轮式移动机械臂的建模与仿真研究
带拖车的轮式移动机器人系统的建模与仿真

系统仿真学报JOURNAL OF SYSTEM SIMULATION2000 Vol.12 No.1 P.43-46带拖车的轮式移动机器人系统的建模与仿真杨凯 黄亚楼 徐国华摘 要: 带拖车的轮式移动机器人系统是一种典型的非完整、欠驱动系统。
本文建立了带多个拖车的移动机器人系统的运动学模型,对系统的运动特性进行了分析,并在此基础上对系统的运动进行了数值仿真和图形仿真,验证了理论分析的正确性。
关键词: 移动机器人系统; 运动学模型; 龙格-库塔法; 计算机仿真中图分类号: TP242.3 文献标识码:A文章编号:1004-731X (2000) 01-0043-4Modeling and Simulation of Tractor-trailorRobot Systems' KinematicsYANG Kai, HUANG Ya-lou(Department of Computer and System Science, Nankai University, Tianjin 300071)XU Guo-hua(Institute of Automation, Chinese Academy of Sciences, Beijing 100080,China) Abstract: A mobile robot with multi-trailers is a typical nonholonomic, underactuated system. This paper establishes a kinematic model for such system. Based on the kinematic model, the motion of the system is analytically studied, and the simulation of the motion for this system is conducted with the means of Runge-Kutta method and computer graphics. It proves that the theoretical analysis is right.Keywords: mobile robot; underactuated system; Runge-Kutta; computer simulation1 引言 移动机器人是机器人学中的一个重要分支,本文所讨论的是一种特殊类型的移动机器人系统——带拖车的轮式移动机器人(Tractor-trailer robot),它由一系列相互铰链在一起的多个二轮式刚体小车组成,运行在一个平面上。
机械臂仿真分析的七个步骤及流程及注意事项

机械臂仿真分析的七个步骤及流程及注意事项下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!机械臂仿真分析的七个步骤及流程及注意事项机械臂仿真分析是现代工程设计中重要的一环,通过仿真可以评估机械臂在各种工作条件下的性能表现,优化设计方案并减少实际试验成本。
机械运动控制系统的动态建模与仿真分析
机械运动控制系统的动态建模与仿真分析引言:机械运动控制系统是工业和生活中的重要组成部分,它能够实现运动控制、定位和调节等功能。
动态建模与仿真分析是理解和优化机械运动控制系统的关键步骤。
本文将介绍机械运动控制系统的动态建模方法以及仿真分析的重要性。
一、机械运动控制系统动态建模方法机械运动控制系统的动态建模是基于控制理论和动力学原理的。
常见的动态建模方法包括基于拉普拉斯变换的传递函数法和基于差分方程的状态空间法。
1. 传递函数法传递函数法是一种常用的机械运动控制系统动态建模方法。
它通过建立控制系统的输入-输出关系,描述系统的传递特性。
在这种方法中,机械运动控制系统被建模为一个线性时不变系统,可以方便地进行频域分析和控制器设计。
2. 状态空间法状态空间法是另一种常见的机械运动控制系统动态建模方法。
它通过描述系统的状态和控制量的关系,提供了系统的全局信息。
状态空间法更加适用于复杂的非线性系统,并且可以通过仿真软件进行更为准确的仿真分析。
二、动态建模与仿真分析的重要性动态建模与仿真分析是改进机械运动控制系统的关键步骤。
通过建立准确的动态模型,可以准确预测系统的响应和性能指标。
仿真分析可以帮助设计师优化控制策略和参数设置,从而提高系统的稳定性、精度和效率。
1. 预测系统性能动态建模和仿真分析可以预测机械运动控制系统的性能,并评估不同控制策略的有效性。
通过仿真分析,可以确定系统的频率响应、阻尼特性以及系统的稳定性。
这些信息对于系统设计和改进非常重要。
2. 优化控制参数仿真分析可以通过改变控制参数,找到最优的控制策略。
例如,可以通过仿真分析确定合适的控制增益、采样周期等参数,从而提高系统的响应速度和抗干扰能力。
通过优化控制参数,可以避免实际试验中的大量试错,降低成本和风险。
3. 分析故障和异常动态建模与仿真分析还可以帮助工程师识别和分析系统故障和异常情况。
通过仿真,可以模拟机械运动控制系统在不同故障条件下的响应,预测故障对系统性能的影响,并提供相应的改进方案。
solidworks机械臂运动仿真注意事项

Solidworks机械臂运动仿真注意事项简介Solidworks是一种强大的三维建模软件,具有广泛应用于机械工程和制造工业的功能。
机械臂是一种常见的工业机器人系统,用于执行各种复杂的任务。
在进行机械臂的设计和制造之前,进行仿真是非常重要的,可以帮助我们验证设计方案、识别潜在问题和优化机械臂的性能。
本文将介绍Solidworks机械臂运动仿真的注意事项。
1. 模型设计在进行机械臂的运动仿真之前,首先需要进行模型的设计。
模型设计要求准确、精细,模型的尺寸、结构和材料等要与实际机械臂相符。
同时,还需要考虑到机械臂的运动范围、工作负载和速度等因素,确保模型设计满足仿真需求。
2. 运动仿真设置在Solidworks中,设置机械臂的运动仿真是关键步骤之一。
仿真设置包括机械臂的关节、运动学和动力学参数等。
在进行机械臂的运动仿真前,需要确保设置的参数准确、合理,以保证模拟的真实性和准确性。
3. 约束条件在进行机械臂的运动仿真时,需要考虑机械臂的约束条件。
约束条件可以限制机械臂的运动范围,仿真过程中遵循现实情况下机械臂的运动限制。
例如,固定基座、限定关节的运动范围等。
4. 轨迹规划在机械臂的运动仿真中,轨迹规划是一个重要的步骤。
轨迹规划可以定义机械臂末端执行器的路径,使机械臂能够按照预定的轨迹进行运动。
轨迹规划需要考虑到机械臂的工作任务和工作环境,并根据需求进行优化。
5. 碰撞检测碰撞检测是机械臂运动仿真中一个重要的环节。
在进行仿真之前,需要对机械臂的各个部件进行碰撞检测,以避免在真实运动中发生碰撞。
Solidworks提供了碰撞检测功能,可以帮助我们及时发现和解决潜在的碰撞问题。
6. 运动分析和优化运动仿真完成后,可以对仿真结果进行分析和优化。
运动分析可以帮助我们了解机械臂的运动性能,如速度、加速度和力矩等。
根据分析结果,可以对机械臂进行优化,以改善其运动性能和工作效率。
7. 结果展示和报告生成在仿真完成后,可以生成仿真结果的图表和报告,用于展示和分析。
机械手臂控制系统的建模与仿真

机械手臂控制系统的建模与仿真随着科技的不断进步,机械手臂在工业生产中扮演着越来越重要的角色。
机械手臂的控制系统可以让它们执行复杂的动作和操作,从而提高生产效率和准确性。
本文将讨论机械手臂控制系统的建模与仿真,以及其在实际应用中的意义。
首先,让我们了解机械手臂的基本构成。
机械手臂通常由几个关节连接而成,每个关节都有一个驱动器,用于控制其运动。
控制系统负责从用户输入的指令中解析出关节的角度,并将其转化为相应的动作。
为了实现精确的控制,控制系统需要对机械手臂进行建模与仿真。
建模是机械手臂控制系统的第一步。
通过建立数学模型,可以描述机械手臂的运动规律和动力学特性。
机械手臂的数学模型通常基于刚体动力学和轨迹规划理论,它可以用方程的形式表示出机械手臂的位置、速度、加速度等信息。
建模的过程需要考虑机械结构的几何参数、驱动器的特性以及外部载荷等因素。
通过建模,我们可以预测机械手臂在不同工况下的动态响应,并进行仿真验证。
仿真是机械手臂控制系统的关键一步。
通过使用计算机软件,可以对机械手臂进行虚拟实验,模拟其运动过程和控制策略。
仿真可以帮助我们验证控制系统的设计是否正确,并找出潜在的问题。
在仿真过程中,可以以不同的工况、负载和输入信号对机械手臂进行测试,评估其性能和鲁棒性。
通过对仿真结果的分析,我们可以优化控制系统的参数和算法,以提高机械手臂的运动精度和控制灵敏度。
机械手臂控制系统的建模与仿真对实际应用具有重要意义。
首先,它可以节省时间和成本。
通过在计算机上进行仿真实验,我们可以在真实的实验之前对控制系统进行优化和研究,避免低效的试错过程。
其次,建模与仿真可以帮助我们设计更可靠的控制系统。
通过评估不同控制策略的性能,我们可以选择最佳的控制算法,并预测机械手臂在不同工况下的响应。
此外,建模与仿真还可以提供可视化的结果,便于工程师理解和分析机械手臂的运动特性。
然而,机械手臂控制系统的建模与仿真也存在一些挑战。
首先,机械手臂是复杂数学和物理系统的集成,因此建模和仿真需要对动力学和控制理论有深入的理解。
全轮转向移动机器人运动学建模及机动性研究

全轮转向移动机器人运动学建模及机动性研究随着科技的不断发展,移动机器人在工业、军事、医疗等领域的应用越来越广泛。
全轮转向移动机器人作为一种灵活且机动性强的机器人,受到了研究者们的广泛关注。
全轮转向移动机器人具备四个独立驱动的轮子,并且每个轮子均可独立转动。
这种机构设计使得机器人可以在水平面上实现前进、后退、平移、旋转等多种运动方式,具备了较强的机动性。
因此,对全轮转向移动机器人的运动学建模及机动性研究显得尤为重要。
首先,对全轮转向移动机器人进行运动学建模。
运动学建模是描述机器人运动的数学模型。
对于全轮转向移动机器人而言,需要考虑每个轮子的转角以及机器人的速度控制。
通过建立适当的数学模型,可以得到机器人的位姿与轮子转动之间的关系。
运动学建模不仅可以帮助我们理解机器人的运动规律,还可以为机器人的路径规划、运动控制等方面提供基础支持。
其次,研究全轮转向移动机器人的机动性。
机动性是指机器人在运动过程中的灵活性和可操作性。
全轮转向移动机器人由于具备独立转动的轮子,因此可以实现更加复杂的运动方式,如平稳的转弯、精准的定位等。
通过研究机器人的机动性,可以优化机器人的运动控制算法,提高机器人的运动能力。
最后,应用全轮转向移动机器人的运动学建模及机动性研究成果。
全轮转向移动机器人的应用领域十分广泛,如工业生产线上的物料搬运、仓库内的货物整理、医院内的病床运送等。
通过研究全轮转向移动机器人的运动学建模及机动性,可以为这些应用场景提供技术支持,实现自动化、智能化的操作。
综上所述,全轮转向移动机器人的运动学建模及机动性研究对于提高机器人的运动能力、优化运动控制算法具有重要意义。
通过深入研究,我们可以更好地理解和应用全轮转向移动机器人,为各个领域的自动化操作提供强有力的支持。
轮式移动机器人动力学建模与运动控制技术

WMR具有结构简单、控制方便、运动灵活、维护容易等优点,但也存在一些局限性,如对环境的适应性、运动稳定性、导航精度等方面的问题。
轮式移动机器人的定义与特点特点定义军事应用用于生产线上的物料运输、仓库管理等,也可用于执行一些危险或者高强度任务,如核辐射环境下的作业。
工业应用医疗应用第一代WMR第二代WMR第三代WMRLagrange方程控制理论牛顿-Euler方程动力学建模的基本原理车轮模型机器人模型控制系统模型030201轮式移动机器人的动力学模型仿真环境模型验证性能评估动力学模型的仿真与分析开环控制开环控制是指没有反馈环节的控制,通过输入控制信号直接驱动机器人运动。
反馈控制理论反馈控制理论是运动控制的基本原理,通过比较期望输出与实际输出之间的误差,调整控制输入以减小误差。
闭环控制闭环控制是指具有反馈环节的控制,通过比较实际输出与期望输出的误差,调整控制输入以减小误差。
运动控制的基本原理PID控制算法模糊控制算法神经网络控制算法轮式移动机器人的运动控制算法1 2 3硬件实现软件实现优化算法运动控制的实现与优化路径规划的基本原理路径规划的基本概念路径规划的分类路径规划的基本步骤轮式移动机器人的路径规划方法基于规则的路径规划方法基于规则的路径规划方法是一种常见的路径规划方法,它根据预先设定的规则来寻找路径。
其中比较常用的有A*算法和Dijkstra算法等。
这些算法都具有较高的效率和可靠性,但是需要预先设定规则,对于复杂的环境适应性较差。
基于学习的路径规划方法基于学习的路径规划方法是一种通过学习来寻找最优路径的方法。
它通过对大量的数据进行学习,从中提取出有用的特征,并利用这些特征来寻找最优的路径。
其中比较常用的有强化学习、深度学习等。
这些算法具有较高的自适应性,但是对于大规模的环境和复杂的环境适应性较差。
基于决策树的路径规划方法基于强化学习的路径规划方法决策算法在轮式移动机器人中的应用03姿态与平衡控制01传感器融合技术02障碍物识别与避障地图构建与定位通过SLAM(同时定位与地图构建)技术构建环境地图,实现精准定位。
机械臂建模方法

机械臂建模方法机械臂(robotic arm)是一种能够模拟人臂的机械装置,广泛应用于工业自动化、医疗手术、航天探索等领域。
在机械臂的建模过程中,主要通过几何建模和运动学建模来描述机械臂的形状和运动特性。
一、几何建模几何建模是机械臂建模的重要环节,它通过描述机械臂的几何形状来实现机械臂的建模。
机械臂的几何形状包括关节长度、连杆长度、关节位置等参数。
在建模过程中,可以根据实际情况进行测量和计算,得到机械臂各个关节的几何参数。
二、运动学建模运动学建模是机械臂建模的关键步骤,它通过描述机械臂的运动特性来实现机械臂的建模。
机械臂的运动特性包括关节角度、末端位置、末端速度等参数。
在建模过程中,可以利用运动学方程和几何关系等方法,推导出机械臂各个关节的运动学模型。
运动学建模主要有两种方法:解析法和数值法。
解析法是通过解析运动学方程,得到机械臂的运动学模型。
数值法是通过数值计算,得到机械臂的运动学模型。
解析法通常适用于简单的机械臂结构,而数值法适用于复杂的机械臂结构。
三、动力学建模动力学建模是机械臂建模的高级步骤,它通过描述机械臂的力学特性来实现机械臂的建模。
机械臂的力学特性包括关节力、末端力矩、惯性参数等参数。
在建模过程中,可以利用牛顿-欧拉方程和拉格朗日方程等方法,推导出机械臂各个关节的动力学模型。
动力学建模主要有两种方法:基于牛顿-欧拉方程的方法和基于拉格朗日方程的方法。
基于牛顿-欧拉方程的方法是通过牛顿定律和欧拉定律,得到机械臂的动力学模型。
基于拉格朗日方程的方法是通过拉格朗日方程,得到机械臂的动力学模型。
这两种方法都可以用于描述机械臂的动力学特性,选择哪种方法主要取决于具体的应用场景和需求。
四、仿真建模仿真建模是机械臂建模的重要手段,它通过模拟机械臂的运动和行为来实现机械臂的建模。
在仿真建模过程中,可以利用计算机软件和数值模拟技术,实现对机械臂的仿真和分析。
通过仿真建模,可以对机械臂的性能进行评估和优化,提高机械臂的工作效率和精度。
轮式移动机器人运动控制的研究的开题报告
轮式移动机器人运动控制的研究的开题报告一、选题背景随着智能制造和物流的快速发展,轮式移动机器人的应用越来越广泛。
在自动化工厂、仓库、医院、学校等场所,轮式移动机器人能够为人们带来极大的便利,提高工作效率和安全性。
而轮式移动机器人的运动控制技术是其实现自主导航、避障、路径规划等功能的核心技术。
目前,常见的轮式移动机器人运动控制方式包括PID控制、模糊控制、神经网络控制等多种方法。
然而,不同的控制方法适用于不同的场合和不同的任务,如何选取合适的控制策略是一个值得研究的问题。
二、选题意义本项目旨在通过对轮式移动机器人运动控制方法的分析与比较,寻找最优控制策略,提高轮式移动机器人的导航精度和运动效率。
同时,研究成果还有助于促进智能制造和物流等领域的发展,推进相关产业的升级。
三、研究内容和方法本项目主要研究内容如下:1. 轮式移动机器人运动学和动力学模型的建立;2. 常见的轮式移动机器人运动控制方法的介绍和分析;3. 对比不同控制方法的优缺点,建立合适的评价指标体系;4. 设计和实现最优控制策略,通过仿真和实验验证其有效性。
研究方法主要包括:1. 理论分析法:对轮式移动机器人的运动学和动力学模型进行分析和建模,结合不同控制方法的理论基础进行比较;2. 实验研究法:通过对轮式移动机器人的实际运动控制,数据采集和分析,验证最优控制策略的有效性;3. 数学模拟法:利用计算机进行轮式移动机器人运动控制仿真,快速评估不同控制方法的优劣和效果。
四、预期成果和实施方案预期成果包括:1. 轮式移动机器人运动学和动力学模型的建立;2. 常见的轮式移动机器人运动控制方法的分类和比较;3. 基于评价指标体系的最优控制策略的设计和实现;4. 仿真和实验验证最优控制策略的有效性。
实施方案:1. 着手进行轮式移动机器人运动学和动力学模型的建立;2. 搜集和整理相关文献资料,对比研究不同的控制方法;3. 设计实验方案并进行实验数据采集和分析;4. 利用计算机进行仿真实验;5. 组织撰写论文,完成研究成果的汇总和整理。
五自由度机械臂运动和控制仿真分析

五自由度机械臂运动和控制仿真分析五自由度机械臂是一种能够在三维空间中进行精确运动和控制的机械设备。
它由五个连接在一起的关节组成,每个关节都可以独立地进行运动,从而实现各种姿态和位置的控制。
在机械臂的运动和控制中,仿真分析起着重要的作用。
通过仿真分析,可以通过计算和模拟来研究机械臂的运动学和动力学特性,以及其控制系统的稳定性和精确性。
首先,我们来讨论机械臂的五个自由度。
这五个自由度分别是基座旋转、第一关节旋转、第二关节旋转、第三关节旋转和末端执行器的平移。
通过控制这五个自由度的运动,机械臂可以实现在三维空间中任意姿态和位置的控制。
在运动学分析中,我们需要计算机械臂的正逆运动学。
正运动学用于根据关节角度计算末端执行器的位置和姿态,而逆运动学则用于根据末端执行器的目标位置和姿态计算关节角度。
通过正逆运动学分析,我们可以确定机械臂关节的运动范围,以及实现特定位置和姿态的方法。
在动力学分析中,我们需要研究机械臂的惯性、力矩和加速度等特性。
这些特性决定了机械臂在运动和受力时的稳定性和精确性。
通过动力学分析,我们可以确定机械臂所需的驱动力矩和控制策略,以实现预定的运动轨迹和姿态。
在控制系统方面,我们需要设计和实现适应机械臂运动和控制的控制算法。
这些算法可以基于传感器反馈信息来调整关节的运动,以实现精确的位置和姿态控制。
通过仿真分析,我们可以评估不同控制算法的性能和稳定性,从而选择最合适的控制策略。
为了进行仿真分析,我们可以使用计算机辅助设计和仿真软件。
这些软件可以提供强大的建模和仿真功能,使我们能够快速而准确地模拟机械臂的运动和控制过程。
通过仿真分析,我们可以预测机械臂在特定任务中的性能和表现,从而指导实际应用中的设计和控制。
综上所述,五自由度机械臂的运动和控制仿真分析是了解和优化机械臂工作性能的关键。
通过正逆运动学、动力学和控制仿真分析,我们可以研究机械臂的运动特性、控制策略和性能指标,从而实现更精确、高效的机械臂应用。
五自由度机械臂运动和控制仿真分析

五自由度机械臂运动和控制仿真分析随着工业自动化的快速发展,机器人技术得到了广泛的应用。
其中,五自由度机械臂作为机器人重要的一种形式,在工业制造、医疗康复、航空航天等领域得到了广泛的应用。
因此,对五自由度机械臂的运动和控制进行仿真分析具有重要的意义。
本文将围绕五自由度机械臂运动和控制仿真分析展开讨论,旨在深入探讨五自由度机械臂的运动学、动力学和控制理论等方面的知识,为实际应用提供指导和参考。
五自由度机械臂是指具有五个自由度的机械臂,它在三维空间中能够实现全方位的运动。
由于五自由度机械臂具有较高的灵活性和适应性,因此被广泛应用于各种领域。
例如,在工业制造领域,五自由度机械臂可以用于物体的抓取、搬运、装配等任务;在医疗康复领域,五自由度机械臂可以辅助病人进行肢体康复训练;在航空航天领域,五自由度机械臂可以用于空间物体的操作和维修。
五自由度机械臂的运动学分析主要是研究机械臂末端执行器在空间中的位置和姿态的变化规律。
通过对运动学方程的建立和求解,可以得出机械臂末端执行器的位置和姿态与各关节变量的关系,为机械臂的运动控制提供基础。
五自由度机械臂的动力学分析也是非常重要的,它主要是研究机械臂在运动过程中受到的力和扭矩的变化规律。
通过动力学方程的建立和求解,可以得出机械臂在运动过程中所需要的力和扭矩,为机械臂的运动控制提供依据。
为了对五自由度机械臂的运动和控制进行仿真分析,常用的仿真软件包括Adams、Simulink、Unity等。
利用这些仿真软件,可以建立五自由度机械臂的模型,并进行运动学、动力学和控制等方面的仿真。
通过仿真分析,可以得出机械臂的运动轨迹、速度、加速度等运动特性,以及机械臂在运动过程中所受到的力和扭矩等动力学特性。
同时,还可以对机械臂的控制算法进行验证和优化,为实际应用提供指导和支持。
根据仿真结果,可以得出五自由度机械臂运动和控制的一些特点。
例如,在运动学方面,五自由度机械臂具有较高的灵活性和适应性,可以实现在三维空间中的全方位运动。
轮式移动机器人结构设计论文
轮式移动机器人的结构设计学生姓名:张华班级:078105131指导老师:许瑛摘要:随着机器人技术在外星探索、野外考察、军事、安全等全新的领域得到日益广泛的采用,机器人技术由室内走向室外,由固定、人工的环境走向移动、非人工的环境。
本课题是机器人设计的基本环节,能够为后续关于机器人的研究提供有价值的平台参考和有用的思路。
本文介绍了已有的机器人移动平台的发展现状和趋势,分析操作手臂常用的结构和工作原理,根据选定的方案对带有机械臂的全方位移动机器人进行本体设计,包括全方位车轮旋转机构的设计、车轮转向机构的设计和机器人操作臂的设计。
要求全方位移动机构转向、移动灵活,可以快速、有效的到达指定地点;机械臂操作范围广、运动灵活、结构简单紧凑且尺寸小,可以快速、准确的完成指定工作。
设计完成后要分析全方位移动机构的性能,为后续的研究提供可靠的参考和依据。
关键字:机器人移动平台操作臂简单快速准确指导老师签名:Structure design of wheeled mobile robotsStudent name: Zhang hua Class: 0781051Supervisor: Xu yingAbstract:with the robot technology in an alien exploration, field survey, military and security new areas to be increasingly widely adopted, robot technology by indoor, outdoor by fixed, to move towards artificial environment, the artificial environment. This topic is the basic link, robot design for the follow-up about robots can provide valuable reference and useful ideas platform.This article summarizes the existing robot mobile platform development status and trends of operating the arm structure and principle of common, According to the selected scheme of mechanical arm with ontology omni-directional mobile robots designed, including the design of all-round wheel rotating mechanism, wheel steering mechanism of design and the design of robot manipulator. Request to change direction, move the omni-directional mobile institution, can quickly and effectively flexible the reaches the specified location; Mechanical arm operation scope, sports flexible, simple and compact structure and size is small, can quickly and accurately completed tasks. The design is completed to analyze the performance of the omni-directional mobile institutions for subsequent research, provide reliable reference and basis.Keywords: Robot mobile platform manipulator simple accurate and quickSignature of Supervisor:本文由闰土服务机械外文文献翻译成品淘宝店整理目录1.绪论1.1引言 (1)1.2国内外相关领域的研究现状 (1)1.3主要研究内容 (5)2.全向移动机器人移动结构设计2.1引言 (5)2.2机械设计的基本要求 (6)2.3全方位轮式移动机构的设计 (6)2.3.1移动机器人车轮旋转机构设计 (7)2.3.2移动机器人转向机构设计 (10)2.3.3电机的选型与计算 (12)2.4移动机器人车体机构设计 (15)2.5本章小结 (16)3.机械手臂的设计3.1末端执行器的设计 (16)3.1.1末端执行器的设计要求 (17)3.1.2末端执行器的设计 (17)3.1.3电机的选型与计算 (20)3.2机械手臂杆件的设计 (21)3.2.1腕部结构设计 (21)3.2.2臂部结构设计 (21)3.2.3机械臂电机的选型与计算 (23)3.3本章小结 (23)4.机械材料的选择和零件的校核4.1机械材料的选用原则 (24)4.2零件材料选择和强度校核 (25)4.3本章小结 (29)参考文献 (30)致谢 (31)附录1 绪论1.1 引言移动机器人已经成为机器人研究领域的一个重要分支。
《2024年新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的不断发展,机器人技术已经成为现代工业、军事、医疗等多个领域的重要应用。
其中,移动机器人技术更是机器人领域的重要研究方向。
传统轮式和腿式机器人各有优缺点,为了充分发挥两者的优势,本文提出了一种新型轮腿式机器人的设计与仿真。
该机器人具有轮式和腿式的双重特性,能够适应不同的地形环境,提高移动性能和作业效率。
二、新型轮腿式机器人的设计1. 结构设计新型轮腿式机器人采用模块化设计,主要包括底盘、轮腿模块、驱动系统等部分。
底盘采用轻量化材料制作,减轻了整体重量。
轮腿模块包括轮式和腿式两种形态,可以根据需要进行切换。
驱动系统采用电机驱动,实现了对机器人的精确控制。
2. 运动机制设计新型轮腿式机器人采用轮腿混合运动机制,在平坦地面上采用轮式运动,提高了移动速度和稳定性;在复杂地形环境下采用腿式运动,提高了机器人的越障能力和适应能力。
此外,机器人还具备一定程度的自主导航和避障能力,能够根据环境变化自动调整运动策略。
三、仿真实验与分析为了验证新型轮腿式机器人的性能,我们进行了仿真实验。
仿真实验主要包括运动学仿真和动力学仿真两部分。
1. 运动学仿真运动学仿真主要验证了机器人的运动性能。
我们在仿真环境中设置了不同的地形场景,包括平坦路面、坡道、障碍物等。
通过仿真实验,我们发现新型轮腿式机器人在各种地形环境下均能实现稳定的运动,且越障能力较强。
此外,我们还对机器人的运动速度、加速度等性能指标进行了分析,发现机器人具有较好的运动性能。
2. 动力学仿真动力学仿真主要验证了机器人的驱动力和耗能情况。
我们通过仿真实验测得了机器人在不同负载、不同地形条件下的驱动力和耗能情况。
实验结果表明,新型轮腿式机器人在轻负载条件下具有较低的能耗,且在复杂地形环境下仍能保持较高的驱动力。
此外,我们还对机器人的散热性能进行了分析,发现机器人的散热系统能够有效地降低工作温度,保证机器人的稳定运行。
搬运机械手仿真设计和制作
搬运机械手仿真设计和制作随着工业自动化的不断发展,搬运机械手作为一种重要的自动化设备,在工业生产中发挥着越来越重要的作用。
本文主要探讨搬运机械手的仿真设计与制作过程,以期为相关领域的研究和应用提供有益的参考。
需要根据实际应用需求确定机械结构方案。
搬运机械手需要实现哪些动作?需要抓取和搬运哪些类型的物品?针对这些问题,我们需要展开一系列的分析和研究。
在此基础上,设计出满足要求的基本结构方案,包括机械臂、抓手、驱动系统等主要部件。
为了对搬运机械手进行精确的控制,需要建立其数学模型。
数学模型能够描述机械手的运动规律,以及各部件之间的相互关系。
常用的数学模型包括运动学模型和动力学模型。
其中,运动学模型主要描述机械手的位姿和运动轨迹,动力学模型则描述机械手在运动过程中的力和速度等物理量之间的关系。
仿真程序设计是搬运机械手仿真设计的重要环节。
在这一阶段,需要选择合适的仿真软件,如Adams、Simulink等,并根据之前建立的数学模型编写仿真程序。
仿真程序需要能够模拟机械手的实际运行情况,对各种工况进行仿真测试,以验证设计的有效性和可靠性。
在仿真程序设计完成后,需要制作物理样机以验证设计效果。
根据设计方案制作机械零件,并进行组装、调试和测试。
在此过程中,需要对机械手进行不断的优化和改进,使其在抓取、搬运等操作中具有更好的稳定性和效率。
当物理样机达到预期效果后,可以进入批量生产和实际应用阶段。
搬运机械手作为一种重要的自动化设备,在工业生产中具有广泛的应用前景。
本文主要探讨了搬运机械手的仿真设计与制作过程,包括确定机械结构方案、建立数学模型、仿真程序设计、物理样机制作等方面。
通过这些环节的不断优化和改进,我们可以实现更高效、更稳定的搬运机械手设计和制作。
随着科技的不断进步,搬运机械手的应用领域越来越广泛,例如在物流、制造业、农业等领域都有应用。
未来,我们需要进一步研究和改进搬运机械手的设计和制作技术,提高其智能化、自主化和适应性等方面的性能,以更好地满足实际应用的需求。
机械臂控制系统仿真实验设计
机械臂控制系统仿真实验设计赵海滨;于清文;刘冲;陆志国;颜世玉【摘要】利用Matlab/Simulink软件设计机械臂控制系统仿真实验,包括机械臂模型、轨迹规划、逆动力学控制和运动学.以两自由度机械臂为研究对象,根据动力学方程建立机械臂模型.采用5阶多项式进行轨迹规划,并采用逆动力学进行机械臂的控制.通过运动学获取各个关节的位置坐标,动态的显示机械臂的运动过程.该仿真实验能够加深学生对机器人动力学、运动学和控制等理论的理解,有利于培养学生的实际编程能力,激发学生的学习热情.【期刊名称】《实验室研究与探索》【年(卷),期】2018(037)011【总页数】5页(P100-104)【关键词】机械臂;轨迹规划;逆动力学控制;运动学;Matlab仿真【作者】赵海滨;于清文;刘冲;陆志国;颜世玉【作者单位】东北大学机械工程与自动化学院,沈阳110819;东北大学机械工程与自动化学院,沈阳110819;东北大学机械工程与自动化学院,沈阳110819;东北大学机械工程与自动化学院,沈阳110819;东北大学机械工程与自动化学院,沈阳110819【正文语种】中文【中图分类】TP2420 引言机器人是一门跨专业,高度综合的新兴学科[1],无论在基础理论方面还是在实践应用方面发展速度都非常快。
越来越多的高等学校面向高年级本科生和低年级研究生开设机器人学等机器人领域的相关课程,并对课程的改革进行了研究[2-4]。
机器人课程的教学包括理论教学和实验教学[5-7]。
由于资金和设备等原因,各个高校往往以理论教学为主,对实验教学不够重视。
在机器人课程的理论教学中存在大量的公式推导和微分方程等,对于学生比较抽象、复杂和难以理解。
因此,采用Matlab/Simulink软件进行机器人的仿真和控制实验非常必要。
在机器人的教材中,机器人动力学部分的公式推导均以两自由度机械臂为例,本文也以两自由度机械臂为研究对象。
根据机械臂的动力学方程,采用Matlab/Simulink软件建立机械臂仿真模型,采用五阶多项式进行轨迹规划,并采用逆动力学进行机械臂的控制。
多自由度机械臂的设计以及运动仿真
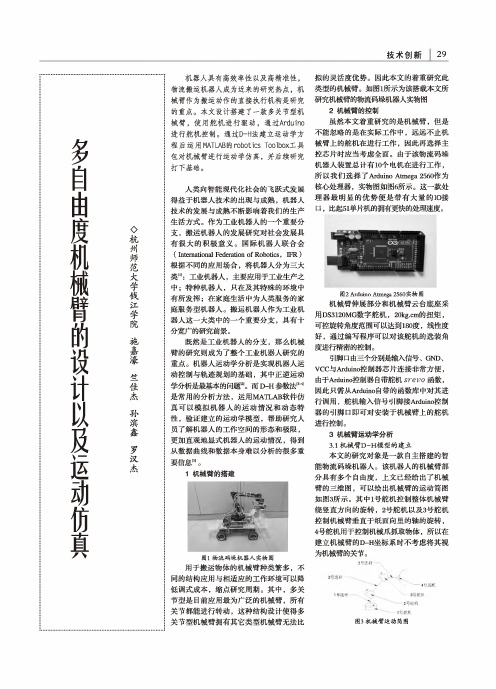
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
轮腿式移动机器人运动学分析与仿真
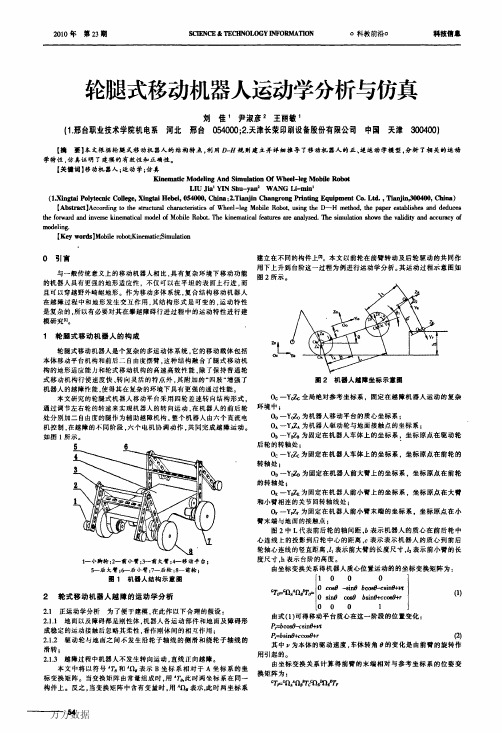
科技信息0科教前沿02010年第23期000c∞(“巩+蚴-sin(O+Ol+蚴如∞(肌口I+蚴+fleos(O+Oi)+LcosO+以sin(O+Ol+80cos(O+Ol+母0拓in(口+pI删+llsin(O+01)+LsinO+rOO1由于在此过程中前臂末端与参考坐标系在z方向上相对速度为零.所以町得Prz=12(oJ+Ol+的sin(“岛+∞+f1∞+矾)sin(O+01)+/xosin0=0(4)若台阶高度车体速度和转角0,,巩的变化规律已知,则可以由式(4)得到车体转角0的运动规律,进而由式(3)推导出质心位置在这一阶段的运动规律。
2.2逆运动学分析轮腿式移动机器人在越障过程中可以通过调节其相应的运动可控馈,对心以一定的越障行为翻越障碍。
为了实现机器人平稳越障。
减轻震动,保证移动载体的稳定性,就要求在越障过程中,机器人要通过控制其可变的结构保持机体重心以低缓的方式平稳上升以越过障碍。
机器人通过安装在其机体上的外部传感器可以感知地形障碍的特征及大致参数。
当获知运动前方待翻越的地形障碍特征要素后,便可以规划相应平缓的机器人重心越障轨迹。
为了控制机器人以一定的位姿跟踪该莺心连续轨迹,需要根据此条件下所要求的车体质心的速度和方位来确定驱动轮的转速,以使得机器人顺利平稳的翻越障碍。
为此进行相应控制变鼍的逆向求解。
设机器人移动平台质心的佗置和方位角为(R只,0)T,速度为(%%铆7;后轮中心坐标系B的速度为(y两'I,。
∥)7,根据刚体运动原理,有…一『y毋1一『b1V=y—xePo=ly匠l+to×Ic(5)【埘J【0J由式(5)可得驱动轮的速度:[cosO-sinO0]『L—幽1『oo颤y—J6)-sinO(V:-∽)]G萨IsinOcosO0K—雠l=lsino(P厂讪)+co咧PI_戗)l(6)【001儿∞J【∞J由于驱动轮做纯滚动,则驱动轮转速为:ta口=cosO(Vf-tob)-sinO(V:..cac).∽由于在越障过程中前臂和地形发生作用时.前臂的末端与地形障碍保持接触的运动约束限制,此时前臂与地面的接触点在其自身坐标系的z方向上相对参考坐标系的速度为零.则有转角速度都是未知的,同时限于篇幅,所以仅以晚做匀速运动,求0。
三维空间机械臂的动力学建模与仿真分析
三维空间机械臂的动力学建模与仿真分析吴良凯,王涛,王春丽,王洲,夏国辉(山东科技大学机械电子工程学院,山东青岛266590)摘要:为了提高三维空间助力机械臂的设计效率,运用拉格朗曰方法建立机械臂的动力学模型,利用Sold /V o k 建立三维空间助力机械臂的构件模型,将装配后三维实体模型导入ADAMS 中进行动力学仿真分析,得到相关性能曲线图,为空间 助力机械臂的结构设计和最优控制提供依据。
关键词:机械臂;动力学;ADAM S 拉格朗日法中图分类号:"P 241N /441 文献标志码:A文章编号:1〇〇2-2333(2〇17)〇1-〇〇15-〇3Dynamics Modeling and Simulation Analysis of Three-dimensional Space ManipulatorWU Liangkai , WANG Tao , WANG Chunli , WANG Zhou , XIAGuohui(College of Mechanical and Electronic Engineering , Shandong University of Science and Technology , Qingdao 266590, China )Abstract : In order to improve the design efficiency of three-dimensional space manipulator, the dynamic modeling of themanipulator is established by using Lagrange method, the three-dimensional solid component model of space manipulator is built by Solidworks, the three -dimensional solid model after assembled is imported into ADAMS to carry out the dynamic simulation analysis. Related performance curve is obtained to provide reference for the mechanical structure design and the optimal control of the space manipulator.Key words : manipulators; dynamics; ADAMS; Lagrange 0引言三维空间助力机械臂是一个复杂的动力学系统,它 由多个关节和多个运动构件组成,各关节与运动构件之 间存在复杂的耦合关系™。
《新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的飞速发展,机器人技术已经广泛应用于各个领域。
其中,移动机器人是机器人技术的重要组成部分。
为了提高机器人的适应性和灵活性,本文提出了一种新型轮腿式机器人设计。
该设计旨在结合轮式和腿式移动方式的优点,使机器人能够在各种复杂环境中灵活移动。
本文将详细介绍该新型轮腿式机器人的设计思路、设计方法以及仿真结果。
二、新型轮腿式机器人的设计思路1. 设计需求分析在设计新型轮腿式机器人时,我们首先分析了机器人的应用场景和功能需求。
考虑到机器人需要在复杂环境中灵活移动,我们确定了以下设计需求:高灵活性、高适应性、高负载能力以及低能耗。
2. 结合轮式与腿式移动方式的优点为了满足上述设计需求,我们提出了将轮式和腿式移动方式相结合的设计思路。
轮式移动方式具有速度快、能耗低的优点,而腿式移动方式则具有高适应性和高负载能力的特点。
因此,我们将轮式和腿式移动方式的优势相结合,设计出一种新型轮腿式机器人。
三、新型轮腿式机器人的设计方法1. 机械结构设计机械结构设计是新型轮腿式机器人设计的关键步骤。
我们采用了模块化设计思想,将机器人分为轮式模块和腿式模块。
轮式模块采用传统轮式结构,以实现快速移动;腿式模块则采用多关节结构,以实现高适应性和高负载能力。
此外,我们还设计了可切换的轮腿转换机构,使机器人能够在轮式和腿式之间灵活切换。
2. 控制系统设计控制系统是新型轮腿式机器人的大脑。
我们采用了先进的传感器技术和控制算法,实现了对机器人的精确控制。
同时,我们还设计了能量管理系统,以实现低能耗运行。
四、仿真实验与分析为了验证新型轮腿式机器人的设计效果,我们进行了仿真实验。
仿真实验结果表明,该机器人在各种复杂环境中均能实现灵活移动,且具有高灵活性、高适应性、高负载能力和低能耗等优点。
具体分析如下:1. 灵活性分析在仿真实验中,我们发现新型轮腿式机器人在面对复杂地形时表现出色。
在崎岖不平的地形中,机器人能够通过切换为腿式模式,实现灵活的移动。
轮式移动仿人机器人的动力学建模与分析

2 D-H 坐标系的建立 考虑到颈部和腕部关节的惯量相对较小, 为简
化起见, 忽略颈部两个自由度及两臂腕部各三个自 由度, 使动力学分析中机器人的自由度数由原来的 21个减少到 13个。建模中做如下假设:
( 1) 轮只以滚动方式移动而没有滑动, 即满足 完整约束条件。
( 2) 忽略来自地面的滚动摩擦。 ( 3) 所有连杆都是刚性的, 忽略各种柔性环节。 ( 4) 忽略各关节处的阻尼系数。 依据 D-H 方法建立的坐标系如图 3所示。系统有 13个连杆, 14个坐标系。机器人的初始姿态为面部朝向 纸外, 双臂下垂。图中, xiyi zi 表示第 i 个坐标系, qi表示 第 i个关节。该机器人的 D-H 参数如表 1所示。
本文利用 RNEA 算法 完成了该轮式 仿人机器 人车体、躯干及双臂的整体动力学建模, 虽然模型的 维数较高, 但不需要对模块之间的交互作用力进行 建模, 并且由于机器人的双臂结构对称, 当双臂运动 协调规划时, 反向方程中由双臂递推到腰部上的部 分力矩将被抵消, 使动力学模型得到部分简化。
1 轮式仿人机器人的机械结构特点 本轮式移动仿人机器人 ( 如图 1所示 ) 由轮式
iR i- 1 ( i- 1R 0 i- 1 )
0
a8
9(左臂肘折 )
0
a9
11(右臂肩摆 ) 0
0
12(右臂肩转 ) d7
0
13(右臂肩折 ) 0
a8
14(右臂肘折 ) 0
a9
/2 - /2
/2 - /2 - /2
/2 /2 0 0 - /2 /2 0 0
- /2 - /2 q3 ( 0) q4 ( /2) q5 ( - /2) q6 ( /2) q7 ( /2) q8 ( ) q9 ( 0) q11 ( /2) q12 ( /2) q13 ( ) q14 ( 0)