基于深度学习和迁移学习联合的RGB-D语义分割模型研究
《2024年基于语义分割的动态场景下3D稠密面元重建研究》范文
《基于语义分割的动态场景下3D稠密面元重建研究》篇一一、引言随着计算机视觉技术的不断发展,三维重建技术已成为计算机视觉领域的重要研究方向之一。
在动态场景下,进行高精度的3D稠密面元重建具有重要的实际应用价值。
而基于语义分割的3D面元重建方法,可以在保证重建精度的同时,有效提高重建效率。
本文将介绍基于语义分割的动态场景下3D稠密面元重建研究的目的、背景、研究现状及意义。
二、相关研究概述近年来,随着深度学习技术的发展,基于深度学习的语义分割技术在三维重建领域得到了广泛应用。
传统的三维重建方法往往忽略了场景中不同物体的语义信息,导致重建结果不准确。
因此,基于语义分割的3D面元重建方法逐渐成为研究热点。
该方法通过将语义分割技术应用于三维点云数据,提取出不同物体的边界信息,进而实现高精度的面元重建。
三、方法与技术本文提出的基于语义分割的动态场景下3D稠密面元重建方法主要包括以下几个步骤:1. 数据获取与预处理:通过深度相机或激光扫描仪等设备获取动态场景的三维点云数据。
然后对点云数据进行去噪、补全等预处理操作,以提高后续处理的准确性。
2. 语义分割:利用深度学习模型对预处理后的点云数据进行语义分割,提取出不同物体的边界信息。
这里可以采用基于卷积神经网络的点云语义分割模型,如PointNet、PointNet++等。
3. 面元提取与重建:根据语义分割结果,提取出不同物体的面元信息。
然后采用基于面元的重建算法,如泊松重建算法等,实现高精度的面元重建。
4. 动态场景处理:针对动态场景中的运动物体,采用光流法或深度学习模型进行运动估计与补偿,以提高重建的鲁棒性。
四、实验与分析本文在多个动态场景下进行了实验,验证了所提方法的有效性。
实验结果表明,基于语义分割的3D面元重建方法可以有效提高重建精度和效率。
与传统的三维重建方法相比,所提方法在处理复杂动态场景时具有更好的鲁棒性和准确性。
此外,我们还对不同算法参数进行了分析,以找到最优的参数组合。
《2024年基于多尺度和注意力机制融合的语义分割模型研究》范文
《基于多尺度和注意力机制融合的语义分割模型研究》篇一一、引言随着深度学习和计算机视觉技术的飞速发展,语义分割作为一种重要的计算机视觉任务,受到了广泛关注。
语义分割旨在将图像中的每个像素分配一个预定义的类别标签,从而实现对图像内容的理解和分析。
然而,由于实际场景中图像的复杂性和多样性,语义分割任务面临着诸多挑战,如多尺度目标、上下文信息等。
近年来,基于多尺度和注意力机制融合的语义分割模型成为研究热点,本文将对该领域的研究进行探讨。
二、研究背景及现状在语义分割领域,多尺度特征融合和注意力机制的应用具有重要意义。
多尺度特征融合可以有效地捕获不同尺度的目标信息,提高分割精度;而注意力机制则可以帮助模型关注重要区域,抑制无关区域,从而提高分割速度和准确性。
目前,已有许多学者在该方向进行了研究,提出了多种基于多尺度和注意力机制的语义分割模型。
三、模型构建本文提出了一种基于多尺度和注意力机制融合的语义分割模型。
该模型主要包括以下几个部分:1. 多尺度特征提取:通过使用不同大小的卷积核和池化操作,提取多尺度的特征信息。
这些特征信息包括低层次的边缘、纹理等细节信息和高层次的语义信息。
2. 特征融合:将提取的多尺度特征进行融合,以获得更丰富的特征表示。
本文采用了一种基于上采样和下采样的特征融合方法,将不同尺度的特征进行融合,从而得到更准确的分割结果。
3. 注意力机制:在模型中引入了注意力机制,通过学习每个像素的权重,使得模型能够关注重要区域,抑制无关区域。
本文采用了一种基于自注意力的机制,通过对每个像素进行自注意力计算,得到每个像素的权重。
4. 损失函数:为了更好地优化模型,本文采用了一种基于交叉熵损失和Dice损失的联合损失函数。
该损失函数可以同时考虑像素级别的分类准确性和区域级别的分割准确性。
四、实验与分析为了验证本文提出的模型的性能,我们在多个公开数据集上进行了实验。
实验结果表明,本文提出的模型在语义分割任务上取得了较好的性能。
《2024年基于多尺度和注意力机制融合的语义分割模型研究》范文
《基于多尺度和注意力机制融合的语义分割模型研究》篇一一、引言语义分割是计算机视觉领域中的一项重要任务,旨在将图像中的每个像素进行准确的分类,进而实现对图像的精确理解和解析。
随着深度学习技术的快速发展,基于卷积神经网络的语义分割模型已经成为研究的热点。
本文将重点研究一种基于多尺度和注意力机制融合的语义分割模型,以实现更高的分割精度和效率。
二、相关文献综述近年来,语义分割领域取得了显著的进展。
许多研究者通过引入不同的技术和方法,如全卷积网络(FCN)、U-Net等,来提高模型的分割性能。
其中,多尺度特征融合和注意力机制被广泛应用于提升模型的性能。
多尺度特征融合可以捕捉到不同尺度的上下文信息,提高分割的鲁棒性;而注意力机制则可以自动学习重要区域和特征,从而提高模型的分割精度。
然而,目前这些方法仍然存在一些问题,如计算复杂度高、分割精度不够高等。
因此,研究一种基于多尺度和注意力机制融合的语义分割模型具有重要意义。
三、方法论本文提出的基于多尺度和注意力机制融合的语义分割模型主要包括以下两部分:1. 多尺度特征融合为了捕捉不同尺度的上下文信息,本文采用了一种多尺度特征融合的方法。
具体而言,我们通过引入不同尺度的卷积核和池化操作来获取不同尺度的特征图,然后通过上采样和下采样操作将这些特征图进行融合。
这样,模型可以同时获取到不同尺度的上下文信息,从而提高分割的鲁棒性。
2. 注意力机制为了进一步提高模型的分割精度,我们引入了注意力机制。
具体而言,我们采用了一种自注意力机制,通过在卷积层之间引入注意力权重来自动学习重要区域和特征。
这样,模型可以更加关注图像中的关键区域和特征,从而提高分割的准确性。
四、实验设计与结果分析为了验证本文提出的模型的有效性,我们进行了大量的实验。
实验中,我们采用了Cityscapes等公开数据集进行训练和测试。
实验结果表明,本文提出的模型在语义分割任务上取得了显著的性能提升。
具体而言,我们的模型在多尺度特征融合和注意力机制的共同作用下,能够更加准确地捕捉到图像中的关键区域和特征,从而提高了分割的精度和效率。
基于深度学习与强化学习的图像语义分割研究

基于深度学习与强化学习的图像语义分割研究近年来,深度学习和强化学习已经成为机器学习领域的热门研究方向。
其中,深度学习在图像处理、语音识别、自然语言处理等领域都有广泛的应用。
而对于图像语义分割任务,深度学习的表现也十分优秀,越来越多的研究者开始探索如何利用深度学习实现更精准的语义分割。
本文将围绕基于深度学习和强化学习解决图像语义分割问题的相关研究展开探讨。
首先,我们需要了解什么是图像语义分割。
简单来说,图像语义分割就是将图像中的每个像素点分配给它所属的特定类别。
例如,对于一张人物照片,我们需要将照片中的每个像素点分配为“人体”、“背景”等类别。
在实际应用中,图像语义分割有着广泛的应用场景,如自动驾驶、医疗诊断、视频分析等。
在传统的计算机视觉领域,人们通常采用手工设计的特征提取方法和基于像素的分类方法来解决图像语义分割问题。
然而由于这种方法需要大量的人工设计,很难面对实际应用中不断变化的问题。
因此,近年来,基于深度学习的图像语义分割方法逐渐成为主流。
这种方法能够通过学习大量数据来自动地学习到更准确、更复杂的特征,从而提高分割的精度和速度。
基于深度学习的图像语义分割方法通常包括以下几个阶段:建立神经网络模型、数据训练、预测和评估。
在建立神经网络模型时,常用的方法有基于卷积神经网络(Convolutional Neural Network,CNN)的方法和基于全卷积神经网络(Fully Convolutional Network,FCN)的方法。
其中,FCN方法是将经典卷积神经网络模型中的全连接层替换成卷积层,从而实现了对整张图像的像素级别的分类。
这种方法的优势在于提高了分割的准确率和速度。
在数据训练阶段,我们需要将大量的已有标注数据送入神经网络模型中进行训练。
在训练过程中,我们通过优化损失函数来使得预测的结果与标注数据的差距最小化,从而提高模型的泛化能力和准确度。
在预测阶段,我们将新的图像数据输入到经过训练的神经网络模型中,从而获得每个像素属于不同类别的概率。
基于RGB和深度双模态的温室番茄图像语义分割模型
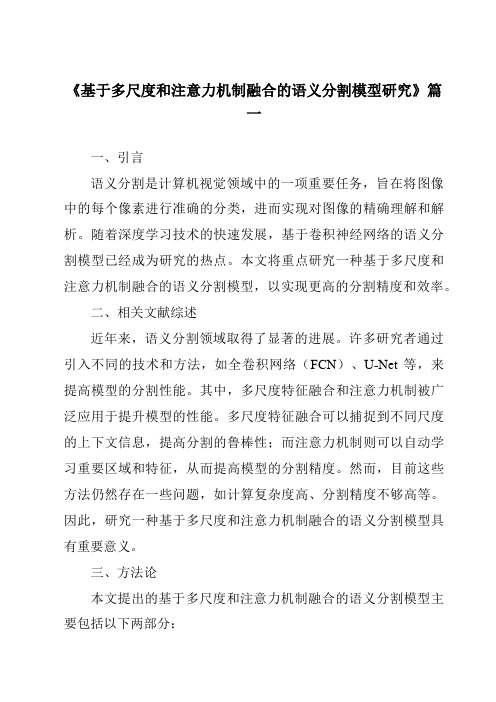
基于RGB和深度双模态的温室番茄图像语义分割模型张羽丰;杨景;邓寒冰;周云成;苗腾【期刊名称】《农业工程学报》【年(卷),期】2024(40)2【摘要】图像语义分割作为计算机视觉领域的重要技术,已经被广泛用于设施环境下的植物表型检测、机器人采摘、设施场景解析等领域。
由于温室环境下未成熟番茄果实与其茎叶之间具有相似颜色,会导致图像分割精度不高等问题。
该研究提出一种基于混合Transformer编码器的“RGB+深度”(RGBD)双模态语义分割模型DFST(depth-fusion semantic transformer),试验在真实温室光照情况下获得深度图像,对深度图像做HHA编码并结合彩色图像输入模型进行训练,经过HHA编码的深度图像可以作为一种辅助模态与RGB图像进行融合并进行特征提取,利用轻量化的多层感知机解码器对特征图进行解码,最终实现图像分割。
试验结果表明,DFST 模型在测试集的平均交并比可达96.99%,对比不引入深度图像的模型,其平均交并比提高了1.37个百分点;DFST模型对比使用卷积神经网络作为特征提取主干网络的RGBD语义分割模型Shape Conv,其平均交并比提高了2.43个百分点。
结果证明,深度信息有助于提高彩色图像的语义分割精度,可以明显提高复杂场景语义分割的准确性和鲁棒性,同时也证明了Transformer结构作为特征提取网络在图像语义分割中也表现出了良好的性能,可为温室环境下的番茄图像语义分割任务提供解决方案和技术支持。
【总页数】12页(P295-306)【作者】张羽丰;杨景;邓寒冰;周云成;苗腾【作者单位】沈阳农业大学信息与电气工程学院;辽宁农业信息化工程技术研究中心【正文语种】中文【中图分类】S126【相关文献】1.基于注意力感知和语义感知的RGB-D室内图像语义分割算法2.基于多尺度轮廓增强的RGB-IR双波段图像语义分割算法3.基于多模态自适应卷积的RGB-D图像语义分割4.基于深度学习通道交换的多模态脑肿瘤图像融合的分割模型5.基于不确定性增强的RGB-IR双波段图像语义分割算法因版权原因,仅展示原文概要,查看原文内容请购买。
基于跨模态学习与领域自适应RGBD图像语义分割方法[发明专利]
![基于跨模态学习与领域自适应RGBD图像语义分割方法[发明专利]](https://img.taocdn.com/s3/m/018d0cf7370cba1aa8114431b90d6c85ed3a884e.png)
专利名称:基于跨模态学习与领域自适应RGBD图像语义分割方法
专利类型:发明专利
发明人:刘伟,郭永发,余晓霞,刘家伟,张苗辉
申请号:CN202210328137.4
申请日:20220331
公开号:CN114419323A
公开日:
20220429
专利内容由知识产权出版社提供
摘要:基于跨模态学习与领域自适应RGBD图像语义分割方法,该方法采用RGB和深度图像两种模态的数据作为输入,构造基于跨模态的图像语义分割网络;该方法采用Jensen‑Shannon散度使网络各个分支的语义分割结果尽量一致。
该方法设计了一套基于对抗生成式的领域自适应方法,把语义分割网络作为生成器得到三个语义分割结果;并设计了三个判别器,分别以三个语义分割结果作为判别器的输入;生成器尽量使源领域和目标领域的语义分割在分布上一致;判别器目的是正确区分语义分割结果是来自哪个领域;生成器和判别器的目的相悖,在不断博弈中相互提高,最终实现不同领域在输出层面的对齐,即RGBD数据跨领域的高精度标注。
申请人:华东交通大学
地址:330013 江西省南昌市经济技术开发区双港东大街808号
国籍:CN
代理机构:南昌市平凡知识产权代理事务所
代理人:姚伯川
更多信息请下载全文后查看。
基于迁移学习的图像语义分割技术研究
基于迁移学习的图像语义分割技术研究迁移学习是一种通过利用在一个任务上学到的知识和经验来改善在另一个相关任务上的表现的机器学习方法。
近年来,基于迁移学习的图像语义分割技术在计算机视觉领域得到了广泛的研究和应用。
本文将探讨该技术的研究进展、应用场景以及面临的挑战。
图像语义分割是将图像中的每个像素标记为不同的类别,是图像理解和分析的重要任务之一。
在传统的图像语义分割方法中,一般需要大量的标注数据和计算资源来训练和测试模型。
然而,在实际应用中,获取大规模标注数据并进行模型训练是非常昂贵和耗时的。
基于迁移学习的图像语义分割技术有效地解决了该问题,可以利用已有的标注数据和模型来改善在相似任务上的表现。
基于迁移学习的图像语义分割技术主要可以分为两种类型:基于特征的迁移和基于模型的迁移。
基于特征的迁移方法通过将预训练的卷积神经网络模型中的特征提取部分作为固定的特征提取器,然后在这个基础上训练一个新的分类器来完成目标任务。
这种方法能够利用在大规模图像分类数据上预训练的模型来提取出图像的高级语义特征,从而改善图像语义分割的准确性。
基于模型的迁移方法则通过将一个与目标任务密切相关的 pretrained 模型的部分或者全部参数作为初始参数,然后在目标任务上进行微调来学习更细粒度的特征表示。
基于迁移学习的图像语义分割技术在许多实际问题中取得了显著的效果。
例如,在医疗影像领域,透过将基于迁移学习的图像语义分割技术应用于不同类型的肿瘤检测、疾病诊断和治疗跟踪等任务中,可以大大提高准确性和效率。
此外,基于迁移学习的图像语义分割技术也广泛应用于自动驾驶、无人机图像分析、工业质检等领域,为解决实际问题提供了强有力的工具。
然而,基于迁移学习的图像语义分割技术仍然面临一些挑战。
首先,选择合适的预训练模型和特征提取器对于迁移学习的效果至关重要。
不同的任务和数据集对预训练模型的要求可能不同,因此如何选择适合的模型和特征提取器仍然是一个研究热点和难点。
《基于多尺度和注意力机制融合的语义分割模型研究》范文
《基于多尺度和注意力机制融合的语义分割模型研究》篇一一、引言随着深度学习技术的不断发展,语义分割作为计算机视觉领域的重要任务之一,受到了广泛关注。
语义分割旨在将图像中的每个像素划分为预定义的类别,从而实现对图像的精细标注。
然而,由于实际场景中存在复杂的背景、多样的目标物体以及不同尺度的目标等问题,传统的语义分割模型往往难以准确地进行像素级分类。
为了解决这些问题,本文提出了一种基于多尺度和注意力机制融合的语义分割模型。
二、相关工作近年来,许多学者在语义分割领域进行了深入研究,并提出了许多有效的模型。
这些模型主要从特征提取、上下文信息以及空间信息等方面进行改进。
在特征提取方面,卷积神经网络(CNN)被广泛应用于提取图像的多层次特征。
然而,由于语义分割需要综合考虑不同尺度的目标物体,因此多尺度特征融合成为了一个重要的研究方向。
此外,注意力机制也被引入到语义分割模型中,以提高模型对关键区域的关注度。
三、方法本文提出的模型主要包括两个部分:多尺度特征融合和注意力机制。
在多尺度特征融合方面,我们采用了金字塔池化模块和上采样模块来提取不同尺度的特征。
金字塔池化模块可以提取到多层次的上下文信息,而上采样模块则可以将低层次的特征与高层次的特征进行融合,从而得到更为丰富的特征表示。
在注意力机制方面,我们采用了自注意力机制来增强模型对关键区域的关注度。
自注意力机制可以捕捉到像素之间的依赖关系,从而提高模型的表达能力。
四、实验为了验证本文提出的模型的有效性,我们在多个公开数据集上进行了实验。
实验结果表明,我们的模型在语义分割任务上取得了较好的性能。
具体来说,我们的模型在多个指标上均取得了较高的准确率,并且在处理复杂场景和不同尺度的目标时表现出较好的鲁棒性。
此外,我们还进行了消融实验来分析模型中各个组件的作用。
实验结果表明,多尺度特征融合和注意力机制都对模型的性能提升起到了重要作用。
五、结果与讨论本文提出的基于多尺度和注意力机制融合的语义分割模型在多个公开数据集上取得了较好的性能。
一种基于RGB-D图像的视觉语义关系检测方法[发明专利]
![一种基于RGB-D图像的视觉语义关系检测方法[发明专利]](https://img.taocdn.com/s3/m/68a667117c1cfad6185fa733.png)
专利名称:一种基于RGB-D图像的视觉语义关系检测方法专利类型:发明专利
发明人:甘明刚,刘晓舟,陈杰,窦丽华
申请号:CN202010126145.1
申请日:20200228
公开号:CN111368829A
公开日:
20200703
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于RGB‑D图像的视觉语义关系检测方法,首先提取图像的RGB特征向量的同时估计出图像的深度图并提取对应的深度特征向量,将RGB特征向量与深度特征向量相融合;将融合的特征向量输入视觉语义关系分类器,所述视觉语义关系分类器设计为同时处理RGB特征向量与深度特征向量并弱化深度特征向量部分,得到视觉语义关系检测结果。
能够提高复杂视觉场景中视觉语义关系的检测精度和泛化能力。
申请人:北京理工大学
地址:100081 北京市海淀区中关村南大街5号
国籍:CN
代理机构:北京理工大学专利中心
代理人:温子云
更多信息请下载全文后查看。
基于注意力机制的轻量级RGB-D图像语义分割网络
第43卷 第3期 包 装 工 程2022年2月PACKAGING ENGINEERING ·264·收稿日期:2021-06-11基金项目:上海市科学技术委员会科研计划(180****2500)作者简介:孙刘杰(1965—),男,博士,上海理工大学教授,主要研究方向为光信息处理技术、印刷机测量与控制技术、数字印刷防伪技术、图文信息处理技术。
基于注意力机制的轻量级RGB-D 图像语义分割网络孙刘杰,张煜森,王文举,赵进(上海理工大学,上海 200093)摘要:目的 针对卷积神经网络在RGB-D (彩色-深度)图像中进行语义分割任务时模型参数量大且分割精度不高的问题,提出一种融合高效通道注意力机制的轻量级语义分割网络。
方法 文中网络基于RefineNet ,利用深度可分离卷积(Depthwise separable convolution)来轻量化网络模型,并在编码网络和解码网络中分别融合高效的通道注意力机制。
首先RGB-D 图像通过带有通道注意力机制的编码器网络,分别对RGB 图像和深度图像进行特征提取;然后经过融合模块将2种特征进行多维度融合;最后融合特征经过轻量化的解码器网络得到分割结果,并与RefineNet 等6种网络的分割结果进行对比分析。
结果 对提出的算法在语义分割网络常用公开数据集上进行了实验,实验结果显示文中网络模型参数为90.41 MB ,且平均交并比(mIoU )比RefineNet 网络提高了1.7%,达到了45.3%。
结论 实验结果表明,文中网络在参数量大幅减少的情况下还能提高了语义分割精度。
关键词:RGB-D 图像;语义分割;深度可分离卷积;通道注意力中图分类号:TP391 文献标识码:A 文章编号:1001-3563(2022)03-0264-10 DOI :10.19554/ki.1001-3563.2022.03.033Lightweight Semantic Segmentation Network for RGB-D Image Basedon Attention MechanismSUN Liu-jie , ZHANG Yu-sen , WANG Wen-ju , ZHAO Jin(University of Shanghai for Science and Technology, Shanghai 200093, China)ABSTRACT: The work aims to propose a lightweight semantic segmentation network incorporating efficient channel at-tention mechanism to solve the problem of large number of model parameters and low segmentation accuracy when Con-volutional Neural Network performs semantic segmentation in RGB-D images. Based on RefineNet, the network model was lightened by Depthwise Separable Convolution. In addition, an efficient channel attention mechanism was applied to the encoding network and the decoding network. Firstly, the features of RGB image and depth image were extracted by the encoder network with channel attention mechanism. Secondly, the two features were fused in multiple dimensions by the fusion module. Finally, the segmentation results were obtained by the lightweight decoder network and compared with the segmentation results of 6 networks such as RefineNet. The proposed algorithm was tested on public datasets com-monly used in semantic segmentation networks. The experimental results showed that the parameters of the proposed network model were only 90.41 MB, and the mIoU was 1.7% higher than that of RefineNet network, reaching 45.3%. The experimental results show that the proposed network can improve the precision of semantic segmentation even when the number of parameters is greatly reduced.KEY WORDS:RGB-D images; semantic segmentation; depthwise separable convolution; channel attention mechanism. All Rights Reserved.第43卷第3期孙刘杰等:基于注意力机制的轻量级RGB-D图像语义分割网络·265·图像语义分割是计算机视觉的一项基本任务,已经得到了广泛的研究,其目的是为图像中的每个像素都分配一个语义标签,使图像上的不同种类的物体被区分开来。
基于深度学习的RGB-D深度信息补全方法研究
基于深度学习的RGB-D深度信息补全方法研究
李健;杨祥如;何斌
【期刊名称】《河南科技学院学报:自然科学版》
【年(卷),期】2018(046)006
【摘要】目前的深度相机往往不能感知高光、透明和较远距离的深度信息,导致原始获得的深度图像存在一定的信息丢失.为了解决这个问题,采用了一种基于深度学习的方法,从大量彩色图像中训练出能够估计局部法向和遮挡边界的模型,并结合深度相机提供的原始深度信息,通过构造全局优化函数,实现对原始深度的补全.通过对多视角的RGB-D数据集进行实验对比,方法较好地估计出整体轮廓和局部细节的深度,解决了原始深度信息缺失的问题.
【总页数】8页(P35-42)
【作者】李健;杨祥如;何斌
【作者单位】[1]陕西科技大学电气与信息工程学院,陕西西安710021;[1]陕西科技大学电气与信息工程学院,陕西西安710021;[2]同济大学电气与信息工程学院,上海201804
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于深度学习的RGB-D物体识别算法 [J], 卢良锋;何加铭;谢志军;孙德超
2.基于多模态深度学习的RGB-D物体识别 [J], 骆健;蒋旻;刘星;周龙
3.基于深度学习的RGB-D深度信息补全方法研究 [J],
4.基于RGB-D与深度学习的行为识别算法 [J], 刘云;张永;王传旭;李辉
5.基于K-Means聚类与深度学习的RGB-D SLAM算法 [J], 张晨阳;黄腾;吴壮壮因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于深度学习和迁移学习联合的RGB-D语义分割模型研究
近年来,无人机、无人车、智能机器人等领域飞速发展,逐步成为国家经济发展、社会民生改善的下一个高科技产业链,更加精准的环境语义信息成为这些智能体进行自主避障导航、智能路径规划等任务的必要前提。
然而在复杂室内场景下,由于光照不均匀、遮挡关系复杂、色彩纹理重复性高等干扰因素,基于RGB彩色图像的语义分割的方法存在物体边缘误分割、类别误分类等问题,无法实现智能体对环境语义信息的精确理解。
联合RGB彩色图像和Depth深度图像的语义分割方法能够利用深度图像中所包含的空间三维信息,该信息受光照影响小,同时反映出物体之间的位置关系,最终实现更高精度的室内场景语义分割效果。
本文深入研究了RGB-D语义分割领域,开展了理论研究创新和应用实践,主要研究成果与创新包括:1.针对现有RGB 语义分割模型在复杂室内场景下分割精度低的问题,本文提出了一种融合深度信息的RGB-D语义分割网络。
通过可视化两种模态下网络提取出的特征图谱,本文探讨分析了深度图像与RGB彩色图像的融合位置与融合方法,并在融合-分支结构的基础上,创新性地提出了一种特征筛选结构。
该结构使用一组可学习的特征惩罚因子,对融合之后的RGB-D特征进行加权处理,完成特征的筛选过程。
经过实验证明,本文提出的融合结构与特征筛选结构在RGB-D语义分割任务中,区域交占比精度最高提升5.7%。
2.针对深度图像中存在的深度空洞(无效值与缺失值)问题,本文提出了一种基于快速进行法的深度修复算法。
该算法利用RGB彩色图像中像素之间的相关性,为深度图像中对应像素点
估计深度值。
该算法充分考虑了深度空洞区域与RGB图像的对应关系,针对性地优化深度值估计函数,并修改了参考像素点的加权函数,使
得最终的深度图修复结果能够获取更加锐利精确的边缘。
经过实验证明,使用修复后的深度图,RGB-D语义分割模型的区域交占比精度提升2.1%。
3.本文发现,将训练好的RGB-D模型应用在实际场景中,模型仍存在误分割与误分类现象,该问题是由训练数据集与实际场景数据存在较大差别导致。
针对此问题,本文提出了一种联合迁移学习的RGB-D 语义分割网络。
该网络在上述RGB-D语义分割模型中进一步引入了自适应层,在模型的损失函数中加入了最大均值差异优化项,通过不断
优化训练数据集与实际场景数据集的特征在高维空间中的数据分布
差异,使得模型在无监督的小数据集上取得更好的分割效果。
本文采集部分实验室环境数据,构建了一个小规模语义分割数据集,并在该
数据集上进行应用实验,实验结果表明,联合迁移学习的语义分割模
型在实际场景数据集上,区域交占比精度提升了1.4%。