绝对旋转编码器
SICK绝对式编码器
R=最 小 弯 曲 半 径4 0 mm
其 它 公 差 遵 循DIN ISO-2768-mk标准
出线方式 径向出线式
径向插头式
附件 接线电缆 通孔轴套 S S I串 口 转 并 口 模 块
C1-6
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件轴允许跳动
轴向出线式
径向插头式
轴向出线式
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件允许轴跳动
轴承使用寿命 工作温度 存储温度 允 许 相 对 湿 度1) 抗振性能
外壳防护等级 IEC 60529
质 量5)
A R S 6 0盲 孔 型
电气参数
工作电压 工作电流
测量量程 分辨率 角度分辨率 测量误差
重复精度 角度分辨率偏差
测量值回差 响应阈值 输出接口 输出码
编 码 方 向6) “控制输入”的 "电 脉 冲"信 号 零 位 设 定 时 间7) 上电初始化时间 EMC8)
10-32V DC SSI:60mA 并 口:90mA
1圈
2...32,768(参见 订货 信息) 360°/分辨 率 2 n 分 辨率: 0.035° 非2 n 分 辨 率: 0.046° 0.005° 2 n 分 辨 率: 0.005° 非2 n 分 辨 率: 0.016°
分辨率 1...32,768
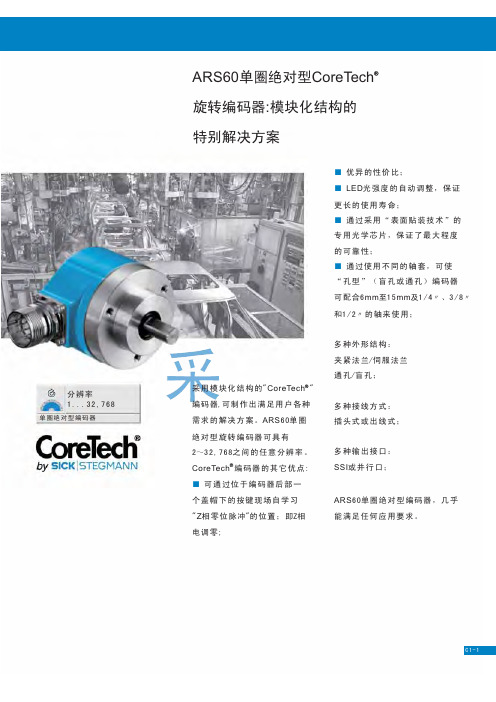
单圈绝ch 旋转编码器:模块化结构的 特别解决方案
■ 优异的性价比; ■ LED光 强 度 的 自 动 调 整 , 保 证 更长的使用寿命; ■ 通过采用“表面贴装技术”的 专用光学芯片,保证了最大程度 的可靠性; ■ 通过使用不同的轴套,可使 “孔型”(盲孔或通孔)编码器 可 配 合6mm至1 5mm及1/ 4〃 、3 / 8〃 和1/2〃 的 轴 来 使 用 ;
绝对值角度编码器

绝对值角度编码器1. 概述绝对值角度编码器是一种用来测量旋转角度的传感器。
与传统的相对值角度编码器不同,绝对值角度编码器可以在任意时刻给出准确的角度值,而不需要通过与初始位置的比较来计算角度增量。
这使得绝对值角度编码器在需要精确控制旋转角度的应用中具有重要作用。
2. 工作原理绝对值角度编码器通常基于光学或磁性原理来测量旋转角度。
光学编码器使用光源和光传感器的组合来测量旋转角度,而磁性编码器则使用磁场和磁传感器来实现。
光学编码器中,光源会照射在旋转的编码盘上,编码盘上的刻纹会导致光的反射或遮挡,从而产生脉冲信号。
通过计算脉冲的数量和位置,可以确定旋转角度。
磁性编码器则利用旋转磁场产生的磁感应强度变化来测量角度。
通常会使用一个定位磁极和一个检测磁极,在旋转过程中,检测磁极会感受到磁场的变化,从而输出相应的角度信息。
3. 类型绝对值角度编码器可以根据不同的工作原理和使用场景分为多种类型。
常见的绝对值角度编码器类型包括:3.1 光学编码器光学编码器以光学原理为基础,通过光源和光传感器来测量旋转角度。
光学编码器具有精度高、分辨率高的特点,适用于对角度测量要求较高的应用,如机器人、自动化设备等。
3.2 磁性编码器磁性编码器使用磁场和磁传感器来测量旋转角度。
磁性编码器具有抗干扰能力强、耐高温等特点,适用于工作环境复杂、对耐久性要求较高的应用,如汽车、航空航天等。
3.3 电容式编码器电容式编码器是一种基于电容原理的角度测量设备。
通过测量电容变化来获得旋转角度信息。
电容式编码器具有体积小、功耗低等特点,适用于小型设备和电池供电的场景。
3.4 磁致伸缩编码器磁致伸缩编码器通过磁致伸缩效应来测量旋转角度。
当施加外部磁场时,编码器材料会发生伸缩,通过测量伸缩量来得到旋转角度信息。
磁致伸缩编码器具有高灵敏度、高分辨率的特点,适用于精密测量和调整控制等场景。
4. 应用领域绝对值角度编码器在许多领域中都发挥着重要作用。
以下是几个常见应用的例子:4.1 机器人控制在机器人控制领域,绝对值角度编码器可以用于测量关节角度,从而实现对机器人的精确控制。
德国TR产品介绍
16 ... 27 mm ≥ 2,8 * 1010 ≤ 3.000 转/分 ≤ 60°C
≤ 104 rad/s2
67 * 10-6 kg m2
0,7 kg
SSI
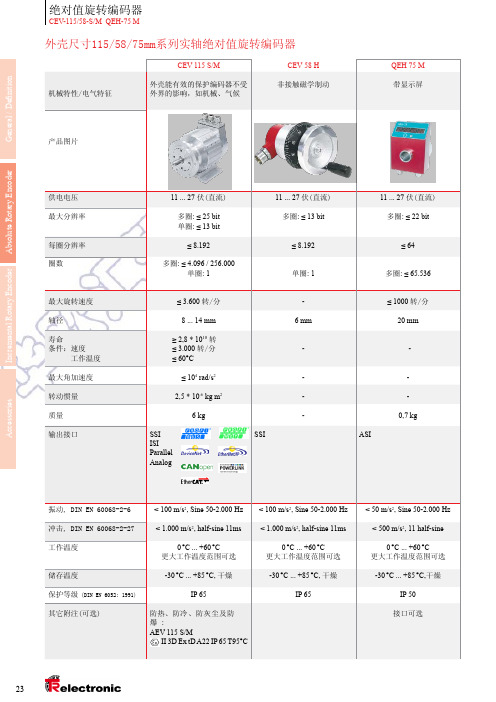
11 ... 27 伏(直流)
多圈: ≤ 25 bit 单圈: ≤ 13 bit
≤ 8.192
多圈: ≤ 4.096 / 256.000 单圈: 1
冲击, DIN EN 60068-2-27
< 1.000 m/s2, half-sine
< 1.000 m/s2, half-sine
工作温度
0 °C ... +60 °C 更大工作温度范围可选
0 °C ... +60 °C 更大工作温度范围可选
储存温度
-30 °C ... +85 °C, 干燥
-30 °C ... +85 °C, 干燥
Incremental Rotary Encoder Absolute Rotary Encoder
绝对值旋转编码器
C_H-80-S/M QEH-80-S/M
外壳尺寸80mm系列空心轴轴绝对值旋转编码器
机械特性/电气特征
CEH 80 S/M
多种接口,空心轴尺寸大于 16mm
COH 80 S/M 高分辨率和精度
≤ 2.048 (4.096 optional)
多圈: ≤ 4.096 单圈: 1
≤ 6.000 转/分
8 ... 12 mm
≥ 3,9 * 1010 转 ≤ 6.000 转/分 ≤ 60°C
≤ 104 rad/s2
2,5 * 10-6 kg m2
0,3 kg ... 0,5 kg
欧姆龙绝对编码器
001 1001
20
01010001111006
010 0000
21
01010101111107
010 0001
22
01011001110108
010 0010
23
01011101110009
010 0011
24
01100001010010
010 0100
25
01100101010111
010 0101
13
01101 001011
001 0011
14
01110 00100100
001 0100
15
01111 00100001
001 0101
16
10000 01100002
001 0110
17
10001 01100103
<0010111
18
01001001101104
001 1000
19
01001101101005
轴的旋转启动转矩
驱动源的转矩为多少?
输出电路方式
选择电路方式时应考虑到连接的后段机器、信号的频率、传送距离、干扰环境等。 长距离传送的情况下,选择线路驱动器输出。
术语解说
分辨 率 轴旋转 1 次时输出的增量信号脉冲数或绝对值的绝对位置数。 输出 相 增量型式的输出信号数。包括 1 相型(A 相)、2 相型(A 相、B 相)、3 相(A 相、B 相、Z 相)。 Z 相输出 1 次即输出 1 次原点用的信号。 输出 相位差 轴旋转时,将 A 相、B 相各信号相互间上升或下降中的时间偏移量与信号 1 周期时间的比,或者用 电气角表示信号 1 周期为 360°。 A 相、B 相用电气角表示为 90°的相位差。
绝对值编码器的工作原理
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转位置的装置,它能够提供非常准确的位置信息。
在本文中,我们将详细介绍绝对值编码器的工作原理及其应用。
一、绝对值编码器的基本原理绝对值编码器通过在旋转轴上安装光电传感器和编码盘来测量旋转位置。
编码盘上通常有两个光电传感器,分别称为A相和B相。
这些光电传感器能够检测到编码盘上的光学标记,从而确定旋转位置。
编码盘上的光学标记通常是一系列等距离的刻线或孔洞。
当旋转轴转动时,光电传感器会根据光学标记的变化产生相应的电信号。
A相和B相的电信号之间存在90度的相位差,通过检测这两个信号的变化,可以确定旋转轴的位置。
二、绝对值编码器的工作原理绝对值编码器的工作原理可以分为两个阶段:初始化阶段和测量阶段。
1. 初始化阶段:在初始化阶段,编码器会通过一个特殊的位置来确定旋转轴的起始位置。
这个特殊的位置通常被称为“零位”,它可以是编码盘上的一个特殊标记或一个特定的位置。
当绝对值编码器上电时,它会自动进行初始化过程。
在这个过程中,编码器会将旋转轴转动到零位,然后记录下当前的位置信息。
这个位置信息将作为参考点,用于后续的测量。
2. 测量阶段:在测量阶段,绝对值编码器会不断地检测旋转轴的位置,并将其转化为数字信号输出。
通过解码这些数字信号,我们可以准确地得到旋转轴的位置。
绝对值编码器的输出通常是一个二进制码,它可以表示旋转轴的绝对位置。
这个二进制码可以通过解码器进行解码,得到一个具体的位置值。
三、绝对值编码器的应用绝对值编码器广泛应用于各种领域,包括机械工程、自动化控制、机器人技术等。
它们在这些领域中起着至关重要的作用。
1. 机械工程:在机械工程中,绝对值编码器常用于测量机械设备的旋转位置。
例如,它们可以用于测量机床的刀具位置,以确保切削过程的精度和稳定性。
2. 自动化控制:在自动化控制系统中,绝对值编码器被广泛用于反馈控制。
通过测量旋转位置,控制系统可以实时监测设备的运动状态,并作出相应的控制动作。
绝对值编码器的工作原理
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转运动的装置,它能够提供旋转角度的准确和绝对位置信息。
在工业自动化、机械加工、机器人等领域中广泛应用。
本文将详细介绍绝对值编码器的工作原理和其组成部份。
一、绝对值编码器的定义和分类绝对值编码器是一种能够提供绝对位置信息的旋转角度传感器。
它与增量式编码器相比,具有不需要复位的优势,能够在断电后保持位置信息。
根据工作原理的不同,绝对值编码器可以分为光学式绝对值编码器和磁性绝对值编码器两种类型。
二、光学式绝对值编码器的工作原理光学式绝对值编码器是利用光电传感器和光栅盘来实现位置信息的测量。
光栅盘上有许多等距的透明条纹和不透明条纹,当光栅盘随着旋转运动时,光电传感器会检测到透明和不透明的条纹,从而产生脉冲信号。
通过统计脉冲信号的数量和顺序,可以确定旋转角度和绝对位置。
三、磁性绝对值编码器的工作原理磁性绝对值编码器利用磁场传感器和磁性盘来测量位置信息。
磁性盘上有许多等距的磁性区域和非磁性区域,当磁性盘随着旋转运动时,磁场传感器会检测到磁性和非磁性的区域,从而产生脉冲信号。
通过统计脉冲信号的数量和顺序,可以确定旋转角度和绝对位置。
四、绝对值编码器的组成部份1. 光电传感器或者磁场传感器:用于检测光栅盘或者磁性盘上的透明和不透明区域,产生脉冲信号。
2. 光栅盘或者磁性盘:光栅盘上有透明和不透明的条纹,磁性盘上有磁性和非磁性的区域,用于产生脉冲信号。
3. 信号处理电路:用于接收和处理传感器产生的脉冲信号,将其转换为数字信号。
4. 解码器:用于将数字信号转换为二进制码或者其他形式的编码,以表示旋转角度和绝对位置。
5. 输出接口:用于将编码结果输出给其他设备或者系统,以实现位置控制或者监测。
五、绝对值编码器的优势和应用1. 不需要复位:绝对值编码器在断电后可以保持位置信息,无需复位,可以减少系统启动时间。
2. 高精度:绝对值编码器可以提供高精度的位置信息,满足精密控制和测量的需求。
绝对式旋转编码器位移计算公式

绝对式旋转编码器位移计算公式一、概述绝对式旋转编码器是一种高精度、高可靠性的传感器,广泛应用于机器人、自动化设备、机床等领域。
其输出信号为数字脉冲,通过计算脉冲数可以得出旋转角度,进而计算出物体的位移。
位移计算是绝对式旋转编码器的一个重要应用领域,本文将介绍一种常用的位移计算公式。
二、基本原理绝对式旋转编码器通过码盘上的光检测器来检测旋转角度,输出脉冲信号。
其工作原理是利用光的反射和电信号的转换。
码盘旋转时,光检测器会接收到反射的光线并转换成电信号,通过分析脉冲信号就可以确定码盘的旋转角度。
三、位移计算公式位移计算公式通常如下:位移=转速×时间×每个脉冲代表的度数/脉冲周期其中,位移表示物体的位移量,转速表示旋转编码器的转速,时间表示物体的运动时间,每个脉冲代表的度数表示每转一圈有多少个脉冲,脉冲周期表示一个脉冲信号的周期。
这个公式考虑了旋转编码器的转速、码盘上的光检测器数量、每个脉冲代表的度数以及物体的运动速度等因素,可以较为准确地计算物体的位移量。
需要注意的是,这个公式是基于理想状态下的计算公式,实际应用中可能存在误差,如温度变化、机械振动等。
因此,在实际应用中需要根据具体情况进行修正或采用更精确的计算方法。
四、应用示例假设有一台绝对式旋转编码器,其转速为1000转/分钟,码盘上有100个光检测器,每个脉冲代表0.01度。
现有一物体在该编码器带动下以1米/秒的速度移动,经过1秒后物体的位移量为:位移=1000×1×100/(2×60×60)=9.76毫米这个数值与物体在经过1秒后实际移动的距离基本一致,说明该位移计算公式可以较为准确地计算物体的位移量。
五、总结本文介绍了绝对式旋转编码器的基本原理和位移计算公式。
通过该公式,我们可以较为准确地计算物体的位移量。
在实际应用中,需要注意误差来源并进行修正或采用更精确的计算方法。
通过正确使用绝对式旋转编码器,可以提高设备的自动化程度和精度,从而提高生产效率和产品质量。
ACURO旋转编码器

闸门旋转编码器技术资料一、ACURO 绝对值编码器技术参数电气机械电源电压10~30VDC 或 5VDC -5%~+10% 外壳直径(单位mm ) Φ58固有消耗电流 单圈/多圈 50mA/100mA/ 250mA(总线型)长度(不含轴,单位mm )总线型长度(单位mm ) 夹紧法兰54.5、同步发兰50.5、 轴套型54.3夹紧法兰81.3、同步发兰76.3 轴套型79.2输出接口 总线型串行SSI 、BiSS ,并行输出(单圈) Profibus DP 、DeviceNet 、CAN L2、CANopen 、Interbus输出代码格雷码或二进制码轴直径x 轴长度(单位mm ) 夹紧法兰Φ10x19.5同步法兰Φ6x10 空心轴套Φ12x18~20 空心轴套Φ10x15~20单圈分辨率(ST ) 10、12、13位、14位、17位 多圈分辨率(MT ) 每圈13位8192线、 连续圈数12位4096圈 附加增量信号(可选) 正弦-余弦A 、B 双相,1Vpp 2048线 最高转速连续工作10000转/分钟 短期运行12000转/分钟 准确度(绝对性/重复性) ±35″/ ±7″启动转矩/转动惯量 ≤0.01N / 3.8x10-6kgm ² 参数化可ACURO soft 软件设置分辨率、方向,警告、报警,预置位开关抗冲击 1000m/s ²(6ms),等于100g 抗振动100m/s ²(10-2000Hz),等于10g 状态LED 绿色=正常,红色=报警 允许轴向窜动/径向跳动 ±1.5mm / ±0.2mm 工作温度℃ -40~100 / -40~85(总线型) 最大轴负荷φ6轴向60N 径向110 N φ10轴向107N 径向160N防护等级IP67(外壳) / IP64或IP67(轴封)二、ACURO 绝对值编码器型号型号 AC58GP/ 1213 E K.42 SG B分辨率电源电压 法兰、防护、轴直径φ 输出接口 电气连接 0010 10位单圈 0012 12位单圈 0013 13位单圈 0014 14位单圈 0017 17位单圈1213 12位多圈+13位单圈 A =5VdcE =10~30Vdc S.41 同步 IP64 6mm S.71 同步 IP67 6mmK.42夹紧 IP64 10mm K.72夹紧 IP67 10mm F.42 轴套 IP64 10mm F.47 轴套 IP64 12mmSG= SSI 格雷码 SB 串行二进制 PB 并行二进制 PG 并行格雷码BI Biss(digital) DP Profibus DP VD DeviceNet CL CAN L2 OL CANopen I2 Interbus K2 I3 Interbus K3A =轴向电缆B =径向电缆C =Conin 12极,轴向顺时针D =Conin 12 极,径向顺时针 G =Conin 12极,轴向逆时针 H =Conin 12 极,径向逆时针 7=M12,8极,轴向 8=M12,8极,径向Z =总线罩壳,3个电缆密封套 T =总线罩壳,4极M12插头(用于tico 显示器)+2个电缆密封套注:选件:小型“tico”显示器,产品编号0 731 205诊断套件:230V AC 电源,用于带总线罩壳(T 型)的编码器, 包括ACURO soft 和“tico ”显示器,产品编号 1 565 070三、洋口电站编码器引线编号注:1、方向线不接时,编码往增方向。
ATM60-90系列绝对值旋转编码器选型手册(中文版)

1030006 1030007 1030008
动
角度分辨率
0.043°
控
测量误差 重复精度
± 0.25° 0.1°
制
输出接口
SSI,RS422
传
输出码
格雷 码/二 进 制码
感
编码方向
顺时 针/逆 时 针
器
定位时间
0.15ms
接口信号 Clock+,Clock-,Data+,Data-8)
用 于SSI通 讯 模 式 : 最 大 时钟
频 率1MHz; 也 就 是 说 , 时 钟
分ቤተ መጻሕፍቲ ባይዱ率 高达26位
多圈绝对型旋转编码器
ATM60/ATM90: 多圈绝对型旋转编码器 结构坚固,性能可靠
多种接线方式: 插头式,接线端子式
多种输出接口: SSI,Profibus,CANopen和 DeviceNet等;可以满足不 同应用场合的需求。
旋转编码器提供了SSI输出接口 或者RS422参数配置接口也可作为 标准输出接口,并提供连接到
1)在这种 情 况下,用 户将轴封去掉 2)参照DIN IEC 68,2-27部 分 3)参照DIN IEC 68,2-6部分 4)在编 码 器 上 无密封 圈 5)在编 码 器 上 有密封 圈
订货资料
ATM60夹 紧 法 兰 ; 6mm轴 径 ; 电 源 电 压US 10...32V;SSI输 出 接 口/ RS422输出 接 口 1 出 厂 设 置 :4,096脉 冲/圈x 4,096圈 , 格 雷 码 , 电 调 节 信 号"Set”=0
596 运动控制传感器
1 R=最 小 弯 曲 半 径40mm
针脚号
1 2 3 4 5 6 7 8 9 10 11 12
绝对式旋转编码器
绝对式编码器以某一点为参考原点,数据线始终输出编码器轴的当前位置偏离原点的距离的数据信息,是称绝对式编码器。
比如,一款10位BCD码输出的编码器分辨率为360C/T,那么每个单位对应1°,如果轴偏离原点一个单位,也就是处在1°的位置,那么输出00 0000 0001,如果偏离50°,也就是在50°的位置,那么输出就是00 0101 0000。
绝对式编码器总是输出当前位置信息。
由于这样的特点,绝对式编码器非常适合应用在跑轨迹的场合。
多摩川绝对式编码器型号齐全,从输出信号的编码方式来分类的话,有BCD码、GRAY码和纯2进制码(PB)输出;从输出方式来划分的话并行输出和串行输出;从分辨率来划分的话有从8位到36位不等。
用户可以根据自己的需要进行选择。
此外绝对式编码器还有单回转和多回转之分,多回转计圈数而单回转不计圈数,多摩川绝对式编码器单回转最多可以作到20位,多回转16位。
输出信号采用串行传送,经专用芯片转换后变为并行输出信号,可以直接送给DSP、MCU、FPGA等进行处理。
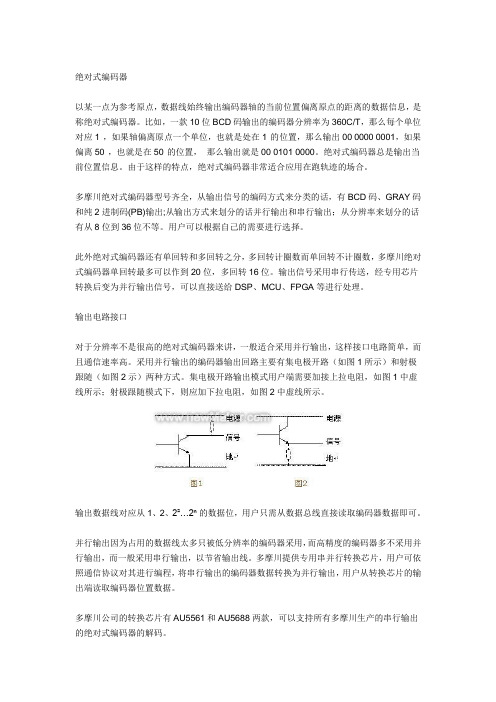
输出电路接口对于分辨率不是很高的绝对式编码器来讲,一般适合采用并行输出,这样接口电路简单,而且通信速率高。
采用并行输出的编码器输出回路主要有集电极开路(如图1所示)和射极跟随(如图2示)两种方式。
集电极开路输出模式用户端需要加接上拉电阻,如图1中虚线所示;射极跟随模式下,则应加下拉电阻,如图2中虚线所示。
输出数据线对应从1、2、2²…2ⁿ的数据位,用户只需从数据总线直接读取编码器数据即可。
并行输出因为占用的数据线太多只被低分辨率的编码器采用,而高精度的编码器多不采用并行输出,而一般采用串行输出,以节省输出线。
多摩川提供专用串并行转换芯片,用户可依照通信协议对其进行编程,将串行输出的编码器数据转换为并行输出,用户从转换芯片的输出端读取编码器位置数据。
多摩川公司的转换芯片有AU5561和AU5688两款,可以支持所有多摩川生产的串行输出的绝对式编码器的解码。
旋转编码器的工作原理

旋转编码器的工作原理旋转编码器是一种用于测量旋转角度和位置的装置,通常应用于控制和调节设备、机器人、工业自动化等领域中。
理解旋转编码器旋转编码器主要由两个部分组成:转轴和编码器。
其中,转轴用于连接旋转物体和编码器,将旋转物体的旋转角度转换为电信号,而编码器则用于将旋转信息转换为数字量供处理器使用。
旋转编码器有两种类型,分别是绝对编码器和增量编码器。
绝对编码器可直接提供转轴绝对位置信息,而增量编码器则记录转轴相对运动,常用于自动控制系统中。
绝对编码器的工作原理绝对编码器是利用光电传感器的原理来测量旋转角度,该设备可以快速、准确地测量转轴的绝对位置。
绝对编码器工作原理如下:1.光电阵列:由多个光电元件组成的一个条形阵列,通常放置在旋转轴上方,与旋转圆盘接触并沿圆弧分布,并与某一静态光源(LED)或一组磁钢对置,产生脉冲信号。
2.光栅盘:由透明和不透明区域组成的圆形盘片,将光电阵列传感器投射的光圈分成相等的部分。
不同的盘片上的不透明线条的数量和排列方式不同,可以确定每个角度位置的信息。
3.信号处理器:测量输入信号,将输出转换为数字信号,更准确的反映被测量对象旋转角度的细节。
将光电传感器采集的埋入光栅中的光线变化转换为电子信号,然后将其转化为数字信号进行计算。
绝对编码器可以直接提供转轴绝对位置信息,其输出的信号数目介于10到14之间。
此外,绝对编码器的另一重要特点是旋转时无法造成误差积累。
这使得它们被广泛使用在需要高精度位置和角度控制的应用中。
增量编码器的工作原理增量编码器是通过记录转轴相对运动次数,来测量旋转角度和位置的。
增量编码器的工作原理如下:1.轴承和旋转轮:增量编码器通常由一对轴承和黄色的旋转轮组成,旋转轮固定在旋转物体轴上,然后与编码器相连。
2.光电传感器:在传感器的两端安装一个发射和接收光线的红外传感器,以便捕捉旋转轴的转动。
在旋转轮上,以灰度值不同的标记装饰,当旋转轮与光电传感器通过时,传感器会读取标记的状态。
绝对式旋转编码器工作原理

总线型编码器可以节省连接线缆、接收设备接口,传输距离远,在多个 编码器集中控制的情况下还可以大大节省成本。 4.变送一体型输出
变送也就是其信号已经在编码器内换算后直接变送输出,其有模拟量 4—20mA 输出、RS485 数字输出、14 位并行输出等。 绝对式编码器选型常用参数
1.单圈绝对型(Singleturn)-需知道客户所需求的位数,又叫解析度 (Resolution),比如 10 bits ,又称 1024 positions,12bits =4096 positions 等。 2.多圈绝对型(Multiturn)-此时除了问他单圈的解析度外,还有就是 他所需求的圈数(revolution),所以一个多圈型编码器的位数是单圈 位数和多圈圈数的总合。比如:一个编码器的单圈解析度为 4096/12bits , 圈数为 13bits,那么这个编码器的总输出位数就是 12+13=25bits . 3.信号输出及接口形式(Signal and Output)-首先有数码输出和模拟 输出,但一般是以数码为主。编码输出有:并行输出,串行输出,总线 接口等。 4.编码器电源电压(Power)-问清楚他所选用编码器的工作电源电压。 5.输出码制(Code)-绝对式编码器输出之编码同计算机中所用到的码 制是一样的,也有自然二进制,BCD,格雷码,余格雷码等。其中常用
的也就是自然二进制(natural binary code),格雷码(gray code),因 为格雷码有优于自然二进制的特点,故一般采用格雷码为多。 6.编码器温度范围(Temparature Range)-此相应客户的具体要求而 帮对方选择之。此又分使用温度和存放温度。 7.编码器转速范围(Speed)-此相亦需满足客户的具体要求,一般良 好之编码器的机械转速可达到 5000~6000rpm. 8.IP 防护等级(Protection)-此防护等级又分为外盖防护等级和轴径 处的防护等级。其以 IP67 为最高级别。
AFS-AFM60-EtherNet-IP绝对值旋转编码器选型手册(中文版)

AFS60/AFM60 绝对值型编码器EtherNet/IP 接口智能、强大、精准德国西克传感器产品简介目前,市场的发展趋势正日益朝向基于工业以太网的现场总线系统。
快速以太网、双端口交换机、全双工传输等技术发展,已将以太网变成了一个强大的通信系统。
基于工业以太网的现场总线系统优势明显,已成为未来工厂自动化、物流自动化与过程自动化的标准配置。
A F S60/A F M60绝对值型编码器,E t h e r N e t/I P接口|S I C K2• 优化了位置、速度、温度、工作时间等系统参数的最大与最小值范围,最大程度地提升了系统可用性• 采用光学原理的18位单圈分辨率或30位多圈总分辨率,实现了精确定位与最佳的转换效果• 配置5个双色LED 状态指示灯,实现了直观、可视的安全监控• 循环轴功能(带非二进制及小数值分辨率选项),节省了安装成本SICK 单圈、多圈绝对值型编码器AFS60/AFM60 自推出后广受市场欢迎;作为市场发展趋势的引领者,SICK 新近又在这两款产品上新增了3个时下最流行的以太网协议:PROFINET 、 EtherCAT 与EtherNet/IP 。
这两款产品因此而拥有更多、更强大的诊断功能,性能也更出色:全部三种型号均有夹紧法兰、伺服法兰及盲孔轴三种机械接口可选,同时配备通用转矩支架、联轴器、安装罩及多种类型的插头等等附件,适用于几乎所有应用。
A F S 60/A F M 60绝对值型编码器,E t h e r N e t /I P 接口 | S I C K 3“设备级环网”AFS60/AFM60,EtherNet/IP 接口AFS60/AFM60 EtherNet/IP接口绝对值型编码器的设备级环网(DRL)功能是该系列产品的一大显著特性。
DRL是一种革命性的环网拓扑技术,使用该技术后无需再使用交换机。
同时,此款编码器还实现了编码器至编码器的直接布线。
与星型网络拓扑相比,节省了布线所需的人力与成本。
布瑞特单圈绝对值旋转编码器 RS485 用户手册说明书

布瑞特单圈绝对值旋转编码器RS485产品说明书深圳布瑞特科技有限公司ShenZhen Briter Technology Co.Ltd产品优势特性●RS485数字通讯信号输出,数字输出信号既有多圈值、单圈绝对值;●采用标准的ModBus-RTU通讯规约,支持组态王、Intouch、FIX、synall 等流行软件,能与AB、西门子、施耐德、GE等国际著名品牌的设备及系统之间实现数据通信;●单圈编码器在不掉电情况下可作电子多圈编码器使用(此功能非断电记忆),最高可达百万圈;增加返回速度功能,便于使用者计算;●单圈量程范围内任何位置都是唯一的,即使有干扰或断电运动,都不会丢失位置信息;●单圈分辨率有1024(10bit)、4096(12bit)、16384(14bit)、32768(15 bit),量程范围内最高可实现0.01度的分辨率;●所有参数均可通过电脑的RS485通讯进行设定,可在任意位置设定零点,因此安装编码器时可将设备停留任意位置,无需考虑本编码器的旋转位置、即可固定好连接轴,通电后只要在外部引线处或通过RS485通讯进行一次置零操作即可自动修正;●特别适用于塔式起重机、矿山起重机、施工升降机、机床、3D打印机、自动化流水线、工业机器人、印刷机械、包装机械、物流机械、移动广告屏幕滑轨等设备的高度、行程、角度及速度的可靠/精确测量。
产品型号说明型号:RS485接口--3D 模型以及相关资料请到布瑞特科技官网下载。
尺寸型号图1:输出6mm IP54尺寸型号图2:输出轴8mm IP54机械尺寸线出口方向与3个M3安装孔的角度关系是随机的D 字型轴尺寸比例5:1螺纹孔深6mm尺寸型号图3:盲孔8mm IP54尺寸型号图4:输出6mm IP67尺寸型号图5:输出8mm IP67注意事项●编码器属于精密仪器,请轻拿轻放、小心使用,尤其对编码器轴请勿敲、撞击及硬拽等。
●编码器与机械连接应选用柔性连接器或弹性支架,应避免刚性联接不同心造成的硬性损坏。
旋转编码器工作原理 __编码器
旋转编码器工作原理 __编码器旋转编码器工作原理旋转编码器是一种用于测量旋转运动的传感器,它将旋转运动转化为数字信号输出。
旋转编码器通常由一个旋转部件和一个固定部件组成。
旋转部件通常是一个旋转轴,固定部件则是一个固定在机器或设备上的传感器。
旋转编码器可以分为两种类型:绝对编码器和增量编码器。
1. 绝对编码器:绝对编码器可以直接读取旋转轴的位置,无需进行旋转运动的累积计数。
它可以提供非常精确的位置信息,并且在断电或重新启动后仍能保持位置数据。
绝对编码器通常使用光电或磁性传感器来检测旋转轴的位置。
它们通常具有多个输出通道,每个通道对应一个位置。
通过读取输出通道的状态,可以确定旋转轴的准确位置。
2. 增量编码器:增量编码器测量旋转轴的相对位置变化。
它们通常具有两个输出通道,一个用于测量旋转方向,另一个用于测量旋转的步数或脉冲数。
增量编码器的工作原理基于光电或磁性传感器检测旋转轴上的刻度盘或编码盘上的孔或凸起。
当旋转轴旋转时,传感器会检测到刻度盘上的孔或凸起的变化,并将其转化为电信号输出。
通过计数脉冲数和检测旋转方向,可以确定旋转轴的相对位置变化。
旋转编码器的工作原理基于光电或磁性传感器的检测和信号处理。
光电传感器通常使用光源和光敏元件(如光电二极管或光敏电阻)来检测刻度盘上的孔或凸起。
当光线照射到光敏元件上时,它会产生电信号。
当光线被刻度盘上的孔或凸起遮挡时,光敏元件的电信号会发生变化。
这种变化被转化为数字信号输出,并用于确定旋转轴的位置。
磁性传感器通常使用磁性刻度盘和霍尔传感器来检测旋转轴的位置。
磁性刻度盘上通常有一些磁性极性,当旋转轴旋转时,磁性极性会改变霍尔传感器的输出。
这种输出被转化为数字信号,并用于确定旋转轴的位置。
旋转编码器通常具有高分辨率和高精度,可以用于各种应用,如机械设备、工业自动化、机器人、电子设备等。
它们可以提供精确的位置反馈,帮助控制系统实现准确的位置控制和运动控制。
总结:旋转编码器是一种用于测量旋转运动的传感器,可以将旋转运动转化为数字信号输出。
绝对值多圈编码器概述

绝对值多圈编码器概述
编码器的工作原理基于磁性固定盘和传感器单元之间的磁场交互作用。
磁性固定盘上通常具有多个磁极,通过旋转磁性固定盘,传感器单元可以
测量到磁场的变化。
传感器单元通常由一对磁敏元件组成,如霍尔元件或
磁电阻元件。
这些磁敏元件可以测量到磁场的强度和方向,并将其转换为
电信号。
绝对值多圈编码器具有高精度、高分辨率和高重复性的优点。
它们可
以在广泛的应用领域中使用,如工业自动化、机器人技术、航空航天和医
疗设备等。
由于其直接测量旋转位置的能力,绝对值多圈编码器在需要准
确和可靠的位置反馈的应用中非常重要。
在选择绝对值多圈编码器时,需要考虑几个关键因素。
首先是分辨率,即编码器能够检测到的最小旋转位置的变化。
分辨率越高,编码器对位置
的测量越精确。
其次是准确性和重复性,编码器应能够以高精度和一致性
地测量位置。
此外,耐用性和可靠性也是重要的考虑因素,编码器需要能
够承受恶劣的环境条件和长时间的使用。
总之,绝对值多圈编码器是一种用于测量旋转角度或位置的高精度传
感器。
它们通过直接测量旋转位置的绝对值,而不需要计数器或计时器来
确定位置。
绝对值多圈编码器具有高分辨率、高准确性和高重复性的优点,并在工业和科技领域中得到广泛应用。
选择适合的编码器时,需考虑分辨率、准确性、重复性、耐用性和可靠性等关键因素。
绝对值编码器的工作原理
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转角度的装置,它能够提供准确的位置信息。
它的工作原理基于光电效应和数字编码技术。
下面将详细介绍绝对值编码器的工作原理。
1. 光电效应光电效应是指当光照射到物质表面时,光子能量被物质中的电子吸收,使电子跃迁到更高能级,从而产生电荷。
绝对值编码器利用光电效应来检测旋转角度。
2. 光电传感器绝对值编码器中使用了光电传感器,它通常由发光二极管(LED)和光敏二极管(光电二极管或者光敏电阻)组成。
LED发出光束,光敏二极管接收到光束后产生电信号。
3. 编码盘绝对值编码器中的编码盘是一个圆盘状的装置,上面刻有一系列的刻线或者孔。
编码盘通常由透明材料制成,光可以穿过它。
4. 编码规则绝对值编码器使用不同的编码规则来确定旋转角度。
常见的编码规则有格雷码和二进制码。
- 格雷码:格雷码是一种二进制编码,相邻的码之间惟独一个位数发生变化。
这种编码方式可以避免由于误差引起的不许确测量。
- 二进制码:二进制码是一种基本的数字编码方式,它使用0和1来表示不同的状态。
5. 工作原理绝对值编码器的工作原理如下:- 当旋转角度发生变化时,编码盘上的刻线或者孔会遮挡或者透过光线,使得光敏二极管接收到的光强发生变化。
- 光敏二极管产生的电信号经过放大和处理后,转换为数字信号。
- 根据编码规则,将数字信号转换为对应的角度值。
- 绝对值编码器可以通过多个光电传感器和编码盘来实现更高的精度和分辨率。
6. 应用领域绝对值编码器广泛应用于需要准确测量旋转角度的领域,例如:- 机械加工和控制系统:用于测量机床、机器人和自动化设备的转动角度,实现精确的位置控制。
- 汽车工业:用于车辆的转向系统、发动机和传动系统,提供准确的角度信息。
- 航空航天工业:用于飞机、导弹和卫星等航空航天器的导航和控制系统。
- 医疗设备:用于医疗器械的位置测量和控制,如手术机器人和影像设备。
- 电子设备:用于摄像机云台、游戏手柄和电子仪器等设备的位置检测。
绝对编码器与增量编码器的区别
绝对编码器与增量编码器的区别文件编码(GHTU-UITID-GGBKT-POIU-WUUI-8968)一、光电编码器:光电编码器是集光、机、电技术于一体的数字化传感器,可以高精度测量被测物的转角或直线位移量。
增量式旋转编码器定义:用光信号扫描分度盘(分度盘与转动轴相联),通过检测、统计信号的通断数量来计算旋转角度增量式旋转编码器的特点:1)编码器每转动一个预先设定的角度将输出一个脉冲信号,通过统计脉冲信号的数量来计算旋转的角度,因此编码器输出的位置数据是相对的;2)由于采用固定脉冲信号,因此旋转角度的起始位可以任意设定;3)由于采用相对编码,因此掉电后旋转角度数据会丢失需要重新复位。
增量式编码器综述特点:数字编码,根据旋转角度输出脉冲信号;根据旋转脉冲数量可以转换为速度选型:-旋转一周对应的脉冲数(256,512,1024,2048);输出信号类型(TTL,HTL,push-pullmode);电压类型(5V,24V);最大分辨速度优点:分辨能力强;测量范围大;适应大多数情况缺点:断电后丢失位置信号;技术专有,兼容性较差绝对式旋转编码器定义:用光信号扫描分度盘(分度盘与传动轴相联)上的格雷码刻度盘以确定被测物的绝对位置值,然后将检测到的格雷码数据转换为电信号以脉冲的形式输出测量的位移量绝对式旋转编码器的特点:1)在一个检测周期内对不同的角度有不同的格雷码编码,因此编码器输出的位置数据是唯一的;2)因使用机械连接的方式,在掉电时编码器的位置不会改变,上电后立即可以取得当前位置数据;3)检测到的数据为格雷码,因此不存在模拟量信号的检测误差;绝对式编码器综述特点:数字编码,根据旋转角度输出脉冲信号;根据输出的脉冲信号可以转化为速度.选型:单编码盘/多编码盘(测量一个或二个旋转变量);代码(格雷码,BCD码,二进制码)信号传输方式(并口,串口);分辨率;最大旋转速度优点:1)结构简单2)角行程编码(通过旋转轴获得)3)线性编码(激光远距离测量)4)掉电不影响编码数据的获得5)最大24位编码缺点:比较贵混合式旋转编码器定义:用光信号扫描分度盘(分度盘与转动轴相联),通过检测、统计光信号的通断数量来计算旋转角度,同时输出绝对旋转角度编码与相对旋转角度编码混合式旋转编码器的特点:具备绝对编码器的旋转角度编码的唯一性与增量编码器的应用灵活性。
绝对值编码器的工作原理
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转位置的装置,它能够提供非常准确的位置信息。
本文将详细介绍绝对值编码器的工作原理,包括其基本原理、工作方式和应用领域。
一、基本原理绝对值编码器基于光电效应或磁电效应来测量旋转位置。
其中,光电效应编码器使用光栅来生成光信号,而磁电效应编码器则使用磁栅来生成磁信号。
这些信号会被传感器捕捉并转换为电信号,然后通过解码器进行解码,最终得到准确的位置信息。
二、工作方式1. 光电效应编码器光电效应编码器由光栅和传感器组成。
光栅是由透明和不透明的条纹交替组成的,当光线照射到光栅上时,会产生光电效应,从而生成光信号。
传感器会捕捉这些光信号,并将其转换为电信号。
解码器会对这些电信号进行解码,从而得到旋转位置的准确信息。
2. 磁电效应编码器磁电效应编码器由磁栅和传感器组成。
磁栅是由磁性材料制成的,上面有一系列的磁极。
当旋转物体上的磁头经过磁栅时,会产生磁电效应,从而生成磁信号。
传感器会捕捉这些磁信号,并将其转换为电信号。
解码器会对这些电信号进行解码,从而得到旋转位置的准确信息。
三、应用领域绝对值编码器广泛应用于各种需要测量旋转位置的领域,例如:1. 机床绝对值编码器可以用于测量机床的旋转轴的位置,从而实现高精度的加工。
2. 机器人绝对值编码器可以用于测量机器人的关节旋转位置,从而实现精确的运动控制。
3. 自动化设备绝对值编码器可以用于测量自动化设备的旋转部件位置,从而实现精确的运动控制和位置反馈。
4. 医疗设备绝对值编码器可以用于测量医疗设备中旋转部件的位置,从而实现精确的操作和控制。
总结:绝对值编码器是一种用于测量旋转位置的装置,它基于光电效应或磁电效应来生成信号,并通过解码器解码得到准确的位置信息。
它在机床、机器人、自动化设备和医疗设备等领域有着广泛的应用。
通过使用绝对值编码器,可以实现高精度的位置测量和运动控制,提高设备的性能和精确度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绝对旋转编码器
增量式编码器的缺点是启用或加电时要执行回零操作以确定位置参数的起点,而即使是很短时间的停电也会造成位置信息的丢失。
而绝对式编码器则没有这样的缺点。
绝对编码器的码盘由多个同心的码道(track)组成,这些码道沿径向顺序具有各自不同的二进制权值。
每个码道上按其权值划分为遮光和透光段,分别代表二进制的O和1。
与码道个数相同的光电器件分别与各自对应的码道对准并沿码盘的半径直线排列。
通过这些光电器件的检测可以产生绝对位置的二进制编码。
绝对编码器对于转轴的每个位置均产生唯一的二进制编码,因此可用于确定绝对位置。
绝对位置的分辨率取决于二进制编码的位数亦即码道的个数。
例如一个10码道的编码器可以产生1024个位置,角度的分辨率为21,6”。
目前绝对编码器已可以做到有17个码道。
可以图12.5中的4位绝对码盘来说明旋转绝对编码器的工作原理。
图中左边的码盘采用标准二进制编码,其优点是可以直接用于进行绝对位置的换算。
但是这种码盘在实际中很少采用,因为其在两个位置的边缘交替或来回摆动时,由于码盘制作或光电器件排列的误差常会产生编码数据的大幅度跳动,导致位置显示和控制的失常。
例如在位置0111与1000的交界处,可能会出现1111、1110、1011、0101等数据。
因此绝对编码器一般采用图12.5中右边的又称为格雷码的循环二进制码盘。
格雷编码的特点是相邻两个数据之间只有一位数据的变化,因此在测量过程中不会产生数据大幅度跳动即通常所称的不确定或模糊现象。
格雷码在本质上是一种对二进制的加密处理,其每位不再具有固定的权值,必须经过一个解码过程转换为二进制码,然后才能得到位置信息。
这个解码过程可通过硬件解码器或软件来实现。
格雷码和二进制的关系及其特点可概括如下:
(1)两者的最高有效位相等。
(2)格雷码中除最高位外,其他各位以总数的1/2对称。
(3)两种编码除最高位以外其他各位的关系由下式计算
di=di+1+di'(i=n,n-1,n-2,…,3,2,1)
其中di为二进制编码中某一位的代码,di'为同一位的格雷码代码,而di+l为二进制的高一位代码,+表示不考虑进位的一位加法。
表12.2列出了4位二进制码与格雷码对照表
绝对编码器的优点是即使处于静止或关闭后再打开,均可得到位置信息。
但是其缺点是结构复杂,造价较高。
此外其信号引出线随着分辨率的提高而增多。
例如18位的绝对编码器的输出至少需要19根信号线。
而增量编码器不论分辨率如何,只需要4根信号引出线。
随着集成电路技术的发展,已经有可能将检测机构与信号处理电路、解码电路乃至通信接口组合在一起,形成数字化、智能化或网络化的位置传感器。
例如已有集成化的绝对编码器产品将检测机构与数字处理电路集成在一起,其输出信号线数量减少为只有数根,可以是分辨率为12位的模拟信号,也可以是串行数据。