第九届蓝桥杯EV3省赛试题
第九届蓝桥杯国赛c++B组第二题
第九届蓝桥杯国赛c++B组第⼆题今天早起没事⼲,因为⾃⼰省赛的时候的垃圾状态没能打⼊决赛很不⽢⼼,就随便点开了⼀道国赛真题看了看,发现确实不难。
2.激光样式问题描述x星球的盛⼤节⽇为增加⽓氛,⽤30台机光器⼀字排开,向太空中打出光柱。
安装调试的时候才发现,不知什么原因,相邻的两台激光器不能同时打开!国王很想知道,在⽬前这种bug存在的情况下,⼀共能打出多少种激光效果?显然,如果只有3台机器,⼀共可以成5种样式,即:全都关上(sorry, 此时⽆声胜有声,这也算⼀种)开⼀台,共3种开两台,只1种30台就不好算了,国王只好请你帮忙了。
要求提交⼀个整数,表⽰30台激光器能形成的样式种数。
注意,只提交⼀个整数,不要填写任何多余的内容。
答案:2178309⽅法⼀:思路:⽤dfs来做。
1.每⼀个灯都有两条路可⾛,打开或者不打开。
2.当⼀个灯不打开的时候直接往下⾛就可以了。
3.当⼀个灯打开的时候,前提是:它前⾯的灯不打开。
(因为我们每次计算都是看的前⾯的灯,所以就保证了所有相邻的灯不同时打开,每个灯都会和它前⾯的灯⽐较。
)弄好思路之后就可以写代码啦~⼀道dfs模板题~#include<bits/stdc++.h>using namespace std;const int N = 40;int st[N];long long ans;void dfs(int x){if(x > 30){ans ++;return ;}dfs(x + 1); //x不打开if(!st[x - 1]){st[x] = 1; //x打开dfs(x + 1);st[x] = 0;}}int main(){dfs(1);printf("%d",ans);return 0;}⽅法⼆:通过观察发现⼀个灯2,两个灯3,三个灯5,符合斐波那契数列规律。
因此⽤斐波那契数列来做。
#include<bits/stdc++.h>using namespace std;const int N = 40;int st[N];long long f[3];int main(){f[1] = 2;f[2] = 3;for(int i = 2 ; i < 30 ; i ++){f[0] = f[1];f[1] = f[2];f[2] = f[0] + f[1];}cout << f[2];return 0;}。
最新EV3蓝桥杯模拟练习试卷(中级组)
STEMA 考试编程题EV3 模拟练习试卷(中级组)编程第一题【编程实现】已知三个点的坐标位置分别为(40,40)、(40,100)、(100,100),每两个点间画出一条线段,最后组成三角形。
1)程序开启后,屏幕显示空白;2)按下中间按钮后显示任意一条线段;3)继续按下中间按钮后显示第二条线段;4)再次按下中间按钮后显示第三条线段,三条线段组成符合题目要求的三角形并保持两秒程序结束。
【硬件准备】将一个大马达连接到EV3 主机的A 口,将一个颜色传感器连接到主机的3 口。
【编程实现】1)程序开启后,颜色传感器反射光线强度的数值实时显示在屏幕上;2)马达以颜色传感器反射光线强度的数值作为马达功率转动;3)如果颜色传感器反射光线强度的数值大于10,程序块状态灯显示绿色;4)如果颜色传感器反射光线强度的数值不大于10,程序块状态灯显示红色;5)直到按下中间按钮程序结束。
【编程实现】1)程序开启后,在主机屏幕上显示一个三位的随机数;2)如果这个三位数是3 的倍数,则同时在它的下方显示一个数字3;3)如果这个三位数是5 的倍数,则同时在它的下方显示一个数字5;4)每按一次中间按钮后,则重新显示一个新的三位的随机数,如果它是3 或者5 的倍数,则在其下方显示对应的数字;5)当累计出现3 次3 的倍数的数字或者3 次5 的倍数的数字之后,程序保持2 秒结束。
【编程实现】1)程序开启后,在主机屏幕(40,60)位置显示一个宽度为102,高度为20 的不填充矩形,并在其左上方显示0%,如图:2)当按下右边按钮后,以0.1 秒一条线的速度填充矩形,填充不能超出给定的矩形,当松开右边按钮后,则停止填充,如图为填充72 条线段的呈现;3)当按下左边按钮后,以0.1 秒一条线的速度去掉填充的线段(填充白色即可),取消填充不能超出给定的矩形,当松开左边按钮后,则停止填充白色,下图为在72%填充的基础上,取消填充36 条线段的呈现;4)左上方%前面的数值即为填充的线条数,随着填充变化而变化,范围为0~100;5)可以反复执行填充和取消填充。
蓝桥杯第九届cc组试题及答案

蓝桥杯第九届cc组试题及答案蓝桥杯第九届CC组试题及答案一、选择题(每题5分,共20分)1. 在C语言中,以下哪个关键字用于定义一个结构体?A. structB. unionC. enumD. typedef答案:A2. 下列哪个选项是正确的C语言函数声明?A. int function(int x);B. int function(int);C. int function(int x, int y);D. int function(x, int y);答案:A3. 在C语言中,以下哪个选项是合法的字符串字面量?A. "Hello, World!"B. 'Hello, World!'C. "Hello, World!" "Another string"D. "Hello, World!" Another string答案:A4. 在C语言中,以下哪个选项是合法的数组声明?A. int arr[5] = {1, 2, 3, 4, 5};B. int arr[] = {1, 2, 3, 4, 5};C. int arr[5] = {1, 2};D. int arr[] = {1, 2, 3, 4};答案:A二、填空题(每题5分,共20分)1. 在C语言中,使用________关键字可以定义一个指针变量。
答案:int*2. C语言中,________运算符用于计算两个整数的和。
答案:+3. 在C语言中,________函数用于将字符串复制到另一个字符串。
答案:strcpy4. C语言中,________关键字用于定义一个静态局部变量。
答案:static三、编程题(每题10分,共20分)1. 编写一个C语言函数,计算并返回两个整数的和。
答案:```cint add(int a, int b) {return a + b;}```2. 编写一个C语言程序,读取一个字符串,并打印出它的逆序。
最新EV3蓝桥杯模拟练习试卷2(初级组)
STEMA EV3 程序设计组的考试包括 4-6 道编程题目。
【硬件准备】将一个颜色传感器连接到主机的3 口。
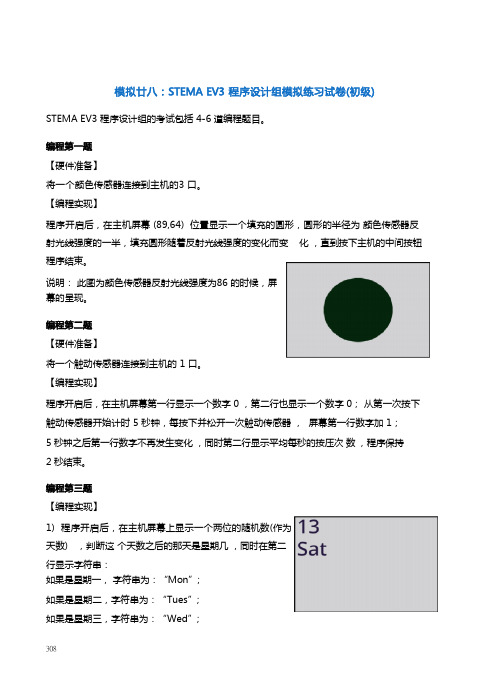
【编程实现】程序开启后,在主机屏幕 (89,64) 位置显示一个填充的圆形,圆形的半径为颜色传感器反射光线强度的一半,填充圆形随着反射光线强度的变化而变化,直到按下主机的中间按钮程序结束。
说明:此图为颜色传感器反射光线强度为86 的时候,屏幕的呈现。
【硬件准备】将一个触动传感器连接到主机的 1 口。
【编程实现】程序开启后,在主机屏幕第一行显示一个数字 0 ,第二行也显示一个数字 0;从第一次按下触动传感器开始计时 5 秒钟,每按下并松开一次触动传感器,屏幕第一行数字加 1;5 秒钟之后第一行数字不再发生变化,同时第二行显示平均每秒的按压次数,程序保持2 秒结束。
【编程实现】1) 程序开启后,在主机屏幕上显示一个两位的随机数(作为天数) ,判断这个天数之后的那天是星期几,同时在第二行显示字符串:如果是星期一,字符串为:“Mon”;如果是星期二,字符串为:“Tues”;如果是星期三,字符串为:“Wed”;如果是星期四,字符串为:“Thur”;如果是星期五,字符串为:“Fri”;如果是星期六,字符串为:“Sat”;如果是星期日,字符串为:“Sun”;说明:此图为随机数的 13 的时候,屏幕的呈现。
2) 程序持续运行,每按一下中间按钮,刷新屏幕重新显示随机数和下面的字符串。
【编程实现】1) 程序开启后,在主机屏幕 (0,0) 位置依次显示三个 10 到 80 范围内的随机数,随机数之间以空格隔开,如右图;2) 按下一次主机的中间按钮后,以(20,20)作为坐标起点显示三个不填充正方形,正方形的边长对应三个随机数,如右图;3) 再按一次主机的中间按钮,在(0,100) 位置显示一个乘法算式,‘最大的随机数’*‘最小的随机数’=乘积,如右图;4)最后按一次主机的中间按钮,程序结束。
蓝桥杯ev3等级考试级别与大纲
蓝桥杯ev3等级考试级别与大纲
蓝桥杯EV3等级考试级别分为基础级、提高级和竞赛级。
考试大纲包括
EV3基础知识、编程语言和算法与数据结构等方面。
具体来说,考试涉及
EV3基础知识,如马达、传感器、屏幕显示、声音、状态灯、按键的使用等;编程语言,如Python、C++等;算法与数据结构,如排序、查找、递归、动态规划等。
此外,考试还涉及数学基础知识,如代数、几何、概率统计等;逻辑思维,如推理、归纳、演绎等;创新与设计思维,如创意设计、模块化设计、系统化设计等。
总体来说,蓝桥杯EV3等级考试级别与大纲注重考查学生的基础知识和综
合能力,同时也鼓励学生在考试中发挥创新思维和解决问题的能力。
2020年5月蓝桥杯省赛训练题3编程题 - 副本
2020蓝桥杯省赛训练题编程题第一题硬件准备:将一个大马达连接到EV3 主机的 A 口。
编程实现:在程序开始的3秒钟内,随意A口转动马达,并在EV3主机屏幕左上角实时显示马达所转动的角度,在3秒钟后,播放提示音符“C4”1秒钟,等待1秒钟后,A口马达反向转动到程序起始时的原始位置,程序结束。
(提示:制动)程序保存在“0523”项目中,命名为“001”。
第二题硬件准备:两个大型电机。
编程实现:程序持续运行,模拟EV3主机的“Motor Control”功能,即用EV3主机的上下左右按钮实现对A口马达及D口马达的正向和反向转动控制,用中间按钮用于控制“A、D”马达与控制“B、C”马达的切换功能。
程序保存在“0523”项目中,命名为“002”。
第三题编程实现:在EV3主机屏幕上显示数字0~100以内的偶数(包含0和100),同时显示这个数字之前所有数字的和(显示位置任选),每次显示1个数字,间隔0.5秒钟。
例如:屏幕上显示数字“6”时应同时显示数字0、2、4、6的和:“12”。
程序保存在“0523”项目中,命名为“003”。
第四题硬件准备:把颜色传感器连接到3端口。
编程实现:在屏幕第一行实时显示颜色传感器的反射光强度数值,并在第三行显示到目前为止,颜色传感器所测量的反射光强度的最大值,以及到目前为止,颜色传感器所测量的反射光强度的最小值,显示内容的格式为:“MAX:99,MIN:0”。
程序保存在“0523”项目中,命名为“04”。
第五题编程实现:画出下图,3秒后结束程序保存在“0523”项目中,命名为“05”。
第六题编程实现:在EV3主机屏幕上画出一个填充的等腰三角形,5秒后清除屏幕,接着画出一个填充的直角三角形,5秒后程序结束。
显示效果如下图,三角形的大小没有规定,但能清晰看出是什么三角形。
程序保存在“0523”项目中,命名为“06”。
第七题在算数游戏中在算术游戏中,EV3将随机生成10以内加减法的算式。
2018 年第九届蓝桥杯少儿试题解析
2018 年第九届蓝桥杯少儿试题解析一、背景介绍蓝桥杯竞赛是国内外知名的计算机竞赛之一,旨在培养和选拔优秀的计算机人才。
其中,少儿组比赛是专门为中小学生设立的,旨在通过竞赛活动提高他们的计算机技能和编程能力。
2018年,第九届蓝桥杯少儿比赛如期举行,本篇文章将针对本次比赛的试题进行解析。
二、试题解析本次蓝桥杯少儿比赛的试题类型为编程题,要求参赛者使用一种编程语言(如Python、Java等)编写程序,解决题目中所描述的问题。
下面我们将针对每个题目进行详细解析:1. 题目一:猜数字游戏要求参赛者编写一个猜数字游戏,根据参赛者的猜测范围自动调整数字,直到猜中为止。
解析:此题主要考察参赛者的逻辑思维能力,需要参赛者掌握基本的编程语法和循环结构。
解题思路:首先确定游戏规则,设定猜测次数上限,使用循环结构根据猜测范围自动调整数字,直到猜中为止。
注意要处理用户输入的有效性,避免程序崩溃。
2. 题目二:数列求和给定一组正整数数列,求该数列的和。
解析:此题主要考察参赛者的数学计算能力,需要参赛者掌握基本的数学运算和编程语法。
解题思路:根据数列的特点,使用循环结构和累加器求和。
注意要处理数列中可能存在的重复数字和负数等情况。
3. 题目三:找规律填图给定一组图形,要求参赛者找出其中的规律,并填出缺失的图形。
解析:此题主要考察参赛者的观察力和逻辑思维能力,需要参赛者具备一定的图像识别和编程能力。
解题思路:仔细观察每个图形的特点,找出其中的规律。
注意要按照题目要求填写缺失的图形,避免出现错误。
三、解题技巧1. 熟悉基本的编程语法和结构,如循环、条件语句、函数等。
2. 认真阅读题目要求,理清解题思路,避免遗漏题目中的细节。
3. 遇到问题时,要冷静分析,尝试多种方法解决问题,选择最优方案。
4. 善于利用调试工具和错误提示信息,找出程序中的错误并进行修正。
5. 对于图形类题目,要仔细观察图形特点,找出其中的规律。
四、总结通过以上解析和技巧,我们可以看出蓝桥杯少儿比赛的试题涵盖了编程、数学、观察力等多个方面。
2020年5月蓝桥杯省赛训练题1编程题

编程实现:
在EV3主机屏幕上,以坐标(5,5)处为圆心画出半径为5的实心小球,并以“每0.05秒钟移动一次,每次移动时小球位置的X坐标+3,Y坐标+4”的初始方式开始在屏幕中运动;当小球运动到屏幕的上、下、左和右边缘时,小球被反弹,并在反弹的同时播放“Click”声音(播放声音不影响小球顺畅地运动)。运动方向反弹示例如下,示意图1为碰到下边缘的反弹;示意图2为碰到右边缘的反弹。
第二题
硬件准备:
将一个触碰传感器连接至EV3主机1口。
编程实现:
程序持续运行。
程序初始时,EV3主机屏幕上没有任何显示;
按动触碰传感器后,EV3主机屏幕上显示“表情-&碰传感器,EV3主机屏幕上显示“眼睛->Crazy1”图像,如本题图2-2;
再次按动触碰传感器,EV3主机屏幕上显示“信息->Accept”图像,如本题图2-3;
左键表示认为左边的数小于右边的数,按下中间键表示认为左右两边的数相等,按下右键表示认为左边的数大
于右边的数。如果游戏玩家通过按键做出的选择是正确的,则在屏幕(50,60)处以“文本-像素”模式增加显示
“Right!”,否则增加显示“Wrong!”,如示意图5-2,在等待5秒钟后程序结束。
程序保存在“2005”项目中,命名为“004”。
坐标数为10。即每次移动时:按上键纵坐标减10,按下键纵坐标加10,按左键横坐标减10,按右键横坐标加10。要求每次移动均可在屏幕上明确地观察到。
程序保存在“2005”项目中,命名为“003”。
第四题
编程实现“数字比大小”游戏:
游戏玩家判断EV3主机屏幕中显示的两个数字的大小关系,由程序判定游戏玩家的判断是否正确。
具体要求:
第九届蓝桥杯大赛少儿创意编程EV3往届真题
第五题 (难度系数 6)
编程实现: 在 EV3 主机屏幕上,以坐标(5,5)处为圆心画出半径为 5 的实心小球,并以“每 0.05 秒钟移动一次,
每次移动时小球位置的 X 坐标+3,Y 坐标+4”的初始方式开始在屏幕中运动;当小球运动到屏幕的上、下、左 和右边缘时,小球被反弹,并在反弹的同时播放“click”声音(播放声音不影响小球顺畅地运动)。
程序保存在"002"项目中,命名为“002”。
1/3
蓝桥杯大赛少儿创意编程组
第三题 (难度系数 3)
编程实现: 在 EV3 主机屏幕上画出以坐标(90,60)为 2
秒钟;之后,继续画出圆形的不填充外切正方形,要求与圆形同时显示在屏幕上且不闪烁,保持 2 秒钟;之后, 继续画出正方形的两条对角线。要求与圆形和正方形同时显示在屏幕上且不闪烁,在保持 2 秒钟后,程序结束。
编程实现: 程序启动后,持续检测颜色,直至用 EV3 主机上的退出按钮执行退出操作。颜色传感器识别到白色(例如
EV3 主机上的白色部分)时,EV3 主机屏幕的左上角显示“WHITE”字样;颜色传感器识别到红色(例如大马达 上的红色部分)时,EV3 主机屏幕的左上角显示“RED”字样;在识别到其它任何颜色或者无颜色时,EV3 主机 屏幕左上角均显示“Waiting...”字样。
示意图 1
示意图 2
程序保存在“003”项目中,命名为“003”。
示意图 3
第四题 (难度系数 3)
硬件准备: 用自带的积木零件制作如右图的结构,并将
大马达连接至 EV3 主机 A 口。 编程实现:
编程使得马达以 40 的功率转动,并在带白 色指针的齿轮转动一圈后停止(不要求非常精 确,大致一圈即可)。之后在 EV3 主机屏幕左上 角处显示白色指针顺时针转动一圈所用的时间, 显示格式举例如:“5.234”,在显示 3 秒钟后 结束程序。
最新EV3蓝桥杯模拟练习试卷(初级组)
STEMA考试编程题EV3模拟练习试卷(初级组)编程第一题【硬件准备】将两个大马达连接到EV3 主机的A 口和D 口。
【编程实现】1)程序开启后,A 马达和D 马达同时以50 功率转动五圈;之后A 马达和D 马达以100 功率、同时以100 功率转动一秒;最后A 马达和D 马达同时以50 功率转动1800 度;2)马达转动结束,程序也结束。
【硬件准备】将一个颜色传感器连接到EV3 主机的1 口,将一个大马达连接到EV3 主机的A 口。
【编程实现】1)程序开启后(此时颜色传感器不能对着红色),马达以50 功率持续转动,同时主机屏幕上显示名为“信息”-“Forward”的图像,如图2-1;2)当颜色传感器检测到红色时,马达停止转动,同时主机屏幕上显示名为“信息”-“Stop 1”的图像,如图2-2;3)以上1)和2)可重复执行,未检测到红色时马达转动,遇红色马达停止。
图2-1 图2-2【硬件准备】将一个大马达连接到EV3 主机的A 口。
【编程实现】1)程序开启后,将一个2~8 的随机数显示在屏幕(0,0)位置;2)等待一秒之后,大马达以100 功率转动这个数字的圈数;3)大马达转动的同时,屏幕(0,20)的位置实时显示大马达转动的时间数值;4)大马达转动结束之后,在屏幕(0,40)的位置显示大马达每转动一圈所需要的平均时间;4)大马达转动结束之后,三行数值同时显示,显示保持两秒之后程序结束。
下图为当随机数是4 时,马达转动结束后显示的数值。
【硬件准备】将一个触碰传感器连接到EV3 主机的1 口。
【编程实现】1)程序开启后,在主机屏幕(0,110)位置显示一个边长是10 的不填充正方形,如图4-1;2)按一下触碰传感器,在原来的图形右侧显示两个同样大小的上下排列的正方形,如图4-2;3)再按一下触碰传感器,在原来的图形右侧显示三个同样大小的上下排列的正方形,如图4-3;以此类推,每按一次触碰传感器,都在原来图形基础上在其右侧后面添加一组正方形;4)一共按下9 次触碰传感器,显示如图4-4,图形保持2 秒程序结束。
2022年最新蓝桥杯stema-EV3测评
蓝桥青少一月STEMA-Ev3测评第一题(难度系数2,18个计分点)硬件准备∶EV3主机。
编程实现∶屏幕显示。
具体要求:1)运行程序,屏幕持续显示“Welcome2)2秒后,程序结束。
第二题(难度系数2,20个计分点)硬件准备∶将一个大马达连接到EV3主机的A口。
编程实现: 大马达的转动。
具体要求1)运行程序,程序块状态灯常亮,颜色为红色2)2秒后,程序块状态灯的颜色变为绿色,同时大马达以50的功率持续转动;3)按程序块中间按键,程序结束。
硬件准备∶将一个颜色传感器连接到EV3主机的1口。
编程实现∶通过环境光强度的变化来改变屏幕中的图案。
具体要求1)运行程序,如果环境光强度大于10,屏幕持续显示名为“物体”-“Light off”的图像;2)如果环境光强度小于等于10,屏幕持续显示名为“物体”-“Light on”的图像;3)重复1)、2)过程。
硬件准备:将一个大马达连接到EV3主机的A口。
编程实现:用程序块按键控制大马达的转动时间。
具体要求:1)运行程序,在屏幕(80,60)的位置显示数字5,代表大马达的转动时间;2)按一次程序块上按键,屏幕上的数字+13)按一次程序块下按键,屏幕上的数字-14)屏幕上数字的范围【1~10】;5)按程序块中间按键,屏幕上的数字开始倒数计时(每隔1秒数字-1),同时大马达开始转动;6)屏幕上的数字为0时,大马达停止转动,2秒后程序结束。
第五题(难度系数5,35个计分点)硬件准备∶EV3主机。
编程实现:与电脑进行猜拳游戏操作指南∶玩家通过程序块左、右按键来控制Scissors(剪刀)、Rock (石头)、Paper(布)的切换,程序块中间按键进行猜拳计分规则∶每局赢的一方得1分,输的一方不得分,平局双方都不得分,先得三分者获胜。
具体要求1)运行程序,在屏幕右上角显示数字0代表玩家分数,在屏幕右下角显示数字0代表电脑分数;2)玩家按下程序块左或右按键时屏幕上会出现Rock,此时玩家可通过程序块左、右按键控制Scissors (剪刀)、Rock(石头)、Paper (布)的切换(按一次程序块右按键切换下一个,按一次程序块左按键切换上一个)3)按下程序块中间按键,电脑随机显示Scissors(剪刀)、Rock(石头)、Paper(布)中的一个;4)如果玩家获胜,屏幕中间位置出现WIN,玩家分数+1;5)如果电脑获胜,屏幕中间位置出现LOSE,电脑分数+1;6)如果平局,屏幕中间位置出现DRAW,双方分数保持不变;7)等待2秒,屏幕清屏,但屏幕上会保留双方分数8)重复2)、3)、4)、5)、6)、7)过程(直到双方中有一方分数为3时,结束此过程,执行下一步)9)1秒后屏幕上会显示PLAYER(代表玩家获胜)或COMPUTER (代表电脑获胜),2秒后程序结束。
第九届蓝桥杯单片机组省赛试题
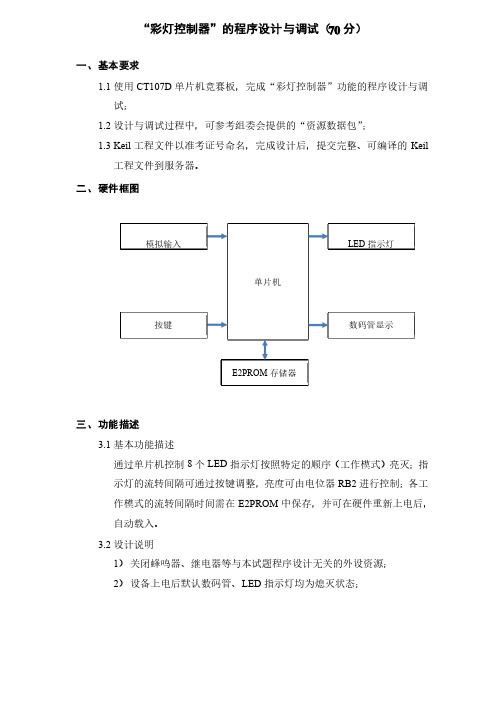
“彩灯控制器”的程序设计与调试(70分)一、 基本要求1.1 使用CT107D 单片机竞赛板,完成“彩灯控制器”功能的程序设计与调试;试;1.2 设计与调试过程中,可参考组委会提供的“资源数据包”;1.3 Keil 工程文件以准考证号命名,完成设计后,提交完整、可编译的Keil 工程文件到服务器。
工程文件到服务器。
二、 硬件框图三、 功能描述3.1 基本功能描述基本功能描述通过单片机控制8个LED 指示灯按照特定的顺序(工作模式)亮灭;指示灯的流转间隔可通过按键调整,亮度可由电位器RB2进行控制;各工作模式的流转间隔时间需在E2PROM 中保存,并可在硬件重新上电后,自动载入。
自动载入。
3.2 设计说明设计说明 1) 关闭蜂鸣器、继电器等与本试题程序设计无关的外设资源;关闭蜂鸣器、继电器等与本试题程序设计无关的外设资源; 2) 设备上电后默认数码管、LED 指示灯均为熄灭状态;指示灯均为熄灭状态; 单片机单片机LED 指示灯指示灯按键按键 模拟输入模拟输入 数码管显示数码管显示E2PROM 存储器存储器3) 流转间隔可调整范围为400ms-1200ms ;4) 设备固定按照模式1、模式2、模式3、模式4的次序循环往复运行。
的次序循环往复运行。
3.3 LED 指示灯工作模式指示灯工作模式1)模式1:按照L1、L2L2……L8的顺序,从左到右单循环点亮。
的顺序,从左到右单循环点亮。
2)模式2:按照L8、L7L7……L1的顺序,从右到左单循环点亮。
的顺序,从右到左单循环点亮。
3)模式3:L1,L8点亮L2,L7点亮L3,L6点亮L4,L5点亮状态1状态2状态3状态4模式3彩灯运行状态说明彩灯运行状态说明4)模式4:L4,L5点亮L3,L6点亮L2,L7点亮L1,L8点亮状态1状态2状态3状态4模式4彩灯运行状态说明彩灯运行状态说明3.4 亮度等级控制亮度等级控制检测电位器RB2的输出电压,控制8个LED 指示灯的亮度,要求在0V-5V 的可调区间内,实现4个均匀分布的LED 指示灯亮度等级。
第十四届蓝桥杯青少组省赛EV3试题
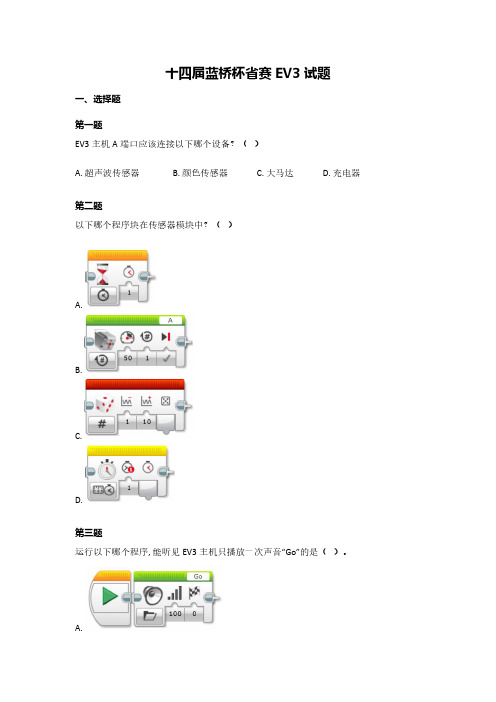
一、选择题第一题EV3主机A 端口应该连接以下哪个设备?(十四届蓝桥杯省赛EV3试题)A.超声波传感器B.颜色传感器C.大马达D.充电器第二题以下哪个程序块在传感器模块中?()A.B.C.D.第三题运行以下哪个程序,能听见EV3主机只播放一次声音“Go”的是()。
A.B.C.D.第四题二进制数101001转换成八进制数为()。
A.41B.51C.69D.29第五题运行以上程序,以下描述正确的是()。
A.变量x的值可能为-4B.EV3主机屏幕不可能显示badC.EV3主机屏幕显示good的可能性更大D.变量x的值为0时,EV3主机屏幕显示best二、编程题第一题硬件准备:将一个颜色传感器连接到EV3主机的2口。
编程实现:图像显示。
具体要求:1)运行程序,EV3主机屏幕清屏,无显示;2)每次颜色传感器检测到红色,EV3主机屏幕显示图像“表情”-“Swearing”,等待2秒,EV3主机屏幕清屏,无显示;3)重复上面的2)过程。
第二题硬件准备:将一个超声波传感器连接到EV3主机的4口,将一个大马达连接到EV3主机的A口。
编程实现:模拟自动门。
具体要求:1)运行程序,大马达为静止状态;2)当超声波传感器测量的距离小于30厘米时,大马达会以30的功率转动2圈后停止转动,等待超声波传感器测量的距离大于等于30厘米时,大马达会以-30的功率转动2圈后停止转动;3)重复上面的2)过程。
第三题硬件准备:将一个大马达连接到EV3主机的A口。
编程实现:大马达的转动。
具体要求:1)运行程序,大马达为静止状态,EV3主机状态灯开启,颜色为红色,不闪烁;2)如果按一次EV3主机上按键,大马达会以50的功率持续转动,同时EV3主机状态灯关闭;3)如果按一次EV3主机中间按键,大马达变为静止状态,同时EV3主机状态灯开启,颜色为红色,不闪烁;4)只有当大马达为静止状态时,如果按一次EV3主机下按键,大马达会以-50的功率持续转动,EV3主机状态灯开启,颜色为橙色,闪烁;注意:如果大马达为持续转动的状态时,按一次EV3主机下按键,那么大马达及EV3主机状态灯无变化,仍维持当前状态5)重复上面的2),3),4)过程。
第九届蓝桥杯校内选拔赛16级试题
第九届蓝桥杯校内选拔赛C语言组16级学生试题班级_ _ __ 姓名_ _ 学号_ _ 成绩_注意事项:●开始答题前请首先在桌面上创建一个文件夹,命名为学号+姓名,例如“1010001张三”●答题时在刚创建的文件夹下创建本题题号命名的文件夹。
例如第一题:“01”●本次考试时间为两小时三十分钟●每题20分,考核具体得分时除运算结果外,需要比较程序的结构与运行效率。
●考试结束后,请将此文件填好个人信息,保存至考试文件夹。
然后将考试文件夹整体压缩后上传到教师机。
●如有任何疑问,请询问监考教师1、求表达式的值求s=a+aa+aaa+aaaa+aa...a的值,其中a是一个数字。
例如2+22+222+2222+22222(此时共有5个数相加),几个数相加由键盘控制。
例如输入n=5,a=2则计算2+22+222+2222+22222并输出如果输入n=4,a=1则计算1+11+111+11112、求数字的位数给一个不多于5位的正整数,要求:一、求它是几位数,二、逆序打印出各位数字。
例如输入32145则输出该数为5位数 5 4 1 2 3(逆序输出每一位)3、打印出如下图案(菱形)*************************4、分解数字的立方任何一个自然数m的立方均可写成m个连续奇数之和。
例如:1^3=12^3=3+53^3=7+9+114^3=13+15+17+19输出样例:输入: 4输出:4^3=13+15+17+195、猜年龄美国数学家维纳(N.Wiener)智力早熟,11岁就上了大学。
他曾在1935~1936年应邀来中国清华大学讲学。
一次,他参加某个重要会议,年轻的脸孔引人注目。
于是有人询问他的年龄,他回答说:“我年龄的立方是个4位数。
我年龄的4次方是个6位数。
这10个数字正好包含了从0到9这10个数字,每个都恰好出现1次。
”请你编程实现计算他当时到底有多年轻,并输出他的年龄。
6、核桃的数量小张是软件项目经理,他带领3个开发组。
完整word版,ev3编程试题专业到大神26道题
完整word版,ev3编程试题专业到大神26道题程序001:利用我的模块改造“课程916025”中的“程序002”,将程序中的显示圆形的模块定义为我的模块,简化程序结构。
程序002:首先实现计算两个输入数值(输入参数)的平均值并输出(输出参数)的我的模块,然后编写程序调用这个我的模块进行平均值计算。
程序003:利用带输入参数的我的模块,改造“课程916023”中的“程序005”和“程序006”,使得这两个程序中对X、Y的值是否符合要求的判断过程分别用我的模块实现,X、Y则作为参数输入我的模块,是否符合要求作为输出参数输出逻辑值,使得这两个程序除了这个我的模块不同外,程序共他模块均相同。
程序004:利用主机的上下左右按钮,实现屏幕中间一个长宽为8的填充矩形显示位置上下左右移动,每次移动均判断该矩形是否与屏幕上同时显示的另外三个同样大小的不填充矩形发生了碰撞,如果碰撞了则发出一一次警告声音。
要求:矩形的显示、响应按钮按下并计算新坐标、判断矩形间是否相撞的功能均使用我的模块实现。
难度三:第二课程序001:定义数组Xa,并按顺序赋初始值“O”~“9”这10个数字,在屏幕上按索引值从小到大的顺序输出数组中的数字,每次显示1个数字,显示间隔1秒钟。
提示:利用数组长度控制一个循环的循环次数,读取数组内数值,循环一次显示一个数字,2.数组的使用:复习数组的附加和写入索引的含义和作用。
程序002:将“0”~“9”的数字顺序附加到数组Xa中,并在屏幕上按索引值从小到大的顺序输出数组中的数字,每次显示1个数字,显示间丽1秒钟。
提示:开始先利用循环模块将0°9附加到数组,然后利用数组长度控制一个循环的循环次数,读取数组内数值,一次循环显示一一个数字。
程序001:随机生成10个范围在1 100的随机数,并存入文件AAA”,供程序002读取。
程序002:从程序001主成的文件“AAA”读出10个数字,并依次显示在EV3屏幕上,数字间显示间隔1秒钟,最后等待3秒钟,程序结束。
蓝桥杯历届真题日志统计【第九届】【省赛】【B组】

蓝桥杯历届真题⽇志统计【第九届】【省赛】【B组】没有过多的技巧,我就是⼀个刷题的垃圾1 #include<bits/stdc++.h>2using namespace std;3bool vis[100010];4int ans;5struct node6 {7int ts;8int id;9 }a[100010];10bool cmp(node a,node b)//先排个序,如果编号相同的话就按照时间⼤⼩排序,否则按编号⼤⼩排序11 {12if(a.id==b.id)13return (a.ts<b.ts);14else15return a.id<b.id;16 }17int n,d,k;18int main()19 {20 ios::sync_with_stdio(false);21 cin>>n>>d>>k;22for(register int i=0;i<n;i++)23 {24 cin>>a[i].ts>>a[i].id;25 }26 sort(a,a+n,cmp);//排个序27for(register int i=0;i<n;i++)28 {29 ans=1;//它本⾝也是⼀个赞30if(!vis[a[i].id])// 没被标记过31 {32for(register int j=i+1;j<n;j++)33 {34if(a[i].id==a[j].id&&(a[j].ts<a[i].ts+d))//编号相等并且满⾜时间段35 {36 ans++;37 }38if(ans==k||a[i].id!=a[j].id)//剪枝39break;40 }41if(ans==k)//满⾜了最后的条件标记并且输出编号42 {43 vis[a[i].id]=true;//标记这个已经满⾜了44 cout<<a[i].id<<endl;//输出45 }46 }4748 }49return0;50 }。
2022年最新蓝桥杯stema-EV3测评
蓝桥青少三月STEMA-Ev3测评第一题硬件准备:EV3主机。
编程实现:红绿灯。
具体要求:1)运行程序,EV3主机状态灯颜色为绿色,不闪烁2)2秒后,EV3主机状态灯颜色变为红色,不闪烁3)2秒后,程序结束。
第二题硬件准备将一个超声波传感器连接到EV3主机的1口编程实现通过超声波传感器探测的距离来改变屏幕中的图像。
具体要求1)运行程序,如果超声波传感器探测的距离大于20,屏幕持续显示图像“信息”- "Accept" ;2)如果超声波传感器探测的距离小于等于20°屏幕持续显示图像"信息"-"Decline" ;3)重复1)、2)过程。
第三题硬件准备:EV3主机。
编程实现∶判断奇偶数。
具体要求1)运行程序,在屏幕(0,0)的位置显示“start”;2)按一次EV3主机上键,屏幕清屏,并在屏幕(0,0)的位置显示一个随机数字,数字范围为【1~100】;3)按一次EV3主机下键,如果数字为偶数,则在该数字的下方显示even,如果数字为奇数,则在该数字的下方显示odd;4)重复2)、3)过程。
第四题硬件准备:将一个大马达连接到EV3主机的A口,将一个触动传感器连接到EV3主机的2口。
编程实现:大马达的转动。
具体要求:1)运行程序,在屏幕(80,60)的位置持续显示字母“P”;2)如果按EV3主机上键,屏幕上的字母变成“D”;3)如果按EV3主机下键,屏幕上的字母变成“R”4)如果按EV3主机中间键,屏幕上的字母变成“N”;5)如果屏幕上的字母为"D",按下触动传感器,大马达会以60的功率开始转动,松开触动传感器,大马达停止转动6)如果屏幕上的字母为“R”,按下触动传感器·大马达会以-60的功率开始转动,松开触动传感器,大马达停止转动1007)如果屏幕上的字母为“N”,无论按下触动传感器,还是松开触动传感器,大马达都不会转动;8)重复上面的2),3),4),5),6),7)过程第五题硬件准备∶EV3主机。
第九届蓝桥杯c语言A试题及答案

第九届蓝桥杯c语言A试题及答案第九届蓝桥杯C语言A试题及答案1. 题目描述编写一个程序,实现以下功能:- 读取用户输入的整数n,表示一个正整数序列的长度。
- 读取用户输入的n个整数,存储到数组中。
- 计算数组中所有正整数的和,并输出结果。
2. 输入格式第一行输入一个整数n,表示序列的长度。
第二行输入n个整数,用空格分隔。
3. 输出格式输出一个整数,表示所有正整数的和。
4. 样例输入51 2 3 4 55. 样例输出156. 解答本题要求计算一个整数序列中所有正整数的和。
首先,我们读取用户输入的序列长度n,然后读取n个整数并将它们存储到数组中。
遍历数组,对数组中的正整数进行累加,最后输出累加的结果。
7. 代码实现```c#include <stdio.h>int main() {int n, sum = 0;scanf("%d", &n);int numbers[n];for (int i = 0; i < n; i++) {scanf("%d", &numbers[i]);if (numbers[i] > 0) {sum += numbers[i];}}printf("%d\n", sum);return 0;}```8. 分析- 程序首先通过`scanf`读取用户输入的序列长度n。
- 然后声明一个长度为n的数组`numbers`,用于存储用户输入的整数序列。
- 使用一个for循环读取n个整数,同时检查每个整数是否为正数,如果是,则将其累加到变量`sum`中。
- 最后,使用`printf`输出累加的结果。
9. 注意事项- 确保输入的序列长度n与实际输入的整数数量一致。
- 程序中没有对非正整数进行特殊处理,因为题目要求只计算正整数的和。
- 在实际编程中,应考虑输入数据的合法性检查,例如检查输入是否为整数等。
第十届蓝桥杯大赛青少年创意编程EV3组省赛-初级组
评分 栏
第1题 第1题
蓝桥杯大赛青少年创意编程 EV3 初级组
第2题
准考证号:_________________ 姓名:___________________
选择题(得分)
选择得分
总分
第3题
第4题
第5题
赛后统计 赛后统计
第2题
编程题(得分) 第3题
第4题
第5题
编程得分 赛后统计
上表由裁判填写,请参赛选手/阅卷裁判签名确认上述成绩准确无误,选手_________、裁判 _________
图 4-2
图 4-3
程序保存在“004”项目中,命名为“02”。
图 4-4
评判标准: 0 分:步骤 1 没有得到满分; 10 分:实现了顾客到店数量的显示,且确实因为传感器测量距离小于 15 厘米使得顾客到店数量增加了(虽
然不完全符合规则 4 要求); 20 分:在 10 分标准的基础上,顾客到店数量完全符合规则 4 要求,即传感器测量数值大于等于 15 厘米
注意事项:
1. 赛场内应保持安静,参赛选手间严禁互相交谈,违者将被取消比赛资格; 2. 比赛过程中,笔记本计算机及 EV3 主机不得开启 WLAN 或蓝牙等各种无线通讯功能,违者将被取消比
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
准考证号:_________________姓名:___________________评分栏选择题(得分)选择得分总分第1题第2题第3题第4题第5题赛后统计赛后统计编程题(得分)编程得分第1题第2题第3题第4题第5题赛后统计上表由裁判填写,请参赛选手/阅卷裁判签名确认上述成绩准确无误,选手_________、裁判_________注意事项:1.赛场内应保持安静,参赛选手间严禁互相交谈,违者将被取消比赛资格;2.比赛过程中,笔记本计算机及EV3主机不得开启WLAN或蓝牙等各种无线通讯功能,违者将被取消比赛资格;3.比赛过程中,应将准考证及身份证件放置桌子左上角,以备监考人员随时核对、检查;4.参赛选手的手机在检录后必须保持关闭状态直至比赛结束,违者将被取消比赛资格;5.比赛过程中,笔记本电脑须调为静音,EV3主机的音量须设置为10;6.请在做题之前认真阅读题目,编程题目设置有步骤分,即只完成部分功能也可以得到相应的分数;7.比赛答卷时间为90分钟;8.比赛结束后,请自行整理所有自带设备及配件,并妥善带出赛场,尤其不要遗漏电源、连线或细小积木零部件;9.比赛结束时裁判现场判卷结束后,本赛卷一律交给判卷裁判,比赛选手不得自行带走,否则取消比赛成绩。
一、选择题(单选题,每空50分)第一题(难度系数1)以下哪个程序可以实现:在EV3主机屏幕上显示“Hello!”字样,并保持5秒钟后结束程序?A:B:C:D:第二题(难度系数3)以下哪个程序可以实现:“将颜色传感器测量的反射光强度数值实时显示在EV3主机屏幕上”?A:B:C:D:以上程序均不能。
第三题(难度系数3)以下哪个程序可以实现:“在超声波传感器读数小于等于20厘米时,马达停转;大于20厘米时,马达转动”?A:B:C:D:以上程序都可以。
第四题(难度系数4)阅读程序后回答:在什么情况下,EV3主机状态灯会亮起?A:只有1口触碰传感器按下时;B:只有2口触碰传感器按下时;C:1口和2口触碰传感器均按下时;D:1口和2口触碰传感器均未按下时。
第五题(难度系数5)1.在使用超声波传感器探测距离时,如果故意用手完全扣住传感器的两个“眼睛”,超声波传感器测量的结果是(单位为厘米):A:测量的距离数值是0B:测量的距离数值是255C:报错,不返回数值D:以上都不对2.出现这个结果的原因是:A:超声波信号立刻返回被探测到,认为距离很近;B:超声波接收器收不到回波信号,认为在有效探测距离内没有障碍物;C:超声波接收器收不到回波信号,认为出现错误;D:以上都不对。
二、编程题第一题(难度系数1,满分100分)硬件准备:将一个触碰传感器连接到EV3主机的3口,将一个大马达连接到EV3主机的A口。
编程实现:大马达以40的功率持续转动,等待直至触碰传感器被按下后,大马达停止转动,程序结束。
程序保存在“1804”项目中,命名为“001”。
评判标准:40分:可以让大马达持续转动;80分:大马达持续转动,触碰传感器按下时,大马达停止转动,但出现程序未结束,或者松开触碰传感器后马达恢复转动,或有其它未能完全符合题目要求的问题;100分:完全符合题目要求。
第二题(难度系数3,满分100分)硬件准备:将超声波传感器连接到EV3主机的2口,将一个大马达连接到EV3主机的A口。
编程实现:程序持续运行。
当超声波传感器的探测距离大于等于20厘米时,A口的大马达以20功率持续转动,当超声波传感器的探测距离小于20厘米时,A口的大马达停止转动。
以“文本-像素”模式在EV3主机屏幕(0,0)处实时显示超声波传感器探测距离的数值,距离单位为厘米。
程序保存在“1804”项目中,命名为“002”。
评判标准:20分:无论何种状态下,可以让A口大马达转动,或者在屏幕左上角显示过超声波传感器的探测距离(不论数值是否产生了变化,或者显示的时间长短),但程序没有持续运行;40分:无论何种情况下,能让A口大马达持续转动;或者在屏幕左上角显示了超声波传感器的探测距离(不论数值是否产生了变化),且程序确实持续运行;80分:情况1,A口马达能在距离变化时能在转动和停止的状态间转换,但屏幕上不能实时显示超声波传感器的探测距离;情况2,屏幕上能实时显示超声波传感器的探测距离,但A口马达不能在距离变化时在转动和停止的状态间转换,或者状态转换的距离值不是20厘米左右;情况3,其他未能完全符合题目要求的问题;100分:完全符合题目要求。
第三题(难度系数4,满分100分)编程实现:程序持续运行。
程序开始时在EV3主机屏幕上显示以(80,60)为圆心坐标,半径为8的填充圆形。
用EV3主机的上、下、左、右按钮控制这个圆形分别向屏幕的上、下、左、右的方向移动,每一步移动的坐标数为10。
即每次移动时:按上键纵坐标减10,按下键纵坐标加10,按左键横坐标减10,按右键横坐标加10。
要求每次移动均可在屏幕上明确地观察到。
程序保存在“1804”项目中,命名为“003”。
评判标准:20分:程序开始时能在屏幕上显示圆形,而不论其大小、位置和填充与否;40分:程序开始时能按要求在屏幕上显示圆形,且能响应至少一个按钮的按下动作使得圆形的显示位置产生了变化(圆形消失了也算显示位置产生了变化);60分:能在屏幕上显示圆形,也能正确响应按钮的按下动作使得圆形按照对应的方向移动,但是不能让圆形持续向同一方向移动,或者移动的动作没有规律可循;80分:情况1,其他均符合题目要求,但圆形不是填充圆;情况2,其他均符合题目要求,圆形移动的方式正确但有的按钮所对应的移动方向有错误(例如按上键向下移动);情况3,其他均符合题目要求,但在移动方向交替变更(例如两次向右接着两次向上)的时候,圆形显示的位置出现不符合题意的跳跃;情况4,其他不符合题目要求的问题;100分:完全符合题目要求。
第四题(难度系数5,满分100分)硬件准备:用自带的EV3零件制作示意图4-1中的结构,并将左边的大马达连接在EV3主机A口,右边的大马达连接EV3主机D口。
示意图4-1编程实现:程序持续运行。
程序启动时A口和D口的马达均不转动,每当用手转动A口大马达上的牙齿零件一定角度并停止后,D口大马达所带动的牙齿零件应自动向相同方向转动并停留在同样的角度上。
程序运行过程中,以“文本-像素”模式在EV3主机屏幕(0,0)处实时显示A口大马达的当前旋转角度数。
程序保存在“1804”项目中,命名为“004”。
评判标准:20分:正确制作出示意图4-1中的结构;40分:情况1,结构制作正确;程序开始时两个马达均不转动,而一旦开始转动A口马达,D口马达也开始转动;情况2,主机屏幕上显示了A口马达旋转角度,且在转动A口马达数值后该数值也产生了变化;80分:情况1,其他均符合题目要求,但两个牙齿零件的转动方向相反;情况2,其他均符合题目要求,两个牙齿零件的转动方向相同,但转过的角度不同(且D马达所带动的牙齿零件最终停下了);情况3,其他均符合题目要求,但没有实时在屏幕上显示A口马达的旋转角度数;情况4,其他没有完全符合题目要求的情况;100分:完全符合题目要求。
第五题(步骤1难度系数6,满分100分,步骤2难度系数7,满分100分)步骤1:编程实现“数字比大小”游戏:(程序00501)游戏玩家判断EV3主机屏幕中显示的两个数字的大小关系,由程序判定游戏玩家的判断是否正确。
具体要求:程序启动后,生成两个1~6之间的随机数,并将这两个数字以“文本-像素”模式分别显示在EV3主机屏幕(30,30)和(130,30)处;同时,以“文本-像素”模式在屏幕(10,100)处显示“<”,(85,100)处显示“=”,(160,100)处显示“>”,如示意图5-1,并等待游戏玩家按下EV3主机上的相应按键做出选择:游戏玩家按下EV3主机的左键表示认为左边的数小于右边的数,按下中间键表示认为左右两边的数相等,按下右键表示认为左边的数大于右边的数。
如果游戏玩家通过按键做出的选择是正确的,则在屏幕(50,60)处以“文本-像素”模式增加显示“Right!”,否则增加显示“Wrong!”,如示意图5-2,在等待5秒钟后程序结束。
43<=>示意图5-143Wrong!<=>示意图5-2程序保存在“1804”项目中,命名为“00501”;注意不要与步骤2保存在同一程序中而影响评判。
评判标准:20分:屏幕上能完整显示出如示意图5-1的效果;40分:屏幕上能显示出如示意图5-1的效果,且两个数字确实为随机数,可通过多次执行程序来判断;70分:屏幕上能显示出如示意图5-1的效果,且两个数字确实为随机数,能对左、中、右这三个按键做出反应,并在屏幕上显示出示意图5-2的效果;100分:完全符合题目要求,即在70分标准的基础上,判断游戏玩家对与错的结论是正确的,这需要至少三次运行此程序来产生多种随机情况进行验证。
步骤2:以“步骤1”的游戏逻辑为基础,增加“统计20秒钟内得分”的功能。
(程序00502)具体要求:增加“在玩家多次进行游戏的过程中显示得分”的功能。
要求在程序启动时,以“文本-像素”模式在屏幕(85,0)处增加显示“0”作为当前得分,如示意图5-3,在每次游戏玩家判断正确时显示“Right!”且把得分加1;在判断错误时显示“Wrong!”且得分不变,同时在屏幕上更新当前得分,等待1秒钟后,就进行下一次游戏,只要不到规定时间(见下文)游戏就一直进行下去。
增加规定时间(20秒倒计时)功能。
程序开始时,以“文本-像素”模式在屏幕(0,0)处增加显示“20”,立刻开始倒计时20秒并在游戏过程中实时显示所剩秒数(要求显示的秒数为整数,不能出现小数部分),如示意图5-3,直到倒计时为0时,打断游戏进程(不等游戏玩家做出选择判断),立即结束游戏且清除屏幕,并将游戏玩家最终的得分以“文本-像素”模式显示在屏幕(85,60)处,如示意图5-4,保持5秒钟后,程序结束。
程序保存在“1804”项目中,命名为“00502”;注意不要与步骤1保存在同一程序中而影响评判。
评判标准:0分:未在步骤1中得到100分;50分:屏幕上能按照示意图5-3中显示得分(屏幕上方中间),并且随着游戏玩家的每次判断正确,得分均正确加1,且每次程序运行至少可以连续进行三次游戏;100分:完全符合题目要求。
即在50分标准的基础上,实现了实时显示秒数,且为20秒钟倒数计时,且时间的显示格式正确(未出现小数)、且在倒数到小于10秒钟时时间显示确实只有1位,且倒数到0秒时确实是立即结束游戏而无需等待游戏玩家按键,并如示意图5-4正确显示了得分,并保持5秒钟后程序结束。
再次强调:比赛结束后,本赛卷一律交给现场裁判,比赛选手不得带走,否则取消比赛成绩。