工业机械手结构
工业机器人结构设计方案材料

1绪论1.1工业机器人概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力。
从某种意义上说它也是机器进化过程的产物,它是工业以及非工业领域的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
工业机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产,尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,由它代替人进行正常的工作,意义更为重大。
因此,工业机械手在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的应用。
工业机械手的结构形式开始比较简单专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的应用。
1.2工业机器人的组成和分类1.2.1工业机器人的组成机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等组成。
机械手臂结构
现在很多的工厂都在陆陆续续的采用机械臂来替代人工了,这也是工厂现代化生产的必然趋势,毕竟机械手的工作效率高、工作质量稳定,便于管理,支出较少是令所有的工厂老板所没有办法拒绝的。
可是机械臂的结构是怎么样的,相信很多人还是不太了解的,所以下面就来和大家分享一下。
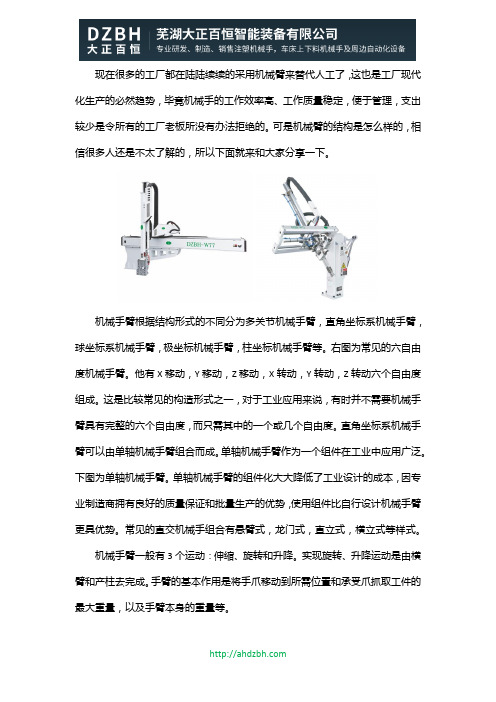
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。
右图为常见的六自由度机械手臂。
他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
这是比较常见的构造形式之一,对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。
直角坐标系机械手臂可以由单轴机械手臂组合而成。
单轴机械手臂作为一个组件在工业中应用广泛。
下图为单轴机械手臂。
单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。
常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。
机械手臂一般有3个运动:伸缩、旋转和升降。
实现旋转、升降运动是由横臂和产柱去完成。
手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
机械手臂由以下几部分组成:(1)运动元件。
如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。
是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。
起着连接和承受外力的作用。
手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。
所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、悬挂式全伺服机械手、开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
工业机器人组成及工作原理
(2)有效负载(Payload) 有效负载是指机器人操作机在工作时臂端可能搬运 的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。
控制信息
• 顺序信息:各种动作单元(包括机械手和外围设备) 按动作先后顺序的设定、检测等。
• 位置信息:作业之间各点的坐标值,包括手爪在该 点上的姿态,通常总称为位姿(POSE)。
• 时间信息:各顺序动作所需时间,即机器人完成各 个动作的速度。
二、工业机器人的技术参数
表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、 运动精度、运动特性、动态特性等。
例:电装(DENSO)机械手
• 系统组成感知系统1感受系统由内部传感器4
模块和外部传感器模块
组成, 用以获取内部和
外部环境状态中有意义
的信息。
2
智能传感器的使用提高
了机器人的机动性、适
应性和智能化的水准。
3
智能传感器的使用提高了
机器人的机动性、适应性
和智能化的水准。
对于一些特殊的信息, 传 感器比人类的感受系统 更有效。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方 式,它要求机器人在复杂的非结构化环境中具有识别环境和自 主决策能力,也就是要具有人的某些智能行为。
示教再现
– 示教-再现 即分为示教-存储-再现-操作四步进行。 • 示教:方式有两种:(1) 直接示教-手把手; (2) 间接示教-示教盒控制。 • 存储:保存示教信息。 • 再现:根据需要,读出存储的示教信息向机器人发 出重复动作的命令。
工业机器人的结构认知

机身设计成机座 式,这种机器人 可以使独立的、 自成系统的控制 装置,可以随意 安放和搬动。
屈伸式机器人的 臂部可以有大小 臂组成,大小臂 间有相对运动, 成为屈伸臂。
任务一:工业机器人的结构 认知
2. 机械结构系统
(3)手腕
联接臂部和末端执行器,手腕 确定末端执行器的作业姿态,一般 需要三个自由度,由三个回转关节 组合而成,组合方式多样。
为了提高机器人手部和手腕的操作能力、灵活性和快速反应能力,使机器人能像人手一样进行
各种复杂的作业,必须有一个运动灵活、动作多样的灵巧手,即仿人手。手指的关节通常通过
钢丝绳、记忆合金、人造肌纤维驱动。
任务一:工业机器人的结构 认知
2. 机械结构系统 有了像人一样的“手指”,就可以做更多细致精确的动作了!它也可以心灵手巧了!
凑,密封问题较大。
结构适当,执行机构可标准化、模拟化, 易实现直接驱动。功率/质量比大,体积小,
结构紧凑,密封问题较小。
伺服电动机易于标准化,结构性能好,噪 声低,电动机一般需配置减速装置,除DD电 动机外,难以直接驱动,结构紧凑,无密封
问题。
安全性
防爆性能较好,用液压油作传动介质,在一定 条件下有火灾危险。
仿人手机器人的动作
任务一:工业机器人的结构 认知
2. 机械结构系统
多指机器人主要有柔性手和多指灵活手两种。
(a)多关节柔性手
(b)三指灵巧手
(c)四指灵巧手
图2-23 柔性手和多指灵活手
任务一:工业机器人的结构 认知
3. 机器人-环境交互系统
机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的 系统。机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配 单元等;也可以是多台机器人、多台机床或设备、多个零件储存装置等集成为一个 去执行复杂任务的功能单元。
机器人的组成结构

常用的机身结构: 1)升降回转型机身结构 2)俯仰型机身结构 3)直移型机身结构 4)类人机器人机身结构
根据臂部的运动和布局、驱动方式、传动和导向装 置的不同可分为:
1)伸缩型臂部结构 2)转动伸缩型臂部结构 3)驱伸型臂部结构 4)其他专用的机械传动臂部结构
3.机身和臂部的配置形式
机身和臂部的配置形式基本上反映了机器 人的总体布局。由于机器人的运动要求、工作 对象、作业环境和场地等因素的不同,出现了 各种不同的配置形式。目前常用的有如下几种 形式:
36
1. 滑槽杠杆式手部
2.齿轮齿条式手部
4. 斜 楔 杠 杆 式
3.滑块杠杆式手部
5.移动型连杆式手部
6.齿轮齿条式手部
7.内涨斜块式手部
8.连杆杠杆式手部
手指类型:
吸附式取料手
吸式取料手是目前应用较多的一种执行器,特别是用于搬 运机器人。该类执行器可分气吸和磁吸两类。 1)气吸附取料手
连杆(Link):机器人手臂上 被相邻两关节分开的部分。
刚度(Stiffness):机身或臂部在外力作用下抵抗变形的能力。 它是用外力和在外力作用方向上的变形量(位移)之比来度量。
自由度(Degree of freedom) :或者称坐标轴数,是指描述物体 运动所需要的独立坐标数。手指的开、合,以及手指关节的自由 度一般不包括在内。
• 圆柱坐标型机械手有一 个围绕基座轴的旋转运 动和两个在相互垂直方 向上的直线伸缩运动。 它适用于采用油压(或气 压)驱动机构,在操作对 象位于机器人四周的情 况下,操作最为方便。
工业机器人内部结构及基本组成原理详解
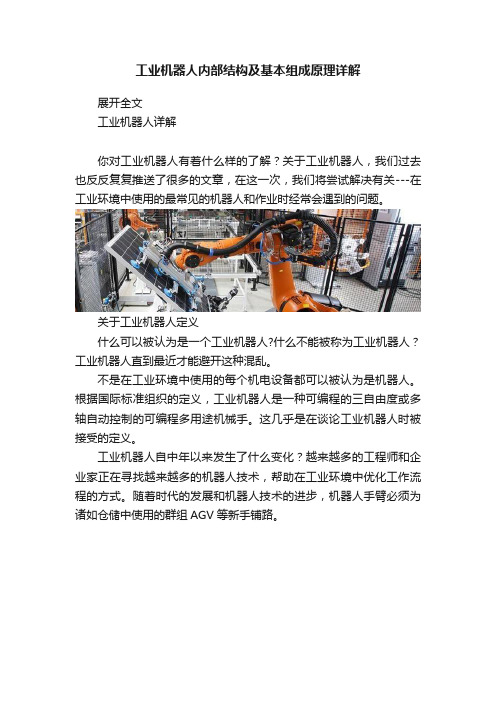
工业机器人内部结构及基本组成原理详解展开全文工业机器人详解你对工业机器人有着什么样的了解?关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的最常见的机器人和作业时经常会遇到的问题。
关于工业机器人定义什么可以被认为是一个工业机器人?什么不能被称为工业机器人?工业机器人直到最近才能避开这种混乱。
不是在工业环境中使用的每个机电设备都可以被认为是机器人。
根据国际标准组织的定义,工业机器人是一种可编程的三自由度或多轴自动控制的可编程多用途机械手。
这几乎是在谈论工业机器人时被接受的定义。
工业机器人自中年以来发生了什么变化?越来越多的工程师和企业家正在寻找越来越多的机器人技术,帮助在工业环境中优化工作流程的方式。
随着时代的发展和机器人技术的进步,机器人手臂必须为诸如仓储中使用的群组AGV等新手铺路。
我们经常说典型的工业机器人由工具,工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。
那么这些是什么?这些部分通常都在一起,控制柜类似于机器人的大脑。
控制面板和示教器构成用户环境。
工具(也称为末端执行器)是为特定任务设计的设备(例如焊接或喷涂)。
机器人手臂基本上是移动工具的东西。
但并不是每个工业机器人都像一个手臂。
不同机器人有不同类型的结构。
控制面板---操作员使用控制面板来执行一些常规任务。
(例如:改变程序或控制外围设备)。
应用“机器人工人”----什么时候应该使用工业机器人而不是人工?相信这个问题大家思考的次数并不少了。
理想情况下,这应该是双赢的。
想快速看到效果,你需要知道什么是别人最不喜欢的工作。
想得最多的是那些重复的,乏味的工作,需要从工作人员那边进行大量单调的行动,这个思考是正确的,因为正是如此,例如从一个输送机到另一个输送机。
如果总是相同的任务,您可以使用专门针对您的需求量身定制的自动化解决方案。
工厂的工作处理需要越来越灵活,在这些情况下,正确的解决方案是:可以试用用于不同任务的可重新编程的机器人进行任务操作。
简述机械手结构的设计和分析

回转运动部分的壳体是由比重较小的铝合金材料制成,而不运动的基 座是用铸铁或铸钢材料制成。
机械手腰座结构的具ຫໍສະໝຸດ 采用方案腰座回转的驱动形式要么是 电机通过减速机构来实现,要 么是通过摆动液压缸或液压马 达来实现,目前的趋势是用前 者。因为电动方式控制的精度 能够很高,而且结构紧凑,不 用设计另外的液压系统及其辅 助元件。考虑到腰座是机器手 的第一个回转关节,对机械手 的最终精度影响大,故采用电 机驱动来实现腰部的回转运动。 一般电机都不能直接驱动,考 虑到转速以及扭矩的具体要求, 采用大传动比的齿轮传动系统 进行减速和扭矩的放大。
• A.直角坐标机器手结构
直角坐标机器手的空间运动是用三个相互垂直的直线运动来实现的。由于直 线运动易于实现全闭环的位置控制,所以,直角坐标机器手有可能达到很高 的位置精度(μm级)。但是,这种直角坐标机器手的运动空间相对机器手的 结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机 器手的结构尺寸要比其他类型的机器手的结构尺寸大得多。
• 3.要设有可靠的传动间隙调整机构,以减小空回 间隙,提高传动精度。
机械手腕部具体采用方案
考虑数控机床加工的具
体形式及对机械手上下料 作业时的具体要求,在满 足系统工艺要求的前提下 提高安全和可靠性,为使 机械手的结构尽量简单, 降低控制的难度,本设计 手腕不增加自由度,实践 证明这是完全能满足作业 要求的,3个自由度来实 现机床的上下料完全足够。
机械手手爪具体采用方案
结合具体的工作情 况,本设计采用连杆 杠杆式的手爪。驱动 活塞往复移动,通过 活塞杆端部齿条,中 间齿条及扇形齿条使 手指张开或闭合。手 指的最小开度由加工 工件的直径来调定。 本设计按照工件的直 径为50mm来设计。
关节型工业机械手的结构设计毕业设计说明书[管理资料]
![关节型工业机械手的结构设计毕业设计说明书[管理资料]](https://img.taocdn.com/s3/m/330f9ed0bcd126fff6050b77.png)
毕业论文题目关节型工业机械手的结构设计学院机械工程学院专业机械工程及自动化班级机自0917班学生学号20090421170指导教师二〇一三年六月三日摘要关于该关节型工业机械手的具体研究方法。
本次设计工作首先对实体安川机器人进行了细致的研究,了解了其内部的具体结构,安川机器人的结构可分为六个轴系,然后根据六个轴系对其内部结构进行分解,以便了解各个零件之间的配合,这样就对安川机器人有了大体的了解。
下面就进行尺寸的测量,尺寸的测量只需要测量一下大体的外观尺寸,而内部尺寸可根据零件的配合进行合理的设计。
然后,进行计算(包括电机功率的计算,轴的设计,齿轮的参数计算),接着可依据相关资料,选取恰当的电机。
最后,可根据实体与之前所掌握的知识对机械手的结构进行设计分析。
关键词:伺服电机、机械手抓、移动旋转。
ABSTRACTHere is about the research method of the industrial manipulator joints. The design work on the real first AnChuan robot has carried on the detailed research, understand the internal structure of concrete, AnChuan robot structure can be divided into six axis, and then according to the six axis of its internal structure decomposition, in order to understand the cooperation between the various parts of the, thus for AnChuan robot have roughly understanding. Below is the size of the measurement, the size of the measurement only need to measure the general appearance of the size, and the internal dimension can be reasonable according to the parts of the design. Then, computing (including motor power calculation, the design of the shaft, the gear parameter calculation), then can according to relevant data, select the appropriate machine. Finally, according to the entity and prior knowledge on the structure of the manipulator design analysis.Keywords:servo motor rotate, manipulator grabbing and moving.目录摘要 (I)ABSTRACT (II)1 前言 (1)机械手国内外发展现状 (1)多关节型工业机械手概述 (2)机械手组成与分类 (3) (3) (3)2机械手的设计方案 (4) (5)机械手设计方案 (5)方案特点 (6)电机的选型 (7)初步估算机械手的质量 (7) (8)计算电机功率 (10)锥齿轮设计 (10)齿轮精度、材料 (10)按齿面接触疲劳强度设计 (10)按齿根弯曲强度设计 (12)锥齿轮参数计算 (12)同步带轮的设计 (13)同步齿形带传动计算 (13)带轮几何尺寸的计算 (14)减速器的设计 (16)减速器减速比的计算 (16)减速器输出轴径的计算 (16)4 机械手各结构设计 (17)手爪结构的设计 (17)手爪的设计要求 (17)手爪的分类 (18)手部结构形式的确定 (18)手腕结构的设计 (18)手腕的设计要求 (18)手腕结构形式的确定 (19)手臂结构的设计 (19)手臂的设计要求 (19)手臂结构 (19)小臂结构形式的确定 (20)小臂后箱体的结构设计 (20)连接杆件的设计 (21)5 关键轴的校核 (21)腕部输入轴的结构 (21)轴的校核 (22)6 结论 (24)参考文献 (25)致谢 (26)1前言机械手国内外发展现状1962年,美国机械铸造公司试制成一台数控试教机械手。
机械手的结构设计概述

机械手的结构设计概述机械手是一个具有机器运动能力的智能机器人。
它的结构设计不仅决定了它的灵活性和精度,还影响了它的可靠性、自适应性、生产效率等方面。
因此,机械手的结构设计是机械手研究的重点之一。
当前,机械手的结构设计种类繁多,但通常把它们分为以下几类:1. 串联结构机械手串联结构机械手是由一系列连接在一起的关节和杆件组成的。
它们通过各自的旋转或移动来实现运动,并在工作时组成某种形状。
串联结构机械手通常使用电机或液压装置来驱动,可以控制单个关节的角度或运动轨迹。
这种机械手结构具有自由度高、定位精度高、稳定性好的优点,在装配、搬运等方面应用非常广泛。
2.并联结构机械手并联结构机械手是由多个平行的连接在一起的链接和关节组成的,它们通过联动运动来实现工作。
并联结构机械手通常具有良好的稳定性和负载能力,并且可以同时控制多个连杆的位置和轨迹,使其在流水线、精密装配等领域的应用非常广泛。
3.混合结构机械手混合结构机械手是以上两种结构的组合,使用串联和并联结构相结合。
混合结构机械手的优缺点都与以上两种结构相尤显著。
在机械手设计过程中,各种结构的选择取决于需求和工作环境,以及对各种性能和特性的优化要求。
除了结构方面的设计,机械手还需要考虑其他因素,例如:1. 电气控制系统的设计,包括输入和输出控制信号的方式、传感器和执行器的适配,以及数据采集和处理;2. 结构材料的选择和成型方法的优化,以实现更高的刚性和韧性。
3. 负载和导向机构的设计优化,以确保精度被维持在一个最佳的范围内。
总之,机械手的结构设计是一个十分复杂的问题,需要综合考虑机械学、控制理论各方面的知识。
不同的应用环境和场合,对其要求有所不同。
因此,机械手的研究团队需要根据具体需求进行深入的研究,并合理地调整和改进机械手的各个部分,以实现更好地应用效果。
工业机器人组成及工作原理
例:库卡工业机器人控制器KRC4
KRC4性能参数:
全部采用总线形式 处理器库卡(工业)PC(2.6GHZ ) 操作系统微软WINDOWS XP 控制轴数8个 AC伺服马达驱动 与外围设备通讯接口: Profinet, Profibus,Interbus,EtherCAT, Ethernet 编程及控制库卡SmartPAD
机器人关节
?
机器人控制器
控制器是根据指令以及传感器信息控制机器人完成一定动作或作业任务的 装置,是决定机器人功能和性能的主要因素,也是机器人系统中更新和发展 最快的部分。 其基本功能有:示教、记忆、位置伺服、坐标设定。 开发程度:封闭型、开放性和混合型。
【目前基本上都是封闭型系统(如日系)或混合型系统(如欧系)】 控制方式:集中式控制和分布式控制。
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理 就是模仿人的各种肢体动作、思维方式和控制决策能力。从控制的角 度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方 式教机械手如何动作,控制器将示教过程记忆下来,然后机器 人就按照记忆周而复始地重复示教动作,如喷涂机器人。
• 存储:保存示教信息。 • 再现:根据需要,读出存储的示教信息向机器人发出重复动作
的命令。
控制信息
• 顺序信息:各种动作单元(包括机械手和外围设备)按动作先 后顺序的设定、检测等。
• 位置信息:作业之间各点的坐标值,包括手爪在该点上的姿态, 通常总称为位姿(POSE)。
• 时间信息:各顺序动作所需时间,即机器人完成各个动作的速 度。
二、工业机器人的技术参数
表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、 运动精度、运动特性、动态特性等。
(完整版)六自由度搬运机械手结构设计
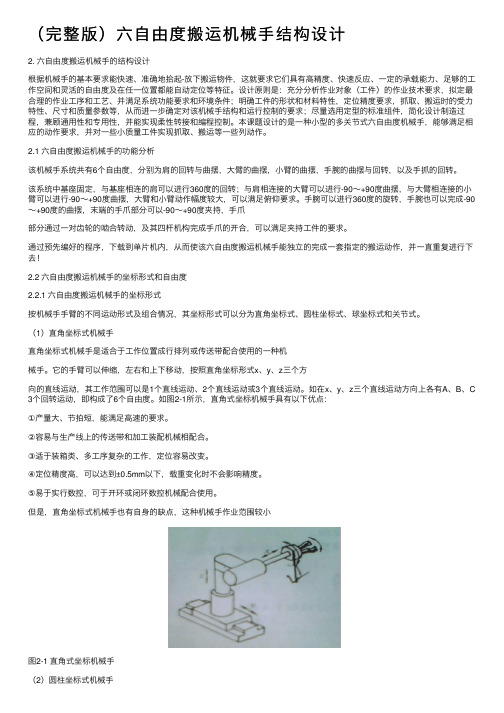
(完整版)六⾃由度搬运机械⼿结构设计2. 六⾃由度搬运机械⼿的结构设计根据机械⼿的基本要求能快速、准确地拾起-放下搬运物件,这就要求它们具有⾼精度、快速反应、⼀定的承载能⼒、⾜够的⼯作空间和灵活的⾃由度及在任⼀位置都能⾃动定位等特征。
设计原则是:充分分析作业对象(⼯件)的作业技术要求,拟定最合理的作业⼯序和⼯艺、并满⾜系统功能要求和环境条件;明确⼯件的形状和材料特性,定位精度要求,抓取、搬运时的受⼒特性、尺⼨和质量参数等,从⽽进⼀步确定对该机械⼿结构和运⾏控制的要求;尽量选⽤定型的标准组件,简化设计制造过程,兼顾通⽤性和专⽤性,并能实现柔性转接和编程控制。
本课题设计的是⼀种⼩型的多关节式六⾃由度机械⼿,能够满⾜相应的动作要求,并对⼀些⼩质量⼯件实现抓取、搬运等⼀些列动作。
2.1 六⾃由度搬运机械⼿的功能分析该机械⼿系统共有6个⾃由度,分别为肩的回转与曲摆,⼤臂的曲摆,⼩臂的曲摆,⼿腕的曲摆与回转,以及⼿抓的回转。
该系统中基座固定,与基座相连的肩可以进⾏360度的回转;与肩相连接的⼤臂可以进⾏-90~+90度曲摆,与⼤臂相连接的⼩臂可以进⾏-90~+90度曲摆,⼤臂和⼩臂动作幅度较⼤,可以满⾜俯仰要求。
⼿腕可以进⾏360度的旋转,⼿腕也可以完成-90~+90度的曲摆,末端的⼿⽖部分可以-90~+90度夹持,⼿⽖部分通过⼀对齿轮的啮合转动,及其四杆机构完成⼿⽖的开合,可以满⾜夹持⼯件的要求。
通过预先编好的程序,下载到单⽚机内,从⽽使该六⾃由度搬运机械⼿能独⽴的完成⼀套指定的搬运动作,并⼀直重复进⾏下去!2.2 六⾃由度搬运机械⼿的坐标形式和⾃由度2.2.1 六⾃由度搬运机械⼿的坐标形式按机械⼿⼿臂的不同运动形式及组合情况,其坐标形式可以分为直⾓坐标式、圆柱坐标式、球坐标式和关节式。
(1)直⾓坐标式机械⼿直⾓坐标式机械⼿是适合于⼯作位置成⾏排列或传送带配合使⽤的⼀种机械⼿。
它的⼿臂可以伸缩,左右和上下移动,按照直⾓坐标形式x、y、z三个⽅向的直线运动,其⼯作范围可以是1个直线运动、2个直线运动或3个直线运动。
机械手总体结构的类型

7075硬铝!工业机器人铝合金铸件机械手的设计要求机械手总体结构的类型工业机器人的结构形式主要有直角坐标结构,圆柱坐标结构,球坐标结构,关节型结构四种。
各结构形式及其相应的特点,分别介绍如下。
1.直角坐标机器人结构直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的.由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到很高的位置精度(μm级)。
但是,这种直角坐标机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。
因此,为了实现一定的运动空间,直角坐标机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。
直角坐标机器人的工作空间为一空间长方体。
直角坐标机器人主要用于装配作业及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构。
2.圆柱坐标机器人结构圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的。
这种机器人构造比较简单,精度还可以,常用于搬运作业。
其工作空间是一个圆柱状的空间。
3.球坐标机器人结构球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的。
这种机器人结构简单、成本较低,但精度不很高。
主要应用于搬运作业。
其工作空间是一个类球形的空间。
4.关节型机器人结构关节型机器人的空间运动是由三个回转运动实现的。
关节型机器人动作灵活,结构紧凑,占地面积小。
相对机器人本体尺寸,其工作空间比较大。
此种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机器人。
手臂的设计要求机器人手臂的作用,是在一定的载荷和一定的速度下,实现在机器人所要求的工作空间内的运动。
在进行机器人手臂设计时,要遵循下述原则;1.应尽可能使机器人手臂各关节轴相互平行;相互垂直的轴应尽可能相交于一点,这样可以使机器人运动学正逆运算简化,有利于机器人的控制。
2.机器人手臂的结构尺寸应满足机器人工作空间的要求。
工作空间的形状和大小与机器人手臂的长度,手臂关节的转动范围有密切的关系。
李阳工业机械手结构设计毕业论文
机械手的控制要素主要包括工作的顺序、能提起多大的重量、运动的时间、到达的位置等。具体还要加上点控和连续控制。
4.2控制系统硬件设计…………………………………
4.3控制系统软件设计…………………………………
第五章设计小结……………………………………………
致射……………………………………………………………
参考文献………………………………………………………………………
而可编程控制器(P L c)由于其具有的高可靠性、编程方便、易于使用和修改,易于扩展和维护,环境要求低、体积小巧,安装调试方便,在工业控制中有着广泛的应用。
PLc它也是一种数字运算操作的电子系统,专为工业环境下应用而设计.它采用可编程续的存储器,用来在其内部存储执行逻辑运算和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种机械或生产过程.PLc技术近年来发展很快,并逐渐取代继电器。跨i’具有通用性强,使用方便,适应面广,可靠性高,抗干扰能力强,编程简单等特点,弛t:在工业自动化控制特别是顺序控制中的地位。总之,为了准确地掌握PLc
液压驱动主要是驱动大体积的重型工业设备如:锅炉等。它的优点是压力高、体积小、力量大动作平稳。缺点是结构繁琐.成本高.而且需要配备压力源。气压驱动的元件是气压缸、气压马达等。一般采用4—6个大气压.也有一些更大的.具体要根据实际情况来定,虽然它的力量比较小、体积比较重,但是出于廉价,而且不影响动作。所以我们的手部采用此种驱动。
四自由度工业机械手结构设计

多重复、单 工作,解放人的双手工。同时,机械
手具有适应于危险、复杂、恶劣环境中工作的特点,
可广泛应用于一些高危、环境恶劣、噪声污染、工作
空间狭小、搬运大质量物品的领域。工业机械手的
研制涉及机械工程学、电子技术、控制工程技术、计 机技术、传感器技术、人工智能等多门学科②,且
机械手的设计比较复杂,造
,故机械手 :及
,B;K/为安全系数,
"2 = 1.0—11。
该机械手的设计抓取工件质量不超过100 g,故
计 选择最大
为100 g。
器附件为
机,其型号为SG90。查阅说明书可知,其自 i
为9 g。安全系数选择1. 0。根 (10)可计算该机
械手的最大持重,即R- = (9 +100) X1. 0 = 109(g) &
四自由度工业机械手的三维结构如图2所示& 机械手工作时,首先旋转盘10转动,使机械臂处于 工作方向;随后,大臂3控制机械手在空间的伸缩, 使机械手处于工件上方;然后,小臂7控制抓取装置 在空间的仰俯运动,让机械手到达工件表面;最后, 末端执行器9通过旋转调整抓取工件的角度,完成 工件的抓取。
1.三角连接件;2.小杆;3.大臂;4 .连接件;5.舵机;6.摆头; 7.小臂;&舵机头;9.末端执行器10.旋转盘11底座 图2四自由度工业机械手的三维结构
《成组技术与生产现代化》2021年第38卷第1期
现代设计技术
3机械手最大持重计算
四自由度工业机械手的主要用途是夹取物体。
夹持式机械手的应用较为广泛&本文设计的机械手
结构如图7
&
4机械手驱动源选择及控制设计
机械手的运动需要外力驱动,而舵机可精确 控制机械手的旋转角度。因此,本文采用舵机进行 驱动。机械手中各舵机的分布如图8所示&
机器人手部结构与应用实例

机器人手部结构和应用实例
引言:
工业机器人的手部也叫末端操作器, 它直接装在工业机器人的手腕上用于 夹持工件或让工具按照规定的程序完 成指定的工作。
机器人手部结构和应用实例
一、手部的特点
机器人手部结构和应用实例
1.手部与手腕相连处可拆卸:
手部与手腕处有可拆卸的机械接口: ,因此要求手部与手腕处 的接头具有通用性和互换性。
2.电磁吸盘(1):
电磁吸盘的结构:
主要由磁盘、防尘盖、线圈、壳体等组成。
工作原理:
夹持工件:
线圈通电→空气间隙的存在→线圈产生大的电感和启 动电流→周围产生磁场(通电导体一定会在周围产生 磁场)→吸附工件
放开工件:
线圈断电→磁吸力消失→工件落位
机器人手部结构和应用实例
2.电磁吸盘(2):
机器人手部结构和应用实例
末端操作器图例(2):
机器人手部结构和应用实例
3.手部是一个独立的部件:
工业机器人通常分为三个大的部件: 机身、手臂(含手腕)、手部。手部 对整个机器人完成任务的好坏起着关 键的作用,它直接关系着夹持工件时 的定位精度、夹持力的大小等。
机器人手部结构和应用实例
4.手部的通用性比较差:
手部可能还有一些电、气、液的接口: 由于手部的驱动方式不同造成。对这 些部件的接口一定要求具有互换性。
机器人手部结构和应用实例
2.手部是末端操作器:
可以具有手指,也可以不具有手指; 可以有手爪,也可以是专用工具。
机器人手部结构和应用实例
末端操作器图例(1):
每个手指有三个或 四个关节。技术关 键是手指之间的协 调控制。
构成:
由真空泵、电磁阀、电机和吸盘等构成。
机器人手部结构详解
拨杆杠杆式手爪
滑槽式手爪
重力式手爪
2.电磁吸盘(1):
电磁吸盘的结构:
主要由磁盘、防尘盖、线圈、壳体等组成。
工作原理:
夹持工件:
线圈通电→空气间隙的存在→线圈产生大的电感和启 动电流→周围产生磁场(通电导体一定会在周围产生 磁场)→吸附工件
放开工件:
线圈断电→磁吸力消失→工件落位
当手爪夹紧和松开物体时,手指作回转运动。当 被抓物体的直径大小变化时,需要调整手爪的位 置才能保持物体的中心位置不变。
平动型:
手,手指姿态不变,作平动。
平移型:
当手爪夹紧和松开工件时,手指作平移运动,并 保持夹持中心的固定不变,不受工件直径变化的 影响。
2.电磁吸盘(2):
适用范围:
适用于用铁磁材料做成的工件;不适合于 由有色金属和非金属材料制成的工件。
适合于被吸附工件上有剩磁也不影响其工 作性能的工件。
适合于定位精度要求不高的工件。
适合于常温状况下工作。铁磁材料高温下 的磁性会消失。
电磁吸盘图例:
3.真空式吸盘:
构成:
由真空泵、电磁阀、电机和吸盘等构成。
3.手部是一个独立的部件:
工业机器人通常分为三个大的部件: 机身、手臂(含手腕)、手部。手部 对整个机器人完成任务的好坏起着关 键的作用,它直接关系着夹持工件时 的定位精度、夹持力的大小等。
4.手部的通用性比较差:
工业机器人的手部通常是专用装置:一 种手爪往往只能抓住一种或几种在形状、 尺寸、重量等方面相近的工件;一种工 具只能执行一种作业任务。
回转型图例:
压缩弹簧
拉伸弹簧
平动型图例:
动作分解:
作业:
用作图法分析当主 动件左移才处于某 个位置时,手指所 处的位置。
(完整版)机器人机械手爪综述
机器人机械手爪综述目录一、夹钳式手部设计的基本要求 (3)二、典型机械爪结构 (4)1)回转型 (4)2)移动型 (5)三、夹钳式手部的计算与分析 (9)1)夹紧力的计算 (9)2)夹紧缸驱动力计算 (11)3)计算步骤 (12)4)手爪的夹持误差分析与计算 (12)四、常用气爪 (17)1)气动手指气缸具有如下特点: (17)2)气动手指气缸主要类型与型号 (18)工业机器人的手部(亦称机械爪或抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面状况等的不同,所以工业机械手的手部结构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的。
常用的手部,按其握持工件的原理,大致可分成夹持和吸附两大类。
夹持类常见的主要有夹钳式,此外还有钩托式和弹簧式。
夹持类手部按其手指夹持工件时的运动方式,可分为手指回转型和手指平移型两种,如图1所示。
吸附类中,有气吸式和磁吸式。
a)回转型内撑式b)回转型外夹式c)平移型外夹式d)钩托式e)弹簧式f)气吸式g)磁吸式图1 机械爪类型夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件。
一般情况下,多采用两个手指,少数采用三指或多指。
驱动装置为传动机构提供动力,驱动源有液压、气动和电动等几种形式。
常见的传动机构往往通过滑槽、斜楔、齿轮齿条、连杆机构实现夹紧或松开。
平移型手指的张开闭合靠手指的平行移动,适于夹持平板、方料。
在夹持直径不同的圆棒时,不会引起中心位置的偏移。
但这种手指结构比较复杂、体积大,要求加工精度高。
回转型手指的张开闭合靠手指根部(以枢轴支点为中心)的回转运动来完成。
枢轴支点为一个的,称为单支点回转型;为两个的,称为双支点回转型。
这种手指结构简单,形状小巧,但夹持不同工件会产生夹持定位偏差。
a)单支点回转型b)双支点回转型C)平移型(平直指)图2 回转型和平移型手指一、夹钳式手部设计的基本要求1. 应具有适当的夹紧力和驱动力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机械手结构设计论文摘要:实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。
此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
关键词:机械手可编程序控制器(PLC) 技能特性引言我国机械手的研究和应用起步较晚,但是随着国内外机械手的快速发展、社会需求的增大和技术的进步,装配机械手得到了迅速的发展,多品种、少批量生产方式和为提高产品质量及生产效率的生产工艺需求,是推动装配机械手发展的直接动力。
PLc是可编程序控制器的简称,于60年代末期在美国首先出现,目的是用来取代继电器,执行逻辑、计时、计数等顺序控制功能,建立柔性程序控制系统。
经过近几十年的发展,PLc己十分成熟与完善。
当前的中国,随着生产力的迅猛发展,工业发展的步伐越来越快在各行业各领域,对自动化程度的要求也愈来愈高.了更好地适应这种情况,科学技术必须被广泛地应用在实际生产中,而PLc以其自身的优势,在自动化领域内扮演着重要的角色,不容忽视!1、设计原理机械手主要由执行机构.驱动机构和控制系统构成.。
机械手的执行机构又包括手部、手臂和躯干。
手部安装在最前端,任务是来准确的抓取工件,当然一说到手一定是与人的相似,所以必须具备手指,而且应具有与人手相似的动作或能代替人完成一系列的动作,以此来达到目的。
手臂的作用是用来辅助手部准确的抓住工件并能够转移到所需要的位置,机械手的运动有两种:一个是上下直线运动,另一个是左右直线运动。
因此其必须安装有液压缸、电液脉冲马达、电磁阀等作为其执行机构的动力部分或辅助系统。
驱动机构主要有四种:液压驱动、气压驱动、电气驱动和机械驱动。
其主要以电气和气压驱动为主,只有少量的运用液压和机械驱动。
液压驱动主要是驱动大体积的重型工业设备如:锅炉等。
它的优点是压力高、体积小、力量大动作平稳。
缺点是结构繁琐.成本高.而且需要配备压力源。
气压驱动的元件是气压缸、气压马达等。
一般采用4—6个大气压.也有一些更大的.具体要根据实际情况来定,虽然它的力量比较小、体积比较重,但是出于廉价,而且不影响动作。
所以我们的手部采用此种驱动。
电气驱动时,直线运动可以采用电动机带动丝杠、螺母机构。
我们通用的机械手则考虑到用步进电动机、直或交流司服电机、和变速箱等电气驱动有动力源简单、维护和使用比较方便。
驱动机构采用一种形式的动力,力量比较大。
所以本设计用该种驱动形式。
蕞且是电磁阀驱动气压缸的形式。
机械手的控制要素主要包括工作的顺序、能提起多大的重量、运动的时间、到达的位置等。
具体还要加上点控和连续控制。
控制系统可根据动作的要求设计数字顺序。
它首先要编制程序加以存储,然后在根据规定的程序,控制机械手的运动工作。
为了使其程序简单、修改容易等优点,本设计采用PLC控制系统来完成操作。
2、机械手的机能和特性机械手最显著的特点有以下几个:(1)可编程生产自动化的进一步发展是柔性自动化。
机械手可随其工作环境变化的需要再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统(FMS)中的一个重要组成部分。
(2)拟人化机械手在机械结构上有类似人的小臂、手腕、手爪等部分,在控制上有电脑。
此外,智能化机械手还有许多类似人类的“生物传感器”,如接触传感器、力传感器、负载传感器等.传感器提高了机器手对周围环境的白适应能力。
(3)通用性除了专门设计的专用机器手外,一般机械手在执行不同的作业任务时具有较好的通用性。
比如,更换机械手手部末端操作器(手爪、工具等)便可执行不同的作业任务。
(4)机电一体化机械手技术涉及的学科相当广泛,但是归纳起来是机械学和微电子技术的应用,特别是计算机技术的应用密切相关。
因此,机械手技术的发展必将带动其它技术的发展,机械手技术的发展和应用水平也可以从一个方面验证一个国家科学技术和工业技术的发展和水平。
3、机械手的分类目前世界各国对处于发展阶段的机械手还没有统一的分类标准,大致有以下几种分类方法。
3.1按使用范围分类(1)固定程序的专用机械手通常根据主机的特定要求设计成固定程序(或简单的可变程序)。
这种机械手多为气动或液动。
气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手。
其主要特点是:介质李源极为方便,输出力小,气动动作迅速,结构简单,成本低。
但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。
气动技术有以下优点:(1)介质提取和处理方便。
气压传动工作压力较低,工作介质提取容易,而后排入大气,处理方便,一般不需设置回收管道和容器:介质清洁,管道不易堵存在介质变质及补充的问题.(2)阻力损失和泄漏较小,在压缩空气的输送过程中,阻力损失较小(一般不卜浇塞仅为油路的干分之一),空气便于集中供应和远距离输送。
外泄漏不会像液压传动那样,造成压力明显降低和严重污染。
(3)动作迅速,反应灵敏。
气动系统一般只需要0.02s—O.3s即可建立起所需的压力和速度。
气动系统也能实现过载保护,便于自动控制。
(4)能源可储存。
压缩空气可存贮在储气罐中,因此,发生突然断电等情况时,机器及其工艺流程不致突然中断。
(5)工作环境适应性好。
在易燃、易爆、多尘埃、强磁、强辐射、振动等恶劣环境中,气压传动与控制系统比机械、电器及液压系统优越,而且不会因温度变化影响传动及控制性能。
(6)成本低廉。
由于气动系统工作压力较低,因此降低了气动元、辅件的材质和加工精度要求,制造容易,成本较低。
传统观点认为:由于气体具有可压缩性,因此,在气动伺服系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。
此外气源工作压力较低,抓举力较小。
虽然气动技术作为机器人中的驱动功能已有部分被工业界所接受,而且对于不太复杂的机械手,用气动元件组成的控制系统己被接受,但由于气动机器人这一体系己经取得的一系列重要进展过去介绍得不够,因此在工业自动化领域里,对气动机械手、气动机器人的实用性和前景存在不少疑虑。
(7)可编程序的通用机械手工作程序可变,以适应不同的工作对象,通用性强,适合于以多品种、中小批量生产为特点的柔性制造系统中。
3.2按使用行业、部门和用途分类(1)工业机械手它们又可按作业类别分为锻压、焊接、表面喷涂、装卸、装配、检测等(2)采掘机械手如海洋探矿机器人的机械手等。
(3)军事用途机械手(4)服务机械手如医疗机械手,家用机器人(机械手)等。
3.3按机械手运动控制方式分类(1)点位控制(PTP)机器手就是由点到点的控制方式,这种控制方式只能在目标点处准确控制机械手末端执行器的位置和姿态,完成预定的操作要求。
目前应用的工业机械手中,很多是属于点位控制方式的,如上下料搬运机械手。
(2)连续轨迹控制(cP)机械手机器人的各关节同时作受控运动,准确控制机器人末端执行器按预定的轨迹和速度运动,并能控制末端执行器沿轨迹上各点的姿态。
弧焊、喷漆和检测机械手等均属连续轨迹控制方式根据力学的观点,自由度指的是力学系统的独立坐标的个数。
力学系统由一组坐标来描述。
比如一个质点的三维空间中的运动,由x,y,z三个坐标来描述;或者在球坐标系中,由r,e,(P三个坐标描述。
描述系统的坐标可以自由的选取,但独立坐标的个数总是一定的,即系统的自由度。
本设计的机械手共有三个自由度,即:手臂的伸缩、手臂的上下摆动、手指的抓握。
4、躯干和传动系统与驱动力矩4.1躯干和传动系统的组成机械手的传动分为液压、气压、电气和机械四种,本设计采用综合传动方式,即手臂采用电气传动,而手爪采用气压传动。
(1)夹紧机构机械手的是抓取工件的部分。
因此要准确迅速的抓起工件是设计的最起码的要求。
当我们设计手爪时,首先要知道机械手的坐标形式、运动的速度和加速度的具体要求,还要考虑被夹紧的物体的重量、大小和惯性来计算。
同时还要考虑手爪的开口尺寸,以保证有足够的开口来抓取工件。
为了防止工件在被夹紧是有损坏,所以我们要在手爪的接触部分加上弹性棉垫。
为了防止电源临时出现故障。
所以我们应该对其工件加以保护。
夹紧机构的形式是多样的,有吸盘式的、有机械式的,为了简化我们的设计,所以我们采用机械式的夹紧机构。
机械式的夹紧机构是一种应用很广泛的一种,它主要是更能够与人的动作相协调,可以直线运动等。
本设计采用二指气动手爪,利用PLc技术来完成其的某部分的动作。
(2)躯干躯干是由底盘和手臂两大部分组成的。
底盘是支撑机械手的重量的机构,在本设计中只起到支撑的作用。
手臂是机械手的主要部分它由操作机的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件,它主要是对手爪起到一个支撑作用,其也是通过可编程控制器的脉冲信号来控制电磁阀驱动气压缸控制手臂完成各种运动的.4.2手腕转动时所需的驱动力矩手腕转动时所需的驱动力矩可按下式计算:封摩偏惯驱MMMMM+++=式中:驱M- 驱动手腕转动的驱动力矩(cmN⋅);惯M- 惯性力矩(cmN⋅);偏M- 参与转动的零部件的重量(包括工件、手部、手腕回转缸的动片)对转动轴线所产生的偏重力矩(cmN⋅).封M- 手腕回转缸的动片与定片、缸径、端盖等处密封装置的摩擦阻力矩(cmN⋅);下面是手腕受力情况,分析各阻力矩的计算:1、手腕加速运动时所产生的惯性力矩M悦若手腕起动过程按等加速运动,手腕转动时的角速度为ω,起动过程所用的时间为t∆,则:).(1cmNtJJM∆+=ω)(惯式中:J- 参与手腕转动的部件对转动轴线的转动惯量)..(2s cm N ;1J - 工件对手腕转动轴线的转动惯量)..(2s cm N 。
若工件中心与转动轴线不重合,其转动惯量1J 为:gG J J c 11+=21e式中: c J - 工件对过重心轴线的转动惯量)..(2s cm N :1G - 工件的重量(N);1e - 工件的重心到转动轴线的偏心距(cm),ω- 手腕转动时的角速度(弧度/s);t ∆- 起动过程所需的时间(s);ϕ∆— 起动过程所转过的角度(弧度)。
2、手腕转动件和工件的偏重对转动轴线所产生的偏重力矩M 偏=偏M 11e G +33e G (cm N ⋅)式中: 3G - 手腕转动件的重量(N);3e - 手腕转动件的重心到转动轴线的偏心距(cm)当工件的重心与手腕转动轴线重合时,则11e G 0=.3、手腕转动轴在轴颈处的摩擦阻力矩封M=封M )(212d R d R fB A +(cm N ⋅) 式中:1d ,2d - 转动轴的轴颈直径(cm);f - 摩擦系数,对于滚动轴承01.0=f ,对于滑动轴承1.0=f ;A R ,B R - 处的支承反力(N),可按手腕转动轴的受力分析求解, 根据0=∑)(F M A ,得: 33l G l R B +=l G l G 122+ B R =ll G l G l G 332211-+同理,根据B M ∑(F)0=,得:ll l G l l G l l G R A )()()(332211-++++=式中:2G - 的重量(N)321,,,l l l l ,— 如图4-1所示的长度尺寸(cm).参考文献:[1] 机械设备控制基础-王本轶(主编)-北京机械工业出版社 2005[2] 可编程控制器及应用-万太福唐贤永(主编)-重庆大学出版社 1992[3] 电器与PLC 控制技术-张万忠刘明芹(主编)北京化学工业出版社 2003[4] 工厂电气控制设备-许廖(主编)-北京机械工业出版社 1999[5] 液压与气动技术-许菁刘振兴(主编)-北京机械工业出版社 2000。