51单片机数码管显示温度程序
51单片机汇编语言程序设计
51单片机汇编语言程序设计1.题目:数码管显示1~72.题目分析本实验将要求51单片机采用汇编程序来实现以上程序,我们首先要对51单片机进行硬件电路设计,然后编写相应的汇编程序3.硬件电路4.程序设计;-------------------------------------------------------------------------------;选择P1口作为数码管位选;-------------------------------------------------------------------------------org 0hmov p1,h ;启动P1作为数码管位选again: m ov p2,Fh ;0000 0011 1111 显示数字1sjmp againmov p2,h ;0000 0110 显示数字2sjmp againmov p2,Bh ;0101 1011 显示数字3sjmp againmov p2,Fh ;0100 1111 显示数字4sjmp againmov p2,h ;0110 0110 显示数字5sjmp againmov p2,Dh ;0110 1101 显示数字6sjmp againmov p2,dh ;0111 1101 显示数字7sjmp againend5.程序流程本汇编程序的程序流程如下:1)将P1口设置为数码管的位选;2)通过P2口设置相应的数字,P2口的值将会根据数字的不同而不同,以便实现将不同的数字显示到数码管上;3)循环2步骤,不断刷新P2口的值,从而实现数字的不断变化,从而实现将1-7数字在数码管上循环显示。
基于51单片机的MLX90614红外测温源程序

#define PWMCtrlAddr 0x02 //PWM 设定
#define TaRangeAddr 0x03 //环境温度设定
//************数据定义****************************************************
bdata uchar flag1; //可位寻址数据
sbit bit_out=flag1^7;
//设置显示模式******* 0x08+ *********************************************
#define LCD_SHOW 0x04 //显示开
#define LCD_HIDE 0x00 //显示关
#define LCD_AC_DOWN 0x00 //默认光标左移 AC-
#define LCD_MOVE 0x01 //画面可平移
#define LCD_NO_MOVE 0x00 //默认 画面不移动
#define LCD_CURSOR 0x02 //显示光标
#define LCD_NO_CURSOR 0x00 //无光标
#define LCD_FLASH 0x01 //光标闪动
#define LCD_DATA 1 // 数据
#define LCD_CLEAR_SCREEN 0x01 // 清屏
#define LCD_HOMING 0x02 // 光标返回原点
基于51单片机的MLX90614红外测温源程序如下:
//-------------------------------------------------------------------------
51单片机+ds1302+DS18b20温度时钟(电路图+C语言程序)
时钟电路图:*■11PCB板:酱时井務ft是用诵m-pdfMerisi 口叵因Fjr 齐舱 C :s ® 工细理沖缶皿ndm - * TfS ' 4' 包田U i > 'ir ft ZS:MZ fH钟些fl是用说町-Pdf Wirrcf闻礒雜sbit dis_ bitlsbit dis_ bit2sbit dis_ bit3sbit dis_ bit4sbit dis_ bit5sbit dis_ bit6sbit ledl _bitsbit led2 ! bit=P2A7; II定义数码管控制口=P2A6; II定义数码管控制口=卩2八4; II定义数码管控制口=卩2八3; II定义数码管控制口=P2A1; II定义数码管控制口=P2A0; II定义数码管控制口=P2A2; II定时LED勺控制口=P2A5; II定时LED勺控制口单片机程序:/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>訂开始 LJ-雲匕®务如1痒3月计ttVl. •呈T』d"吐拠席射■ w耳pg文宇■[豹…SS时軽件思冃说#define uehar #define uint unsigned char unsigned intsbit s1_bit =P1A 0; // 定义S1 控制口 sbit s2_bit =P01; // 定义 S2控制口 sbit s3_bit =P02; // 定义 S3控制口 sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据 sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t);//8US 延时基准程序void delay_50us(ui nt t); //void display1(uchar dis_data); void display2(uchar dis_data); void display3(uchar dis_data); void display4(uchar dis_data); void display5(uchar dis_data); void display6(uchar dis_data);void init_t0(); //定时器0初始化函数 void dis_led(); //LED 处理函数 void judge_s1(); //S1 按键处理函数void judge_s2(); //S2 按键处理函数 void judge_s3(); //S3 按键处理函数void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1); 示子程序 void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchar s1,uchar san); 〃闪烁显示子程序 void judge_dis(); //显示处理函数 void judge_clock(); // 显示处理函数 void set_ds1302(); // 设置时间void get_ds1302();// 读取当前时间void w_1byte_ds1302(uchar t); // 向 DS130写一个字节的数据 uchar r_1byte_ds1302(); // 从DS130读一个字节的数据//DS18B20测温函数定义延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序 //数码管4显示子程序 //数码管5显示子程序 //数码管6显示子程序//显 s2,ucharvoid w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};// 上电时默认的时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TRO =1;//// set_ds1302();〃设置DS1302勺初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timerO() interrupt 1{TH0=(65536-50000)/256;TL0=(65536 - 50000)%256; t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒{ _msec on d_co unt =0;sec on d_flag =1;}}}//**************************************************//显示处理函数void judge_dis(){if (flag1 ==0){if (second_flag ==1){ _zancun7 ++;sec on d_flag =0;} _if (zancun7 <1){if (temp_flag2 ==1){ 一readtemp_ds18b20(); // 读取温度temp_flag2 =0;厂dis_temp(); //温度显示函数}if (zancun7 >=1){temp_flag2 =1;zancun4 =hour_count &0xf0;zancun4 >>=4;zancun5 =minute_count&0xf0;zancun5 >>=4;zancun6 =sec on d_co unt&0xf0;zancun6 >>=4;dis(za ncun4 ,hour_co unt &0x0f,za ncun5,minu te_co unt &0x0f,za ncun 6,sec ond_ cou nt &0x0f);dis_led();if (zancun7 ==5)zancun7 =0;}}if (flag1 !=0){switch (flag1){case 1:dis(5,10,11,1,12,12); // 显示SET1led1_bit =1;led2_bit =1;break;case 2:dis(5,10,11,2,12,12); // 显示SET2break;case 3:dis(5,10,11,3,12,12); // 显示SET3break;case 4:dis(5,10,11,4,12,12); // 显示SET4break;case 5:dis(5,10,11,5,12,12); // 显示SET5break;case 6:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,1); break;case 7:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,2); break;case 8:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,3); break;case 9: //进入修改时间,时间分位个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,4); break;case 10: //进入修改闹钟,闹钟小时十位闪烁dis_san(zancunl / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,zancun3,1); break;case 11://进入修改闹钟,闹钟小时个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,12,zancun3,2); break;case 12: //进入修改闹钟,闹钟小时十位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,3);break;case 13: //进入修改闹钟,闹钟小时个位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,4);break;case 14: //进入修改闹钟的开关dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,6);break;case 15:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,1);break;case 16:dis_san(zancun1 / 10,zancunl %10,zancun2/10,zancun2%0,zancun3/ 10,zancun3%10,2);break;case 17:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,zancun3/ 10,zancun 3%10,3);break;case 18:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,4);break;case 19:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,5);break;case 20:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,6);break;case 21:if (second_flag ==1){ _sec on d_flag =0;countdown_second --;if (countdown_second ==255){ _coun tdow n_sec ond =59;countdown_minute --;if (countdown_minute ==255){ _coun tdow n_min ute =59;countdown_hour --;if (countdown_hour ==255){flag1 =22;coun tdow n_min ute =0;coun tdow n_hour =0;coun tdow n_sec ond =0;coun tdow n_flag=1;_ } } } }dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 22:{ speak =1;}dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 23: dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break; case 24:if (msecond_flag ==1) { _msec on d_flag =0; msec on d_msec ond ++;if (msecond_msecon (==10){msec on d_msec ond =0; msec on d_sec ond ++;if (msecond_second==60) { _msecond_second =0; msec ond_minute ++;if (countdown_flag { _speak=0;if (second_flag { _sec on d_flag coun tdow n_flag} _ } else>0 &&countdown_flag <7)==1) =0; ++;if (msecond_minute==1OO) { _msec ond_minute =99;flagl =23;}}}}dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break;case 25:dis(zancun3 / 10,zancun3 %0,zancun2 / 10,zancun2 %10,zancun1 /10,zancun1 %0 );break;default :break;}}}//**************************************************〃S1按键处理函数void judge_s1(){ _s1_bit =1;//置IO为1,准备读入收据if (s1_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s1_bit ==0){switch (flag1){case 0:case 1:case 2:case 3:case 4:case 6:case 7:case 8:case 10:case 11:case 12:case 13:case 15:case 16:case 17:case 18:case 19: flag1++;break;case 9: flag1=6;break;case 14: flag1=10;break;case 20: flag1=15;break;case 5:case 21:case 22:case 23: //系统从秒表状态复位case 24: //系统从秒表状态复位case 25: //系统从计数器复位flag1 =0;break;default :break;}while (s1_bit ==0){ _judge_dis();}〃等待按键释放}}}〃************************************************** 〃S2按键处理函数void judge_s2(){ _s2_bit =1; //置IO为1,准备读入收据if (s2_bit ==0)//判断是否有按键按下=0;{delay_50us(1); //延时,去除机械抖动 if (s2_bit ==0) { switch (flagl) { flag1 =6; zancun4 =hour_count &0xf0;zancun4 >>=4; zancun6 =hour_count &0x0f;zancun1=zancun4*10+zancun6; //zancun 1=hour_co unt; zancun5 =minute_count &0xf0; zancun5 >>=4; zancun6 =minute_count &0x0f; zancun2 =za ncun5* 10+za ncun6; case 1: //在显示SET 状态下按S2牛,进入修改时间 // zancun2=minu te_co unt; break; case 2: //在显示SET2犬态下按S2,进入设置闹钟 zancunl =clock_hour; zancun2 =clock_m inu te; flagl =10; break; case 6: //修改时钟小时十位状态下按 case 7: //修改时钟小时个位状态下按 case 8: //修改时钟分钟十位状态下按 case 9: //修改时钟分钟个位状态下按 〃zancun4=za ncun 1/10; 测S:SM tab23[2] =zancun1/10* 16+za ncu n1%10; tab23[1] hour_c ount minu te_c ount sec ond_co unt tab23[0]set_ds1302(); flag1//zancun 5=za ncun2&0 xf0; //zancun 5>>=4; =zancun2/10* 16+za ncu n2%10; =tab23[2]; =tab23[1]; =0; //设置DS130的初始时间 =0;break; case 10: //修改闹钟小时十位状态下按S2case 11: //修改闹钟小时个位状态下按S2case 12: //修改闹钟分钟十位状态下按S2 case 13: //修改闹钟分钟个位状态下按S2 case 14: //修改闹钟使能状态下按S2clock_hour clock_m inute clock_e n flag1=zancun1; =zancun2; =zancun3;=0;break;case 3:flagl =15;zancunl =co un tdow n_hour;zancun2 =co un tdow n_minu te;zancun3 =co un tdow n_sec ond;break;case 15:case 16:case 17:case 18:case 19:case 20:coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flag1 =21;coun tdow n_flag =0;break;case 22:flag1 =21;break;case 21:flag1 =22;break;case 4:flag1 =23; //秒表暂停msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 23:flag1 =24;break;case 24:flag1 =23;break;case 5:flagl =25;//进入计数器模式zancunl =0;zancun2 =0;zancun3 =0;break; default :break;}while (s2_bit ==0){ _judge_dis();}//等待按键释放}}}//**************************************************//S3按键处理函数void judge_s3(){ _s3_bit =1;//置IO为1,准备读入收据if (s3_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s3_bit ==0){ _switch (flag1){case 6: //修改时间小时的十位数zancun1 +=10;if (zancun1 >=24)zancun1 =zancun 1%10;break;case 7: //修改时间小时的个位数za ncun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 8: //修改时间分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60;break;case 9: //修改时间分钟的个位数za ncun2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 10: //修改闹钟小时的十位数zancunl +=10;if (zancunl >=24)zancunl =zancun 1%10; break;case 11: //修改闹钟小时的个位数zancunl =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 12: //修改闹钟分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 13: //修改闹钟分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 14:zancun3 A=1;break;case 15: //修改倒计时小时的十位数zancun1 +=10;if (zancun1 >=100)zancun 1 -=100; break;case 16: //修改倒计时小时的个位数zancun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;break;case 17: //修改倒计时分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 18: //修改倒计时分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 19: //修改倒计时秒的十位数zancun3 +=10;if (zancun3 >=60)zancun3-=60; break;case 20: //修改倒计时秒的个位数zan cu n3 =za ncun3/10* 10+(za ncun3 %10+1) %10;break;case 21:case 22: //coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flagl =21;break;case 23:case 24: //秒表复位flag1 =24;msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 25:zancun1 ++;if (zancun1 ==100){zancun1 =0;zancun2 ++;if (zancun2 ==100){zancun2 =0;zancun3 ++;}}break;default : break;}while (s3_bit ==0){ _judge_dis();}〃等待按键释放}}} //显示处理函数void judge_clock() {zancun4 =hour_count &0xf0;zancun4 >>=4;zancun6 =hour_count &0x0f;zancun4 *=10;zancun4 +=za ncun6;zancun5=minute_count &0xf0;if (san ==1){zancun5 >>=4;zancun6 =minute_count &0x0f;zancun5 *=10;zancun5 +=za ncun6;if (msecond_count<=5) {speak =0; speak_co unt ++;}else{speak =1;}}else{speak =1;}}〃****************************************////闪烁显示子程序void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchars1,uchar san){if (clock_hour ==zancun4 &&clock_minute ==zancun5){ 一 一if (clock_en { _ speak_co unt clock_flag speak_co unt} _ } else{clock_flag =0;} _if{ (clock_flag ==1 ==1&&clock_flag ==0)=0; //开启蜂鸣器=1;=0;&&speak_count <400)s2,ucharif (msecond_count<5) { _ display1(s6);}}else{display1(s6);}if (san ==2){if (msecond_count<5) { _ display2(s5);}}else{display2(s5);}if (san ==3){if (msecond_count<5) { _ display3(s4);}}else{display3(s4);}if (san ==4){if (msecond_count<5) { _ display4(s3);}}else{display4(s3);}if (san ==5){if (msecond_count<5){ _ display5(s2);}}else{display5(s2);}if (san ==6){if (msecond_count<5){ _ display6(s1);}}else{ display6(s1);}}〃****************************************//时钟显示程序void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1) { display1(s6);display2(s5);display3(s4);display4(s3);display5(s2);display6(s1);}〃********************************************************************************************void init_tO(){ _TMOD0x01;〃设定定时器工作方式1,定时器定时50毫秒TH0=(65536-50000)/256;TL0=(65536- 50000)%256;EA=1; //开总中断ET0=1; //允许定时器0中断t0_crycle =0; //定时器中断次数计数单元}//LED处理函数void dis_led(){if (msecond_count<5){ _Ied1_bit =1;Ied2_bit =1;}else{led1_bit =0;led2_bit =0;}}〃***************************************************************//功能:把数据1显示在数码管1上void display6(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit6 =0; // 锁存数据delay_50us(40); dis_bit6 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display5(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit5 =0; // 锁存数据delay_50us(40);dis_bit5 =1;} _〃***************************************************************//功能:把数据1显示在数码管1上void display4(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit4 =0; // 锁存数据delay_50us(40);dis_bit4 =1;} 〃***************************************************************//功能:把数据1显示在数码管1上void display3(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit3 =0; // 锁存数据delay_50us(40);dis_bit3 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display1(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit1 =0; // 锁存数据delay_50us(40);dis_bit1 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display2(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit2 =0; // 锁存数据delay_50us(40);dis_bit2 =1;}〃******************************************************************* *******************************// 函数名称:void delay_50US(unsigned int t)//功能:延时50*t(us)void delay_50us(uint t){ _unsigned char j;for (;t >0;t --){for (j =19;j >0;j --);}}〃******************************************************************* ************〃8微秒延时基准程序void delay_8us(uint t){while (-- t);}************〃3微秒延时程序void delay_3us() {}〃******************************************************************* ************//子程序功能:向DS18B2写一字节的数据void w_1byte_ds18b20(uchar value){uchar i =0;for (i =0;i <8;i ++){dq_ds18b20 =1;delay_3us();dq_ds18b20 =0; delay_8us(2);if ( value & 0x01) dq_ds18b20 =1; 〃DQ = 1 delay_50us(1); // 延时50us 以上delay_8us(2);value >>=1;}dq_ds18b20 =1; //DQ = 1}//读一个字节uchar r_1byte_ds18b20( void){ 一一uchar i =0;uchar value = 0;for (i =0;i <8;i ++){value >>=1;dq_ds18b20 =0;// DQ_L;delay_3us();dq_ds18b20 =1; 〃DQ_H;delay_8us(2);if (dq_ds18b20==1) value |= 0x80;delay_8us(6); // 延时40us}dq_ds18b20 =1;return value ;}11 ・**************************************************〃ds18b20复位子程序void rest_ds18b20( void){rest:delay_3us(); // 稍做延时delay_3us();dq_ds18b20 =1;delay_3us();dq_ds18b20 =0;// DQ_L; delay_50us(11); 〃480us<T<960usdq_ds18b20 =1; // 拉高总线delay_8us(5);if (dq_ds18b20==1){return ;}delay_50us(2); // 延时90usif (dq_ds18b20==1){return ;}else{goto rest;}}〃****************************************************//读取温度void readtemp_ds18b20( void){ _uchar temp32;rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0x44); // 启动温度转换delay_8us(2);rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0xbe); //读取温度寄存器等(共可读9个寄存器)前两个就是温度templ =r_1byte_ds18b20();temph =r_1byte_ds18b20();if ((temph &0xf0)) //判断温度的正负性{temp_flag =0; //温度为负数标志temph =-temph;tempi =-templ;t_x =tabl3[templ & OxOf]; // 计算温度的小数temp32 =temph & OxOf;temp32 <<=4;tempi >>=4;temp32 =temp32 | tempi;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据5else //为正数{t_x =tabl3[templ & 0x0f]; // 计算温度的小数temp32 =temph & 0x0f;temp32 <<=4;templ >>=4;temp32 =temp32 | templ;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据temp_flag =1;} _}void dis_temp() //温度显示函数{ _if (temp_flag =1){ _if (t_b ==0){dis(12,12,t_s,t_g,13,12);}else{dis(12,t_b,t_s,t_g,13,12);}}else{dis(14,t_b,t_s,t_g,13,12);}}/ / """""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ############ //;子程序名:w_1byte_ds1302//;功能:向DS130写一个字节的数据void w_1byte_ds1302(uchar t){uchar i;for (i =0;i <8;i ++){if (t & 0x01){io_ds1302=1;}else{io_ds1302 =0;}clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();delay_3us();t >>=1;}}/ / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ######//;子程序名:r_1byte_ds1302()//;功能:从DS130读一个字节的数据uchar r_1byte_ds1302(){ 一一uchar i,temp11 =0;io_ds1302 =1;//置10为1,准备读入数据for (i =0;i <8;i ++){temp11 >>=1;if (io_ds1302) temp11 |= 0x80;clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();}return (temp11);}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""/ / , JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ """""""""""""""ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff//;子程序名:setbds1302//;功能:设置DS130初始时间,并启动计时void set_ds1302(){uchar i,j;rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); // 写控制命令字delay_3us();w_1byte_ds1302(0x00); // 写保护关闭clk_ds1302 =1;delay_3us();for (i =0,j =0x80;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(j);delay_3us();w_1byte_ds1302(tab23[i]);delay_3us();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();delay_3us();} _rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); delay_3us();w_1byte_ds1302(0x80); clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff //;子程序名:get1302void get_ds1302(){ _uchar temp11[7],i,j;for (i =0;i <7;i ++){temp11[i] =0;}for (i =0,j =0x81;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();delay_3us();w_1byte_ds1302(j);temp11[i] =r_1byte_ds1302();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();} _if (temp11[0] != 0xff){second_count =temp11[0]; }if (temp11[1] != 0xff) // 数据验证{minute_count =temp11[1]; }if (temp11[2] != 0xff) // 数据验证{hour_count =temp11[2]; }// date=temp[3];//mon th=temp[4];// week=temp[5];//year=temp[6];}/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>sbit dis_bit1 =P2A 7; //定义数码管控制口sbit dis_bit2 =卩2八6;//定义数码管控制口sbit dis_bit3 =卩2八4;//定义数码管控制口sbit dis_bit4 =卩2八3;//定义数码管控制口sbit dis_bit5 =卩2八1; //定义数码管控制口sbit dis_bit6 =P2A0; //定义数码管控制口sbit led1_bit =卩2八2; // 定时 LED 勺控制口sbit led2_bit =卩2八5; // 定时 LED 勺控制口sbit s1_bit =P1A0; // 定义S1 控制口sbit s2_bit =P01; // 定义 S2空制口sbit s3_bit =P02; // 定义 S3控制口sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口 void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t); //8US 延时基准程序void delay_50us(ui nt t); // void display1(uehardis_data); voiddisplay2(uehar dis_data); void display3(uehar dis_data); void display4(uehar dis_data); void display5(uehar dis_data); void display6(uehar dis_data);void init_t0(); //定时器0初始化函数void dis_led(); //LED 处理函数void judge_s1();//S1 按键处理函数 void judge_s2(); //S2 按键处理函数void judge_s3(); //S3 按键处理函数 void dis(uehar s6,uehar s5,uehar s4,uehar s3,uehar s2,uehar s1); 示子程序 void dis_sa n( uchar s6,uehar s5,uehar s4,uehar s3,uehars1,uchar san); 〃闪烁显示子程序void judge_dis(); //显示处理函数void judge_clock(); // 显示处理函数void set_ds1302(); // 设置时间void get_ds1302(); // 读取当前时间#define uehar#define uintunsigned char unsigned int延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序//数码管4显示子程序//数码管5显示子程序//数码管6显示子程序 //显s2,ueharvoid w_1byte_ds1302(uchar t); // 向DS130写一个字节的数据uchar r_1byte_ds1302(); // 从DS130读一个字节的数据〃*******************************************************************//DS18B20测温函数定义void w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位上电时默认的uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};//时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TR0 =1;//// set_ds1302();〃设置DS130的初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536- 50000)%256;t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒。
51单片机测并温显示

要求:测当前温度,并在数码管上显示晶振:11.0592MH程序如下:#include <reg52.h>#define uchar unsigned char#define uint unsigned intsbit DS=P2^2; //define interfaceuint temp; // variable of temperatureuchar flag1; // sign of the result positive or negativesbit dula=P2^6;sbit wela=P2^7;unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; unsigned char code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};void delay(uint count) //delay{uint i;while(count){i=200;while(i>0)i--;count--;}}void dsreset(void) //send reset and initialization command{uint i;DS=0;i=103;while(i>0)i--;DS=1;i=4;while(i>0)i--;}bit tmpreadbit(void) //read a bit{uint i;bit dat;DS=0;i++; //i++ for delayDS=1;i++;i++;dat=DS;i=8;while(i>0)i--;return (dat);}uchar tmpread(void) //read a byte date{uchar i,j,dat;dat=0;for(i=1;i<=8;i++){j=tmpreadbit();dat=(j<<7)|(dat>>1); //读出的数据最低位在最前面,这样刚好一个字节在DAT里}return(dat);}void tmpwritebyte(uchar dat) //write a byte to ds18b20{uint i;uchar j;bit testb;for(j=1;j<=8;j++){testb=dat&0x01;dat=dat>>1;if(testb) //write 1{DS=0;i++;i++;DS=1;i=8;while(i>0)i--;}else{DS=0; //write 0i=8;while(i>0)i--;DS=1;i++;i++;}}}void tmpchange(void) //DS18B20 begin change{dsreset();delay(1);tmpwritebyte(0xcc); // address all drivers on bustmpwritebyte(0x44); // initiates a single temperature conversion }uint tmp() //get the temperature{float tt;uchar a,b;dsreset();delay(1);tmpwritebyte(0xcc);tmpwritebyte(0xbe);a=tmpread();b=tmpread();temp=b;temp<<=8; //two byte compose a int variable temp=temp|a;tt=temp*0.0625;temp=tt*10+0.5;return temp;}void display(uint temp) //显示程序{uchar A1,A2,A2t,A3;A1=temp/100;A2t=temp%100;A2=A2t/10;A3=A2t%10;dula=0;P0=table[A1]; //显示百位dula=1;dula=0;wela=0;P0=0x7e;wela=1;wela=0;delay(1);dula=0;P0=table1[A2]; //显示十位dula=1;dula=0;wela=0;P0=0x7d;wela=1;wela=0;delay(1);P0=table[A3]; //显示个位dula=1;dula=0;P0=0x7b;wela=1;wela=0;delay(1);}void main(){uchar a;do{tmpchange();for(a=10;a>0;a--){display(tmp());}} while(1);}。
51单片机数码管显示0到99实验原理
51单片机数码管显示0到99实验原理51单片机是一种常用的单片机微控制器,它可以用来完成各种控制任务,包括数码管显示。
数码管是一种显示器件,可以用来显示数字、字母或符号等。
在本实验中,我们将使用51单片机控制数码管显示从0到99的数字。
实验原理如下:1. 51单片机介绍:51单片机是一种基于Intel 8051架构的微控制器。
它是一种具有48KB的程序存储器和52个输入/输出引脚的芯片。
单片机通过内部时钟和逻辑电路来执行各种任务。
2.数码管介绍:数码管是一种由LED组成的显示器件。
一般用于显示数字,通过控制LED的亮灭来显示不同的数字。
常见的数码管有共阳极和共阴极两种类型。
3.共阳极数码管原理:共阳极数码管的原理是通过控制不同的引脚来点亮相应的LED。
在显示数字0到9时,需要同时点亮特定的LED。
通过控制引脚为高电平来点亮对应的LED,其他引脚保持低电平。
4.共阴极数码管原理:共阴极数码管的原理与共阳极相反,需要使引脚为低电平来点亮相应的LED。
其他引脚保持高电平。
5. 51单片机控制数码管原理:通过设置51单片机的输出引脚和电平,可以控制数码管的显示。
首先需要将数码管的引脚连接到51单片机的输出引脚上,并设置相应的输出模式和电平。
然后通过程序来控制输出引脚的电平,从而控制数码管的亮灭。
实验步骤如下:1.连接电路:首先将51单片机与数码管进行连接。
根据具体的实验条件,选择合适的数码管和电路图。
2.编写程序:使用51单片机的编程软件(如Keil C等),编写控制数码管的程序。
程序应该包括初始化引脚、设置输出模式和控制引脚电平等内容。
3.烧录程序:将编写好的程序烧录到51单片机的程序存储器中。
通过编程软件将程序下载到单片机中。
4.检查电路:验证电路连接是否正确。
可以通过使用示波器或万用表等工具来检查引脚的电平和波形。
5.运行实验:将电路通电,观察数码管的显示效果。
通过控制程序中的循环和延时等参数,可以实现数字的滚动显示、闪烁显示等效果。
51单片机实验手册

51单片机实验手册一、概述51单片机是一种经典的8位微控制器,具有广泛的应用领域。
本实验手册旨在提供详细的实验指导,帮助初学者快速入门,并为进一步的学习提供基础。
二、实验准备在进行51单片机实验之前,我们需要准备以下材料:1. 一块51单片机开发板2. USB数据线或者串口线3. 电脑及编程软件4. 面包板及对应的连接线5. 红、绿、蓝LED以及相应的电阻三、实验一:LED闪烁LED闪烁是最基础的实验之一,通过控制51单片机的I/O口状态,使LED灯交替亮灭。
1. 连接电路将51单片机的VCC引脚连接到正极,GND引脚连接到负极,将LED的长脚连接到P1.0引脚,短脚连接到GND引脚。
2. 编写程序使用C语言编写如下程序:```c#include <reg52.h>void main() {while(1) {P1 = 0x00; // P1置低电平,LED灯熄灭Delay(1000); // 延时1秒P1 = 0xFF; // P1置高电平,LED灯点亮Delay(1000); // 延时1秒}}void Delay(unsigned int t) {while (t--);}```3. 烧录程序将编写好的程序通过编程软件下载到51单片机中。
4. 运行实验将USB数据线或串口线连接到51单片机开发板和电脑,将开发板上的开关打开,观察LED灯的闪烁情况。
四、实验二:数码管显示通过控制51单片机的I/O口状态,驱动数码管显示数字。
1. 连接电路将51单片机的VCC引脚连接到正极,GND引脚连接到负极,将数码管的A、B、C、D、E、F、G引脚分别连接到P1.0、P1.1、P1.2、P1.3、P1.4、P1.5、P1.6引脚。
2. 编写程序使用C语言编写如下程序:```c#include <reg52.h>unsigned char code segment[] = { // 数码管段码表0x3F, // 数字00x06, // 数字10x5B, // 数字20x4F, // 数字30x66, // 数字40x6D, // 数字50x7D, // 数字60x07, // 数字70x7F, // 数字80x6F // 数字9};void main() {unsigned int i;while(1) {for(i = 0; i < 10; i++) {P1 = segment[i]; // 依次在数码管上显示数字0-9 Delay(1000); // 延时1秒}}}void Delay(unsigned int t) {while (t--);}```3. 烧录程序将编写好的程序通过编程软件下载到51单片机中。
51单片机数码管显示程序设计
练习3主程序参考:
ORG 0000H LJMP START ORG 000BH LJMP T0SERV ;T0中断入口 ORG 0030H START: MOV SP,#50H ;初始化堆栈 LCALL INIT ;初始化 MOV DISBUF,#0 MOV DISBUF+1,#1 MOV DISBUF+2,#2 MOV DISBUF+3,#3 MOV DISBUF+4,#4 MOV DISBUF+5,#0 MOV FLASH,#11000000B MOV R0,#0 LOOP: MOV DISBUF+5,R0 LCALL DELAY INC R0 CJNE R0,#10,LOOP MOV R0,#0 AJMP LOOP
恢复现场
返回
动态显示参考程序1:定义变量
;--------------------------------------------------------;动态显示程序 ;--------------------------------------------------------;全局变量定义 FLAG EQU 20H ;标志位 DISSEG EQU P0 ;显示段驱动 DISBIT EQU P2 ;显示位驱动P2.7-P2.2 DISBUF EQU 21H ;显示缓冲区首地址21H-26H DISBITBUF EQU 27H ;当前显示位计数器0-5 FLASH EQU 28H ;闪烁控制xxxxxx00,将x=1闪烁,=0不闪 ;小数点的处理: ;若显示‘3’,缓冲区放‘3’,若显示‘3.’,缓冲区放‘3+80H’, 最高位为1 S_PULSE EQU FLAG.0 ;秒脉冲 CNT_2D5MS EQU 2FH ;2.5MS计数器 CNT_10MS1 EQU 30H ;10MS计数器 CN_0D5S EQU 31H ;0.5秒计数器 ;----------------------------------------------------------
51单片机(四位数码管的显示)程序
51单片机(四位数码管的显示)程序基于单片机V1或V2实验系统,编写一个程序,实现以下功能:1)首先在数码管上显示“P_ _ _”4个字符;2)等待按键,如按了任何一个键,则将这4个字符清除,改为显示“0000”4个字符(为数字的0)。
最佳答案下面这个程序是4x4距阵键盘,LED数码管显示,一共可以到0-F显示,你可以稍微改一下就可以实现你的功能了,如还有问题请发信息,希望能帮上你!#include<at89x52.h>unsigned char codeDig[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1 ,0x86,0x8e}; //gongyang数码管0-F 代码unsigned char k; //设置全局变量k 为键盘的键值/************************************键盘延时函数****************************/void key_delay(void) //延时函数{int t;for(t=0;t<500;t++);}/************************************键盘扫描函数******************************/void keyscan(void) //键盘扫描函数{unsigned char a;P2 = 0xf0; //键盘初始化if(P2!=0xf0) //有键按下?{key_delay(); //延时if(P2!=0xf0) //确认真的有键按下?{P2 = 0xfe; //使行线P2.4为低电平,其余行为高电平key_delay();a = P2; //a作为缓存switch (a) //开始执行行列扫描{case 0xee:k=15;break;case 0xde:k=11;break;case 0xbe:k=7;break;case 0x7e:k=3;break;default:P2 = 0xfd; //使行线P2.5为低电平,其余行为高电平a = P2;switch (a){case 0xed:k=14;break;case 0xdd:k=10;break;case 0xbd:k=6;break;case 0x7d:k=2;break;default:P2 = 0xfb; //使行线P2.6为低电平,其余行为高电平a = P2;switch (a){case 0xeb:k=13;break;case 0xdb:k=9;break;case 0xbb:k=5;break;case 0x7b:k=1;break;default:P2 = 0xf7; //使行线P2.7为低电平,其余行为高电平a = P2;switch (a){case 0xe7:k=12;break;case 0xd7:k=8;break;case 0xb7:k=4;break;case 0x77:k=0;break;default:break;}}}break;}}}}/****************************** ***主函数*************************************/ void main(void){while(1){keyscan(); //调用键盘扫描函数switch(k) //查找按键对应的数码管显示代码{case 0:P0=Dig[0];break;case 1:P0=Dig[1];break;case 2:P0=Dig[2];break;case 3:P0=Dig[3];break;case 4:P0=Dig[4];break;case 5:P0=Dig[5];break;case 6:P0=Dig[6];break;case 7:P0=Dig[7];break;case 8:P0=Dig[8];break;case 9:P0=Dig[9];break;case 10:P0=Dig[10];break;case 11:P0=Dig[11];break;case 12:P0=Dig[12];break;case 13:P0=Dig[13];break;case 14:P0=Dig[14];break;case 15:P0=Dig[15];break;default:break; //退出}}}/**********************************end***************************************/。
max7219驱动数码管程序(51单片机+STM32 MAX7219数码管程序案例)

SPI1_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB; //高位MSB在先
SPI1_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态,时钟悬空高
*功能:STM32_SPI1硬件配置初始化
*入口参数:无
*出口参数:无
*说明:STM32_SPI1硬件配置初始化,使用3V3
****************************************************************************/
void SPI1_Init(void)
SPI1_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//数据捕获于第二个时钟沿
SPI1_InitStructure.SPI_NSS = SPI_NSS_Soft;CPolynomial = 7;//CRC值计算的多项式
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOA,GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//SPI1相关引脚
51单片机实验报告
51单片机实验报告一、引言51单片机是一种广泛应用于嵌入式系统开发的微控制器芯片。
本实验旨在通过对51单片机的实验研究,加深对该芯片的理解和应用。
二、实验一:LED灯闪烁控制本实验通过编写程序,控制51单片机上的LED灯以特定的频率闪烁。
为了实现这个目标,我们首先需要了解51单片机的引脚布局,确定LED灯的连接方式。
然后,通过编写相应的汇编程序,控制引脚的电平变化,从而实现LED灯的闪烁。
三、实验二:数码管显示数码管是一种常见的输出设备,通过控制引脚的输出来显示特定的数字。
本实验中,我们通过编写程序,实现通过51单片机控制数码管的显示。
通过对数码管的驱动原理和编程的学习,我们可以灵活地控制数码管的显示内容和频率。
四、实验三:蜂鸣器发声蜂鸣器是一种常见的声音输出设备,通过控制引脚的输出来产生特定的声音。
本实验中,我们通过编写程序,实现通过51单片机控制蜂鸣器的发声。
通过学习蜂鸣器的驱动原理和编程,我们可以根据需要产生不同频率和节奏的声音。
五、实验四:温湿度检测温湿度检测是一种常见的环境监测需求。
本实验中,我们通过引入温湿度传感器,实现通过51单片机获取环境的温度和湿度信息。
通过编写程序和读取传感器的数据,我们可以实时监测环境的温湿度,并进行相应的控制和反馈。
六、实验五:红外遥控红外遥控是一种常见的无线通信方式,通过发送和接收红外信号来实现远程控制。
本实验中,我们通过引入红外发射和接收模块,实现通过51单片机进行红外遥控。
通过编写相应的程序,设置红外遥控的编码和解码方式,我们可以实现对外部设备的遥控操作。
七、实验六:定时器应用定时器是51单片机中的重要模块,它可以实现定时和计数等功能。
本实验中,我们通过学习定时器的工作原理和编程,实现通过51单片机进行定时和计数的应用。
通过编写相应的程序和设置定时器的参数,我们可以实现不同的定时和计数功能,满足各种需要。
八、实验七:串口通信串口通信是一种常见的数据通信方式,通过串口接口发送和接收数据。
以51单片机为核心的DS18B20的数码管显示温度程序+Proteus仿真
//DS18B20的读写程序,数据脚P3.3 ////温度传感器18B20汇编程序,采用器件默认的12位转化////最大转化时间750微秒,显示温度-55到+125度,显示精度////为0.1度,显示采用4位LED共阳显示测温值////P0口为段码输入,P24~P27为位选///***************************************************/#include "reg51.h"#include "intrins.h" //_nop_();延时函数用#define Disdata P0 //段码输出口#define discan P2 //扫描口#define uchar unsigned char#define uint unsigned intsbit DQ=P3^3; //温度输入口sbit DIN=P0^7; //LED小数点控制uint h;uchar flag;//**************温度小数部分用查表法***********//uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09};//uchar code dis_7[12]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf};//共阳LED段码表"0" "1" "2" "3" "4" "5" "6" "7" "8" "9" "不亮" "-" uchar code scan_con[4]={0x7f,0xbf,0xdf,0xef}; //列扫描控制字uchar data temp_data[2]={0x00,0x00}; //读出温度暂放uchar data display[5]={0x00,0x00,0x00,0x00,0x00}; //显示单元数据,共4个数据和一个运算暂用///////***********11微秒延时函数**********///void delay(uint t){for(;t>0;t--);}///***********显示扫描函数**********/scan(){char k;for(k=0;k<4;k++) //四位LED扫描控制{Disdata=0xff;Disdata=dis_7[display[k]];if(k==1){DIN=0;}discan=scan_con[k];delay(90);discan=0xff;}}/////***********18B20复位函数**********/ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();DQ=0; //delay(50); // 550usDQ=1; //delay(6); // 66uspresence=DQ; // presence=0继续下一步}delay(45); //延时500uspresence = ~DQ;}DQ=1;}/////**********18B20写命令函数*********///向1-WIRE 总线上写一个字节void write_byte(uchar val){uchar i;for (i=8; i>0; i--) //{DQ=1;_nop_();_nop_();DQ = 0;_nop_();_nop_();_nop_();_nop_();_nop_();//5us DQ = val&0x01; //最低位移出delay(6); //66usval=val/2; //右移一位}DQ = 1;delay(1);}///*********18B20读1个字节函数********///从总线上读取一个字节uchar read_byte(void){uchar i;uchar value = 0;for (i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ = 0; //_nop_();_nop_();_nop_();_nop_(); //4usDQ = 1;_nop_();_nop_();_nop_();_nop_(); //4us if(DQ)value|=0x80;delay(6); //66us}DQ=1;return(value);}///***********读出温度函数**********///read_temp(){ow_reset(); //总线复位write_byte(0xCC); // 发Skip ROM命令write_byte(0xBE); // 发读命令temp_data[0]=read_byte(); //温度低8位temp_data[1]=read_byte(); //温度高8位ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令}///***********温度数据处理函数**********/ void work_temp(){uchar n=0;uchar doth,dotl;uchar flag3=1,flag2=1; //数字显示修正标记if((temp_data[1]&0xf8)!=0x00){temp_data[1]=~(temp_data[1]);temp_data[0]=~(temp_data[0])+1;n=1;flag=1;}//负温度求补码if(temp_data[0]>255){temp_data[1]++;}display[4]=temp_data[0]&0x0f;display[0]=ditab[display[4]];doth=display[0]/10;dotl=display[0]%10;display[4]=((temp_data[0]&0xf0)>>4)|((temp_data[1]&0x07)<<4); display[3]=display[4]/100;display[2]=display[4]/10%10;display[1]=display[4]%10;if(!display[3]){display[3]=0x0a;flag3=0;if(!display[2]){display[2]=0x0a;flag2=0;}}//最高位为0时都不显示if(n){display[3]=0x0b;//负温度时最高位显示"-"flag3=0;}}/////**************主函数****************/main(){Disdata=0xff; //初始化端口discan=0xff;for(h=0;h<4;h++){display[h]=8;}//开机显示8888ow_reset(); // 开机先转换一次write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令for(h=0;h<500;h++){scan();} //开机显示"8888"2秒while(1){read_temp(); //读出18B20温度数据work_temp(); //处理温度数据scan(); //显示温度值2秒}}////*********************结束**************************//。
基于51单片机DS18B20温度采集器详解
一核心器件的基本构成及特性1.1 AT89S51功能特性89C51是INTEL公司MCS-51系列单片机中基本的产品,它采用INTEL公司可靠的CHMOS工艺技术制造的高性能8位单片机,属于标准的MCS-51的HCMOS产品。
它结合了HMOS的高速和高密度技术及CHMOS的低功耗特征,它基于标准的MCS-51单片机体系结构和指令系统,属于80C51基础型单片机版本,集成了时钟输出和向上或向下计数器等更多的功能。
89C51内置8位中央处理单元、256字节内部数据存储器RAM、8k片内程序存储器(ROM)32个双向输入/输出(I/O)口、3个16位定时/计数器和5个两级中断结构,一个全双工串行通信口,片内时钟振荡电路。
此外,89C51还可工作于低功耗模式,可通过两种软件选择空闲和掉电模式。
在空闲模式下冻结CPU 而RAM定时器、串行口和中断系统维持其功能。
掉电模式下,保存RAM数据,时钟振荡停止,同时停止芯片内其它功能。
89C51有PDIP(40pin)和PLCC(44pin)两种封装形式。
1.2 AT89S51管脚介绍AT89C51单片机是把那些作为控制应用所必需的基本内容都集成在一个尺寸有限的集成电路芯片上。
如果按功能划分,它由如下功能部件组成,即微处理器(CPU)、数据存储器(RAM)、程序存储器(ROM)、并行I/O口(4个8位I/O口)、串行口、定时器/计数器、中断系统及特殊功能寄存器。
它们都是通过片内单一总线连接而成,其基本结构依旧是微处理器(CPU)加上外围芯片的传统结构模式。
但对各种功能部件的控制是采用特殊功能寄存器的集中控制方式,以实现不同的功能。
AT89C51单片机如图所示。
1.1.1引脚功能介绍Vcc(40引脚):接+5V电源。
Vss(20引脚):接地。
XTAL1(19引脚):片内振荡器反相放大器和时钟发生器电路的输入端。
XTAL2(18引脚):片内震荡器反相放大器的输出端。
RST:复位引脚,高电平有效。
51单片机控制流水灯和数码管【精选】

流水灯的操作
2013.03.22
• 点亮第一个灯; • 让第一个灯闪烁; • 从第一个灯依次点亮至最后一个灯;Fra bibliotek动态显示
动态显示的特点是将所有位数码管的段选线并 联在一起,由位选线控制是哪一位数码管有效。选 亮数码管采用动态扫描显示。所谓动态扫描显示即 轮流向各位数码管送出字形码和相应的位选,利用 发光管的余辉和人眼视觉暂留作用,使人的感觉好 像各位数码管同时都在显示。动态显示的亮度比静 态显示要差一些,所以在选择限流电阻时应略小于 静态显示电路中的。
C语言中的<<和>>
• 每执行一次<<操作,被操作数高位数丢失, 低位补零;
C语言中的<<和>>
• 每执行一次<<操作,被操作数低位数丢失, 高位补零;
任务
• 第一次一个管亮流动一次,第二次两个管 亮流动,依次到8个管亮,然后重复整个过 程。
• 先奇数亮再偶数亮,循环三次;一个灯上 下循环三次;两个分别从两边往中间流动 三次;再从中间往两边流动三次;8个全部 闪烁3次;关闭发光管,程序停止。
• 用8个发光管演示出8位二进制数累加过程。
呼吸灯的操作
• 灯光在微电脑控制之下完成由亮到暗的逐 渐变化,感觉像是在呼吸。
• 实现灯不同亮度的两种方法: 1 调节灯的保护电阻, 2 使用PWM。
数码管的操作
• 数码管的介绍 • 数码管的操作
g f GNDa b a
a
b
51单片机数码管显示实验报告
51单片机数码管显示实验报告实验目的:1.学习51单片机的编程方法和硬件连接方法;2.掌握使用51单片机驱动数码管显示的方法。
实验器材:1.51单片机开发板;2.公共阳极共阳向数码管一个;3.若干杜邦线。
实验原理:数码管是一种数字显示器件,由7个发光二极管和若干个选通器件构成。
每个发光二极管可以发出两种颜色的光,通常使用红色和绿色。
这篇实验报告以共阳数码管为例,共阳数码管的每个发光二极管的阳极都连接到电源VCC上,而七个阴极分别用来选择一些数字进行显示。
当要选择一些数码管显示时,需要对对应的阴极进行低电平使能,而使能其他阴极保持高电平,这样就可以通过控制每个数码管的阴极低电平使能来选择要显示的数字。
实验步骤:1.将51单片机开发板上的数码管连接到51单片机开发板的P1口和P0口上,连接方式如下图所示:```-----------------VCC-P0.0--,a,-----------------P0.1--,b,------P0.2--,c,---,数字2P0.3--,d,------P0.4--,e,------P0.5--,f,---,数字1P0.6--,g,------P0.7--,h,-----------------------P1.0P1.1```2. 在Keil µVision中新建工程,编写程序。
3.利用P0口控制数码管的阴极,利用P1口选择数码管要显示的数字。
4.在主程序中循环选择每个数码管,并通过P0口设置要显示的数字。
实验结果:```---------------------------------P1.0P1.1P0.6P0.7空空数字2数字1abcdefgh---------------------------------```实验结论:通过本次实验,学习了51单片机的编程方法和硬件连接方法,并掌握了使用51单片机驱动数码管显示的方法。
同时,还了解了数码管的工作原理和编程的基本步骤。
51单片机设计数字温度计(流程图+源码+实物图片)
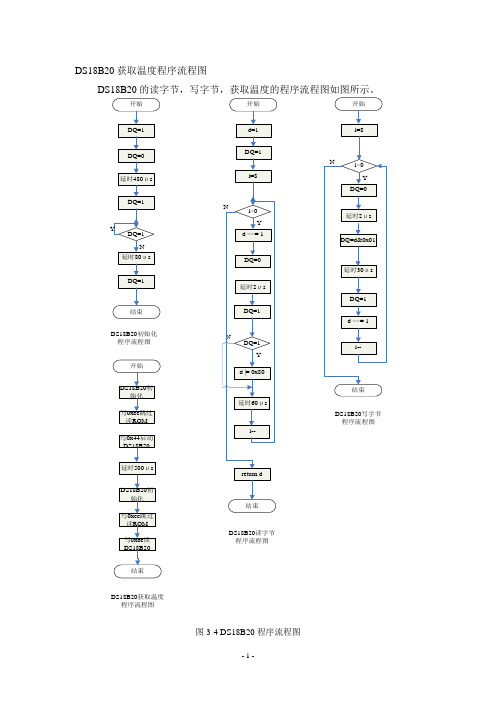
DS18B20获取温度程序流程图DS18B20的读字节,写字节,获取温度的程序流程图如图所示。
DS18B20初始化程序流程图DS18B20读字节程序流程图DS18B20写字节程序流程图DS18B20获取温度程序流程图图3-4 DS18B20程序流程图显示程序设计显示电路是由四位一体的数码管来实现的。
由于单片机的I/O 口有限,所以数码管采用动态扫描的方式来进行显示。
程序流程图如图所示。
图显示程序流程图按键程序设计按键是用来设定上下限报警温度的。
具体的程序流程图如图所示。
N图按键程序流程图附1 源程序代码/********************************************************************* 程序名; 基于DS18B20的测温系统* 功能:实时测量温度,超过上下限报警,报警温度可手动调整。
K1是用来* 进入上下限调节模式的,当按一下K1进入上限调节模式,再按一下进入下限* 调节模式。
在正常模式下,按一下K2进入查看上限温度模式,显示1s左右自动* 退出;按一下K3进入查看下限温度模式,显示1s左右自动退出;按一下K4消除* 按键音,再按一下启动按键音。
在调节上下限温度模式下,K2是实现加1功能,* K1是实现减1功能,K3是用来设定上下限温度正负的。
* 编程者:ZPZ* 编程时间:2009/10/2*********************************************************************/#include<AT89X52.h> //将AT89X52.h头文件包含到主程序#include<intrins.h> //将intrins.h头文件包含到主程序(调用其中的_nop_()空操作函数延时)#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)uchar max=0x00,min=0x00; //max是上限报警温度,min是下限报警温度bit s=0; //s是调整上下限温度时温度闪烁的标志位,s=0不显示200ms,s=1显示1s左右bit s1=0; //s1标志位用于上下限查看时的显示void display1(uint z); //声明display1()函数#include"ds18b20.h" //将ds18b20.h头文件包含到主程序#include"keyscan.h" //将keyscan.h头文件包含到主程序#include"display.h" //将display.h头文件包含到主程序/***********************主函数************************/void main(){beer=1; //关闭蜂鸣器led=1; //关闭LED灯timer1_init(0); //初始化定时器1(未启动定时器1)get_temperature(1); //首次启动DS18B20获取温度(DS18B20上点后自动将EEPROM中的上下限温度复制到TH和TL寄存器)while(1) //主循环{keyscan(); //按键扫描函数get_temperature(0); //获取温度函数keyscan(); //按键扫描函数display(temp,temp_d*0.625);//显示函数alarm(); //报警函数keyscan(); //按键扫描函数}}/********************************************************************* 程序名; __ds18b20_h__* 功能:DS18B20的c51编程头文件* 编程者:ZPZ* 编程时间:2009/10/2* 说明:用到的全局变量是:无符号字符型变量temp(测得的温度整数部分),temp_d* (测得的温度小数部分),标志位f(测量温度的标志位‘0’表示“正温度”‘1’表* 示“负温度”),标志位f_max(上限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位f_min(下限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位w(报警标志位‘1’启动报警‘0’关闭报警)。
51单片机数码管的程序代码
}
3.依次流水作业
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit line= P1^3; //点阵
sbit led= P1^2;
duan=1; P0=table[shi]; _nop_();
//显示十位
_nop_(); _nop_(); duan=0; P0=0xff; wei=1; P0=0xFb; wei=0; delay(3);
duan=1; P0=table[ge]; _nop_(); _nop_(); _nop_(); duan=0; P0=0xff; wei=1; P0=0xF7; wei=0; delay(3);
unsigned char code weisn[]=
{
0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
uint y,s,a,b;
void delay ( uint);
void main ()
{
P0=0X00;
line=0;//关闭点阵
P0=0xff; led=0;//关闭 led
5,DS18B20 温度计程序代码
#include "reg52.h"
#include "intrins.h"
#define uchar unsigned char
#define uint unsigned int
sbit ds=P1^4; //18B20 信号端口 sbit duan=P1^0; //数码管段码控制端
51单片机(四位数码管的显示)程序
51单片机(四位数码管的显示)程序基于单片机V1或V2实验系统,编写一个程序,实现以下功能:1)首先在数码管上显示“P_ _ _”4个字符;2)等待按键,如按了任何一个键,则将这4个字符清除,改为显示“0000”4个字符(为数字的0)。
最佳答案下面这个程序是4x4距阵键盘,LED数码管显示,一共可以到0-F显示,你可以稍微改一下就可以实现你的功能了,如还有问题请发信息,希望能帮上你!#include<at89x52.h>unsigned char codeDig[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1 ,0x86,0x8e}; //gongyang数码管0-F 代码unsigned char k; //设置全局变量k 为键盘的键值/************************************键盘延时函数****************************/void key_delay(void) //延时函数{int t;for(t=0;t<500;t++);}/************************************键盘扫描函数******************************/void keyscan(void) //键盘扫描函数{unsigned char a;P2 = 0xf0; //键盘初始化if(P2!=0xf0) //有键按下?{key_delay(); //延时if(P2!=0xf0) //确认真的有键按下?{P2 = 0xfe; //使行线P2.4为低电平,其余行为高电平key_delay();a = P2; //a作为缓存switch (a) //开始执行行列扫描{case 0xee:k=15;break;case 0xde:k=11;break;case 0xbe:k=7;break;case 0x7e:k=3;break;default:P2 = 0xfd; //使行线P2.5为低电平,其余行为高电平a = P2;switch (a){case 0xed:k=14;break;case 0xdd:k=10;break;case 0xbd:k=6;break;case 0x7d:k=2;break;default:P2 = 0xfb; //使行线P2.6为低电平,其余行为高电平a = P2;switch (a){case 0xeb:k=13;break;case 0xdb:k=9;break;case 0xbb:k=5;break;case 0x7b:k=1;break;default:P2 = 0xf7; //使行线P2.7为低电平,其余行为高电平a = P2;switch (a){case 0xe7:k=12;break;case 0xd7:k=8;break;case 0xb7:k=4;break;case 0x77:k=0;break;default:break;}}}break;}}}}/****************************** ***主函数*************************************/ void main(void){while(1){keyscan(); //调用键盘扫描函数switch(k) //查找按键对应的数码管显示代码{case 0:P0=Dig[0];break;case 1:P0=Dig[1];break;case 2:P0=Dig[2];break;case 3:P0=Dig[3];break;case 4:P0=Dig[4];break;case 5:P0=Dig[5];break;case 6:P0=Dig[6];break;case 7:P0=Dig[7];break;case 8:P0=Dig[8];break;case 9:P0=Dig[9];break;case 10:P0=Dig[10];break;case 11:P0=Dig[11];break;case 12:P0=Dig[12];break;case 13:P0=Dig[13];break;case 14:P0=Dig[14];break;case 15:P0=Dig[15];break;default:break; //退出}}}/**********************************end***************************************/。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//项目:数码管温度显示器//编写:LGY//功能:数码管显示温度#include"reg52.h"#include"intrins.h"#define uchar unsigned char#define uint unsigned int//******************位定义*******************************//sbit RX =P3^0;sbit TX =P3^1;sbit RX_TX_con =P3^2;//sbit Fre_check =P3^5;sbit DQ =P3^5;sbit SDA =P3^6;sbit SCL =P3^7;sbit LED_1 =P0^2;sbit LED_2 =P0^0;sbit LED_3 =P0^1;sbit LED_4 =P0^3;unsigned char a1,a2,a3,a4;unsigned int temper;unsigned char code displaycode[]={// 0 1 2 3 4 5 6 7 8 90x28, 0xee, 0x32, 0xa2, 0xe4, 0xa1, 0x21, 0xea, 0x20, 0xa0,};unsigned char code displaycode1[]={// 0. 1. 2. 3. 4. 5. 6. 7. 8. 9.0x08, 0xce, 0x12, 0x82, 0xc4, 0x81, 0x01, 0xca, 0x00, 0x80, };void INT(){P0=0xff;P1=0xff;P2=0;P3=0;DQ=1;// Fre_check=1;}void Delay(uint x){uint a,b;for(a=x;a>0;a--)for(b=110;b>0;b--);}/*void Delay1(uint x,uchar y){uint i;uchar j;for(i=x;i>0;i--);for(j=y;j>0;j--);}void reset(){unsigned char st=1;Fre_check=1;//_nop_();//_nop_();while(st){Fre_check=0;Delay1(70,30);Fre_check=1;Delay1(4,4);if(Fre_check==1) st=1;else st=0;Delay1(50,10);}}void write_byte(unsigned char date){unsigned char temp,i;Fre_check=1;//_nop_();//_nop_();for(i=8;i>0;i--){temp=date&0x01;Fre_check=0;//Delay1(1);_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();if(temp==1) Fre_check=1;Delay1(2,2);Fre_check=1;date=date>>1;}}unsigned char read_byte(){unsigned char i,date;static bit j;for(i=8;i>0;i--){date=date>>1;Fre_check=1;_nop_();_nop_();Fre_check=0;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();Fre_check=1;_nop_();_nop_();_nop_();_nop_();j=Fre_check;if(j==1) date=date|0x08;Delay1(1,1);}return (date);}*/void delay1(int b){int s;for (s = 0; s <b; s++);}unsigned char ow_reset(void){unsigned char presence;DQ = 0; //pull DQ line lowdelay1(29); // leave it low for 480μsDQ = 1; // allow line to return highdelay1(3); // wait for presencepresence = DQ; // get presence signaldelay1(25); // wait for end of timeslotreturn(presence); // presence signal returned} // presence = 0, no part = 1unsigned char read_bit(void){unsigned char i;DQ = 0; // pull DQ low to start timeslotDQ = 1; // then return highfor (i = 0; i < 3; i++); // delay 15μs fromstart of timeslot return(DQ); // return value of DQ line}void write_bit(char bitval){DQ = 0; // pull DQ low to start timeslotif(bitval==1) DQ =1; // return DQ high if write 1delay1(5);// hold value for remainder of timeslotDQ = 1;}// Delay provides 16μs per loop, plus 24μs//Therefore, delay(5) = 104μsunsigned char read_byte(void){unsigned char i;unsigned char value = 0;for (i = 0; i < 8; i++){if(read_bit()) value=value|0x01<<i;// reads byte in, one byte at a time and then// shifts it leftdelay1(6); // wait for rest of timeslot}return(value);}void write_byte(char val){unsigned char i;unsigned char temp;for (i = 0; i < 8; i++) // writes byte, one bit at a time{temp = val>>i; // shifts val right ‘i’ spacestemp &= 0x01; // copy that bit to tempwrite_bit(temp); // write bit in temp into}delay1(5);}void DisplayLed(uchar num1,uchar num2,uchar num3,uchar num4){LED_1=0;LED_2=1;LED_3=1;LED_4=1;P1=displaycode[num1];Delay(3);LED_1=1;LED_2=0;LED_3=1;LED_4=1;P1=displaycode1[num2];Delay(3);LED_1=1;LED_2=1;LED_3=0;LED_4=1;P1=displaycode[num3];Delay(3);LED_1=1;LED_2=1;LED_3=1;LED_4=0;P1=displaycode[num4];Delay(3); }void Get_tem(){unsigned char tem1,tem2,num;float aaa;int temper;ow_reset(); //复位write_byte(0xCC);//跳过ROMwrite_byte(0x44);//温度转换for(num=1000;num>0;num--)DisplayLed(a1,a2,a3,a4);ow_reset();write_byte(0xCC);write_byte(0xBE);tem1=read_byte();tem2=read_byte();aaa=(tem2*256+tem1)*6.25;temper=(int)aaa;a1=temper/1000;a2=temper%1000/100;a3=temper%100/10;a4=temper%10;}void main(){unsigned char num=0;INT();while(1){Get_tem();}}。