基于状态机的远程控制技术
基于状态标注的协议状态机逆向方法
第 1ቤተ መጻሕፍቲ ባይዱ 期
黄笑言等: 基于状态标注的协议状态机逆向方法
3487
检测状态的前一状态和随后的状态来区分由同一特征值表示 的不等状态, 避免构建出的状态机产生错误的报文序列 。 2011 年,Wang 等[12] 提 出 了 协 议 的 概 率 状 态 机 ( Probabilistic Protocol State Machine, PPSM ) 模型构建单方向 网流的状态机。PPSM 首先利用统计学的方法找到网流中最 频繁的 字 符 串; 而 后 利 用 围 绕 中 心 点 的 划 分 ( Partitioning Around Medoids, PAM) 聚类方法获取协议的状态关键字 , 根据 关键字为每一个数据包分配状态类型 ; 最后以概率的形式描 构建概率协议状态机。 述状态之间的转换, 2009 年, Comparetti 等[13] 综合利用网流级和指令级的信 息提出了完整的协议逆向方案 Prospex, 为客户端的输出报文 逆向状态机, 旨在识别表示相似应用情景的状态 。 首先利用 抽取每个报文的格式, 继而结合格式 指令执行序列分析技术 , 特征和执行特征对报文进行聚类 , 抽取更普遍的报文格式 , 识 别会话中的每个报文类型 ; 然后构建增广前缀树 ( Augmented Prefix Tree Acceptor, APTA) 接受网络会话中的所有报文类型 继而从观察到的会话中抽取报文类型之间的顺序特征 , 序列, 以正则表达式表示, 称为先决条件; 接着对 APTA 的每个状态 用那个状态允许输入的报文类型集合进行标注 , 表示其符合 ; Exbar 算法将 先决条件的 可 接 受 的 报 文 类 型 集 最 后 使 用 APTA 最小化。 以上依据网流级状态机逆向的方法有以下不足 : Trifilo 等 的方法依赖于各种报文类型字段在报文格式的同字节 偏移位置上出现, 不适于报文类型字段的字节位置不固定的 [12 ] 文本协议; Wang 等 的方法适于文本协议, 但是只依据频繁 没有区分字符串之间的层次 , 无法准确 字符串标识报文状态, 提取出报文的语义字段 。 另外, 目前构建状态机的方法都是先构建一棵状态前缀 再利用启发式方法进行状态机的合并和简化 , 这会导致初 树, 始构建的状态机过于庞大 , 并且在状态机简化过程中容易导 致路径的错误合并, 无法准确地描述报文类型之间的时序关 系。 为解决以上问题, 本文依据网络流的分析提出一种面向 文本类协议的状态机逆向方法 。首先利用语义关键字的分布 特征和偏移属性提取语义关键字 , 识别出会话中的报文类型 ; 然后利用有向图的邻接矩阵描述报文类型之间的时序关系 , 进行状态标注; 最后实现协议状态机的逆向 , 体现协议行为逻 辑。其流程如图 1 所示。
基于Android的手机远程控制系统设计与实现

基于Android的手机远程控制系统设计与实现作者:杨珺婷徐建华冯佳程建金来源:《电脑知识与技术》2021年第32期摘要:人工智能时代已经来临,智能手机全面普及。
针对教师在课堂上对学生玩手机难以有效管理的问题,该文采用Socket线程池、多线程、跨平台和多端同收同发等关键技术,设计并开发了基于Android的手机远程控制系统。
测试结果表明,本系统可以远程对学生手机进行锁屏,同时协助教师对学生自动完成考勤,提高了课堂管理效率,有效避免了学生在课堂上玩手机。
关键词:Android;手机管理;Socket;线程池;锁屏;考勤中图分类号:TP391 文献标识码: A文章编号:1009-3044(2021)32-0061-021 引言人工智能时代,智能手机已经普及。
通过智能手机,人们可以实现移动支付、玩游戏、观看视频、听音乐等等。
在课堂上,学生因玩手机影响听课的情况也越来越普遍。
针对这一情况,老师们通过要求关闭或上交手机等手段管理学生,但这些管理手段效果不明显。
为了解决目前普遍出现的这一问题,本文开放一款能够结合课堂管理,合理约束手机,并且需要拥有良好的结构体系、具备扩展性、维护成本较低的手机远程管理系统。
本手机远程控制系统是采用基于Socket实现即时通信交互,并综合使用多线程、Socket线程池、跨平台、多端同收同发技术。
在此本手机远程控制系统涉及的关键技术进行阐述。
2.1 Socket通信技术Socket是在TCP/IP网络协议的应用层和传输层之间的一个抽象层,它把复杂的操作抽象为几个简单接口,供应用层调用,实现进程在网络中的通信。
Socket起源于UNIX,在Unix一切皆文件的思想下,进程间通信就被冠名为文件描述符,Socket是一种“打开——读/写——关闭”模式的实现,服务器和客户端各自维护一个“文件”,在建立连接打开后,可以向文件写入内容供对方读取或者读取对方内容,通讯结束时关闭文件。
2.2 Socket线程池使用concurrent包下的ExecutorService类设定线程池,并对每一个连接创建一个专用的Socket实体。
基于物联网的远程控制系统的设计与实现

基于物联网的远程控制系统的设计与实现随着科技的不断发展和进步,人们对于生活质量以及便捷性的要求也在不断提升。
在这个快节奏的社会中,物联网技术的应用已经见到了广泛应用。
在物联网技术中,远程控制系统是一项非常实用的应用,它可以帮助用户远程控制家庭电器等设备,提高生活效率和便捷性。
在本文中,我们将重点介绍基于物联网技术的远程控制系统的设计与实现,帮助读者更好的理解物联网技术的应用和发展。
一、概述远程控制系统是一种基于无线网络或互联网等远程及时监控和控制各种设备的技术,可以实现在任何时间和地点对设备的控制和监测。
物联网技术的发展使得远程控制系统的应用变得更加便捷和实用,可以应用于家居、商业以及工业等不同领域。
物联网技术的基础中,可穿戴设备、传感器等设备的发展和不断创新,使得远程控制系统的应用更具实用性,助力于现代化社会的发展和进步。
二、系统设计在系统设计环节中,需要考虑到远程控制系统所需要实现的功能,设计出基于物联网的远程控制系统。
系统设计的关键点主要涉及到硬件设备的选择和软件开发的实现,其中硬件设备主要涉及传感器、通信模块、嵌入式系统等。
软件开发主要涉及到应用程序的设计和开发。
1. 传感器选择在设备控制过程中,传感器被用来探测物体的各种状态和参数,包括温度、湿度、光照、声音、位置等参数。
因此选用合适的传感器是基本的步骤。
比如当我们需要控制空调温度时,选用温度传感器,当需要控制照明时,选用光照传感器等。
在选择传感器时,还需要考虑传感器的通信协议和接口,以实现数据传输和接收到外部控制命令。
2. 通信模块选择基于物联网的远程控制系统需要通过网络进行数据传输和接收控制命令。
在通信模块上,需要选择合适的无线通信模块,如无线Wi-Fi、蓝牙、红外线等。
通信模块的性能和稳定性也是设计环节中需要注意的重要点,选择合适通信模块有利于保证系统的可靠性和高效性。
3. 嵌入式系统选择在外围设备中,嵌入式处理器是控制设备的核心部分,由于数据量大、处理速度快等特点,嵌入式系统被广泛应用在各个领域中。
远程控制的实现基础
81、远程唤醒基本原理当远程计算机处于关机状态时,需要在本地计算机上运行唤醒软件,向网络中发送带有该网卡MAC地址的特殊唤醒数据包。
被唤醒的计算机确定是发送给自己的,则通过电路连线想计算机发出看机信号2、Socket的基本概念(1)网间进程通信要解决的是不同计算机进程间的相互通信问题(2)服务方式服务是描述相邻层之间关系的抽象概念。
即网络中各层想紧邻上层提供的一组操作。
下层是服务提供者,上层是请求服务的用户。
(3)客户机/服务器模式客户想服务器发出请求,服务器接收到请求,提供相应的服务。
3、Socket类型(1)流式套接字(SOCK_STREAM)提供一种可靠的面向连接的数据传输方法,数据无差错、无重复的发送,且按发送的顺序进行接收。
(2)数据报套接字(SOCK_DGRAM)提供一种不可靠的、非连接的数据包(Packet)通信方式4、基本套接字函数调用大多数的数据报套接字应用程序都使用一个规定的时间序列来完成客户应用程序与服务器应用程序间的通信Client Serversocket() socket()bind()sendTo() ----> resvfrom()resvfrom()<----- sendto()closeSocket()closeSocket()(1)创建套接字Socket pascal far socket(int af,int type,int protocol);af:指定通信发生的区域type:描述要建立的套接字的类型,指流式套接还是数据报套接字protocol:该套接字使用的特定协议,如果设为0,则表示使用默认的连接模式注:Socket()方法根据这3个参数建立一个套接字,并将相应的资源分配给他,同时返回一个整型套接字句柄(2)指定本地地址bind()将套接字地址(包括本地主机地址和本地端口地址)与所创建的套接字编号联系起来,即将名字赋予套接字int Pascal far bind(socket s,const struct sockadrr FAR * name,int namelen);s:是由socket()函数调用返回并且未做连接的套接字句柄;name:是付给套接字s的本地地址(名字),长度可变,结构随通信域的不同而不同namelen:指参数name的长度调用成功时,返回0,否则返回socket_errro(3)建立套接字连接使用connect()和accpt()来完成一个完整相关的建立,connect()用于建立连接,accpt()用于使服务器等待来自某客户进程的实际连接connect():int Pascal far connect(Socket s,const struct sockaddr FAR*n ame,int namelen);s:指要建立连接的本地套接句柄name:值对方套接字地址结构的指针,对法套接字地址长度由参数nameLe n说明注:调用成功函数返回0,否则返回Socket_Error .在面向连接的协议中,该函数调用导致本地系统和外部系统之间连接的实际建立accpt():Socket pascal far accpt(Scoket s,struct sockaddr Far * addr,int F AR * addrlen);s:本地套接字句柄,在用作accpt()函数调用的参数前应该先调用过listen() addr:是指向客户方套接字地址结构的指针,用来接收连接实体的地址addrlen:为客户方套接字地址的长度(字节数);调用成功,accpt()函数返回一个socket类型的值,表示接收到的套接字的句柄,否则返回INVALD_SOCKET(4)监听连接:建立连接后,服务端套接字要调用listen()函数,此电泳用于面向连接服务器,表明他愿意接收连接。
远程控制原理

远程控制原理远程控制是指通过无线电、红外线、网络等技术手段,实现对设备或系统的远程操作和控制。
远程控制技术在现代社会得到了广泛应用,它为我们的生活和工作带来了诸多便利。
本文将就远程控制的原理进行介绍和分析,以便更好地理解和应用远程控制技术。
首先,远程控制的原理是基于信号传输和信息交互的。
无论是通过无线电、红外线还是网络,远程控制都需要通过信号传输来实现。
在远程控制系统中,发送端将控制指令转换成相应的信号,通过无线电波、红外线或者网络传输到接收端,接收端再将信号转换成控制指令,从而实现对被控制设备或系统的操作。
这种信号的传输和信息的交互是远程控制的基本原理,也是其能够实现远程操作的关键。
其次,远程控制的原理还涉及到控制指令的编码和解码。
在远程控制系统中,发送端将控制指令编码成特定的信号格式,接收端则需要对接收到的信号进行解码,还原成原始的控制指令。
这种编码和解码的过程是远程控制能够准确传输和执行控制指令的前提,也是远程控制原理的重要组成部分。
另外,远程控制的原理还包括了对信号的稳定传输和抗干扰能力的要求。
无论是无线电、红外线还是网络,信号的稳定传输对于远程控制来说至关重要。
只有信号能够稳定地传输到接收端,才能保证控制指令的准确执行。
同时,远程控制系统还需要具备一定的抗干扰能力,能够在复杂的环境中保持信号的稳定传输,确保远程控制的可靠性和稳定性。
最后,远程控制的原理还涉及到对被控制设备或系统的响应和执行能力。
在远程控制系统中,被控制设备或系统需要能够准确地接收并执行控制指令,实现远程操作。
因此,远程控制的原理还包括了对被控制设备或系统的响应速度、执行准确性和稳定性的要求。
综上所述,远程控制的原理是基于信号传输和信息交互的,涉及到控制指令的编码和解码、信号的稳定传输和抗干扰能力,以及对被控制设备或系统的响应和执行能力。
了解远程控制的原理,有助于我们更好地理解和应用远程控制技术,为我们的生活和工作带来更多的便利和效益。
基于Harel状态机的高校IP语音答疑系统设计
பைடு நூலகம்
方式 对于大 学的一 些基础 课 、公 共课特 别有帮 助 。
为 了实现 We 呼 叫中 心的C I 制功 能需 要 自 b T控
己 设 计 一种 流 程 控 制 语 言 ,在研 究 了常 用 的 呼 叫
中心 技 术后 发 现 在 进 行 呼 叫 中心 的开 发 中普 遍采 用状 态机 理 论 进 行 设 计 和 开 发 ,但 是 标 准 的 状 态
、 l
訇
基 于 H rl 态 机 的 高校 I语 音 答 疑 系 统设 计 ae 状 P
The des gn o P-vr fow i f I i l based on m ul i o t m daIi er nt act on s a e achi e i t t m n
Doi 1 3 6 / .s n. 0 -0 4. 0 1 2 上 ). 9 : 9 9 J is 1 9 1 0. 0 3 21 . ( 6
文 章 编 号 :1 0 - 14 2 1 ) ( ) 2 2 9 0 ( 0 2上 一0 1-0 0 3 1 3
0 引言
传 统 的 呼 叫 中 心 是企 业 、行 政 机 关 等提 供 客 户 服 务 的 重 要手 段 之 一 ,在 高 等 院 校 由于 网络 条 件 比较 好 ,一 般 都 是 使 用 I tr e来 实现 各 种 服 nen t 务 , 例 如 办 公 系 统 、 教 务 管 理 系统 、 学 籍 管 理 系统 等 , 此外 如 网站 、 电子 邮件 、社 区论 坛 等也
程 ,在 答 疑 的过 程 中可 以分 组 、 排 队 等 功 能 , 建 立 WEB呼 叫 中 心 的好 处 还 可 以把 各 种 接 入 方 式 集 中 到 一 个 统 一 的 门户 中 用 于 提 高 高 校 的 教 学 质 量 ,通 过 自动 或 人 工 的 方 式 对 学 生 的 问 题 进
远程控制基本原理

远程控制基本原理
远程控制是指通过网络或无线电信号等方式,对远程设备进行操作和控制的一种技术。
其基本原理包括以下几个方面:
1.通信协议:远程控制需要建立一定的通信协议,使得控制指令可以被传输到远程设备中。
通信协议可以是标准化的协议,如TCP/IP 等,也可以是自定义协议。
2.传输介质:远程控制需要选择合适的传输介质,如有线网络、无线网络、蓝牙、红外线等。
不同的传输介质有不同的特点和适用范围,需要根据实际需求进行选择。
3.远程控制软件:远程控制软件是实现远程控制的关键。
它需要能够将用户的控制指令转化为符合通信协议的数据包,并将其发送到远程设备中。
同时,还需要能够接收远程设备返回的状态信息,并将其显示给用户。
4.安全机制:远程控制需要考虑安全机制,防止未经授权的人对设备进行非法操作。
可以采用加密技术、身份认证等措施,确保控制指令只能由授权用户发出。
总之,远程控制的基本原理是通过建立通信协议、选择合适的传输介质、使用远程控制软件以及加强安全措施等方式,实现对远程设备的操作和控制。
- 1 -。
基于Java开发的智能家居控制系统设计与实现
基于Java开发的智能家居控制系统设计与实现智能家居控制系统是一种集成了物联网、人工智能等先进技术的智能化系统,通过对家居设备的远程监控和控制,实现智能化、便捷化的生活体验。
本文将介绍基于Java开发的智能家居控制系统的设计与实现过程。
一、系统架构设计智能家居控制系统的架构设计是整个系统开发的基础,一个合理的架构设计可以提高系统的稳定性和可扩展性。
在基于Java开发的智能家居控制系统中,通常采用MVC(Model-View-Controller)架构模式。
模型(Model):模型负责处理业务逻辑和数据存取,包括传感器数据采集、设备状态管理等功能。
视图(View):视图负责用户界面的展示,用户可以通过视图与系统进行交互,实现对家居设备的监控和控制。
控制器(Controller):控制器负责接收用户输入,并调用模型进行业务处理,最后更新视图展示最新的数据。
二、技术选型在基于Java开发的智能家居控制系统中,需要选择合适的技术栈来支撑系统的开发和运行。
以下是一些常用的技术选型:Spring框架:Spring框架是Java领域最流行的开源框架之一,提供了依赖注入、AOP等功能,可以简化开发流程。
Spring Boot:Spring Boot是Spring框架的一个子项目,可以快速搭建基于Spring的应用程序。
MySQL数据库:作为关系型数据库,MySQL被广泛应用于Java项目中,用于存储用户信息、设备状态等数据。
Redis缓存:Redis是一种内存数据库,可以提高系统对数据的读写速度。
三、功能设计与实现1. 用户管理用户管理是智能家居控制系统中重要的功能之一,用户可以通过注册登录来管理自己的家居设备。
在Java开发中,可以使用Spring Security框架来实现用户认证和权限管理。
2. 设备管理设备管理模块负责对家居设备进行管理,包括设备添加、删除、状态查询等功能。
通过与传感器和执行器进行交互,实现对设备状态的监控和控制。
单片机远程控制系统的设计及其应用
单片机远程控制系统的设计及其应用一、引言单片机远程控制系统是一种基于单片机技术的智能化控制系统,可以通过无线通信手段实现对各种设备的远程控制。
本文将详细介绍单片机远程控制系统的设计原理、系统组成、通信方式、远程控制协议以及应用领域等内容,旨在帮助读者更好地理解和应用该技术。
二、设计原理单片机远程控制系统的设计原理是基于单片机通过接收器和发射器与外部设备进行无线通信,通过控制信号的发送和接收以实现对设备的远程控制。
整个系统由控制端和被控制端组成,控制端负责发出控制信号,被控制端负责接收控制信号并执行相应操作。
三、系统组成1. 单片机:作为控制端和被控制端的核心控制器,负责接收、处理和发送控制信号。
2. 无线模块:提供无线通信功能,如蓝牙模块、Wi-Fi模块等。
3. 传感器:用于获取环境信息和设备状态,如温度传感器、光敏传感器等。
4. 执行器:负责执行被控制设备的操作,如电机、继电器等。
四、通信方式单片机远程控制系统可以采用多种通信方式,如蓝牙通信、Wi-Fi通信、红外通信等,具体选择通信方式需要根据实际需求和系统成本进行权衡。
1. 蓝牙通信:蓝牙通信是一种短距离无线通信方式,具有低功耗、易于使用的特点。
可以通过手机、平板电脑等设备与单片机进行蓝牙通信,实现对设备的远程控制。
2. Wi-Fi通信:Wi-Fi通信是一种较为常用的无线通信方式,具有较高的传输速度和较长的通信距离。
可以通过路由器或者Wi-Fi模块连接到互联网,实现对设备的远程控制。
3. 红外通信:红外通信是一种无线通信方式,常用于家电遥控、智能家居等领域。
通过红外发射器和红外接收器,可以实现对设备的远程控制。
五、远程控制协议为了保证单片机远程控制系统的稳定性和安全性,需要定义相应的远程控制协议。
远程控制协议规定了控制信号的格式、传输方式以及安全验证等内容,以确保通信的准确性和可靠性。
1. 控制信号格式:远程控制协议需要定义控制信号的格式,包括起始位、数据位、校验位等信息。
基于bu64843hc的1553b远程终端硬件设计
基于BU64843HC的1553B远程终端硬件设计Hardware Design of1553B RT Based on BU64843HC朱习松,夏斌,潘硕(中国电子科技集团第五十八研究所,江苏无锡214035)Zhu Xi-song,Xia Bin,Pan Shuo(The58th Research Institute of China Electronics TechnologyGroup Corporation,Jiangsu Wuxi214035)摘要:MIL-STD-1553B,一种应用广泛的军用数据总线。
其数据总线具有双向输出特性,实时性和可靠性高,应用范围已从军用飞机扩展到坦克、船舶、卫星、导弹等武器装备领域。
BU64843HC,一款3.3V电压供电内置隔离变压器的小型化1553B控制器协议芯片。
该文介绍了1553B总线技术特点和协议解析特点,简要介绍了BU64843HC电路的功能特点和工作原理,并提出了一种基于BU64843HC电路的1553B远程终端总线控制器硬件设计方案。
关键词:MIL-STD-1553B;BU64843HC;FPGA;远程终端中图分类号:V243;TP336文献标识码:A文章编号:1003-0107(2019)11-0021-06Abstract:MIL-STD-1553B,a widely applied military data bus.The data bus with bidirectional output characte-ristics has good practicality and reliability.The application of MIL-STD-1553B technology has been expandedfrom military aircraft to tanks,ships,satellites,missiles and other weapons and equipment field.BU64843HC,asmall1553B controller protocol chip including the isolation transformers by3.3V power supplied.This paperintroduce the1553B bus and the functional characteristics of BU64843HC in detail,and then put forward aproject of the1553B bus controller Remote Terminal hardware designing based on BU64843HC.Key words:MIL-STD-1553B;BU64843HC;FPGA;Remote TerminalCLC number:V243;TP336Document code:A Article ID:1003-0107(2019)11-0021-060引言在20世纪60年代在1553总线出现之前,飞机机载电子系统没有统一标准的通用数据通道,飞机内部的数据总线形式多种多样,各个电子设备单元之间往往需要大量的电缆进行连接[1]。
基于状态机的移动应用越权访问漏洞检测方法
基于状态机的移动应用越权访问漏洞检测方法姜海涛;郭雅娟;陈昊;郭静;周超;徐建【摘要】In order to solve the problem of unauthorized access vulnerability in mobile applications due to the lack of permission verification in the background,this paper proposes a method of mobile applications unauthorized access vulnerability detection based on finite state machines.By constructing the finite state machines of different users,the complete state machine of mobile application is synthesized.Each request in the complete state machine is dynamically reconstructed and the execution result is analyzed to realize the efficient and complete test of the unauthorized access vulnerabilities.Internal mobile applications are selected to do experiments.The experimental results show that the proposed method finds all hidden unauthorized access vulnerabilities.Unauthorized access vulnerabilities can be accurately detected through the proposed unauthorized access vulnerability detection method.%为了解决移动应用平台缺乏权限验证所导致的越权访问问题,研究了一种基于状态机的移动应用越权访问漏洞检测方法.该文为不同角色的用户分别建立各自的有限状态机,并合成出移动应用的完整状态机.在此基础上,通过对完整状态机中的每个请求进行动态重构和执行结果分析实现越权访问漏洞的高效完备测试.选择企业内部移动应用进行实验,结果表明该方法能发现了隐藏的越权访问漏洞.检测方法能被用于准确地识别出越权访问漏洞.【期刊名称】《南京理工大学学报(自然科学版)》【年(卷),期】2017(041)004【总页数】8页(P434-441)【关键词】移动应用;状态机;越权访问;漏洞检测;动态重构【作者】姜海涛;郭雅娟;陈昊;郭静;周超;徐建【作者单位】国网江苏省电力公司电力科学研究院,江苏南京 211103;国网江苏省电力公司电力科学研究院,江苏南京 211103;国网江苏省电力公司电力科学研究院,江苏南京 211103;国网江苏省电力公司电力科学研究院,江苏南京 211103;国网江苏省电力公司电力科学研究院,江苏南京 211103;南京理工大学计算机科学与工程学院,江苏南京 210094【正文语种】中文【中图分类】TP309.2随着移动应用的飞速发展,移动应用的漏洞数量也呈现井喷趋势增长。
计算机远程控制技术原理与实现方法

计算机远程控制技术原理与实现方法随着计算机技术的不断发展,远程控制技术逐渐成为了大家生活和工作中不可或缺的一部分。
无论是个人用户还是企业用户,远程控制技术都可以为其带来极大的便利和效益。
远程控制技术是指用户可以远程控制他人计算机或设备的技术。
本文将围绕计算机远程控制技术的原理和实现方法展开探讨。
计算机远程控制技术的原理主要包括两个核心部分:远程控制协议和远程控制软件。
1. 远程控制协议远程控制协议是计算机远程控制的基础,它规定了远程控制过程中数据的传输格式、通信协议等关键信息。
常见的远程控制协议有VNC(Virtual Network Computing)、RDP (Remote Desktop Protocol)和TeamViewer等。
VNC是一种基于TCP/IP协议的远程控制协议,它允许用户通过网络远程控制另一台计算机,并在远程计算机上执行相应操作。
RDP是一种由微软公司开发的远程桌面协议,通过RDP协议,用户可以将本地计算机的桌面显示在远程计算机上,并对其进行操作。
TeamViewer则是一种广泛应用的远程控制协议,它可以实现跨平台、跨设备的远程控制。
远程控制软件是实现远程控制协议的具体工具,它通过将用户输入的操作指令封装成远程控制协议规定的数据格式,并通过网络传输到远程计算机。
远程控制软件还能够解析远程计算机发送过来的数据,并将其还原成本地计算机能够理解的操作指令。
常见的远程控制软件包括VNC Viewer、Microsoft Remote Desktop和TeamViewer等。
这些软件为用户提供了直观、便捷的远程控制操作界面,并且支持多种远程控制协议,能够满足用户在不同场景下的远程控制需求。
计算机远程控制技术的实现方法主要涉及远程控制软件的安装和配置,以及网络环境的设置。
下面将分别对这两个方面进行具体介绍。
1. 远程控制软件的安装和配置在安装完成后,用户需要对远程控制软件进行相应的配置,以确保远程控制功能能够正常使用。
基于GD32F407的电源模块BMC设计
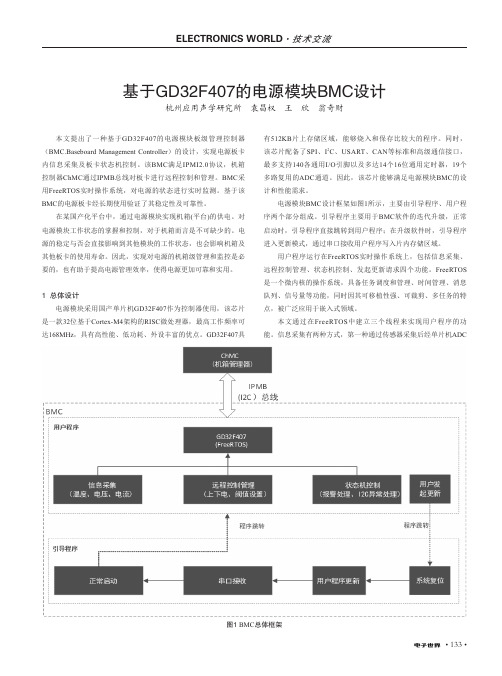
• 133•本文提出了一种基于GD32F407的电源模块板级管理控制器(BMC.Baseboard Management Controller)的设计,实现电源板卡内信息采集及板卡状态机控制。
该BMC满足IPMI2.0协议,机箱控制器ChMC通过IPMB总线对板卡进行远程控制和管理。
BMC采用FreeRTOS实时操作系统,对电源的状态进行实时监测。
基于该BMC的电源板卡经长期使用验证了其稳定性及可靠性。
在某国产化平台中,通过电源模块实现机箱(平台)的供电。
对电源模块工作状态的掌握和控制,对于机箱而言是不可缺少的。
电源的稳定与否会直接影响到其他模块的工作状态,也会影响机箱及其他板卡的使用寿命。
因此,实现对电源的机箱级管理和监控是必要的,也有助于提高电源管理效率,使得电源更加可靠和实用。
1 总体设计电源模块采用国产单片机GD32F407作为控制器使用,该芯片是一款32位基于Cortex-M4架构的RISC微处理器,最高工作频率可达168MHz,具有高性能、低功耗、外设丰富的优点。
GD32F407具有512KB片上存储区域,能够烧入和保存比较大的程序。
同时,该芯片配备了SPI、I2C、USART、CAN等标准和高级通信接口,最多支持140各通用I/O引脚以及多达14个16位通用定时器,19个多路复用的ADC通道。
因此,该芯片能够满足电源模块BMC的设计和性能需求。
电源模块BMC设计框架如图1所示,主要由引导程序、用户程序两个部分组成。
引导程序主要用于BMC软件的迭代升级,正常启动时,引导程序直接跳转到用户程序;在升级软件时,引导程序进入更新模式,通过串口接收用户程序写入片内存储区域。
用户程序运行在FreeRTOS实时操作系统上,包括信息采集、远程控制管理、状态机控制、发起更新请求四个功能。
FreeRTOS 是一个微内核的操作系统,具备任务调度和管理、时间管理、消息队列、信号量等功能,同时因其可移植性强、可裁剪、多任务的特点,被广泛应用于嵌入式领域。
基于STM32的智能家居检测控制系统设计

基于STM32的智能家居检测控制系统设计【摘要】智能家居技术是当前智能化发展的一个重要方向,其中基于STM32的智能家居检测控制系统设计成为了研究的热点。
本文首先介绍了研究的背景、目的和意义,然后详细探讨了智能家居系统的概述和STM32在其中的应用。
接着对硬件设计和软件设计进行了深入分析,讨论了系统测试与优化的方法。
最后结合实际案例进行了设计成果总结,展望未来发展,并得出结论。
通过本文的研究,将有助于更好地推进智能家居技术的发展,提高家居生活的智能化水平,为人们的生活带来更多便利和舒适。
【关键词】智能家居系统、STM32、硬件设计、软件设计、系统测试、优化、设计成果、未来展望、结论、研究背景、研究目的、意义。
1. 引言1.1 研究背景智能家居技术的发展已经成为当前智能化生活的重要组成部分。
随着物联网技术的不断发展与普及,智能家居系统已经逐渐走进人们的生活,为人们提供了更加便捷、智能的家居体验。
随着人们对生活品质的要求不断提高,智能家居系统将成为未来家居发展的主流趋势。
在智能家居系统中,传感器和控制器是至关重要的组成部分。
传感器可以实时监测环境信息,如温度、湿度、光照等,而控制器则可以根据传感器获取的信息进行智能化控制,实现自动化的家居管理。
本研究致力于基于STM32开发一种智能家居检测控制系统,通过硬件设计、软件设计和系统测试,来实现智能家居系统的自动化控制。
通过该系统,可以实现智能家居设备的远程控制和监测,提高生活的便利性和舒适度,同时也为未来智能家居技术的发展提供参考。
1.2 研究目的研究目的是为了解决传统家居系统存在的不智能、不便捷、不安全等问题,通过利用STM32芯片作为核心控制单元,设计一套智能家居检测控制系统,实现家居设备的智能化控制和监测。
具体来说,我们的研究目的包括以下几个方面:1. 提升家居系统的智能化水平:利用STM32芯片的高性能和低功耗特点,设计出高效、智能的家居系统,实现自动化控制和智能化调节。
远程遥控系统的设计与实现

远程遥控系统的设计与实现Chapter 1:概述远程遥控系统(Remote Control System)是一种通过无线通信技术实现对目标设备进行遥控操作的系统。
本章将介绍远程遥控系统的背景和意义,以及本文的研究目标和方法。
Chapter 2:系统需求与分析在设计远程遥控系统之前,首先需要明确系统的需求和目标。
本章将分析用户需求,确定系统功能和性能指标,并对系统的可行性进行评估。
同时,还将分析远程遥控系统的现有技术和应用,为后续章节的设计与实现提供参考。
Chapter 3:系统架构设计系统架构设计是远程遥控系统设计过程中的关键环节。
本章将介绍系统的整体架构设计,包括主控制器、通信模块、遥控设备和被控制设备等组成部分的功能和相互关系。
同时,还将讨论各个组件的选择和配置,以及系统的安全性和可靠性保障。
Chapter 4:通信协议设计远程遥控系统的通信协议设计是保证系统正常运行的关键因素。
本章将介绍通信协议的设计原则和方法,以及常用的无线通信技术,如蓝牙、Wi-Fi和红外线等。
基于系统需求和现有技术的分析,将选择适合远程遥控系统的通信协议,并进行详细地设计和实现。
Chapter 5:遥控设备设计与实现远程遥控系统的遥控设备是实现用户对目标设备进行遥控操作的关键组成部分。
本章将介绍遥控设备的设计原则和要求,以及常见的遥控设备的实现方法。
同时,还将对遥控设备的性能指标进行评估和测试,并根据结果对遥控设备进行优化和改进。
Chapter 6:被控制设备接口设计与实现被控制设备的接口设计是远程遥控系统实现与目标设备的通讯的关键环节。
本章将分析被控制设备的各种接口类型和特性,选择合适的接口方案,并进行接口电路的设计和实现。
同时,还将对接口电路进行测试和优化,确保与遥控设备的正常通信和远程控制。
Chapter 7:系统功能测试与优化为了验证远程遥控系统的功能和性能是否达到系统需求和用户期望,需要进行系统功能测试和性能测试。
基于GPRS技术的远程电力在线监测系统
通讯中心软件系统结构框图如图 5 所示。通讯 中心起到连接终端设备和后台系统的作用,进行数 据交换。通讯中心具有一个可以动态解析的域名, 终端和后台系统通过这个域名连接到通讯中心。连 接完毕后可根据设定的规则进行各 *I%J:$ 之间的 数据交换。
由于采用移动公司 !"# 专用网,因此,隔离 了外部网络用户的非法侵入,系统和数据的安全性 得到 了保 证。 数据 传输 采用 $%" & ’" 协 议,由 于 $%" 协议是面向连接的传输控制层协议,其内部规 定了严格的校验、纠错等控制机制,因此数据传输 的可靠性高。 ", (! $%&’ 通讯终端硬件结构 (")* 终端硬件结构框图见图 + 。
=20> 是欧洲电信协会 =>? 系统中有关分组数 据所规定的标准。 =20> 采用信道捆绑和增强数据 速率改进实现高速接入,目前 =20> 的设计可以在 一个载频或 @ 个信道中实现捆绑,将每个信道的传 输速率提高到 ’#8 #ABCD,因此 =20> 方式最大速率 是 ’’E8 $ABCD。=20> 使若干移动用户 能够同时共 享一个无线信道,一个移动用户也可以使用多个无 线信道。实际不发送或接收数据包的用户仅占很小 一部分网络资源。有了 =20>,用户的呼叫建立时 间大为缩短,几乎 可以做到“ 永远在 线” 。此外, =20> 是营运商能够以传输的数据量而不是连接时 间为 基 准 来计 费,从 而令 每 个 用户 的 服 务成 本 更低。
图 " ! 软件系ቤተ መጻሕፍቲ ባይዱ结构图 图 (! $%&’ 终端结构框图
(")* 终端通讯流程如图 9 所示。在通讯中心 与 (")* 终端之间通信部分的软件设计中,重点要 保持通道畅通和数据交换安全可靠。 保持通
状态机在远程抄表终端的应用
模块与控 制器 间的通信协议使用标 准 的 A T命 令 集 引。
MC 5通 过 串行 口与 M U进 行 通讯 , 是 进 行 5 C 但
甘
肃
第2 8卷 第 8期 21 0 2年 4月
甘肃科 技
Ga s c e c n c n lg n u S in e a d Te h o o y
以2 No 8 8 . A r 2 1 p. 02
状态 机 在 远 程 抄 表 终端 的应 用
贾玉静
( 山东政法学院 信息科学技术系 , 山东 济南 20 1 ) 5 04 摘 要: 分析了 G R P S远程抄表终端 的功能设计 , 把应用于硬件时序电路的有限状态机 , 引入 到终端 的嵌入式 软件设
计 中, 以减轻嵌 入式软件开发人员的工作负 担 , 同时提 高软件 的可读 性 , 增强 软件 的可 维护性 和可扩充性 。以远程
终端 的状态机设计为例 , 深入研究如何在开发嵌ห้องสมุดไป่ตู้人式 软件时 , 应用 有限状 态机处理嵌 入式系统 中并发 的多个任务 。 关键词 : 程抄表 ; 远 有限状态机 ; 嵌入式软件 ; 时间片轮转 调度 中图分类号 :3 8 1 P 6.
作 等多个 任务 。 有 限状 态 机 一般 应 用 于硬 件 时序 电路设 计 , 是 根据 当前 状态 以及 触发条 件进行 状态 转换 的一 种机
GR P S远程抄表终端采集智能电表的数据 , 并 发送到 监控 中心 , 整 个无 线 抄 表 系统 中承 上启 下 是
的关 键 部 分 。远 程 抄 表终 端 通 过 R 45接 口直 S8 接连接 到 电表 上 , 以同时 连接多 个 电表 , 现对 电 可 实
有效 的触发 事 件 发 生 时 , 进入 下 一 状 态 ( 然也 便 当
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于状态机的远程控制技术
0引言
远程通讯系统一般要求通信距离在30公里以上,所以通常情况下通信环境比较复杂,在较长距离下的电磁干扰和信号衰弱对通讯系统的稳定性都提出了较高的要求。
串口是常用的计算机与外部设备之间的数据传输通道[1],由于使用其通信方便易行,且能实现数据的远距离传输,故可采用串口通信作为远程通信的渠道。
同时要利用合理的通信帧定义模式进而实现远程通信协议的同步性问题,目前较为常用的方法有逐次比较法[2]、基于FIFO队列同步法[3]、状态机消息同步法[4]。
实验表明状态机消息同步法最大限度地减少了系统的冗余运算和中断后数据丢失的问题,保证了控制站第一时间获得被控设备是否接受指令开始运行的信息,实现了控制的可视性,进而保证了系统的稳定运行。
1通讯设备配置
系统采用串口通讯的方式实现PC机与外部设备的连接,利用VC++编写的控制软件和指令接收软件实现系统指令的发送和执行。
外部设备采用PDL35数传电台,这种电台能够实现最大19200比特每秒的传输速度,并且具有低功耗和前向纠错的能力,提高了
抗干扰性和覆盖性。
控制设备通过电台向工作设备发送标准化指令,双方基于特定频率的无线电互相访问。
连接成功后进入设置主界面后可查看电台类型、频率范围、固定版号等信息。
主要在”RadioLink”选项卡下设置通讯频率、波特率与通信灵敏度。
特别需要注意的是通信频率和通信灵敏度需要基站和移动站完全一致。
2通讯帧格式定义
对于远程通讯系统,需要完成多个不同的工作,并且实时返回工作状态以保证远程控制的可靠性。
这就需要对通信协议进行特殊的定义以进行解析同步,进而完成各项工作。
本系统中定义通信协议帧结构如图2所示。
帧头用于同步[5],一般为一个或两个ASCII字符,本系统中使用一个字节0xFF表示,系统接收此字符后开始接收中断。
帧发送方用1字节表示,分别用0x01表示1号基站发送的命令,同时也意味着任何接收设备会向此基站反馈设备是否正常运行。
帧接收方表示方法与发送方相同,0x01表示命令是发送给1号设备的,其他设备在接受此命令时不工作。
帧类型定义了系统命令表征的不同功能,帧内容主要包含了指导接收设备如何执行功能的具体信息,而帧内容长度则作为帧内容的校验信息指导接收设备提取接收信息。
在本系统采用一个字节的0xFE作为结束码,当系统检测到此数据段的时候跳出系统中断。
表1为通信协议中帧内容的详细格式。
3串口通信数据解析及处理
3.1逐次比较法
这是一种比较基本的方法,首先等待串口数据,在串口接收中断服务程序中每收到一个数据就与已知的命令数据串进行比较[6],如果不一致则等待新数据直到接收的数据与包头信息的第1个数据相同。
第1个字节的数据比较正确后将收到的第2个字节与已知数据串信息的第2个字节进行比较,如果不正确则退出此中断。
程序流程如图3所示。
此种方法代码量小、编程简单,可用于在主程序中数据量较小并且格式相对固定的程序。
但是这种方法浪费了大量的中断进程,并且在每个中断过程中执行命令操作需要消耗较多的机器周期,无法满足串口数据量较大且传输较快的情况。
3.2基于数组的FIFO队列法
也有人提出对上述方法的改进,首先定义一个固定长度的全局数组,并将数组看做是一个先入先出的FIFO队列[8]。
在串口接收中断中,每接收一个数据就保存在此数组中,将得到的数据与已知的命令格式串进行比较,如果正确则将数组中的所有数据向前移动一个字节,串口接收到的新字节存入数组末字节中,将整个数组与协议
中的包头信息比较如果正确则置位已同步标志位然后开始接收存储有用数据[8],否则继续等待同步。
其流程图如图4所示。
此种方法与逐次比较的帧同步方法相比能够比较快速正确地检测出同步包头,但是对数据格式要求相对固定,特别是帧内容形式比较复杂的时候难以对数组的长度进行限制,在提取相关的信息的时候会浪费大量的时间。
3.3基于字符串的状态机消息相应机制
鉴于以上两种方法的缺点,在本系统中采用基于字符串的状态消息响应机制,首先将命令转化为字符串的格式,以十六机制代码发送给电台进行传输。
在接收方,首先检测同步字符,当检测到同步字符时,响应状态机消息机制,同时将此字符串依次存入缓存中。
由于传输距离比较远,一般存在字符串命令不能在一个机器周期内到达的情况,则指定系统一直处于写缓存状态中。
当第一个机器周期没有检测到结束码,则将缓存内容写给一个过渡变量,同时清空缓存以完成下一步写缓存操作。
依次进行以上操作,在每一次机器周期结束后将缓存中的数据累加到过渡变量中,直到系统检测到接收数据的最后一个字节变量为结束码,此时将缓存中的变量赋值给消息效应命令,开始状态机响应环节。
状态机状态转移图如图5所示。
当
数据完成初始检测校验,即检测到结束码0xFE之后,系统开
始状态消息响应循环,否则超过一定时间没有结束校验,则默认此次命令消息发送失败,系统缓存清空,跳出串口中断。
在消息响应循环中,系统会根据预先设定的字符串格式和所检测到的字符串标志位信息,对接收到的有效数据进行提取,并赋值给相应的变量做下一步的操作。
指令操作结束后,工作设备将自动返回“命令接受正确”指令,向基站确认此次操作成功。
否则任何一步出现错误,系统将自动跳出中断,并返回“命令格式错误”指令,提示基站重新发送命令。
工作设备示例程序段如下:BYTEdata[1024];CStringstr;if(m_MSComm1.GetCommEvent()==2){m_input1=m_MSComm1.GetInput(;m_input2=m_input1;length=m_input2.GetOneDimSize();for(i=0;i<length;i++){m_input2.GetElement(&i,data+i);}m_receivedata.Empty();for(i=0;i<length;i++){chara=*(char*)(data+i);str.Format("%c",a);m_receivedata+=str;//串口消息获得}guodu+=m_receivedata;guodujieshu=m_receivedata.Mid(length-2,2);if(guodujieshu=="FE"){receivefasongfang=m_receivedata.Mid(2,1);receivejieshu=g
uodu.Mid(guodu.GetLength()-2,2);}}////////////////////数据接收本系统的设计思路由于采用了基于字符串的状态机消息响应机制,快速有效地实现了串口通信的同步,而且程序结构清晰、便于维护、也方便日后通讯系统功能升级。
并且串口中断服务子程序中将有效数据提取为不同的字符串变量,方便操作的同时也减少了完成消息响应循环所需要的周期。