海德汉_旋转编码器说明书
海德汉编码器
旋转编码器2013年11月2带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮有关所有可用接口和一般电气信息, 参见海德汉编码器接口样本, ID 1078628-xx。
以下产品信息 •伺服驱动编码器 •内置轴承角度编码器 •无内置轴承角度编码器 •模块式磁栅编码器•直线光栅尺用于NC数控机床 •敞开式直线光栅尺 •接口电子系统 •海德汉数控系统 •海德汉编码器接口欢迎索取,或访问目录选型指南标准用途的旋转编码器内部5/10倍细分后最大36 000个信号周期(如果需要更高细分倍数,可提供)2) 供电电压10 V至30 V DC4要概2838ERN 480000至5 000线445标准用途的旋转编码器内部倍频细分后最大周期数为10 0002) 内部5/10倍细分后最大36 000个信号周期(如果需要更高细分倍数,可提供)3) 供电电压10 V至30 V DC646 56 60 7电机旋转编码器8 内部2倍细分后192个信号周期 内部5/10/20/25倍细分后37 500个信号周期89特殊用途的旋转编码器68伺服驱动编码器12测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有 •在玻璃上镀硬铬线 •在镀金钢带上蚀刻线条•在玻璃或钢材基体上蚀刻三维结构图案海德汉公司开发的光刻工艺生产的栅距典型值为50µm 至4µm 。
德国heidenhain海德汉编码器

德国heidenhain海德汉编码器主要作用它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果德国heidenhain海德汉编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
德国heidenhain海德汉编码器产生电信号后由数控制置CNC.可编程逻辑控制器P1.C、控制系统等来处理。
这些传感器主要应用在以下方面:机床、材料加工、电动机反应系统以及测量和控制设备。
在E1.TRA德国heidenhain海德汉编码器中角位移的转换采用了光电扫描原理。
读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。
此系统全部用一个红外光源垂直照射,这样光就把盘子上的图像投射到接收器表面上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘一样的窗口。
接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。
一般地,旋转德国heidenhain海德汉编码器也能得到一个速度信号,这个信号要反应给变频器,从而调节变频器的输出数据。
故障现象:1、旋转德国heidenhain 海德汉编码器坏(无输出)时,变频器不能正常工作,变得运行速度很慢,而且一会儿变频器保护,显示“PG断开”.・・联合动作才能起作用。
要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用电子电路来处理。
德国heidenhain海德汉编码器pg接线与参数矢量变频器与德国heidenhain海德汉编码器pg之间的连接方式,必须与德国heidenhain海德汉编码器pg的型号相对应。
一般而言,德国heidenhain海德汉编码器Pg 型号分差动输出、集电极开路输出和推挽输出三种,其信号的传递方式必须考虑到变频器p g卡的接口,因此选择合适的pg卡型号或者设置合理.德国heidenhain海德汉编码器一般分为增量型与型,它们存着的区别:在增量德国heidenhain海德汉编码器的情况下,位置是从零位标记开始计算的脉冲数量确定的,而型德国heidenhain海德汉编码器的位置是由输出代码的读数确定的。
海德汉伺服驱动编码器

2014年11月伺服驱动编码器有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本,ID 1078628-xx。
本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
本样本不是海德汉公司全线产品的介绍。
只适用于选择伺服驱动编码器。
选型表是关于海德汉公司所有电机驱动编码器的概要信息以及最重要的技术参数信息。
技术特性说明是关于电机驱动旋转编码器、角度编码器和直线光栅尺的基本信息。
有关安装信息和详细技术参数,参见专为驱动技术开发的旋转编码器。
其它旋转编码器信息,参见其单独产品样本。
有关选型表中直线光栅尺和角度编码器的安装、技术参数和尺寸信息,详见相应的产品样本。
样本旋转编码器产品概要电梯行业的旋转编码器样本直线光栅尺用于NC数控机床样本敞开式直线光栅尺产品概要应用于有爆炸危险环境中的旋转编码器样本内置轴承角度编码器样本无内置轴承角度编码器样本模块式磁栅编码器August 2012Längenmessgerätefür gesteuerteWerkzeugmaschinen März 2012OffeneL Januar 2009ProduktübersichtDrehgeberfür explosionsgefährdeteBereiche (ATEX)August 2013Winkelmessgerätemit EigenlagerungSeptember 2012MagnetischeE目录4伺服驱动编码器伺服驱动的控制系统需要测量系统提供位置和速度控制单元所需的反馈信息和电子换向信号。
编码器性能对电机的重要特性具有决定性影响,例如: •定位精度 •速度稳定性•带宽,它决定对驱动指令信号的响应速度和抗干扰性能 •功率损失 •尺寸 •噪音 •安全数字位置和速度控制系统海德汉公司为旋转电机和直线电机提供所需的全面产品:•带或不带换向刻轨的增量式旋转编码器和绝对式旋转编码器 •增量式和绝对式角度编码器 •增量式和绝对式直线光栅尺 •增量式模块型编码器旋转编码器5旋转编码器“数字”驱动系统的电机(数字位置和速度控制)本样本中的所有海德汉编码器都具有方便电机制造商安装和接线的特点,而且安装和接线成本低。
1海德汉中文使用说明书

1前言1.1TNC 426,TNC 430HEIDENHAIN TNC是一种面向生产车间的仿型控制器,使您能以一种便于使用的对话式编程语言,编制使机床准确加工运转的对话式程序。
TNC控制器可用于铣削、钻孔和镗削加工,也可用于加工中心。
TNC 426最多可控制五根轴;TNC 430最多可控制九根轴。
您也可在程序控制下改变主轴的角度位置。
一体化的硬盘能存储许多您所喜欢的程序,不论这些程序是脱机创建的还是数字化的。
为了能快速计算,随时随地都能在屏幕上调出袖珍计算器。
键盘和屏幕布局清晰合理,功能调用快捷,使用方便。
编程:HEIDENHAIN对话式和ISO格式HEIDENHAIN对话式编程是一种特别容易的程序写入方法,交互式的图形表示仿型编程的各个加工步骤。
如果某一张生产图纸没有标注NC适用的尺寸,HEIDENHAIN FK任意形状轮廓编程就会自动执行必要的计算。
工件的加工状况,无论是现在正在加工中还是在加工之前,都能用图形模拟显示。
在ISO编程格式或DNC模式中都由此功能。
当TNC在运行另一段程序时,您也可输入或测试一段程序。
兼容性TNC能执行所有写在TNC 150B及以后的HEIDENHAIN控制器上的零件程序。
21.2可视显示器和键盘可视显示器TNC显示器可使用CRT彩色显示器(BC120)或TFT液晶显示器(BF120)。
右上图为BC120的键盘和控制器,右中图为BF120的键盘和控制器。
屏幕端部当TNC接通电源时,屏幕端部显示选定的操作方式:左侧为加工方式,右侧为编程模式。
当前激活的模式显示在一个较大的方框中,在此方框中,同时也显示对话提示和TNC信息(如果没有,则仅显示图形)。
软键TNC底部一排软键表示辅助功能。
直接按下这些键,即可选用这些辅助功能。
紧接着软键行上面的行表示软键的编号,可以左右移动黑色光标调用。
被激话的软键行高亮显示。
软键选择键切换软键行设置屏幕布局用于转换加工和编程模式的移位键仅在BC120上的键屏幕退磁:为屏幕设置退出主菜单为屏幕设置选择主菜单:⏹在主菜单中:高亮显示部向下移动⏹在子菜单中:减小数值;图形向左或向下移动⏹在主菜单中:选择子菜单⏹在子菜单中:退出子菜单主菜单对话功能BRIGHTNESS 调节亮度CONTRAST 调节对比度H-POSITION 调节水平位置3主菜单对话功能V-POSITION 调节图形高度V-SIZE 调节图形高度SIDE-PIN 纠正桶型失真TRAPEZOID 纠正梯形失真ROTATION 纠正倾斜COLOR TEMP 调节色温R-GAIN 调节红色浓度B-GAIN 调节兰色浓度RECALL 无功能BC120对磁场和电噪声敏感,可能会使图形的位置和几何形状产生失真。
4-3海德汉中文使用说明书

4.5创建和编写程序HEIDENHAIN对话式格式的NC程序.结构一个零件程序由一连串的程序行组成。
右图表示程Array序行的组成。
TNC按上升的顺序对程序行编号。
程序的第一行用BEGIN PGM、程序名和当前的测量单位识别。
以后的行包含下列信息:⏹工件间隔⏹刀具定义,刀具调用⏹进给率和主轴转速,还有⏹仿型路径、循环和其他功能程序的最后一行用END PGM、程序名和当前的测量单位识别。
定义空格:BLK FORM紧接着新的程序建立以后,您定义一个长方体的工件空格。
如果您要定义下一级的空格,按下BLK FORM软键。
这个定义是TNC的图形模拟功能所必需的。
工件空格的两侧类似于X,Y和Z轴,最长可为100 000mm长。
空格由两个角位置来定义:⏹MIN(最小)点:,空格的X,Y和Z座标的最小值,按绝对座标值输入。
⏹MAX(最大)点:空格的X,Y和Z座标的最大值,按绝对座标值或者增量座标值输入。
☞只有您要进行程序的图形测试时,才需定义空格。
创建一个新的零件程序您总是要在运转的编程和编辑模式输入零件程序的。
以一个例子说明程序的开始:选择运转的编程和编辑模式。
调用文件管理器:按下PGM MGT 软键。
选择您要储存新的程序的目录:文件名= OLD.H输入新的文件名,用ENT键确认。
按下MM键或者INCH键,选择测量单位。
TNC变换屏幕布局并开始定义BLK FORM的对话。
工作主轴轴线X/Y/Z?输入主轴轴线。
定义BLK FORM:最小角?按顺序输入X,Y,Z的最小角座标。
-40定义BLK FORM:最大角?100按顺序输入X,Y,Z的最大角座标。
100实例:在NC程序中显示BLK 空格程序开始,名称,测量单位刀具轴线,最小点座标最大点座标程序结束,名称,测量单位TNC自动生成程序行行号,包括BEGIN和END行在内。
如果您不要定义空格,按下DEL键,在工作主轴轴线X/Y/Z?时取消对话!如果BLK FORM的短边和长边的比例超过1:64,则TNC只显示图形。
6-2海德汉中文使用说明书
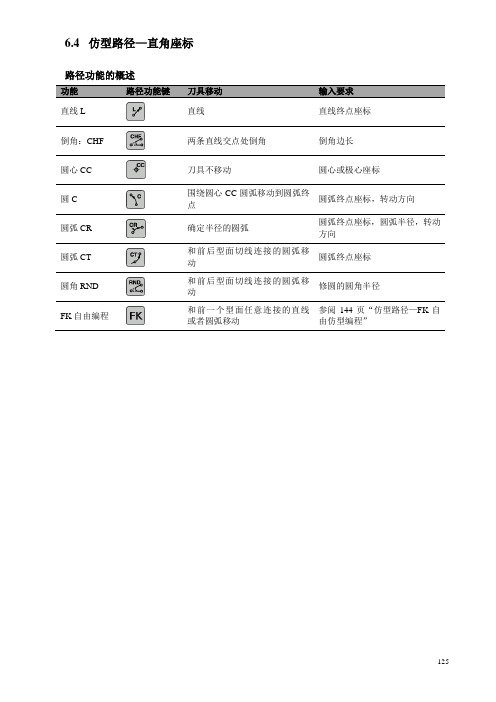
1256.4 仿型路径—直角座标路径功能的概述直线L 直线直线终点座标倒角:CHF 两条直线交点处倒角 倒角边长圆心CC 刀具不移动圆心或极心座标圆C 围绕圆心CC 圆弧移动到圆弧终点圆弧终点座标,转动方向圆弧CR 确定半径的圆弧圆弧终点座标,圆弧半径,转动方向圆弧CT 和前后型面切线连接的圆弧移动圆弧终点座标 圆角RND 和前后型面切线连接的圆弧移动修圆的圆角半径FK 自由编程和前一个型面任意连接的直线或者圆弧移动参阅144页“仿型路径—FK 自由仿型编程”126 直线L刀具沿着直线从当前位置移动到直线结束点,该直线的起始点为前一行程序的结束点。
直线结束点的座标必要时进一步输入: 半径补偿RL/RR/R0 进给率F 辅助功能MNC 程序实例实际位置归零您也可用ACTUAL-POSITION-CAPTURE (实际位置归零)键建立直线程序行:在手动操作模式中,把刀具移动到您要归零的位置上。
屏幕显示切换到编程和编辑。
选定您要插入L 程序行位置的前一程序行。
按下实际位置归零键:TNC 用当前的实际位置的座标建立一行程序。
,在MOD 功能中,规定保存在L 程序行中的轴的数量(参阅398页“MOD 功能)。
在两条直线之间插入倒角CHF倒角功能可以使您切去两条直线交点处的尖角。
⏹CHF前后的程序行必须是在同一个平面中的。
⏹CHF前后的半径补偿必须相同。
⏹内倒角必须足够大,以能容纳在用的刀具。
倒角边长:倒角长度必要时进一步输入:进给率F(只在CHF程序行中有效)。
NC程序行实例☞您不能用CHF程序行开始仿型。
倒角只能在加工面中。
尖角被修平,不作为轮廓的一部分。
CHF程序行中编程的进给率只对该程序行有效,在CHF程序行以后,原先编程的进给率恢复有效。
127圆角RND刀具在和前后两个仿型点相切的圆弧上移动。
修圆圆弧必须足够大以容纳刀具。
必要时进一步输入:进给率F(只对RND程序行有效)NC程序行实例前后两个仿型点的座标必须位于修圆的圆弧的平面中,如果您进行无半径补偿仿型加工,您必须编制加工面中的两个座标的程序。
海德汉编码器和海德汉光栅尺使用的各种参数

如果两个值或参数相等,转移至给定的
GOTO
标签。
FN10:WENN UNGLEICH,SPRUNG
FN10
z.B. FN10: IF+10 NE -Q5 GOTO LBL 10 IF X NE Y
如果两个值或参数不相等,转移至给定
GOTO
的标签。
FN11:WENN GROESSER,SPRUNG
FN11
F-PRINT
FN18:SYS-DATUM READ
FN18
读出数据系统
SYS-DRTUM
READ
FN19:PLC 数据传送到 PLC
FN19 PLC=
FN20:WAIT FOR
FN20
NC 和 PLC 同步
WAIT
FOR
FN25:PRESET
FN25
设置新的数据
SET
DATUM
FN26:TABOPEN 打开可任意定义的表格
FN7
z.B. FN7: Q21 = COS-Q5
COS(X)
计算一个角的余弦角度(º)并将其赋
值给参数。
FN8:WURZEL AUS QUADRATSUMME z.B. FN8: Q10 = +5 LEN +4
FN8 X LEN Y
从两个值中计算长度。
FN13:WINKEL z.B. FN13: Q20 = +10 ANG-Q1
Q100 到 Q199
主要用于循环的参数,适用于所有存 Q200 到 Q399
储在 TNC 内存中的程序
编程说明
在一个程序中可以混用 Q 参数和固定数字值。 Q 参数可以被指定给-99.999,9999 和+99 999.9999 之间的 数字值。TNC 可以计算十进制小数点前 57 位到小数点后 7 位的范围(32 位数据的计算范围相当于十进制数值 4 294 967 296)。
海德汉系列旋转编码器的安装及拆卸方法

海德汉系列旋转编码器的安装及拆卸方法
海德汉编码器与安装主轴之间是通过锥度为1:10的锥轴与锥孔进行连接。
以下操作必须在曳引机断电的情况下进行。
【一】安装
1. 首先选用正确规格的编码器。
并检查编码器是否转动灵活,以灵活无杂音为好。
2. 使用清洁的细布把编码器的锥轴和安装主轴的锥孔擦拭干净,并检查锥孔及锥轴的配合表面有无毛刺和凸起的高点,如果有请用细砂纸将其打磨掉,但不要大面积打磨以致于破坏锥度配合面,打磨后请使用清洁的细布重新进行清洁处理,必须保证锥度配合面的清洁,否则将严重影响安装质量。
3. 手持编码器的大端锥轴,向里把编码器推进,使锥轴与锥孔紧密结合,然后把编码器外壳中间的M10沉头螺栓旋下,这时可看到一个M5内六方螺栓,把这个螺栓拧紧,但必须注意用力不可太大,最大力不要超过5Nm,以防把内六方拧坏,最后把最外圈的M2.5的内六方螺栓拧紧,使编码器的外圈涨紧,手持编码器外壳施加一定的力转一下,如不能转动,说明编码器安装牢固,安装工作完成。
【二】拆卸
1. 首先把编码器旋编线从编码器上轻轻拔下。
2. 把编码器最外圈的M2.5的内六方螺栓松开但不要拧下来,这时编码器应该能够灵活转动,如不能转动则继续松M2.5螺栓,直到编码器能够灵活转动为止。
把编码器中间的M5内立方螺栓松两圈但不要卸下来,用一个M10的螺栓拧进中间的螺纹孔内,然后施加一定的力拒拧紧M10螺栓,当达到一定力时编码器会猛然一动,这时编码器的锥轴已经与安装主轴的锥孔脱离,把M10的螺栓旋下再把中间的M5内六方螺栓旋出,手持编码器边旋转边向外移动就可把编码器轻轻卸下。
海德汉说明书(模板)

海德汉说明书海德汉说明书篇一:海德汉说明书HEI DEN HAI N T NC426TNC430软件编号280-476XX 280-477X X 使用说明书对话式编程可视显示器上的控制器分割屏幕切换加工和编程模式屏幕上选择功能的软键变换软键行改变屏幕设置(仅B C120)输入字符的键盘文件名称注解 IS编程机床运转模式手动操作方式电控手轮M DI定位单行程序运行全序列程序运行编程模式编程和编辑试运行程序/文件管理,TN C功能选择或删除程序和文件,外部数据传送在程序中输入程序调用命令M D功能显示NC出错信息帮助文本袖珍计算器移动光标,直接指向程序行、循环和参数功能移动高亮显示部直接转到程序行、循环和参数功能进给率和主轴转速修调旋钮编程路径移动仿型进刀和退刀FK自由仿型编程直线圆心和极座标极心定圆心圆定半径圆切线连接圆弧倒角修圆尖角刀具功能输入和调用刀具长度和半径循环、子程序和程序段重复定义和调用循环输入和调用子程序及程序段重复的标签程序中程序停止运行在程序中输入触头功能座标轴和数字,编辑选择座标轴或在程序中输入? 座标轴? 数字键小数点改变代数符号极座标增量座标Q参数实际位置归零跳过对话提问,删除字确认输入和恢复对话结束程序行清除数字输入或者TNC出错信息中断对话,删除程序段 TN C 型号,软件和性能本说明书按照下述NC软件编号,叙述了T NC提供的功能和特性。
海德汉公司MRP系列角度编码器模块说明书

角度编码器模块05/20212海德汉公司的MRP系列角度编码器模块由角度编码器和高精度轴承组成,并已调整至理想状态。
该模块启动扭矩极小,拥有高测量精度、高导向精度、极高分辨率、优异的重复精度和运动平滑性。
模块式的结构设计和整体进行测试,因此,这款角度编码器模块易于运输和安装。
以下信息••内置轴承角度编码器和••海德汉接口电子电路欢迎索取,或访问海德汉官网• 。
结构和应用SRP角度编码器模块还内置了力矩电机。
也就是在小巧紧凑的一个模块中集成了•电机、高精度轴承和超高精度编码器。
本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
有关产品所遵循的标准(ISO,EN等)仅以样本中的标注为准。
目录45可重复的导向精度:轴承的决定性特性气浮轴承在空载时的绝对导向精度通常优于滚动轴承的导向精度。
然而,在许多应用中,重要的是轴承最高可重复的导向精度。
在此方面,海德汉角度编码器模块是替代气浮轴承转轴的理想选择。
这是因为海德汉滚动轴承拥有极高的重复精度,而且海德汉滚动轴承的刚性高于气浮轴承至少10倍。
因此,海德汉滚动轴承是受力轴应用的高精度解决方案。
此外,滚动轴承通常对冲击载荷不敏感,而且不需要可调节的压缩空气,因此工作更可靠和更易于使用。
应用领域适用于角度编码器模块的应用范围包括:中低转速运动和中等负载的高导向精度到超高导向精度和极高重复精度应用。
特别能满足计量应用的独特要求。
因此,典型应用包括:计量仪器、测量机的高精度回转工作台和电子工业的圆晶运送机。
角度编码器模块甚至也能用于小负载机床,例如电加工机床或激光加工机床。
晶片运送紧凑型摆动装置高精度回转工作台激光跟踪仪实用的解决方案海德汉角度编码器模块中的轴承可根据客户的特定要求适配。
按照要求相应和分别调整预紧量、润滑、接触角和材质。
更多信息,请与海德汉联系。
•测量精度和方位精度海德汉角度编码器模块整个组件的精度取决于内置角度编码器的测量精度和滚动轴承的导向精度。
6-1海德汉中文使用说明书
NC程序行实例
最后的仿型点:有半径补偿的PE
24 DEP CT CCA 180 R+8 R0 F100
圆心角=1800
圆弧半径=10mm
25 L Z=100 FMAX M2
在Z轴上缩回。回到程序行1,结束程序
沿和轮廓相切的圆弧和直线退刀:DEP LCT
刀具在圆弧上从最后的仿型点PS移动到辅助点PH,然后沿着直线移动到结束点PN。该圆弧既和最后的仿型点相切又和PH-PN直线相切。一旦这些直线已知,半径R就足以完全定义刀具路径。
在仿型进刀时,在起始点PS和第一个仿型点PA之间要有足够的距离,以保证TNC能达到编入程序的加工进给率。
TNC按最后编程的进给率把刀具从实际位置移动到辅助点PH。
半径补偿
刀具半径补偿是和第一个仿型点一起在APPR程序行中编程的。DEP程序行自动取消刀具半径补偿。
无半径补偿的仿型进刀:如果您用R0编制APPR程序行,TNC将计算半径为0,半径补偿RR的刀具路径!在APPR/DEP LN和APPR/DEP CT功能中,设置仿型进刀和退刀的方向必须要有半径补偿。
用APPR/DEP键和DEP LN软键开始编程对话。
LEN:输入距最后一个仿型点PN的距离。
LEN始终按正值输入。
NC程序行实例
最后一个仿型元素:半径补偿的PE
24 DEP LN LEN+20 F100
垂直仿型退刀,距离LEN=20mm
25 L Z+100 FMAX M2
刀具在Z轴中缩回,回到程序行1,程序结束
刀具保持Z轴座标,在XY平面上移动到X=70,Y=50的位置。
三维移动
程序行包含三个座标,TNC使刀具在空间移动到编程位置。
2海德汉中文使用说明书

2手动操作和调整2.1电源接通,电源切断电源接通电源接通和移动到基准点在每台机床上可能有所不同,参考您的机床说明书。
接通控制器和机床的电源,TNC自动开始下列对话:存储器测试自动检查TNC存储器。
除此信息。
编译PLC程序自动编译TNC的PLC程序。
紧急停止电路的功能。
点:在每一轴时按下机床的START按钮,或者按任意顺序越过基准点:在行到基准点之前一直按住机床轴方向按钮。
现在TNC已为手动操作方式准备就绪。
☞如果移动机床轴才需要行到基准点。
如果您只是编写、编辑和试验程序,您可以在控制器电源接通以后立即选择编程和编辑模式或者试运行模式。
在手动操作方式中按PASS OVER REFERENCE(越过基准点)软键后即可行到基准点。
在倾斜的加工面中行程行到基准点在倾斜座标系中按下机床轴方向按钮可以移动到基准点。
在手动操作方式中必须激活“倾斜加工面功能”,参阅27页“激活手动倾斜”,TNC就增添相应的轴。
NC START按钮不起作用,按下此按钮可能会引起出错。
☝要确保倾斜加工面菜单中输入的角度和倾斜轴的实际角度相匹配。
电源切断为防止电源切断时数据丢失,您必须按下述使操作系统一步步停止工作:选择手动方式。
选择渐停功能,用YES软键再次确认。
当TNC在一叠加的窗口中显示“Now you can switch off theTNC”信息时,您才可以切断TNC的电源。
☞电源切断动作不准确,会使TNC 数据丢失。
2.2移动机床轴说明用机床轴方向按钮移动机床轴是机床固有的功能,在机床说明书中有详细的资料。
用机床轴方向按钮移动:选择手动操作方式。
按下并保持住机床轴方向按钮,直至您所要的机床轴开始移动。
连续移动机床轴:按下并保持住机床轴方向按钮,然后按下机床START按钮。
和要停止机床轴移动,按下STOP按钮。
利用这两个方法,您可以一次同时移动几根轴。
利用F软键,可以修改被移动轴的进给率,参见21页“主轴转速S,进给率F和辅助功能M”。
德玛吉海德汉系统操作说明书-卓越教学手册

3.3.2旋转编码器

图3-13所示为一卧式加工中心机床参考点相对机床工作台中心位置的示意图, 图3-14所示为回参考点的一种实现方式。
图3-14 回参考点方式 a)挡块位置 b)回参考点控制 1-左限位挡块及行程开关 2-工作台 3-减速挡块及 行程开关 4-右限位挡块及行程开关 5-编码器 6-伺服电动机
图3-13 卧式加工中心参考点
测量代码,因此这种测量方式即使断电也能读出被测轴的角度位置,即具有断电记忆功能。 (1)接触式码盘 图3-8a所示为接触式码盘示意图。
a)结构简图 b)4位二进制码盘 c)4位格雷码盘
图3-8b为4位二进制码盘。它在一个不导电基体上做成许多金属区使其导电,其中涂黑 部分为导电区,用“1”表示;其它部分为绝缘区,用“0”表示。这样,在每一个径向上, 都有由“1”、“0”组成的二进制代码。最里一圈是公用的,它和各码道所有导电部分连在 一起,经电刷和电阻接电源正极。除公用圈以外,4位二进制码盘的四圈码道上也都 装有电刷,电刷经电阻接地,电刷布置如图3-8a所示。由于码盘是与被测转轴连在 一起的,而电刷位置是固定的,当码盘随被测轴一起转动时,电刷和码盘的位置发生
式中ν是切削线速度;D为工件的切削直径,随刀具进给不断变化;n为主轴转速; D由坐标轴的位移检测装置,如光电编码器检测获得。上述数据经软件处理后 即得主轴转速n,转换成速度控制信号后至主轴驱动装置。 3)主轴定向准停控制 准停实现的三种方式将在第四章中详细介绍。其中可采用编码器,如图3-12所示。 通过安装在主轴上的编码器,主轴定向位置可在0°~359.9°内任意设定。
实际应用的光电编码器的光栏板上有两组条纹A、Ā和B、B, 每组条纹的间隙与
光电码盘相同,而A组与B组的条纹彼此错开1/4节距,
两组条纹相对应的光电元件所产生的信号彼此相差90°相位,用于辨向。 当光电码盘正转时,A信号超前B信号90°,当光电码盘反转时,B信号超前A信 号90°,数控系统正是利用这一相位关系来判断方向的。
3海德汉中文使用说明书

3 手动数据输入定位3.1简单加工操作的程序编写和执行手动数据输入操作方式特别适用于简单加工操作和刀具的预定位。
该方式能使您用HEIDENHAIN对话式编程方法或者用ISO格式编写一段短程序并立即执行它。
您也能够调用TNC循环。
程序储存在$MDI文件中。
再用MDI定位的操作方式中,辅助状态显示也能被激活。
手动数据输入定位(MDI)选择操作的MDI定位方式,按您的要求编写程序文件$MDI。
按下机床START按钮,开始程序运行。
限制不能使用FK任意轮廓编程、图形编程和程序运行图形。
$MDI文件不得包含程序调用命令(PGMCALL)。
例1:在一个工件上钻一个深度为20mm的孔。
当工件被夹紧并校准好、设置好座标原点以后,您即可开始编制几行程序并进行钻孔操作。
首先,在L程序块中把刀具预定位在孔中心座标上方,距工件表面5mm。
然后可以用循环1 PECKING(啄式钻孔)进行钻孔操作。
0 BEGIN PGM $MDI MM1 TOOL DEF 1 L+0 R+52 TOOL CALL 1 Z 520003 L Z+200 RO F MAX4 L X+50 Y+50 RO F MAX M35 L Z+5 F 20006 CYCL DEF 1.0 PECKING7 CYCL DEF 1.1 SET UP 58 CYCL DEF 1.2 DEPTH -20 定义刀具:零点刀具,半径5。
调用刀具:Z刀具轴线。
主轴转速,2000 rpm。
刀具缩回(F MAX=快速行程)。
刀具以快速行程移到孔上方。
主轴开。
刀具定位到孔上方5mm处。
定义PECKING循环。
设置刀具在孔上方的间隔。
309 CYCL DEF 1.2 PECKG 1010 CYCL DEF 1.4 DWELL 0.511 CYCL DEF 1.5 F 25012 CYCL CALL13 L Z+200 RO F MAX M214 END PGM $MDI MM直线功能程序块L(参阅126页“直线L”),啄式钻孔循环(参阅195页“啄式钻孔(循环1)”)。
5海德汉中文使用说明书

5编程:刀具5.1输入刀具相关数据进给率F进给率F是刀具中心移动的速度,单位为mm/分钟或英寸/分钟。
每一个轴的最大进给率可以是不同的,在机床参数中设置。
输入您可以在刀具调用程序行和每个定位程序行中输入进给率(参阅117页“用路径功能键建立程序行”)。
快速行程如果您要编制快速行程程序,输入F MAX。
要输入F MAX,在对话提示Feed rate(进给率)F=?出现在屏幕上以后即按下ENT键或者F MAX软键。
有效持续性按数字值输入的进给率在程序行执行到不同的进给率之前一直保持有效。
F MAX只有被编入程序行才起作用。
当有F MAX的程序行被执行以后,进给率即返回到之前最后一次设定的进给率数值。
在程序运行期间改变进给率在程序运行期间您可用进给率修调旋钮改变进给率。
主轴转速S在TOOL CALL程序行中主轴转速是按每分钟转数(rpm)输入的。
编程修改在零件程序中,您可以只输入主轴转速来修改TOOL CALL程序行中的主轴转速参数:编制刀具调用命令:按TOOLCALL键。
用NO ENT键忽略Toolnumber?(刀号)对话提问。
用NO ENT键忽略Workingspindle axis X/Y/Z ?(工作主轴轴线)对话提问。
在对话提问Spindle speed S=?(主轴转速)时输入新的主轴转速,用END键确认。
在程序运行时修改在程序运行期间您可用进给率修调旋钮改变主轴转速。
845.2刀具数据刀具补偿要求您通常是按工件图上的尺寸编制仿型路径程序的。
要使TNC能计算刀具中心路径,例如刀具补偿,您必须同时输入使用的每一把刀具的长度和半径。
刀具数据输入可以直接在零件程序中用TOOL DEF键输入或者在刀具表中单独输入。
在刀具表中,也可以输入指定刀具的附加数据。
在执行零件程序时,TNC会考虑输入的全部刀具数据。
刀号和刀具名称每一把刀具是根据编号来识别的,编号范围为0-254。
如果您正在用刀具表加工,您可以使用较大的编号,也可以输入每一把刀具的名称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转编码器2012年11月带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮2目录选型指南标准用途的旋转编码器供电电源3.6至5.25 V DC2) 内部2倍频细分后最大至10 000个信号周期数3) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)42634 ERN 480000至5 000线405选型指南标准用途的旋转编码器内部2倍频细分后最大周期数为10 0002) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)642 50 54 7选型指南电机旋转编码器内部2倍频细分后8 192个信号周期2) 内部5/10/20/25倍频细分后37 500个信号周期8参见产品信息910供电电源3.6至5.25 V DC2)内部2倍频细分后最大至10 000个信号周期数3)内部2倍频细分后8 192个信号周期4)根据用户要求,可提供盲孔轴版选型指南特殊用途的旋转编码器40请见产品概要:应用于电梯行业的旋转编码器请见产品概要:11测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有:•在玻璃上镀硬铬线•在镀金钢带上蚀刻线条,或者•在玻璃或钢材基体上蚀刻三维结构图案。
海德汉公司开发的光刻工艺生产的栅距典型值为50 µm至4 µm。
这些光刻工艺制作的光栅栅距非常小,而且线条边缘清晰和均匀。
再加上光电扫描法,这些边缘清晰的刻线是输出高质量信号的关键。
母版光栅采用海德汉公司定制的精密刻线机制造。
采用感应扫描原理的编码器为铜/镍光栅。
这种光栅刻在印刷电路板的基体材料上。
绝对测量法是指编码器通电时就可立即得到位置值并随时供后续信号处理电子电路读取。
无需移动轴执行参考点回零操作。
绝对位置信息由圆光栅码盘的光栅读取,这个光栅由系列编码的线条或如ECN 100由多条平行光栅轨组成。
用单独的增量信号轨(ECN 100编码器栅距更小的光栅轨)通过细分提供位置值,并同时生成可选的增量信号。
单圈编码器的绝对位置值信息每转一圈重复一次。
多圈编码器的每圈位置信息都不相同。
绝对式旋转编码器的圆光栅码盘增量测量法的光栅由周期性的栅状线条组成。
位置信息通过计算自某个原点开始的增量数(测量步距数)获得。
由于必须用绝对参考点确定位置值,因此圆光栅码盘还有一个参考点轨。
参考点确定的绝对位置值可以精确到一个测量步距。
因此,必须通过扫描参考点建立绝对基准点或确定上次选择的原点。
增量式旋转编码器的圆光栅码盘12扫描方法光电扫描大多数海德汉公司光栅尺或编码器都用光电扫描原理。
对测量基准的光电扫描为非接触扫描,因此无磨损。
这种光电扫描方法能检测到非常细的线条,通常不超过几微米宽,而且能生成信号周期很小的输出信号。
ECN,EQN,ERN和ROC,ROQ,ROD 系列旋转编码器采用成像扫描原理。
简单地说成像扫描原理是用透射光生成信号: 两个具有相同栅距的光栅—圆光栅码盘与扫描掩膜—彼此相对运动。
扫描掩膜为透明基体。
测量基准的光栅刻线可在透明面,也可在反光面。
当平行光穿过一个光栅时,在一定距离处形成明/暗区。
具有相同栅距的扫描光栅就位于这个位置处。
当两个光栅相对运动时,穿过光栅尺的光得到调制。
如果狭缝对齐,则光线穿过。
如果一个光栅的刻线与另一个光栅的狭缝对齐,光线无法通过。
光电池将这些光强变化转化成正弦电信号。
如果成像扫描编码器的栅距为10 µm或更大,编码器的安装公差相对宽松。
成像扫描原理的光电扫描精度旋转编码器的位置测量精度主要取决于•径向光栅的方向偏差,•刻线码盘相对轴承的偏心,•轴承径向偏差,•与联轴器的连接导致的误差(对带定子联轴器的旋转编码器,这项误差包含在系统精度内),•编码器内和编码器外细分和数字化电路中的细分误差。
最高线数至5 000的增量式旋转编码器:环境温度为20°C且转速较低(扫描频率在1 kHz和2 kHz之间)的最大方向偏差在以下范围内± 18°机械角·3 600 [角秒]等于± 1 栅距。
ROD旋转编码器在2倍频后每圈生成6 000至10 000个信号周期。
线数直接关系到系统精度。
绝对式旋转编码器的绝对位置值精度见相应编码器的技术参数。
带附加增量信号的绝对式旋转编码器的精度取决于其线数:线数 精度16 ± 480角秒32 ± 280角秒512 ± 60角秒2 048 ± 20角秒2 048 ±10角秒(高精度的ROC 425)以上精度数据适用于环境温度为20°C且低转速的增量测量信号。
线数 z20高质量扫描的ROC/ROQ 400/1000和ECN/EQN 400/1000绝对式旋转编码器使用单体大面积光电传感器,不再使用多个(单独)的光电元件。
其条纹结构与测量基准光栅相同。
因此无需使用扫描掩膜匹配光栅结构。
其它扫描方法ECI/EBI/EQI和RIC/RIQ旋转编码器采用感应式测量原理。
因此,栅条结构调制高频信号的幅值和相位。
位置值通过对圆周上分布的所有接收线圈采样获得。
13机械结构类型和安装定子联轴器的旋转编码器ECN/EQN/ERN系列旋转编码器有内置轴承和安装式定子联轴器。
它能补偿径向跳动和对正误差且几乎不影响精度。
编码器轴直接连接被测量轴。
轴角加速期间,定子联轴器必须只吸收轴承摩擦所导致的扭矩。
定子联轴器允许被测轴轴向窜动量为:ECN/EQN/ERN 400:± 1 mmECN/EQN/ERN 1000:± 0.5 mmECN/ERN 100:± 1.5 mm安装将编码器的空心轴推到被测轴上,用两只螺栓或三个偏心夹固定定子。
对空心轴旋转编码器,还能将转子固定在法兰对面的端面上。
ECN/EQN/ERN 1300系列锥度轴旋转编码器特别适合多次重复安装场合(参见样本—伺服驱动位置编码器)。
定子连接在无定心环的平面上。
ECN/EQN/ ERN 400系列万能定子联轴器安装灵活,例如用自带的螺栓由外向内固定在电机盖处。
高动态性能应用要求系统的固有频率f N需尽可能高(参见一般机械信息)。
为此,可将轴固定在法兰端并用四只螺栓固定联轴器或对ECN/EQN/ERN 1000编码器用特殊垫片固定。
用4只螺栓固定联轴器的固有频率f N定子联轴器电缆法兰座轴向径向ECN/EQN/ ERN400标准通用1 550 Hz1 400 Hz1)1 500 Hz1 400 Hz1 000 Hz900 HzECN/ERN100 1 000 Hz–400 Hz ECN/EQN/ERN1000 1 500 Hz2)––1) 也适用于用二只螺栓固定时2) 也适用于用二只螺栓和垫片固定时1415如果编码器轴受力大,例如摩擦轮,皮带轮或链轮的作用力,海德汉公司建议使用ECN/EQN/ERN 400系列带轴承组件的编码器。
轴承组件盲孔轴的ERN/ECN/EQN 400系列编码器ID 574185-03轴承组件可吸收大量径向轴载荷。
以防止编码器轴承过载。
编码器端,轴承组件上有一根直径12 mm的短轴,它可以与ERN/ECN/EQN 400系列盲孔轴编码器配合。
此外,它还有紧固定子联轴器的螺纹孔。
轴承组件的法兰尺寸与ROD 420/430系列编码器的夹紧法兰相同。
轴承组件可用端面的螺纹孔固定,或安装法兰或安装架固定(参见第15页)。
轴夹紧环ECN/EQN/ERN 400如果使用第二个轴夹紧环,空心轴旋转编码器的机械允许的最高转速可提高至12 000 min –1。
ID 540741-xx安装辅件垫片ECN/EQN/ERN 1000用于提高固有频率f N 并仅用两只螺栓安装。
ID 334653-0116ECN/EQN/ERN 400系列扭力架ERN/ ECN/EQN 400系列编码器的简单应用,定子联轴器可用扭力架取代。
可用套件有:钢丝钮力架定子联轴器被一个平金属环取代,平金属环用它的钢丝固定。
ID 510955-01销钮力架不用定子联轴器,用“同步法兰”固定在编码器上。
销用作扭力架可轴向安装也可径向安装在法兰上。
或者,也可以将销压入客户方零件内,在编码器法兰上为销插入一个导向柱。
ID 510861-01常规辅件螺丝刀头用于海德汉联轴器用于ExN 100/400/1000联轴器用于ERO联轴器平口宽度长度ID1.570 mm350378-011.5(球头)350378-022350378-032(球头)350378-042.5350378-053(球头)350378-084350378-074(带止动点)1)350378-14TX8 89 mm 152 mm 350378-11350378-12TX1570 mm756768-421)螺栓标准为DIN 6912(带导向槽的短头螺栓)力矩改锥可调扭矩0.2 Nm至1.2 Nm ID 350379-041 Nm至5 NmID 350379-0517分离式联轴器的旋转编码器ROC/ROQ/ROD 和RIC/RIQ 系列旋转编码器为带内置轴承和实心轴编码器。
编码器轴通过分离式定子联轴器连接被测轴。
联轴器补偿编码器轴和被测轴间的轴向窜动和不对正误差(径向和角度偏移)。
这样可以降低编码器轴承受到的外力作用,否则将缩短其使用寿命。
膜片式联轴器和金属波纹管联轴器用于连接ROC/ROQ/ROD/RIC/RIQ系列旋转编码器的转子(参见联轴器)。
ROC/ROQ/ROD 400和RIC/RIQ 400系列旋转编码器能承载很高的轴承载荷(见图)。
因此,可以将它直接连接在机械传动件上,例如齿轮或摩擦轮。
如果编码器轴受力较大,例如摩擦轮、皮带轮或链轮的作用力,海德汉公司建议使用ECN/EQN/ERN 400系列带轴承组件的编码器。
ROC/ROQ/ROD 400和RIC/RIQ 400编码器的轴承使用寿命轴承的预期使用寿命与轴速和受力作用点处的载荷有关。
有关轴头位置的最大允许载荷,参见技术参数。