舰载机纵向自动着舰控制
舰载机着舰指挥引导技术
link appraisement王 鹏中国飞行试验研究院 飞机所王鹏(1988-)男,河南许昌人,工程师,硕士,研究方向为飞机性能品质试飞。
目前各国航母上普遍采用的光学助降系统是菲涅尔透镜光学助降系统。
为了使菲涅尔透镜射出的光束尽量不受母舰摇摆的影响,菲涅尔透镜光学助降系统通常安装于航母斜角甲板中部的左舷。
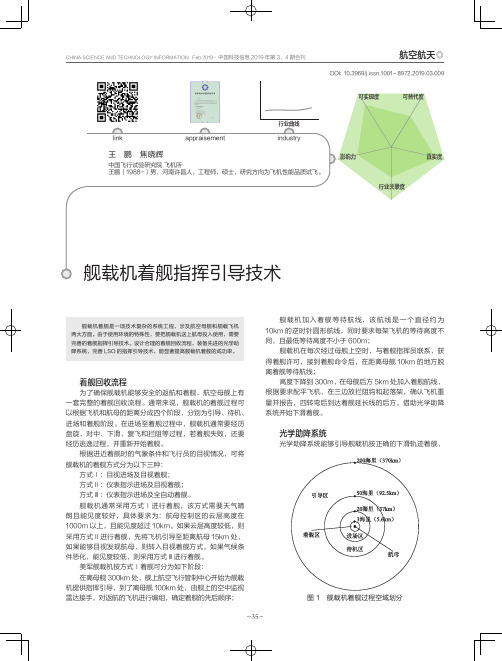
菲涅尔透镜光学助降系统由5个灯室上下叠成一起组成,每个灯室内有3只灯泡产生光源,并通过菲涅尔透镜和其前方的柱状透镜形成0.34°的垂向视场和40°的横向视场,整个5个灯室组成的菲涅尔指示灯可以为飞行员提供垂向1.7°和横向40°的线性光学视场,飞行员在该视场内可以看见一个琥珀色的直线性很好的柱形光束,该光束称为“肉球”。
在舰载机下滑着舰时,飞行员可以通常“肉球”和绿色基准灯判断飞机的位置。
当“肉球”和绿色基淮灯在同一直线上时,飞机在理想下滑轨迹上,只要继续保持就能着舰;到最优迎角;当黄色环形灯亮时,说明飞机速度正好,继续保持。
LSO 指挥引导技术与舰载机着舰安全直接相关。
飞行前,LSO 在与塔台指挥员、飞行员完成沟通协调后,应提前到LSO 平台,完成设备、人员等准备情况的检查。
飞行中,LSO 的指挥应贯穿于整个着舰过程的各个阶段,具体包括:着舰阶段开始后,完成与塔台指挥员的指挥交接;指挥飞行员完成1转弯和2转弯;三边航线时确认飞机状态和侧方计时;提醒飞行员180°转弯时机,并观察飞机在90°位置的高度;根据飞行员看灯情况控制起始点位置;在整个下滑进图2 菲涅尔透镜光学助降系统菲涅尔透镜肉球位置图4 LSO 平台及工作情形。
舰载机纵向自动着舰控制系统设计

Ke rs LQG/ TR to oo y;u o t a dn ;o u te s la iglw ywo d : L meh d lg a tmai ln ig r b sn s ;e dn a c
lwsa d la ig lws Th u o tcln ig c n r ls se lwsweed sg e y LQG/ TR d sg t o oo y a n edn a . ea tmai a dn o to y tm a r ein d b L ein meh d lg .
r b s n s n e o pi g p o e t . Th a e ic s e h e i n o h u o tc l n i g c n r ls s e c n r l o u t e s a d d c u l r p ry n e p p r d s u s s t e d sg f t e a t ma i a d n o to y t m o t o
线 性 二次型 高斯 函数 / 回路 传递 复现 ( QG L /
L TR) 于 分离 定 理 进行 两 个 方 面 的设 计 : 基 状态 观测器 、 以及全状 态反 馈控 制器 。
2 1 观 测 器 设 计 .
窄 ; 体前行 时 , 浪所 造 成 的舰 体 三 自由度偏 舰 海 摆及垂 直起伏 运 动 , 飞机 的预 期 着舰 点变 成三 使
ln ig c n r l y tm o n i dn l o to ws a dn o to se f rl gt ia n r la .Th eut h w ta h o to e in d b h QG/ TR o s o u c l ers l s o h tt ec n r l sg e yt eL s d L ir— s
舰载机着舰过程中甲板运动补偿技术研究

带有舰尾流的舰载机进场动力补偿系统分析

600 270
öæ
֍
øè
s2
+
1 325 29.85s +
1
325
öù
÷ú
øû
(3)
式中:s 为拉普拉斯算子;q0(s) 为输入的拉氏变
换
;q(
s)
为
输
出
的
拉
氏
变
换
;δ e
(
s)
为
操
纵
杆
量
的
拉氏变换。
在 未 加 入 姿 态 飞 行 控 制 系 统 前 ,加 入 单 位 阶
跃输入后得到俯仰角的曲线如图 4 所示。
γ » sin γ =
P cos α mg
-
D mg
-
1 g
×
dV dt
(6)
图 7 所示为飞机阻力随速度变化的曲线。在
由图 4 可以看出,俯仰角无法跟踪输入,俯仰 着舰时,飞机主要工作在阻力曲线的背面区域,即
控制存在不稳定现象。
图 中 最 小 阻 力 的 左 边 区 域(最 小 阻 力 对 应 的 速 度
Kq
滞后超前 滤波器
图 3 纵向增稳控制器结构图 Fig.3 The block diagram of control augmentation system
运 动 方 程 线 性 化 。 利 用 小 扰 动 线 性 化 ,可 建 立 如
根 据 文 献[3]提 供 的 参 数 可 以 建 立 以 上 各 个
Vol.8 No.3 Jun第. 280卷13
带有舰尾流的舰载机进场动力补偿系统分析
钟涛
海军装备部 舰船办公室,北京 100071
摘 要:舰载机发生事故主要是在着舰过程中,其主要原因在于舰载机低速着舰时航迹控制不稳定。为克服这
舰载机着舰控制律

舰载机着舰控制律
舰载机着舰控制律(Aircraft Carrier Landing Control Law)是指在舰载着陆中,为保证舰载机按照预定路径安全着陆,利用飞行控制系统对舰载机姿态、速度进行控制的一种自动化控制系统。
舰载机着舰控制律的主要任务是在通常情况下以尽量少的飞行员干预情况下,使舰载机按照着陆路径精确定位和精确定向,保障舰载飞机安全着陆。
舰载机着舰控制律包括三个环节:导航控制环节,姿态控制环节和机动控制环节。
导航控制环节:导航控制环节是指通过地面雷达跟踪、测距设备测定等手段,确定目标点和航空母舰之间的位置和距离,同时根据给出的飞行计划获得舰载机下一个跟随点的位置,确保舰载机按照预定路径正确着陆。
姿态控制环节:姿态控制环节主要是控制舰载机的姿态,在舰载机接近甲板时,通过姿态飞行控制器以控制舰载机飞行姿态稳定,并保持预定率限制。
机动控制环节:机动控制环节主要是控制舰载机的速度和位置,在着陆时将舰载机放在预定的位置和速度上。
如果舰载机速度过快,需要降低油门以达到安全着陆的要求。
如果舰载机速度过慢,需要增加油门以保证舰载机能够飞行。
为了防止舰载机在着陆过程中出现困难或错误,舰载机着舰控制律需要能够自适应各种情况,并能够提供预警。
此外,舰载机着舰控制律也需要注意天气变化,比如风速、方向、海浪等变化。
总之,舰载机着舰控制律对于舰载飞机的安全着陆和舰载机的稳定飞行起到了至关重要的作用。
在技术趋势不断发展的今天,不断改善和创新舰载机着舰控制律仍然是现代军事装备研究的重要课题之一。
第7章 ACLS

第7章舰载飞机自动着舰导引7.1 舰载机及全天候着舰导引系统舰载飞机问世于第一次世界大战期间,至今已有70余年的发展历史。
进入60年代后,由于武器技术的发展,例如低空高速飞机,反舰导弹,以及高速深潜大航程低噪声潜艇的出现,大型航母与舰载机所构成的武器作战系统加强了空中预警与水下反潜能力,舰载机逐步成为由战斗机、预警机、反潜机、侦察机、加油机、直升机和运输机所构成的机群。
常规舰载机尾部装有专门尾钩,在航母甲板上着舰时,尾钩钩住甲板上的阻拦船索,飞机所具有的动能由与阻拦钢索相连的缓冲器吸收,一般只滑跑几十米就可停下。
为减少停放空间,机翼可折叠。
由于着舰没有拉平段,以 5.3左右下滑角着舰,因此要求有特殊强度的起落架。
以某型如图7-1所示核动力航母为例,满排水量91400吨,长332.4m,宽76.8m,各类飞机90至100架。
动力装置为二台原子能反应堆,总功率为28~32万马力,舰速约33节。
采用斜直两段飞行甲板,其中直通甲板专供弹射起飞。
图7-1 航母甲板配置由于直通甲板长度为80~90m ,而现代飞机需加速到350km/h 后才能起飞,因此多数固定翼飞机都需有蒸汽弹射器,使飞机在60m 左右的距离内加速起飞。
斜角甲板在航母左侧,与舰艇首尾中心线成︒︒13~6夹角,供飞机着舰,其长度约为220m 至270m ,宽27m 至30m ,跑道长度仅为陆基飞机的1/10。
甲板上装有4根拦阻索,每隔约12m 横设一根钢索,高0.5m ,与甲板下的液压阻尼器相连。
着舰时飞机尾钩钩住任意一根,由拦阻索巨大的阻尼力使飞机经60m 左右停下。
另外,若飞机着舰前尾钩不能放下,或燃油耗尽不能复飞等意外情况需迫降时,一般在第三条拦阻索位置处架设拦机网,飞机冲到网上后,连机带网冲出40m~50m 后停下。
采用菲涅尔透镜光学助降系统由助降镜与稳定平台两部分组成。
助降镜装在稳定平台上,以保证镜中所透射的光束不受舰体摇摆的影响。
“艾科尔斯”改进型光学助降系统的纵向着舰精度研究

V_ .9 No 2 0 2 1 .
舰载机自动着舰引导与控制综述

舰载机自动着舰引导与控制综述
张志冰;甄子洋;江驹;薛艺璇
【期刊名称】《南京航空航天大学学报》
【年(卷),期】2018(050)006
【摘要】引导与控制是舰载机自动着舰的关键技术,为此本文对该技术进行综述.给出了舰载机进场航线和几种着舰工作模式,概述了基于跟踪雷达的着舰引导系统和基于卫星的着舰引导系统的工作原理及关键技术,着重分析了自动着舰的几种控制技术,包括控制律设计技术、直接力控制技术、推力矢量控制技术、甲板运动预估与补偿技术、舰尾气流抑制技术、动力补偿技术以及着舰安全控制技术.最后,从多系统集成着舰控制技术、多体制融合着舰引导技术两方面对自动着舰引导与控制技术进行了展望.
【总页数】11页(P734-744)
【作者】张志冰;甄子洋;江驹;薛艺璇
【作者单位】南京航空航天大学自动化学院,南京,211106;沈阳飞机设计研究所,沈阳,110035;南京航空航天大学自动化学院,南京,211106;南京航空航天大学自动化学院,南京,211106;南京航空航天大学自动化学院,南京,211106
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.基于H2预见控制的舰载机自动着舰控制方法 [J], 邵敏敏;龚华军;甄子洋;江驹
2.舰载机着舰控制综述 [J], 孙成;蒋丰亦
3.基于模糊控制的舰载机着舰指挥官引导系统建模 [J], 李晖;朱齐丹;张智;于梦竹
4.舰载机自动着舰引导控制律参数整定 [J], 李晖;朱齐丹;张智;杨柳
5.抑制尾流扰动的舰载机纵向自动着舰预测控制 [J], 王立鹏;王立辉;张智;朱齐丹因版权原因,仅展示原文概要,查看原文内容请购买。
基于L1自适应着舰纵向控制与特性分析

基于L1自适应着舰纵向控制与特性分析李煜;刘小雄;李吉宽;李刚【摘要】考虑到舰载机着舰在最后阶段受到舰尾气流的不利影响;因此,为了提高舰载机着舰控制系统的鲁棒性,提出一种基于L1自适应控制的纵向着舰控制律设计方法;首先,对舰尾流进行分类并将其转化为控制系统的干扰模型,通过分析舰尾气流特性来构建与之相对应的L1自适应控制律结构;然后,基于L1自适应控制方法设计纵向自动着舰控制律,其中包括设计状态观测器、L1自适应控制律、低通滤波器和自适应律,并且对设计好的系统进行了稳定性分析;最后,讨论不同尺度风速的舰尾流对自动着舰系统的影响规律,并且采用“单因素方差分析法”对不同舰尾流环境下的着舰点进行分析;仿真结果表明不同风速下的舰尾流对着舰精度存在一定影响规律,并且所设计基于L1自适应纵向着舰控制律具有较强的自适应性和抗干扰能力.【期刊名称】《计算机测量与控制》【年(卷),期】2018(026)012【总页数】5页(P120-124)【关键词】L1自适应控制;自动着舰;舰尾流;飞行控制【作者】李煜;刘小雄;李吉宽;李刚【作者单位】西北工业大学自动化学院,西安710072;西北工业大学自动化学院,西安710072;空军试飞局,西安710089;空军试飞局,西安710089【正文语种】中文【中图分类】V2490 引言由于海浪和舰尾流等环境因素对舰载机会产生极大影响,这会严重影响舰载机的着舰精度和成功率。
因此,在着舰最终阶段舰载机必须克服由海浪引起各种舰尾气流所带来的不利影响。
这些影响因素的存在就对舰载机着舰控制系统的快速性和抗干扰性提出了更高的要求。
L1自适应控制方法通过引入低通滤波器将快速自适应与鲁棒性解耦,能够保证系统在实现快速自适应的同时保证良好的鲁棒性。
因此,基于此方法来设计舰载机纵向自动着舰控制律能够很大程度上地抑制舰尾气流对其造成的不利影响。
L1自适应控制方法最初是由Cao Chengyu和Naria Hovakimyan2006年在美国控制会议上提出[1]。
论文精选∣某型舰载机FCLP模拟训练系统设计

论文精选∣某型舰载机FCLP模拟训练系统设计摘要为了解决舰载机陆基着舰训练(field carrier landing practice,FCLP)风险性大、事故发生率高的问题,设计一种基于某型舰载机特点的模拟训练系统。
依据舰载机着舰训练的要求,在传统飞机模拟器基础上对系统组成结构及各分系统进行了详细设计,建立了光学助降系统模型与着舰指挥员模型,并对视景系统进行了优化设计,实现了人工着舰与自动着舰2种指挥模式,并具有飞行回放与讲评功能。
实际应用结果表明:该系统对于提高舰载机飞行员陆基着舰训练技术效果明显,具有较高的军事经济价值。
来源《兵工自动化》2018年第1期《某型舰载机FCLP模拟训练系统设计》作者:田杰荣,张力,韩晨,史存虎。
单位:海军航空兵学院舰载机系,辽宁葫芦岛引用格式田杰荣,张力,韩晨,等。
某型舰载机FCLP模拟训练系统设计[J].兵工自动化,2018, 37(1):01-05.欢迎引用,谢谢!0 引言舰载机飞行操纵技术复杂,训练费用高、难度大、风险高。
飞行员在航空母舰上进行着舰飞行之前,必须先进行陆基模拟着舰训练[1-2]。
FCLP是舰载战斗机飞行员在上舰前的重要训练内容,可以模拟训练着舰关键技术,降低风险、节省成本,减少对主要训练资源的依赖[3]。
在FCLP过程中,飞行员要使用标准的着舰进近程序进行大量的重复练习,建立修正进近误差的感觉,直至熟练地掌握着舰技术。
飞行员在FCLP中的总体水平通常会在实际着舰操作时得到体现。
FCLP是高风险科目,如果舰载机飞行员的训练全部采用实装训练,则有可能出现较高的飞行事故率。
笔者设计的FCLP模拟训练系统作为重要的训练资源,可以使飞行员熟悉操作程序、了解飞机运动规律、掌握特情处置方法、提高心理素质,减少不安全因素;因此,采用模拟训练手段可有效提高飞行员的操控能力、替代部分实装训练、减少事故发生率,是提高舰载机训练安全性的有效手段。
1 系统功能1.1 模拟地面与“空中”操作训练本模拟训练系统提供1:1的座舱仿真环境,使飞行员能够熟悉座舱设备,掌握使用程序,强化习惯养成。
舰载机拦阻着舰纵向载荷的简化算法

r r I w st v laetebo k rp a igp r ee n ac lt h f c f p ra h s e d, i . t a o e au t h lc o e d mpn aa tra dc luaeteef t po c p e e m e oa
徐彦 军,沈文厚,孙 岩
( 海军 飞行 学 院 ,辽 宁 葫芦 岛 150 ) 2 0 1
摘
要 :对于舰载机拦阻着舰纵 向载荷 问题 ,提 出了一种 简便 的计算 方法。应用 这种方法对 拦 阻装置 阻尼参
数进行确定 , 对拦阻载荷与飞机着舰速度、 航母速度 、飞机质量的关系等进行了计算分析。计算方法简单实
c ri rlnd n o gt i a o d c l u ain. a re a i g l n i ud n ll a ac lto
Ke r s: c ri rlndng; lngt d n lla y wo d a re a i o iu i a o d; smp e c c l t n i l a uai l o
条件 为航母 速度 0k ,飞 机速 度 2 0k / ,飞 机 n 4 m h 质量 1.5 ,2 .5 ,2 .5 ,计 算 得 到 了 870t 170t 4 70t 挂钩 以后 飞 机 前 进 距 离 和 纵 向过 载 的关 系 ( 图 见 5 。 图 5中的 曲线 1 ) ,2,3分 别代 表这 3种情 况 。
() 3
2 ,3分别代 表这 3种情 况 。
() 4 、
f )+
l2 /
s
式 中 : 是 拦 阻索 的 甲板跨 度 ; Z k是 拦 阻 索 阻尼 系 数 ; 是拦 阻索夹 角 ( 1 。将式 ( ) 图 ) 4 代人 式 ( ) 1, 在不 考 虑 甲板 摩 擦 力 、推 力 和 气 动 力 的 情 况 下 ,
简单说一下舰载机着舰的过程

简单说一下舰载机着舰的过程为了保证舰载机能够正确的返航和着舰,一般航母都配备有战术空中导航系统、空中交通管制系统和着舰引导系统多个系统,对舰载机进行引导,在现代航母上,这些系统已经能够通过数据总线有机相接,形成综合导航和引导系统,同时还可以与航母编队指挥与战术数据处理系统进行联接,实现资源的共享和作战、归航等作业的更好的协调,一航而言,航母的战术空中导航系统在300公里左右为归航的舰载机提供指挥引导,到了距离母舰100公里处,由空管雷达接手,对返航的飞机进行编组,确定着舰的顺序,然后舰载机进入等待着舰阶段,舰载机按进场队形逆航母前进方向平行于航母的右舷飞行,然后转弯飞跃舰艏,转入顺风段,一直到距离航母大约30公里,在这个阶段由航母上的战术空中导航系统进行引导,到达距离母舰大约10公里处,由舰上的自动着舰系统开始引导,一直到距离母舰大约3公里处,进入舰上光学助降系统工作区域,然后据此着舰,由此可见舰载机着舰短短数分钟内,涉及到众多的系统、人员,要想相关系统和人员能够快速、熟练的工作,需要频繁的训练和演练。
舰载机着舰基本方式是目视方式,主要用于晴朗气象、能见度好的情况下,飞行员进入等待区后,由航母飞行指挥控制室引导,进入等待航线,这个航线是一个直径为5海里的逆时针圆形航线,不同的飞机等待高度不同,最低的等待高度大约在600米左右,舰载机每次经过航母上空的时候,与着舰指挥官进行联系,以便获得着舰许可,考虑到有些飞机执行任务回来后有可能燃料不足,所以在高空还安排了加油机给燃料不足的飞机进行空中加油,在接收到着舰的命令以后,舰载机在距离母舰10公里左右的地方脱离等待航线,高度下降到300米左右,航母后方5公里处进入着舰航线,然后根据着舰飞机的多少,以水平转弯曲或者盘旋动作进入下滑航线,进入下滑航母前,舰载机需要关闭武器系统,确认飞机的重量符合航母着舰的标准,然后打开减速板、放下拦阻钩及起落架等,表示要着舰,飞机在航母左侧一海里外,再次转弯,到达着舰中心延长线的后方,进入光学助降系统的工作范围,然后开始下滑降落。
深圳麒麟实验学校高中物理必修一第二章《匀变速直线运动的研究》检测(含答案解析)

一、选择题1.无风秋日,晚霞满天,一片梧桐叶从高为5m 的枝头自静止飘落至地面,所用时间可能是(g 取10m/s 2)( )A .0.1sB .0.5sC .1sD .3s2.如图所示的图象中,表示物体做匀减速运动的是( )A .B .C .D .3.以10m/s 的速度沿平直公路行驶的汽车,遇障碍物刹车后获得大小为4 m/s 2的加速度,刹车后第3 s 内汽车的位移大小为( )A .12.5 mB .2mC .10 mD .0.5 m4.一辆汽车以20m/s 的速度沿平直公路行驶,突然发现前方有障碍物,立即刹车,汽车做匀减速直线运动,加速度大小为4m/s 2。
从刹车开始计时,6秒内的位移x 的大小与第6秒末的速度v 的大小分别为( )A .48m x =,4m/s v =B .50m x =,0v =C .48m x =,0v =D .50m x =,4m/s v =5.如图所示,甲同学手拿50cm 长的竖直直尺顶端,乙同学把手放在直尺0刻度线位置做抓尺的准备。
某时刻甲同学松开直尺,直尺保持竖直下落,乙同学看到后立即用手抓直尺,手抓住直尺位置的刻度值为30cm ;重复以上实验,丙同学手抓住直尺位置的刻度值为20cm 。
从乙、丙同学看到甲同学松开直尺,到抓住直尺所用时间叫“反应时间”,取重力加速度g =10m/s 2。
则下列说法正确的是( )A .乙同学的“反应时间”比丙小B .乙同学抓住直尺之前的瞬间,直尺的速度为4m/sC.若将尺子上原来的长度值改为对应的“反应时间”值,则“反应时间”刻度是均匀的D.若某同学的“反应时间”大于0.4s,则用该直尺和上述方法将不能测量他的“反应时间”t 时刻的速度6.四个质点做直线运动,运动图像如图所示(选项D中图像对应质点在0为零),其对应的质点不能在4s末回到初位置的是()A.B.C.D.7.一子弹刚击中木块的速度为800m/s,经历0.2s后穿出木块,刚穿出的瞬时速度为500m/s,则子弹穿过木块的加速度是(设子弹射入木块时速度的方向为正方向,子弹在木块内可认为在做匀变速直线运动)()A.-1500m/s2B.-3000m/s2C.1500m/s2D.3000m/s28.如图所示是一火箭竖直上升的v-t图象,以下叙述正确的是()A.在40s末火箭达到上升的最大速度和高度B.火箭上升的最大高度为48kmC.在120s时,火箭加速度的方向发生改变D.在40s时,火箭运动的速度方向发生改变9.对于如图所示的情境,交通法规定“车让人”,否则驾驶员将受到处罚,若以8m/s匀速行驶的汽车即将通过路口,有行人正在过人行横道,此时汽车的前端距停车线8m,该车5m/s,下列说法中正确的是()减速时的加速度大小为2A.驾驶员立即刹车制动,则至少需2s汽车才能停止B.在距停车线6m处才开始刹车制动,汽车前端恰能止于停车线处C.若经0.2s后才开始刹车制动,汽车前端恰能止于停车线处D.若经0.4s后才开始刹车制动,汽车前端恰能止于停车线处10.有一种“傻瓜”照相机,其光圈(进光孔径)随被摄物体的亮度自动调节,而快门(曝光时间)是固定不变的,为估测某架“傻瓜”照相机的曝光时间,实验者从某砖墙前的高处使一个石子自由落下,拍摄石子在空中的照片如图。
航母尾流模拟及舰载机着舰控制的初步研究--优秀毕业论文

分类号学号M********* 学校代码10487 密级硕士学位论文航母尾流模拟及舰载机着舰控制的初步研究学位申请人:安军学科专业:热能工程指导教师:王坤副教授李仁府教授答辩日期:2012年1月6日A Dissertation Submitted in Partial Fulfillment of the Requirementsfor the Degree of Master of EngineeringNumerical Simulation of Aircraft Carrier Airwake and Preliminary Study on Control Law for Automatic Carrier LandingCandidate : An JunMajor : Thermal EngeeringSupervisor : Associate.Prof. Wang KunProf. Li RenfuHuazhong University of Science & TechnologyWuhan 430074,P. R. ChinaJanuary,2012独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除文中已经标明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的研究做出贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
学位论文作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权华中科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
保密□,在____________年解密后适用本授权书。
舰载飞机着舰精确轨迹控制研究

・
5 ・ O
飞机设计第 1 20 年 3 期 06 月
文章编号 :17 — 5 9 20 ) 1 0 5 — 6 6 3 4 9 (0 6 0 — 0 0 0
舰 载 飞 机 着 舰精 确 轨 迹 控 制研 究
张 勇 ,张东光
( 沈阳飞机设计研究所 , 辽宁 沈阳 1 05 1 3) 0 摘 要:针对舰载机着舰过程的精确航迹控制要求 ,利用现有机上的控制设备 ,采用系统综合设计 的方法, 给出了两种航迹控制系统——风参考航迹控制系统和惯性参考航迹控制系统 ,通过仿真分析 ,给出了系统的
p o c o rc mp n a in i c i o t l r a h p we o e s t ;d r tl c nr o e t f o
自5 0年代 中期 以来 。美 国一直致力于发展 舰载飞机 自 动着舰系统( C S ,并将 F 1 A L) -4系列
航迹矢量进行控制 :水平安定面、直接升力操纵 面( 机翼扰 流 片对 称偏 转 ) 、以及 推力 ( 门杆 油
性能差异 。
关键词 :舰 载机 ;航迹控制系统 ; 稳系统 ; 场动力补偿 ;直接力 飞行控 制 增 进
中圈分类 号 :V 7 . 9 ;V 4 . 2 . 2 14 2 2 9 12 3 文献标识 码 :A
Pr cso l h a h Co t o o r ir Ba e e ii n F i tP t n r lf r Ca re - s d g Aic a tLa dng Ap r a h s r r f n i p o c e
Ke r s: c rir b sd arrf; f g tp t o t ls s m ; sa i t a g n t n s s m ; a — y wo d ar - a e i at l h ah c nr yt e c i o e tbly u me t i yt i a o e p
飞行员着舰纵向控制研究
t r o l s y s t e m h a s a g o o d t r a c k i n g c o n t r o l a b i l i t y ,a n d c a n e f f e c t i v e l y r e s t r a i n t h e c a r r i e r a f t l f o w i n l f u e n c e a n d me e t t h e
l 引 言
航空母舰被称为世界上最危险 的作 业机场 , 而舰载机 飞
Z H U Q i - d a n , Z H A O E n - j i a o , Z H A N G We n , Z H A N G Z h i
( C o l l e g e o f A u t o m a t i o n , H a r b i n E n g i n e e r i n g U n i v e r s i t y , H a r b i n He i l o n g j i a n g 1 5 0 0 0 1 , C h i n a )
l o t l o n g i t u d i n a l c o n t r o l l a ws w e r e s t u d i e d wi t h MA T L AB / S i mu l i n k ,a n d t h e t r a c k i n g a b i l i t y o f p i l o t c o n t r o l s y s t e m wa s
r e q u i r e me n t s o f c a r r i e r l a n di n g s fe a l y. K EY W OR DS: Pi l o t mo d e l ; Af t lo f w; Ai r c r ft a c a r r i e r mo v e men t
舰载机着舰侧向轨迹增量控制

舰载机着舰侧向轨迹增量控制
汪节;韩维;王正磊;岳付昌
【期刊名称】《海军航空大学学报》
【年(卷),期】2024(39)1
【摘要】针对舰载机着舰侧向控制难度较大的问题,借鉴美国海军的“魔
毯”(MAGIC CARPET)着舰的先进理念,提出了1种新的着舰控制方法,即侧向轨迹增量控制。
首先,分别从理论上分析了侧向常规控制、侧向轨迹增量控制的控制结构和着舰性能;然后,对HUD显示符号进行改进;最后,通过实时仿真,比较了这2种方法的着舰控制效果。
结果显示,着舰侧向轨迹增量控制具有3个优点:1)简易,降低了飞行员的操纵频次和负担;2)直观,着舰侧向操纵更直观,侧向杆量与飞机侧偏修正速率成正比例,而且当横杆回中时飞机能自动跟踪跑道中心线的横向漂移;3)鲁棒,显著提高了对侧风和舰尾流的抑制能力,即使在飞行员不操纵的情况下,飞机也能迅速反应和抑制风干扰。
因此,建议在着舰工程中采用侧向轨迹增量控制。
【总页数】7页(P108-114)
【作者】汪节;韩维;王正磊;岳付昌
【作者单位】海军航空大学;91475部队
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.航母甲板风对舰载机进舰轨迹流场影响分析
2.舰载机着舰侧向回路的滚动时域控制
3.舰尾流对舰载机着舰轨迹和动态响应的影响研究
4.舰载机横侧向着舰控制律研究
5.预见性护理在经髋关节置换术治疗股骨颈骨折患者中的有效性研究
因版权原因,仅展示原文概要,查看原文内容请购买。
舰载机如何着舰

原文载自《航空周刊》请勿随意转载,劲风收集制作对舰载机飞行员来讲,在航母上着舰是能展示自己高超的驾驶技术并使大伙略英雄本色的最佳机会.因航母上的着舰难度极高,甚至有人说在航母上的着舰是"人为控制的坠落".现在每个舰载机驾驶员都以自己的着舰次数来作为证明自己过硬本领的依据.这里就对大家感到好奇的着舰方式进行详细的叙述.VF-154在大海中驰骋的“跑道”上降落,比“登天”还难对航母舰载机驶员来讲,弹射起飞并不难。
因为弹射器的压力调整、弹射等几乎所有的操作是由飞行甲板上的弹射器小组来负责进行。
难的是着舰.着舰时驾驶员需要从很远处发现航母,确认着舰装置的状态.并与其他着舰机相互进行飞行状态的沟通。
随着航母的航行而时刻变动的飞行航线。
不断摇晃的着舰甲板……,地上飞机驾驶员是无法想像飞行甲板上的着舰难度的。
对飞行员来讲,远离陆上机场在一望无际的大海中进行的着舰是一个沉重的压力。
弹射起飞中的雄猫着舰过程根据离航母的距离可分为引导一待机一进场三个阶段。
着舰机从作战空域返回航母时,首先要接到来自E-2C预警机的指示。
但是E-2C的主要任务是在作战空域里的警戒监视一旦E-2C忙于进行空中预警时,舰载机是无法受到E-2C的导航服务的,此时根据作战空域到航母的距离。
增派一架E-2C预警机担当“导航参谋”的任务,以协助舰载机返航。
舰载机从E-2C预警机得到的情报主要是离所属航母的位置和周边空中交通状况。
tomcat如果舰载机驾驶员发现自己的飞机出现燃料不足或机械故障.可直接与航母通话.使航母调整着舰机的着舰顺序.另外还能根据情况的需要,接受空中加油或通过航母与陆上基地取得联系进行紧急着陆.在正常状态下着舰时,着舰机在离航母200海里(1海里=1.85千米)远处接受航空飞行管制中心的航行管制和指挥,航空飞行管制中心设置在着舰甲板的舰桥下方的战斗指挥所的一角.航空飞行管制中心操作台的显示器上的黄色标志,是通过雷达捕捉到的航母周围200海里半径内的画面.从这里直接向着舰机或其他的己方飞机提供情报.着舰机通过航空飞行管制中心获得离航母的距离方位高度航母的航向.在周围飞行的其他舰载机的位置等情报.通过这些情报,着舰机可确认自己的正确位置,并利用导航计算机安全地接近航母.因为航母是时时刻刻移动的,因此驾驶员需要与航空飞行管制中心保持不间断的联系,不断修正航线.航空飞行管制中心所在的战斗指挥所附近设有航母航空指挥中心(CATCC).在CATCC内设有指挥20~50海里以内空域的着舰机待机操作台,指挥20海里以内空域的着舰机进场操作台,它们由CATCC军官统一指挥.着舰机待机控制台的操作人员向接近的着舰机传达现在的着舰方式,拦阻方式以及着舰开始的位置等.着舰机是从这一阶段开始进入真正的着舰过程.tomcat着舰方式(一)天气状况良好,能见度很好时在航母周围没有云,能见度超过5千米以上时,驾驶员运用目时的方式进行着舰.采用目时方法进行着舰的着舰机在航母上空按长方形航线进行左回旋飞行.此时的航母位于长方形的右边线的中心,这一中心叫Point.1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舰 载 机 纵 向 自动 着 舰 控 制
彭 秀艳 , 志 文 , 王 吴鑫
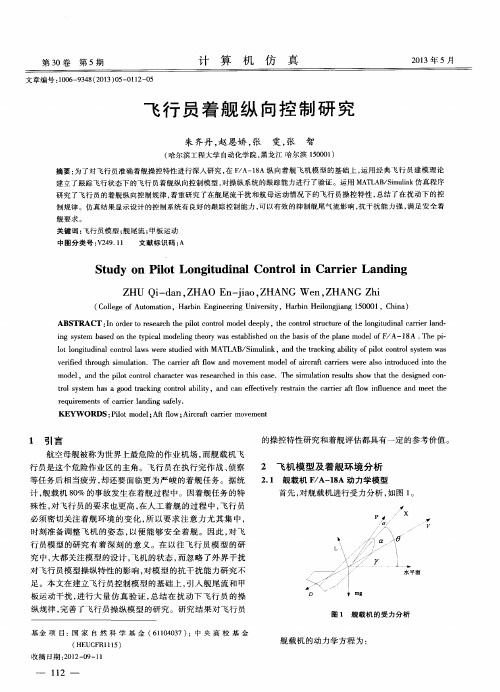
( 尔滨 工程 大学 自动 化 学院 , 龙 江 哈 尔滨 10 0 ) 哈 黑 50 1 摘 要 : 舰 载机 纵 向着 舰 控 制 系统 进 了分 析 和 研 究 , 据舰 船 甲 板 运 动 引 起 舰 载 机 着 舰 点 不 断 变 化 的 问题 , 入 对 根 加
b s d a rr f l n i g e rrwa f ci ey r d c d a d t e s c r y p r r n e o e ln ig wa n a c d w t a e i at a d n ro s ef t l e u e n h e u i ef ma c f h a dn s e h n e i c e v t o t h
律 比常规 的 PD导 引 控 制律 具 有 更 好 的控 制 下 滑 轨迹 的能 力 , 能满 足 着 舰 的需 要 . I 更
关键词 : 自动着舰控制 ; 模糊控制 ; 甲板运动补偿 ; 向导引律 纵
中 图分 类 号 : P 8 V 4 .2 . 文 献 标 识码 : 文章 编 号 : 7 -75 2 1 )20 7 - T I ;2 9 12 5 A 1 3 8 (0 1 0 -120 6 4 6
第 6卷 第 2期 21 0 1年 4月
智
能
系
统
学
报
V0 . № . 16 2 Ap . 01 r2 1
CAAITr n a to s 0 n elg n y t ms a s cin n I tlie tS se
d i 1 . 9 9 j i n 1 7 - 8 . 0 1 0 . 1 o :0 3 6 /.s . 6 34 5 2 1 . 2 0 3 s 7
甲板运 动补 偿 环 节 , 对 补 偿 律进 行 了设 计 ; 常规 的纵 向导 引控 制 律 进 行 了改果 表 仿
明, 引入 甲板运动补偿环节 , 有效地减小了由于 甲板运动造成的着舰误差 , 提高了着舰 的安全性 , 模糊 PD导引控制 I
te a p ia in o h p d c to o e s to e me t.Th e u t lo d mo sr t h tt e f z y PI d rc h p lc t fs i e k moin c mp n a in s g n s o e r s lsa s e n tae t a h u z D ie — t n g i a c o to a i u e irt h o v n in lPI g i a c o to a i o toln h are — a e i u d n e c n rllw s s p ro o t e c n e t a D u d n e c n r llw n c n rli g t e c rirb s d o o
arr f ldng ru i e,b te aif i g t e ie ns o h a re — a e ic atl n ig ic a gi i o tn t e trs tsy n her qur me t fte c rirb s d a r rf a dn .
d c oin c u e o sa t c a g s i h c rirb s d ar r f ln ig p it , d c to o e k m to a s s c n tn h n e n t e a re — a e ica t a d n o n s e k moin c mpe s to e - n ain s g
Ab t a t: sud s c n u td o a re — a e ic a a d n o to y t m. Ba e n t e fc h ts i sr c A t y wa o d c e n a c rirb s d ar r f ln i g c n rls se t s d o h a t ta hp
PENG u a Xi y n,W AGNG h we Z i n,W U Xi n
( o e eo A t ai , ri n i ei n es y H ri 1 0 0 ,C i ) C l g f uo t n Ha nE g e r gU i r t, ab 5 0 1 h a l m o b n n v i n n
Re e r h o a re - a e u o a i o g t d n l s a c n a c r ir b s d a t m t l n iu i a c
a r r f a d n o t o y t m i c a t l n i g c n r ls se
me t r d e n h o e s to a wa ede in d.Th o e to a e c lg i a c o to a wa n swe e a d d a d te c mp n ain lw s r - sg e e c nv n in lv  ̄i a u d n e c nr llw s i r v d t o g h n r d cin o u z I g d n e c n r 1 mp o e hru h te ito u to fa f z y P D uia c o to .Th i l t n r s l n ia e ta h a re - e smuai e ut id c t h tt e c rir o s