好试验箱上的P1口和P3口与各个LED灯的连线后,将程序通过STC下载软件下载到单片机中,然后上电运行,观察各个LED灯的变化,通过调试,能够达到实验要求,各个LED灯交替闪烁变化,实现交通灯的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国矿业大学徐海学院单片机系统设计与制作技术报告姓名:珂曼青学号: ******** 班级:自动化12-3题目:单片机控制交通灯任课教师:**2013 年9月单片机设计与制作任务书班级自动化12-3 学号******** 学生珂任务下达日期:年月日设计日期:年月日至年月日设计题目:单片机控制交通灯教师签字:单片机控制交通灯目录1 概述.................................................. 错误!未定义书签。
1.1交通灯的历史背景和意义 (4)1.2交通灯的发展与现状 (4)2 课题方案设计 (6)2.1系统总体设计要求 (6)2.2系统模块结构论证 (6)3 系统硬件设计.......................................... 错误!未定义书签。
3.1总体设计 (7)3.3系统时钟电路 (9)3.4系统复位电路 (10)3.5信号灯电路 (10)4 系统软件的设计 (12)4.1程序流程图 (12)4.2红绿灯参考程序流程图 (13)5 软硬件调试及调试结果 (14)5.1软硬件调试中出现的问题及解决措施 (14)5.1.1 硬件调试 (15)5.1.2 软件调试 (15)5.2实物图 (15)5.3调试结果 (16)结束语 (18)参考文献 (18)附录 (18)附录1基于单片机的交通灯设计原理图 (18)附录2基于单片机的交通灯设计PCB图 (19)附录3P ROTEUS仿真图 (20)附录4基于单片机的交通灯设计C语言程序清单 (20)附录5基于单片机的交通灯设计元器件目录表 (22)1 概述1.1 交通灯的历史背景和意义随着社会经济的发展,城市交通问题越来越引起人们的关注。
人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。
城市交通控制系统是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。
所以,如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市高速公路,缓解主干道与匝道、城市同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。
交通灯是城市活动的命脉,对于城市经济发展、人民生活水平的提高起着十分重要的作用。
城市交通问题是困扰城市发展、制约城市经济建设的重要因素,城市道路增长的有限与车辆增加的无限这一矛盾是导致城市交通拥挤的根本原因。
城市街道网络上的交通容量的不断增加,表明车辆对道路容量的要求仍然很高,短期还不可改变。
自从开始用计算机控制系统后,不管在控制硬件里取得什么样的实际发展,交通控制领域的控制逻辑方面始终没能取得重大突破。
可以肯定的说,对于减轻交通拥塞及其副作用特别是对于大的交通网络而言,仍然缺乏一种真正的交通响应控制策略。
计算机硬件能力与控制软件能力很不相符,由此造成的影响是很多交通控制策略根本不能实现。
在少数几个例子中,一些新的控制策略确实能得以实现,但它们却没能对早期的控制策略进行改进。
由于缺乏能提高交通状况,特别是缺乏拥塞网络交通状况的实时控制策略,几乎可以说真正成熟的控制策略仍然不存在。
集成化和智能化是城市交通信号控制系统的发展趋势和研究前沿,而针对交通系统规模复杂性特征的控制结构和针对城市交通瓶颈问题并代表智能决策的阻塞处理则是智能交通控制优化管理的关键和突破口。
因此,研究基于智能集成的城市交通信号控制系统具有相当的学术价值和实用价值。
把智能控制引入到城市交通控制系统中,未来的城市交通控制系统才能适应城市交通的发展。
从长远来看,该研究具有重要的现实意义。
1.2交通灯的发展与现状随着城市经济的发展,城市现代化程度不断提高,交通需求和交通量迅速增长,城市交通网络通拥挤日益严重,道路运输所带来的交通拥堵、交通事故和环境污染等负面效应也日益突出,逐步成为经济和社会发展中的全球性共同问题。
交通问题已经日益成为世界性的难题,城市交通事故、交通阻塞和交通污染问题愈加突出。
为了解决车和路的矛盾,常用的有两种方法:一是控制需求,最直接的办法就是限制车辆的增加;二是增加供给,也就是修路。
但是这两个办法都有其局限性。
交通是社会发展和人民生活水平提高的基本条件,经济的发展必然带来出行的增加,而且在我国汽车工业正处在起步阶段时期,因此限制车辆的增加不是解决问题的好办法。
而采取增加供给,即大量修筑道路基本设施的方法,在资源、环境矛盾越来越突出的今天,而对越来越拥挤的交通,有限的资源和财力以及环境的压力,也将受到限制。
这就需要依靠除限制需求和提供道路设施之外的其他方法来满足日益增长的交通需求。
交通系统正是解决这一矛盾的途径之一。
智能交通系统是将先进的信息技术、数据通信技术、电子传感技术、电子控制技术及计算机处理技术等有效的集成运用于整个地面交通运输管理系统。
对城市交通流进行智能控制,可以使道路顺畅,提高交通效率。
合理进行交通控制可以对交通流进行有效的引导和调度,使交通保持在一个平稳的运行状态,从而避免或缓和交通拥挤状况。
大大提高交通运输的运行效率。
还可以减少交通事故,增加交通安全,降低污染程度,节省能源消耗,本文就是通过对交叉路口交通信号的只能控制,达到优化路口交通流的目的。
交通系统作为一个时变的、具有随机性的复杂系统,传统的人为设定多嘴方案或是建立各种预测模型均比较困难。
城市交通控制研究的起源比较早,1868年,英国伦敦燃气信号灯的问世,标志着城市交通控制的开始。
1913年,在美国俄亥俄州的Cleveland市出现了世界上最早的交通信号控制。
1926年美国的芝加哥市采用了交通灯控制方案,每个交叉口设有唯一的交通灯,适用于单一的交通流。
从此,交通控制技术和相关的控制算法得到了发展和改善,提高了交通控制的安全性、有效性,并减少了对环境的影响。
进入20世纪70年代,随着计算机技术和自动控制技术的发展,已经交通流理论的不断完善,交通运输组织与优化理论和技术水平不断提高,控制手段越来越先进,形成了一批高水平有实效的城市道路交通控制系统。
早在1977年,Pappis等人就将模糊控制运用到交通控制上,通过建立规则库或是专家系统对各种交通状况进行模糊控制,并取得了很好的效果。
近年来,欧美日本等相继建立了智能交通控制系统。
在这些系统中,大部分在路口附近安装磁性环路检测器,还使用了新型检测器等技术和设备。
这些现代化设备技术加上控制理论和现代化科学管理技术,似的交通控制系统日益完善。
随着一些研究控制理论的学者投身到交通控制的研究中,在交通信号控制领域提出了一些新方法、新思路。
如静态多段配时控制、准动态多段配时控制、最优控制、大系统递阶控制、模糊控制、神经网络控制、网络路由控制等。
模糊交通控制已经成为了交通信号控制的上流方向之一。
虽然模糊控制能有效处理模糊信息,但是产生的规则比较粗糙,利用规则表进行控制,运算速度虽然比较快但没有自学习功能。
而且这些研究有些似乎相序固定为前提,不能保证相序与实际交通流状况的一致性,影响了绿灯时间的利用率。
有些研究则提出了可变相序的模糊控制方法,提高了绿灯时间的利用率,弥补了相序固定的缺点,但同时也存在一些不足。
例如目前应用比较好的交通系统:SCOOT(经典交通系统),它们都是主要采用统计模型和经典算法。
但城市交通系统是一个复杂的、随机性很强的巨型系统,要想建立实用性较强的数学模型是十分困难的。
利用模糊控制智能控制技术进行交叉口信号灯控制能取得比定时控制与感应控制更好的效果,是今后单交叉路口信号灯控制的主要研究方向。
目前,国的交通灯一般设在十字路口,在醒目位置用红、黄、绿三种颜色的指示灯。
对于一般情况下的安全行车,车辆分流尚能发挥作用,但根据实际行车过程中出现的情况,还存在缺点:两车道的车辆轮流放行的时间相同且固定,在十字路口,经常一个车道为主干道,车辆较多,放行时间应该长些;另一车道为副干道,车辆较少,放行时间应该短些。
2 课题方案设计2.1 系统总体设计要求因东西同属一个车道,南北也同属一个车道,因此控制一边的灯就可以了,现象一样。
1、东西路口的绿灯亮,南北路口的红灯亮,东西路口方向通车。
2、延时一段时间后,东西路口的绿灯熄灭,黄灯开始延时并开始闪烁,闪烁三次后,东西路口的红灯亮,同时南北路口的绿灯亮,南北方向开始通车。
3、延时一段时间后,南北路口的绿灯熄灭,黄灯开始延时并开始闪烁,闪烁三次后,再切换到东西路口方向。
4、之后一直重复以上三步。
2.2 系统模块结构论证图2-1 系统的总体框图3 系统硬件设计3.1 总体设计实现本设计要求的具体功能,可以选用AT89C52单片机及外围器件构成最小控制系统,12个LED 分成四组红黄绿三色灯构成信号灯指示模块。
3.2 单片机运行的最小系统T2/P1.0T2EX/P1.1P1.3P1.2RxD/P3.0TxD/P3.1INT0/P3.2INT1/P3.3T0/P3.4T1/P3.5WR/P3.6RD/P3.7XTAL2XTAL1GND RST P1.7P1.6P1.5P1.4P2.2/A10P0.0/AD0P0.1/AD1P0.2/AD2EA/VPP ALE/PROG PSEN P2.0/A8P2.1/A9P2.3/A11P2.4/A12P2.5/A13P2.6/A14P2.7/A15P0.7/AD7P0.6/AD6P0.5/AD5P0.4/AD4P0.3/AD3VCC图3-1 ST89C52引脚结构单片机的最小系统由电源、晶振、复位、/EA=1组成,下面介绍每一个组成部分。
1、电源引脚GND 20 接地端Vcc 40 电源端(工作电压为5V ) 2、外接晶体引脚 XTAL1 19 XTAL2 183、复位RST 94、输入输出引脚(1)P0端口[P0.0-P0.7]P0是一个8位漏极开路型双向I/O端口,端口置1,(对端口写1)时作高阻抗输入端,作为输出口时能驱动8个TTL。
对部Flash程序存储器编程时,接受指令字节;校验程序时输出指令字节,要求外接上拉电阻。
在访问外部程序和外部数据存储器时,P0口是分时转换的地址(低8位)/数据总线,访问期间部的上拉电阻起作用。
(2)P1端口[P1.0-P1.7]P1是一个带有部上拉电阻的8位双向I/O端口。
输出时可驱动4个TTL。
端口置1时,部上拉电阻将端口拉到高电平,作输入用。
对部Flash程序存储器编程时,接收低8位地址信息。
(3)P2端口[P2.0-P2.7]P2是一个带有部上拉电阻的8位双向I/O端口。
输出时可驱动4个TTL,端口置1时,部上拉电阻将端口拉到高电平,作输入用。
对部Flash程序存储器编程时,接收高8位地址和控制信息。
在访问外部程序和16位外部数据存储器时,P2口送出高8位地址。