MATLAB/Simulink下实现实时一些方法总结
MATLAB-SIMULINK讲解完整版
第3章 SIMULINK应用基础
(1) 文件管理类:包括 4 个按键,分别是按键 、按键 和按键 。
(2) 对象管理类:包括 3 个按键,分别是按键 和按键 。
、按键 、按键
(3) 命令管理类:包括 2 个按键,分别是按键 和按键 。
(4) 仿真控制类:包括 6 个按键、1 个文本框、1 个列表
框,分别是按键 、按键 如图3-6所示,在模型中加入注释文字,使模型更具可 读性。
图3-6 添加注释文字示例 (a) 未加注释文字;(b) 加入注释文字
第3章 SIMULINK应用基础
3.2.3 子系统的建立与封装 1. 子系统的建立 一般而言,电力系统仿真模型都比较复杂,规模很大,
包含了数量可观的各种模块。如果这些模块都直接显示在 SIMULINK仿真平台窗口中,将显得拥挤、杂乱,不利于用 户建模和分析。可以把实现同一种功能或几种功能的多个模 块组合成一个子系统,从而简化模型,其效果如同其它高级 语言中的子程序和函数功能。
、列 表框
、按键 、按键 和按键 。 (5) 窗口切换类:包括 6 个按键,分别是按键 、按键 、按键 、按键 和按键 。
、按键
工具栏中各个工具图标及其功能说明见附录 B。
第3章 SIMULINK应用基础
3.2 SIMULINK的基本操作
3.2.1 模块及信号线的基本操作 1. 模块的基本操作 模块是系统模型中最基本的元素,不同模块代表了不同
增强模型的可读性
签内容,在标签编辑框外的窗口中单击鼠标退出
第3章 SIMULINK应用基础
3.2.2 系统模型的基本操作 除了熟悉模块和信号线的基本操作方法,用户还需熟悉
SIMULINK系统模型本身的基本操作,包括模型文件的创建、 打开、保存以及模型的注释等。
利用Matlab进行模拟和实时系统仿真的指南
利用Matlab进行模拟和实时系统仿真的指南引言Matlab是一种强大的数学计算和仿真软件,广泛应用于科学研究、工程设计、数据分析等领域。
本文将为大家介绍如何使用Matlab进行模拟和实时系统仿真,帮助读者快速上手并取得良好的仿真效果。
一、Matlab的基本介绍1. Matlab的特点和优势Matlab具有易学易用、功能强大、成熟稳定的特点,可以进行高效的数值计算、绘图和数据处理。
通过Matlab,用户可以快速实现各类算法和模型,并进行可视化演示。
2. Matlab的基本操作和界面介绍Matlab的界面分为命令窗口、编辑器窗口、变量窗口和绘图窗口等区域,用户可以在不同窗口之间切换,并通过命令行输入相关指令进行计算和操作。
Matlab的操作类似于一种交互式的编程语言,用户可以通过函数和脚本来实现相应的功能。
二、Matlab的模拟仿真工具1. Matlab的Simulink工具Simulink是Matlab中的一个重要模块,用于图形化建模和仿真系统。
通过Simulink,用户可以使用图形化界面拖拽各类模块,建立复杂的系统模型,并进行仿真分析。
2. Simulink的使用方法用户可以通过拖拽不同的模块进行系统的建模,如信号源、控制器、传感器等,并通过参数设置实现相应功能。
Simulink还提供了丰富的仿真工具,例如时域仿真、频域分析等,帮助用户更好地理解系统性能。
三、Matlab的实时仿真工具1. Matlab的Real-Time Workshop工具Real-Time Workshop是Matlab中用于生成实时代码的工具,这使得用户可以将建立的仿真模型直接部署到硬件平台上进行实时控制。
2. Real-Time Workshop的使用方法用户可以通过将Simulink中的模型进行编译和配置,生成适用于不同硬件平台的实时代码。
通过这种方式,用户可以在硬件平台上实现实时控制,进行闭环仿真等应用。
四、案例分析1. 汽车倒车雷达系统仿真以汽车倒车雷达系统为例,介绍如何使用Matlab进行仿真。
如何使用Matlab技术进行实时数据处理
如何使用Matlab技术进行实时数据处理一、引言数据处理是当今科学和工程领域中的重要任务之一。
对于大规模数据集和实时数据流的处理,特别是在数据驱动的决策和系统控制中,数据处理的需求变得越来越迫切。
而Matlab作为一款功能强大的科学计算软件,提供了丰富的工具和函数,能够有效地处理和分析数据,并且具备实时数据处理的能力。
本文将以实例的方式介绍如何使用Matlab技术进行实时数据处理。
二、Matlab中的实时数据处理工具Matlab提供了多种实时数据处理工具和函数,其中最常用的是Simulink和Data Acquisition Toolbox。
Simulink是一种基于图形化建模和仿真的工具,可以用于建立实时数据处理模型。
Data Acquisition Toolbox则提供了数据采集和记录的功能,可以实时获取和分析传感器数据。
三、实例:实时心率检测系统为了更好地展示Matlab在实时数据处理方面的能力,我们以实时心率检测系统为例进行讲解。
该系统通过采集心电信号并实时计算心率值,可以实时监测患者的心脏健康状况。
1. 数据采集首先,我们需要连接心电仪,并配置Data Acquisition Toolbox以获取心电信号数据。
可以使用Matlab提供的函数调用硬件设备,并设置采样频率和数据精度等参数。
2. 数据预处理心电信号通常存在噪声和干扰,需要进行预处理来提取有效的心电特征。
可以使用Matlab中的数字滤波器函数对信号进行滤波和去噪,去除高频和低频成分,以及去除噪声和干扰。
3. 心率计算心率是根据心电信号的周期性来计算的。
通过使用Matlab中的傅里叶变换函数将信号转换到频域,可以得到心率对应的频率成分。
然后根据频率峰值的位置和间隔,可以计算出心率的值。
4. 结果显示和报警最后,使用Matlab的图形化界面功能,可以实时显示心率值,并设置报警系统,当心率超过某个阈值时,发出报警信号。
四、实时数据处理的挑战与应对在实时数据处理过程中,会面临一些挑战,如处理速度、数据丢失和算法复杂度等。
Matlab下实现的实时数据采集和处理_李成功
Matlab下实现的实时数据采集和处理 Real Time Data G atherin g&Processing Realized U nder Th e Environmen t of Matlab 李成功 赵 昱 北京航空航天大学【摘要】实时数据采集与处理是风机状态监测与故障诊断系统的一个关键问题,介绍了在MATLAB 环境下利用Real_Time Wo rkshop实现实时数据采集与处理的一种方法。
关键词:风机 故障诊断 监测A bstract:Real time data gathering&processing is the key problem of fan conditio n monitoring& trouble diagnosis sy stem.The method of real time data gathering&processing realized by real time w orkshop under the environment of MATLAB is introduced.Key words:Fan Trouble diagnosis Monitor一、引言设备状态的实时监测对于风机的故障诊断以及保证机组的安全可靠运行具有重要的意义。
只有进行实时采集、记录机组运行状态的各种数据,才能及时发现异常情况,快速、准确地诊断出故障产生的原因,提出对策。
这些都是通过对采集到的数据进行加工处理来实现的。
而如何实现对数据的实时采集是其中一个关键问题。
过去实时数据采集系统一般是在DOS操作系统下应用汇编语言开发或者用C语言开发,目前多采用C语言开发。
因为其效率较高、可读性较强、实时性较好。
但是其在数值分析和算法工具方面的效率却远远低于Matlab语言。
在准确方便地绘制数据图形方面,M atlab语言更具有无可比拟的优势。
此外,M atlab还可提供功能强大的工具箱。
MATLAB7.0使用详解-第10章 SIMULINK高级仿真技术
10.3.1
使能子系统(Enable Subsystem)
• 使能子系统(Enable Subsystem)将控制信号分 为允许(enable)和禁止(disenable)两种。当 控制信号为正时,即控制信号为允许状态,系统 可以执行使能子系统中的模块;否则就禁止模块 功能。
10.3.2 触发子系统(Triggered Subsystem)
10.2 子系统的封装
• 使用子系统技术可以很好的优化系统模型得界面,是系统 模型的可读性更强。在对系统进行仿真时,首先要对系统 模块参数进行设置,对子系统也是如此,需要对子系统所 有模块进行合适的参数设置。 • 在第8章的例子中,子系统中模块的参数是逐一设置的,这 会给用户带来极大的不便。子系统的封装技术则是对子系 统的包装,使其成为一个真正意义上的SIMULINK模块,通 过封装,可以简化模型,用户使用一个动态设置的对话框 代替多个静态对话框,省去了对子系统内部结构的了解, 为用户的直接调用提供了方便。 • 一个已经创建的子系统的封装方法主要是通过使用下图所 示的封装编辑器来实现的,在封装编辑器中用户可以设置 封装参数设置、图标、初始以及文本。归纳起来,即设定 子系统初始值及特性、生成模块图标以及创建模块帮助文 档和描述信息。
10.4 SIMULINK的模型调试
• 如同诸多系统设置平台一样,SIMULINK也具有界 面友好、功能强大的调试功能。SIMULINK提供了 一个图形化的调试界面,简化了调试操作。 simulink调试器是一个定位和诊断模型错误的工 具.通过SIMULINK调试工具,用户可以采用多种 方式对模型进行调试,发现其中可能存在的问题 并加以修改,从而使得用户的模型设计、仿真、 分析更加快速、便捷。
ቤተ መጻሕፍቲ ባይዱ
matlab中simulink使用技巧

参加数学建模已经很多年了,算来其中所学多源于网络上各位前辈的无私奉献。
饮水当思源,承志以后继。
故而添加此分类,用于交流我这些年的心得。
心得分为软件和算法两类,软件可能会包括m atlab/simulin k,maple,mathema ti ca,spss(被收购成了pa sw),ansys,ansoft/maxwell,comsol,p scad,tc,算法可能有GA,NNs。
当然,受到专业研究所限,很多时候无法得心应手,献丑于此,只为提醒自己要做到更好。
恰巧,我在自己学校的b bs上申请了相关版面的版主职位,也希望自己能整理出些基础教学,以备后生晚辈们入门。
暂时的想法是,先说些simu link的相关知识,因为工科学生最常用的就是这个仿真环境,而其他软件又恰好对他保留了接口,可以说这个软件成为了算法的中心。
以后将陆续说些si muli nk不能完成的任务,并推荐能完成这些任务的工具。
开始吧——simulin k可以视作m a tlab下的工具库,matlab版本不断更新,si mulin k也不断更新,当前版本为ma tlab2011b。
首先要明确,simulin k的作用为求解常微分方程(组)!且这是他唯一的作用!也就是说偏微分方程在sim ulink中是无法求解的,需要其他工具或软件作为接口,或者你够牛的,就直接写个有限元的程序。
当然,常微分方程是不够的,为适应数字控制电路等离散系统,simulin k可以求解离散的常微分方程,也就是差分方程,略微麻烦,不做重点介绍。
然后来看看si mulink求解常微分方程(组)的方法,首先要把方程写成如下形式:y1'=f1(y1,y2,...yn,t)y2'=f2(y1,y2...yn,t)...yn'=fn(y1,y2...yn,t)至于如何写成这种形式,就是降阶了,线性代数里说的很多了,比如y1=y;y2=y1'=y';y3=y2'=y''...需要注意的是,等号右侧不能有导数项,如果等号右边出现了导数项,则说明这个方程需要积分一次。
matlab中-simulink的应用
2023年11月13日
5
Simulink具有以下特点: • 基于矩阵的数值计算; •高级编程语言; •图形与可视化; •工具箱提供面向具体应用领域的功能; •丰富的数据I/O工具; •提供与其它高级语言的接口; •支持多平台(PC/Macintosh/UNIX); •开放与可扩展的体系结构。
2023年11月13日
(3)模块的移动
(4)模块的删除
(5)改变模块的大小
(a)原尺寸
( b)拖动边框
(c)新尺寸
2023年11月13日
15
(6)模块的旋转 (a)缺省状态 (b)旋转1800
返回 (c)旋转900
(7)模块名的操作 也可修改模块名的字体:用Format:Font
2023年11月13日
16
连线的操作
产生连线 水平或垂直连线 斜连线 连线的删除
从命令窗口运行仿真的函数有4个,即sim、 simset、simget和set_param。
1. sim函数 sim函数的作用是运行一个由Simulink建立的
模型,其调用格式为: [2t02,3年x1,1月y13日]=sim(modname,timespan,options,data2)7
2. simset函数
2.交互式的仿真环境
Simulink框图提供了交互式很强的仿真环境,既可以 通过下拉菜单执行,也可以通过命令行进行仿真。
3.专用模块库(Blocksets)
MathWorks公司开发了一系列的专用功能块程序包, 通过这些可迅速地对系统实现建模、仿真和分析。
2023年11月13日
3
Simulink部分软件工具包
(3)存盘:Simlink是以ASCII码形式存储的.mdl文件
如何使用Matlab进行实时数据处理

如何使用Matlab进行实时数据处理介绍:数据处理是现代科学与工程领域中非常重要的一个环节。
在很多实时应用中,如金融交易、天气预报等,对实时数据进行及时、准确的处理是至关重要的。
Matlab作为一种功能强大的数据处理工具,在实时数据处理方面具有广泛的适用性。
本文将介绍如何使用Matlab进行实时数据处理,包括实时数据的获取、处理和展示。
一、实时数据获取在实时数据处理中,首先需要获取实时数据。
Matlab提供了多种获取实时数据的方式:1. 串口通信:通过串口通信,可以与外部硬件设备进行数据的交互。
Matlab提供了Serial对象,可以很方便地进行串口通信。
通过Serial对象,可以设置串口通信的参数,如波特率、数据位数等,并使用read函数读取串口数据。
2. 网络通信:通过网络通信,可以获取远程设备或者服务器上的实时数据。
Matlab提供了TCPIP对象,可以进行网络通信。
通过TCPIP对象,可以建立与远程设备或者服务器的连接,并使用read函数读取网络数据。
3. 数据采集卡:通过数据采集卡,可以获取来自传感器或者其他外部设备的实时数据。
Matlab提供了DataAcquisition对象,可以进行数据采集。
通过DataAcquisition对象,可以设置采样率、采样精度等参数,并使用start和stop函数控制数据采集的开始和停止。
二、实时数据处理获取到实时数据后,下一步就是对数据进行处理。
Matlab提供了丰富的数据处理函数和工具箱,可以满足不同应用场景下的需求。
以下是一些常用的实时数据处理方法:1. 数据滤波:实时数据可能受到噪声的影响,需要进行滤波处理以提取有效信息。
Matlab提供了多种滤波函数,如低通滤波、高通滤波和带通滤波等。
可以根据实际需求选择适当的滤波函数,并使用filter函数对实时数据进行滤波。
2. 数据去噪:实时数据中可能存在异常值或者孤立点,需要进行去噪处理以减少误差。
Simulink一些知识总结
一、set_param 函数的应用(一)函数调用格式:set_param(object,param,value),其中object为模块句柄,param 为参数,value 为参数值。
(二)举例(1)启动模型仿真set_param(gcs,'SimulationCommand','start')(2)精确控制模型仿真步长set_param(gcs, 'SimulationCommand', 'step'),step 为仿真步长数。
(3)设置模块在模型中的位置set_param('mymodel/Gain','Position',[50 250 125 275])(4)设置模块的回调函数set_param('mymodel/Gain','OpenFcn','my_open_cb')(5)设置模块的朝向set_param('mymodel/Gain','Orientation','left')二、实时改变模块的参数单步仿真一次,改变一次参数的值,代码如下:set_param(gcs,'SimulationCommand','start')while 1set_param(gcs,'SimulationCommand','pause')set_param(你的模块名,'Resistance', 你想改变的值); %这一句你替换一下参数即可set_param(gcs,'SimulationCommand','step')end三、上次末状态作为本次初始状态进行仿真问:已经建立好一个数据仿真模型现在想单独改变一个参数去观察参数扰动对结果的影响,例如参数变化范围是1000 到1500,每7s 的时间让参数变化100,用什么方法可以实现?答:分次仿真,每次仿真保存末状态,下一次仿真前更改参数,再倒入上次仿真的末状态作为初始状态,设置如下图:四、模型加上标题问:怎么给模型加上标题?答:双击模型空白位置,即可输入text 文本,并可以设置字体大小颜色等。
(13)Matlabsimulink使用篇
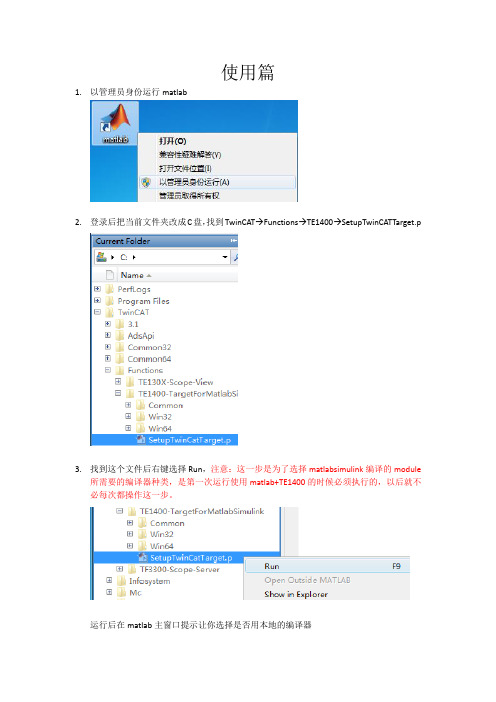
使用篇1.以管理员身份运行matlab2.登录后把当前文件夹改成C盘,找到TwinCAT→Functions→TE1400→SetupTwinCATTarget.p3.找到这个文件后右键选择Run,注意:这一步是为了选择matlabsimulink编译的module所需要的编译器种类,是第一次运行使用matlab+TE1400的时候必须执行的,以后就不必每次都操作这一步。
运行后在matlab主窗口提示让你选择是否用本地的编译器因为本地有VS2010的编译器,所以选择y后敲回车随后matlab找到本地有两种编译器,一个是matlab本体的lcc-win32 C2.4.1,另一个是VS2010,选择VS2010所代表的数字,输入2敲回车最后让matlab让你确认编译器的选择,输入y敲回车提示以下信息说明编译器选择完成4.点击工具栏中simulink图标5.弹出simulink编辑界面后,点击工具栏中的打开模型6.找到案例模型TempContrTest.mdl,点击打开7.本次案例模型是一个简单的温度控制External Setpoint是设定温度Feedback Temp是当前温度CoolerON是开关量输出8.打开simulation菜单栏,选择configuration parameters进行参数设定(1)进入参数设定后,选择右边的树形栏中的Solver,把其中的Type改成Fixed-step(2)之后选择树形栏中的Code Generation,把其中的System target file改成TwinCAT.tlc 点击Browse可以进行选择(3)继续选择树形栏中的Tc Module,在Publish module和Publish binaries for platform “TwinCAT RealTime(x86)”前打勾(4)最后选择树形栏中的Tc Advanced,把Task assignment改成Default在Add to cyclic caller,Variable cycle time,Export block digram以及Export block diagram debug information前打勾(5)以上操作完成后点击左下角的Apply(6)选择树形栏中的Code Generation,把Generate code only勾选后点击Generate code,随后matlab就开始把这个模型通过TE1400生成TC3所识别的Module了(7)回到matlab主窗口,等看到以下提示说明Module生成完成(8)我们来看下生成的Module会在什么位置可以发现在TwinCAT/3.1/CustomConfig/Modules路径下会生成名字和案例模型名字一样的文件夹TempContrTest打开可以发现里面其实主要是.tmc文件是TC3所需要的,其他都是一些描述文件,所以可以把.tmc文件拷贝出来,给一些没有Matlab的电脑上用9.打开TC3,并新建项目10.把名称改成英文,例如matlabsimulink,点击确认11.打开SYSTEM,右键TcCOM Objects添加新项12.TC3会自动找到之前生成的.tmc文件,选中后点击OK进行添加13.添加好后我们可以发现TcCOM Objects下出现matlab生成的Module,并且3个变量出现在IO位置,方便和PLC程序或者硬件IO进行变量连接14.右键Tasks添加新项名字可以改成matlab,点击OK添加新的Task15.因为我需要实施做温度计算,所以可以这个Task的优先级提高,修改成1,周期用默认的10ms即可16.双击TcCOM Objects下面的Object1(TempContrTest)Depend On改成Manual Config,并把Task分配成之前创建的名为“matlab”的Task17.右键PLC添加新项18.把名称修改为英文,例如test19.编辑一段模拟程序,模拟温度的升降20.程序写好后右键test Project,选择生成开始编译程序21.编译好后在test Instance自动生成3个变量22.接下来要做的就是把PLC中3个变量和matlab中三个变量链接起来Switch→CoolerONSP→External SetpointPV Feedback Temp23.变量链接完成后开始下传配置和程序,选择菜单栏TwinCAT,点击Activate Configuration弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态24.打开PLC菜单,选择“登录到”把程序在线25.打开PLC菜单,选择“启动”把程序运行26.观察程序,看到成功利用matlab温度算法运行程序27.打开Object1(TempContrTest),选择Block Diagram也可以同时观察Matlab温度算法实时状态注:上图中可以看到由一个红色字提示说是非商业的,虽然TE1400插件装上了,但用的还是7天试用版,所以对于试用版有一些限制,查询information system可以看到如下:TC3中Scope View简单使用在之前的基础上来看下TC3下Scope View如何使用,装好TC3后Scope View会自动集成在TC3中1.首先右键“解决方案”选择添加,点击新建项目2.选择TwinCAT Measurement中的Measurement Scope Project,名称改成英文,例如tempcontrol,点击确定3.右键Axis,选择Target Browser4.打开小电脑图标下的Port_851(851),点击MAIN5.把MAIN程序中PV和SP分别添加到同一个坐标上6.保证程序在运行后,点击工具栏中的Record开始记录两个变量7.随后就可以观察到当前PV和SP的示波图下图中绿色是PV,蓝色是SP。
matlab中simulink使用技巧
matlab中simulink使用技巧参加数学建模已经很多年了,算来其中所学多源于网络上各位前辈的无私奉献。
饮水当思源,承志以后继。
故而添加此分类,用于交流我这些年的心得。
心得分为软件和算法两类,软件可能会包括matlab/simulink,maple,mathematica,spss(被收购成了pasw),ansys,ansoft/maxwell,comsol,pscad,tc,算法可能有GA,NNs。
当然,受到专业研究所限,很多时候无法得心应手,献丑于此,只为提醒自己要做到更好。
恰巧,我在自己学校的bbs上申请了相关版面的版主职位,也希望自己能整理出些基础教学,以备后生晚辈们入门。
暂时的想法是,先说些simulink的相关知识,因为工科学生最常用的就是这个仿真环境,而其他软件又恰好对他保留了接口,可以说这个软件成为了算法的中心。
以后将陆续说些simulink不能完成的任务,并推荐能完成这些任务的工具。
开始吧——simulink可以视作matlab下的工具库,matlab版本不断更新,simulink也不断更新,当前版本为matlab2011b。
首先要明确,simulink的作用为求解常微分方程(组)!且这是他唯一的作用!也就是说偏微分方程在simulink中是无法求解的,需要其他工具或软件作为接口,或者你够牛的,就直接写个有限元的程序。
当然,常微分方程是不够的,为适应数字控制电路等离散系统,simulink可以求解离散的常微分方程,也就是差分方程,略微麻烦,不做重点介绍。
然后来看看simulink求解常微分方程(组)的方法,首先要把方程写成如下形式:y1'=f1(y1,y2,...yn,t)y2'=f2(y1,y2...yn,t)...yn'=fn(y1,y2...yn,t)至于如何写成这种形式,就是降阶了,线性代数里说的很多了,比如y1=y;y2=y1'=y';y3=y2'=y''...需要注意的是,等号右侧不能有导数项,如果等号右边出现了导数项,则说明这个方程需要积分一次。
[转载]在simulink环境下实现实时仿真
![[转载]在simulink环境下实现实时仿真](https://img.taocdn.com/s3/m/34001be8900ef12d2af90242a8956bec0975a5c8.png)
[转载]在simulink环境下实现实时仿真原⽂地址:在simulink环境下实现实时仿真作者:⽊叶萧萧在simulink环境下实现实时仿真众所周知,基于simulink的仿真属于伪实时仿真,其仿真时间并不与实际时间同步,⽽与机器执⾏速度和模型复杂度有关。
那么怎样实现simulink环境下的实时仿真呢。
Matlab提供⼀个实时⼯作环境(RTW)⽤于将simulink模型转化成C程序,在外部模式下这个C程序是可以和simulink进⾏数据交换的。
如果在C程序中加⼊时钟中断,就可实现simulink下的实时仿真。
下⾯谈谈这种⽅法的具体实现步骤。
第⼀步、新建模型,这个模型要包含信号显⽰的模块(scope等);第⼆步、设置模型参数。
1.求解器参数设置Solver->Solver options->Type=Fixed-step(必须) 仿真算法为ode5 Fixed step size设置为任意值(0~1)2.实时⼯作空间参数设置当Category为Target configuration时,单击Browse选择⽣成代码的类型,这⾥我们选择通⽤实时malloc代码格式--grt_malloc.tlc,同时修改模板联编⽂件(Template makefile)为:grt_malloc_vc.tmf,其他默认。
将Category切换⾄GRT code generation options,选择External mode复选框,使产⽣的代码⽀持外部模式。
第三步、修改grt_main.c⽂件,在其中加⼊时钟中断代码。
grt_malloc_main.c是通⽤实时malloc c程序的main函数实现⽂件,RTW在代码⽣成过程将⾃动将其与模型代码编译链接成可执⾏⽂件。
grt_malloc_main.c位于<matlabroot>rtwcgrt_malloc⽬录下。
关于时钟中断代码的添加问题,参看下⾯关于"添加时间中断代码"的介绍。
MATLAB-Simulink用法
MATLAB-Simulink用法Simulink仿真环境基础学习Simulink是面向框图的仿真软件。
7.1演示一个Simulink的简单程序【例7.1】创建一个正弦信号的仿真模型。
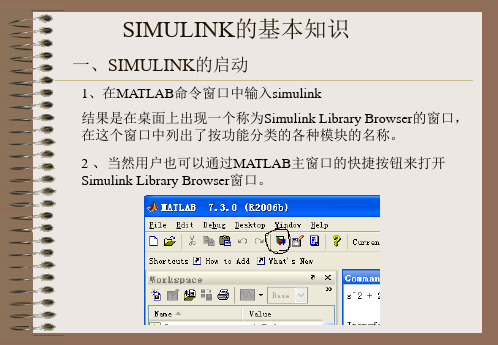
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图7.2所示。
图7.2 Simulink界面(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
(13)Matlabsimulink使用篇
使用篇1.以管理员身份运行matlab2.登录后把当前文件夹改成C盘,找到TwinCAT→Functions→TE1400→SetupTwinCATTarget.p3.找到这个文件后右键选择Run,注意:这一步是为了选择matlabsimulink编译的module所需要的编译器种类,是第一次运行使用matlab+TE1400的时候必须执行的,以后就不必每次都操作这一步。
运行后在matlab主窗口提示让你选择是否用本地的编译器因为本地有VS2010的编译器,所以选择y后敲回车随后matlab找到本地有两种编译器,一个是matlab本体的lcc-win32 C2.4.1,另一个是VS2010,选择VS2010所代表的数字,输入2敲回车最后让matlab让你确认编译器的选择,输入y敲回车提示以下信息说明编译器选择完成4.点击工具栏中simulink图标5.弹出simulink编辑界面后,点击工具栏中的打开模型6.找到案例模型TempContrTest.mdl,点击打开7.本次案例模型是一个简单的温度控制External Setpoint是设定温度Feedback Temp是当前温度CoolerON是开关量输出8.打开simulation菜单栏,选择configuration parameters进行参数设定(1)进入参数设定后,选择右边的树形栏中的Solver,把其中的Type改成Fixed-step(2)之后选择树形栏中的Code Generation,把其中的System target file改成TwinCAT.tlc 点击Browse可以进行选择(3)继续选择树形栏中的Tc Module,在Publish module和Publish binaries for platform “TwinCAT RealTime(x86)”前打勾(4)最后选择树形栏中的Tc Advanced,把Task assignment改成Default在Add to cyclic caller,Variable cycle time,Export block digram以及Export block diagram debug information前打勾(5)以上操作完成后点击左下角的Apply(6)选择树形栏中的Code Generation,把Generate code only勾选后点击Generate code,随后matlab就开始把这个模型通过TE1400生成TC3所识别的Module了(7)回到matlab主窗口,等看到以下提示说明Module生成完成(8)我们来看下生成的Module会在什么位置可以发现在TwinCAT/3.1/CustomConfig/Modules路径下会生成名字和案例模型名字一样的文件夹TempContrTest打开可以发现里面其实主要是.tmc文件是TC3所需要的,其他都是一些描述文件,所以可以把.tmc文件拷贝出来,给一些没有Matlab的电脑上用9.打开TC3,并新建项目10.把名称改成英文,例如matlabsimulink,点击确认11.打开SYSTEM,右键TcCOM Objects添加新项12.TC3会自动找到之前生成的.tmc文件,选中后点击OK进行添加13.添加好后我们可以发现TcCOM Objects下出现matlab生成的Module,并且3个变量出现在IO位置,方便和PLC程序或者硬件IO进行变量连接14.右键Tasks添加新项名字可以改成matlab,点击OK添加新的Task15.因为我需要实施做温度计算,所以可以这个Task的优先级提高,修改成1,周期用默认的10ms即可16.双击TcCOM Objects下面的Object1(TempContrTest)Depend On改成Manual Config,并把Task分配成之前创建的名为“matlab”的Task17.右键PLC添加新项18.把名称修改为英文,例如test19.编辑一段模拟程序,模拟温度的升降20.程序写好后右键test Project,选择生成开始编译程序21.编译好后在test Instance自动生成3个变量22.接下来要做的就是把PLC中3个变量和matlab中三个变量链接起来Switch→CoolerONSP→External SetpointPV Feedback Temp23.变量链接完成后开始下传配置和程序,选择菜单栏TwinCAT,点击Activate Configuration弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态24.打开PLC菜单,选择“登录到”把程序在线25.打开PLC菜单,选择“启动”把程序运行26.观察程序,看到成功利用matlab温度算法运行程序27.打开Object1(TempContrTest),选择Block Diagram也可以同时观察Matlab温度算法实时状态注:上图中可以看到由一个红色字提示说是非商业的,虽然TE1400插件装上了,但用的还是7天试用版,所以对于试用版有一些限制,查询information system可以看到如下:TC3中Scope View简单使用在之前的基础上来看下TC3下Scope View如何使用,装好TC3后Scope View会自动集成在TC3中1.首先右键“解决方案”选择添加,点击新建项目2.选择TwinCAT Measurement中的Measurement Scope Project,名称改成英文,例如tempcontrol,点击确定3.右键Axis,选择Target Browser4.打开小电脑图标下的Port_851(851),点击MAIN5.把MAIN程序中PV和SP分别添加到同一个坐标上6.保证程序在运行后,点击工具栏中的Record开始记录两个变量7.随后就可以观察到当前PV和SP的示波图下图中绿色是PV,蓝色是SP。
Matlab与Simulink仿真学习心得
Matlab与Simulink仿真学习心得班级:07610 学号:072016 姓名:吕天雄一 Matlab学习心得体会与编程实践<1>学习Matlab的心得体会真正开始接触Matlab是大二上就开始了,到现在已经一年多了,在此之间,Matlab的确为我提供了很多便利。
Matlab的确不愧成为是草稿纸上的语言。
我们不必去为很简单的显示效果图形去找一些什么其他软件或者研究比较复杂的计算机图形学,一个plot或者别的函数往往就可以得到很满意的效果。
其实最初开始学习matlab的时候感觉这个东西和C没什么两样,但是后来具体到一些东西,比如信号处理和数学建模上以后才感觉到使用matlab编写程序去验证结果比C要节省很多时间,而且matlab写东西基本都是按照自己的思路平铺直叙很少去考虑什么函数的嵌套调用或者指针等等很头疼的东西。
关于matlab的学习,我感觉其实百度和matlab自带的help基本能够解决绝大数问题,而且一些比较好的论坛比如都会为你产生很大的帮助,关键是在于多动手实践,多思考。
但是matlab毕竟只是一个工具,原理和一些基本的编程素质还是必须有的,否则matlab最多也只能是验证一些别人的东西而已,根本帮不上什么忙的。
<2>遇到的一些问题的思考方式与解决办法最开始用matlab的时候是在大物实验,实验要求去根据测量得到的数据作出图。
但是手动用铅笔去画确实很麻烦,所以用matlab确实可以省去很大的麻烦。
但是第一次遇到问的时候是有关极化坐标下的曲线拟合。
首先是一个物理实验的问题;在做一个关于光的偏振的实验的时候,最后的结果要在一个极化坐标下显示出来;因为数据是离散的,所以显示出来的图像是一个折来折去的一个东东;然后很自然的想法是对这个曲线进行插值处理。
但是极化坐标下MATLAB并未提供插值处理的函数,interp1这个函数只能在笛卡尔坐标系,也就是直角坐标系下使用。
基于Matlab_Simulink的交互式实时仿真
基于 !"#$"% & ’()*$(+, 的交互式实时仿真
常 青 邢 超 李言俊 ( 西北工业大学航天工程学院, 西安 T&""T! )
!$!
共享内存的分配与操作
在 K+.FA ) !""" 系统中, 可以通过使用共享内存来解决这
个问题。共享内存是计算机内存中的一块特殊区域。可以被多 个程序进行写入与读取操作, 从而实现多个应用程序之间的数 据交换。 012 文件可以通过共享内存与外部程序进行数 据 交 换, 从而实现交互式仿真。在 K+.<=L7 中唯一可以实现多应用
得 到 了 广 泛 的 应 用 。 在 控 制 理 论 研 究 中 可 以 利 用 ’()*(+ , 系统 -./0*.12 方便地进行控制规律的设计与仿真。自动控 制 、 仿真的教学实验中也要利用 ’()*(+ 软 件 对 控 制 系 统 进 行 辅 助 教学与仿真分析。 仿真实验中经常还需要连接外部硬件仿真设 备进行实时仿真研 究 。 但 是 因 为 ’()*(+ , -./0*.12 缺 乏 实 时 仿 真的能力。 通常需要另外编写能进行实时仿真的应用程序进行 这项工作。 这种方式下, 实时仿真软件功能比较单一, 重复性工 作较多, 并且调试困难。该文针对如何在 ’()*(+ , -./0*.12 环境 下进行实时仿真 , 控制进行了探索。利用 ’()*(+ , -./0*.12 与外 部程序的接口通过共享内存与外部控制程序进行数据交换。 可 以实现精度较高的实时仿真以及对外部硬件仿真设备进行控 制。 并且在仿真过程中可以随时进行相关参数及控制规律的调 整。 ’()*(+ , -./0*.12 通过 ’34 文件与 - 函数可对外部程序进 行调用, 充分利用这种功能, 编写相应的 ’34 文件与 - 函数及 外部应用程序即可 实 现 基 于 ’()*(+ , -./0*.12 的 交 互 式 实 时 仿 真。更进一步, 可以使 ’()*(+ , -./0*.12 初步实现实时分布式仿 真的功能。
Matlab与Simulink仿真学习心得
Matlab与Simulink仿真学习心得班级:07610 学号:072016 姓名:吕天雄一 Matlab学习心得体会与编程实践<1>学习Matlab的心得体会真正开始接触Matlab是大二上就开始了,到现在已经一年多了,在此之间,Matlab的确为我提供了很多便利。
Matlab的确不愧成为是草稿纸上的语言。
我们不必去为很简单的显示效果图形去找一些什么其他软件或者研究比较复杂的计算机图形学,一个plot或者别的函数往往就可以得到很满意的效果。
其实最初开始学习matlab的时候感觉这个东西和C没什么两样,但是后来具体到一些东西,比如信号处理和数学建模上以后才感觉到使用matlab编写程序去验证结果比C要节省很多时间,而且matlab写东西基本都是按照自己的思路平铺直叙很少去考虑什么函数的嵌套调用或者指针等等很头疼的东西。
关于matlab的学习,我感觉其实百度和matlab自带的help基本能够解决绝大数问题,而且一些比较好的论坛比如都会为你产生很大的帮助,关键是在于多动手实践,多思考。
但是matlab毕竟只是一个工具,原理和一些基本的编程素质还是必须有的,否则matlab最多也只能是验证一些别人的东西而已,根本帮不上什么忙的。
<2>遇到的一些问题的思考方式与解决办法最开始用matlab的时候是在大物实验,实验要求去根据测量得到的数据作出图。
但是手动用铅笔去画确实很麻烦,所以用matlab确实可以省去很大的麻烦。
但是第一次遇到问的时候是有关极化坐标下的曲线拟合。
首先是一个物理实验的问题;在做一个关于光的偏振的实验的时候,最后的结果要在一个极化坐标下显示出来;因为数据是离散的,所以显示出来的图像是一个折来折去的一个东东;然后很自然的想法是对这个曲线进行插值处理。
但是极化坐标下MATLAB并未提供插值处理的函数,interp1这个函数只能在笛卡尔坐标系,也就是直角坐标系下使用。
matlab实验六、SIMULINK基本用法
三、自定义功能模块的封装 exp5_7.mdl exp5_8.mdl exp5_9.mdl exp5_10.mdl
上面提到的两种方法都只是创建一个功能模块而已,如果要命名该 自定义功能模块、对功能模块进行说明、选定模块外观、设定输入 数据窗口,则需要对其进行封装处理。
首先选中Subsystem功能模块,再打开Edit菜单中的Mask Subsystem 进入mask的编辑窗口,可以看出有3个标签页。 1) Icon:设定功能模块的外观。 2) Initialization:设定输入数据窗口(Prompt List)。
d) dpoly(num,den,’z’):按z次数的降幂排序,在功能模块上显示离散的 传递函数。
用户还可以设置一些参数来控制图标的属性,这些属性在Icon页右下 端的下拉式列表中进行选择。 a) Icon frame:Visible 显示外框线;Invisible:隐藏外框线。
b) Icon Transparency:Opaque 隐藏输入输出的标签;Transparent:显示 输入输出的标签。 c) Icon Rotation:旋转模块。
3) Documentation:设计该功能模块的文字说明。
1、Icon标签页
此页最重要的部分是Drawing Commands,在该区域内可以用disp指 令设定功能模块的文字名称,用plot指令画线,用dpoly指令画转换函 数。
注意,尽管这些命令在名字上和以前讲的MATLAB函数相同,但它 们在功能上却不完全相同,因此不能随便套用以前所讲的格式。
例exp5_2.mdl
exp5_3.mdl
第四节 SIMULINK自定义功能模块
自定义功能模块有两种方法,一种方法是采用Signal&Systems 模块库 中的Subsystem功能模块,利用其编辑区设计组合新的功能模块;另一 种方法是将现有的多个功能模块组合起来,形成新的功能模块。对于 很大的SIMULINK模型,通过自定义功能模块可以简化图形,减少功 能模块的个数,有利于模型的分层构建。 一、方法1 exp5_5.mdl
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB/Simulink下实现实时一些方法总结
总结了使用MATLAB/Simulink进行实时仿真时实现实时的几种方法,包括使用Real-time Workshop和编写S函数的方法,同时通过实验检验了C语言S 函数实时模块的功能。
经仿真测试表明,在对时间精度要求不是很高的过程进行实时仿真和分析时,可以得到较好的效果。
标签:实时;MATLAB/Simulink;Real-time Workshop;S函数
1 概述
仿真技术由于能省去了实物系统实现过程中的繁琐步骤,对问题的解决有着良好的针对性,因此给科研和试验提供了很大的便利[1-3]。
但另一方面,仿真由于对模型的依赖性,其结果并很难完全反映实际情况。
因此,为了得到更接近实际情况的结果,可采用将数学模型与物理模型或实物相结合半实物仿真[1,2]。
半实物仿真系统既包含虚拟对象,又包含实物对象,因此更真实地反映实际系统的动、静态特性和非线性因素。
由于有实物的接入,半实物仿真对实时性有着较高的要求。
Matlab/Smulink在控制理论研究中是一个很优秀的仿真软件,可方便地对控制算法或控制对象进行建模和仿真实验[2-8]。
在仿真情况下,仿真运行的时间取决于仿真机的运行速度和模型的复杂程度等因素,因此Matlab/Smulink模型运行的时间可能远小于实际过程的运行时间。
但在半实物仿真中,实物对象的实际执行时间与模型仿真时间可能不一致,因此有必要使Simulink虚拟模型与外部连接的硬件运行同步,实现实时仿真,以获得接近实际情况的实验结果。
要用Matlab/Smulink进行实时仿真,可以利用自带的Real-Time Workshop和Real-Time Windows Target、xPC Target等工具,也可编写能进行实时仿真的应用程序,灵活地实现实时[4-9]。
本文将针对在Matlab/Smulink环境下的实时仿真、控制,探讨和总结一些实现实时的方法。
2 实现实时的方法
如前所述,用Matlab/Smulink进行实时仿真的方法主要有利用Matlab/Smulink自带的实时工具和自编实时程序两类。
本文分别以Real-Time Workshop工具和自编S函数为例进行探讨。
2.1 用Real-Time Workshop实现实时
Real-Time Workshop(RTW)是一个和Simulink配套使用的工具[4,5]。
RTW可以由Simulink框图生成优化的语言代码,再由生成的代码建立半实物仿真并产生实时控制与快速原型设计所需的应用程序,得到的应用程序可独立于MATLAB环境,因此能实现实时同步并可应用于实时的工业过程中。
利用RTW 进行实时仿真的步骤大致如下:
首先,建立Simulink仿真模型;然后配置相关RTW参数,一般设置为定步长Fixed_Step,单任务single tasking,external模式;接着点击build按钮对目标进行编译,自动生成C代码文件,生成的C代码可用C或者C++编译器作适当修改,并编译连接。
最后,点击connect按钮,与目标进行连接(connect to target),运行仿真模型,对系统过程进行分析。
值得指出的是RTW支持多种常用的I/O设备,例如模数转换器(A/D)、数模转换器(D/A)计数器(counter)等[6]。
在Simulink模块库下双击xPC Target 模块组图标可相应显示出I/O设备的型号等。
这样就可以将虚拟的Smulink模型与实际的受控对象或实际的控制器通过I/O设备和计算机连接起来,构成半实物仿真系统,进行仿真分析、过程控制等。
2.2 编写S函数实现实时
由于RTW只支持部分型号I/O设备的驱动,而且也不能直接和一些常用的控制软件进行实时通信,这给使用RTW进行实时仿真带来了一定的局限性。
此时用户可根据需要,编写能实现特定功能的S函数(S-Function)。
S函数可使用Matlab或者C语言编写。
S函数编写灵活,只要在函数程序模板适当的位置加入自己的代码,然后编译,就生成实现相应功能的Simulink模块,并可以随时调用。
而且,Matlab还给用户提供了开放性接口,可对系统的时钟和端口进行操作。
这为用其他方法灵活实现实时仿真提供了可能。
根据S函数程序的执行流程,可以在计算离散状态更新值时设置一个空循环等待,原理如图1示,只有当模型实际运行时间current-start(即系统时间)达到设置的仿真时间t,仿真才结束,这样就可以使Simulink仿真时间与实际时间同步[6-9]。
要注意的是,如果是C文件的S函数,还要用MATLAB的mex工具对其进行编译,生成.dll文件。
在使用时,只要将生成的S函数模块添加到Simulink 模型中,便可使系统模型运行于实时时间。
为了验证这一实现实时的方法,根据图1所示的实现同步的原理,可把系统时间、仿真时间以及它们的时间差值作为系统的输出向量,编写名为“sfuntmpl_basic.c”的C文件,对其编译后生成sfuntmpl_basic.dll文件。
然后建立控制过程半实物仿真平台[2],用上位机的控制软件对Matlab/Smulink虚拟对象进行实时控制。
其中,adsoft S-函数模块是访问PCI-1710A/D的接口模块,把上位机的控制变量传递给虚拟对象;Dasoft S-函数模块实现虚拟对象与PCI-1710 D/A的对接,把被控变量输出给上位机;sfuntmpl_basic模块用于支持Simulink 模型进行实时运行。
设置好仿真参数、仿真时间后,即可开始运行仿真。
通过示波器Scope可观察到的sfuntmpl_basic实时功能模块输出响应曲线,从输出的结果分析中可知,仿真时间与系统时间基本重合,两者的时间差值也很微小[2]。
另外,从控制软件实时监控界面可观测到控制效果,仿真过程也表明,控制软件能对Smulink虚拟对象进行实时控制[2]。
并且,从仿真结果分析可知,利用这一方法对时间精度要求不是很高的过程仿真实现实时是可行的。
3 结论
本文探讨和总结了MATLAB/Simulink下能实现实现实时仿真的一些方法,即可用Real-Time Workshop实现实时,也可通过编写S函数实现实时。
经仿真测试表明,在对时间精度要求不是很高的过程进行实时仿真和分析时,可以得到令人满意的效果。
参考文献:
[1]黄建强,鞠建波.半实物仿真技术研究现状及发展趋势[J].舰船电子工程,2011,31(07):5-7,25.
[2]徐剑琴.控制过程实时仿真平台的设计与实现[D].南宁:广西大学,2006.
[3]Li K,Zhang Y. Fault-tolerant motion planning and control of redundant manipulator[J]. Control Engineering Practice,2012,20(03):282-292.
[4]MATLAB Real-Time Workshop User’s Guide[M]. The MathWorks,Inc.2010.
[5]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[6]黄家田,梁述海,李雁飞.基于RTW的闭环控制系统平台设计[J].舰船电子工程,2004,24(04):86-87,98.
[7]郑志波.基于MATLAB环境的实时仿真研究[D].武汉:武汉水利水电大学,2000:26-29.
[8]周洪,钟明慧.控制系统的一种简单实时在线仿真方法[J].系统仿真学报,2003,15(12):1753-1755.
[9]杨辰.多变量控制系统的实时在线仿真系统研究[D].武汉:武汉大学,2002.
作者简介:徐剑琴(1979-),女,广西北海人,硕士研究生,讲师,研究方向:智能控制。