40000KN多功能电液伺服加载试验系统介绍
电液伺服试验机的技术参数是怎样的呢?
电液伺服试验机的技术参数是怎样的呢?
微机控制电液伺服试验机采用油缸下置式主机,主要用于金属、非金属的拉伸、压缩、弯曲和剪切试验。
电液伺服试验机技术参数:
1、试验力:300kN、600KN、1000KN、2000KN;
2、试验力测量范围:2%-100%FS;
3、试验力示值精度:示值精度±1%;
4、拉伸空间:600mm;
5、压缩空间:500mm;
6、扁试样夹持厚度:0-15;
7、圆试样夹持直径:Φ10-Φ32;
8、活塞位移示值精度:±0.5%FS.;
9、变形测量分辨率:0.001mm;
10、变形测量精度:±1%;
11、传感器:油压传感器、引伸计;
12、控制方式:电液伺服闭环控制,控制模式可平滑切换;
13、显示方式:
计算机屏幕显示试验力、活塞位移、试样变形测量值,屏幕显示试验曲线,屏幕调零、标定;
14、主机尺寸:约940mm×630mm×2010mm;
15、控制柜尺寸:1020mm×620mm×810mm;
16、主机重量:约2000kg;
17、总功率:2.5kW。
电液伺服试验机主要用于金属、非金属的拉伸、压缩和弯曲试验。
适用于冶金、建筑、轻工、航空、航天、材料、大专院校、科研单位等领域。
试验操作和数据处理符合GB228-2010《室温材料金属拉伸试验方法》的要求。
标签:
电液伺服试验机。
电液位置伺服控制系统实验
2
s2
2.834 2 0.866 1 2 s s s 1 2 14 .726 14 .726
正常参数时的ωc=2.78, ωh=14.8,Kg=19.1
增大Ki
正常参数
C (s) 4.611 R( s) 1 2 0.866 2 s 14 .726 2 s 14 .726 s 1
斜坡输入1
正弦输入
正弦输入,幅值5,频率1
正弦输入,幅值5,频率2.95
3 液压系统原理
压力传感器2
伺服缸
压力传感器3
平衡阀 电磁换向阀
蓄能器
电液伺服阀 压力传感器1
流量计2
流量计1 精滤器 电磁溢流阀
电机泵组
M
粗滤器 精滤器
4 系统控制原理
数据采集
参考输入
控制器
数模转换
功率放大
伺服阀
伺服缸
K i 73.746 KV 2.834 K d 1 26.022
K d1 h 代入系数得到 K d 1 26 .022 14 .726 h a a 0.12 (b K d 2 ) (b K d 2 ) (0.2 2.861) h h 0.866 2 K d1 a 2 K d 1 a 2 26.022 0.12
mmax 为能量输出单元在线 性范围内的最大值
r0,ml 为输入信号在线性范 围内的最大值
阶跃输入2.5
阶跃输入5
阶跃输入9
阶跃输入12
系统开环传递函数
KV C (s) R(s) 1 2 2 h s 2 s s 1 h h
Ki KV K d1
2)阀控缸微分方程
kN多功能电液伺服疲劳试验标准系统

500kN多功能电液伺服疲劳实验系统1.设备名称:500kN多功能电液伺服疲劳实验系统2.数量:1台3.产品要求:供应商需要提供完整的系统产品,包含所有的组件,例如载荷框架、控制系统、液压油源、电缆以及必要的连接件和附件等。
所提供的测试系统产品均为新品,不接受任何演示设备或者二手设备;所提供的测试系统产品必须为成熟产品,并且需要良好集成并且兼容当前的实验室条件。
任何概念性设计产品、组件或者未经确认的产品均不予以接受。
4.投标资质:*设备制造商应是国际知名品牌,在中国境内必须有分公司或者办事处,并且在国内有专门的售后服务部门和专业的售后人员。
经销商须具有相应的经营资质和制造商的授权。
招标文件对投标人的业绩要求和资格标准:*4」卖方必须拥有足够的应用经验,在中国境内已出售的同类产品应在至少10台并提供用户清单,买方有权核实卖方提供的用户清单,当买方需要时,卖方配合提供相关客户的联系方式进行确认,如果与实际不符,买方有权利取消投标人的投标资格。
4.2投标人必须提供营业执照复印件,及业绩的相关证明材料(复印件加盖公章);4.3如投标人是贸易代理商,应提供该设备的制造商出具的本次招标工程代理的授权函;4.4投标人开户银行的资信证明原件;4.5投标货物的制造商应具有ISO质量保证体系认证资质证明。
5.设备用途及基本要求:5.1用于测定混凝土试件在拉伸、压缩、弯曲和劈裂等加载模式下的应力- 应变曲线及蠕变、松弛特性,包括单轴拉伸、压缩、加卸载、循环加卸载、全过程应力应变曲线。
实验过程中可实时显示应力-应变曲线,可自动求出弹性模量、泊松比、屈服强度等。
可实现直接拉伸、压缩、弯曲和劈裂加载模式下频率在0.01Hz〜100Hz范圉内的动态疲劳实验,包括恒幅疲劳实验和弯曲实验等,具有自动幅值控制功能,使实验控制量在实验过程中保持很高的稳定度和精确度,通过T形平台,可以进行一定尺寸结构梁的相关实验。
5.2用于测定钢筋等筋材和棒材在拉伸下的应力-应变曲线,包括单轴拉伸、加卸载、循环加卸载、全过程应力应变曲线。
电液伺服系统

蓄能器
❖ 一个气—液式高压蓄压器装在油箱的旁边, 用来维持系统的压力,减小压力波动。此蓄 压器一侧预先充进的氮气压力与另一侧油系 统中的油压相平衡。此蓄压器块上有一个截 止阀,此阀能将蓄压器与系统隔绝,以进行 试验、重新充气或维修。蓄压器氮气一侧有 一个压力表,用以检查充氮压力
蓄能器
EH油系统的运行操作
❖ EH油泵出口滤网前后差压高 报警
❖ 低于9.31 Mpa(g) 汽轮机跳闸 (63/LP) 自动停机
❖ EH油压力回油压力高 回油压力报警 0.21MPa
EH油系统常见故障
❖ 1 系统压力下降,个别调门无法正常开启; ❖ 2 油动机卡涩,调门动作迟缓,有时泄油后不回座; ❖ 3 在开关调门过程中发生某个调门不规则频繁大幅度摆动,
同程度的腐蚀,在滑阀凸肩、喷咀及节流孔处腐蚀尤为严重。
❖ d 电液转换器滑阀两侧压力偏差大: 油中杂质堵塞电液转换器的喷咀;磨 擦、酸性腐蚀造成滑阀的凸肩、滑块与滑座之间磨损,使滑阀相对与滑 座之间的间隙加大,使漏流量增加;酸性油液对喷咀室、通道及节流孔 等的腐蚀,改变了滑阀两侧的压力。
❖ e LVDT线性电压位移转换器故障,电液转换器机械零位不准等
EH油系统 运 行
❖ EH油系统概述 ❖ 随着大容量、高参数汽轮发电机组的发展,
机组调节系统工作介质的额定压力随之升高, 对其工作介质的要求亦越来越高。通常所用 的矿物油自燃点为350℃左右,若在高参数大 容量机组使用,便增加了油泄漏到主蒸汽管 道(>530℃)导致火灾的危险性。为保证机组 的安全经济运行,汽轮机电液调节系统的控 制液普遍采用了磷酸酯抗燃油。
❖ 在机组预启动期间,EH油系统应进行升温、 升压。液压油的正常运行温度是49℃ (38℃~60℃),虽然允许系统可以在21℃ 油温下操作,但不推荐低于21℃油温下运行, 严禁在10℃下运行。因此预启动的第一步是 对油升温。 采用浸入式加热器升温
静力试验用电液伺服加载系统的分析和实验_如何实现高加载精度
(B eijing In stitu te of Con tro l Eng ineering, B eijing, 100081) (H a rb in In stitu te of T echno logy, H a rb in, 150001)
关键词 多点加载, 高d Exper im en ta l Research ing of Electro-Hydraul ic Servo L oad ing System for Sta tic Testing
—— How to Ach ieve H igh L oad ing Prec is ion
[ (A 21V 2 +
A 22V 1)
s
Βe
+
(A 1 -
A 2) 2cip +
(A
2 1
+
A
2 2
)
k
c
]s}
-
1
(7)
3 硬件抗干扰设计
静力试验伺服加载系统的控制硬件组成如图 3 所示。 图中 STD 5056 为 STD 总线 8098。单片微控 制器模板 STD 5781 是 8 位数字显示, 24 位小键盘 STD 总线接口板, STD 5484 是高速光电隔离 14 位 A D 转换 STD 总线接口板, STD 5313 是双向 T TL 电平输入 输出并行接口板, IPC5472 是光电隔离式 A D 转换 PC 总线接口板, IPC 5486 是光电隔离 8
因此, 在许多领域, 尤其是航天、航空等部门, 在 结构件的研制过程以及正式使用前, 都要进行静力 试验。
多点协调伺服加载系统是静力试验的关键设 备, 系统具有下述特点: a) 执行机构通常为对称阀 控制非对称缸, 因此正反向加载具有非线性。b) 载 荷值大, 通常为 10 kN~ 105 kN , 在加载过程中, 载 荷值的变化对加载特性会产生一定的影响, 同时, 被 加载结构件也可能随载荷值的变化而产生弹塑性变 形。c) 对于多点协调加载, 各加载通道间存在耦合, 对系统保持高加载精度有一定的影响。d) 随被加载 结构件的不同, 液压执行机构—— 伺服阀和油缸的 组合也不同, 不同的伺服阀、油缸和被加载结构件, 加载特性也不一样。e) 控制系统中, 既有伺服阀、电 磁截止阀等电感性负载, 他们在通断的瞬间, 会产生 瞬态冲击电流, 而且, 驱动电流也较大; 同时, 系统的 力检测元件的信号处理是模拟电路, 对电流变化敏 感; 另外, 试验现场往往需要离控制室有一定的距 离, 力传感器产生的微弱模拟信号受周围环境的干 扰较深; 系统控制电路既有模拟也包括数字, 既有大 电流信号也有小电流微弱信号, 相互之间形成干扰。 上述原因, 对系统的加载精度造成严重的干扰。
飞机地面模拟试验反推力电液加载系统的实现
飞机地面模拟试验反推力电液加载系统的实现施光林;泮健【摘要】介绍了一种专用于飞机地面模拟气动加载试验的电液伺服系统;详细分析了该电液伺服加载系统的结构与特点;重点叙述了系统的具体控制策略;分别给出了在终止反推状态、正常着落状态和收回状态下的试验结果.试验结果表明,所研究的反推力电液伺服加载系统的动态力跟踪误差不大于15%,达到了工程实际应用的目的.【期刊名称】《中国机械工程》【年(卷),期】2010(021)001【总页数】4页(P42-45)【关键词】飞机;地面模拟;反推力;电液伺服加载系统;动态力跟踪误差【作者】施光林;泮健【作者单位】上海交通大学,上海,200240;上海交通大学,上海,200240【正文语种】中文【中图分类】TH1370 引言飞机速度的提高和机翼载荷的增大必然使飞机起飞和着陆滑跑距离增大,如果要缩短着陆滑跑距离则经常要一些专用的减速装置,常用的减速装置就是反推力装置。
在军用方面,反推力装置在缩短飞机滑跑距离的同时还大大提高了飞机的作战效能。
在民用方面,反推力装置可以对民航建设产生重大影响。
自从采用反推力装置以来,飞机的着陆滑跑距离已经由3000m缩短到450m以内[1]。
因此,反推力装置在民用飞机的设计中有着十分重要的作用。
在我国某型民用飞机的研制过程中,反推力装置必须在模拟气动载荷下完成测试试验,以检验反推力装置功能和性能。
因此,在液压系统地面模拟试验中,需配置一套反推力装置加载系统和相应的试验台架,实现对反推力装置在展开和收起过程中所受气动载荷的模拟;并进一步考核反推力装置的各种性能指标,为反推力系统及全机液压系统的适航符合性提供试验依据。
同时,电液伺服加载系统也是一种使用广泛的系统,国内外开展了许多类似的研究[2-3]。
王益群等[4]总结了近年来电液力控制的一些进展。
王辉等[5]在飞行模拟器操纵负荷控制系统中,采用位置闭环控制、速度闭环控制和力闭环控制三种方式实现驾驶员在操纵时的力感觉,取得了理想的效果。
电液伺服控制系统概述

电液伺服控制系统概述摘要:电液伺服控制是液压领域的重要分支。
多年来,许多工业部门和技术领域对高响应、高精度、高功率——重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在原件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
关键词:电液伺服控制液压执行机构伺服系统又称随机系统或跟踪系统,是一种自动控制系统。
在这种系统中,执行元件能以一定的精度自动地按照输入信号的变化规律动作。
液压伺服系统是以液压为动力的自动控制系统,由液压控制和执行机构所组成。
一、电液控制系统的发展历史液压控制技术的历史最早可以追溯到公元前240年,一位古埃及人发明的液压伺服机构——水钟。
而液压控制技术的快速发展则是在18世纪欧洲工业革命时期,在此期间,许多非常实用的发明涌现出来,多种液压机械装置特别是液压阀得到开发和利用,使液压技术的影响力大增。
18世纪出现了泵、水压机及水压缸等。
19世纪初液压技术取得了一些重大的进展,其中包括采用油作为工作流体及首次用电来驱动方向控制阀等。
第二次世界大战期间及战后,电液技术的发展加快。
出现了两级电液伺服阀、喷嘴挡板元件以及反馈装置等。
20世纪50~60年代则是电液元件和技术发展的高峰期,电液伺服阀控制技术在军事应用中大显身手,特别是在航空航天上的应用。
这些应用最初包括雷达驱动、制导平台驱动及导弹发射架控制等,后来又扩展到导弹的飞行控制、雷达天线的定位、飞机飞行控制系统的增强稳定性、雷达磁控管腔的动态调节以及飞行器的推力矢量控制等。
电液伺服驱动器也被用于空间运载火箭的导航和控制。
电液控制技术在非军事工业上的应用也越来越多,最主要的是机床工业。
在早些时候,数控机床的工作台定位伺服装置中多采用电液系统(通常是液压伺服马达)来代替人工操作,其次是工程机械。
电液伺服系统的原理及应用

电液伺服系统的原理及应用一.电液伺服系统概述电液伺服系统在自动化领域是一类重要的控制设备,被广泛应用于控制精度高、输出功率大的工业控制领域.液体作为动力传输和控制的介质,跟电力相比虽有许多不甚便利之处且价格较贵,但其具有响应速度快、功率质量比值大及抗负载刚度大等特点,因此电液伺服系统在要求控制精度高、输出功率大的控制领域占有独特的优势。
电液伺服控制系统是以液压为动力,采用电气方式实现信号传输和控制的机械量自动控制系统。
按系统被控机械量的不同,它又可以分为电液位置伺服系统、电液速度伺服控制系统和电液力控制系统三种。
我国的电液伺服发展水平目前还处在一个发展阶段,虽然在常规电液伺服控制技术方面,我们有了一定的发展。
但在电液伺服高端产品及应用技术方面,我们距离国外发达国家的技术水平还有着很大差距。
电液伺服技术是集机械、液压和自动控制于一体的综合性技术,要发展国内的电液伺服技术必须要从机械、液压、自动控制和计算机等各技术领域同步推进。
二.电液伺服的组成电液控制系统是电气液压控制系统简称,它由电气控制及液压两部分组成。
在电子-液压混合驱动技术里,能量流是由电子控制,由液压回路传递,充分结合了电子控制和液压传动两者混合驱动技术的优点避免了它们各自的缺陷。
⑴电子驱动技术的特点①高精度、高效率,低能耗、低噪音②高性能动态能量控制③稳定的温度性能④能量再生及反馈电网⑤在循环空闲的时间没有能量损失⑵液压驱动技术的特点①高(力/功)密度②结构紧凑③液压马达(油缸)是大功率且经济的执行元件④在液压系统做压力控制的时候有明显的能量流失液压部分:以液体为传动介质,靠受压液体的压力能来实现运动和能量传递。
基于液压传动原理,系统能够根据机械装备的要求,对位置、速度、加速度、力等被控量按一定的精度进行控制,并且能在有外部干扰的情况下,稳定、准确的工作,实现既定的工艺目的。
(工控网)液压伺服阀是输出量与输入量成一定函数关系,并能快速响应的液压控制阀,是液压伺服系统的重要元件。
电液伺服万能材料试验机
电液伺服万能材料试验机电液伺服万能材料试验机是一种用于测试材料性能的设备,它可以对各种材料进行拉伸、压缩、弯曲等多种试验,广泛应用于材料科学研究、工程材料质量监测以及生产现场的质量控制等领域。
本文将介绍电液伺服万能材料试验机的结构、工作原理以及在材料试验中的应用。
首先,我们来看看电液伺服万能材料试验机的结构。
它通常由机械部分、液压系统、传感器和控制系统组成。
机械部分包括主体结构、夹具和加载系统,用于施加力和测量变形。
液压系统提供动力,通过调节液压缸的压力和流量来控制加载过程。
传感器用于测量试验过程中的力、位移和变形等参数,将这些参数传输给控制系统。
控制系统根据预设的加载程序,控制液压系统的工作,实现对试样的加载和控制。
其次,我们来了解一下电液伺服万能材料试验机的工作原理。
在进行试验之前,首先需要安装试样,并根据试验要求选择合适的夹具。
然后通过控制系统设定试验条件,包括加载速度、加载范围、保持时间等。
在试验过程中,液压系统根据控制系统的指令施加相应的载荷,同时传感器实时监测试样的力学性能参数。
当达到设定的终止条件时,试验结束,控制系统停止加载并记录试验数据。
通过分析这些数据,可以得到材料的拉伸强度、屈服强度、模量等重要性能参数。
最后,我们来探讨一下电液伺服万能材料试验机在材料试验中的应用。
它可以对金属、塑料、橡胶、复合材料等各种材料进行静态、动态、疲劳等多种试验,如拉伸试验、压缩试验、弯曲试验、剪切试验等。
通过这些试验,可以评估材料的力学性能、疲劳性能、断裂韧性等指标,为材料的设计、选择和加工提供依据。
同时,电液伺服万能材料试验机还可以用于产品质量监测,对各种零部件和成品进行质量检验,确保产品符合标准要求。
综上所述,电液伺服万能材料试验机是一种功能强大、应用广泛的材料试验设备,它在材料科学研究、工程材料质量监测以及生产现场的质量控制中发挥着重要作用。
通过对其结构、工作原理和应用的了解,可以更好地利用这一设备,推动材料科学和工程技术的发展。
40000kN多功能电液伺服加载试验系统

摘
要
介 绍 了 4 0 N 多功能 电液 伺服加 载 试验 系统 的机械 主 体 结构 和基 本 功 能 、 术 性 能、 制 00 0 k 技 控
极 为 迫切 。
设 备 的优 点 , 可用 来 完 成 大 吨位 足 尺 构 件 的 竖 向 轴压 , 压剪 和节 点 动载试 验 。
2 系统 机 械 主 体 结 构 和 基 本 功 能
本 系 统 由 4 0 N 保 载 加 载 系 统 1套 、 000 k
40 0k 动 载加 载 系统 1套 和 20 0k 0 N 0 N动载 加载
2 ejn T ce c .B i gF S S in e& T c n lg o t i e h oo yC .Ld,C a g ig D s it ej g1 2 0 h n pn it c ,B in 0 2 9,C ia r i hn )
A bsr t M e h n c l tu t r t ac c a ia sr c u e, ma n u to i f ncin, t c ia p r me e s c n r l r n c nr l ot r o e hn c l a a tr , o tol a d o to s fwa e f e 4 0 N u f n to a e to h d a lc S r o Lo d S se a e i r d e 0 0 0 k M hiu ci n lEl cr — y r u i e v a y tm r nto uc d. Fu lCu v ff l l n t l r e o ul e gh RC Coumn l s,Diplc m e tFo c ve o u lln t o e n s lc me tFo c r e o ulln t s a e n — r e Cur ff l e g h RC n d sa d Dip a e n — r eCu ff l e g h Rub v — b r Be rn n e r s u e s e fl a a ie y t i y tm . I i n fmu f cina o d s se s e a i g u d rp e s r — h a o d c n be gv n b h s s se t so e o hi un to lla y tm . K e w o ds f ll n t y r ul e gh,c mb n d t s , f l Cur e, RC n d o i e e t ul v o e,p e s r - h a e t r s u e s e rt s
电液伺服系统
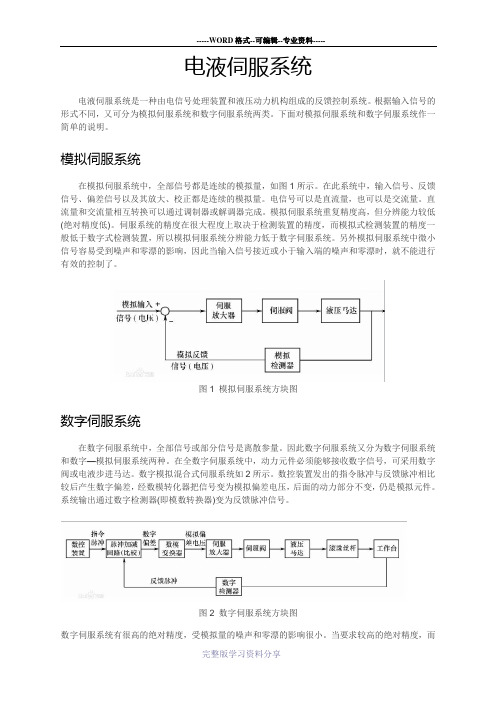
电液伺服系统电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
根据输入信号的形式不同,又可分为模拟伺服系统和数字伺服系统两类。
下面对模拟伺服系统和数字伺服系统作一简单的说明。
模拟伺服系统在模拟伺服系统中,全部信号都是连续的模拟量,如图1所示。
在此系统中,输入信号、反馈信号、偏差信号以及其放大、校正都是连续的模拟量。
电信号可以是直流量,也可以是交流量。
直流量和交流量相互转换可以通过调制器或解调器完成。
模拟伺服系统重复精度高,但分辨能力较低(绝对精度低)。
伺服系统的精度在很大程度上取决于检测装置的精度,而模拟式检测装置的精度一般低于数字式检测装置,所以模拟伺服系统分辨能力低于数字伺服系统。
另外模拟伺服系统中微小信号容易受到噪声和零漂的影响,因此当输入信号接近或小于输入端的噪声和零漂时,就不能进行有效的控制了。
图1 模拟伺服系统方块图数字伺服系统在数字伺服系统中,全部信号或部分信号是离散参量。
因此数字伺服系统又分为数字伺服系统和数字—模拟伺服系统两种。
在全数字伺服系统中,动力元件必须能够接收数字信号,可采用数字阀或电液步进马达。
数字模拟混合式伺服系统如2所示。
数控装置发出的指令脉冲与反馈脉冲相比较后产生数字偏差,经数模转化器把信号变为模拟偏差电压,后面的动力部分不变,仍是模拟元件。
系统输出通过数字检测器(即模数转换器)变为反馈脉冲信号。
图2 数字伺服系统方块图数字伺服系统有很高的绝对精度,受模拟量的噪声和零漂的影响很小。
当要求较高的绝对精度,而不是重复精度时,常采用数字模拟系统。
从经济性可靠性方面来看,简单的伺服系统采用采用模拟型控制为宜。
系统特点及使用场合电液伺服系统综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。
因此,在负载质量大又要求响应速度快的场合最为适合,其应用已遍及国民经济的各个领域,比如飞机与船舶舵机的控制、雷达与火炮的控制、机床工作台的位置控制、板带轧机的板厚控制、电炉冶炼的电极位置控制、各种飞机车里的模拟台的控制、发电机转速的控制、材料试验机及其他实验机的压力控制等等。
电液伺服程控结构试验机介绍
建筑结构抗震试验设备与试验方法——电液伺服程控结构试验机介绍1功能该实验设备是以建筑的抗震试验为主要目的,对工程结构的构件或结构的模型或实体进行静力、动力、振动或疲劳等各种性能试验的设备,是根据拟定的实验对象规模自行总体设计的试验设备系统。
它包括有(1)试验台承力系统(2)液压加载设备系统(3)电液伺服控制系统(4)数据采集和处理系统(5)电子计算机系统本试验设备系统是按照可以对四层以下的住宅单元实际结构或高层建筑的整体,模型进行静载、动载、随即疲劳、伪静力和拟动力试验而配置的。
利用自制配套装置也可以进行一定规模的地震模拟试验,目前已经设计组装了吊杆式台面并进行了外接输入随即位移谱的试验,效果良好。
该设备对工程结构,建筑结构进行动力性能的测定或检验。
2测试方法众所周知,结构试验是建筑结构设计,施工和研究的重要环节,而工程结构抗震试验又是建筑结构抗震研究的重要组成部分。
为了更好的研究工程结构找地震干扰下的受力性能和破坏机理,全面观测其破坏的全程,常需要展开一系列结构模型以至建筑物实体的试验,从荷载模拟,动态反应的观测到数据采集和处理等都从单一静止孤立向整体的动态的而且要实时的连续的方向发展,从弹性非破坏向弹塑性极限状态发展这无疑对测试手段和测试设备提出了许多新的要求,近年来国内外都对新的实验设备和新的测试方法进行研究。
目前在结构抗震研究中广泛采用的伪静力试验方法是一种对结构或构件超过弹性极限以后的性能进行试验的方法,是研究在低周期反复荷载下并进入塑形阶段构件或结构的强度,利用低周期反复循环加载方法进行以获得结构的非弹性荷载——变形特性,以了解结构或构件的恢复力特性并有充分时间来观察结构的变形状态等优点;但由于其可以利用手控加载和人工记录观测数据与现有的测试设备的功能相适应而得到推广。
新购置的测试设备仍以进行此种试验为主要目的,但由于其能自动控制加载,并自动采集数据,及时处理打印数据或绘成曲线,将大大提高试验的精度和可靠度。
电液伺服万能试验机使用说明
电液伺服万能试验机使用说明一、试验机结构简介本实验室的电液伺服万能试验机,系由传统的国产WE系列的液压式万能试验机配以数字阀、力-应变-位移三路传感器及微机控制改制、升级而成,与现代国内外流行的WAW系列微机控制电液伺服万能试验机具有相同的功能、工作原理与结构。
所不同的只是工作油缸的位置:WE系列设置在机架上方称上置式;而WAW系列在下方称下置式。
能兼作拉伸、压缩及弯曲等多种实验的试验机成为万能材料试验机,简称万能机。
1、加载系统来自油泵的压力油抬起机架,使工作台上升,根据试样的不同位置产生拉伸或压缩变形。
一般试样的力值由油路上的压力传感器输出。
本试验机为提高测力精度,试样力值是由安装在机架顶部的负载传感器直接输出的,克服了油缸活塞间的摩擦力影响。
加载的快慢由系统中的数字比例节流阀,通过计算机反馈控制自动调节阀口开度来实现。
2、应变、位移测量系统试样的应变及位移分别由引伸计及位移传感器输出,经过高精度放大器,其值在计算机屏幕上显示。
3、控制系统试验机具有试验力值、工作台位移及试样应变三路控制,分别由多功能计算机软件操作。
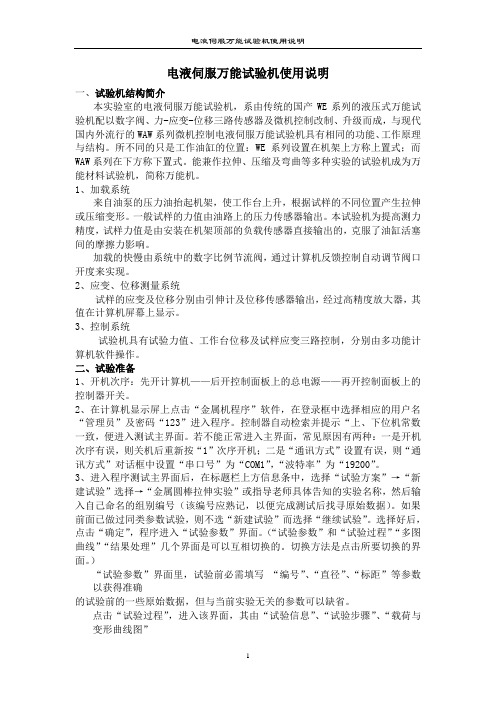
二、试验准备1、开机次序:先开计算机——后开控制面板上的总电源——再开控制面板上的控制器开关。
2、在计算机显示屏上点击“金属机程序”软件,在登录框中选择相应的用户名“管理员”及密码“123”进入程序。
控制器自动检索并提示“上、下位机常数一致,便进入测试主界面。
若不能正常进入主界面,常见原因有两种:一是开机次序有误,则关机后重新按“1”次序开机;二是“通讯方式”设置有误,则“通讯方式”对话框中设置“串口号”为“COM1”,“波特率”为“19200”。
3、进入程序测试主界面后,在标题栏上方信息条中,选择“试验方案”→“新建试验”选择→“金属圆棒拉伸实验”或指导老师具体告知的实验名称,然后输入自己命名的组别编号(该编号应熟记,以便完成测试后找寻原始数据)。
如果前面已做过同类参数试验,则不选“新建试验”而选择“继续试验”。
电液伺服疲劳试验机技术参数-武汉理工大学

电液伺服疲劳试验机技术参数-武汉理工大学电液伺服疲劳试验机技术参数一、内容概述1供货地点:武汉理工大学2供货时间:合同签订后6个月.3本文件是作为供应商所需达到的最低要求。
任何对于这些要求的改变或偏差都需要得到买方书面同意。
4供应商应该负责沟通和实施以达到本文件的要求。
5采购合同中的相关条款和情况应与本文件相一致。
6设备名称和数量7.1系统由龙门架一套、作动器一个、控制器一套、分油器一套、配套软件一套、工作站一台和相关的配套管路构成。
7.2系统所用油源为招标方现有油源:总流量400L/min,工作油压21MPa,电机功率4*45kW。
7.3 招标方提供液压油和滤芯,油源油品清洁度达NAS5级,油源系统高压过滤精度3μm,回油过滤精度10μm。
招标方负责油源清洗换油工作。
★7.4所匹配控制器和分油器需要满足后期建设增加作动器时的可扩展为1/2悬架试验台的需求。
8设备购买方式:投标方应负责系统的设计、制造、安装调试、人员培训、试验设备的集成和售后服务等,并对其承包的设备质量、集成的采集仪与设备匹配性、适用性和交货期等负全责,实现交钥匙工程。
9交货期:合同签订并收到预付款后6个月,包括设备的设计、制造、运输、安装调试、培训的时间等。
10交货地点:招标方现场二、投标要求1投标方须仔细阅读招标文件的全部条款,并做出明确的响应。
2投标报价:2.1投标货币:人民币或美元2.2投标报价有效期为90天。
3投标方递交投标文件的同时,需提供与投标文件内容一致的光盘一张(并注明投标厂家及投标品目)。
4投标方及制造商资质要求4.1制造商自2014年1月1日起至今在在中国境内已中标的的同类货物不少于10套,要求市场上无重大或无法整改的质量问题反映。
其中在高校或整车企业类似的设备不少于3套,且需提供有效证明资料:合同(包含但不限于合同有效页复印件、合同双方名称、设备名称、合同签订时间等),验收证明或最终客户使用良好证明信。
4.2投标方在中国国内必须有办事机构以及为该系统设专门的售后维修服务人员,且售前售后服务质量高、信誉好。
40 000 kN多功能电液伺服加载试验系统
40 000 kN多功能电液伺服加载试验系统
陈利民;李振宝;周宏宇;闫维明;李洪泉;黄浩华;刘杰
【期刊名称】《结构工程师》
【年(卷),期】2011(027)0z1
【摘要】介绍了40 000 kN多功能电液伺服加载试验系统的机械主体结构和基本功能、技术性能、控制器和控制软件.该系统可进行足尺构件的组合试验,如柱子静压全曲线试验、梁柱节点动载试验和橡胶支座压剪试验等,是一种多功能加载设备.【总页数】4页(P27-30)
【作者】陈利民;李振宝;周宏宇;闫维明;李洪泉;黄浩华;刘杰
【作者单位】北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京工业大学工程抗震与结构诊治北京市重点实验室,北京,100124;北京富力通达科技有限公司北京市昌平区宏翔鸿企业孵化基地,北京102209
【正文语种】中文
【相关文献】
1.40000kN多功能电液伺服加载试验系统 [J], 陈利民;李振宝;周宏宇;闫维明;李洪泉;黄浩华;刘杰
2.PLC在电液伺服双通道协调加载试验系统中的应用 [J], 张立;韩作庆
3.电液伺服加载试验系统仿真研究 [J], 刘博;王晓晖;杨志鹏;张静;侯京锋
4.基于LabVIEW的电液伺服加载试验台测控系统设计 [J], 侯伟;辛慧娟;张慧;刘凯强;宁朝阳
5.长飞亚电动注塑技术覆盖400~33 000 kN [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
多通道电液伺服加载系统
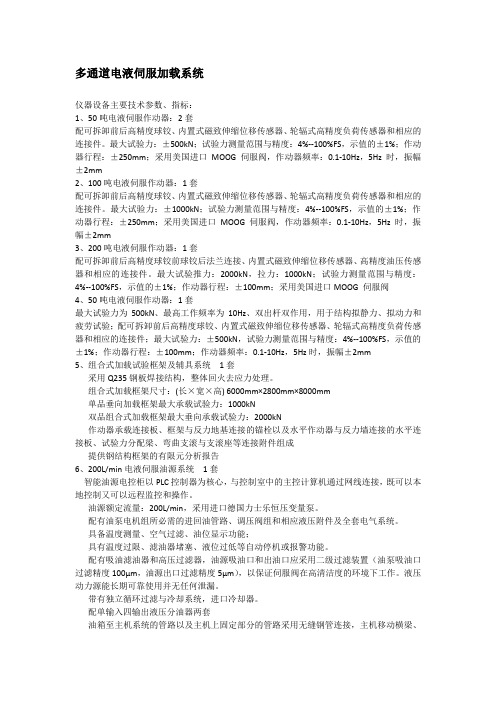
多通道电液伺服加载系统仪器设备主要技术参数、指标:1、50吨电液伺服作动器:2套配可拆卸前后高精度球铰、内置式磁致伸缩位移传感器、轮辐式高精度负荷传感器和相应的连接件。
最大试验力:±500kN;试验力测量范围与精度:4%--100%FS,示值的±1%;作动器行程:±250mm;采用美国进口MOOG 伺服阀,作动器频率:0.1-10Hz,5Hz时,振幅±2mm2、100吨电液伺服作动器:1套配可拆卸前后高精度球铰、内置式磁致伸缩位移传感器、轮辐式高精度负荷传感器和相应的连接件。
最大试验力:±1000kN;试验力测量范围与精度:4%--100%FS,示值的±1%;作动器行程:±250mm;采用美国进口MOOG 伺服阀,作动器频率:0.1-10Hz,5Hz时,振幅±2mm3、200吨电液伺服作动器:1套配可拆卸前后高精度球铰前球铰后法兰连接、内置式磁致伸缩位移传感器、高精度油压传感器和相应的连接件。
最大试验推力:2000kN,拉力:1000kN;试验力测量范围与精度:4%--100%FS,示值的±1%;作动器行程:±100mm;采用美国进口MOOG 伺服阀4、50吨电液伺服作动器:1套最大试验力为500kN、最高工作频率为10Hz、双出杆双作用,用于结构拟静力、拟动力和疲劳试验;配可拆卸前后高精度球铰、内置式磁致伸缩位移传感器、轮辐式高精度负荷传感器和相应的连接件;最大试验力:±500kN,试验力测量范围与精度:4%--100%FS,示值的±1%;作动器行程:±100mm;作动器频率:0.1-10Hz,5Hz时,振幅±2mm5、组合式加载试验框架及辅具系统1套采用Q235钢板焊接结构,整体回火去应力处理。
组合式加载框架尺寸:(长×宽×高) 6000mm×2800mm×8000mm单品垂向加载框架最大承载试验力:1000kN双品组合式加载框架最大垂向承载试验力:2000kN作动器承载连接板、框架与反力地基连接的锚栓以及水平作动器与反力墙连接的水平连接板、试验力分配梁、弯曲支滚与支滚座等连接附件组成提供钢结构框架的有限元分析报告6、200L/min电液伺服油源系统1套智能油源电控柜以PLC控制器为核心,与控制室中的主控计算机通过网线连接,既可以本地控制又可以远程监控和操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
40000KN多功能电液伺服加载试验系统
1
机械结构和基本功能
2
控制器和控制软件
3
典型试验
4
改进和完善
2000KN 动载系统
2套
40000KN 静载系统
1套
4000KN 动载系统
1套
机械构成
40000KN多功能 电液伺服加载试验系统
40000KN
1
系 统 示 意 图
通道级、伺 服控制器
阀驱动模块
实时控制级
• 传感器激励,传感器信号调零、放大、滤波A/D转换 • 传感器增益设定,传感器信号极限监测和报警
• 通道级:波形发生、加载和卸载 • 伺服控制器:PID参数调节及输出控制
• 完成指令信号的V — I 转换,驱动电液伺服阀
静态误差
≤±0.2% (Fs)
动态精度:幅值误差
正弦波、三角波、 拍波、方波、斜 波、随机波、地 震波
➢试件规格
➢控制参数
➢加载波形
4000KN动载加载系统主要技术参数
管理级
上位机:系统参数管理、试验参数 管理、实验数据管理、试验管理等
控制级
反馈调节、伺服控制、阀驱动
控制 系统
协调级
下位机:各通道协调加载
Click to edit title style
机械结构和基本功能
典型验 改进和完善
1
机械结构和基本功能
典型验
配套工装一:柱子轴压试验小车
改进和完善
1
机械结构和基本功能
典型验
配套工装二:橡胶支座压剪试验小车
改进和完善
座配
压套
剪工 试装
1
验三
联:
接橡
板胶
支
机械结构和基本功能
典型验 改进和完善
40000KN静载系统
0 ~ 40000KN轴向静载 力控精度:0.2% 位控精度:0.2%
轴向载荷 KN
40000 35000 30000
实
215000
验
20000
结
15000
果
10000
5000
0 0 20 40 60 80 100 120 轴向位移 mm
50
40
轴向应力(MPa)
30
1
20
10
0
0
0.004
0.008
0.012
0.016
0.02
LaC3
Lb轴C3向应变
LcC3
L3
2.节点梁宽: 5800 ~6800mm
3.活塞行程, ±250mm
4.试件截面:1200 mm×1200mm
5.横梁上平面距地 板:1500 ~ 5000mm
6.南面试件空间比 北面略小
➢试件规格
1.控制方式:力控、 位控
2.控制方式可自由 切换
3.力控精度<0.2% 4.位控精度<0.2% 5.同向同步和反向
1.上下球面副各一 套
2.轴压小车一套 3.压剪小车一套 4.压剪上连接板:
与下横梁焊接 5.压剪下连接板:
与压剪小车螺栓 连接 6.试验防护装置
➢力学性能
➢试件规格
➢控制参数
➢配套工装
40000KN静载加载系统主要技术参数
1.垂向力:0 ~ 2000KN
2.力传感器误差: <1%
➢力学性能
1.试件高度:0 ~ 8000mm
试件均以斜向剪切滑移为最终破坏形态。随着体积配箍率的 提高,斜裂缝与试件纵轴线之间的夹角越来越大,极限承载 力有所提高,延性也得到相应的改善。
课题名称
钢筋混凝土构件破坏 机理与尺寸效应研究
课题来源
1
国家自然科学基金
课件尺寸
柱高:3000mm 梁宽:6800mm
2.活塞行程,即试 件最大允许变形: ±300mm
3.试件截面:1200 mm×1200mm
4.柱间空间: 2500mm×2500m m
1.控制方式:力控、 位控
2.控制方式可自由 切换
3.力控精度<0.2% 4.位控精度<0.2% 5.压剪试验时,60
秒内,40000KN 活塞振幅1cm, 压力波动<1%
40000KN
1
系 统 轴 压 示 意 图
机械结构和基本功能
典型验 改进和完善
40000KN
1
系 统 节 点 示 意 图
机械结构和基本功能
典型验 改进和完善
40000KN
1
系 统 压 剪 示 意 图
机械结构和基本功能
典型验 改进和完善
40000KN
1
千 斤 顶 试 验 示 意 图
机械结构和基本功能
典型验 改进和完善
40000KN
1
机械结构和基本功能
系
统
正
面
典型验
图
改进和完善
40000KN
1
系 统 侧 面 图
机械结构和基本功能
典型验 改进和完善
1.轴力:0 ~ 40000KN轴力
2.抵消侧向力: 4000KN
3.油压传感器误差: <1%
4.力传感器误差: <1%
1.试件高度:0 ~ 8000mm
幅值、相 位、幅相
性能 指标
≤±0.2% (Fs)
修正算法 ≤ 2° 动态精度:相位误差
控制系统架构
1
机械结构和基本功能
典型验 改进和完善
课题名称 钢筋混凝土构件破坏机理与尺寸效应研究
课题来源
1
国家自然科学基金
课题负责人 杜修力 教授
试验 陈利民 符佳
试件尺寸 800mm×800mm×2400mm
同步 6.最大速度:
200mm/s 7.频率:0 ~5Hz
正弦波、三角波、 拍波、方波、斜 波、随机波、地 震波
➢控制参数
➢加载波形
2000KN动载加载系统主要技术参数
1.水平力:0 ~ 4000KN
2.力传感器误差: <1%
3.滑动摩擦系数 <0.25%
➢力学性能
1.试件高度:0 ~ 8000mm
力传感器和油压传感器
2000KN动载系统
0 ~ 2000KN同步异步动载 力控精度:0.2% 位控精度:0.2% 力传感器
主要 功能
组合功能
压剪 轴压+边节点低周反复加载 轴压+十字节点低周反复加载 其他(需要另外工装配合)
4000KN动载系统
0 ~ 4000KN垂向压力 力控精度:0.2% 位控精度:0.2% 力传感器
2.活塞行程,即试 件最大允许水平 变形:±600mm
3.试件截面: Φ 1900mm
4.节点横梁上平面 距地板:1500 ~ 5000mm
5.作动器垂向行程: 2000mm
1.控制方式:力控、 位控
2.控制方式可自由 切换
3.力控精度<0.2% 4.位控精度<0.2% 5.最大速度:
62.8mm/s 6.频率:0 ~1Hz
管理级
系统参数管理 试验参数管理 试验数据管理
试验管理
• 传感器参数设定 • 系统控制参数设定
• 试验谱编制 • 试验控制参数
• 试验数据接收、显示、存储等 • 试验数据处理
• 试验过程干预,如卸载、暂停等 • 试验谱加载
协调修正级
▪ 时限判定 ▪ 误差判定 ▪ 幅值、相位同步修正 ▪ 超差相应
反馈调节器