上位机下位机串口通信
上位机工作原理

上位机工作原理标题:上位机工作原理引言概述:上位机是指与下位机相对应的一种计算机系统,用于对下位机进行控制和监控。
上位机工作原理是指上位机如何与下位机进行通信和数据交换,实现对下位机的控制和监控。
本文将从上位机工作原理的角度进行详细阐述。
一、通信协议1.1 串口通信:上位机通过串口与下位机进行通信,常用的串口通信协议有RS232、RS485等。
1.2 网络通信:上位机通过网络与下位机进行通信,常用的网络通信协议有TCP/IP、UDP等。
1.3 无线通信:上位机通过无线通信模块与下位机进行通信,常用的无线通信协议有WiFi、蓝牙等。
二、数据采集2.1 传感器数据采集:上位机通过传感器获取下位机环境数据,包括温度、湿度、压力等。
2.2 控制器数据采集:上位机通过控制器获取下位机设备状态数据,包括开关状态、电流、电压等。
2.3 数据处理:上位机对采集到的数据进行处理,包括数据解析、校验、存储等操作。
三、控制指令3.1 控制指令生成:根据上位机对下位机的控制需求,生成相应的控制指令。
3.2 指令传输:将生成的控制指令通过通信协议传输给下位机。
3.3 指令执行:下位机接收到控制指令后执行相应的操作,包括设备开关、参数调整等。
四、用户界面4.1 设计界面:上位机通过用户界面与操作人员进行交互,设计直观、易用的界面。
4.2 实时显示:界面实时显示下位机数据,包括实时监控数据、报警信息等。
4.3 操作控制:操作人员可以通过界面发送控制指令,实现对下位机的控制。
五、系统集成5.1 上下位机协同:上位机与下位机协同工作,实现数据交换、控制指令传输等功能。
5.2 系统稳定性:上位机与下位机系统稳定性是系统集成的重要考量因素,需要进行充分测试和验证。
5.3 系统升级:随着技术的发展,系统需要不断升级,上位机工作原理需要不断优化和改进。
结语:通过本文对上位机工作原理的详细阐述,可以更好地理解上位机与下位机之间的通信和数据交换过程,为工业控制系统的设计和应用提供参考。
上位机工作原理

上位机工作原理一、概述上位机是指与下位机(如传感器、执行器等)进行通信并控制其工作的计算机设备。
它通过与下位机建立通信连接,接收下位机传输的数据,并根据需要发送指令给下位机。
本文将详细介绍上位机的工作原理。
二、上位机与下位机通信方式1. 串口通信:上位机与下位机通过串口进行数据传输。
串口通信常用的标准有RS232、RS485等。
上位机通过串口接收下位机发送的数据,解析后进行处理并显示。
2. 以太网通信:上位机与下位机通过以太网进行数据传输。
上位机通过网络接口接收下位机发送的数据,解析后进行处理并显示。
以太网通信速度快,适用于需要大量数据传输的场景。
3. USB通信:上位机与下位机通过USB接口进行数据传输。
上位机通过USB接口接收下位机发送的数据,解析后进行处理并显示。
USB通信方便快捷,适用于小型设备的通信。
三、上位机工作流程1. 建立通信连接:上位机首先与下位机建立通信连接,根据通信方式选择相应的接口和协议。
通常需要配置通信参数,如波特率、数据位、停止位等。
2. 数据接收与解析:上位机接收下位机发送的数据,根据协议对数据进行解析。
解析后的数据可以是传感器采集的实时数据、执行器的状态信息等。
3. 数据处理与显示:上位机根据接收到的数据进行处理,可以进行数据分析、计算、存储等操作。
处理后的数据可以通过图表、表格等形式显示出来,方便用户进行分析和监控。
4. 指令发送:上位机根据需要向下位机发送指令,控制其工作。
指令可以是控制命令、参数设置等。
上位机发送指令后,下位机执行相应的操作。
5. 异常处理:上位机需要对通信过程中可能出现的异常进行处理。
例如,通信中断、数据丢失等情况需要及时处理,保证通信的稳定性和可靠性。
四、上位机应用领域1. 工业自动化:上位机广泛应用于工业自动化领域,如生产线控制、设备监控等。
上位机可以实时监测设备状态、采集数据,并根据需要进行控制和调整。
2. 智能家居:上位机可以与智能家居设备(如智能灯、智能插座等)进行通信,实现对家居设备的远程控制和监控。
上位机工作原理
上位机工作原理引言概述:上位机是指与下位机(如传感器、执行器等)进行通信,并对其进行控制和监测的计算机系统。
它在现代工业自动化中起到了至关重要的作用。
本文将详细介绍上位机的工作原理,包括通信方式、数据处理、控制策略等五个方面。
一、通信方式1.1 串口通信:上位机与下位机通过串口进行数据传输,常用的串口通信协议有RS232、RS485等。
上位机通过串口发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过串口返回给上位机。
1.2 以太网通信:上位机与下位机通过以太网进行数据传输,常用的以太网通信协议有TCP/IP、UDP等。
上位机通过以太网发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过以太网返回给上位机。
1.3 无线通信:上位机与下位机通过无线方式进行数据传输,常用的无线通信方式有Wi-Fi、蓝牙等。
上位机通过无线方式发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过无线方式返回给上位机。
二、数据处理2.1 数据采集:上位机通过与下位机通信,获取下位机传感器采集到的数据。
上位机根据通信协议解析下位机发送的数据,并进行数据格式转换,以便后续的数据处理和分析。
2.2 数据存储:上位机将采集到的数据存储在数据库或者文件中,以便后续的数据查询和分析。
上位机可以根据需要设置数据存储的周期和容量,以满足实际应用的需求。
2.3 数据分析:上位机对采集到的数据进行处理和分析,可以通过数据挖掘、统计分析等方法提取数据中的有价值信息。
上位机可以根据分析结果制定相应的控制策略,实现对下位机的精确控制。
三、控制策略3.1 开环控制:上位机根据预先设定的控制策略,发送相应的指令给下位机,下位机执行指令完成相应的任务。
上位机无法实时获得下位机执行结果,控制过程中无法对下位机的状态进行实时调整。
3.2 闭环控制:上位机根据下位机传感器采集到的实时数据,通过反馈控制算法计算出相应的控制指令,发送给下位机。
07基于PROTEUS的上、下位机串口通讯仿真技术

8.马忠梅单片机C语言应用程序设计2003
其它相关资料
课 程 设 计 任 务 书
5.本课程设计课题工作进度计划:
起迄日期
工作内容
2013年
06月17日~06月17日
06月18日~06月20日
06月21日~06月25日
2、选择最佳的设计方案;
3、程序编写及调试。
4、撰写设计报告、调试报告、设计心得体会。
4.主要参考文献:
1.李军等.51系列单片机高级实例开发指南.北京航空航天大学出版社.2004.6.
2.路明,张海波.利用PC及RS_232串口实现远程数据采集[J].微计算机信息,2011,27(2):107-108.
06月26日~06月29日
06月30日
下达任务书,任务布置及设计要求说明
查阅材料,方案设计;
完成设计初稿
仿真、调试
答辩、成绩考核
教研室主任审查意见:
负责人签字:
年月日
③应用软件文档的建立,包括程序设计思路,程序主要完成的功能,操作方法及优缺点说明;
3)实现程序调试及PROTUES软件平台下的系统仿真;
4) 撰写课程设计的总结报告。
课 程 设 计 任 务 书
3.对本课程设计工作任务及工作量的要求〔包括课程设计计算说明书(论文)、图纸、实物样品等〕:
1、熟悉、分解设计任务,查找资料熟悉相关设计的方法;
3.赵巧妮.Proteus在单片机仿真中的应用[J].自动化技术与应用,2009,28(6):113-114+129.
4.赫建国等.单片机在电子电路设计中的应用[M].清华大学出版社. 2005..
C#做一个简单的进行串口通信的上位机

C#做一个简单的进行串口通信的上位机1、上位机与下位机上位机相当于一个软件系统,可以用于接收数据、控制数据。
即可以对接收到的数据直接发送操控命令来操作数据。
上位机可以接收下位机的信号。
下位机是一个控制器,是直接控制设备获取设备状况的计算机。
上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。
下位机不时读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。
上位机不可以单独使用,而下位机可以单独使用。
2、串口通信串口相当于硬件类型的接口。
比如无线传感节点发送信号到汇聚节点,汇聚节点通过串口将数据传到计算机中的上位机中,上位机接收信息,并处理。
串口是按位(bit)发送和接收字节。
串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。
对于两个进行通信的端口,这些参数必须匹配。
a,波特率:这是一个衡量符号传输速率的参数。
b,数据位:这是衡量通信中实际数据位的参数。
c,停止位:用于表示单个包的最后一位。
典型的值为1,1.5和2位。
d,奇偶校验位:在串口通信中一种简单的检错方式。
3、C#代码[c#] view plain copying System;ing System.Collections.Generic;ing ponentModel;ing System.Data;ing System.Drawing;ing System.Linq;ing System.Text;ing System.Threading.Tasks;ing System.Windows.Forms;ing System.IO.Ports;ing System.Diagnostics;space serial213.{14.public partial class Form1 : Form15.{16.SerialPort s = new SerialPort(); //实例化一个串口对象,在前端控件中可以直接拖过来,但最好是在后端代码中写代码,这样复制到其他地方不会出错。
上位机工作原理

上位机工作原理上位机是指与下位机(例如控制器、传感器等)进行通信的计算机系统,它负责控制、监测和管理下位机的工作。
下面将详细介绍上位机的工作原理。
1. 上位机的基本原理上位机通过与下位机建立通信连接,实现数据的传输和控制指令的发送。
通常,上位机通过串口、以太网、USB等接口与下位机进行通信。
上位机通过读取下位机发送的数据,对其进行处理和分析,并向下位机发送控制指令,实现对下位机的控制。
2. 上位机与下位机的通信协议上位机与下位机之间的通信需要遵循一定的通信协议。
常用的通信协议有Modbus、CAN、RS-232等。
通信协议规定了数据的传输格式、通信速率、校验方法等。
上位机需要根据通信协议的要求进行数据的解析和封装,以确保通信的正确性和稳定性。
3. 上位机的数据处理与分析上位机接收到下位机发送的数据后,需要对数据进行处理和分析。
这包括数据的解析、数据的存储和数据的显示等。
上位机通常会将接收到的数据存储到数据库中,以便后续的数据分析和查询。
同时,上位机还可以对数据进行实时的显示和监测,以便操作人员及时了解系统的工作状态。
4. 上位机的控制指令发送上位机不仅可以接收下位机发送的数据,还可以向下位机发送控制指令,实现对下位机的控制。
上位机根据系统的需求和逻辑,生成相应的控制指令,并通过通信协议将指令发送给下位机。
下位机接收到控制指令后,根据指令进行相应的操作,例如启动、停止、调节参数等。
5. 上位机的人机界面上位机通常需要提供一个人机界面,以便操作人员与系统进行交互。
人机界面可以是一个图形界面,也可以是一个文本界面。
通过人机界面,操作人员可以实时监测系统的工作状态、查看历史数据、调整系统参数等。
上位机的人机界面需要具备友好的用户体验和良好的操作性能,以方便操作人员的使用。
总结:上位机作为与下位机通信的计算机系统,通过与下位机建立通信连接,实现数据的传输和控制指令的发送。
上位机需要遵循通信协议进行数据的解析和封装,对接收到的数据进行处理和分析,并向下位机发送控制指令。
上位机与下位机串口通信协议

上位机与下位机串口通信协议篇一:基于C#的串口通信上位机和下位机源程序基于单片机串口通信的上位机和下位机实践串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal Serial Bus或者USB混淆)。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
它很简单并且能够实现远距离通信。
比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。
首先亮出C#的源程序吧。
1主要界面:只是作为简单的运用,可以扩展的。
源代码:using System;using System.Collections.Generic;using ponentModel;using System.Data;using System.Drawing;using System.Text;using System.Windows.Forms;using System.IO.Ports;using System.Timers;namespace 单片机功能控制{public partial class Form1 : Form{public Form1(){InitializeComponent();}SerialPort sp = new SerialPort();private void button1_Click(object sender, EventArgs e) 2{String str1 = comboBox1.Text;//串口号String str2 = comboBox2.Text;//波特率String str3 = comboBox3.Text;//校验位String str4 = comboBox5.Text;//停止位String str5 = comboBox4.Text;//数据位Int32 int2 = Convert.ToInt32(str2);//将字符串转为整型Int32 int5 = Convert.ToInt32(str5);//将字符串转为整型groupBox3.Enabled = true;//LED控制界面变可选try{if (button1.Text == 打开串口){if (str1 == null){MessageBox.Show(请先选择串口~, Error); return; }sp.Close();sp = new SerialPort();sp.PortName = comboBox1.Text;//串口编号sp.BaudRate = int2;//波特率switch (str4)//停止位3{case 1:sp.StopBits = StopBits.One;break;case 1.5:sp.StopBits = StopBits.OnePointFive;break;case 2:sp.StopBits = StopBits.Two;break;default:MessageBox.Show(Error:参数不正确, Error); break;}switch (str3){case NONE:sp.Parity = Parity.None; break;case ODD:sp.Parity = Parity.Odd; break;case EVEN:sp.Parity = Parity.Even; break;default:4MessageBox.Show(Error:参数不正确, Error); break;}sp.DataBits = int5;//数据位sp.Parity = Parity.Even;//设置串口属性sp.Open();//打开串口button1.Text = 关闭串口;textBox1.Text = Convert.ToString(sp.PortName) + 已开启~; }else{sp.Close();button1.Text = 打开串口;groupBox3.Enabled = false;//LED控制界面变灰色textBox1.Text = Convert.ToString(sp.PortName) + 已关闭~; } }catch (Exception er){MessageBox.Show(Error: + er.Message, Error);return;}5}private void Form1_Load(object sender, EventArgs e){//初始化textBox1.Text = 欢迎使用简易的串口助手~;groupBox3.Enabled = false;//LED控制界面变灰色groupBox6.Enabled = false;groupBox7.Enabled = false;groupBox8.Enabled = false;button3.Enabled = false;button6.Enabled = false;timer1.Start();try{foreach (string com in System.IO.Ports.SerialPort.GetPortNames()) 获取串行口名称boBox1.Items.Add(com);//默认设置comboBox1.SelectedIndex = 0;//选择第一个com口comboBox2.SelectedIndex = 4;//波特率4800comboBox3.SelectedIndex = 0;//校验位NONE6comboBox4.SelectedIndex = 0;//停止位为1comboBox5.SelectedIndex = 0;//数据位为8}catch{MessageBox.Show(找不到通讯端口~, 串口调试助手); }}private void timer1_Tick(object sender, EventArgs e){label6.Text = DateTime.Now.ToString();}private void button2_Click(object sender, EventArgs e){try {if (button2.Text == 开启){groupBox6.Enabled = true; radioButton1.Checked = false; radioButton2.Checked = false; radioButton3.Checked = false; radioButton4.Checked = false; checkBox1.Checked = false;7checkBox2.Checked = false; //自动checkBox3.Checked = false; checkBox4.Checked = false; checkBox5.Checked = false; checkBox6.Checked = false; checkBox7.Checked = false; checkBox8.Checked = false; button3.Enabled = true;textBox2.Text = String.Empty; button2.Text = 关闭;}else{groupBox6.Enabled = false; button3.Enabled = false;button2.Text = 开启;textBox2.Text = String.Empty;}}catch (Exception er){MessageBox.Show(Error: + er.Message, Error); return;8}}private void button3_Click(object sender, EventArgs e) {groupBox6.Enabled = true;label7.Text = 已发送;if (textBox2.Text == )MessageBox.Show(发送失败,请选择发送的数据~); else sp.WriteLine(textBox2.Text);//往串口写数据}private void checkBox1_CheckedChanged(object sender, EventArgs e){try {if (checkBox1.Checked){checkBox1.Checked = true;checkBox2.Checked = false;篇二:上位机与下位机之间的连接第一章上位机与下位机1.1 上位机与下位机的概念上位机和下位机,一般是指集中控制系统中的PC机和现场的工控机。
上位机、下位机通信实例
上位机、下位机通信实例摘要:1.上位机与下位机通信的基本概念2.上位机与下位机通信的方式3.通信实例介绍4.通信实例的应用场景5.通信实例的优势与不足正文:一、上位机与下位机通信的基本概念上位机和下位机通信是指在计算机控制系统中,上位机(通常为控制中心或主计算机)与下位机(通常为现场控制器或执行器)之间的信息交换。
上位机主要负责数据处理、逻辑控制和决策等任务,而下位机则主要负责现场设备的运行控制。
两者之间的通信是实现自动化控制系统正常运行的关键。
二、上位机与下位机通信的方式上位机与下位机之间的通信方式主要有串行通信、并行通信和网络通信等。
其中,串行通信和并行通信是硬件层面的通信方式,而网络通信则是基于计算机网络的通信方式。
1.串行通信:串行通信是指上位机与下位机之间通过串行接口进行数据传输。
它具有线路简单、成本低的优点,但传输速率相对较低。
2.并行通信:并行通信是指上位机与下位机之间通过并行接口进行数据传输。
它具有传输速率快的优点,但需要较多的线路和硬件资源。
3.网络通信:网络通信是指上位机与下位机之间通过网络进行数据传输。
它可以实现远程控制和实时数据交互,但需要建立稳定的网络环境和较高的网络带宽。
三、通信实例介绍以下是一个典型的上位机与下位机通信实例:假设有一个自动化生产线系统,上位机负责生产任务的分配和调度,下位机负责具体的设备运行控制。
在这个系统中,上位机需要实时获取下位机的运行状态和数据,并根据生产任务进行调整。
同时,下位机也需要根据上位机的指令来执行相应的操作。
四、通信实例的应用场景上位机与下位机通信实例在许多领域都有应用,如工业自动化、楼宇自控、智能交通等。
在这些领域中,上位机与下位机通信实例可以实现设备的远程监控、实时数据采集和智能决策等功能,从而提高系统的运行效率和可靠性。
五、通信实例的优势与不足上位机与下位机通信实例具有以下优势:1.提高系统的自动化水平,降低人工干预成本。
2.实现远程监控和控制,方便管理人员进行决策。
上下位机通信方法
上下位机通信方法
上下位机通信是指在自动化控制系统中,上位机和下位机之间进行数据交换和通信的方式和方法。
常见的上下位机通信方法有以下几种:
1. 串口通信:使用串行通信接口(如RS232、RS485等)实现上下位机之间的数据传输。
这种通信方法简单易实现,但传输速度相对较慢。
2. 网口通信:利用以太网接口进行通信,可以使用TCP/IP协议或UDP协议进行数据传输。
网口通信速度较快,适用于大数据量或实时性要求较高的场景。
3. USB通信:通过USB接口进行数据传输和通信。
USB通信的优点是便携性强,适用于移动设备或一体机等场景。
4. 无线通信:利用无线模块(如蓝牙、Wi-Fi、ZigBee等)实现上下位机之间的通信。
无线通信可以实现远程控制和监测,但受环境影响较大,通信稳定性相对较差。
5. CAN总线通信:针对工控领域的通信协议,主要用于机器人、工业自动化等领域。
CAN总线通信速度快,可实现多节点通信,适用于复杂系统中的设备间通信。
6. MQTT通信:一种轻量级的消息发布/订阅协议,适用于物联网设备之间的通信。
MQTT通信具有低带宽和开销、可靠
性强、支持海量设备等优点。
在实际应用中,选择哪种上下位机通信方法,需要根据具体的应用场景和要求进行选择和配置。
c#通过串口及CAN模块实现上位及下位机通讯
c#通过串⼝及CAN模块实现上位及下位机通讯⽬录前⾔⼀、串⼝、CAN总线⼆、使⽤步骤1.RS232串⼝通讯(指令下发与接收)2.CAN总线通讯总结前⾔学习及⼯作中我们经常会遇到上位机与下位机通讯等⼯作,结合场景使⽤不同的通讯⽅式实时通讯,以下为⼯作中遇到的上位机与下位机进⾏实时通讯,采⽤RS232串⼝和CAN总线形式进⾏⽹络通讯。
⼀、串⼝、CAN总线串⾏接⼝简称串⼝,也称串⾏通讯接⼝或串⾏通讯接⼝(通常指设备的COM接⼝),是采⽤串⾏通信⽅式的扩展接⼝。
串⾏接⼝(Serial Interface)是指数据⼀位⼀位地顺序传送。
其特点是通讯简单,只要⼀对传输线,通过设备设置传输线端⼝等参数就可以实现双向通信,从⽽⼤⼤降低了成本,特别适⽤于远距离通信,但传送速度较慢。
CAN是控制器局域⽹络(Controller Area Network, CAN)的简称,是由以研发和⽣产汽车电⼦产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应⽤最⼴泛的现场总线之⼀。
在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌⼊式⼯业控制局域⽹的标准总线,并且拥有以CAN为底层协议专为⼤型货车和重⼯机械车辆设计的J1939协议。
上位机与与下位机制定好通⽤协议通过CAN模块将数据进⾏16进制转换实时通讯。
⼆、使⽤步骤1.RS232串⼝通讯(指令下发与接收)代码如下(⽰例)://命名空间引⼊using System.IO.Ports;public SerialPort serialPort;//定义串⼝对象类public//定义连接⽅法public void Connect(){serialPort = new SerialPort();serialPort.BaudRate = 1200;//波特率serialPort.PortName = "COM1";serialPort.Parity = Parity.None;//校验法:⽆serialPort.DataBits = 8;//数据位:8serialPort.StopBits = StopBits.One;//停⽌位:1try{serialPort.Open();//打开串⼝serialPort.DtrEnable = true;//设置DTR为⾼电平serialPort.RtsEnable = true;//设置RTS位⾼电平serialPort.DataReceived += new SerialDataReceivedEventHandler(serialPort_DataReceived);//DataReceived事件委托byte[] WriteBuffer = Encoding.ASCII.GetBytes("下发指令");//下发serialPort.Write(WriteBuffer, 0, WriteBuffer.Length);}catch (Exception ex){//打开串⼝出错,显⽰错误信息Console.WriteLine("串⼝打开失败");}}2.CAN总线通讯代码如下(⽰例)://⾸先与CAN模块进⾏连接public TcpClient mTcp = new TcpClient();private const int READ_BUFFER_SIZE = 1000;private byte[] readBuffer = new byte[READ_BUFFER_SIZE + 1];public delegate void DoReadEventHandle(object sender, string e);public event DoReadEventHandle ReadedEvent;public event DoReadEventHandle LogEvent;public string recStr { get; set; }public string HandString { get; set; }public bool Connect(){//Can模块ipstring mIPAddress = "192.168.1.1";IPAddress hostIPAddress = IPAddress.Parse(mIPAddress);//端⼝int mPort = 8080;IPEndPoint endIP = new IPEndPoint(hostIPAddress, mPort);try{mTcp = new TcpClient(mIPAddress, mPort);DateTime Savetime = DateTime.Now;TimeSpan n = new TimeSpan();while (true){n = DateTime.Now - Savetime;if (n.TotalMilliseconds > 1000 || mTcp.Client.Connected) break;}if (!mTcp.Client.Connected) return false;mTcp.GetStream().BeginRead(readBuffer, 0, READ_BUFFER_SIZE, DoRead, null);}catch (Exception){return false;}return true;}private void DoRead(IAsyncResult ar){try{int BytesRead = mTcp.GetStream().EndRead(ar);if (BytesRead > 0){string s = "";for (int i = 0; i <= BytesRead - 1; i++){s = s + string.Format("{0:x2}", readBuffer[i]) + " ";}Console.WriteLine(s);var t = s.Split(new string[] { "aa 00 ff 00 00 00 00 00 00 00 00 00 55" }, StringSplitOptions.RemoveEmptyEntries).FirstOrDefault(ex => ex != " ");if (!string.IsNullOrEmpty(t)){recStr += t + "\r\n";if (HandString == recStr && LogEvent != null){HandString = null;LogEvent(this, "握⼿成功!");}} mTcp.GetStream().BeginRead(readBuffer, 0, READ_BUFFER_SIZE, DoRead, null);}}catch (Exception e){mTcp.Client.Close();}}//数据发送public void sendCan(string temperature, bool check){HandString = "0xC0 0x02 0x02 0x00 0x00";string[] tmp = temperature.Split(' ');var buf = new byte[22];for (int i = 0; i < buf.Length; i++){buf[i] = 0;}for (int i = 0; i < tmp.Length; i++){try{buf[i] = Convert.ToByte(tmp[i], 16);}catch (Exception e){buf[i] = 0;}}SendData(buf, 0, 13, check);}public bool SendData(byte[] sendBytes, int mStart, int mLen, bool check = true) {if (!check) return false;try{lock (mTcp.GetStream()){mTcp.GetStream().Write(sendBytes, mStart, mLen);}return true;}catch (Exception x){return false;}}总结1、RS232串⼝通讯接⼝的信号电平值较⾼,易损坏接⼝电路的芯⽚,传输速率较低,传输距离有限。
上位机工作原理

上位机工作原理概述:上位机是指与下位机进行通信的计算机或者设备,它通过与下位机进行数据交互和控制来实现对下位机的监控和操作。
本文将详细介绍上位机的工作原理,包括通信方式、数据传输、数据处理和控制等方面。
一、通信方式:上位机与下位机之间的通信可以通过多种方式实现,常见的通信方式包括串口通信、以太网通信和无线通信等。
1. 串口通信:串口通信是一种通过串行接口进行数据传输的通信方式,常见的串口包括RS232、RS485等。
上位机通过串口与下位机建立连接,通过发送和接收串口数据来实现通信。
2. 以太网通信:以太网通信是一种通过以太网接口进行数据传输的通信方式,上位机和下位机通过局域网或者互联网连接,通过发送和接收网络数据包来实现通信。
3. 无线通信:无线通信是一种通过无线信号进行数据传输的通信方式,常见的无线通信方式包括Wi-Fi、蓝牙、ZigBee等。
上位机和下位机通过无线信号进行数据传输和通信。
二、数据传输:上位机与下位机之间的数据传输可以通过不同的协议和数据格式实现,常见的数据传输方式包括ASCII码传输、二进制传输和协议传输等。
1. ASCII码传输:ASCII码传输是一种将数据以ASCII码的形式进行传输的方式,上位机将需要传输的数据转换为ASCII码后发送给下位机,下位机接收到数据后再将ASCII码转换为相应的数据。
2. 二进制传输:二进制传输是一种将数据以二进制的形式进行传输的方式,上位机将需要传输的数据转换为二进制形式后发送给下位机,下位机接收到数据后再将二进制数据转换为相应的数据。
3. 协议传输:协议传输是一种按照特定的协议进行数据传输的方式,常见的协议包括Modbus、CAN、TCP/IP等。
上位机和下位机之间事先约定好使用的协议,按照协议规定的格式进行数据传输。
三、数据处理:上位机接收到下位机发送的数据后,需要进行相应的数据处理和解析,以获取实用的信息。
1. 数据解析:上位机根据事先约定好的数据格式和协议对接收到的数据进行解析,将数据转换为可读取和可处理的格式,以便进行后续的数据处理操作。
上位机工作原理

上位机工作原理一、概述上位机是指与下位机进行通信和控制的计算机设备,它通常是一个PC或者嵌入式系统,用于监控、控制和管理下位机设备。
上位机工作原理是指上位机与下位机之间的通信方式和数据交互过程。
本文将详细介绍上位机工作原理的基本原理、通信方式和数据交互过程。
二、基本原理上位机工作原理的基本原理是通过通信协议实现上位机与下位机之间的数据交互。
通常情况下,上位机通过串口、以太网、USB等通信接口与下位机进行连接。
下位机负责采集、处理和控制设备,将采集到的数据通过通信接口发送给上位机。
上位机接收到数据后,进行数据处理、分析和显示,并可以通过控制命令发送给下位机实现对设备的控制。
三、通信方式上位机与下位机之间的通信方式有多种,常见的有串口通信、以太网通信和USB通信。
1. 串口通信串口通信是上位机与下位机之间最常用的通信方式之一。
它通过串口接口(如RS232、RS485等)实现数据的传输。
上位机通过串口发送控制命令给下位机,下位机通过串口将采集到的数据发送给上位机。
串口通信具有简单、稳定的特点,适合于距离较近、数据量较小的应用场景。
2. 以太网通信以太网通信是利用以太网接口实现上位机与下位机之间的数据交互。
上位机和下位机通过以太网连接,可以实现远程监控和控制。
以太网通信具有传输速度快、传输距离远的优点,适合于数据量较大、实时性要求较高的应用场景。
3. USB通信USB通信是通过USB接口实现上位机与下位机之间的数据传输。
上位机通过USB接口与下位机连接,可以实现高速数据传输和设备控制。
USB通信具有插拔方便、传输速度快的特点,适合于小型设备和个人电脑之间的数据交互。
四、数据交互过程上位机与下位机之间的数据交互过程包括数据发送和数据接收两个过程。
1. 数据发送上位机发送数据给下位机的过程称为数据发送。
上位机通过通信接口将控制命令发送给下位机,下位机接收到命令后执行相应的操作。
上位机发送的数据可以是控制命令、参数设置等。
上位机、下位机通信实例

上位机、下位机通信实例一、引言随着科技的不断发展,自动化控制系统逐渐成为各个行业的重要组成部分。
上位机与下位机的通信作为自动化控制系统的核心环节,越来越受到广泛关注。
本文将介绍上位机与下位机通信的实例,以帮助读者更好地理解这一领域的知识。
二、上位机与下位机的通信原理1.串口通信串口通信是一种通过串行数据传输线实现数据交换的方式。
它具有传输速率较低、传输距离较短、抗干扰能力较弱等特点。
尽管如此,串口通信在许多场景下仍具有广泛的应用。
2.以太网通信以太网通信是一种基于计算机局域网技术的通信方式。
相较于串口通信,以太网通信具有传输速率快、传输距离远、抗干扰能力强等优点。
因此,在需要高速、远距离通信的场合,以太网通信成为首选。
3.其他通信方式除了串口通信和以太网通信,上位机与下位机之间还可以采用其他通信方式,如无线通信、CAN总线等。
这些通信方式各有优缺点,适用于不同的应用场景。
三、通信实例详解1.串口通信实例(1)硬件连接上位机与下位机通过串行通信线(如RS-232)进行连接。
通常,下位机配备有串口通信模块,而上位机则需要安装相应的串口通信转换器。
(2)通信协议为了实现数据的一致性和完整性,上位机与下位机之间需要遵循一定的通信协议。
常见的通信协议有MODBUS、PROFIBUS、CAN等。
(3)编程实现在上位机和下位机上分别编写相应的程序,实现数据的发送和接收。
编程语言可以选择C、C++、Python等。
2.以太网通信实例(1)硬件连接上位机与下位机通过以太网线进行连接。
下位机需要具备以太网通信模块,上位机则需配置以太网接口。
(2)通信协议以太网通信通常采用TCP/IP协议。
上位机与下位机之间通过以太网协议进行数据交换。
(3)编程实现在上位机和下位机上分别编写相应的程序,实现数据的发送和接收。
编程语言可以选择C、C++、Python等。
四、上位机与下位机通信的优缺点1.优点上位机与下位机通信具有以下优点:- 传输速率快、传输距离远;- 抗干扰能力强;- 易于扩展和维护;- 通信协议成熟,易于实现。
上位机与下位机之间的连接

上位机与下位机之间的连接上位机与下位机是计算机控制系统中的两个重要组成部分,它们之间的连接至关重要。
本文将介绍上位机与下位机之间的连接方式、连接原理以及一些实际应用场景。
上位机和下位机的定义在控制系统中,上位机是指控制计算机,一般是一个普通的计算机或工作站,它负责控制和监控整个控制系统。
上位机通常运行着上位机软件,通过与下位机通信,控制系统可以实现各种各样的功能。
下位机是指被控制的目标设备,它可能是一些工业控制设备,如传感器、电机控制器等,并且运行着下位机软件。
下位机一般被设计成嵌入式系统,具有高度可靠性和性能,以满足各种不同的控制需求。
上位机与下位机之间的连接方式上位机和下位机之间的连接一般有以下几种方式:串口连接在上位机和下位机之间,最常见的连接方式是串口连接。
串口连接最常用的是RS232串口和RS485串口。
通过串口连接,可以实现上位机对下位机的控制和数据传输。
使用串口连接时,需要考虑串口的通信协议,包括波特率、数据位、校验位和停止位等。
这些参数需要在上位机软件和下位机软件中进行匹配,才能确保正常通信。
USB连接USB连接是另一种常见的上位机和下位机的连接方式。
USB连接的优点是可以支持高速数据传输,并且可以提供更加稳定和可靠的连接。
通过USB连接,上位机可以控制下位机,并传输大量的数据。
在实际应用中,往往需要购买专门的USB转串口转换器,将USB信号转换为串口信号,以便将其连接到下位机。
以太网连接以太网连接是一种支持高速数据传输的上位机和下位机的连接方式。
通过以太网连接,上位机可以直接访问下位机,并进行控制和数据传输。
使用以太网连接时,需要进行IP地址的配置,确保上位机和下位机可以进行正常通信。
上位机与下位机之间的连接原理无论使用什么样的连接方式,上位机和下位机之间的连接原理是相似的。
连接通常包括两个关键步骤:建立连接和数据传输。
建立连接通常需要进行通信协议的匹配,以确保上位机和下位机可以正常通信。
上位机和下位机通信
上位机和下位机通信
简介
在嵌入式系统中,我们经常需要将上位机和下位机进行通信。
上位机可以是
PC机、嵌入式开发板等,下位机可以是单片机、FPGA、DSP等。
本文将介绍上位
机和下位机通信的一般流程和具体实现方法。
通信流程
上位机和下位机之间的通信一般分为以下几个步骤:
1.建立连接:上位机通过串口、USB、以太网等方式建立与下位机的物
理连接。
2.协议定义:双方需要定义好通信协议,即数据格式和通信规则。
3.数据传输:上位机向下位机发送数据,下位机接收数据并进行处理,
然后向上位机返回数据。
4.断开连接:通信结束后,双方需要关闭物理连接。
具体的通信流程如下图所示:
graph LR
A(建立连接) --> B(协议定义)
B --> C(数据传输)
C --> D(断开连接)
常见的通信协议
在上位机和下位机之间通信时,需要定义好数据格式和通信规则,即通信协议。
常见的通信协议有以下几种:
1. ASCII码协议
ASCII码协议是一种文本协议,数据使用ASCII码表示,每个数据项使用特定
的分隔符分开。
这种协议实现简单,但数据量大,传输速度较慢。
常用于调试和测试。
例如,上位机向下位机发送。
上位机和硬件的基本通信原理
上位机和硬件的基本通信原理
上位机和硬件的基本通信原理如下:
1. 串口通信:上位机通过串口(如RS232串口、RS485串口)与硬件设备进行通信。
串口通信通过发送和接收串口数据帧进行通信。
上位机将数据封装为一个数据帧并通过串口发送给硬件设备,然后硬件设备将收到的数据进行解析并返回相应的响应数据。
2. 网络通信:上位机和硬件设备通过网络进行通信,常见的网络通信方式有以太网、Wi-Fi、蓝牙等。
在以太网通信中,上
位机和硬件设备之间通过IP地址进行通信。
上位机发送数据
封装成IP包,然后通过网络发送给目标硬件设备,在硬件设
备收到数据后进行解析并返回响应数据。
3. 总线通信:在一些工业控制系统中,上位机和硬件设备通过总线进行通信。
常见的总线通信协议有CAN总线、Modbus
总线等。
上位机通过总线发送命令及数据,硬件设备接收到后进行解析并返回相应的响应数据。
需要注意的是,不同的通信方式具有不同的通信协议和参数设置方式,上位机和硬件设备需要根据具体的通信方式进行通信的初始化和设置。
同时,上位机和硬件设备需要遵循相同的通信协议和数据封装规则,以确保通信的正确进行。
上位机工作原理
上位机工作原理引言概述:上位机是一种通过计算机等设备来控制和监测下位机的工作状态的系统。
它在工业自动化和控制系统中起着至关重要的作用。
本文将详细介绍上位机的工作原理,包括通信方式、数据处理、用户界面、实时监控和数据存储等五个方面。
正文内容:1. 通信方式1.1 串口通信:上位机通过串口与下位机进行通信,通过发送和接收数据来实现控制和监测功能。
1.2 以太网通信:上位机通过以太网与下位机进行通信,可以实现高速数据传输和实时监控功能。
1.3 无线通信:上位机通过无线通信方式(如Wi-Fi、蓝牙等)与下位机进行通信,实现无线控制和监测。
2. 数据处理2.1 数据采集:上位机通过传感器等设备采集下位机传来的数据,包括温度、湿度、压力等各种参数。
2.2 数据解析:上位机对采集到的数据进行解析,将其转化为可读取和处理的格式,以便后续的控制和监测操作。
2.3 数据分析:上位机对解析后的数据进行分析,包括数据的趋势分析、异常检测等,为用户提供决策依据。
3. 用户界面3.1 图形界面:上位机通过图形界面展示数据和控制界面,用户可以通过鼠标、键盘等输入设备进行操作。
3.2 控制面板:上位机提供控制面板,用户可以通过按钮、滑动条等进行控制操作,如开关设备、调节参数等。
3.3 报表和图表:上位机可以生成各种报表和图表,以直观地展示数据和趋势,帮助用户进行数据分析和决策。
4. 实时监控4.1 实时数据显示:上位机可以实时显示下位机传来的数据,用户可以随时监测设备的状态。
4.2 报警功能:上位机可以设置报警条件,当设备状态异常时,及时提醒用户,并采取相应的措施。
4.3 远程监控:上位机可以通过网络实现远程监控,用户可以随时随地监测设备状态,进行远程操作。
5. 数据存储5.1 数据库存储:上位机可以将采集到的数据存储到数据库中,方便用户进行历史数据查询和分析。
5.2 日志记录:上位机可以记录用户的操作和设备的状态变化,以备后续分析和故障排查。
上、下位机通信协议分析
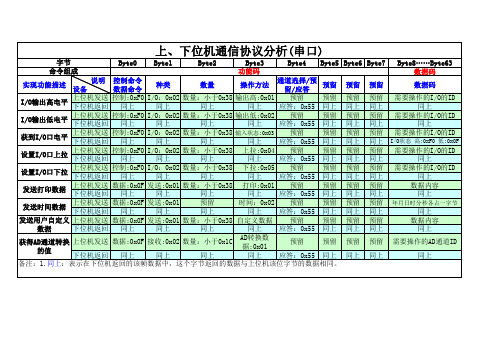
字节 命令组成 实现功能描述 I/O输出高电平 I/O输出低电平 获到I 获到I/O口电平 说明 设备 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 Byte0 控制命令 数据命令 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 数据:0x0F 同上 数据:0x0F 同上 数据:0x0F 同上 Byte1 种类 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 发送:0x01 同上 发送:0x01 同上 发送:0x01 同上 Byte2 数量 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 预留 同上 数量:小于0x38 同上 Byte3 功能码 操作方法 输出高:0x01 同上 输出低:0x02 同上
Byte8上拉:0x04 设置I 设置I/O口上拉 同上 下拉:0x05 设置I 设置I/O口下拉 同上 打印:0x01 发送打印数据 同上 时间:0x02 发送时间数据 同上 自定义数据 发送用户自定义 同上 数据 AD转换数 获得AD AD通道转换 获得AD通道转换 上位机发送 数据:0x0F 接收:0x02 数量:小于0x1C 预留 预留 预留 据:0x01 的值 下位机返回 同上 同上 同上 同上 应答:0x55 同上 同上 备注:1.同上:表示在下位机返回的该帧数据中,这个字节返回的数据与上位机该位字节的数据相同。
上位机下位机串口通信
大连海事大学课程设计报告课程名称:计算机微机原理课程设计成员:成员1:2220133293 范凯锋成员2:2220132642 唐绍波成员3:2220130079 曹晓露设计时间:2016年3月7日至3月18日考核记录及成绩评定目录1.设计任务与要求 (1)1.1课程设计题目 (1)1.2课程设计的背景 (1)1.3课程设计的目的 (1)1.4课程设计的意义 (1)1.5设计任务 (1)2.设计方案 (2)2.1参数采集和传输设计 (2)2.2参数显示设计 (2)2.3模拟信号采样设计 (2)2.4硬件研制过程 (2)3.详细设计 (3)3.1硬件系统框图与说明 (3)3.2硬件设计 (4)3.3软件主要模块流程图与说明 (7)4.设计结果及分析 (8)5.成员分工及工作情况 (9)5.1成员分工 (9)5.2工作情况 (9)5.3实验总结 (9)6.参考文献 (9)7. 附录 (10)一、设计任务与要求1.1课程设计题目双机数据采集系统设计1.2 课程设计的背景二十一世纪是信息化高速发展的世纪,产业的信息化离不开微型计算机的支持。
微型计算机的进步是推动全球信息化的动力。
因此在二十一世纪掌握微型计算机接口技术是十分有必要的。
本次课题是双机参数采集系统设计,这次课题旨在通过自己对所需功能芯片的设计与实现来巩固以前所学的微机原理课程知识,同时也提高动手实践的能力,还有为将来进行更大规模更复杂的开发积累经验。
随着软件规模的增长,以及随之而来的对软件开发进度和效率的要求,高级语言逐渐取代了汇编语言。
但即便如此,高级语言也不可能完全替代汇编语言的作用。
1.3课程设计的目的《微机原理与汇编语言》是一门实践性和实用性都很强的课程,本次课程设计是在课程学习结束后,为使学生进一步巩固课堂和书本上所学知识,加强综合能力,充分理解和运用所学到的知识,通过简单的应用系统的设计,提高系统设计水平,启发创新思想。
通过本课程设计希望达到以下目地:✧培养资料搜集和汇总的能力;✧培养总体设计和方案论证的意识;✧提高硬件,软件设计与开发的综合能力;✧提高软件和硬件联合调试的能力;✧熟练掌握相关测量仪器的使用方法;✧掌握相关开发软件,仿真软件的使用方法。
上位机和下位机串行通信设计

上位机和下位机串行通信设计
首先,需要确定通信协议。
常见的通信协议有RS-232C、RS-485、Modbus等。
通信协议的选择应考虑通信距离、速度要求、可靠性等方面
的因素。
例如,RS-232C通信协议适用于较短距离的通信,速度较慢,而RS-485通信协议适用于长距离通信,速度较快。
其次,确定通信方式。
通信方式常见的有同步通信和异步通信。
同步
通信是指数据的发送和接收在时间上保持一致,需要以时钟信号为基准。
而异步通信是指数据的发送和接收不需要时钟信号作为同步信号,通过起
始位、停止位和校验位来保证数据的正确性。
通信方式的选择应根据实际
需求来确定。
接下来,需要定义数据格式。
数据格式的定义包括数据的编码方式、
各字段的长度和含义等。
常见的数据编码方式有ASCII码、BCD码、二进
制码等。
数据格式的字段长度和含义应根据具体的应用需求来确定,例如,一个字段可以表示一个传感器的测量值,另一个字段可以表示一个控制指令。
最后,需要进行通信接口的硬件设计和软件实现。
通信接口的硬件设
计包括电路设计、接口电平的匹配等。
通信接口的软件实现包括通信协议
的解析、数据的打包和解包、错误处理等。
总结起来,上位机和下位机串行通信设计是一个复杂的系统设计过程,需要综合考虑通信协议、通信方式、数据格式等因素,以实现上位机与下
位机之间的可靠通信。
在设计过程中,需要注意各种细节问题,并进行充
分的测试和调试,以确保通信系统的稳定性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
培养总体设计和方案论证的意识;
提高硬件,软件设计与开发的综合能力;
提高软件和硬件联合调试的能力;
熟练掌握相关测量仪器的使用方法;
掌握相关开发软件,仿真软件的使用方法。
1.4课程设计的意义
通过课程设计加深理解课堂教学内容,培养了我们资料搜集和汇总的在能力以及总体设计和方案论证的意识,锻炼了我们硬件、软件设计与开发的综合能力,提高了我们软件和硬件联合调试的能力,使我们掌握了相关测量仪器和相关开发软件以及仿真软件的使用方法,掌握计算机接口技术的基本应用方法。也掌握了常用接口电路的设计,掌握8255A、8253、8259A、8250A、ADC0809、DAC0832等接口芯片的应用和编程方法,进一步熟悉汇编语言的语法和编程技巧,以及双机通讯所用到的理论基础。
1.4课程设计的意义…………………………………1
1.5设计任务………………………………………1
2.设计方案…………………………………………2
2.1参数采集和传输设计………………………………2
2.2参数显示设计……………………………………2
2.3模拟信号采样设计…………………………………2
2.4硬件研制过程……………………………………2
3.详细设计…………………………………………3
3.1硬件系统框图与说明………………………………3
3.2硬件设计………………………………………4
3.3软件主要模块流程图与说明…………………………7
4.设计结果及分析…………………………………8
5.成员分工及工作情况……………………………9
5.1成员分工………………………………………9
1.5设计任务
双机数据采集系统设计,制定适当的通信协议包括命令编码,数据编码格式,通信速率、采样周期、校验方式等;
模拟信号输入:可用实验箱上的电位器模拟。
每路模拟量/开关量信号的采样时间为0.5s,即每秒采样2次。
通信接口:自选(推荐串口)
二、设计方案
2.1参数采集和传输设计
下位机通过74LS244采集1路开关量,模拟量由电位器产生,从ADIN0输入,通过串口82电路图
三、详细设计
3.1硬件系统框图与说明
图 3-1 硬件系统框
下位机:8255:PB口,都选用方式0。下位机的采集转换的数据通过8250传到上位机,上位机接收到数据经过处理后通过8250回送到下位机。
8253:完成定时采样的功能,采样周期为0.5s。
8259A:用于0.5s触发中断。
综合评语(设计方案、实践环节、问题解答、设计报告)
成绩
2220133293
范凯锋
2220132642
唐绍波
2220130079
曹晓露
1.设计任务与要求…………………………………1
1.1课程设计题目……………………………………1
1.2课程设计的背景…………………………………1
1.3课程设计的目的…………………………………1
随着软件规模的增长,以及随之而来的对软件开发进度和效率的要求,高级语言逐渐取代了汇编语言。但即便如此,高级语言也不可能完全替代汇编语言的作用。
1.3课程设计的目的
《微机原理与汇编语言》是一门实践性和实用性都很强的课程,本次课程设计是在课程学习结束后,为使学生进一步巩固课堂和书本上所学知识,加强综合能力,充分理解和运用所学到的知识,通过简单的应用系统的设计,提高系统设计水平,启发创新思想。通过本课程设计希望达到以下目地:
2.2参数显示设计
模拟信号通过A/D转换器转换成数字信号下位机的数码管上显示,发送到PC机的数据通过串口工具显示
2.3模拟信号采样设计
通过8253定时触发8259中断,以达到定时采样的目的,0.5秒采样一次。
2.4硬件研制过程
(1)整个硬件系统划分为7个功能单元电路,包括:定时采样(8253),查询功能(244),模数转换(0809),数据传输(8255,8250),数字显示(数码管),模拟量显示(示波器)
(2)系统所选用各芯片的工作方式如下:
▪ 8255的工作方式:B口方式0,输入
▪8253的工作方式:计数器1,方式3(方波发生器), 计数初值3750,其时钟接clk3;计数器2,方式3,计数初值100,其时钟接out1
▪8250的工作方式:无奇偶校验,8个数据位,一个停止位
▪8259的工作方式:上升沿触发,一般嵌套,自动结束中断
大连海事大学
课程设计报告
课程名称:计算机微机原理课程设计
成 员:
成 员1:2220133293 范凯锋
成 员2:2220132642 唐绍波
成 员3:2220130079 曹晓露
设计时间:2016年3月7日至3月18日
考核记录及成绩评定
题目
双机数据采集系统设计
完成的主要工作
基本功能:实现数据采集,双机通信和基本形式的数据显示。其中下位机用数码管显示(或液晶屏)显示。具体实现要求:
5.2工作情况………………………………………9
5.3实验总结………………………………………9
6.参考文献………………………………………9
7. 附录……………………………………………10
一、设计任务与要求
1.1课程设计题目
双机数据采集系统设计
1.2课程设计的背景
二十一世纪是信息化高速发展的世纪,产业的信息化离不开微型计算机的支持。微型计算机的进步是推动全球信息化的动力。因此在二十一世纪掌握微型计算机接口技术是十分有必要的。本次课题是双机参数采集系统设计,这次课题旨在通过自己对所需功能芯片的设计与实现来巩固以前所学的微机原理课程知识,同时也提高动手实践的能力,还有为将来进行更大规模更复杂的开发积累经验。
(1)上位机发送一个启动命令(自己定义命令的格式和内容)给下位机;
(2)下位机接收到启动命令后开始采集1路模拟量数据(用电位器模拟实现)和1路开关量数据,并将模拟量转换成数字量在数码管(或液晶屏)上实时显示,然后把模拟量数据和开关量数据发送给上位机;
(3)上位机接收到数据后在显示器上显示。
成员分工
成员曹晓露进行资料的搜集,下位机的连线和程序的调试,成员范凯锋负责实验代码的编写以及相应流程图,成员唐绍波进行实验报告的撰写及相关画图。
0809:完成模数转换的功能。