2011030306振荡压路机压实的自动控制—吕枝恩
振荡压实技术在公路沥青路面施工中的运用
振荡压实技术在公路沥青路面施工中的运用摘要:对路面进行压实作业是为沥青混凝土施工质量提供保证的一个重要环节,同时也是沥青面层的最后一个施工工序,选择合适的碾压技术和碾压机械是确保公路路面施工质量的一个重要措施,这关系到整个路面工程的最终效果和质量。
因此,本文将对振荡压实技术在公路沥青路面施工中的应用进行分析,以实现对路面建设施工质量进行控制的目的。
关键词:振荡压实技术公路沥青路面施工在社会主义市场经济快速发展的同时,以公路为主的交通建设也得到了迅猛发展,社会对交通产生的依赖性日益增大。
公路中较为常见的就是沥青路面,它所具备的平整度、密实性和耐久性等特征,都直接影响着公路建设工程的质量。
路面压实作业可以增加铺层的密实度和耐久性,进而提高路面对环境和车辆负载的抵抗能力,延长公路的使用寿命。
1 关于振荡压实技术原理的概述振荡压路机上的振荡轮有卧轴式和垂直轴式两种不同结构,它的工作原理是:在振荡轮内安装对称同步旋转的激振偏心块轴,同时要保证两个偏心轴的旋转相位差始终保持在180度,且两者之间的偏心距离相当于偏心质量,在以保证激振力和合力沿着振荡轮圆周径向始终保持0值为条件的情况下会产生激振力偶,在激振力偶作用下,振荡轮在不断改变其所承受的交变扭矩时,还不断对地面产生作用,从而形成前后两个方向的震荡波,进而产生被压实材料的交变剪应变。
以上述情况为前提,在这种水平作用力与振荡轮垂直静载的共同作用下,公路沥青路面的骨料颗粒间的空隙被逐渐消除,从而实现公路沥青路面在水平和垂直两个方向的压实作业。
2 分析振荡压实技术的要点和效果(1)技术要点。
第一,振动压路机和地面之间存有系统共振现象,假设振荡压路机的振动和系统之间的共振差距过远,就会产生非常差的压实效果。
相反,也是如此;第二,通常情况下,在共振频率的范围之外,压路机和共振的频率设计是比较接近的。
假如压路机的频率过高,所传递到地面的能量就会变少,所产生的效果也会变差;第三,系统共振会破坏机器和铺面,且操作手感也不是十分理想。
振荡压实技术在公路沥青路面施工中的应用分析
振荡压实技术在公路沥青路面施工中的应用分析【摘要】随着振荡压路机等现代化公路施工设备的出现和推广,振荡压路机原有的机械结构和压实原理缺陷也得到了有效的弥补。
振荡压实技术所使用的材料受理连续且合理,因而能够显著提高公路沥青路面的寿命和性能,具有较为理想的压实效果,并能够有效克服振荡压路机所存在的不连续性跳振的问题。
本文对振荡压实技术的基本原理进行了分析,并在此基础上探讨了振荡压实技术在公路沥青路面施工过程中的应用措施。
【关键词】振荡压实技术;公路沥青路面;施工中图分类号:x734 文献标识码:a 文章编号:在现阶段的公路沥青路面铺装施工过程中,各类压实机械均存在各种类型的缺陷,主要体现为振动压路机尽管经济性和压实效果较好,但振动作用的产生会对公路表面的被压材料产生破坏作用,特别是应用于桥面施工中时,甚至会对桥梁结构造成破坏;而静态压路机则存在金属和能量的消耗量较大,以及实压效果较差等缺陷。
随着近年来振荡压路机应用范围的逐渐扩大,其所体现的全新机械结构和压实原理都对振荡压路机存在的缺陷进行了有效的弥补。
1 振荡压实技术的基本原理从总体结构方面来看,传统的自行式振动压路机与振荡压路机基本相同,而就其振动压实和作用原理方面来说,两者却存在本质上的差异。
振荡压路机中的振荡轮通常可分为垂直轴式和卧轴式两种结构。
振荡压路机的运行原理在于振荡轮内存在同步旋转、对称安装的激振偏心块,两个偏心轴的偏心距和偏心质量均完全相等,且旋转相位差为180°,从而始终保证了合力和激振力沿振荡轮圆周径向为零,由此形成激振力偶,并由振荡轮承担交变扭矩,进而对地面产生持续性的作用,分别向前后两个方向发出振荡波,使被压实材料出现交变剪应变作用。
在振荡轮处于静荷载状态时,会发生垂直方向的位移,在振荡轮垂直静载与水平作用力的相互影响下,受到碾压的路面材料颗粒会发生错动与共振作用,并重新分布其位置,从而实现了路面材料垂直与水平两个方向上的压实作用,将材料颗粒之间存在的空隙彻底消除。
智能压路机在沥青路面施工质量控制中的应用
摘 要 对 宝马智能压路机的应用展 开试验研 究,找 出对应路段 物理 参考值 E I ( 态变形模 VB 动 量)在压 实过程 中的 变化规律 ,利用该规律 可确定路 面的最佳碾压遍数 。本文还对 E I VB与路 面密度 测试仪 ( Q )测试结果进行 了对 比,证 明它们具有较 好 的线性相 关,进 一步验 证 E I PI V B值和碾 压遍
表 3 实 测值 与预 测值 对 比 表
[ 2]汪祖 民.高速公路 软土 地基 沉 降变 形监 测分 析与 预报 [ ] J. 苏州科技学报 , 0 4 2 :3 2 0 ,( ) 7—4 . 3 [ ]周焕 云 、黄 晓明.高速公路软土地基沉降预测方 法综述 [ ] 3 J.
交 通 运 输 工 程 学 报 ,2 0 0 2,( ) 0—1 . 4 :1 3
命 ,压实质量作为施工质量的一个重要指标 ,其检测 控制措施 日益受到人们关注 。 施工过程 中,传统 的压实度检测方法干扰 工程的 连续 进行 ,只能对 压实 结果 做抽样 调查 。 自 2 0世 纪 8 0年代以来 ,与压路 机 结合 的动 态 压实 测量 系统 在 土方 工程 和道路建设 中就得到 了应用 ,可用于 直接和 连续 表面覆 盖压实控制 。宝马公 司在 2 0世纪 8 0年代 已推出了这种 与压路机结合 的测量系统 ,并经 不断改 良更 新 ,现 已在世界各地广泛使用 。 B M G一 8 D M 智能压路机是 自重 1 的立 O A 14A A 3t 轴转 向双钢轮振动压路机 ,采用模块化设计 ,操作简 单 ,配置齐全 。压路机配备了 自动变 幅压 实系统 ,可 以根据实际工作情况 改 变振 幅 ,调整 压实 能量输 出,
[ ]潘朝慧 、 4 陈记.灰 色预测理论在软基沉降观测 中的应用 [ ] J. 中国市政工程 ,2 0 ,( :2 2 . 0 5 4) 3— 4 [ ]赵俊 明、石名磊 、张宏.灰 色理论 在高速 公路软 土地基沉 降 5 预测 中的应用 [ ] J .公路 交通科技 ,2 0 ,( ) 9— 1 0 5 5 :5 6 . [ ]邓 聚龙.灰 色预测 与决 策 [ .武 汉 :华 中科技 大学 出版 6 M]
振荡压实技术在公路沥青路面施工中的应用(1)

振荡压实技术在公路沥青路面施工中的应用作者:匡浩来源:《城市建设理论研究》2013年第17期摘要:采用振荡压路机压实沥青路面,以新的压实原理和机械结构消除了振动压路机在碾压施工中具有的不利影响,解决了公路沥青路面结构沥青混合料的压实问题,有效提高了沥青面层的碾压质量。
本文探讨了振荡压实技术在公路沥青路面施工中的应用。
关键词:振荡压实技术;公路;沥青;路面施工;应用中图分类号:TU535文献标识码: A 文章编号:由于沥青路面具有表面平整、无接缝、行车舒适、噪音低、施工期短和维修方便等优良特性,当前世界各国的高等级公路大多采用沥青路面,我国也不例外。
目前,我国已经建成的高等级公路中有90%采用了沥青路面。
近些年推出的振荡压路机,以新的压实原理和机械结构弥补了振动压路机的缺陷。
振荡压实使材料受力合理而且连续,克服了振动压路机压实时跳振不连续的缺陷,从而获得良好的压实效果,提高了路面使用性能和寿命。
振荡压实使材料受力合理而且连续,克服了振动压路机压实时跳振所带来的一些弊病,从而获得了良好的压实效果和路面使用的耐久性。
一、振荡压实原理振荡压路机是振荡压实技术的施工设备,其总体结构与自行式振动压路机基本相似,但是其作用原理与振动压实具有本质的区别。
振荡压路机的振荡轮结构可分为卧轴式和垂直轴式两种。
在振荡压路机的振荡轮内对称安装着同步旋转的激振偏心块(轴),两偏心块(轴)的旋转相位差为180 °,偏心质量和偏心距相等,保证激振力和合力沿振荡轮圆周的径向始终为零,产生的激振力偶使振荡轮承受交变转矩,对地面产生持续作用,形成前后方向的振荡波,使被压实材料产生交变剪应变。
同时,在振荡轮静荷载作用下,被压实材料产生垂直位移。
在水平作用力和振荡轮垂直静载的共同作用下,被压实材料的颗粒发生共振、错动,位置重新分布,消除了材料颗粒之间的空隙,实现了对被压实材料在水平和垂直两个方向的压实。
振动轮、振荡轮与被压材料相互作用及颗粒应力状态,见图1。
压路机振动与振荡功能切换的液压系统[实用新型专利]
![压路机振动与振荡功能切换的液压系统[实用新型专利]](https://img.taocdn.com/s3/m/8311bd52fd0a79563d1e72be.png)
专利名称:压路机振动与振荡功能切换的液压系统专利类型:实用新型专利
发明人:朱天锡
申请号:CN201220415270.5
申请日:20120821
公开号:CN202744930U
公开日:
20130220
专利内容由知识产权出版社提供
摘要:压路机振动与振荡功能切换的液压系统是由振动泵、溢流阀、振动马达、振荡马达、平衡阀所组成,所述的振动马达与振荡马达串联在系统油路中,振动马达的左端通过管路连接振动泵,振动泵通过进油管路与油箱相通,振荡马达右端通过回油管路与油箱相通;所述的振动马达油路中并联有电磁换向阀A,所述的振荡马达油路中并联有电磁换向阀B。
本实用新型增加了压路机振动压实功能,前后钢轮可进行单独工作和同时工作、压路机振动与振荡功能的切换,节约了能源,最大程度满足了用户使用要求。
申请人:江苏骏马压路机械有限公司
地址:214500 江苏省泰州市靖江市骥江西路288号
国籍:CN
代理机构:靖江市靖泰专利事务所
代理人:陆平
更多信息请下载全文后查看。
单轮振动压路机技术性能参数计算——单轮振动压路机振动参数与碾压速度的取值

(
单轮振动压路机的碾压速度与打击间隔
碾压速度对土壤铺层的压实效果有着显著的影
响 & 振动压路机尤其如此 % 在铺层厚度一定时 &压路 机传递给填 方 内 的 能 量 & 与 碾 压 遍 数 ’ 和 碾 压 速 度 ( 之比值成正比 % 较低的碾压速度能使铺层材料 在压实力的作用下有足够的时间产生不可逆变形 & 从而更好地改变被压材料的结构 % 然而 & 碾压速度还 与生产率有着密切关系 & 所以碾压速度应存在一个 最佳值 & 这个最佳值就是在不降低压实质量的前提 下 & 选择尽可能高的碾压速度 & 以保证压路机有较高 的生产率 % 在振动压实时 & 土壤颗粒由静止的初始状态变 化为运动状态要有一个过程 % 这个过程持续时间的 长短与土颗粒之间黏聚力 ) 吸附力的大小有关 &也与 振动压路机的静压力有关 * 试验表明 &为了克服土颗 粒之间的黏聚力和吸附力 & 对一般的亚黏土应至少 有 / 次有效的强迫振动 & 才足以使这些土颗粒处于 振动状态 * 也就是说 & 压路机在运行一个振动轮接地 弧长的时间内要不少于 / 个振动周期 * 而振动压路 机的静压力越大 & 土颗粒从静止到运动的转换时间 越短 * 根据上述原则 & 可以估算出振动压路机的碾压 速度 &设图 . 为振动轮滚过铺层的截面图 & 未压实前
本文链接:/Periodical_gcjx200610026.aspx 授权使用:中南大学(zndx),授权号:60c9aa3c-9af4-41f2-bd01-9e06010d641c 下载时间:2010年10月5日
参考文献(3条) 1.尹继瑶 压路机设计与应用 2000 rs Forssblad Vibratory Soil and Rock Fill Compaction 1981 3.Tai-Sung Yoo.Ernest T Selig Dynamics of Vibratory-Roller Compaction 1979(10)
振荡压路机智能化压实的评价标准及优化目标
疆 —曩叫 首先 从 能量 转换 方面 分析 了振 荡 压路 机 的压 实 过程 , 结合 实例 分析 了过度 压 实 与振 松 的 不 良压 实 效果 。通 过
对 实例 的 分析 提 出 了比压 实 功 的概 念 , 在此 基 础上 建 立 了能 量评 价标 ; 并 隹。 随 后 建 立 了 基 于 能 量 平 衡 的 振 荡 压 实 过 程 优 化 控 制 的 目标 函 数 , 今 后 压 实 过 程 中 的 智 能 化 控 制 提 供 了理 论 依 据 。 为
文献 标识 码 : B 文 章 编 号 :0 0 0 3 2 0 )1 0 1 0 1 0 — 3 X( 0 8 1 -0 8 - 4
中 图 分 类 号 : 1 .3 动 或 振 荡 压 路 机 来 说 ,激 振 力 所 作 的 功 是 机 器
发 动 机 施 加 给 滚 轮 的 外 部 功 . 而 被 压 材 料 通 过 阻 尼 所 吸 收
exc si com pacton es ve i and nsufi ent com pac i ar analzed n i fci ton e y i com bi i w ih naton t pr actcal i use. The oncept of c com par ed com pacton i pow eri pr s esent ed,based hi on w ch appr s s andar aial t d of ener s bui Tar gy i l t get f unc i tons f or optm ia i of com pacton ar bui i z ton i e l based ener t on gy bal ance, w hi pr des t ch ovi heor i oundaton f nt l etcalf i or i elgent i c ontol r com pa i of cton.
一种多级振幅的振荡压路机
专利名称:一种多级振幅的振荡压路机专利类型:实用新型专利
发明人:白于洁,陈琦,王燕
申请号:CN202121007453.9
申请日:20210512
公开号:CN215629186U
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本实用新型涉及振荡压路机技术领域,且公开了一种多级振幅的振荡压路机,包括压路机本体、行走轮、固定箱以及压路辊,所述固定箱的左端固定设有刮料板,所述刮料版的内部开设有下料口,所述固定箱的下端固定设有固定板,所述固定板的下端固定设有设备箱,所述设备箱的内部通过第一轴承转动连接有丝杠,所述设备箱的左端固定设有电机,所述丝杠的左端穿过设备箱的左端内部与电机的输出端固定连接,所述丝杠的杆壁上螺纹连接有滑块,两个所述连接杆的上端均开设有条形口,两个所述连接杆的下端共同固定连接有连接板。
本实用新型能够将压路辊表面粘连的沥青刮落在路面上,而且能够将刮落的沥青摊平在路面上进行压实。
申请人:中交二公局东萌工程有限公司
地址:710000 陕西省西安市高新区信息大道2号企业壹号公园19号
国籍:CN
代理机构:天津协众信创知识产权代理事务所(普通合伙)
代理人:刘斌
更多信息请下载全文后查看。
压路机压实及检测技术分析
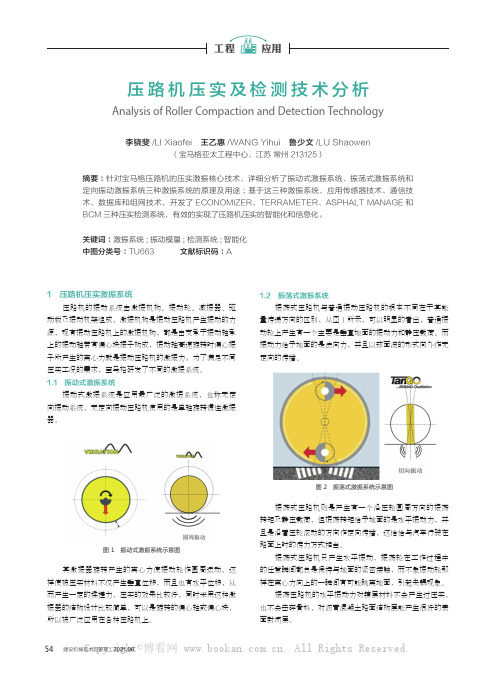
压路机压实及检测技术分析Analysis of Roller Compaction and Detection Technology李骁斐/LI Xiaofei 王乙惠/WANG Yihui 鲁少文/LU Shaowen(宝马格亚太工程中心,江苏 常州 213125)摘要:针对宝马格压路机的压实激振核心技术,详细分析了振动式激振系统、振荡式激振系统和定向振动激振系统三种激振系统的原理及用途;基于这三种激振系统,应用传感器技术、通信技术、数据库和组网技术,开发了ECONOMIZER、TERRAMETER、ASPHALT MANAGE 和BCM 三种压实检测系统,有效的实现了压路机压实的智能化和信息化。
关键词:激振系统;振动模量;检测系统;智能化中图分类号:TU663 文献标识码:A1 压路机压实激振系统压路机的振动系统由激振机构、振动轮、减振器、驱动板及振动机架组成,激振机构是振动压路机产生振动的力源,现有振动压路机上的激振机构,都是由支承于振动轴承上的振动轴带有偏心块振子构成,振动轴高速旋转时偏心振子所产生的离心力就是振动压路机的激振力;为了满足不同压实工况的需求,宝马格研发了不同的激振系统。
1.1 振动式激振系统振动式激振系统是应用最广泛的激振系统,也称无定向振动系统,无定向振动压路机使用的是单轴旋转惯性激振器。
其激振器旋转产生的离心力使振动轮作圆周运动,这样使被压实材料不仅产生垂直位移,而且也有水平位移,从而产生一定的揉搓力,压实的效果比较好,同时采用这种激振器的结构设计比较简单,可以是旋转的偏心轴或偏心块,所以被广泛应用在各种压路机上。
1.2 振荡式激振系统振荡式压路机与普通振动压路机的根本不同在于其能量传递方向的区别,从图1所示,可以明显的看出,普通振动轮上产生有一个主要是垂直地面的振动力和静压载荷。
而振动力给予地面的是法向力,并且以球面波的形式向外作无定向的传播。
振荡式压路机则是产生有一个沿压轮圆周方向的振荡转矩及静压载荷,但振荡转矩给予地面的是水平振动力,并且是沿着压轮滚动的方向作定向传播,这恰恰与汽车行驶在路面上时的传力方式相当。
压路机多振幅振动装置
压路机多振幅振动装置
Chi,S.;蔡志刚
【期刊名称】《国外工程机械》
【年(卷),期】1989(015)004
【总页数】4页(P21-24)
【作者】Chi,S.;蔡志刚
【作者单位】不详;不详
【正文语种】中文
【中图分类】U415.521
【相关文献】
1.振动/振荡压路机名义振幅与振动模型的讨论 [J], 姜右良;黄律钤
2.振动压路机振动轮振幅的探讨 [J], 赵利军;冯忠绪;赵丽萍;魏文澜
3.振动压路机振幅对沥青路面压实度影响的研究 [J], 曾丹;曹源文;余锐;魏亚
4.振动压路机振幅对沥青路面压实度影响的研究 [J], 李成名;
5.可变振幅型振动压路机与一般振动压路机的对比分析 [J], 尚春义
因版权原因,仅展示原文概要,查看原文内容请购买。
用单片机实现压路机自动作业
用单片机实现压路机自动作业
魏波
【期刊名称】《微计算机应用》
【年(卷),期】1999(020)003
【摘要】介绍了基于单片机的压路机自动作业系统的原理、系统组成和硬件结构,介绍了系统软件的设计方法和编程技巧以及为了提高系统抗干扰能力所采取的措施,该系统已实际应用于自动作业压路机样车上。
【总页数】4页(P186-189)
【作者】魏波
【作者单位】中国人民解放军国防科工委指挥技术学院
【正文语种】中文
【中图分类】TU661
【相关文献】
1.用单片机控制的自动调频拖式振动压路机 [J], 高文中;李俊
2.接触网作业车自动控制作业平台的实现 [J], 单亚男;刘志奇;武宗才;侯云辉
3.用单片机实现野外作业仪表的加热和备用电池充电 [J], 于振生
4.用单片机实现野外作业仪表的加热和备用电池充电 [J], 于振生
5.基于51单片机的自动化视力保护系统的设计与实现 [J], 罗文涣;鄢艳红
因版权原因,仅展示原文概要,查看原文内容请购买。
公路沥青路面施工中振荡压实技术的应用_2
公路沥青路面施工中振荡压实技术的应用发布时间:2022-08-08T01:19:19.300Z 来源:《工程建设标准化》2022年第3月第6期作者:章力[导读] 现如今,振荡压实技术在公路沥青路面施工过程中得到广泛应用并推广,在很大程度上有效弥补了传统沥青压路机在施工过程中存在的缺陷与不足。
该技术不仅可以使各种材料间的受力合理且连续,还可以达到较好的振荡压实效果,大大提升公路沥青路面的使用性能,延长其使用寿命。
章力浙江交工集团股份有限公司浙江省杭州市 310051摘要:现如今,振荡压实技术在公路沥青路面施工过程中得到广泛应用并推广,在很大程度上有效弥补了传统沥青压路机在施工过程中存在的缺陷与不足。
该技术不仅可以使各种材料间的受力合理且连续,还可以达到较好的振荡压实效果,大大提升公路沥青路面的使用性能,延长其使用寿命。
下文就对公路沥青路面施工中振荡压实技术的应用展开探讨。
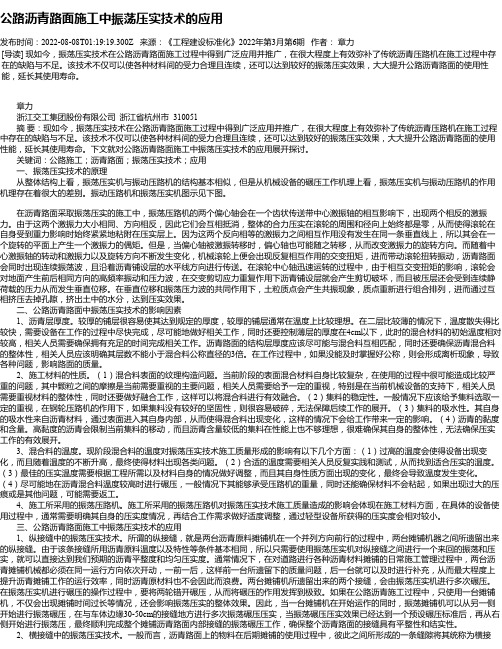
关键词:公路施工;沥青路面;振荡压实技术;应用一、振荡压实技术的原理从整体结构上看,振荡压实机与振动压路机的结构基本相似,但是从机械设备的碾压工作机理上看,振荡压实机与振动压路机的作用机理存在着很大的差别。
振动压路机和振荡压实机图示见下图。
在沥青路面采取振荡压实的施工中,振荡压路机的两个偏心轴会在一个齿状传送带中心激振轴的相互影响下,出现两个相反的激振力。
由于这两个激振力大小相同、方向相反,因此它们会互相抵消,整体的合力压实在滚轮的周围和径向上始终都是零,从而使得滚轮在自身受到重力影响时始终紧紧地粘附在压实层上。
因为这两个反向相等的激振力之间相互作用没有发生在同一条垂直线上,所以其会在一个旋转的平面上产生一个激振力的偶矩。
但是,当偏心轴被激振转移时,偏心轴也可能随之转移,从而改变激振力的旋转方向。
而随着中心激振轴的转动和激振力以及旋转方向不断发生变化,机械滚轮上便会出现反复相互作用的交变扭矩,进而带动滚轮扭转振动,沥青路面会同时出现连续振荡波,且沿着沥青铺设层的水平线方向进行传送。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统构成
对控制对象的工作状态能进行自动控制的系统称为自动控制系统,一般由控制器与控制对象组成,控制方式可分为连续控制与反馈控制,即一般所称,开回路与闭回路控制。
连续控制系统的输出量对系统的控制作用没有任何影响,也就是说,控制端与控制对象为单向作用,这样的系统亦称开回路系统。
反馈控制是指将所要求的设定值与系统的输出值做比较,求其偏差量,利用这偏差量将系统输出值使其与设定值调为一致。
ntroller
P
0.5Ku
PI
0.45Ku
0.83Tu
PID
0.6Ku
0.5Tu
0.125Tu
表4-4Ziegler-Nichols第一个调整法则建议PID调整值[9]
2
Step 1:以MATL AB里的Simulink绘出反馈方块,如下图4-5所示。
(2)在线调整:实际系统中在PID控制器输出电流信号装设电流表,调P值观察电流表是否有一定的周期在动作,利用Ziegler-Nichols把PID求出来,PID值求法与Relay feedback一样。
(3)波德图&跟轨迹:在MATLAB里的Simulink绘出反馈方块图。转移函数在用系统辨识方法辨识出来,之后输入指令算出PID值。[13]
基于MATLAB的PID控制器设计
摘要
PID控制是迄今为止最通用的控制方法,大多数反馈回路用该方法或其较小的变形来控制。PID控制器(亦称调节器)及其改进型因此成为工业过程控制中最常见的控制器(至今在全世界过程控制中用的84%仍是纯PID调节器,若改进型包含在内则超过90%)。在PID控制器的设计中,参数整定是最为重要的,随着计算机技术的迅速发展,对PID参数的整定大多借助于一些先进的软件,例如目前得到广泛应用的MATLAB仿真系统。本设计就是借助此软件主要运用Relay-feedback法,线上综合法和系统辨识法来研究PID控制器的设计方法,设计一个温控系统的PID控制器,并通过MATLAB中的虚拟示波器观察系统完善后在阶跃信号下的输出波形。
所以对有较大惯性和(或)滞后的被控对象,比例+微分(PD)的控制器能改善系统在调节过程中的动态特性。[12]
PID最佳调整法与系统仿真
PID
1.PID参数整定方法
(1)Relay feedback:利用Relay的on-off控制方式,让系统产生一定的周期震荡,再用Ziegler-Nichols调整法则去把PID值求出来。
反馈控制系统方块图一般如图2-1所示:
图2-1反馈控制系统方块图
PID
将感测与转换器输出的讯号与设定值做比较,用输出信号源(2-10v或4-20mA)去控制最终控制组件。在工程实际中,应用最为广泛的调节器控制规律为比例积分微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近60年的历史了,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要和可靠的技术工具。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它设计技术难以使用,系统的控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统的参数的时候,便最适合用PID控制技术。
Keywords: PID parameter setting;PID controller;MATLAB simulation;cooling machine
引言
课题的来源和意义
任何闭环的控制系统都有它固有的特性,可以有很多种数学形式来描述它,如微分方程、传递函数、状态空间方程等。但这样的系统如果不做任何的系统改造很难达到最佳的控制效果,比如快速性稳定性准确性等。为了达到最佳的控制效果,我们在闭环系统的中间加入PID控制器并通过调整PID参数来改造系统的结构特性,使其达到理想的控制效果。
比例、积分、微分
1.比例
图2-2比例电路
公式(2-1)
2.积分器
图2-3积分电路
公式(2-2)
图2-4微分电路
3.微分器
(式2-3)
实际中也有PI和PD控制器。PID控制器就是根据系统的误差利用比例积分微分计算出控制量,控制器输出和控制器输入(误差)之间的关系在时域中如公式(2-4)和(2-5):
u(t)=Kp(e(t)+Td + )公式(2-4)
2.PID调整方式
图4-1 PID调整方式
如上描述之PID调整方式分为有转函数和无转移函数,一般系统因为不知转移函数,所以调PID值都会从Relay feedback和在线调整去着手。波德图及根轨迹则相反,一定要有转移函数才能去求PID值,那这技巧就在于要用系统辨识方法,辨识出转移函数出来,再用MATLAB里的Simulink画出反馈方块图,调出PID值。[15]
1
图4-3Relay feedback调整法
如上图4-3所示,将PID控制器改成Relay,利用Relay的On-Off控制,将系统扰动,可得到该系统于稳定状态时的震荡周期及临界增益(Tu及Ku),在用下表4-4的Ziegler-Nichols第一个调整法则建议PID调整值,即可算出该系统之Kp、Ti、Tv之值。
青 岛 科 技 大 学
课 程 设 计 (论 文)
题 目__________________________________
__________________________________
指导教师__________________________
辅导教师__________________________
所以整理出来,调PID值的方法有在线调整法、Relay feedback、波德图法、根轨迹法。前提是要由系统辨识出转移函数才可以使用波德图法和根轨迹法,如下图4-2所示。
针对无转移函数的
在一般实际系统中,往往因为过程系统转移函数要找出,之后再利用系统仿真找出PID值,但是也有不需要找出转移函数也可调出PID值的方法,以下一一介绍。
U(s)=[ + ]E(s)公式(2-5)
公式中U(s)和E(s)分别为u(t)和e(t)的拉氏变换, , ,其中 、 、 分别为控制器的比例、积分、微分系数[14]
P
比例(P)控制
比例控制是一种最简单的控制方式。其控制器的输出与输入误差讯号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分(D)控制
在微分控制中,控制器的输出与输入误差讯号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性的组件(环节)和(或)有滞后(delay)的组件,使力图克服误差的作用,其变化总是落后于误差的变化。解决的办法是使克服误差的作用的变化要有些“超前”,即在误差接近零时,克服误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使克服误差的控制作用等于零,甚至为负值,从而避免了被控量的严重地冲过头。
关键词:PID参数整定;PID控制器;MATLAB仿真;冷却机;
Abstract:Pid control is the most common control method up until now; the great majority feedback loop is controlled by this method or its small deformation. Pid controller (claim regulator also) and its second generation so become the most common controllers in the industry process control (so far, about 84% of the controller being used is the pure pid controller, it’ll exceed 90% if the second generation included). Pid parameter setting is most important in pid controller designing, and with the rapid development of the computer technology, it mostly recurs to some advanced software, for example, matlab simulation software widely used now. this design is to apply that soft mainly use Relay feedback law and synthetic method on the line to study pid controller design method, design a pid controller of temperature control system and observe the output waveform while input step signal through virtual oscilloscope after system completed.
学生姓名__________________________
学生学号__________________________
_______________________________院(部)____________________________专业________________班