自动控制原理课程设计
自动控制原理专业课程设计方案报告

自控课程设计 课程设计(论文)设计(论文)题目 单位反馈系统中传输函数研究学院名称 Z Z Z Z 学院 专业名称 Z Z Z Z Z学生姓名 Z Z Z 学生学号 Z Z Z Z Z Z Z Z Z Z 任课老师 Z Z Z Z Z设计(论文)成绩单位反馈系统中传输函数研究一、设计题目设单位反馈系统被控对象传输函数为 )2)(1()(00++=s s s K s G (ksm7)1、画出未校正系统根轨迹图,分析系统是否稳定。
2、对系统进行串联校正,要求校正后系统满足指标: (1)在单位斜坡信号输入下,系统速度误差系数=10。
(2)相角稳定裕度γ>45º , 幅值稳定裕度H>12。
(3)系统对阶跃响应超调量Mp <25%,系统调整时间Ts<15s3、分别画出校正前,校正后和校正装置幅频特征图。
4、给出校正装置传输函数。
计算校正后系统截止频率Wc和穿频率Wx。
5、分别画出系统校正前、后开环系统奈奎斯特图,并进行分析。
6、在SIMULINK中建立系统仿真模型,在前向通道中分别接入饱和非线性步骤和回环非线性步骤,观察分析非线性步骤对系统性能影响。
7、应用所学知识分析校正器对系统性能影响(自由发挥)。
二、设计方法1、未校正系统根轨迹图分析根轨迹简称根迹,它是开环系统某一参数从0变为无穷时,闭环系统特征方程式根在s平面上改变轨迹。
1)、确定根轨迹起点和终点。
根轨迹起于开环极点,最终开环零点;本题中无零点,极点为:0、-1、-2 。
故起于0、-1、-2,最终无穷处。
2)、确定分支数。
根轨迹分支数和开环有限零点数m和有限极点数n中大者相等,连续而且对称于实轴;本题中分支数为3条。
3)、确定根轨迹渐近线。
渐近线和实轴夹角为φa,交点为:σa。
且:φa=(2k+1)πn−m k=0,1,2······n-m-1; σa=∈pi−∈zin−m;则:φa=π3、3π3、5π3;σa=0−1−23=−1。
自动控制原理课程设计
自动控制原理课程设计一、引言自动控制原理课程设计是为了帮助学生深入理解自动控制原理的基本概念、原理和方法,通过实际项目的设计与实现,培养学生的工程实践能力和创新思维。
本文将详细介绍自动控制原理课程设计的标准格式,包括任务目标、设计要求、设计方案、实施步骤、实验结果及分析等内容。
二、任务目标本次自动控制原理课程设计的目标是设计一个基于PID控制算法的温度控制系统。
通过该设计,学生将能够掌握PID控制算法的基本原理和应用,了解温度传感器的工作原理,掌握温度控制系统的设计和实现方法。
三、设计要求1. 设计一个温度控制系统,能够自动调节温度在设定范围内波动。
2. 使用PID控制算法进行温度调节,实现温度的精确控制。
3. 使用温度传感器实时监测温度值,并将其反馈给控制系统。
4. 设计一个人机交互界面,能够实时显示温度变化和控制系统的工作状态。
5. 设计一个报警系统,当温度超出设定范围时能够及时发出警报。
四、设计方案1. 硬件设计方案:a. 使用温度传感器模块实时监测温度值,并将其转换为电信号输入到控制系统中。
b. 控制系统使用单片机作为主控制器,通过PID控制算法计算控制信号。
c. 控制信号通过电路板连接到执行器,实现温度的调节。
d. 设计一个报警电路,当温度超出设定范围时能够触发警报。
2. 软件设计方案:a. 使用C语言编写单片机的控制程序,实现PID控制算法。
b. 设计一个人机交互界面,使用图形化界面显示温度变化和控制系统的工作状态。
c. 通过串口通信将温度数据传输到电脑上进行实时监控和记录。
五、实施步骤1. 硬件实施步骤:a. 搭建温度控制系统的硬件平台,包括温度传感器、控制系统和执行器的连接。
b. 设计并制作电路板,将传感器、控制系统和执行器连接在一起。
c. 进行硬件连接调试,确保各个模块正常工作。
2. 软件实施步骤:a. 编写单片机的控制程序,实现PID控制算法。
b. 设计并编写人机交互界面的程序,实现温度变化和控制系统状态的实时显示。
自动控制原理课程设计
自动控制原理课程设计一、课程目标知识目标:1. 理解自动控制原理的基本概念,掌握控制系统数学模型的建立方法;2. 掌握控制系统性能指标及其计算方法,了解各类控制器的设计原理;3. 学会分析控制系统的稳定性、快速性和准确性,并能够运用所学知识对实际控制系统进行优化。
技能目标:1. 能够运用数学软件(如MATLAB)进行控制系统建模、仿真和分析;2. 培养学生运用自动控制原理解决实际问题的能力,提高学生的工程素养;3. 培养学生团队协作、沟通表达和自主学习的能力。
情感态度价值观目标:1. 培养学生对自动控制原理的兴趣,激发学生探索科学技术的热情;2. 培养学生严谨、务实的学术态度,树立正确的价值观;3. 增强学生的国家使命感和社会责任感,认识到自动控制技术在国家经济建设和国防事业中的重要作用。
本课程针对高年级本科学生,结合学科特点和教学要求,将目标分解为具体的学习成果,为后续的教学设计和评估提供依据。
课程注重理论与实践相结合,提高学生的实际操作能力和解决实际问题的能力,为培养高素质的工程技术人才奠定基础。
二、教学内容本课程教学内容主要包括以下几部分:1. 自动控制原理基本概念:控制系统定义、分类及其基本组成;控制系统的性能指标;控制系统的数学模型。
2. 控制器设计:比例、积分、微分控制器的原理和设计方法;PID控制器的参数整定方法。
3. 控制系统稳定性分析:劳斯-赫尔维茨稳定性判据;奈奎斯特稳定性判据。
4. 控制系统性能分析:快速性、准确性分析;稳态误差计算。
5. 控制系统仿真与优化:利用MATLAB软件进行控制系统建模、仿真和分析;控制系统性能优化方法。
6. 实际控制系统案例分析:分析典型自动控制系统的设计原理及其在实际工程中的应用。
教学内容按照以下进度安排:第一周:自动控制原理基本概念及控制系统性能指标。
第二周:控制系统的数学模型及控制器设计。
第三周:PID控制器参数整定及稳定性分析。
第四周:控制系统性能分析及MATLAB仿真。
自动控制原理课程设计
自动控制原理课程设计专业:电气工程及其自动化设计题目:二阶系统的综合设计班级:电自1141班学生姓名:Jason学号12指导教师:王彬分院院长:许建平教研主任:高纯斌电气工程学院目录第一章课程设计内容与要求分析 (2)1.1 课程设计内容 (2)1.2 课程设计要求分析 (2)1.2.1 二阶系统综合设计要求分析 (2)1.2.2 直流电机调速设计要求分析 (3)第二章二阶系统综合设计 (4)2.1 校正系统参数及特性图和结构图的确定 (4)2.2 MATLAB仿真实现过程 (6)2.2.1 程序编写 (6)2.2.2 Simulink仿真过程 (8)第三章直流电机调速 (10)3.1 开环直流电机调速 (10)3.2 单闭环晶闸管直流调速系统实验 (10)第四章自控课设总结 (12)参考文献 (13)致谢 (13)第一章课程设计内容与要求分析1.1 课程设计内容本次课程设计内容主要分为两大部分,第一部分为利用有源串联超前校正网络进行二阶系统校正。
通过校正装置开关的开合来比较校正前后的效果差异,主要利用MATLAB进行相关程序的编写和仿真,结合最终的结果经过分析论证最终得出相应结论。
第二部分为直流电动机开环调速实验和单闭环晶闸管直流调速系统实验。
二阶系统综合设计要求:1)开关S闭合引入校正网络后,在单位阶跃输入信号作用时,’≥4.4弧度/秒,相位裕量γ’≥45°;开环截止频率ωc2)根据性能指标要求,确定串联超前校正装置传递函数;3)手工绘制校正前、后及校正装置对数频率特性曲线;4)利用Matlab仿真软件辅助分析设计,并验算设计结果,绘制校正前、后及校正装置对数频率特性曲线;5)在Matlab-Simulink下建立系统仿真模型,求校正前、后系统单位阶跃响应特性,并进行系统性能比较;6)根据计算结果确定有源超前网络元件参数R、C值。
直流电动机调速设计要求:1)未接入反馈回路时直流电动机的转速随负载的变化而产生变化;2)通过晶闸管直流调速系统对系统进行调速;3)接入反馈后在给定电压和负载下产生一个转速,通过负载的改变系统转速能恢复到原来的状态;4)利用电力系统试验台进行试验。
自动控制原理课程设计

自动控制原理课程设计
自动控制原理课程设计是针对自动控制原理课程的学习内容和要求进行的实践性教学任务。
其目的是通过设计和实现一个自动控制系统,加深学生对自动控制原理的理解和应用能力。
一般来说,自动控制原理课程设计包括以下几个步骤:
1. 选题:根据课程要求和学生的实际情况,选择一个合适的自动控制系统作为课程设计的对象。
可以选择一些简单的控制系统,如温度控制、水位控制等,也可以选择一些复杂的控制系统,如飞行器控制、机器人控制等。
2. 系统建模:对选定的控制系统进行建模,包括确定系统的输入、输出和状态变量,建立系统的数学模型。
可以使用传递函数、状态空间等方法进行建模。
3. 控制器设计:根据系统模型和控制要求,设计合适的控制器。
可以使用经典控制方法,如比例积分微分(PID)控制器,也可以使用现代控制方法,如状态反馈控制、最优控制等。
4. 系统仿真:使用仿真软件(如MATLAB/Simulink)对设计的控制系统进行仿真,验证控制器的性能和稳定性。
5. 硬件实现:将设计的控制器实现到实际的硬件平台上,如单片机、PLC等。
可以使用编程语言(如C语言、Ladder图等)进行编程。
6. 系统调试:对实际的控制系统进行调试和优化,使其达到设计要求。
可以通过实验和测试来验证系统的性能。
7. 实验报告:根据课程要求,撰写实验报告,包括实验目的、方法、结果和分析等内容。
通过完成自动控制原理课程设计,学生可以深入理解自动控制原理的基本概念和方法,掌握控制系统的设计和实现技术,提高自己的实践能力和创新能力。
《自动控制原理》课程设计
名称:《自动控制原理》课程设计题目:基于自动控制原理的性能分析设计与校正院系:建筑环境与能源工程系班级:学生姓名:指导教师:目录一、课程设计的目的与要求------------------------------3二、设计内容2.1控制系统的数学建模----------------------------42.2控制系统的时域分析----------------------------62.3控制系统的根轨迹分析--------------------------82.4控制系统的频域分析---------------------------102.5控制系统的校正-------------------------------12三、课程设计总结------------------------------------17四、参考文献----------------------------------------18一、课程设计的目的与要求本课程为《自动控制原理》的课程设计,是课堂的深化。
设置《自动控制原理》课程设计的目的是使MATLAB成为学生的基本技能,熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
使相关专业的本科学生学会应用这一强大的工具,并掌握利用MATLAB对控制理论内容进行分析和研究的技能,以达到加深对课堂上所讲内容理解的目的。
通过使用这一软件工具把学生从繁琐枯燥的计算负担中解脱出来,而把更多的精力用到思考本质问题和研究解决实际生产问题上去。
通过此次计算机辅助设计,学生应达到以下的基本要求:1.能用MATLAB软件分析复杂和实际的控制系统。
2.能用MATLAB软件设计控制系统以满足具体的性能指标要求。
3.能灵活应用MATLAB的CONTROL SYSTEM 工具箱和SIMULINK仿真软件,分析系统的性能。
自动控制原理课程设计
目录一.绪论 (2)1.1相关背景知识 (2)1.2课程设计目的 (2)1.3课程设计任务 (2)二.通过matlab求校正装置的传递函数 (3)三.系统校正前后的分析 (4)3.1特征根的对比 (4)3.2三种响应曲线的对比 (5)3.2.1校正前后的单位脉冲响应曲线对比 (5)3.2.2校正前后的单位阶跃响应曲线对比 (7)3.2.3校正前后的单位斜坡响应曲线对比 (8)四.动态性能的对比 (10)五.系统校正前后的根轨迹 (12)六.系统校正前后的Nyquist图 (14)七.系统校正前后的Bode图 (16)八.心得体会 (18)九.参考文献 (19)一.绪论1.1相关背景知识《自动控制原理》作为自动控制系列课程的实践性教学环节的教程,是新世纪电子信息与自动化系列课程改革教材之一。
该课程综合性强、知识覆盖面广,要求学生具有《工程数学》、《电路》等基础知识,以及较强的计算能力。
而《自动控制原理课程设计》能够帮助学生进一步巩固自控基础知识,并结合电路、电子技术,加强实践操作能力,因此具有很重要的意义。
1.2课程设计目的1.掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
2.学会使用MATLAB 语言及Simulink 动态仿真工具进行系统仿真与调试。
1.3课程设计任务题目:已知单位负反馈系统被控制对象的传递函数为m m 1m 2012m n n 1n 2012n b b b b ()s s s G s a s a s a s a ----++++=++++ (n m ≥)。
参数n 210a ,a ,a ,a 和m 210b ,b ,b ,b 以及性能指标要求因小组而异。
本组题目: 已知单位负反馈系统的开环传递函数0K G(S)S(S 1)(0.125S 1)=++,试用频率法设计串联滞后校正装置,使系统的相角裕量030γ>,静态速度误差系数1v K 10s -=设计要求:1)首先, 根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。
自动控制原理课程设计
总结词
自动控制系统是一种无需人为干 预,能够根据输入信号和系统内 部参数自动调节输出信号,以实 现特定目标的系统。
详细描述
自动控制系统通过传感器检测输 入信号,经过控制器处理后,输 出控制信号驱动执行机构,以调 节被控对象的输出参数。
自动控制系统分类
总结词
根据不同的分类标准,可以将自动控制系统分为多种类型。
生对自动控制原理的理解和应用能力。
03
教学效果
通过本次课程设计,学生能够掌握自动控制系统的基本原理和设计方法,
具备一定的系统分析和设计能力,为后续的专业学习和实践打下坚实的
基础。
课程设计展望
加强实践环节
在未来的课程设计中,可以进一步增加实践环节的比重,通过更多的实验和项目实践,提 高学生的动手能力和解决实际问题的能力。
软件测试与调试
对软件进行测试和调试,确保软件功能正确、 稳定。
控制系统应用实例
温度控制系统
以温度为被控量,实现温 度的自动控制,应用于工 业、农业等领域。
液位控制系统
以液位为被控量,实现液 位的自动控制,应用于化 工、水处理等领域。
电机控制系统
以电机转速或位置为被控 量,实现电机的自动控制, 应用于工业自动化、电动 车等领域。
详细描述
根据控制方式,自动控制系统可以分为开环控制系统和闭环 控制系统;根据任务类型,可以分为调节系统、随动系统和 程序控制系统;根据控制对象的特性,可以分为线性控制系 统和非线性控制系统。
自动控制系统基本组成
总结词
自动控制系统通常由输入环节、控制环节、执行环节和被控对象组成。
详细描述
输入环节负责接收外部信号并将其传输给控制环节;控制环节通常由控制器组 成,用于处理输入信号并产生控制信号;执行环节接收控制信号并驱动执行机 构;被控对象是受控对象,其输出参数由执行机构调节。
自动控制原理教案

自动控制原理-教案一、课程简介1.1 课程背景自动控制原理是工程技术和科学研究中的重要基础,广泛应用于工业、农业、医疗、航空航天等领域。
本课程旨在介绍自动控制的基本理论、方法和应用,使学生掌握自动控制系统的基本原理和设计方法,具备分析和解决自动控制问题的能力。
1.2 教学目标(1)理解自动控制的基本概念、原理和分类;(2)掌握线性系统的数学模型建立和求解方法;(3)熟悉系统的稳定性、瞬态和稳态性能分析;(4)学会设计简单的线性控制器;(5)了解自动控制技术的应用和发展趋势。
二、教学内容2.1 自动控制的基本概念(1)自动控制系统的定义和分类;(2)自动控制系统的组成和基本环节;(3)自动控制系统的性能指标。
2.2 线性系统的数学模型(1)连续时间线性系统的数学模型;(2)离散时间线性系统的数学模型;(3)系统的状态空间表示。
2.3 系统的稳定性分析(1)连续时间线性系统的稳定性;(2)离散时间线性系统的稳定性;(3)系统稳定性的判定方法。
2.4 系统的瞬态和稳态性能分析(1)连续时间线性系统的瞬态响应;(2)离散时间线性系统的瞬态响应;(3)系统的稳态性能分析。
2.5 控制器的设计方法(1)PID控制器的设计;(2)状态反馈控制器的设计;(3)观测器的设计。
三、教学方法3.1 讲授法通过课堂讲授,系统地介绍自动控制原理的基本概念、理论和方法。
3.2 案例分析法通过分析实际案例,使学生更好地理解自动控制系统的原理和应用。
3.3 实验法安排实验课程,让学生亲自动手进行实验,培养实际操作能力和问题解决能力。
3.4 讨论法组织学生进行课堂讨论,促进学生思考和交流,提高分析和解决问题的能力。
四、教学评估4.1 平时成绩包括课堂表现、作业完成情况、实验报告等,占总成绩的30%。
4.2 期中考试通过期中考试检验学生对自动控制原理的基本概念、理论和方法的掌握程度,占总成绩的30%。
4.3 期末考试通过期末考试全面评估学生对自动控制原理的掌握程度,占总成绩的40%。
自动控制原理简明教程课程设计
自动控制原理简明教程课程设计一、前言自动控制原理是自动化学科中的核心课程,是培养自动控制专业学生的重要课程之一。
本文档介绍了自动控制原理课程设计的内容和考核要求,旨在帮助学生更好地掌握自动控制原理的相关知识和技能。
二、课程设计背景自动控制原理是一门理论性较强的课程,需要学生掌握较多的数学和物理知识,对学习难度较大。
为了增强学生的学习兴趣,培养学生的实际动手能力,本次课程设计增加了实验环节,使得学生在学习理论知识的同时,能够更好地将所学知识应用到实际问题中,提高学生的应用能力。
三、课程设计内容自动控制原理课程设计包括以下内容:1. 理论部分理论部分主要包括以下内容:•自动控制系统的基本概念•自动控制系统的数学模型•控制系统的性能指标•控制系统的稳定性分析•控制器的设计与实现•系统鲁棒性分析2. 实验部分实验部分主要包括以下内容:实验一:传递函数建模及可控性分析在这个实验中,我们将学习传递函数的建模方法,并探究传递函数的可控性分析方法。
实验二:比例控制器的设计与实现在这个实验中,我们将学习比例控制器的基本原理,并实现比例控制器的设计和实现。
实验三:积分控制器的设计与实现在这个实验中,我们将学习积分控制器的基本原理,并实现积分控制器的设计和实现。
实验四:比例积分控制器的设计与实现在这个实验中,我们将学习比例积分控制器的基本原理,并实现比例积分控制器的设计和实现。
实验五:控制器参数整定在这个实验中,我们将学习控制器参数整定的基本原理,并实现控制器参数的整定。
3. 报告撰写在课程设计中,学生需要完成一个完整的实验报告,包括实验原理、实验过程、实验结果、数据处理及分析等内容。
四、考核要求本次课程设计的考核主要包括以下内容:1. 实验成绩根据实验成绩,评估学生对于自动控制原理的理解程度和实际动手能力。
2. 报告成绩根据报告的质量和内容,评估学生的思维能力和综合素质。
3. 总评成绩综合考虑实验成绩和报告成绩,给出总评成绩。
自动控制原理第一版课程设计
自动控制原理第一版课程设计一、设计背景自动控制是现代工业生产不可缺少的一项技术,自动控制系统的设计与实现是控制理论必修的一门课程。
为了更好地掌握自动控制原理,本文提出了一种自动控制原理课程设计方案,以培养学生的自主学习、团队协作和系统设计综合能力。
二、设计目标通过本课程设计,旨在达成以下目标:1.督促学生深入理解和应用自动控制原理;2.增强学生的团队协作和交流能力;3.培养学生解决实际问题的技能和实践能力。
三、设计流程1. 阶段一:自动控制原理理论学习在第一阶段,学生将掌握自动控制原理的基本理论与方法。
此阶段的课程设置涵盖以下内容:1.自动控制系统的基本概念和应用案例;2.微积分和线性代数基础知识;3.控制系统的数学模型建立和传递函数控制面板设计;4.控制系统稳态和暂态响应分析;5.控制系统PID控制器设计和参数整定。
2. 阶段二:课程设计任务分配和问题解决在第二阶段,教师将根据学生的兴趣和专业背景,为每个小组分配不同的课程设计任务。
学生将由小组负责相应的设计任务,并利用所学知识解决问题,完成系统设计。
这一阶段主要包括以下内容:1.小组的组建及课程任务分配;2.阅读文献、收集信息,并提出问题;3.利用所学知识解决实际问题;4.小组讨论、汇报和修改设计方案。
3. 阶段三:系统设计与展示在第三阶段,小组将根据设计任务完成相应的系统设计,并进行展示。
主要内容包括:1.掌握复杂系统的设计思路和方法;2.应用PID控制器进行系统设计与模拟仿真;3.使用自动控制仪器进行实验控制;4.完成实验报告,撰写设计文档及展示海报;5.展示和分享自己的设计成果。
四、课程设计的意义自动控制原理课程设计方案的实施对于学生未来的工作和发展具有积极的意义:1.帮助学生明确专业方向并了解行业发展趋势;2.培养学生解决实际问题的能力及团队意识;3.培养学生的科学研究能力和科学探索精神;4.培养学生的自主学习和终身学习思想。
五、结语本课程设计方案致力于让学生了解自动控制原理的基本理论和应用方法,提高学生的自主学习、团队协作能力及系统设计综合能力。
自动控制原理课程设计目的
自动控制原理课程设计目的一、课程目标知识目标:1. 理解自动控制原理的基本概念,掌握控制系统的数学模型、传递函数及方块图表示方法;2. 掌握控制系统的稳定性、快速性、准确性的评价标准及其分析方法;3. 了解常见的控制器设计方法,如PID控制,并理解其工作原理。
技能目标:1. 能够运用数学模型描述实际控制问题,绘制并分析系统的方块图;2. 学会使用根轨迹、频域分析等方法评估控制系统的性能;3. 能够设计简单的PID控制器,并通过模拟或实验调整参数以优化系统性能。
情感态度价值观目标:1. 培养学生对自动控制原理的学科兴趣,激发其探索精神和创新意识;2. 强化团队合作意识,通过小组讨论和项目实践,提高学生的沟通与协作能力;3. 增强学生面对复杂工程问题时的分析问题、解决问题的能力,培养其责任感和工程伦理观。
本课程旨在结合学生年级特点,以实用性为导向,通过对自动控制原理的深入学习,使学生在掌握理论知识的同时,能够具备一定的控制系统分析和设计能力。
课程目标设定既考虑了学科知识体系的完整性,也注重了学生实践技能和创新能力的培养,为后续相关课程学习和未来工程师职业生涯打下坚实基础。
二、教学内容本章节教学内容主要包括以下几部分:1. 自动控制原理基本概念:控制系统定义、分类及其应用;控制系统的数学模型、传递函数和方块图表示。
2. 控制系统的性能分析:稳态性能分析、动态性能分析;介绍根轨迹、频域分析等性能评价方法。
3. 控制器设计:重点讲解PID控制器的设计原理,包括比例、积分、微分控制的作用;介绍PID参数调整方法。
4. 控制系统稳定性分析:利用劳斯-赫尔维茨稳定性判据、奈奎斯特稳定性判据分析系统的稳定性。
5. 实践环节:结合模拟软件或实验设备,进行控制系统的建模、分析、设计和仿真。
教学内容安排和进度如下:1. 自动控制原理基本概念(2课时):第1章内容,介绍控制系统的基础知识。
2. 控制系统的性能分析(4课时):第2章内容,分析控制系统性能,学习评价方法。
课程设计自动控制原理
课程设计自动控制原理一、教学目标本节课的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握自动控制原理的基本概念、原理和应用;技能目标要求学生能够运用自动控制原理分析和解决实际问题;情感态度价值观目标要求学生培养对自动控制原理的兴趣和好奇心,提高学生学习的积极性和主动性。
通过本节课的学习,学生将能够:1.理解自动控制原理的基本概念和原理;2.掌握自动控制系统的分析和设计方法;3.能够运用自动控制原理解决实际问题;4.培养对自动控制原理的兴趣和好奇心,提高学习的积极性和主动性。
二、教学内容本节课的教学内容主要包括自动控制原理的基本概念、原理和应用。
具体包括以下几个方面:1.自动控制原理的定义和发展历程;2.自动控制系统的分类和基本原理;3.控制器的设计方法和应用;4.自动控制原理在实际工程中的应用案例。
教学内容的安排和进度如下:1.第一课时:介绍自动控制原理的定义和发展历程;2.第二课时:讲解自动控制系统的分类和基本原理;3.第三课时:介绍控制器的设计方法和应用;4.第四课时:分析自动控制原理在实际工程中的应用案例。
三、教学方法为了激发学生的学习兴趣和主动性,本节课采用多种教学方法,包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过教师的讲解,向学生传授自动控制原理的基本概念和原理;2.讨论法:引导学生参与课堂讨论,培养学生的思考能力和团队合作精神;3.案例分析法:分析实际工程中的应用案例,让学生更好地理解和掌握自动控制原理;4.实验法:安排实验环节,让学生动手实践,提高学生的实际操作能力。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,本节课选择和准备以下教学资源:1.教材:选用《自动控制原理》教材,作为学生学习的主要参考资料;2.参考书:推荐学生阅读《现代自动控制原理》等参考书籍,加深对自动控制原理的理解;3.多媒体资料:制作PPT课件,通过图片、动画等形式展示自动控制原理的相关概念和原理;4.实验设备:准备自动控制系统实验设备,让学生进行实际操作和观察。
《自动控制原理课程设计》教学大纲

自动控制原理课程设计教学大纲1. 引言自动控制原理课程设计是自动控制原理课程的重要组成部分,通过课程设计,能够帮助学生将理论知识与实际应用相结合,提高学生对自动控制原理的理解和运用能力。
2. 课程设计目的自动控制原理课程设计的目的是培养学生分析和解决实际工程问题的能力,以及运用自动控制原理知识进行系统设计和建模的能力。
通过课程设计,学生应能够熟练运用自动控制原理的基本理论知识,了解控制系统的设计方法,并能够独立完成控制系统的设计与调试。
3. 课程设计内容(1)理论学习:包括PID控制器的原理、校正与调节,控制系统的稳定性分析和设计,频域分析与设计,以及状态空间分析与设计等内容。
(2)实际应用:通过案例分析,让学生了解自动控制在现实生活中的应用,如温度控制系统、液位控制系统等。
(3)仿真实验:利用仿真软件进行控制系统设计与仿真实验,加深学生对理论知识的理解,以及对控制系统实际应用的认识。
4. 课程设计要求(1)掌握理论知识:学生应在课程设计中深入理解自动控制原理的基本理论知识,包括控制系统的稳定性分析、频域分析与设计等。
(2)熟练运用软件:学生应能够熟练运用MATLAB等仿真软件进行控制系统的设计与仿真实验。
(3)独立完成设计:学生应能够独立完成一个控制系统的设计与调试,并能够对系统性能进行评估和优化。
5. 总结回顾自动控制原理课程设计是一门理论与实践相结合的课程,通过课程设计,学生能够深入理解自动控制原理的基本理论知识,熟练运用相关仿真软件进行控制系统的设计与仿真实验,提高学生的工程实践能力和创新意识。
在今后的工程实践中,学生能够将所学知识与技能有效地运用于相关领域,为自动控制领域的发展做出贡献。
6. 个人观点与理解作为自动控制原理课程设计的教学大纲撰写者,我深感自动控制原理课程设计的重要性。
通过课程设计,学生能够更直观地理解自动控制原理的应用,提高自己的实践能力和创新意识。
希望学生能够在课程设计中认真学习,积极思考,不断完善自己的设计方案,提升自己的工程实践能力。
自动控制原理课程设计
自动控制原理课程设计一、设计目的。
自动控制原理是现代工程技术中的重要基础课程,通过本课程设计,旨在帮助学生深入理解自动控制原理的基本概念和方法,掌握自动控制系统的设计和分析技能,提高学生的工程实践能力。
二、设计内容。
1. 选取合适的控制对象,通过调研和分析,选取一个合适的控制对象,例如温度、液位等,作为本课程设计的控制对象。
2. 建立数学模型,根据选取的控制对象,建立其数学模型,包括传递函数、状态空间方程等,为后续的控制器设计奠定基础。
3. 控制器设计,根据控制对象的数学模型,设计合适的控制器,可以选择比例积分微分(PID)控制器或者其他先进的控制算法。
4. 系统仿真与分析,利用仿真软件对设计的控制系统进行仿真,分析系统的稳定性、动态响应等性能指标。
5. 实际搭建与调试,在实际的控制对象上搭建控制系统,进行调试和实验验证,观察系统的实际性能。
6. 总结与展望,总结课程设计的过程和结果,对控制系统的性能进行评价,并展望未来的改进方向。
三、设计要求。
1. 设计过程要符合自动控制原理的基本原理和方法,确保设计的科学性和合理性。
2. 数学模型的建立和控制器设计要准确,仿真与实验结果要可靠。
3. 设计报告要清晰、完整、准确,包括设计思路、理论分析、仿真结果、实验数据等。
4. 设计报告要求能够体现出学生的独立思考和创新能力,具有一定的工程实践价值。
四、设计步骤。
1. 确定控制对象,根据实际情况,选择合适的控制对象,例如温度控制系统。
2. 建立数学模型,根据选取的控制对象,建立其数学模型,包括传递函数、状态空间方程等。
3. 控制器设计,根据控制对象的数学模型,设计合适的控制器,例如PID控制器。
4. 系统仿真与分析,利用仿真软件对设计的控制系统进行仿真,分析系统的性能指标。
5. 实际搭建与调试,在实际的控制对象上搭建控制系统,进行调试和实验验证。
6. 总结与展望,总结课程设计的过程和结果,对控制系统的性能进行评价,并展望未来的改进方向。
自动控制原理修订版课程设计
自动控制原理修订版课程设计一、设计目标本课程设计以自动控制原理为重点,旨在帮助学生深入了解自动控制原理的基本概念、理论和方法,提高学生的掌握自动控制原理的能力和应用能力,达到以下目标:1.理解自动控制原理的基本概念和基本理论;2.掌握自动控制的设计和实现方法;3.能够独立完成自动控制系统的设计和调试;4.培养学生的分析、解决问题和创新能力。
二、教学内容本课程设计主要包括以下教学内容:1.自动控制原理基础知识——包括自动控制系统的基本概念、控制对象的数学模型、PID控制器原理等;2.自动控制系统的设计——包括控制系统的架构设计、PID控制器参数调节、稳定性分析等;3.自动控制实验——包括自动控制器设计,系统建模、仿真、实验等。
三、教学过程本课程设计采用教师讲解、学生实验、讨论交流等方式进行教学。
具体教学过程如下:第一阶段:理论授课在本阶段,教师将依据教学大纲按照课件讲解自动控制原理的基础知识,包括自动控制系统的基本概念、控制对象的数学模型、PID控制器原理等。
学生将通过听课和课后作业巩固知识点。
第二阶段:实验操作在本阶段,学生将根据教师指导分组进行自动控制实验操作,包括系统建模、仿真、实验等。
实验内容涵盖自动控制器设计、PID控制器参数调节、稳定性分析等方面,旨在培养学生的实践能力和解决问题的能力。
第三阶段:实验报告在本阶段,学生将根据实验结果撰写实验报告,并提交给教师进行评阅。
实验报告内容可能包括实验目的、实验原理、实验过程、实验结果、实验分析和总结等方面。
第四阶段:讨论交流在本阶段,教师将组织学生进行讨论交流,回顾自动控制原理课程设计的关键问题和方法,提高学生的分析、解决问题和创新能力。
四、教材推荐本课程设计所需教材如下:1.《自动控制原理》(修订版);2.《自动控制原理试验教程》。
五、评分标准本课程设计评分标准如下:1.实验报告评定标准——包括实验目的、实验原理、实验过程、实验结果、实验分析和总结等方面;2.实验操作评定标准——包括实验操作流程、实验数据处理、实验结果分析与解释等方面。
自动控制原理课程设计
自动控制原理课程设计一、设计目的。
本课程设计旨在通过对自动控制原理的学习和实践,使学生能够掌握自动控制系统的基本原理和设计方法,培养学生的工程实践能力和创新意识。
二、设计内容。
1. 课程概述。
自动控制原理是现代工程技术中的重要基础课程,它涉及到控制系统的基本概念、数学模型、性能指标、稳定性分析、校正设计等内容。
通过本课程的学习,学生将了解到控制系统的基本工作原理,并能够运用所学知识进行实际系统的设计与分析。
2. 课程实践。
课程设计将包括以下内容:(1)控制系统的数学建模与仿真。
通过对不同控制系统的数学建模,学生将学会如何利用数学工具描述控制系统的动态特性,并通过仿真软件进行系统性能分析。
(2)控制系统的稳定性分析与校正设计。
学生将学习控制系统的稳定性分析方法,以及如何进行控制系统的校正设计,包括校正器的设计和参数整定等内容。
(3)控制系统的实际应用。
通过实际案例分析,学生将了解控制系统在工程实践中的应用,包括工业控制、航空航天、机器人等领域的应用案例。
三、设计要求。
1. 学生在课程设计中要求独立完成控制系统的建模与仿真,稳定性分析与校正设计,以及实际应用案例的分析。
2. 学生需要结合课程学习内容,运用所学知识解决实际控制系统设计与分析中的问题,培养学生的工程实践能力和创新意识。
3. 学生需要按时提交课程设计报告,报告内容需包括设计过程、结果分析、存在问题及改进措施等内容。
四、设计步骤。
1. 确定课程设计题目和内容。
学生需要根据课程要求确定课程设计题目和内容,明确设计目的和要求。
2. 学习相关知识。
学生需要认真学习自动控制原理课程相关知识,包括控制系统的基本原理、数学模型、稳定性分析方法等内容。
3. 进行系统建模与仿真。
学生需要运用仿真软件对所选控制系统进行数学建模,并进行系统性能仿真分析。
4. 进行稳定性分析与校正设计。
学生需要对系统进行稳定性分析,并进行控制系统的校正设计,包括校正器的设计和参数整定等内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要科学技术的发展使得各种系统的建模与仿真变得日益复杂起来。
如何快速有效地构建系统并进行系统仿真,已经成为各领域学者急需解决的核心问题。
特别是近几十年来,随着计算机技术的迅猛发展,数字仿真技术在各个领域都得到了广泛的应用与发展。
而MATLAB作为当前国际控制界最流行的面向工程与科学计算的高级语言,它可轻易地再现C或FORTRAN语言几乎全部的功能,并设计出功能强大、界面优美、稳定可靠的高质量程序来,而且编程效率和计算效率极高。
MATLAB是以复数矩阵作为基本编程单元的一种高级程序设计语言,主要适用于矩阵运算及控制和信息处理领域的分析设计,它很容易由用户自行扩展而且集科学与工程计算、图形可视化、图象处理、多媒体处理于一身,并提供了实用的Windows图形界面设计方法,使用户能设计出友好的图形界面。
SIMULINK是MATLAB软件的扩展,它主要用于动态系统的仿真。
在SIMULINK中也加入了许多MATLAB函数功能。
由于其强大的仿真功能,目前MATLAB在自动控制系统校正中的应用发展的越来越快。
自动控制技术中的校正部分的灵活性大,为了满足同样的性能指标,可以采取不同的校正方法。
本文主要从无源、串联方面进行说明,并且着重说明了串联超前校正方式。
并且从理论分析计算与SISO Design Tool 读出的数据进行比较。
计算出系统及网络参数,画出校正前后的根轨迹图、开环伯德图、阶跃响应。
从而把未校正前的不符合题目要求性能指标经校验后调整为符合题目要求的性能指标。
关键字:MATLAB、SISOTOOL、伯德图、根轨迹、阶跃响应、串联超前校正。
目录一、设计内容及要求 (4)二、设计步骤 (4)1、对原系统的理论分析计算 (4)2、用SISO Design Tool 对原系统的分析计算 (5)3、校正器设计的理论分析计算 (6)4、用SISO Design Tool对校正器设计 (8)三、结束语 (11)四、参考文献 (11)一、 设计内容及要求设系统如图1所示。
其前向通道传递函数为G(s)=)2(4+s s K ,要求系统的静态速度误差系数秒120-=K v,相位裕量不小于50度,增益裕量不小于10分贝,试设计系统的相位超前校正装置。
+ -图(1)二、设计步骤1、对原系统的理论分析计算。
根据技术要求,选择系统参数K 。
解: G(s)=)5.01(2s s K +由于秒120-=K v,则2K=20故 K=10秒1- 所以 G(s)=)2(40+s s原系统的幅频特性:L(ω)=⎩⎨⎧--≥-≤ωωωωω5.0lg 20lg 2020lg 202lg 2020lg 202)2(4+s s KL(1)=26, L(2)=20, L(10)=-8 原系统的相频特性:ωωϕ5.01tan90)(--︒-=原系统频率特性伯德图如图所示。
增益交界频率应该由幅频特性第2段求得。
20lg20-20lg ω-20lg0.5ω=0.3640==ωc (rad/s )原系统的相位裕量γ=180°+()c ωϕ=.36.501tan 90⨯--︒=17.6° 原系统不满足相位裕量的技术要求。
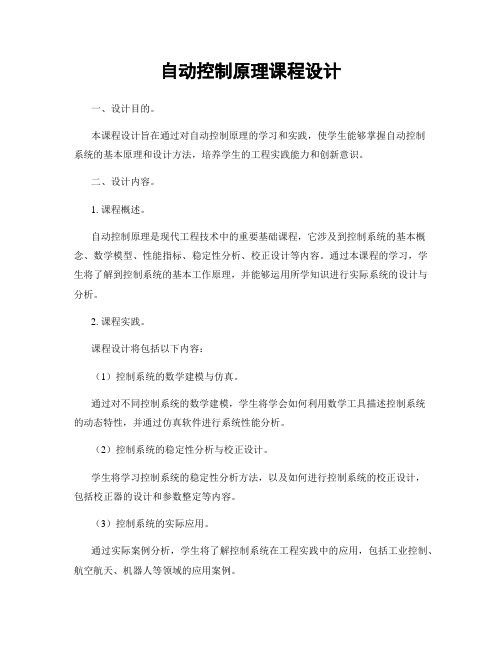
相位交界频率 )(ωϕg =-180° ωg = +∞+∞=++-=-=ωωω.50lg 20lg 2020lg 20)g (g L K 上升时间r t r t =ζωβπ21--n =0.395(s)峰值时间p t pt ==-ωζπ21n 98.03.6⨯π=)(s 08.50 最大超调量p σ pσ%60)(h h h =∞∞-=)()(t p调节时间s t s t =⎩⎨⎧==sT s T 99.3499.23开环传递函数标准形式:G(S)=)2(2ωζωn s s n+由402=n ω和22=n ζω得:)/(32.6s rad n =ω ζ=0.159 闭环传递函数: ()s φ=ss 244040++i s 24.612,1±-=2、 用SISOTool 画出的根轨迹图、开环伯德图、闭环伯德图如图(1-1),阶跃响应如图(1-2):实际读出的数据为:闭环极点的位置: i s 24.612,1±-= 阻尼比: ζ=0.158无阻尼振荡频率: n ω=6.32(rad/s ) 相位交界频率:g ω= +∞增益裕量: g K = +∞开环截止频率: c ω=6.17(rad/s )相位裕量: γ=18°上升时间: r t =0.185s 调节时间: s t s 66.3=峰值时间: p t s 508.0=超调量: p σ%4.60=具体画图如下图(1-1)所示:10-110101102-180-90Frequency (rad/sec)Phase (deg)-60-40-20020Prefilter Bode Editor (F)Magnitude (dB)10-110101102-180-135-90P.M.: 18 deg Freq: 6.17 rad/sec Frequency (rad/sec)Phase (deg)-50-40-30-20-1001020304050G.M.: Inf Freq: Inf Stable loop Open-Loop Bode Editor (C)Magnitude (dB)-2-1.8-1.6-1.4-1.2-1-0.8-0.6-0.4-0.2-8-6-4-2024680.020.0440.070.1050.150.210.320.550.020.0440.070.1050.150.210.320.551234567812345678Root Locus Editor (C)Real Axis Imag Axis阶跃响应如下图(1-2):Step ResponseTime (sec)A m p l i t u d e0123456-1-0.50.511.52System: Closed Loop: r to y I/O: r to yRise Time (sec): 0.185System: Closed Loop: r to yI/O: r to yPeak amplitude: 1.6Overshoot (%): 60.4At time (sec): 0.508System: Closed Loop: r to y I/O: r to ySettling Time (sec): 3.66图(1-2)3、对校正器设计的理论分析计算采用相位超前网络进行串联校正,应该充分利用校正网络的相位超前量,使得校正后的增益交界频率等于m ω 。
因为校正后的增益交界频率大于原系统的增益交界频率,所以原系统在m ω处有更大的相位滞后量,为此,取校正网络的最大相位超前量。
︒=⨯︒-︒=4.635.11).61750(φm 计算超前网络参数α α=φφmm sin 1sin 1-+=42.058.1=3.76在m ω处校正网络的幅频特性值为 20lg α=5.75用了L(ω),)m (c ωL 分别表示原系统的校正环节的对数幅频特性,根据增益 交界频率的定义有: 0)()(=+m c m L L ωω L(m ω)=-20lg α 所以20lg20-20lg m ω-20lg0.5m ω=-20lg α m ω=α40=)/(81.8s rad超前网络参数T T=ωαm 1=0.0585(s )z ω=Tα1=4.55(rad/s)P ω=T1=17.09(rad/s)校正网络的传递函数 ()s G C =TsTs ++11α=09.17/155.4/1s s ++=ss 059.0122.01++校正后的传递函数 ()s G C =)2(40+s s .ss 059.0122.01++校正后的相位裕量︒=︒+⨯--︒=3.4484.6351.88.50tan 190γ4、 用SISO Design Tool 对校正器设计的分析计算校正后实际读出的数据为: i s94.716.62,1±-=, 3s =-6.77 ζ=0.613,γ=48.4°, r t =0.137s ,gω+∞=,g K +∞=, p t s 332.0=, s t s 618.0=,)(s n /r a d .110=ω ,pσ%.8.23= )/(64.8s rad m =ω校正后用SISOTool 画出的根轨迹图、开环伯德图、闭环伯德图如图(2-1):10-110101102103-180-90Frequency (rad/sec)Phase (deg)-100-5050Prefilter Bode Editor (F)Magnitude (dB)10-110101102103-180-135-90P.M.: 48.4 deg Freq: 8.64 rad/sec Frequency (rad/sec)Phase (deg)-80-60-40-200204060G.M.: InfFreq: Inf Stable loop Open-Loop Bode Editor (C)Magnitude (dB)-18-16-14-12-10-8-6-4-2-30-20-1001020300.050.110.170.240.340.460.620.840.050.110.170.240.340.460.620.845101520253051015202530Root Locus Editor (C)Real AxisImag Axis校正后的阶跃响应如图(2-2):Step ResponseTi m e (sec)A m p l i t u d e00.10.20.30.40.50.60.70.80.9-1-0.50.511.522.533.54System: Cl o sed Loop: r to y I /O: r to yPeak ampl i t ude: 1.24Overshoot (%): 23.8At ti m e (sec): 0.332System: Cl o sed Loop: r to y I /O: r to yRi s e Ti m e (sec): 0.137System: Cl o sed Loop: r to y I /O: r to ySettl i n g Ti m e (sec): 0.618图(2-2)控制系统串联超前校正设计11校正电路图:+-三、结束语应用超前网络进行串联校正的基本原理,是利用超前网络的相角超前特性。
只要正确地选择好交界频率,串入超前网络后,就能使被校正系统的相位裕量和增益裕量满足性能指标要求,从而该善闭环系统的动态性能。