FCFC参数设置中文说明
FC系列中文操作说明(神港)
注意
• PID自整定(AT)的执行,请在试运行时实施。 • 为防止触电及发生调节仪故障,通电中请勿触及端子。 • 在实施端子锁紧或清洁作业时,必须在调节仪电源关闭的情况下执行。
通电期间作业,可能因触电而产生重大人身伤害。 • 在清洁时,请用柔软的干布。 • 应避免用硬物撞击和刮擦显示器。
1.2 模糊自整定 (1) 控制开始时,由以前的 PID 参数执行控制。 (2) 当控制结果因扰动或过程变化而异常时,仪表则监测此时的收敛状态,如有必要,自动调整 PID 参数。 (a)如收敛平滑且速度不慢,不改变 PID 值。 (b)如收敛速度太慢,仪表校正 PID 值使收敛变快。 (c)收敛过程中发现超调时,仪表自动调节 PID 值以避免发生超调。 (d)发生振荡时,调节仪检查波形和精细地自动调节 PID 值。 (3) 由内部开关设置,可使调节仪设定为带或不带模糊自行整定的 PID。
功能
1
控制方式
和
2
模糊自整定PID 控制 PID 控制 PD 控制 ON/OFF 控制
加热/冷却 3
加热(反作用)动作 冷却(正作用)动作
报警 1
无待机动作
待机
4
待机动作
报警 2
无待机动作
待机
5
待机动作
/
6
输入传感器
7*
K, J, R, B, N, PL- , Pt100, JPt100 S, E, T, C, 4 ~ 20mA, 0 ~ 20mA,
• 本调节仪使用说明书内所记载的注意及警告事项,请严格遵守。 如不遵守,可能导致重大伤害事故,请注意。
• 本说明书记载的内容可能会有变更。 • 本说明书尽可能予以周全叙述,如有不详或错误,敬请谅解,并予告知。 • 本调节仪计划安装在控制屏内,如果不是,请保证工作人员不能触摸到电源端子和高压部分。 • 不可将调节仪用于涉及人身安全的医学应用。 • 禁止任何未经授权的部分或全部复制本说明书。 • 本调节仪外壳是由阻燃树脂等做成的,请勿在易燃材料附近或易燃材料上安装本调节仪。
带通滤波参数
带通滤波参数
带通滤波器是一种滤波器,可以将一定范围内的频率通过,而将其他频率信号滤除。
带通滤波器的参数通常包括中心频率(fc)、通带宽度(Bw)、阻带宽度(Bs)等,具体解释如下:
中心频率(fc):带通滤波器的通带范围中心的频率,通常以Hz为单位。
通带宽度(Bw):带通滤波器通带的宽度,指通过的频率范围,可以用频率或者角频率表示。
常用的单位有Hz或者rad/s。
阻带宽度(Bs):带通滤波器阻带的宽度,指未通过的频率范围,可以用频率或者角频率表示。
常用的单位有Hz或者rad/s。
通带最大衰减(Ap):带通滤波器在通带内最大的允许衰减,一般以dB为单位。
阻带最小衰减(As):带通滤波器在阻带内最小的要求衰减,一般以dB为单位。
滤波器类型:带通滤波器有多种类型,如理想带通滤波器、巴特沃斯带通滤波器、切比雪夫带通滤波器等,不同类型的带通滤波器有着不同的性能和特点。
这些参数通常用来描述带通滤波器的性能和特性,通过调整这些参数可以实现不同的带通滤波器设计。
在实际应用中,需要根据具体的需求和信号特点选择合适的带通滤波器类型和参数。
FC(NES)修改教程

FC(NES)游戏修改基础教程14号拐角一、序言在童年时期,很多人或许对于FC的回忆有许许多多,我也不例外,不过说实在话,我在家能玩到的FC游戏非常的少,回忆起来也只有几个,坦克大战,魂斗罗,赤色要塞,沙罗曼蛇……当然最经典的还是小时候玩的热血格斗……之后就由于种种原因再也没有接触了,直到PC的出现,我又重温了那些经典。
但是每每看到网上各种HACK版本,总是希望自己也能做点什么修改,所以各种找教程,各种翻资料……可能对于FC这种已经淘汰的游戏没有很多人关心一样,教程的东西也像烟雾弹一般,可以忽略一样……但是对于已经进入迷途的我,似乎有种由衷的爱好般……我教过一些人,但是总觉得自己的方法或许不得当,教不会,今天写出这些东西,希望能遇到一些有天赋的人,如果能遇到给予我批评指出的人或许会更好。
我不能保证我100%全对,有误的地方希望大家能更正吧。
好吧,或许大家都不喜欢看废话,于是我们开始吧……二、基础修改修改,当然要准备工具,这里我推荐一个非常强大的FC模拟器——FCEUX 系列,现在最新版本是2.1.6吧(在我打这篇文章的时候),它提供了非常齐全完善的调试器和16进制编辑器。
当然,如果要修改FC贴图的话可以用很多FC 贴图修改器进行修改,网上应该有很多,这里我找不到好的东西,大伙可以自己找找吧,我主要是讲解游戏内容的修改,而不是贴图修改。
好吧,我们开始修改我修改到恶心的游戏——魂斗罗。
对于这一段,感谢小粽子以前的教诲。
魂斗罗很经典,可能到今天都没有人能够一命通关,对于这些头疼的玩家,我们就给他几个选项。
1、无限命;2、无限金身;3、瞬秒敌人(不推荐修改,有点偏高端)。
友情提示,以下16进制编辑器中,在查看菜单有NES内存、PPU内存、ROM 文件,所以在进行修改之前,请注意自己所在那一页,以免修改错误导致没有相应的效果出现。
只有NES内存和PPU内存才能右键,但是在NES内存下无法进行修改,一改变之后数值会立即转变成为没有修改的状态,注意好自己所在页。
FC简易操作说明
FX-501-C2简易操作说明本操作说明仅代表FX-501-C2在切槽装配机上的使用,详细设置或应用到到其它场所请查看FX-501-C2的官方说明书。
1.复位设置1.1、在待机画面按“MODE”键三下,显示“”。
1.2、按“SET”键一下,显示“”。
1.3、按“+”键四下,显示“”。
1.4、按“SET”键一下,显示“”。
1.5、按“+”键二下,显示“”。
1.6、按“SET”键一下,显示“”。
1.7、按“SET”键一下,显示“”并闪烁,这时感应器复位中,完成后会自动返回待机画面。
2.输出设置(常开/常闭设置)2.1、在待机画面按“MODE”键三下,显示当前输出设置状态。
“”代表设定值(绿色)比检测值(红色)低时有输出。
“”代表设定值(绿色)比检测值(红色)高时有输出。
2.2、按“+”键或“-”键选择所需要的输出设置。
2.3、按“MODE”键四下,返回到待机画面。
3.设定值调整3.1、在没有放入检测物的状态下,观察并记录当前检测值(红色)。
3.2、在放入检测物的状态下,观察并记录当前检测值(红色)。
3.3、计算初步设定值:①有料检测值>无料检测值时初步设定值=(有料检测值-无料检测值)/2+无料检测值②有料检测值<无料检测值时初步设定值=(无料检测值-有料检测值)/2+有料检测值3.4、通过按“+”键和“-”键输入初步设定值,完成后感应器会闪烁几下并自动存储。
3.5、试运行并观察检测效果,需要时通过按“+”键和“-”键微调设定值,以达到最佳效果。
4.震盘料反吹气逻辑5.直震2胶盖反检测逻辑。
FC参数设置方法
FC参数设置方法FC(Fully Connected)层是神经网络中常见的一种层类型,通常用于将前一层的输出与当前层的输出进行全连接。
在深度学习中,FC层广泛应用于分类、回归等任务中。
在使用FC层时,合理设置参数是非常重要的,下面将介绍一些常用的FC参数设置方法。
1.设置神经元数量:在使用FC层时,首先要确定每个FC层的神经元数量。
神经元数量决定了FC层的表达能力,一般来说,神经元数量越多,FC层的表示能力越强。
但是太多的神经元数量会引起过拟合问题,而太少的神经元数量则可能导致欠拟合。
通常的做法是通过实验或者经验选择适当的神经元数量。
2.设置激活函数:在FC层中,激活函数对神经元的输出进行非线性变换,增加了网络的表达能力。
常见的激活函数有sigmoid、tanh、ReLU等。
选择适当的激活函数有助于提高网络的性能。
一般来说,ReLU是一种比较常用的激活函数,在实践中表现较好。
3.设置输入大小:在使用FC层之前,需要确定输入数据的大小。
输入数据的大小决定了FC层中权重参数的维度,也决定了输出数据的大小。
合理设置输入数据的大小有助于减少计算量和内存占用。
4.设置权重初始化方法:权重的初始化方法对网络的训练和性能具有重要影响。
常见的权重初始化方法有随机初始化、Xavier初始化、He初始化等。
随机初始化是最常用的方法,即将权重参数随机初始化为一个很小的值或者很大的值。
Xavier初始化和He初始化是针对ReLU激活函数提出的初始化方法,能够更好地保持梯度流动性。
根据网络结构和激活函数的不同,选择适当的权重初始化方法。
5.设置偏置初始化方法:除了设置权重初始化方法,还需要设置偏置初始化方法。
偏置初始化方法通常与权重初始化方法配套使用。
常见的偏置初始化方法有常数初始化、零初始化等。
根据实际需求和初始化方法的特点,选择适当的偏置初始化方法。
6.设置学习率:学习率是深度学习中非常重要的一个超参数,用于调整权重参数的更新幅度。
SCALE-FC105说明2013

FC105、FC106参数设置中文说明20131、FC105SCALE功能接受一个整型值(IN),并将其转换为以工程单位表示的介于下限和上限(LO_LIM和HI_LIM)之间的实型值。
将结果写入OUT。
SCALE功能使用以下等式:OUT = [ ((FLOAT (IN) -K1)/(K2-1)) * (HI_LIM-O_LIM)] + LO_LIM常数K1和K2根据输入值是BIPOLAR还是UNIPOLAR设置。
BIPOLAR:假定输入整型值介于 7648与27648之间,因此K1 = -7648.0,K2 = +27648.0 UNIPOLAR:假定输入整型值介于0和27648之间,因此K1 = 0.0,K2 = +27648.0如果输入整型值大于K2,输出(OUT)将钳位于HI_LIM,并返回一个错误。
如果输入整型值小于K1,输出将钳位于LO_LIM,并返回一个错误。
通过设置LO_LIM > HI_LIM可获得反向标定。
使用反向转换时,输出值将随输入值的增加而减小。
FC105参数参数说明数据类型存储区描述EN 输入 BOOL I、Q、M、D、L 使能输入端,信号状态为1时激活该功能。
ENO 输出 BOOL I、Q、M、D、L 如果该功能的执行无错误,该使能输出端信号状态为1。
IN 输入 INT I、Q、M、D、L、P、常数欲转换为以工程单位表示的实型值的输入值。
HI_LIM 输入 REAL I、Q、M、D、L、P、常数以工程单位表示的上限值。
LO_LIM 输入 REAL I、Q、M、D、L、P、常数以工程单位表示的下限值。
BIPOLAR 输入 BOOL I、Q、M、D、L 信号状态为1表示输入值为双极性。
信号状态0表示输入值为单极性。
OUT 输出 REAL I、Q、M、D、L、P 转换的结果。
RET_VAL 输出 WORD I、Q、M、D、L、P 如果该指令的执行没有错误,将返回值W#16#0000。
FCFC参数设置中文说明(终审稿)
F C F C参数设置中文说明公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]FC105、FC106参数设置中文说明1、FC105SCALE功能接受一个整型值(IN),并将其转换为以工程单位表示的介于下限和上限(LO_LIM和HI_LIM)之间的实型值。
将结果写入OUT。
SCALE 功能使用以下等式:OUT = [ ((FLOAT (IN) -K1)/(K2-1)) * (HI_LIM-O_LIM)] + LO_LIM常数K1和K2根据输入值是BIPOLAR还是UNIPOLAR设置。
BIPOLAR:假定输入整型值介于 7648与27648之间,因此K1 = ,K2 = +UNIPOLAR:假定输入整型值介于0和27648之间,因此K1 = ,K2 = +如果输入整型值大于K2,输出(OUT)将钳位于HI_LIM,并返回一个错误。
如果输入整型值小于K1,输出将钳位于LO_LIM,并返回一个错误。
通过设置LO_LIM > HI_LIM可获得反向标定。
使用反向转换时,输出值将随输入值的增加而减小。
FC105参数参数说明数据类型存储区描述EN 输入 BOOL I、Q、M、D、L 使能输入端,信号状态为1时激活该功能。
ENO 输出 BOOL I、Q、M、D、L 如果该功能的执行无错误,该使能输出端信号状态为1。
IN 输入 INT I、Q、M、D、L、P、常数欲转换为以工程单位表示的实型值的输入值。
HI_LIM 输入 REAL I、Q、M、D、L、P、常数以工程单位表示的上限值。
LO_LIM 输入 REAL I、Q、M、D、L、P、常数以工程单位表示的下限值。
BIPOLAR 输入 BOOL I、Q、M、D、L 信号状态为1表示输入值为双极性。
信号状态0表示输入值为单极性。
OUT 输出 REAL I、Q、M、D、L、P 转换的结果。
RET_VAL 输出 WORD I、Q、M、D、L、P 如果该指令的执行没有错误,将返回值W#16#0000。
FC 快速设定指南 丹佛斯变频器调试

MAKING MODERN LIVING POSSIBLEFC111快速设定指南VLT®HVAC Basic Drive FC111一、FC111接线图每台水泵运行仅由变频器的一个输出控制每台水泵运行由变频器的两个输出控制:工频、变频运行● 固定模式:至多5台泵● 无需使用专门PLC 控制器● 循环模式:至多4台泵● 固定模式:无● 2个继电器及2个可编程数字输出可用● 循环模式:至多3台泵● 2个继电器、2个可编程数字输出、2个模拟量输出可用一泵一继模式一泵两继模式二、LCP操作面板使用说明文本显示屏菜单键返回键上键运行指示灯确认键警告指示灯报警指示灯下键手动运行停止/复位自动运行Menu可以通过查看Status、Quick Menu和Main Menu上方的三角形进行判断Hand On变频器手动运行,允许通过本地控制面板(LCP)控制变频器Off Reset 用于停止电动机,如果在报警模式下,报警将被复位Auto On变频器自动运行,可以通过控制端子或串行通讯来控制变频器如何设置参数:1、首次上电时,系统会要求用户选择首选语言,一旦选定后,在此后上电过程中将不再显示①开环应用向导②闭环设置向导③电动机设置④已完成的更改 (与出厂设置相比较)菜单键,通过连续点击,可以在“状态菜单(Status)”、“快捷菜单(Quick Menu)”和“主菜单(Mai 注意:端子27默认是惯性停车,只有当其接有24V输入时,方可允许手动运行,因此请确保将端子122、点击Menu按键,可以在快捷菜单(Quick Menu)和主菜单(Main Menu)之间进行切换3、快捷菜单状态下,提供了大多数应用所需的设置:与27连接Menu)”之间进行切换状态(Status)快捷菜单(Quick Menu)4、主菜单(Main Menu)中,可以对所有参数进行编程设置:0-**运行和显示13-**智能逻辑1-**负载和电动机14-**特殊功能2-**制动15-**变频器信息3-**参考值/加减速16-**数据读数4-**极限/警告18-**数据读数25-**数字输入/输出20-**FC闭环6-**模拟输入/输出22-**应用功能8-**通讯和选件24-**应用功能225-**多泵控制器5、参数调整一般可分为两类:一是在现有菜单中选择,二是数值直接修改,分别说明如下:6、使用开环应用向导(FC101 Wizard),当所有参数设置完成后,控制面板提示如下:“Wizard Completed Press OK to accept”,按[OK]键完成设置向导如何恢复出厂设置:1、在主菜单(Main Menu)中选择参数14-22 Operation Mode2、按操作面板上的[OK]键,进入参数调整状态3、选择[1]初始化,然后按[OK]键确定4、切断主电源,等待显示屏关闭5、重新连接主电源-此时变频器已复位6、请注意:参数组8-**、15-**中的部分参数不会因以上操作而改变I.现有参数菜单中选择II.直接修改参数数值三、FC111参数设定表_开环控制FC111开环应用设置向导参数代码范围默认设置推荐设置最终设置功能0-03Regional Settings 区域设置[0] 国际[1] 美国区域设定:国际或美国1-20Motor Power 电动机功率0.12-110kW / 0.16-150Hp 同规格有关根据电动机铭牌数据输入电动机功率1-22Motor Voltage 电动机电压50.0 - 1000.0V 同规格有关根据电动机铭牌数据输入电动机电压1-23Motor Frequency 电动机频率20.0 - 400.0Hz 同规格有关根据电动机铭牌数据输入电动机频率1-24Motor Current 电动机电流0.01-10000.0A 同规格有关根据电动机铭牌数据输入电动机电流1-25Motor Normal Speed电动机额定转速100.0 - 9999.0RPM 同规格有关根据电动机铭牌数据输入电动机额定转速4-12Motor Speed Low Limit [Hz]电动机最低转速0.0 - Hz 0 Hz 输入速度下限4-14Motor Speed High Limit [Hz]电动机最高转速0.0 - Hz 65 Hz 输入速度上限3-41Ramp 1 Ramp Up Time 加速时间0.05 - 3600.0s 3从0达到额定电动机频率(参数1-23)的加速时间3-42 Ramp 1 Ramp Down Time 减速时间0.05 - 3600.0s 3从额定电动机频率(参数1-23)下降到0的减速时间1-73Flying Start 飞车启动[0]禁用[1]启用0如果希望变频器能够捕获空转电动机,请选择“启用”6-19Terminal 53 mod端子53模式[0]电流[1]电压1选择端子53是用于电流还是用于电压输入6-10Terminal 53 Low Voltage 端子53低电压0-10V 0.07V 输入与低参考值对应的电压6-11Terminal 53 High Voltage 端子53高电压0-10V 10V 输入与高参考值对应的电压6-12Terminal 53 Low Current 端子53低电流0-20mA 4输入与低参考值对应的电流6-13Terminal 53 High Current 端子53高电流0-20mA 20输入与高参考值对应的电流3-02Minimum Reference 最小参考值-4999-49990最小参考值是通过汇总所有参考值获得的最小值3-03Maximum Reference最大参考值-4999-499950最大参考值是通过汇总所有参考值获得的最小值5-40 Function Relay [0] Function 继电器1功能请参阅5-40 Function Relay 无功能选择用于控制输出继电器1的功能5-40 Function Relay [1] Function 继电器2功能请参阅5-40 Function Relay无功能选择用于控制输出继电器2的功能1-29Automatic Motor Adation电动机自适配关通过执行AMA来优化电动机性能说明:1、使用开关量输入信号时,请根据开关量输入的类型:源(PNP)、接收(NPN),相应设置参数5-00(端子18、19、27)、参数5-01(端子29)3、完成参数设置后,在表格的最终设置一栏中进行记录、存档以便于将来的维护2、如需使用自动能量优化(AEO),务必在开启该功能之前执行电机优化功能(AMA)参数名称FC111闭环应用设置向导参数代码范围默认设置推荐设置最终设置功能0-03 Regional Settings 区域设置[0] 国际[1] 美国区域设定:国际或美国1-20 Motor Power 电动机功率0.12-110kW / 0.16-150Hp 同规格有关根据电动机铭牌数据输入电动机功率1-22 Motor Voltage 电动机电压50.0 - 1000.0V 同规格有关根据电动机铭牌数据输入电动机电压1-23 Motor Frequency 电动机频率20.0 - 400.0Hz 同规格有关根据电动机铭牌数据输入电动机频率1-24 Motor Current电动机电流0.01-10000.0A 同规格有关根据电动机铭牌数据输入电动机电流1-25 Motor Normal Speed电动机额定转速100.0 - 9999.0RPM 同规格有关根据电动机铭牌数据输入电动机额定转速4-12 Motor Speed Low Limit [Hz]电动机最低转速0.0 - Hz 0 Hz 输入速度下限4-14 Motor Speed High Limit [Hz]电动机最高转速0.0 - Hz65 Hz 输入速度上限3-41 Ramp 1 Ramp Up Time 加速时间0.05 - 3600.0s 3从0达到额定电动机频率(参数1-23)的加速时间3-42 Ramp 1 Ramp Down Time 减速时间0.05 - 3600.0s 3从额定电动机频率(参数1-23)下降到0的减速时间1-73 Flying Start 飞车启动[0]禁用[1]启用0如果希望变频器能够捕获空转电动机,请选择“启用”风机系统可启用本功能,水泵系统一般禁用3-02 Minimum Reference 最小参考值-4999-49990最小参考值是通过汇总所有参考值获得的最小值3-03 Maximum Reference 最大参考值-4999-499950最大参考值是通过汇总所有参考值获得的最小值3-10 Preset Reference 设定值-100-100%0输入给定值6-29 Terminal 54 mode端子54模式[0]电流[1]电压1选择端子54是用于电流还是用于电压输入6-20 Terminal 54 Low Voltage 端子54低电压0-10V 0.07V 输入与低参考值对应的电压6-21 Terminal 54 High Voltage 端子54高电压0-10V 10V 输入与高参考值对应的电压6-22 Terminal 54 Low Current 端子54低电流0-20mA 4输入与低参考值对应的电流6-23 Terminal 54 High Current端子54高电流0-20mA20输入与高参考值对应的电流6-24 Terminal 54 Low Ref./Feedb.Value 端子54低参考/反馈值-4999-49990输入与在参数6-20/6-22中设置的电压或电流值对应的反馈6-25 Terminal 54 High Ref./Feedb.Value 端子54高参考/反馈值-4999-499950输入与在参数6-21/6-23中设置的电压或电流值对应的反馈6-26 Terminal 54 Filter Time Constant 端子54过滤器时间常数0-10s0.01输入滤波器时间常数20-81 PI Normal/Inverse control PI正常/反向控制[0]正常[1]反向0如果选择正常[0],则会对过程控制进行设置,让它在过程误差为正时增加输出速度。
FC300 接线及参数设置
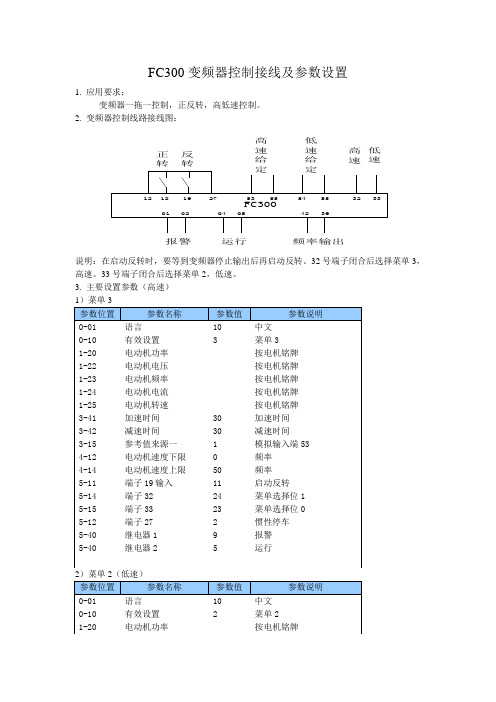
FC300变频器控制接线及参数设置1. 应用要求:变频器一拖一控制,正反转,高低速控制。
2. 变频器控制线路接线图:394201频率输出运行0219275553123332F C 300高速给定正转04报警05185554低速给定反转高速低速说明:在启动反转时,要等到变频器停止输出后再启动反转。
32号端子闭合后选择菜单3,高速。
33号端子闭合后选择菜单2,低速。
3. 主要设置参数(高速)1-22 电动机电压按电机铭牌1-23 电动机频率按电机铭牌1-24 电动机电流按电机铭牌1-25 电动机转速按电机铭牌3-41 加速时间30 加速时间3-42 减速时间30 减速时间3-16 参考值来源2 2 模拟输入端544-12 电动机速度下限0 频率4-14 电动机速度上限50 频率5-11 端子19输入11 启动反转5-14 端子32 24 菜单选择位15-15 端子33 23 菜单选择位05-12 端子27 2 惯性停车5-40 继电器1 9 报警5-40 继电器2 5 运行3)最后把参数0-10的参数设置为9,多重菜单。
4. 要在菜单3,和菜单2里把参数都设置一遍,最后把0-10的参数设置为多重菜单,运行前可闭合32,33号端子,观察一下菜单有无变化,可在面板上看到菜单的变化。
5. 运行时先按一下变频器控制面板的AUTO ON 键,然后才能启动变频器运行。
注:4-10设置为双向,5-11也应改为双向。
另外,由于端子32、33的转换为非无扰切换,所有在菜单的切换过程中会跳转到其他的菜单,比如菜单1,此时就应该在菜单1中也设置5-14和5-15这两个参数。
丹佛斯变频器FC使用说明
使用说明一、FC360的功能二、FC360本机面板使用HandON从出厂设定开始(未接控制线),首先,按【OffReset】键使变频器处于停止状态,设定参数5-12改为【0】,退出到Status状态,这时,还是【OffReset】键上的灯亮,按【OK】键,面板中心显示4位数值,设定手动频率,上下键增减,右键可窜位,设定好后,按【Handon】键计开始运行,运行过程中直接按键改变数值则立即更改输出。
按【OffReset】键停止。
设定的频率值将保持,再次按【Handon】键,将从运行最后的设定值。
三、FC360参数设定方法:通用的参数设定方法:首先,按【OffReset】键使变频器处于停止状态,按【MENU】键显示OM1状态此时在按一次【MENU】键则进入菜单1模式,按上键或下键可以修改参数组号,按【OK】进入此参数组,按上下键找到你需要改的参数号,按【OK】键该设定参数值闪烁,按上下键修改参数值(功能代码),若按【ok】键保存此次修改的参数。
若按【back】键则取消修改。
四、参数初始化修改参数14-22设定为2(初始化),然后从新上电,此时报警为A80,按【OffReset】键复位后红色报警等已灭,但显示窗口仍有A80报警显示,变频器需再次从新上电。
五、参数复制到LCP面板。
修改参数0-50参数,当0-50,设为【1】所有参数到LCP,从变频器拷贝参数到面板,等待完成。
设为[2]则把面板中参数拷贝到变频器,从LCP传所有参数。
完成后参数自动改为【0】。
六、使用同步电机的设定步骤按下表设定:1、首先,设定1-00,1-01,1-10,及1-24,1-25,1-26(按电机铭牌)2、电机自学习AMA,设定1-29,为【1】,按OK键,按【Handon】键,等待,经过一段时间,会显示“按【OK】键完成AMA”,按下【OK】键完成。
3、输入电机反电动势1-40;输入电缆长度1-424、输入其它参数;5、试运行。
FC型称重控制器操作说明常用操作

F C型称重控制器操作说明常用操作Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】F701C型称重控制器操作说明常用操作一、清零或校零操作当秤内已清空,显示器示值不在零位,且偏差较大时进行清零或校零操作,其操作方法如下:清零操作(一般情况下使用):按“ZERO”键→“红色”确认键校零操作(零位偏差较大时使用):按键“F”→“红色”确认键→数字键“9”→“红色”确认键→“ZERO”键→“红色”确认键二、目标值设定目标值设定为参数“9”,操作方法如下:按数字键“9”→“红色”确认键→输入需要的目标值量→“红色”确认键例设定目标值为25千克每包,依次输入数字9键→红色确认键(此时显示屏上原目标值第一位闪烁)→在前面千位、百位上输入数字0,在十位上输入2,在个位上输入5→按红色确认键,调整完成。
重量微调也使用本参数,例如:设定为50千克每包,但合秤为千克,进入本参数后在原来的数值上减少即可。
三、称重速度调节称重速度调节参数为“4”,操作方法如下:按数字键“4”→“红色”确认键→输入调整量→“红色”确认键说明:数字越小,秤的速度越快,但越容易引起秤的不稳定(称重不稳),反之数字越大,速度越慢,秤越稳定。
调整原则是观察秤的工作过程,调整到称重时由快变慢(即仪表面板的SP1灯熄灭)在称完前的2千克左右为宜。
在大多数情况下秤称重不稳可以通调整这项参四、空中余量调节空中余量调节参数为“6”,操作方法如下:按数字键“6”→“红色”确认键→输入调整量→“红色”确认键说明:此项参数是在实际称重显示值与设定的目标值不一致时使用50千克,每包显示重量为千克左右,进入本项参数后在原来的数值上加上,每包显示重量为千克,则进入参数后在原来的数值上减少五、自动清零包数自动清零包数参数为“F15”项,操作方法如下:按“F”键→“红色”确认键→数字“1”→“红色”确认键→数字“5”→“红色”确认键→输入包数→“红色”确认键→“ESC”键退出。
丹佛斯变频器FC使用说明

使用说明一、FC360的功能二、FC360本机面板使用HandON从出厂设定开始(未接控制线),首先,按【OffReset】键使变频器处于停止状态,设定参数5-12改为【0】,退出到Status状态,这时,还是【OffReset】键上的灯亮,按【OK】键,面板中心显示4位数值,设定手动频率,上下键增减,右键可窜位,设定好后,按【Handon】键计开始运行,运行过程中直接按键改变数值则立即更改输出。
按【OffReset】键停止。
设定的频率值将保持,再次按【Handon】键,将从运行最后的设定值。
三、FC360参数设定方法:通用的参数设定方法:首先,按【OffReset】键使变频器处于停止状态,按【MENU】键显示OM1状态此时在按一次【MENU】键则进入菜单1模式,按上键或下键可以修改参数组号,按【OK】进入此参数组,按上下键找到你需要改的参数号,按【OK】键该设定参数值闪烁,按上下键修改参数值(功能代码),若按【ok】键保存此次修改的参数。
若按【back】键则取消修改。
四、参数初始化修改参数14-22设定为2(初始化),然后从新上电,此时报警为A80,按【OffReset】键复位后红色报警等已灭,但显示窗口仍有A80报警显示,变频器需再次从新上电。
五、参数复制到LCP面板。
修改参数0-50参数,当0-50,设为【1】所有参数到LCP,从变频器拷贝参数到面板,等待完成。
设为[2]则把面板中参数拷贝到变频器,从LCP传所有参数。
完成后参数自动改为【0】。
六、使用同步电机的设定步骤按下表设定:1、首先,设定1-00,1-01,1-10,及1-24,1-25,1-26(按电机铭牌)2、电机自学习AMA,设定1-29,为【1】,按OK键,按【Handon】键,等待,经过一段时间,会显示“按【OK】键完成AMA”,按下【OK】键完成。
3、输入电机反电动势1-40;输入电缆长度1-424、输入其它参数;5、试运行。
FC操作手册
目录第一章 系统简介·············································································································································1. 特点 ······················································································································································· 2. 性能参数·················································································································································· 3. 外形尺寸·················································································································································· 4. 兼容设备目录············································································································································ 5. 系统结构··················································································································································第二章 安 装················································································································································1. 安装过程·················································································································································· 2. 接线图····················································································································································· 3. 拨码开关设置··········································································································································7第三章 操 作················································································································································1. 界面显示·················································································································································· 2. 液晶窗口显示············································································································································ 3. 用户级别·················································································································································· 3.1 登录 ················································································································································· 3.2 退出 ················································································································································· 4. 状态类型··············································································································································20 5. 火警事件处理············································································································································ 6. 故障事件处理············································································································································ 7. 监管事件处理············································································································································ 8. 启动/反馈事件处理 ····································································································································· 9. 实时事件查询············································································································································ 10. 设备属性查询············································································································································ 11. 历史记录查询············································································································································ 12. 如何进行屏蔽/开放 ····································································································································· 13. 如何进行启动/停止 ····································································································································· 14. 如何进行测试/移动测试 ······························································································································· 15. 如何进行定位测试/定位恢复 ························································································································· 16. 如何设置蜂鸣器音量··································································································································· 17. 如何设置登录时间······································································································································ 18. 如何设置移动测试时间································································································································ 19. 如何设置 LCD 关闭时间 ······························································································································ 20. 如何设置时间··········································································································································0 21. 如何进行系统检测······································································································································ 22. 如何保存配置············································································································································ 23. 如何修改参数············································································································································ 24. 如何新建/查看联动关系 ······························································································································· 25. 如何编辑/删除联动关系 ······························································································································· 26. 如何进行组分配/FRT 分配 ··························································································································· 27. 如何查看帮助信息······································································································································ 28. 如何操作联动盘········································································································································· 29. 如何打开/关闭打印机 ·································································································································· 30. 如何替换设备············································································································································。
丹佛斯FC参数设置

按一下菜单键可切换显示、基本设置、区域设置中的一个界面按2次返回键可退出目录FC111设置向导1-2*电动机数据(按电机铭牌设置)1-20电动机功率--- KW1-22电压---- 380V1-23频率---- 50HZ1-24电流--- A速度上限---- 50HZ6-19端子53的模式---电流模式6-12端子53低电流---- 11.2 (最小频率)6-13端子53高电流---- 14.2(最大频率)手动操作按手动键可切换手动操作,按上、下键可修改频率,按停止/复位键可停止运行。
1-**负载和电动机1-06 顺时针方向----正常(改--反向,电机反转)3-**参考值/加减速3-1*参考值给定频率(自动运行)3-10预置参考值--- [0]100% (100% 对应50HZ)3-15预置参考值来源--- [0]无功能模拟量控制3-10预置参考值--- [0]0%3-15预置参考值来源--- [1]模拟输入535-**数字输入/输出5-1*数字输入5-10端子18数字输入------[0]启动5-11端子19数字输入------[11]反向启动5-12端子27数字输入------[1]复位5-4*继电器输出5-40继电器功能---[0][9]报警(端子1,2,3)---[1][5]变频器在运行(端子4,5,6)端子说明:12----公共端,18---正转,19----反转,27---复位;53、55----模拟电流输入(53V-,55V+)1,2,3---故障输出, 4,5,6----运行输出8-**通讯和选择FC端口设置协议----FC (Modbus RTU) 地址----1 波特率--9600 Baud 偶效验,1停止位变频器初始化为默认设置14-**特殊功能14-2*跳闸复位1.选择14-22工作模式2.按?[OK](确定)。
3.选择初始化,然后按?[OK](确定)。
4.切断主电源,等待显示屏关闭。
DANFOSS_FC302变频器设置说明_DP

一、DANFOSS FC302变频器操纵概要【1 】在对变频器进行设置时,最简略的办法是应用图形化当地掌握面板(LCP),如图所示:图17 图形化当地掌握面板LCP该掌握面板分为四个功效组:1.带有状况行的图形显示器.2.菜单键和指导灯:用于更改参数和切换显示功效.3.导航键和指导灯(LED).4.操纵键和指导灯(LED).所稀有据都显示在图形LCP显示屏中,显示[Status](状况)时,最多可以显示5项操纵数据.显示行:a.状况行:显示图形和图形的状况信息b.第1-2行:操纵员数据行,显示用户界说或选择的数据.经由过程按[S tatus](状况)键,最多可以再增长一行.c.状况行:用于显示文本的状况信息.二、DANFOSS FC302变频器电气接线图电气接线图如下图所示:图18 电气接线图三、DANFOSS FC302变频器参数设置A、1-**负载/电念头在当地掌握面板(LCP)上,按键,进入参数设定界面,经由过程或键选择“1-**负载/电念头”,按键,经由过程或键选择“1-2*电念头数据”,按键,经由过程或键选择“1-20电念头功率[kW]”,经由过程或键将参数设为现实功率,按键肯定,即设定完成.按键返回上一级菜单.以下参数的设定办法与此雷同.将“1-2*电念头数据”中的“1-22电念头电压”设为“380”;将“1-2*电念头数据”中的“1-24电念头电流”设为电念头额定电流; 将“1-2*电念头数据”中的“1-25电念头额定转速”设为“额定转速”.须要修正参数:0-01[10] 中文说话选择0-02[1] hz0-23 [1613] hz0-24 [1601] hz1-20 [kw] 电念头gonglv3-00 单向 min—max双向–max--+max3-02 min hz3-03 max hz3-41 加快时光3-42 减速时光4-10 [0] 顺时针 [2] 双向4-19 50hz4-12 电念头速度下限4-14 电念头速度上限8-01 掌握点 [2] 仅掌握字8-03 [3]8-04[2] 停滞B、3-**参考值/加减速将“3-0*参考值极限”中的“3-00参考值规模”设为“min-max”;将“3-4*加减速1”中的“3-41加减速1加快时光”设为“15”;将“3-4*加减速1”中的“3-42斜坡1减速时光”设为“15”.C、4-**极限/警告将“4-1*电念头极限”中的“4-13电念头速度上限[RPM]”设为“电念头最大额定速度”;将“4-1*电念头极限”中的“4-14电念头速度上限[Hz]”设为“50”;将“4-1*电念头极限”中的“4-16电念头转矩极限”设为“160”;将“4-1*电念头极限”中的“4-19最大输出频率”设为“50”;D、8-**通信和选件将“8-0*一般设置”中的“8-01掌握地点”设为“仅掌握字”;将“8-0*一般设置”中的“8-03掌握超不时光”设为“”;将“8-0*一般设置”中的“8-04掌握超时功效”设为“停滞”;将“8-1*掌握字设置”中的“8-10掌握字格局”设为“1”.E、9-**Profibus将“9-18节点地址”设为“站地址”.。
FC Series 控制器图形用户界面手册说明书

Intelligent Stepper Motor StagesController GUI ManualV2.0.xTable of Contents2.2Launch GUI (3)3.2First Connection (6)3.2.1FC Series USB Driver Installation on Windows 7 (6)3.2.2FC Series USB Driver Installation on Window XP (7)3.3USB Driver Installation Verification (9)3.4Discover Instruments (9)4.2Main (13)4.3Parameters (15)4.4Address (16)4.4.1Controller pool setting (17)4.4.2Controller address setting (19)4.4.3Daisy-chaining (20)4.5Diagnostics (21)4.6About (22)FC SeriesIntelligent Stepper Motor Stages1.0Introduction1.1PurposeThe purpose of this document is to provide instructions on how to use the FC SeriesController graphical user interface (GUI).1.2OverviewThe FC Series GUI is a graphical user interface, that allows the user to interact withthe controller that is integrated with intelligent stepper motor stages. The user caninitiate moves, change the state of the controller, adjust configuration parameters, etc.Communication with the FC series is achieved via an RS-422 serial link and a USB toRS422 adaptor. The provided GUI requires USB communication interface, based onWindows TM operating system. Advanced programming is simplified by an ASCIIcommand interface and a set of two letter mnemonic commands.1.3Controller State DiagramThe FC series controller is defined by the following state diagram.Actions in each state when End of Runs is encounteredNOT REFERENCED: No action.CONFIGURATION: No action.HOMING: Only check at end of HOMING and then change toNOT REFERENCED state.MOVING: Abort motion and then change to NOTREFERENCED state.READY: Change to NOT REFERENCED state.DISABLE: Change to NOT REFERENCED state.2.0Installation2.1Install FC Stepper Graphical User InterfaceFollowing are steps to install FC Stepper GUI:•For 32 bit, Select and launch “FCStepper Utility Installer Win32.exe”. For 64 bit,Select and launch “FCStepper Utility Installer Win64.exe”.• A window opens up showing Install welcome page.•Click on “Next”.• A window opens up allowing destination folder selection. By default it is showingC:\.•Click on “Next”.•Ready to install window opens up. Click “Install”.•Then installation starts, wait for completion. Click on “Finish” to finalize theinstallation.32 bit installer will be installed “Newport. mandInterface.dll” inGAC_32 folder and 64 bit installer will be installed the dll in GAC_64 folder.NOTELabVIEW user can add reference of command interface dll from GAC during VIcreation.2.2Launch GUIFrom Windows “START” menu, select “All Programs\Newport\MotionControl\FCStepper\FCStepper Utility”.3.0Getting Started3.1Overview and Setup3.1.1ComponentsUSB-RS422-1.8 USB AdaptorFC-PS40 Power SupplyFC Series Intelligent Stepper Motor Stages3.1.2Electrical Installation1.Connect the USB-RS422-1.8 adaptor cable to the FC series stage.2.Connect the FC-PS40 power supply to the FC series stage.3.Connect the USB cable to an available USB port of the PC4.Connect the power cable to an electrical outlet.3.2First ConnectionCAUTIONB EFORE ANY INSTALLATION,C ONTACT YOUR I.T. ADMINISTRATOR TOVERIFY THAT YOU HAVE THE APPROPRIATE RIGHTS.3.2.1FC Series USB Driver Installation on Windows 71.Connect the FC Series controller to a USB port with the provided USB cable.2.Detection of this new connected device (the first time) is signaled by a message inthe bottom-right of the screen.3.For Windows 7 64 bit, the USB driver installation is completed when the messagedisappears.4.For Windows 7 32 bits, right click on the new detected device and select “Updatedriver”.NOTEAutomatic driver installation requires internet connection.Click “Search automatically for updated driver software”.5.The following window will pop up after driver installation is completed.3.2.2FC Series USB Driver Installation on Window XP1.Download FC_USB_RS422_driver from 2.Run the executable file included.3.Select “Extract” and the following window will pop up.The following page indicates that the drivers have been successfully installed.4.Once the drivers are installed connect the FC series stage to a USB port with theUSB-RS422-1.8 cable.5.Detection of this new connected device (the first time) is signaled by a message inthe bottom -right of the screen.Now, your FC series is installed and ready to use.3.3USB Driver Installation VerificationOpen the “Device Manager” and select the “Device” tab to check your configuration. Inthe display menu, select “View devices by type”.Expand “USB Bus controllers” line and check the new line USB Serial Converter:Expand “Ports (COM and LPT)” line and check the new line USB Serial Port (COMx):NOTESNote the COM port number (x) assigned to the device. This will be required fortroubleshooting.3.4Discover InstrumentsStart the Controller GUI from Newport\MotionControl\FCStepper.Next, click on “Discover” and the number of stages discovered will appear.This window allows the user to select a COM port where the desired stage isconnected.NOTEWhen more than one FC stage is connected, multiple instances of this GUI can be open to control each individual stage. To discern a COM port for a specific instrument, note their COM number in the Device Manager when the connection is added.Next, click “Launch Applet” button.4.0User Interface4.1ConfigurationThe Configuration tab allows the user to view and/or change informationrelated to the logging configuration and the instrument settings.In LoggingConfiguration, read only values are displayed for the log filename and the log file path. The logging level may be changed to any of thesettings in the drop-down list on the right hand side.Trace is the most detailed of the settings. When this setting is selected, theController GUI logs all the information.Critical Error is the least detailed of the settings. When this setting isselected, the Controller GUI will only log errors that are defined to becritical.The polling interval defines the number of milliseconds between each timethe Controller GUI polls the FC series for the latest information. The usermay change the polling interval by entering a value. Diagnostics Delaydefines the time delay in milliseconds between each command sent from atext file.InstrumentType and NoOfInstruments display the name and number ofconnected instruments.The Save button allows the user to save the current settings to theconfiguration file.Configurable settingsThe following table describes all the settings that can be changed by theuser.Parameter Description Values / Type DefaultLoggingConfigurationLevel Logging level.Trace is the most detailed of the settings andwhen this setting is selected the GUI logseverything. Critical Error is the least detailedof the settings and when this setting isselected the GUI will only log errors that aredefined to be critical. TraceDetailEquipment MessageInfoWarningErrorCritical ErrorTraceInstrumentInformationPollingInterval The polling interval defines the number ofmilliseconds (delay) between each time theGUI polls the instrument for the latestinformation.An Integer 200NbDigits Number of fractional digits after the decimalpoint.An Integer 6DiagnosticsDelay The delay defines the number of millisecondsbetween each sent command from a text file.Models\InstrumentInfoCommunicationChannel The communication channel RS232 RS232MemorizedPositionBufferDepth BufferDepth defines the maximum number ofanalog I/O values displayed in the chart.An Integer 5RollingBuffer The list of the memorized position in the rollingbuffer for a selected controller addressA StringSelectedAxisControllerAddress List of the selected controller address. A String4.2MainThe Main tab displays the main controls in the Controller GUI like a virtualfront panel. It is updated each time the polling interval timer expires.“Initialization and Configuration”In the “Initialization and Configuration” area, the first button changes thecontroller status to “Enabled” or "Disabled” To see the different controllerstates, refer to the controller state diagram in section 1.3. The second button“Save Pos.” memorizes the current position in the combo box. As soon as anew position is memorized, this is displayed in the trace.“Current Position”In the “Current Position” area, the current position is displayed in a text boxand visualized in a slider. The slider limits are defined with the ends of run.An LED icon shows the current controller state. When the mouse hoversover the icon, the controller state is displayed in an information balloon.“Incremental Motion / PR-Move Relative”In the “Incremental Motion / PR-Move Relative” area, two increment valuescan be defined. For each defined increment, a relative move is performed ineither the negative or positive direction.“Cyclic Motion” and “Target position / PA”In the “Cyclic Motion” area, a motion cycle is configured with a number of cycles (Cycle) and a dwell time in milliseconds. The motion cycle gets the defined target positions from the “Target Motion / PA” area to perform the cycle.In the “Target Motion / PA”” area, two target positions can be defined. The “Go to” button executes the absolute move to go to the specified target position.“Motion Configuration Values”In the “Motion Configuration Values”, the current ends of run, velocity, and acceleration are displayed in this area: “Minimum end of run”, “Maximum end of run”, “Acceleration”, and “Velocity” can be modified and saved with the “Set” button.Memorized positionsThe combo box memorizes the positions set by the “Save Pos.” button. Each of these positions can be renamed or deleted. To execute an absolute move to one of these memorized positions, select one item of the combo box and click on the “Go to” button. When the mouse moves over to the combo box, the position is shown in an information balloon.Rename a memorized position: Select an item from the combo box, edit the position name to change it and click on the “Rename” button to save the new position name.Delete a memorized position: Select an item from the combo box, right-click on the mouse and select the “Delete” menu to delete the selected memorized position.NOTEThe FC series controller supports native units of millimeter (FCL) or degrees (FCR). All the parameters such as position, velocity and acceleration are defined on the same scale. These units are not shown in the GUI.• Position (Units)• Velocity (Units/s) • Acceleration (Units/s 2)Loop #1Loop #2 Tempo (Dwell)Target #2 Target #1 Tempo (Dwell)Tempo (Dwell) Tempo (Dwell) Loop #N4.3ParametersThe Parameters tab displays the stage parameters for the selected controller.Note modification of parameters is disabled in the Parameters tab. Userconfiguration parameter such as velocity, acceleration and End of Runs canbe changed in the main tab. Other configuration parameters can be modifiedin the diganostics tab by using the commands. Refer to user’s manual fordetails of the commands.4.4AddressThe Address tab allows the followings:1)To scan and select connected FC series controllers.2)To configure the controller address4.4.1Controller pool setting“Discover” buttonThe Discover button scans to detect connected FC controllers (address #1 toaddress #4).After a Discover action, the list of detected controllers is filled. Stage modelnumber is shown next to the address #1 through #4. This address helps toidentify each controller connected.“Add” buttonThe Add button allows the user to add a connected FC controller to the list of selected controllers.After adding a detected controller, the list of selected controllers is updated.“Delete” buttonThe Delete button removes the selected FC controller from the list of selected controllers.4.4.2Controller address settingThis part allows the user to configure the address of the FC controller.“Set” buttonSelect a controller address from the list and press the “Set” button. Aprogress bar is displayed during the address configuration.Now disconnect this controller from your PC and connect the next one.Select a new, unallocated address and press the “Set” button again (proceedthe same way with all other controllers).4.4.3Daisy-chainingUp to 4 FC series controllers can be networked through the internal RS232communications link. Before daisy-chaining, the controller address of eachstage must be set separately. The FC controller that will be connected to thePC must have its controller address set to 1 and all subsequent stages musthave a different controller address set between 2 and 4.Once the controller address of each stage is set, unplug all the powercables and disconnect the USB cable from all the stages except for the FCcontroller that has its address set to 1. Use the daisy chain cables to connecteach controller. It does not matter whether you use the upper or lowerRS422 connector to daisy chain the stages.•Only the FC controller with address 1 should be connected to the PC•All other FC controllers must be daisy-chained.Plug in all the power supplies and open the GUI. Under the Address tabselect the Discover button to scan for connected FC’s. Once the scan iscomplete, discovered controllers will be added in “Detected controllers” list.Use the “Add” button to add controllers to the “Selected controllers” list.4.5DiagnosticsThe Diagnostics tab allows the user to enter instrument commands and toview the history of commands that were sent and the responses that werereceived. This list of commands and the syntax of each command can befound in the user’s manual.A file of commands can be sent line by line to the controller with the “SendCommand file” button.4.6AboutThe About tab displays the information about the GUI and the connectedinstrument. It displays the Controller GUI name, version, and copyrightinformation.It also displays the instrument model, the instrument key (serial number orCOM port), the firmware version and the list of the selected axes.Service FormYour Local RepresentativeTel.: __________________Fax: ___________________Name: _________________________________________________ Return authorization #: ____________________________________ Company:_______________________________________________ (Please obtain prior to return of item)Address: ________________________________________________ Date: __________________________________________________ Country: ________________________________________________ Phone Number: __________________________________________ P.O. Number: ____________________________________________ Fax Number: ____________________________________________ Item(s) Being Returned: ____________________________________Model#: ________________________________________________ Serial #: ________________________________________________Description: ________________________________________________________________________________________________________ Reasons of return of goods (please list any specific problems): ________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________North America & Asia Newport Corporation 1791 Deere Ave.Irvine, CA 92606, USA SalesTel.: (800) 222-6440e-mail:*****************Technical Support Tel.: (800) 222-6440e-mail:****************Service, RMAs & Returns Tel.: (800) 222-6440e-mail:*******************EuropeMICRO-CONTROLE Spectra-Physics S.A.S 9, rue du Bois Sauvage 91055 Évry CEDEX FranceSalesTel.: +33 (0)1.60.91.68.68 e-mail:******************Technical Supporte-mail:***********************Service & ReturnsTel.: +33 (0)2.38.40.51.55Visit Newport Online at: 。
fcpx参数

fcpx参数FCPX参数是指在使用Final Cut Pro X编辑软件时,可以调整的各种参数和选项。
本文将详细介绍FCPX的一些常用参数,帮助读者更好地使用这款编辑软件。
一、工程设置参数在开始使用FCPX进行编辑前,我们首先需要设置工程参数。
点击菜单栏中的“文件”,选择“新建工程”,弹出工程设置对话框。
在对话框中,我们可以设置工程的名称、存储位置、帧速率、视频格式等参数。
其中,帧速率决定了视频的流畅度,一般常用的有24、30和60帧每秒。
视频格式可以选择常见的MP4、MOV等格式,也可以根据具体需要选择其他格式。
二、导入媒体文件参数在进行视频编辑之前,我们需要将需要编辑的媒体文件导入到FCPX 中。
点击菜单栏中的“文件”,选择“导入媒体”,选择需要导入的文件,点击“导入”按钮即可。
在导入媒体文件时,FCPX会自动根据文件的格式和属性进行解码和转换,以便在编辑过程中更加流畅地播放和处理。
三、时间线参数时间线是视频编辑的核心部分,FCPX提供了丰富的时间线参数设置,使得编辑更加灵活和精确。
在时间线中,我们可以调整视频的剪辑顺序、添加特效、调整音频等。
点击菜单栏中的“窗口”,选择“时间线”可以打开时间线窗口,其中包含了一系列的参数和选项。
例如,我们可以设置视频的播放速度、添加转场效果、调整音频音量等。
四、效果参数FCPX提供了多种效果参数,可以让我们对视频进行各种特效处理。
点击菜单栏中的“窗口”,选择“效果浏览器”可以打开效果浏览器窗口,其中包含了各种特效效果。
例如,我们可以添加模糊效果、调整颜色饱和度、应用图像修复等。
通过调整这些效果参数,可以让视频更加生动、有趣和专业。
五、导出参数在编辑完成后,我们需要将视频导出为最终的文件格式。
点击菜单栏中的“文件”,选择“分享”可以打开导出设置窗口。
在导出设置窗口中,我们可以选择导出的文件格式、分辨率、码率等参数。
例如,我们可以选择导出为常见的MP4格式、分辨率为1080p、码率为10Mbps等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FC105、FC106参数设置中文说明
1、FC105
SCALE功能接受一个整型值(IN),并将其转换为以工程单位表示的介于下限和上限(LO_LIM和HI_LIM)之间的实型值。
将结果写入OUT。
SCALE功能使用以下等式:
OUT = [ ((FLOAT (IN) -K1)/(K2-1)) * (HI_LIM-O_LIM)] + LO_LIM
常数K1和K2根据输入值是BIPOLAR还是UNIPOLAR设置。
BIPOLAR:假定输入整型值介于 7648与27648之间,因此K1 = ,K2 = +
UNIPOLAR:假定输入整型值介于0和27648之间,因此K1 = ,K2 = +
如果输入整型值大于K2,输出(OUT)将钳位于HI_LIM,并返回一个错误。
如果输入整型值小于K1,输出将钳位于LO_LIM,并返回一个错误。
通过设置LO_LIM > HI_LIM可获得反向标定。
使用反向转换时,输出值将随输入值的增加而减小。
FC105参数
参数 ? ? ?说明 ? ? ?数据类型 ? ? ?存储区 ? ? ?描述
EN ? ? ?输入 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?使能输入端,信号状态为1时激活该功能。
ENO ? ? ?输出 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?如果该功能的执行无错误,该使能输出端信号状态为1。
IN ? ? ?输入 ? ? ?INT ? ? ?I、Q、M、D、L、P、常数 ? ? ?欲转换为以工程单位表示的实型值的输入值。
HI_LIM ? ? ?输入 ? ? ?REAL ? ? ?I、Q、M、D、L、P、常数 ? ? ?以工程单位表示的上限值。
LO_LIM ? ? ?输入 ? ? ?REAL ? ? ?I、Q、M、D、L、P、常数 ? ? ?以工程单位表示的下限值。
BIPOLAR ? ? ?输入 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?信号状态为1表示输入值为双极性。
信号状态0表示输入值为单极性。
OUT ? ? ?输出 ? ? ?REAL ? ? ?I、Q、M、D、L、P ? ? ?转换的结果。
RET_VAL ? ? ?输出 ? ? ?WORD ? ? ?I、Q、M、D、L、P ? ? ?如果该指令的执行没有错误,将返回值W#16#0000。
对于W#16#0000以外的其它值,参见"错误信息"。
错误信息
如果输入整型值大于K2,输出(OUT)将钳位于HI_LIM,并返回一个错误。
如果输入整型值小于K1,输出将钳位于LO_LIM,并返回一个错误。
ENO的信号状态将设置为0,RET_VAL等于W#16#0008。
实例
如果输入的信号状态为1 (激活),则执行SCALE功能。
在本例中,整型值22将转换为介于和之间的实型值,并写入OUT。
如的信号状态所示,该输入值为BIPOLAR。
如果该功能的执行没有错误,ENO和的信号状态将设置为1,RET_VAL等于W#16#0000。
此主题相关图片
2、FC106
UNSCALE功能接收一个以工程单位表示、且标定于下限和上限(LO_LIM和HI_LIM)之间的实型输入值(IN),并将其转换为一个整型值。
将结果写入OUT。
UNSCALE功能使用以下等式:
OUT = [ ((IN-O_LIM)/(HI_LIM-O_LIM)) * (K2-1) ] + K1
,并根据输入值是BIPOLAR还是UNIPOLAR设置常数K1和K2。
BIPOLAR:假定输出整型值介于 7648和27648之间,因此,K1 = ,K2 = + UNIPOLAR:假定输出整型值介于0和27648之间,因此,K1 = ,K2 = +
如果输入值超出LO_LIM和HI_LIM范围,输出(OUT)将钳位于距其类型(BIPOLAR或UNIPOLAR)的指定范围的下限或上限较近的一方,并返回一个错误。
FC106参数
参数 ? ? ?说明 ? ? ?数据类型 ? ? ?存储区 ? ? ?描述
EN ? ? ?输入 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?使能输入端,信号状态为1时激活该功能。
ENO ? ? ?输出 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?如果该功能的执行无错误,该使能输出端信号状态为1。
IN ? ? ?输入 ? ? ?REAL ? ? ?I、Q、M、D、L、P、常数 ? ? ?欲转换为整型值的输入值。
HI_LIM ? ? ?输入 ? ? ?REAL ? ? ?I、Q、M、D、L、P、常数 ? ? ?以工程单位表示的上限。
LO_LIM ? ? ?输入 ? ? ?REAL ? ? ?I、Q、M、D、L、P、常数 ? ? ?以工程单位表示的下限。
BIPOLAR ? ? ?输入 ? ? ?BOOL ? ? ?I、Q、M、D、L ? ? ?信号状态1表示输入值为双极。
信号状态0表示输入值为单极。
OUT ? ? ?输出 ? ? ?INT ? ? ?I、Q、M、D、L、P ? ? ?转换结果。
RET_VAL ? ? ?输出 ? ? ?WORD ? ? ?I、Q、M、D、L、P ? ? ?如果该指令的执行没有错误,将返回值W#16#0000。
对于W#16#0000以外的其它值,参见"错误信息"。
错误信息
如果输入值超出LO_LIM和HI_LIM范围,输出(OUT)将钳位于距其类型(BIPOLAR或UNIPOLAR)的指定范围的下限或上限较近的一方,并返回一个错误。
ENO的信号状态将设置为0,RET_VAL等于W#16#0008。
实例
如果输入的信号状态为1 (激活),则执行UNSCALE功能。
在本例中,标定于和之间的实型值,将转换为一个整型值,并写入OUT。
如的信号状态所示,该输入值为BIPOLAR。
如果该功能的执行没有错误,ENO和的信号状态将设置为1,RET_VAL等于W#16#0000。
此主题相关图片。